назначение и устройство, обслуживание и ремонт
Двигатель – пожалуй, самый ответственный агрегат в автомобиле. Именно он вырабатывает крутящий момент для дальнейшего движения машины. В основе конструкции ДВС лежит кривошипно-шатунный механизм. Назначение и устройство его будет рассмотрено в нашей сегодняшней статье.
Конструкция
Итак, что это за элемент в двигателе?
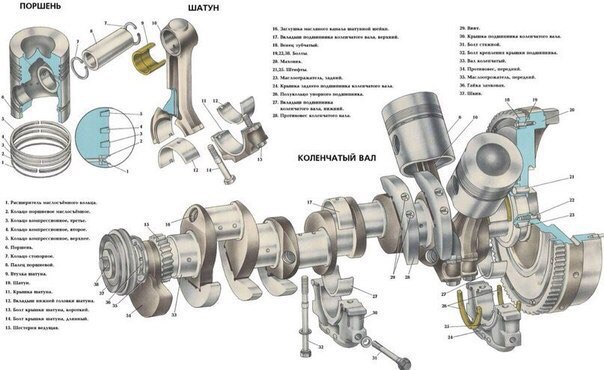
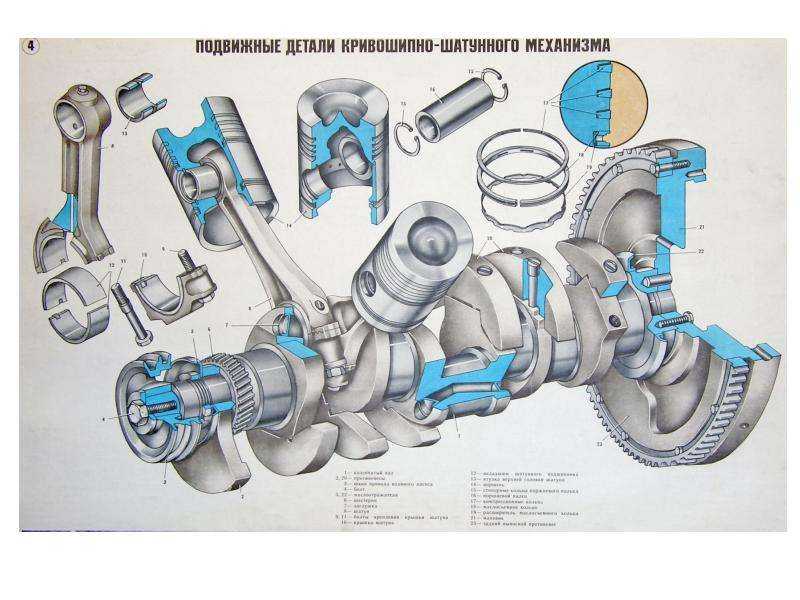
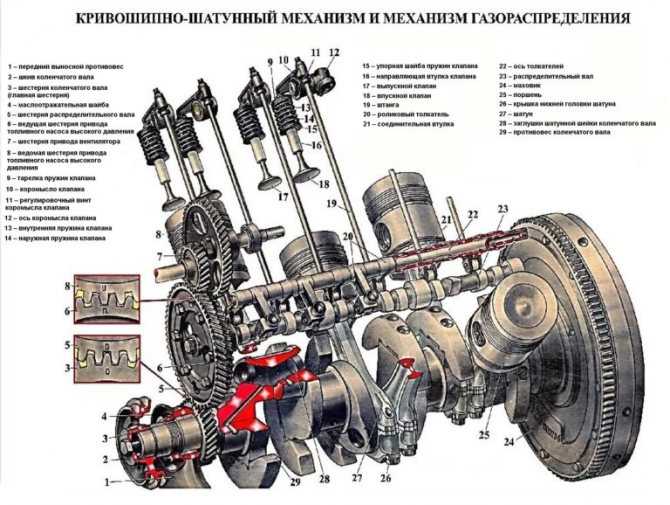
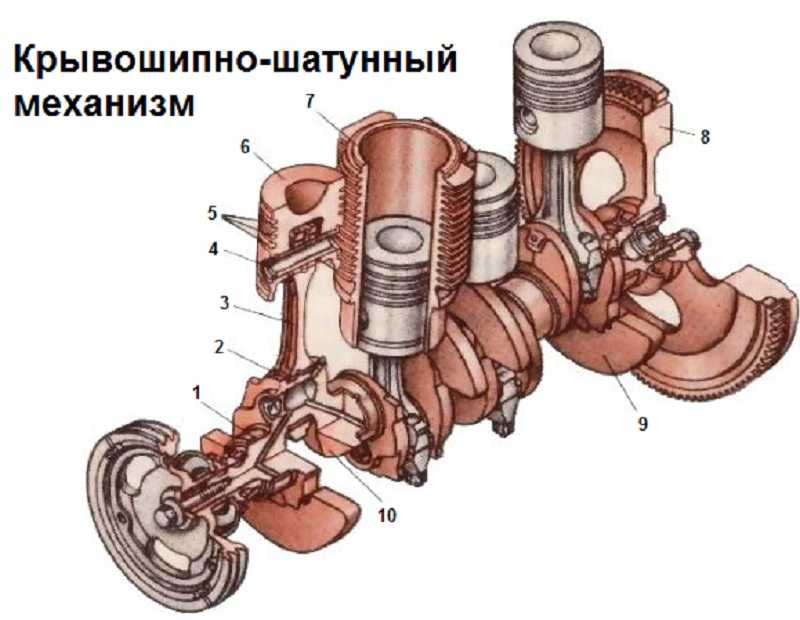
Данный механизм воспринимает энергию давления газов и преобразует его в механическую работу. КШМ двигателя внутреннего сгорания объединяет в себе несколько составляющих, а именно:
- поршень;
- шатун;
- коленчатый вал со вкладышами;
- кольца и втулки.
В совокупности они образуют цилиндро-поршневую группу. Каждая деталь кривошипно-шатунного механизма делает свою работу. При этом элементы взаимосвязаны между собой. Каждая деталь имеет свое устройство и назначение. Кривошипно-шатунный механизм должен выдерживать повышенные ударные и температурные нагрузки. Это обуславливает надежность силового агрегата в целом. Далее мы подробно расскажем о каждой из перечисленных выше составляющей.
Далее мы подробно расскажем о каждой из перечисленных выше составляющей.
Поршень
Данная деталь кривошипно-шатунного механизма воспринимает давление расширяющихся газов после воспламенения горючей смеси в камере. Поршень изготавливается из сплавов алюминия и осуществляет возвратно-поступательные движения в гильзе блока. Конструкция поршня объединяет в себя головку и юбку. Первая может иметь разную форму: вогнутую, плоскую или выпуклую.
На 16-клапанных двигателях ВАЗ зачастую используются поршни с выемками. Они служат для предотвращения столкновения головки поршня с клапанами в случае обрыва ремня ГРМ.
Кольца
Также в конструкции есть кольца:
- маслосъемное;
- компрессионные (две штуки).
Последние препятствуют утечкам газов в картер двигателя. А первые служат для удаления излишков масла, что остается на стенках цилиндра при осуществлении хода поршня. Чтобы поршень соединился с шатуном (о нем мы расскажем ниже), в его конструкции также предусмотрены бобышки.
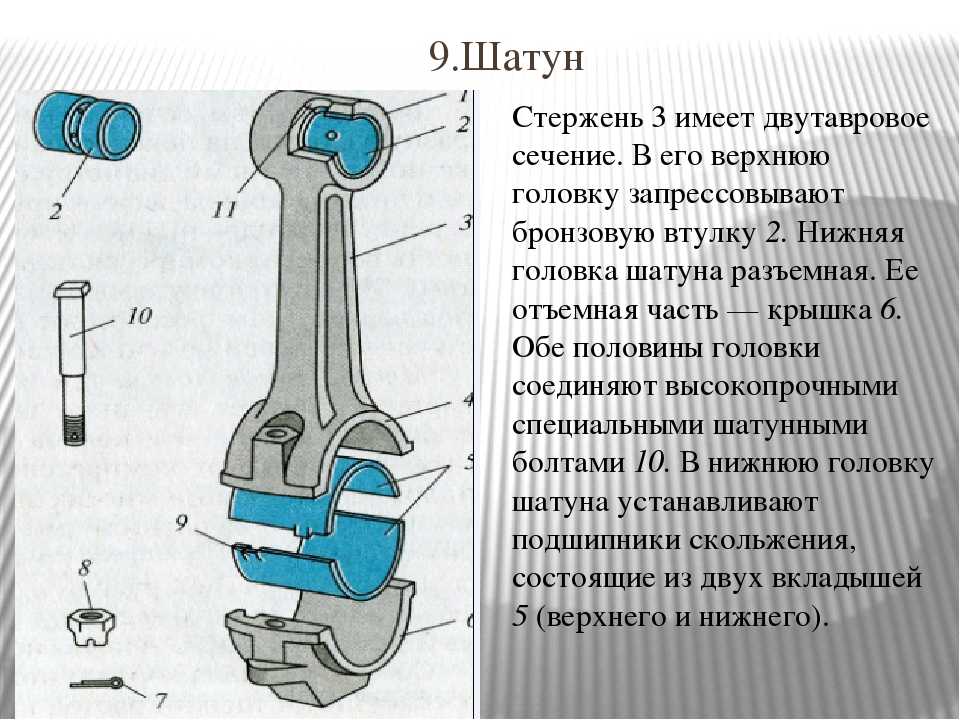
Шатун
Работа кривошипно-шатунного механизма не обходится без этого элемента. Шатун передает толкательные усилия от поршня на коленвал. Данные детали машин и механизмов имеют шарнирное соединения. Обычно шатуны изготавливаются путем ковки или штамповки. Но на спортивных двигателях используются титановые литые элементы. Они более устойчивы к нагрузкам и не деформируются в случае большого толчка.
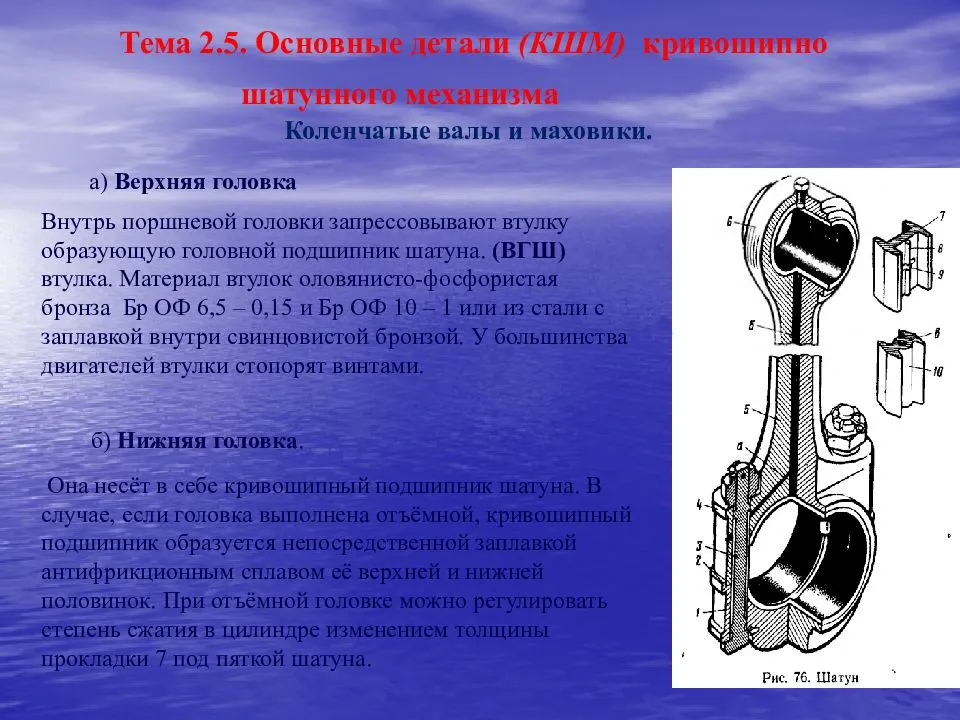
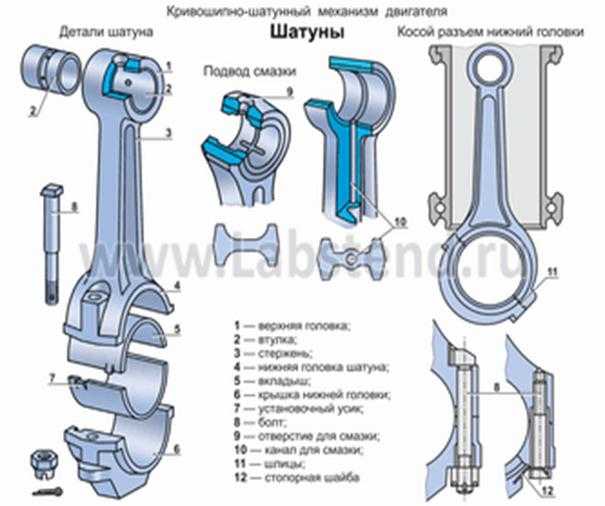
Каково устройство и назначение кривошипно-шатунного механизма? Конструктивно шатун состоит из трех частей:
- верхней головки;
- стрежня;
- нижней головки.
Вверху данный элемент соединяется с поршнем при помощи пальца. Вращение детали осуществляется в тех самых бобышках. Такой тип пальца называется плавающим. Стержень у шатуна имеет двутавровое сечение. Нижняя часть является разборной. Это нужно для того, чтобы производить его демонтаж с коленчатого вала в случае неисправностей. Нижняя головка соединяется с шейкой коленчатого вала. Устройство последнего мы рассмотрим прямо сейчас.
Устройство последнего мы рассмотрим прямо сейчас.
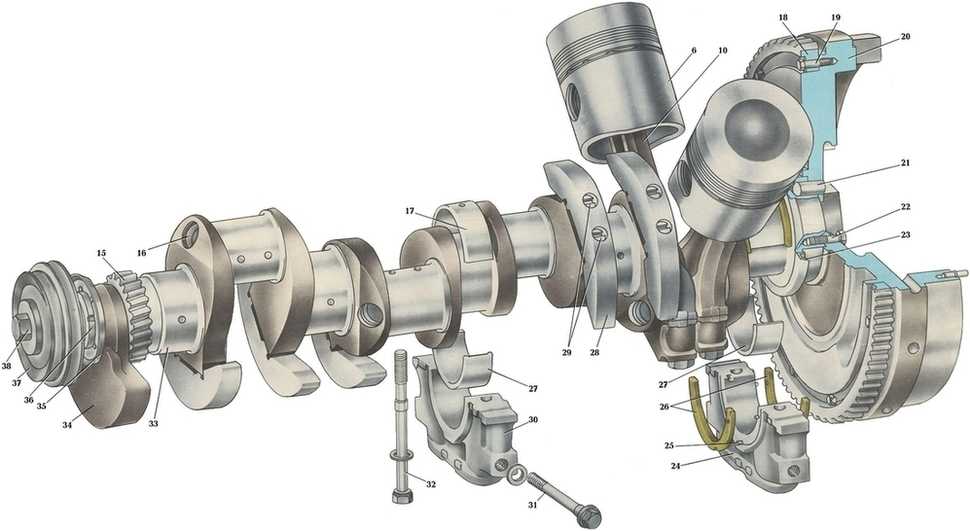
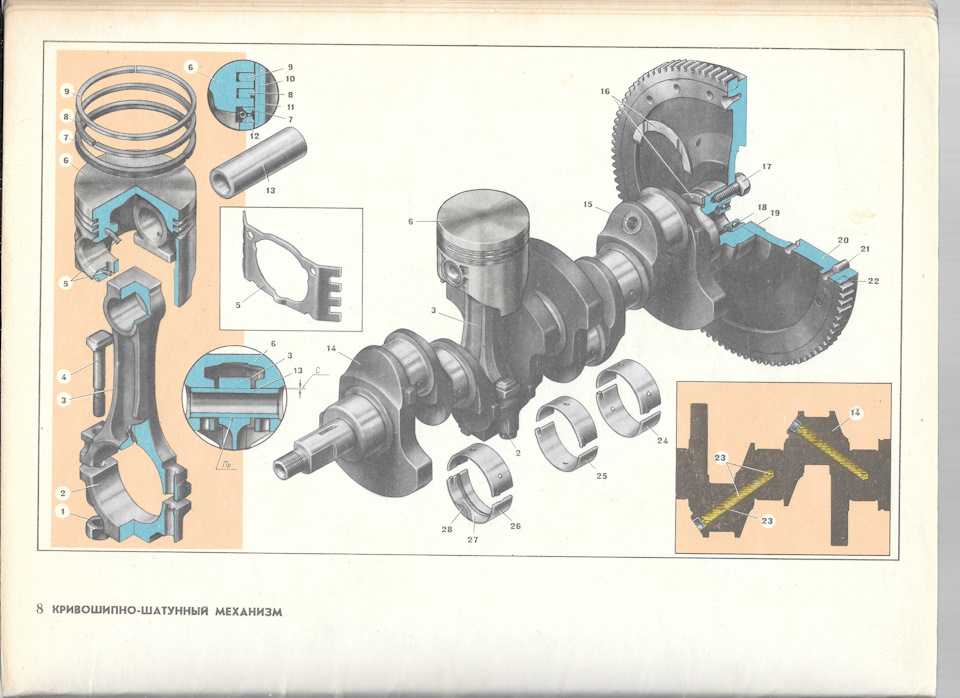
Коленчатый вал
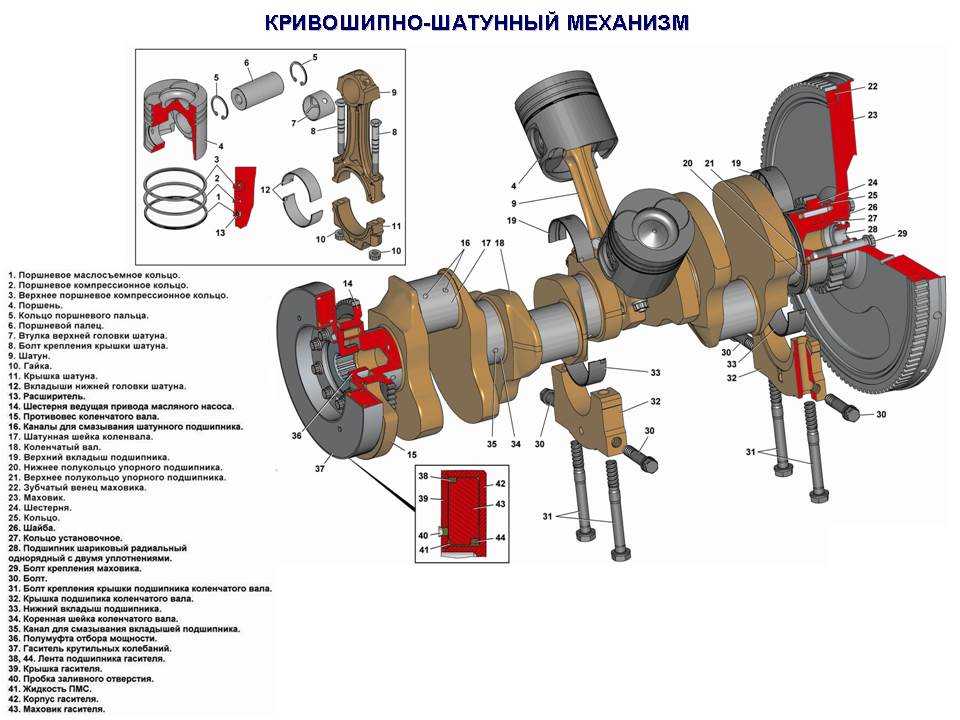
Данный элемент является основной составляющей в устройстве кривошипно-шатунного механизма. Назначение его в следующем. Коленчатый вал воспринимает нагрузки от шатуна. Далее он преобразует их в крутящий момент, который впоследствии передается на коробку через механизм сцепления. На конце вала закреплен маховик. Именно он является заключительной частью в конструкции двигателя. Может быть одно- и двухмассовым. На конце имеет зубчатый венец. Он нужен для зацепления с шестерней стартера в случае запуска двигателя. Что касается самого вала, он изготавливается из высокопрочных сортов стали и чугуна. Элемент состоит из шатунных и коренных шеек, что соединяются «щеками». Последние вращаются во вкладышах (подшипники скольжения) и могут быть разъемными. Внутри щек и шеек есть отверстия для подачи масла. Смазка проникает под давлением от 1 до 5 Бар, в зависимости от нагруженности ДВС.
Во время работы двигателя может возникать дисбаланс вала. Чтобы его предотвратить, в конструкции предусмотрен гаситель крутильных колебаний. Он являет собой два металлических кольца, что соединяются через упругую среду (моторное масло). На внешнем кольце гасителя имеется ременной шкив.
Чтобы его предотвратить, в конструкции предусмотрен гаситель крутильных колебаний. Он являет собой два металлических кольца, что соединяются через упругую среду (моторное масло). На внешнем кольце гасителя имеется ременной шкив.
Типы ЦПГ
На данный момент существует несколько разновидностей цилиндропоршневой группы. Наиболее популярная – рядная конструкция. Она применяется на всех 4-цилиндровых двигателях. Также есть рядные «шестерки» и даже «восьмерки». Данная конструкция предполагает размещение оси цилиндров в одной плоскости. Рядные двигатели отличаются высокой сбалансированностью и малой вибрацией.
Существует также и V–образная конструкция, которая пошла от американцев. Схема кривошипно-шатунного механизма V-8 представлена ниже на фото.
Как видите, здесь цилиндры располагаются в двух плоскостях. Обычно они находятся под углом от 75 до 90 градусов относительно друг друга. Благодаря такой конструкции, можно существенно сэкономить место в подкапотном пространстве. Примером могут послужить 6-цилиндровые моторы от «Опель» С25ХЕ. Этот V-образный двигатель без проблем размещается под капотом поперечно. Если взять рядную «шестерку» от переднеприводного «Вольво», она будет заметно скрадывать место под капотом.
Примером могут послужить 6-цилиндровые моторы от «Опель» С25ХЕ. Этот V-образный двигатель без проблем размещается под капотом поперечно. Если взять рядную «шестерку» от переднеприводного «Вольво», она будет заметно скрадывать место под капотом.
Но за компактность приходится платить меньшей виброустойчивостью. Еще одна схема размещения цилиндров – оппозитная. Практикуется на японских автомобилях «Субару». Оси цилиндров размещены тоже в двух плоскостях. Но в отличие от V-образной конструкции, здесь они находятся под углом 180 градусов. Основные плюсы – низкий центр тяжести и отличная балансировка. Но такие двигатели очень дорогие в производстве.
Ремонт и обслуживание кривошипно-шатунного механизма
Обслуживание любого КШП предполагает лишь регулярную замену масла в двигателе. В случае ремонта уделяется внимание следующим элементам:
- Кольцам поршней. При залегании они меняются на новые.
- Вкладышам коленчатого вала. При существенной выработке или проворачивании подшипника скольжения – замена на новый.
- Поршневым пальцам. Они тоже имеют выработку.
- Самим поршням. При детонации возможен прогар головки, что влечет за собой снижение компрессии, троение, жор масла и прочие неполадки с двигателем.
Зачастую подобные неисправности возникают при несвоевременной замене масла и фильтра, а также при использовании низкооктанового бензина. Также ремонт КШМ может понадобится при постоянных нагрузках и при высоком пробеге. Детали машин и механизмов обычно имеют высокий запас прочности. Но есть случаи, когда вкладыши проворачивало уже на 120 тысячах километров, прогорали клапаны и поршни. Все это является следствием несвоевременного обслуживания силового агрегата.
Итак, мы выяснили, что являет собой кривошипно-шатунный механизм, из каких элементов он состоит.
Кривошипно-шатунный механизм автомобильного двигaтeля
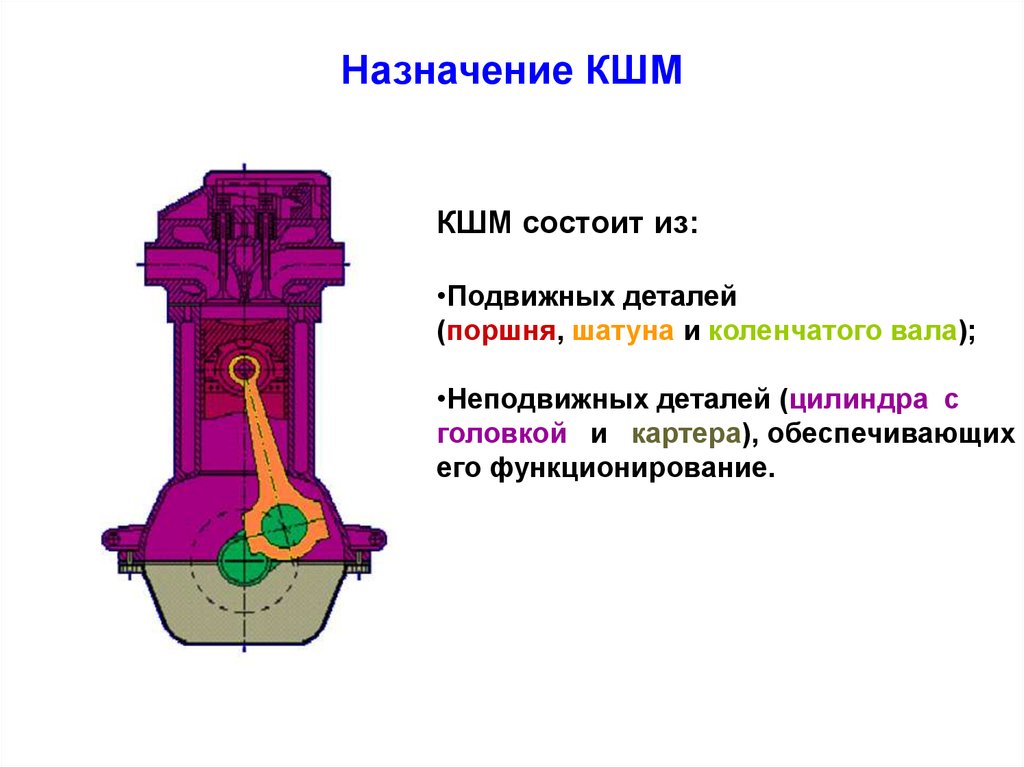
Кривошипно-шатунный механизм (аббревиатура — КШМ) —комплекс движущихся и фиксированных на одном месте деталей.
Оглавление
- Назначение кривошипно-шатунного механизма (КШМ)
- Из чего состоит КШМ
- Подвижная группа КШМ
- Неподвижная группа
- Принцип работы кривошипно-шатунного механизма
- Основные неисправности
- Кривошипно-шатунный механизм, 3D анимация
Они необходимы для превращения возвратно-поступательных движений коленвала во вращательные. Гарантируют нормальную работу двигателя, но требуют контроля и устранения неисправностей. Ниже рассмотрим, из каких элементов состоит механизм, на каком принципе работает, и какие возможны поломки в процессе эксплуатации.
Гарантируют нормальную работу двигателя, но требуют контроля и устранения неисправностей. Ниже рассмотрим, из каких элементов состоит механизм, на каком принципе работает, и какие возможны поломки в процессе эксплуатации.
Назначение кривошипно-шатунного механизма (КШМ)
Важно
Ключевое назначение кривошипно-шатунного механизма состоит в принятии давления газов, которые появляются при сжигании горючего в рабочей камере, и преобразования во вращательное движение коленвала.
В итоге имеет место преобразование движения коленчатого вала (одного из главных устройств механизма) во вращение колес. Работа происходит с минимальными потерями, обеспечивающими высокий КПД. Эффективность работы коленвала зависит от эффективности конструкции и правильности обслуживания.
Из чего состоит КШМ
Конструктивно в состав КШМ входит блок цилиндров (БЦ), состоящий из поршней и цилиндров с гильзами. Также в состав входят шатуны для соединения поршней и коленчатых валов, сам коленвала и маховик. Условно устройство кривошипно-шатунного механизма предусматривает наличие двух групп элементов:
Условно устройство кривошипно-шатунного механизма предусматривает наличие двух групп элементов:
- Подвижные: поршни с кольцами и пальцами, коленвал, шатуны и маховик.
- Фиксированные: картер, головка блока цилиндров (ГБЦ), БЦ с прокладкой и поддон.
Ниже рассмотрим особенности, конструкцию и назначение элементов.
Подвижная группа КШМ
К этой категории относятся элементы КШМ, которые при работе механизма находятся в движении. Выделим основные:
- Поршень. После пуска силового агрегата перемещается внутри цилиндра, благодаря давлению газов, возникающему после воспламенения топливной смеси в камере сгорания. Снизу в роли действующей силы выступает коленчатый вал.
- Поршневые кольца. Размещены в специальных углублениях на поршнях и движутся вместе с ними. Компрессионные предназначены для обеспечения герметичности цилиндра и защиты от прохождения газов в нижнюю часть двигателя. Маслосъемные используются для равномерного распределения смазки и отвода тепла.

- Шатун. Подвижный элемент кривошипно-шатунного механизма двигателя, объединяющий поршень и коленчатый вал. Сверху он зафиксирован на поршне с применением так называемого пальца, а снизу на головке предусмотрена съемная деталь для фиксации на шейке коленвала. Для снижения трения монтируются подшипники скольжения, созданные в виде пары полукруглых пластин.
- Коленчатый вал. Главный элемент силового агрегата, обеспечивающий его работу. Базовой частью является вращающаяся ось, выступающая в качестве опоры в БЦ. Выделяющиеся элементы используются для подключения шатунов.
- Маховик. Фиксируется на фланце сбоку коленчатого вала. Вращается одновременно с валом силового агрегата и гасит рывки, возникающие в процессе работы. Главная функция узла состоит в раскрутке коленвала, а с ним и перемещение цилиндров.
Рассмотренные выше элементы находятся в постоянной динамике, поэтому требуют особого контроля при эксплуатации и ремонте.
Неподвижная группа
К этой категории относятся элементы КШМ двигателя, которые в процессе работы фиксированы и никак не перемещаются. Рассмотрим назначение основных:
Рассмотрим назначение основных:
- БЦ. Представляет собой кожух, имеющий внутри определенную форму для цилиндров и других рабочих элементов. В нем предусмотрено множество каналов для движения охлаждающей жидкости, крепления под распределительный и коленчатый валы. Бывает чугунным или алюминиевым. Отличается наличием ребер жесткости для повышения прочности. По бокам БЦ находятся места для установки дополнительных устройств.
- ГБЦ. Смонтирована на БЦ и закрывает его. Имеет отверстия для фиксации клапанов, коллекторов впуска и выпуска, распределительного вала и иных узлов силового агрегата. В нижней части головки установлена прокладка, обеспечивающая герметичный стык с БЦ. В ней имеются дырки для болтов, соединяющих главный блок и головку. В моторах послушного охлаждения ГБЦ может иметь реберную фактуру.
- Поддон картера. Закрывает двигатель с нижней стороны и выступает в роли емкости для смазки. Бывает стальным или алюминиевым (применяется сплав). Во внутренней части могут изготавливаться перегородки или лотки, которые предотвращают движение или взбалтывание смазки при перемещении транспортного средства по плохим дорогам.
 Вверху имеет крепления для фиксации к блок-картеру, а внизу — бобышку с резьбой и магнитной пробкой. Ее назначение состоит в удалении продуктов износа и продлении срока службы мотора.
Вверху имеет крепления для фиксации к блок-картеру, а внизу — бобышку с резьбой и магнитной пробкой. Ее назначение состоит в удалении продуктов износа и продлении срока службы мотора. - Цилиндры. Представляют собой полости, в которых перемещаются поршни и обеспечивают работу мотора. Изготавливаются из чугуна, а внутренняя часть закаляется и обрабатывается до состояния «зеркала». Вверху цилиндры получают набольшую нагрузку, ведь именно здесь происходит воспламенение с резким увеличением давления и нагрева. Также стенка цилиндра вынуждена выдерживать ударные нагрузки.
- Гильзы. Устанавливаются в БЦ в виде фиксированного или съемного элемента. Первый вариант имеет цилиндрическую форму с необходимыми углублениями по диаметру и высоте. Съемные похожи по внешнему виду, но закрыты по бокам. Устанавливаются на специальном месте в БЦ. Снизу для обеспечения плотности применяются специальные кольца. Внутренняя часть гильзы обработана до блеска и имеет зеркальный внешний вид.
 Предусмотрено два или три «окна» для 2-х и 3-тактных моторов соответственно. В последнем случае отверстия используются для впуска, выхода и движения отработанных продуктов.
Предусмотрено два или три «окна» для 2-х и 3-тактных моторов соответственно. В последнем случае отверстия используются для впуска, выхода и движения отработанных продуктов. - Коренные подшипники.Выполняются в виде вкладышей, изготовленных с применением ленты из стали. Их толщина может отличаться в зависимости от конструкции и типа мотора. Для дизельных силовых агрегатов это 3-6 мм, а для бензиновых — 1.9-2.8 м. Вкладыши делаются из алюминия или бронзы с добавлением свинца.
Принцип работы кривошипно-шатунного механизма
Рассмотренные выше узлы гарантируют работу кривошипно-шатунного механизма. Алгоритм действий имеет следующий вид:
- Включение зажигание и вращение стартера.
- Раскручиванием маховика, обеспечивающего начало вращения коленвала и поршней.
- Подача подготовленной смеси в камеру сгорания (над цилиндром).
- Воспламенение горючего в момент, когда поршень поднимается к наиболее высокой точке.

- Резкое опускание вниз цилиндра под действием возникшей силы.
- Давление на шатун, который соединен одной стороной с коленчатым валом, а другой — с поршнем.
- Передача импульса на вал, который проворачивается под действием усилия.
По рассмотренному выше принципу работают и другие цилиндры, что обеспечивает стабильное вращение коленчатого вала и передачу движения на колеса. Задача маховика состоит обеспечении требуемого импульса в момент, когда поршень находится в «мертвой» точке. Дальнейший процесс происходит по замкнутому циклу.
Основные неисправности
Несмотря на надежность КШМ двигателя, его элементы могут выходить из строя. Причина —высокая температура и другие негативные факторы, способные ускорить поломку. В таких случаях остальные узлы также находятся под угрозой повреждения, что требует своевременного выявления и устранения неисправностей. Рассмотрим основные поломки, с которыми приходится сталкиваться в процессе эксплуатации.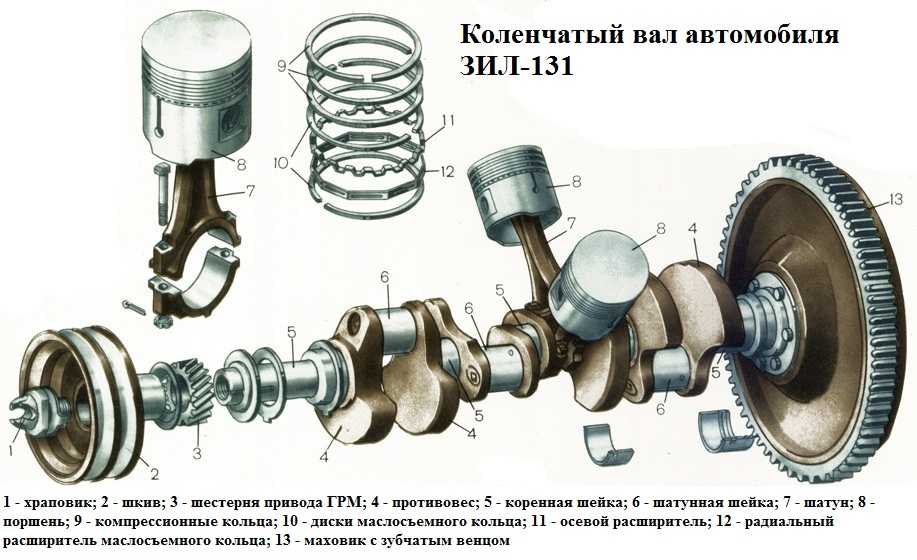
- Уменьшение мощности. Характерная неисправность КШМ — ухудшение динамики, которое часто свидетельствует о залегании колец на поршнях. В результате в камеру сгорания просачивается масло, а отработавшие газы — в картер. Такая ситуация ведет к снижению мощности, что сразу чувствуется в процессе движения.
- Если ничего не предпринимать, ситуация может усугубиться, вплоть до необходимости капремонта. Для проверки нужно достать свечи и поочередно проверить компрессию в каждом из цилиндров. При ее снижении ниже допустимой нормы придется разбирать мотор и делать ремонт.
- Появление стука. Для автовладельцев стук в двигателе — самая страшная неисправность, которая может свидетельствовать о серьезных проблемах. Для определения причины необходимо снимать ГБЦ и разбирать остальные элементы. Поврежденная деталь требует замены. Причиной неисправности может быть несвоевременное техническое обслуживание. Чаще всего это игнорирование требований по замене масла и фильтра.
 Появление стука может свидетельствовать о повреждении подшипников, которые боятся дефицита смазки.
Появление стука может свидетельствовать о повреждении подшипников, которые боятся дефицита смазки. - Появление нагара. Распространенная проблема КШМ — накопление нагара на свечах, клапанах и поршнях. Указанные признаки свидетельствуют о неисправностях мотора и требуют обращения на СТО. Если ничего не предпринять, двигатель начинает перегреваться из-за ухудшения отвода тепла. Результатом перегрева могут быть более серьезные поломки.
- Прожорливость смазки. Увеличение прожорливости масла свидетельствует о залегании поршневых колец или иных проблемах с ЦПГ. Масло сгорает с горючим, а из выхлопной трубы выходит дым черного цвета. Из-за попадания в рабочую камеру смазки возрастает и температура горения, что негативно влияет на ресурс силового агрегата. Для решения проблемы может требоваться очистка без снятия с мотора, но чаще всего необходима разборка и дефектовка силового агрегата.
- Выхлоп белого цвета. Появление такого дыма из выхлопной трубы свидетельствует о повреждении прокладки ГБЦ или дефекте в системе охлаждения.
 Для решения вопроса необходимо сразу заменить неисправную деталь. Важно учесть, что появление протечки может привести к гидроудару и необходимости капитального ремонта мотора.
Для решения вопроса необходимо сразу заменить неисправную деталь. Важно учесть, что появление протечки может привести к гидроудару и необходимости капитального ремонта мотора.
Причины выхода из строя деталей кривошипно-шатунного механизма различны. В большинстве случаев это касается применения низкокачественных ГСМ и несвоевременной замены, заливки плохого бензина или повреждения системы зажигания.
Нельзя исключать и такие факторы, как низкое качество масляных фильтров, повышенные нагрузки на мотор и сбои в работе системы охлаждения. Результатом может быть износ коренных / шатунных подшипников, поршней, цилиндров или поршневых пальцев. До диагностики и устранения неисправности поездки на ТС запрещены.
Заключение
КШМ — группа ключевых узлов двигателя, обеспечивающих движение транспортного средства. Элементы механизма взаимодействуют друг с другом для преобразования энергии, обеспечения вращения коленчатого вала и колес.
Неисправности любого из узлов почти сразу проявляют себя стуком, нестандартным цветом выхлопа и другими признаками. В таком случае нужно сразу обращаться на станцию техобслуживания для выявления и устранения проблемы.
Кривошипно-шатунный механизм, 3D анимация
Поиск запроса «кривошипно-шатунный механизм, устройство и работа» по информационным материалам и форуму
Назначение кривошипно-шатунного механизма. Техобслуживание и мелкий ремонт автомобиля своими руками.
Назначение кривошипно-шатунного механизма. Техобслуживание и мелкий ремонт автомобиля своими руками.ВикиЧтение
Техобслуживание и мелкий ремонт автомобиля своими руками.
Гладкий Алексей Анатольевич
Содержание
Назначение кривошипно-шатунного механизма
Кривошипно-шатунный механизм (сокращенно КШМ) обеспечивает преобразование поступательно-вращательного движения поршня внутри цилиндра во вращательное движение коленчатого вала двигателя. У стандартного четырехцилиндрового мотора КШМ включает в себя блок цилиндров с картером, головку блока цилиндров, поддон картера двигателя, поршни в комплекте с поршневыми кольцами и пальцами, шатуны (на которых крепятся поршни), коленчатый вал и маховик.
Главная часть КШМ (да и двигателя вообще) — это блок цилиндров. Он состоит не только из цилиндров (рис. 2.7) и деталей поршневой группы, но и целого ряда прочих элементов: каналов, заглушек, подшипников, сверлений. Коленвал, который установлен на специальных подшипниках, вращается именно в блоке цилиндров.
Внизу блока цилиндров расположен картер. Внутри блока цилиндров во время работы двигателя постоянно циркулирует охлаждающая жидкость: летом это может быть простая вода, в холодный же сезон необходимо использовать тосол или антифриз. Также внутри блока цилиндров проходят масляные каналы, которые относятся к системе смазки двигателя.
Также внутри блока цилиндров проходят масляные каналы, которые относятся к системе смазки двигателя.
Примечание.
Немалая доля навесного моторного оборудования монтируется именно на блоке цилиндров, и при включенном двигателе работает с ним как единое целое.
Что касается назначения и принципа работы поршня и иных деталей поршневой группы, то об этом мы уже говорили выше. Напомним лишь, что под силой мощного давления, которое образуется в цилиндре после сгорания рабочей смеси, поршень движется вниз и передает свое движение через шатун (на котором он установлен) на коленчатый вал, образуя тот самый крутящий момент, с помощью которого автомобиль и приводится в движение.
Знайте, что двигатель внутреннего сгорания работает в довольно жестком режиме. На холостых оборотах (т. е. когда мотор работает, но машина стоит на месте, находясь на нейтральной передаче) коленчатый вал вращается со скоростью 600–900 оборотов в минуту (или около 10–16 оборотов в секунду). Во время движения со средней скоростью мотор работает еще интенсивнее, и коленчатый вал крутится со скоростью от 2000 до 3000 оборотов в минуту. А у современных спортивных авто скорость вращения коленвала может зашкаливать за 200 оборотов в секунду (10 000 — 13 000 оборотов в минуту).
Во время движения со средней скоростью мотор работает еще интенсивнее, и коленчатый вал крутится со скоростью от 2000 до 3000 оборотов в минуту. А у современных спортивных авто скорость вращения коленвала может зашкаливать за 200 оборотов в секунду (10 000 — 13 000 оборотов в минуту).
Следовательно, поршни в цилиндрах перемещаются вверх-вниз очень быстро. Ранее мы уже отмечали, что за один полный оборот коленвала поршень успевает дважды пройти расстояние между ВМТ и НМТ. Так вот: эти движения он выполняет буквально за какие-то доли секунды. Если к этому добавить мощное давление, а также высокую температуру в каждом цилиндре, то условия работы двигателя внутреннего сгорания можно назвать экстремальными.
Данный текст является ознакомительным фрагментом.
8.1. Назначение и виды ремонта
8. 1. Назначение и виды ремонта
Демонтажем называются операции разборки машины или оборудования на сборочные единицы, узлы и детали. При этом производится разборка разъемных, а в ряде случаев и неразъемных соединений.Ремонтом машины называется восстановление
1. Назначение и виды ремонта
Демонтажем называются операции разборки машины или оборудования на сборочные единицы, узлы и детали. При этом производится разборка разъемных, а в ряде случаев и неразъемных соединений.Ремонтом машины называется восстановление
1. Виды, назначение и способы изготовления опалубки и инвентарных лесов
1. Виды, назначение и способы изготовления опалубки и инвентарных лесов При строительстве зданий и сооружений из монолитного бетона и железобетона применяют опалубку. Опалубка представляет собой формы, в которые укладывают арматуру и бетонную смесь либо одну бетонную
Глава 1 НАЗНАЧЕНИЕ И ВИДЫ СТЕКОЛЬНЫХ РАБОТ
Глава 1
НАЗНАЧЕНИЕ И ВИДЫ СТЕКОЛЬНЫХ РАБОТ
В помещениях с постоянным пребыванием людей, в том числе в жилых, общественных и производственных зданиях, должно быть организовано хорошее естественное освещение. Естественное освещение бывает боковое, верхнее,
Естественное освещение бывает боковое, верхнее,
Назначение и устройство ходовой части автомобиля
Назначение и устройство ходовой части автомобиля Главное назначение ходовой части автомобиля состоит в том, чтобы связать колеса с его кузовом, погашая возникающие в процессе езды колебания и обеспечивая плавность и мягкость хода, а значит — и комфортность
Назначение и устройство колес
Назначение и устройство колес Колесо — это устройство, на которое поступает крутящий момент от двигателя автомобиля. Оно обеспечивает движение автомобиля за счет этого крутящего момента, а также за счет сцепления поверхности колеса с дорожным покрытием. Кроме этого,
Устройство и назначение коробки переключения передач
Устройство и назначение коробки переключения передач Коробка переключения передач (сокращенно КПП) предназначена для изменения крутящего момента по величине и направлению и передачи его от сцепления (с механизмом сцепления мы познакомимся в следующем разделе) к
Стенды.
 Назначение и устройство
Назначение и устройствоСтенды. Назначение и устройство Ремонт безрамных кузовов требует применения особых методов ремонта и особого оборудования. Основание не отсоединяется от остова кузова, как у рамных автомобилей. Для такой конструкции требуется жесткая база, служащая для отсчета при
ДЕТАЛИ ОТДЕЛКИ, ИХ НАЗНАЧЕНИЕ И ВЫПОЛНЕНИЕ
ДЕТАЛИ ОТДЕЛКИ, ИХ НАЗНАЧЕНИЕ И ВЫПОЛНЕНИЕ Наличники (рис. 211, а) не только украшают дом снаружи, но и закрывают щель между стеной и оконной коробкой. В дополнение к рисунку на форзаце приведены различные типы наличников, встречающихся в Московской, Тульской, Смоленской,
ФУНКЦИОНАЛЬНОЕ НАЗНАЧЕНИЕ
ФУНКЦИОНАЛЬНОЕ НАЗНАЧЕНИЕ
Половое покрытие используется везде: дома, на даче, в офисном центре, поэтому к нему предъявляется целый ряд самых разнообразных требований. Выбирая покрытие для пола, следует обратить внимание на такие его характеристики:? долговечность и
Выбирая покрытие для пола, следует обратить внимание на такие его характеристики:? долговечность и
Регулировка клапанного механизма
Регулировка клапанного механизма Как известно, клапаны являются частью газораспределительного механизма и предназначены для впуска рабочей смеси в камеру сгорания и выпуска из нее отработанных газов. Поэтому состояние клапанного механизма (рис. 4.1) самым
Назначение замка
Назначение замка «Входной замок», «замок для классной комнаты» и «замок для вестибюля» – все эти названия отражают назначение замка. Например, у замка для классной комнаты внутренняя кнопка всегда находится в нефиксированном положении, чтобы обеспечить максимально
Устройство и функция коленчатого вала · Technipedia · Motorservice
Настройки
Вернуться к поиску
Информация о продукте
Как работает коленчатый вал? Как устроен коленчатый вал? Что такое сопротивление кручению? Из какого материала делают коленчатые валы и какими свойствами они должны обладать? Эта статья дает вам ответы.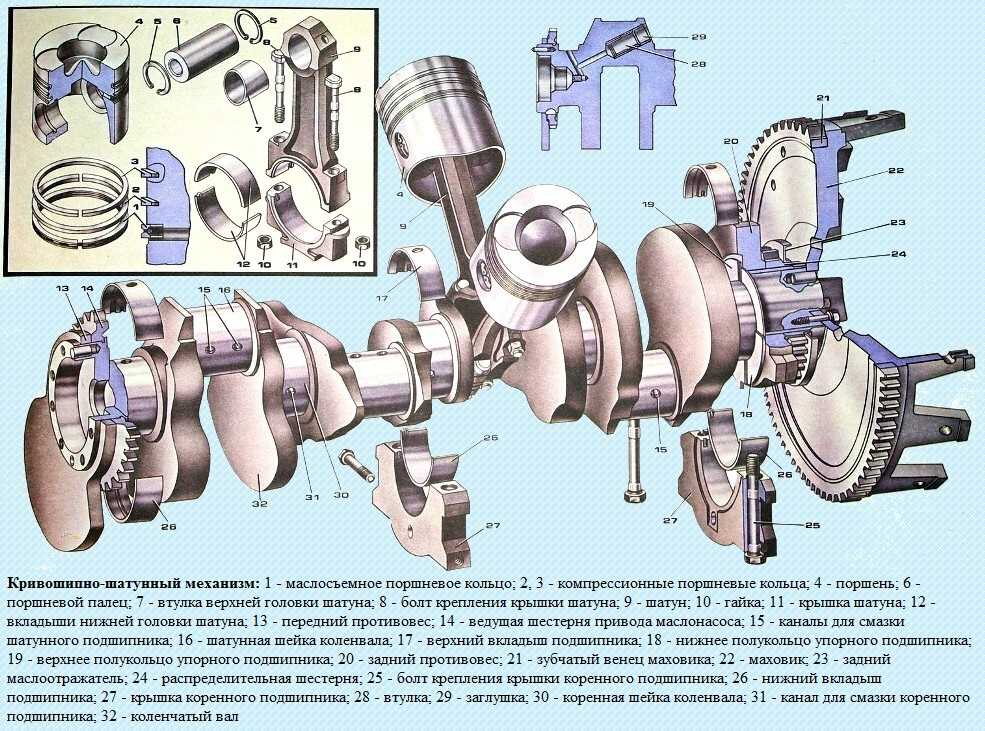
Функция коленчатого вала
Коленчатый вал преобразует силу, возникающую при сгорании в двигателе, во вращательное движение. Линейное движение поршней вверх и вниз преобразуется в крутящий момент шатуном и затем передается на маховик.
Строительство и недвижимость
Чтобы выдерживать большие нагрузки, коленчатые валы имеют закаленную поверхность и прочный сердечник. Поэтому коленчатые валы часто изготавливают из кованой стали. Непрерывный слой зерна позволяет достичь высокого сопротивления кручению. Позиции подшипников на коленчатом валу закалены, что делает их более устойчивыми к износу.
Ключевые слова :
подшипник распределительного вала , шатунный подшипникГруппа товаров :
Кривошипный механизмвидео
Структура и функция коленчатого вала (3D-анимация)
Группы продуктов на ms-motorservice.
 com
com Это также может вас заинтересовать
Информация по диагностике
Повреждение коленчатых валов
причины и их предотвращение
Каковы наиболее частые причины поломки коленчатого вала? Как правильно установить коленчатый вал, чтобы не повредить его? Здесь вы можете узнать, как осуществляется установка пошагово…
Только для технического персонала. Все содержимое, включая изображения и диаграммы, может быть изменено. Для назначения и замены обратитесь к текущим каталогам или системам, основанным на TecAlliance.
Использование файлов cookie и защита данных
Motorservice Group использует файлы cookie, сохраненные на вашем устройстве, для оптимизации и постоянного улучшения своих веб-сайтов, а также для статистических целей.
Дополнительную информацию об использовании нами файлов cookie можно найти здесь, а также информацию о нашей публикации и уведомление о защите данных.
Нажав «ОК», вы подтверждаете, что приняли к сведению информацию о файлах cookie, заявлении о защите данных и деталях публикации. Вы также можете в любое время изменить настройки файлов cookie для этого веб-сайта.
Настройки конфиденциальности
Мы придаем большое значение прозрачной информации, касающейся всех аспектов защиты данных. Наш веб-сайт содержит подробную информацию о настройках, которые вы можете выбрать, и о том, какое влияние оказывают эти настройки. Вы можете изменить выбранные настройки в любое время. Независимо от того, какой выбор вы выберете, мы не будем делать никаких выводов о вас как о личности (за исключением случаев, когда вы явно указали свои данные). Для получения информации об удалении файлов cookie обратитесь к функции справки в вашем браузере. Вы можете узнать больше в заявлении о защите данных.
Измените настройки конфиденциальности, нажав на соответствующие кнопки
- Необходимый
- Удобство
- Статистика
Необходимый
Файлы cookie, необходимые для системы, обеспечивают правильную работу веб-сайта. Без этих файлов cookie могут возникнуть сбои или сообщения об ошибках.
Без этих файлов cookie могут возникнуть сбои или сообщения об ошибках.
Этот веб-сайт будет:
- Сохранение файлов cookie, необходимых системе
- Сохранение настроек, которые вы делаете на этом веб-сайте
Этот сайт никогда не будет делать следующее без вашего согласия:
- Сохраните ваши настройки, такие как выбор языка или баннер cookie, чтобы вам не пришлось повторять их в будущем.
- Анонимно оценивайте посещения и делайте выводы, которые помогут нам оптимизировать наш веб-сайт.
- Сделать выводы о вас как о личности (за исключением случаев, когда вы явно указали свои данные, например, в контактных формах)
Удобство
Эти файлы cookie упрощают использование веб-сайта и сохраняют настройки, например, чтобы вам не приходилось повторять их каждый раз, когда вы посещаете сайт.
Этот веб-сайт будет:
- Сохранение файлов cookie, необходимых системе
- Сохранение ваших настроек, таких как выбор языка или баннер файлов cookie, чтобы вам не пришлось повторять их в будущем.

Этот сайт никогда не будет делать следующее без вашего согласия:
- Оценивайте посещения анонимно и делайте выводы, которые помогут нам оптимизировать наш веб-сайт.
- Сделать выводы о вас как о личности (за исключением случаев, когда вы явно указали свои данные, например, в контактных формах)
Конечно, мы всегда будем соблюдать настройку «не отслеживать» (DNT) в вашем браузере. В этом случае файлы cookie для отслеживания не устанавливаются и функции отслеживания не загружаются.
Кривошип (механизм) | Tractor & Construction Plant Wiki
Кривошип представляет собой рычаг, прикрепленный под прямым углом к вращающемуся валу, с помощью которого возвратно-поступательное движение передается валу или принимается от него. Он используется для преобразования кругового движения в возвратно-поступательное или иногда возвратно-поступательное движение в круговое. Рычаг может представлять собой изогнутую часть вала или прикрепленный к нему отдельный рычаг. К концу кривошипа шарниром прикреплен стержень, обычно называемый шатуном. Конец стержня, прикрепленный к кривошипу, движется круговым движением, в то время как другой конец обычно вынужден двигаться линейным скользящим движением внутрь и наружу.
Этот термин часто относится к рукоятке с приводом от человека, которая используется для ручного поворота оси, например, в шатуне велосипеда или в скобе и дрели. В этом случае рука или нога человека служит шатуном, прикладывающим возвратно-поступательную силу к кривошипу. Часто имеется штанга, перпендикулярная другому концу руки, часто со свободно вращающейся ручкой для удержания в руке или в случае работы ногой (обычно второй рукой для другой ноги), с свободно вращающаяся педаль.
Содержание
- 1 Примеры
- 1.1 Рукоятки с ручным приводом
- 1.2 Кривошипные рукоятки с ножным приводом
- 1.3 Двигатели
- 2 Механика
- 3 История
- 3.1 Западный мир
- 3.
 1.1 Классическая древность
1.1 Классическая древность - 3.1.2 Средневековье
- 3.1.3 Ренессанс
- 3.
- 3.2 Дальний Восток
- 3.3 Ближний Восток
- 3,4 20 век
- 3.1 Западный мир
- 4 Коленчатая ось
- 5 См. также
- 6 Каталожные номера
- 6.1 Библиография
- 7 Внешние ссылки
Примеры
Рукоятка
Ручная рукоятка точилки для карандашей
Знакомые примеры включают:
Ручные рукоятки
- Механическая точилка для карандашей
- Рыболовная катушка и другие катушки для кабелей, проводов, канатов и т. д.
- Окно автомобиля с ручным управлением
- Набор рукояток, который приводит в движение трикке через рукоятки.
Шатуны с ножным приводом
- Кривошип, приводящий велосипед в движение с помощью педалей.
- Швейная машина с педалью
Двигатели
Почти все поршневые двигатели используют кривошипы для преобразования возвратно-поступательного движения поршней во вращательное движение. Шатуны встроены в коленчатый вал.
Шатуны встроены в коленчатый вал.
Механика
Смещение конца шатуна примерно пропорционально косинусу угла поворота кривошипа при измерении от верхней мертвой точки (ВМТ). Таким образом, возвратно-поступательное движение, создаваемое постоянно вращающимся кривошипом и шатуном, приблизительно представляет собой простое гармоническое движение:
где x — расстояние от конца шатуна до оси кривошипа, l — длина шатуна, r — длина кривошипа, α угол поворота коленчатого вала, измеренный от верхней мертвой точки (ВМТ). Технически возвратно-поступательное движение шатуна немного отличается от синусоидального из-за изменения угла шатуна во время цикла.
Механическое преимущество кривошипа, соотношение между усилием на шатуне и крутящим моментом на валу, меняется на протяжении цикла кривошипа. Соотношение между ними примерно такое:
где крутящий момент и F сила на шатуне. Для данной силы на кривошипе крутящий момент максимален при углах кривошипа α = 90° или 270° от ВМТ. Когда кривошип приводится в движение шатуном, возникает проблема, когда кривошип находится в верхней мертвой точке (0°) или нижней мертвой точке (180°). В эти моменты цикла кривошипа сила, действующая на шатун, не вызывает крутящего момента на кривошипе. Следовательно, если кривошип неподвижен и находится в одной из этих двух точек, он не может быть приведен в движение шатуном. По этой причине в паровозах, колеса которых приводятся в движение кривошипами, два шатуна крепятся к колесам в точках 9.0 ° друг от друга, так что независимо от положения колес при запуске двигателя по крайней мере один шатун сможет создать крутящий момент для запуска поезда.
Для данной силы на кривошипе крутящий момент максимален при углах кривошипа α = 90° или 270° от ВМТ. Когда кривошип приводится в движение шатуном, возникает проблема, когда кривошип находится в верхней мертвой точке (0°) или нижней мертвой точке (180°). В эти моменты цикла кривошипа сила, действующая на шатун, не вызывает крутящего момента на кривошипе. Следовательно, если кривошип неподвижен и находится в одной из этих двух точек, он не может быть приведен в движение шатуном. По этой причине в паровозах, колеса которых приводятся в движение кривошипами, два шатуна крепятся к колесам в точках 9.0 ° друг от друга, так что независимо от положения колес при запуске двигателя по крайней мере один шатун сможет создать крутящий момент для запуска поезда.
ИСТОРИЯ
Western World
Классическая древность
- См. Также: римские технологии и список римских водяных мельниц
Римская ручка с августа Раурика, данный 2 -й век г. эксцентрично установленная рукоятка вращающейся ручной мельницы, появившейся в 5 веке до нашей эры в кельтиберской Испании и в конечном итоге распространившейся по Римской империи, представляет собой кривошип. [2] [3] [4] Римский железный коленчатый вал неизвестного назначения, датируемый 2 веком нашей эры, был раскопан в Августе Раурике, Швейцария. На одном конце куска длиной 82,5 см установлена бронзовая ручка длиной 15 см, другая ручка утеряна. [5] [1]
эксцентрично установленная рукоятка вращающейся ручной мельницы, появившейся в 5 веке до нашей эры в кельтиберской Испании и в конечном итоге распространившейся по Римской империи, представляет собой кривошип. [2] [3] [4] Римский железный коленчатый вал неизвестного назначения, датируемый 2 веком нашей эры, был раскопан в Августе Раурике, Швейцария. На одном конце куска длиной 82,5 см установлена бронзовая ручка длиной 15 см, другая ручка утеряна. [5] [1]
A ок. Настоящая железная рукоятка длиной 40 см вместе с парой разбитых жерновов диаметром 50–65 см и различными железными изделиями была раскопана в Ашхайме, недалеко от Мюнхена. Римская мельница с кривошипным приводом датируется концом 2 века нашей эры. [6] Часто цитируемая современная реконструкция ковшового цепного насоса с приводом от ручных маховиков кораблей Неми была отвергнута как «археологическая фантазия». [7]
Римская лесопилка Иераполиса 3 века нашей эры, самая ранняя известная машина, в которой кривошип сочетается с шатуном. [8]
[8]
Самые ранние в мире свидетельства того, что кривошип в сочетании с шатуном в машине, обнаружены в позднеримской лесопилке Иераполиса с 3-го века нашей эры и двух римских каменных лесопилках в Герасе, Римская Сирия, и Эфес, Малая Азия (оба 6 век нашей эры). [8] На фронтоне мельницы Иераполиса показано водяное колесо, приводимое в движение мельничной дорожкой, приводящее в действие через зубчатую передачу две рамные пилы, которые разрезают прямоугольные блоки с помощью каких-то шатунов и, по механической необходимости, кривошипов. . Сопроводительная надпись на греческом языке. [9]
Кривошипно-шатунные механизмы двух других археологически засвидетельствованных лесопилок работали без зубчатой передачи. [10] [11] В древней литературе мы находим упоминание о работах поэта Авзония конца 4-го века по мрамору недалеко от Трира, нынешняя Германия, с водяными пилами по мрамору; [8] Примерно в то же время эти типы мельниц, по-видимому, также указаны христианским святым Григорием Нисским из Анатолии, демонстрирующим разнообразное использование гидроэнергии во многих частях Римской империи [12] Три находит отодвинуть дату изобретения кривошипа и шатуна на целое тысячелетие назад; [8] впервые все основные компоненты гораздо более поздней паровой машины были собраны одной технологической культурой:
С кривошипно-шатунной системой, все элементы для построения паровой машины (изобретен в 1712 г.
) — эолипил Героя (производящий силу пара), цилиндр и поршень (в металлических силовых насосах), обратные клапаны (в водяных насосы), зубчатые передачи (в водяных мельницах и часах) — были известны еще во времена Римской империи. [13]
Средневековье
- показан в каролингской рукописи Утрехтской псалтири ; рисунок пером около 830 года восходит к позднему античному оригиналу. [15] Музыкальный трактат, приписываемый аббату Одо из Клюни (ок. 878−879 гг.).42) описывает ладовый струнный инструмент, звук которого звучал с помощью смоляного колеса, вращаемого рукояткой; позже это устройство появляется в двух иллюминированных рукописях XII века. [14] Есть также два изображения Фортуны, крутящей колесо судьбы из этого и следующего веков. [14]
Использование кривошипных рукояток в трепанационных сверлах было описано в издании Dictionnaire des Antiquités Grecques et Romaines 1887 г. за счет испанского хирурга-мусульманина Абу аль-Касима аль-Захрави; однако существование такого устройства не может быть подтверждено оригинальным освещением, и поэтому его следует не принимать во внимание.
 [16] Монах-бенедиктинец Феофил Пресвитер (ок. 1070–1125) описал кривошипные рукоятки, «используемые при точении литейных стержней». [17]
[16] Монах-бенедиктинец Феофил Пресвитер (ок. 1070–1125) описал кривошипные рукоятки, «используемые при точении литейных стержней». [17] Итальянский врач Гвидо да Виджевано (ок. 1280–1349 гг.), планируя новый крестовый поход, нарисовал гребную лодку и военные повозки, которые приводились в движение составными кривошипами и зубчатыми колесами, вращаемыми вручную (в центре изображение). [18] В Luttrell Psalter , датируемом примерно 1340 годом, описывается точильный камень, который вращался с помощью двух кривошипов, по одному на каждом конце его оси; зубчатая ручная мельница с одним или двумя кривошипами появилась позже, в 15 веке; [19]
Средневековые подъемные краны иногда приводились в движение рукоятками, но чаще лебедками. [20]
Ренессанс
- Европе к началу 15 века, часто можно увидеть в работах таких, как немецкий военный инженер Конрад Кайзер. [19] Устройства, изображенные в Bellifortis компании Kyeser, включают кривошипные брашпили (вместо спицованных колес) для натягивания осадных арбалетов, кривошипную цепь ковшей для подъема воды и рукоятки, прикрепленные к колесу колоколов.
 [19] Компания Kieser также оснастила винты Архимеда для подъема воды кривошипной рукояткой — новшество, которое впоследствии заменило древнюю практику работы с трубой путем наступания. [21] Самое раннее свидетельство оснащения колодезного подъемника кривошипами находится на миниатюре ок. 1425 в немецком Hausbuch Фонда Менделя . [22]
[19] Компания Kieser также оснастила винты Архимеда для подъема воды кривошипной рукояткой — новшество, которое впоследствии заменило древнюю практику работы с трубой путем наступания. [21] Самое раннее свидетельство оснащения колодезного подъемника кривошипами находится на миниатюре ок. 1425 в немецком Hausbuch Фонда Менделя . [22] Немецкий арбалетчик взводит свое оружие с помощью кривошипно-реечного устройства (ок. 1493 г.)
Первые изображения составного кривошипа в скобе плотника появляются между 1420 и 1430 годами в различных североевропейских произведениях искусства. [23] Быстрое внедрение составного кривошипа можно проследить в работах Анонима гуситских войн, неизвестного немецкого инженера, пишущего о состоянии военной техники того времени: во-первых, шатун, прикладной к кривошипам, снова появились, во-вторых, кривошипы с двойным составом также стали оснащаться шатунами и, в-третьих, для этих кривошипов использовался маховик, чтобы вывести их из «мертвой точки».

На одном из рисунков Анонимуса гуситских войн изображена лодка с парой гребных колес на каждом конце, вращаемых людьми, управляющими сложными рукоятками (см. выше). Эта концепция была значительно улучшена итальянцем Роберто Вальтурио в 1463 году, который изобрел лодку с пятью комплектами, в которой все параллельные кривошипы соединены с единым источником энергии одним шатуном. Эту идею также подхватил его соотечественник Франческо ди Джорджио. . [24]
Водоподъемный насос с кривошипно-шатунным механизмом (Георг Андреас Бёклер, 1661 г.)
В Италии эпохи Возрождения самые ранние свидетельства существования сложной кривошипной рукоятки и шатуна можно найти в альбомах Такколы, но механически это устройство до сих пор понимается неправильно. [25] Четкое представление о движении кривошипа демонстрирует немного позднее Пизанелло, нарисовавший привод с поршневым насосом. водяным колесом и приводился в действие двумя простыми кривошипами и двумя шатунами.
 [25]
[25] В 15 веке также были введены кривошипно-реечные устройства, называемые журавлями, которые устанавливались на приклад арбалета как средство приложения еще большей силы при натягивании стрелкового оружия (см. справа). . [26] В текстильной промышленности внедрены кривошипные катушки для намотки мотков пряжи. [19]
Около 1480 года раннесредневековый вращающийся точильный камень был усовершенствован с помощью педали и кривошипного механизма. Кривошипы, установленные на тележках, впервые появляются на немецкой гравюре 1589 года. 9Только 0209 Разнообразные и искусственные машины из 1588 года изображает восемнадцать экземпляров, число которых увеличивается в Theatrum Machinarum Novum Георга Андреаса Бёклера до 45 различных машин, что составляет одну треть от общего числа. [28]
Дальний Восток
Тибетец, работающий на печи (1938 г.). Перпендикулярная рукоятка таких вращающихся ручных мельниц работает как рукоятка.
 [3] [4]
[3] [4] Самая ранняя настоящая кривошипная рукоятка в ханьском Китае встречается, как изображают модели гробниц из глазурованной глиняной посуды эпохи Хань, в сельскохозяйственном веялке, [29] , датированный не позднее 200 г. н.э. [30] После этого рукоятка использовалась в Китае для наматывания шелка и конопли, в водяном просеителе для муки, в металлургических мехах с гидравлическим приводом и в лебедке для колодца. [31] Однако потенциал кривошипа по преобразованию кругового движения в возвратно-поступательное, похоже, так и не был полностью реализован в Китае, и кривошип, как правило, отсутствовал в таких машинах до начала 20-го века. [32]
Ближний Восток
В то время как американо-американский историк техники Линн Уайт не смогла найти «твердых свидетельств даже простейшего применения рукоятки до книги аль-Джазари 1206 г. н.э.», [19] рукоятка появляется согласно Бистон в середине 9-го века в нескольких гидравлических устройствах, описанных братьями Бану Муса в их Книге гениальных устройств .
 [33] Эти устройства, однако, совершали лишь частичные обороты и не могли передавать большую мощность, [34] , хотя для преобразования его в коленчатый вал потребовалась бы лишь небольшая модификация. [35]
[33] Эти устройства, однако, совершали лишь частичные обороты и не могли передавать большую мощность, [34] , хотя для преобразования его в коленчатый вал потребовалась бы лишь небольшая модификация. [35] Аль-Джазари (1136–1206) описал кривошипно-шатунную систему во вращающейся машине двух своих водоподъемных машин. [36] Его двухцилиндровый насос включал коленчатый вал, [37] , но устройство было излишне сложным, что указывало на то, что он все еще не полностью понимал концепцию преобразования энергии. [38] После аль-Джазари чудаки в исламской технологии не прослеживаются до начала 15-го века копии 9-го века.0209 Механика древнегреческого инженера Героя Александрийского. [16]
20th Century
В начале 20-го века на некоторых машинах использовались кривошипы; например, почти все фонографы до 1930-х годов приводились в действие заводными двигателями с заводными рукоятками.
 Двигатели внутреннего сгорания автомобилей обычно запускались с помощью рукоятки (известной как пусковые ручки в Великобритании), прежде чем электрические стартеры стали широко использоваться.
Двигатели внутреннего сгорания автомобилей обычно запускались с помощью рукоятки (известной как пусковые ручки в Великобритании), прежде чем электрические стартеры стали широко использоваться.1918 Руководство по эксплуатации Reo описывает , как проворачивать автомобиль вручную:
- Первое: Убедитесь, что рычаг переключения передач находится в нейтральном положении.
- Секунда: педаль сцепления разблокирована, а сцепление включено. Педаль тормоза максимально выдвинута вперед, тормозя заднее колесо.
- Третье: Обратите внимание на рычаг управления искрой, который представляет собой короткий рычаг, расположенный в верхней части рулевого колеса с правой стороны. находится максимально назад к водителю, а длинный рычаг наверху рулевой колонки, управляющий карбюратором, сдвинут вперед примерно на один дюйм из своего крайнего положения.
- Четвертое: Поверните ключ зажигания в положение с меткой «В» или «М»
- Пятое: Установите регулятор карбюратора на рулевой колонке в положение с пометкой «СТАРТ».
 Убедитесь, что в карбюраторе есть бензин. Проверьте это, нажимая на маленький штифт, выступающий из передней части чаши, пока карбюратор не заполнится. Если он не заливается, это показывает, что топливо не подается в карбюратор должным образом, и нельзя ожидать, что двигатель запустится. См. инструкции на стр. 56 для заполнения вакуумного бака.
Убедитесь, что в карбюраторе есть бензин. Проверьте это, нажимая на маленький штифт, выступающий из передней части чаши, пока карбюратор не заполнится. Если он не заливается, это показывает, что топливо не подается в карбюратор должным образом, и нельзя ожидать, что двигатель запустится. См. инструкции на стр. 56 для заполнения вакуумного бака. - Шестое: Убедившись, что в карбюраторе есть запас топлива, возьмитесь за рукоятку пусковой рукоятки, надавите на нее до упора, чтобы зацепить храповик со штифтом коленчатого вала, и переверните двигатель, быстро потянув вверх. Никогда не нажимайте вниз, потому что, если по какой-либо причине двигатель отскочит назад, это может подвергнуть опасности оператора.
Коленчатая ось
Коленчатая ось представляет собой коленчатый вал, который также служит в качестве оси. Используется на паровозах с внутренними цилиндрами.
См. также
- Лебедка
- Уравнения движения поршня
- Ничего измельчителя
- Солнечная и планетарная шестерня
Каталожные номера
- ↑ 1.
 0 1.1 Schiöler 2009, стр. 113f.
0 1.1 Schiöler 2009, стр. 113f. - ↑ Дата: Frankel 2003, стр. 17–19.
- ↑ 3.0 3.1 Ritti, Grewe & Kessener 2007, с. 159
- ↑ 4,0 4,1 Лукас 2005, с. 5, фн. 9
- ↑ Лаур-Беларт 1988, с. 51–52, 56, рис. 42
- ↑ Volpert 1997, стр. 195, 199.
- ↑ White, Jr. 1962, стр. 105f.; Олесон 1984, стр. 230f.
- ↑ 8,0 8,1 8,2 8,3 Ритти, Греве и Кессенер 2007, с. 161:
Из-за находок в Эфесе и Герасе изобретение системы кривошипа и шатуна пришлось переносить с 13-го на 6-й век; теперь рельеф Иераполя переносит его еще на три столетия назад, что подтверждает, что каменные лесопилки с водяным приводом действительно использовались, когда Авзоний писал свою « Мозеллу» .
- ↑ Ритти, Греве и Кессенер, 2007 г., стр. 139–141.
- ↑ Ритти, Греве и Кессенер, 2007 г., стр. 149–153.

- ↑ Mangartz 2006, стр. 579f.
- ↑ Уилсон 2002, с. 16
- ↑ Ритти, Греве и Кессенер 2007, с. 156, фн. 74
- ↑ 14,0 14,1 14,2 Уайт-младший 1962, с. 110
- ↑ Hägermann & Schneider 1997, стр. 425f.
- ↑ 16,0 16,1 Уайт-младший, 19 лет62, с. 170
- ↑ Needham 1986, стр. 112–113.
- ↑ Холл 1979, с. 80
- ↑ 19,0 19,1 19,2 19,3 19,4 Уайт, мл. 1962, с. 111
- ↑ Холл 1979, с. 48
- ↑ Уайт-младший, 1962, стр. 105, 111, 168.
- ↑ Уайт-младший, 1962, с. 167; Холл 1979, с. 52
- ↑ Уайт-младший, 1962, с. 112
- ↑ Уайт-младший, 1962, с. 114
- ↑ 25,0 25,1 Уайт-младший, 19 лет62, с. 113
- ↑ Hall 1979, стр. 74f.
- ↑ Уайт-младший, 1962, с. 167
- ↑ Уайт-младший, 1962, с. 172
- ↑
- ↑ Уайт-младший, 1962, с.
 104
104 - ↑ Needham 1986, стр. 118–119.
- ↑ Уайт-младший, 1962, с. 104:
Тем не менее, исследователь китайской технологии в начале двадцатого века отмечает, что даже поколение назад китайцы «не достигли той стадии, когда непрерывное вращательное движение заменяет возвратно-поступательное движение в технических устройствах, таких как дрель, токарный станок, пила. и т. д. Чтобы сделать этот шаг, необходимо знакомство с кривошипом. Кривошип в его простой рудиментарной форме мы находим в [современной] китайской лебедке, использование которой, однако, по-видимому, не дало толчка к изменению возвратно-поступательного движения на круговое в других устройствах». В Китае кривошип был известен, но оставался бездействующим по крайней мере девятнадцать столетий, его взрывной потенциал для прикладной механики оставался непризнанным и неиспользованным.
- ↑
- ↑ al-Hassan & Hill 1992, стр. 45, 61.
- ↑
- ↑ Ахмад И Хассан.
 Кривошипно-шатунная система в машине с непрерывным вращением.
Кривошипно-шатунная система в машине с непрерывным вращением. - ↑
- ↑ Уайт-младший, 1962, с. 170:
Однако то, что аль-Джазари не вполне понял значение кривошипа для соединения возвратно-поступательного движения с вращательным, доказывает его необычайно сложный насос, приводимый в действие зубчатым колесом, установленным эксцентрично на его оси.
Библиография
- .
Внешние ссылки
- Crank Highlight: Гипервидео конструкции и работы четырехцилиндрового двигателя внутреннего сгорания, любезно предоставленное Ford Motor Company
- Цифровая библиотека кинематических моделей для проектирования (KMODDL) — фильмы и фотографии сотен работающих моделей механических систем в Корнельском университете. Также включает электронную библиотеку классических текстов по механическому дизайну и инженерии.

На этой странице используется некоторый контент из Википедии . Оригинальная статья была на Crank (механизм). Список авторов можно увидеть на странице истории . Как и в случае с Tractor & Construction Plant Wiki, текст Википедии доступен по лицензии Creative Commons по лицензии Attribution и/или GNU Free Documentation License. Пожалуйста, проверьте историю страниц, чтобы узнать, когда исходная статья была скопирована в Wikia. Динамическое моделирование и расчет кривошипно-ползункового механизма многопараметрической модели трения в беспроводной связи
На этой странице
АннотацияВведениеРезультаты и обсуждениеЗаключениеДоступность данныхКонфликты интересовБлагодарностиСсылкиАвторское правоСтатьи по теме
анализируется. Более ранние модели не могут найти точное трение; следовательно, правильная функция кривошипа не может быть идентифицирована.
 Динамический кривошипно-шатунный механизм необходим для сложных механических применений. Доступные модели не подходят для будущих механических выставок. В этой работе реализован кривошипный ползун на основе SVM с динамической моделью трения. Математический метод SVM постоянно уравновешивает динамическое моделирование с балансировкой трения. Наконец, методы «контролер/наблюдатель» показали эффективные численные результаты. Переменные системы анализируются, отмечая ошибки и сделанные оценки. Производительность измеряет точность 98,45%, чувствительность 97,34%, кривошипный ползунок 96,34% и полнота 97,34%.
Динамический кривошипно-шатунный механизм необходим для сложных механических применений. Доступные модели не подходят для будущих механических выставок. В этой работе реализован кривошипный ползун на основе SVM с динамической моделью трения. Математический метод SVM постоянно уравновешивает динамическое моделирование с балансировкой трения. Наконец, методы «контролер/наблюдатель» показали эффективные численные результаты. Переменные системы анализируются, отмечая ошибки и сделанные оценки. Производительность измеряет точность 98,45%, чувствительность 97,34%, кривошипный ползунок 96,34% и полнота 97,34%.1. Введение
На основе адаптивной саморекурсивной вейвлетной нейронной сети (SRWNN) и контроллера/наблюдателя скользящего режима кривошипно-ползунковым механизмом теперь можно управлять новым способом [1]. В качестве цели, есть надежда, что ошибки отслеживания будут уменьшены. Движение этого устройства происходит по заданной траектории. Дизайн инициатора представляет собой двухэтапный процесс.
 Один из них представляет собой подход скользящего режима, а другой — стратегию нескользящего режима. Еще одним компонентом контроллера является адаптивная SRWNN. В этом режиме контроллера веса SRWNN сначала обучаются в автономном режиме, а затем обновляются в режиме онлайн. Это известно как адаптивное управление. Кроме того, в этом исследовании предлагается использовать гибридный метод управления. Использование датчиков скорости было прекращено в пользу наблюдателя скорости. Начинаются исследования, за которыми следует разработка уравнений динамики кривошипно-кривошипного механизма, рекомендуемого наблюдателя и методов управления.
Один из них представляет собой подход скользящего режима, а другой — стратегию нескользящего режима. Еще одним компонентом контроллера является адаптивная SRWNN. В этом режиме контроллера веса SRWNN сначала обучаются в автономном режиме, а затем обновляются в режиме онлайн. Это известно как адаптивное управление. Кроме того, в этом исследовании предлагается использовать гибридный метод управления. Использование датчиков скорости было прекращено в пользу наблюдателя скорости. Начинаются исследования, за которыми следует разработка уравнений динамики кривошипно-кривошипного механизма, рекомендуемого наблюдателя и методов управления.В механической трансмиссии ползунково-кривошипный механизм является обычным механизмом трансмиссии. Трудно анализировать движение механизмов, поэтому мы не смогли получить производительность после того, как завершили проектирование и проверили его. Кривошипный ползун — это устройство, используемое в различных отраслях и секторах, таких как бензиновые и дизельные двигатели, для преобразования линейного смещения силы в круговое движение; иначе наоборот.
 Даже если в литературе используются некоторые общепринятые методологии, основная цель этого исследования состоит в том, чтобы улучшить ранее описанные исследования. Как известно, нейронные сети с вейвлетами использовались во множестве приложений. В данной работе предлагается рассмотрение различных методов контроля. Контроллер скользящего режима (SMC) и SRWNN будут использоваться для стабилизации этой механической системы в соответствии с основной целью этого исследования. Рассмотрена замкнутая механическая система кривошип-ползун.
Даже если в литературе используются некоторые общепринятые методологии, основная цель этого исследования состоит в том, чтобы улучшить ранее описанные исследования. Как известно, нейронные сети с вейвлетами использовались во множестве приложений. В данной работе предлагается рассмотрение различных методов контроля. Контроллер скользящего режима (SMC) и SRWNN будут использоваться для стабилизации этой механической системы в соответствии с основной целью этого исследования. Рассмотрена замкнутая механическая система кривошип-ползун.В этом исследовании предоставляется наблюдатель, которому не нужны датчики для предсказания скоростей. Для кривошипно-ползункового механизма рекомендуются контроллер скользящего режима и адаптивная самовозвратная вейвлетная нейронная сеть. Было продемонстрировано, что другие стратегии контроллера нейронной сети уступают управлению в скользящем режиме, а также саморекуррентной сети вейвлетов. Следуя принципу разделения, можно построить наблюдатель и контроллер независимо друг от друга.
 Саморекуррентный вейвлет-контроллер нейронной сети более эффективен, чем существующие системы управления нейронными сетями, поскольку он имеет входной слой, материнский вейвлетный слой, выходной слой и выходной слой. Целью статьи является анализ усовершенствованного кривошипного ползункового механизма на основе беспроводной связи для многопараметрических методов трения.
Саморекуррентный вейвлет-контроллер нейронной сети более эффективен, чем существующие системы управления нейронными сетями, поскольку он имеет входной слой, материнский вейвлетный слой, выходной слой и выходной слой. Целью статьи является анализ усовершенствованного кривошипного ползункового механизма на основе беспроводной связи для многопараметрических методов трения.2. Обзор литературы
По данным Азара и др., результаты численных экспериментов показывают, что нисходящий режим и контроллеры SRWNN обеспечивают минимальную ошибку слежения за линейными и угловыми смещениями по сравнению с другими методами, обнаруженными в литературе [2].
Григореску и др. обнаружили, что кривошипно-ползунковый базовый механизм используется для управления другой цепью зубчатой передачи с линейными приводами в этом исследовании, как показано на рисунке. С помощью этой конструкции можно достичь широкого диапазона углов поворота и углов передачи благодаря линейному приводу и зубчатой передаче.
 Использование этих особенностей и непроизвольного перемещения ближайшего компонента к подвижным платформам позволяет избежать сингулярностей первого порядка [3].
Использование этих особенностей и непроизвольного перемещения ближайшего компонента к подвижным платформам позволяет избежать сингулярностей первого порядка [3].Лупуци и др. заявляют, что, используя кривошипно-ползунковый механизм в качестве основы, планарно-параллельный манипулятор приводится в действие зубчатой передачей с линейным приводом и показан в этой статье. Используя линейные приводы ползункового кривошипа, статья иллюстрирует ходы привода ползункового кривошипа. Ротация мобильной платформы также учитывается в двух разных ситуациях [4].
Находки Хуанга описывают робота линии электропередачи, который можно использовать для удаления птичьих гнезд, пока электрики выполняют свою работу. Чтобы избежать риска опасной эксплуатации линии электропередач, эта процедура безопасна, быстра и эффективна [5].
Сингх и др. заявляют, что с использованием носимых датчиков в этом исследовании предлагается инновационный и экономически эффективный метод определения цикла походки при различных двигательных действиях.
 Используя резистор, чувствительный к силе (FSR), было построено беспроводное устройство для контроля угла колена. И ползун-кривошип в сборе, и блок беспроводной обработки сигналов являются частью системы измерения угла колена. Кривошипно-ползунковый механизм с четырьмя стержнями используется для преобразования кругового движения в возвратно-поступательное линейное движение путем измерения силы, создаваемой при ходьбе. Угол колена отслеживается в режиме реального времени для расчета углов суставов в режиме реального времени на блоке обработки сигналов. Используя этот метод, угол колена может быть измерен простым и эффективным способом [6].
Используя резистор, чувствительный к силе (FSR), было построено беспроводное устройство для контроля угла колена. И ползун-кривошип в сборе, и блок беспроводной обработки сигналов являются частью системы измерения угла колена. Кривошипно-ползунковый механизм с четырьмя стержнями используется для преобразования кругового движения в возвратно-поступательное линейное движение путем измерения силы, создаваемой при ходьбе. Угол колена отслеживается в режиме реального времени для расчета углов суставов в режиме реального времени на блоке обработки сигналов. Используя этот метод, угол колена может быть измерен простым и эффективным способом [6].Ян и др. использовали совместную систему рабочих механизмов с несколькими манипуляторами и шестью степенями свободы для создания высокопроизводительного рабочего конца под напряжением для нарезки, зажима, затягивания и ослабления изоляционных проводов. Отдельные и связанные оптимизирующие роботы с распределением энергии могут эффективно заменить человеческую работу и повысить системный интеллект [7].

В этот корпус включены все четыре секции робота: электроподвижная изолирующая платформа, корпус робота и рабочий конец. По завершении процесса есть два конца: конец для зачистки провода и конец для крепления зажима. Было показано, что использование робота для зарядки и отсоединения кабелей является экономически эффективной и экономящей время альтернативой традиционному процессу [8].
По словам Фэна и др., на сегодняшний день это первое исследование, описывающее совершенно новый тип ротора сборщика энергии: такой, который подвешивается и приводится в действие всего двумя тонкими нитями. Вместо преобразования механического движения в высокочастотные колебания осциллятора комбайн может преобразовывать колебания или прямолинейные возвратно-поступательные движения либо в быстрое вращение, либо в высокочастотные малокрутильные колебания ротора [9].
Патра утверждает, что вместо того, чтобы пытаться напрямую сопоставить траекторию стопы, здесь мы стремились сопоставить несколько геометрических особенностей области, окруженной траекторией стопы.
 Используя размеры связи, нейронные сети обучаются прогнозировать геометрические аспекты связи в качестве выходных данных. «Наилучшие размеры» для намеченной траектории были предсказаны с использованием той же обученной сети [10].
Используя размеры связи, нейронные сети обучаются прогнозировать геометрические аспекты связи в качестве выходных данных. «Наилучшие размеры» для намеченной траектории были предсказаны с использованием той же обученной сети [10].Согласно экспериментальному исследованию, проведенному Терницким и др., на значение крутящего момента влияет скорость вращения ведущего вала в механизме нажимного диска. В этой статье показано, что система передачи винт-гайка может использоваться для привода подвижной прижимной пластины [11].
Чен и Яо заявляют, что аналитическое моделирование механизмов может быть легко выполнено, а сложность анализа уменьшена за счет использования программного обеспечения MATLAB для аналитического моделирования, которое имеет мощные функции. Можно повысить степень эффективности проектирования и снизить затраты на проектирование [12].
Ю и Вэй предложили и внедрили усовершенствованную модульную систему взмахов ползуна-кривошипа, которая полностью использует непрерывное высокоскоростное вращение двигателя постоянного тока для увеличения скорости плавания.
 Соответственно, робот-дельфин, построенный с использованием предложенных механизмов, достиг больших скоростей движения, что доказывает жизнеспособность конструкции [13].
Соответственно, робот-дельфин, построенный с использованием предложенных механизмов, достиг больших скоростей движения, что доказывает жизнеспособность конструкции [13].В результате исследований Вэя и Ю был разработан новый механизм взмахов, основанный на ползунковых кривошипах и непрерывном вращении двигателя постоянного тока. Прототип робота был разработан для оценки эффективности разработанных дизайнерских идей [14].
Используя динамический анализ, Chang et al. было определено, где должен располагаться механический переключатель пускового механизма сцепления, и результаты были подтверждены моделированием и тестированием. Будущие исследования должны быть сосредоточены на создании системы передвижения ног с двумя степенями свободы, ударным ползунково-кривошипным механизмом и дополнительным приводом качания [15].
Согласно исследованиям Розена и др., для будущих изменений, испытательные наборы транспортного средства и реальный автомобиль создали мощную среду разработки.
 Используя бортовые датчики и внешнюю арену захвата движения, аппарат успешно летал и продемонстрировал, что эта платформа подходит для исследований энергетики и управления полетом в масштабе насекомых [16].
Используя бортовые датчики и внешнюю арену захвата движения, аппарат успешно летал и продемонстрировал, что эта платформа подходит для исследований энергетики и управления полетом в масштабе насекомых [16].Сайке и Цзянтао заявляют, что ускорение ползунка и угловое ускорение звена можно уменьшить, увеличив набор и длину звена. По результатам моделирования было выбрано лучшее проектное предложение из других. MSGC может минимизировать количество времени и усилий, необходимых для анализа данных, одновременно повышая точность и эффективность процесса [17].
Исследование, проведенное Cai et al. о структурных характеристиках и скользящих движениях в двухкривошипно-ползунковом механизме, а также о последствиях этого для робота, ползающего по кабелю, представлены в этой статье, которая завершает полезное исследование возможности использования реверсивного механизма. двухкривошипно-ползункового механизма в роботе, передвигающемся по кабелю. При попытке решения задачи синтеза выбора канатной связи высотного шагающего робота она имеет особое эталонное значение [18].

Ван и др. заявляют, что безопасность пациентов является главным соображением при разработке устройства, которое не имеет функций быстрого возврата. Также разрабатывается система дистанционного мониторинга медицинской безопасности, чтобы гарантировать, что пациенты смогут пройти реабилитацию в соответствии с назначением. Согласно результатам моделирования и реальных экспериментов, предлагаемый подход к реабилитации является эффективным и результативным [19].
В качестве альтернативы датчикам скорости Azar et al. вместо этого предложите использовать наблюдатель скорости. Результаты численного эксперимента показывают, что скользящий режим и регуляторы SRWNN обеспечивают минимальную ошибку слежения за линейными и угловыми перемещениями по сравнению с другими методами, обнаруженными в литературе [2].
Выводы De Groote et al. показать, что рекуррентная реализация модели NNAP превосходит реализацию с прямой связью с точки зрения предсказания состояния системы. Удалив нейронную сеть из модели, можно получить новое представление о динамике системы.
 Для получения точных оценок взаимодействия неизвестной силы пружины и трения на скользящем механизме мы использовали этот метод испытаний [20].
Для получения точных оценок взаимодействия неизвестной силы пружины и трения на скользящем механизме мы использовали этот метод испытаний [20].Количество переходов в системе связи значительно больше в системе связи, и большая часть связности трафика не оптимизирована в существующих методах. Для преодоления этих ограничений и разработан предлагаемый метод.
3. Методика
В этом разделе дается краткое описание кривошипно-ползункового механизма многопараметрического фрикционного механизма. Связь между модулями и их кривошипами осуществляется предлагаемым беспроводным способом. Для корреляции и передачи сигналов одной и той же трансляции эти антенны использовали ресурсы многополосного мультиплексирования сотовой сети (CNM). Эти беспроводные модемы обеспечивают направленное усиление, которое поможет создать сфокусированную поверхность между отправителем и получателем. Расположение этого соединения, как и многих других, определяется параметрами чипа, количеством кратких и средних звеньев, решением трещин.
 Целью внедрения беспроводных сетей является сокращение числа переходов в системе связи и оптимизация соединения трафика между поверхностями, показанными на рисунке 1.9.0003
Целью внедрения беспроводных сетей является сокращение числа переходов в системе связи и оптимизация соединения трафика между поверхностями, показанными на рисунке 1.9.0003Машины опорных векторов (SVM) для заданного набора точек можно быстро идентифицировать с помощью итеративного подхода. Опорные векторы учитываются как кандидаты в набор опорных векторов-кандидатов нашего алгоритма [21, 22]. Он использует жадную стратегию для включения кандидатов в набор кандидатов. Бывают случаи, когда нам приходится удалять точки, которые уже находятся в наборе кандидатов, потому что они не позволяют нам добавлять новые. Для более быстрой сходимости начнем с пары точек из двух отдельных классов. Затем используются методы, основанные на оптимизации, для увеличения или уменьшения количества возможных опорных векторов. Для соблюдения ограничений KKT алгоритм итеративно просматривает данные. Как правило, наша методика требует O (| S |2) объем памяти, где | С | размер вектора.
 Это демонстрирует, что метод превосходит другие итерационные алгоритмы, такие как SMO и NPA, с точки зрения производительности. Используя ряд реальных наборов данных, мы подтверждаем обнаружение кривошипа.
Это демонстрирует, что метод превосходит другие итерационные алгоритмы, такие как SMO и NPA, с точки зрения производительности. Используя ряд реальных наборов данных, мы подтверждаем обнаружение кривошипа.В условиях канала AWGN результаты BLER разработанного подхода SVC и конкурирующих систем проанализированы на рисунке 1. В точке 10–5 BLER предлагаемая методология SVC превосходит обе. Классический PDCCH был заменен схемой на основе полярного кода, что дало усиление более чем на 4 дБ по сравнению с исходным PDCCH и примерно на 1,1 дБ по сравнению с методом на основе полярного кода. Даже в реальных сценариях, таких как схемы EPA и EVA в LTE-advanced, предлагаемая схема SVC сохраняет свое преимущество в производительности по сравнению с конкурирующими системами:
Трещины в деталях устроены для изменения горизонтального движения на вращательное, как, например, в возвратно-поступательном бензиновом двигателе, или вращательного движения на прямолинейное, как, например, в вращающемся поршневом насосе:
Система 4 с 3 подвижными соединениями и пирамидальной , или скользящее соединение, известно как скользящее соединение.
 Непрерывное движение ползунков приводится в действие вращением кривошипов, или вращение вращательного движения может быть вызвано сжатием газов против движущегося поршня. Встроенные и смещенные рукоятки ползунков — это 2 категории рукояток ползунков.
Непрерывное движение ползунков приводится в действие вращением кривошипов, или вращение вращательного движения может быть вызвано сжатием газов против движущегося поршня. Встроенные и смещенные рукоятки ползунков — это 2 категории рукояток ползунков.Рядный: ползунки на рычажке расположены так, что направление движения подвижного соединения ползунков проходит через базовое соединение кривошипа. При вращении кривошипа создается симметричное движение ползунка вперед и назад.
Движение ползуна несимметрично, если линия движения шарнирного соединения регулятора действительно не проходит через нижнее вращение кривошипов. В одном направлении она идет быстрее, чем в обратном, что называется быстрой техникой:
Прилагаемая диаграмма, на которой движущиеся части слегка окрашены, лучше отображает основную структуру механизма и относительное движение частей. Часть 1, неподвижная рама или блок насоса или двигателя, содержит цилиндр, в котором поршни, часть 4, скользят вперед и назад, как видно в поперечном сечении по боковым стенкам DE и FG.
 Небольшой кружок в точке A представляет собой главный подшипник гребного винта, который также находится в части 1. Часть 2 кривошипа показана как единый компонент, который соединяет центральный вал в точке A с подшипниками шкива в точке B и, следовательно, с частью 3 ведущей шестерни. вал. Кронштейн показан как линейный элемент, который проходит от подшипника поршневого пальца в точке B к подшипникам поршневого пальца в точке C, соединяя его с двигателем, который изображен в части 4 в виде прямоугольника. Три подшипника в точках A, B и C, показанные кружками, позволяют соединенным частям свободно вращаться относительно друг друга. Когда B находится в точке h , поршень будет в положении H , а когда B находится в точке j , поршень будет в положении J . Торцевая часть канистры (где взрываются газовые смеси) на бензиновом двигателе находится на EG; напряжение, вызванное выбросом, толкнет поршень из положения H в положение J ; а потенциальное движение поршня, соединенного с коленчатым валом и вращающегося вокруг несущего груза, вставленного в несущее колесо А, потребуется для возвратного движения из J до H.
Небольшой кружок в точке A представляет собой главный подшипник гребного винта, который также находится в части 1. Часть 2 кривошипа показана как единый компонент, который соединяет центральный вал в точке A с подшипниками шкива в точке B и, следовательно, с частью 3 ведущей шестерни. вал. Кронштейн показан как линейный элемент, который проходит от подшипника поршневого пальца в точке B к подшипникам поршневого пальца в точке C, соединяя его с двигателем, который изображен в части 4 в виде прямоугольника. Три подшипника в точках A, B и C, показанные кружками, позволяют соединенным частям свободно вращаться относительно друг друга. Когда B находится в точке h , поршень будет в положении H , а когда B находится в точке j , поршень будет в положении J . Торцевая часть канистры (где взрываются газовые смеси) на бензиновом двигателе находится на EG; напряжение, вызванное выбросом, толкнет поршень из положения H в положение J ; а потенциальное движение поршня, соединенного с коленчатым валом и вращающегося вокруг несущего груза, вставленного в несущее колесо А, потребуется для возвратного движения из J до H. Генератор приводил бы в движение вал механического насосного механизма.
Генератор приводил бы в движение вал механического насосного механизма.При использовании вместе с вращающимся валом он создает прямолинейное возвратно-поступательное движение, аналогичное движению ползунково-кривошипного механизма. Это особенно эффективно, когда требуемый ход возвратно-поступательного движения невелик по сравнению с размерами приводного вала. Эксцентриковый диск 2 имеет эксцентриситет AB и прикреплен к вращающемуся валу не по центру в точке A на рисунке. Ремешок и стержень 3 состоят из двух частей, скрепленных между собой и вставленных в канавку по периметру диска. Внутри корпуса 1 шток прикреплен к поршню 4. Эксцентрик скользит внутри ленты при вращении вала, и поршень 4 перемещается по прямой траектории длиной 2АВ. В кривошипно-ползунковой системе AB представляет собой коленчатый вал, а BC представляет собой шатун. Поскольку эксцентрик может быть установлен в любом месте вдоль вала, ни одна часть вала не должна превращаться в кривошип. Эксцентрики широко используются для привода клапанных механизмов двигателей и редко используются для передачи больших усилий из-за чрезмерных потерь на трение, как показано на рис.
 2.9.0003
2.9.0003Поиск алгоритмов, использующих внешние примеры для построения обобщений, является целью теорем машинного обучения с учителем (SML), которые затем используются для прогнозирования будущего. На рис. 3 показан момент нагрузки. Категоризация машинного обучения (МО) под наблюдением Сравнение различных контролируемых методов обучения определяется наиболее эффективным алгоритмом. Сбор данных используется для определения переменных алгоритма категоризации и количества вхождений (признаков). Были использованы семь различных методов машинного обучения: случайный лес (RF), таблицы решений (DT), машина опорных векторов (SVM), наивный байесовский анализ (NB), JRip и решение (j48) и нейронные сети (восприятие NN).
В области машинного обучения (ML) и категоризации шаблонов SVM в последнее время приобрели большое значение. Создание линейной или нелинейной поверхности разделения во входном пространстве является ключевым шагом в процессе классификации. Разделяющая функция в классификации опорных векторов может быть записана как линейная комбинация ядер, связанных с каждым опорным вектором.
 векторы.
векторы.Resulting from the combination of the two formulations,where are the corresponding coefficients, b is the offset, Q ij = y i y J K ( x i , x j ) — симметричная матрица с определенным ядром, а C — параметр, используемый для штрафа за точку ошибки в случае разделения. Условия Каруша–Куна–Таккера (ККТ) для дуала можно выразить следующим образом.
Здесь — коэффициенты для каждого соответствующего коэффициента и смещение, b , для каждого из соответствующих коэффициентов. For separable cases, the error points are penalized by Q ij = y i y J K ( x i , x j ) — симметричная матрица с определенным ядром.
 Можно указать условия ККТ для дуала в терминах ККТ.
Можно указать условия ККТ для дуала в терминах ККТ.Это делит обучающую выборку на три части: S , набор опорных векторов , E , набор ошибок и R , хорошо классифицированный набор .
Например, если ошибочные точки наказываются квадратично с помощью C ′, проблема может быть сведена к отдельному случаю с . В соответствии с новым дизайном ядра, где = 1, если I = j и = 0 или иначе. В результате такого подхода проблема SVM сводится к линейно разделимому экземпляру.
Подходы с числовой библиотекой используются для решения задачи квадратичной оптимизации во время обучения SVM. Это трудоемкий в вычислительном отношении процесс, который потенциально может привести к нестабильности и трудновыполним. Одним из решений является использование итерационных методов, таких как последовательная минимальная оптимизация (SMO) и алгоритм ближайшей точки (NPA). Здесь представлены дополнительные доказательства.
Этот метод отслеживает список возможных опорных векторов.
 Старт с парой точек из противоположных классов похож на стратегию DirectSVM. Программа, не колеблясь, добавляет любые обнаруженные нарушения в список возможных кандидатов. Возможно, что другие опорные векторы в наборе могут препятствовать вставке точки нарушения в качестве опорного вектора. Мы удаляем все эти точки из набора кандидатов, удаляя их. Чтобы убедиться, что требования ККТ выполняются, мы снова просматриваем набор данных, пока не будут обнаружены нарушения. Формулировка квадратичного штрафа используется для проверки того, что точки данных в пространстве ядра линейно отделимы, как показано на рисунке 4.9.0003
Старт с парой точек из противоположных классов похож на стратегию DirectSVM. Программа, не колеблясь, добавляет любые обнаруженные нарушения в список возможных кандидатов. Возможно, что другие опорные векторы в наборе могут препятствовать вставке точки нарушения в качестве опорного вектора. Мы удаляем все эти точки из набора кандидатов, удаляя их. Чтобы убедиться, что требования ККТ выполняются, мы снова просматриваем набор данных, пока не будут обнаружены нарушения. Формулировка квадратичного штрафа используется для проверки того, что точки данных в пространстве ядра линейно отделимы, как показано на рисунке 4.9.00034. Результаты и обсуждение
В этих разделах проводится краткое обсуждение обнаружения чудаков на основе беспроводной связи с помощью предложенной модели SVM. Рисунок 5 ясно объясняет систему обнаружения рукояток на основе протокола беспроводной связи. Поверхность отслеживается точкой А, и ближний конец 2–1/4 коленчатого вала регулируется. Отверстия и кривошипные соединения выполнены поворотным ползунком с пуансоном (табл.
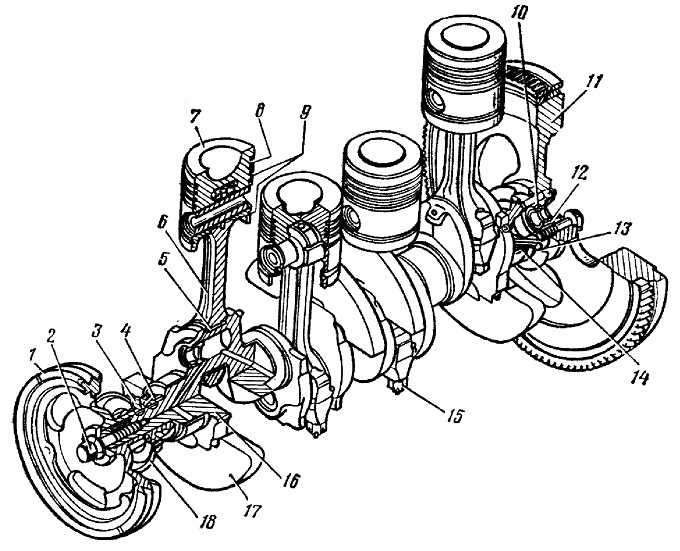 1).
1).Вышеупомянутая теоретическая модель беспроводной связи, основанная на кривошипном анализе, показана на рис. 6.
Контейнеры также можно опорожнять всякий раз, когда глубина или свободное пространство, рассчитанные беспроводным датчиком, превышают пороговый уровень. Интервал времени для опорожнения бункеров установлен на 8 часов, и контейнеры также могут быть опорожнены всякий раз, когда глубина или свободное пространство, рассчитанное ультразвуковым датчиком, достигает заданного уровня. Для оценки и понимания частоты и интервала, при которых сбор данных оптимален, информация представлена в зависимости от времени и глубины кривошипов, как показано на рисунке 7.9.0003
Как видно из рисунка 8, глубина кривошипа по умолчанию составляет 35 нм. Всякий раз, когда мусорное ведро опорожняется, ультразвуковой датчик считывает значение 35. Каждая полоса на этом графике представляет свободное место, доступное в этот час. Всякий раз, когда значение меньше нашего порогового значения 5, пользователь получает предупреждение о необходимости очистки корзины.
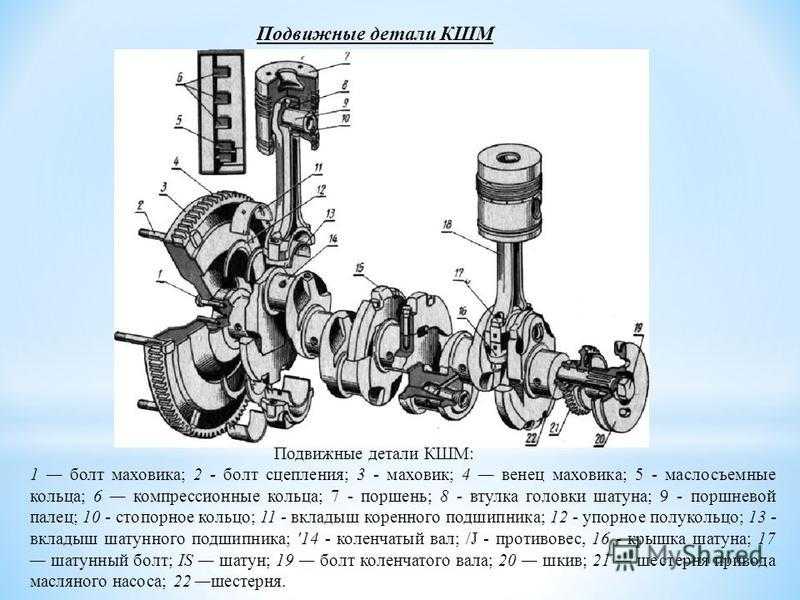 Таким образом, глубина в следующем часе равна 35.
Таким образом, глубина в следующем часе равна 35.Ниже приведены входные изображения вместе с их выходными данными. Объект на входном изображении — это ненужный объект, который классифицируется нашей моделью классификации, и результат можно наблюдать в выходном терминале IDE Python. На выходе получается «сухой» или «влажный» в зависимости от классификации входного изображения.
Область кривошипа была в центре внимания этого исследования, а также его реализации на многочисленных аппаратных устройствах. Он также обсудил многочисленные шаги, сделанные в этом секторе, а также его возможное использование. Возможно, в ближайшие несколько лет компания сможет предложить несколько новых концепций защиты изображений, как показано на рис. 9. . Поскольку более старые версии не могли определить точное трение, невозможно было определить правильную функцию кривошипа. Для сложных механических применений необходим динамический кривошипно-шатунный механизм скольжения. Текущие типы не подходят для будущих механических дисплеев.
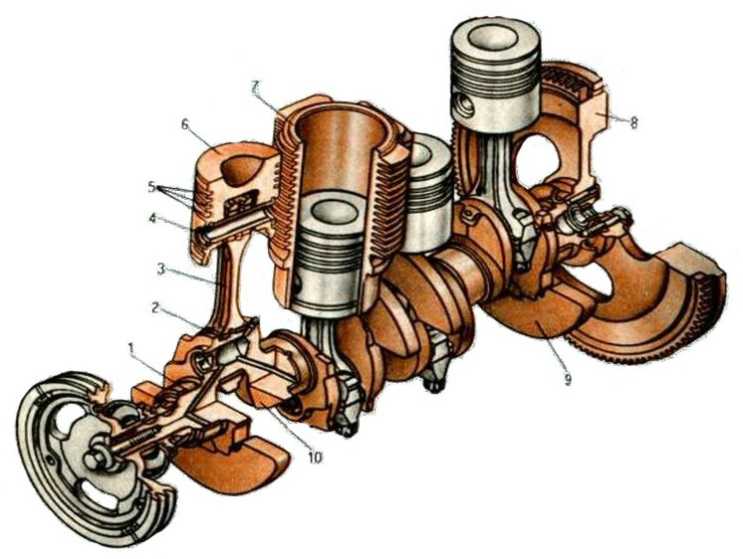 В этом исследовании разработан кривошипный ползун на основе SVM с динамическим трением. Динамическое моделирование и балансировка трения постоянно балансируются с использованием математического подхода SVM. Наконец, числовые результаты подходов «контролер/наблюдатель» успешно представлены. Переменные системы анализируются, отмечая любые ошибки или допущения, которые были сделаны. Производительность оценивается следующим образом: 9Точность 8,45%, чувствительность 97,34%, ползунковый рычажок 96,34% и отзыв 97,34%.
В этом исследовании разработан кривошипный ползун на основе SVM с динамическим трением. Динамическое моделирование и балансировка трения постоянно балансируются с использованием математического подхода SVM. Наконец, числовые результаты подходов «контролер/наблюдатель» успешно представлены. Переменные системы анализируются, отмечая любые ошибки или допущения, которые были сделаны. Производительность оценивается следующим образом: 9Точность 8,45%, чувствительность 97,34%, ползунковый рычажок 96,34% и отзыв 97,34%.Доступность данных
Данные, подтверждающие результаты этого исследования, можно получить у соответствующего автора по обоснованному запросу.
Конфликт интересов
Автор заявляет об отсутствии потенциальных конфликтов интересов в связи с этим исследованием и публикацией этой статьи.
Благодарности
Эта работа была поддержана Фондом естественных наук Ганьсу (№ 21JR7RM190), Фонд естественных наук Цинъян (№ QY2021A-F008), Инновационный фонд Университета Ганьсу (№ 2021B-277), Фонд докторантуры Университета Лундун (XYBY1906) и Наука и технологии Ганьсу (№ 20JR5RA483) .

Ссылки
Х. Чен, Ю. Лу и Л. Ту, «Выявление неисправностей деградации коробки передач с помощью оптимизированной нейронной сети вейвлета», Удары и вибрация , том. 20, нет. 2, стр. 247–262, 2013.
Посмотреть по адресу:
Сайт издателя | Google Scholar
А. Т. Азар, Ф. Э. Серрано, К. Чжу, С. Вайдьянатан и Дж. М. Росселл, «Адаптивная самовозвратная нейронная сеть вейвлетов и контроллер/наблюдатель скользящего режима для кривошипно-шатунного механизма», International Journal of Computer Приложения в технике , вып. 63, нет. 4, стр. 273–285, 2020.
Посмотреть по адресу:
Сайт издателя | Google Scholar
С. М. Григореску, А.-М.-Ф. Лупуци, И. Маниу и Э.-К. Ловаш, «Новый плоскопараллельный манипулятор, использующий кривошипно-зубчатую передачу с линейным приводом в качестве соединительной кинематической цепи», в Труды Европейской конференции по науке о механизмах , стр.
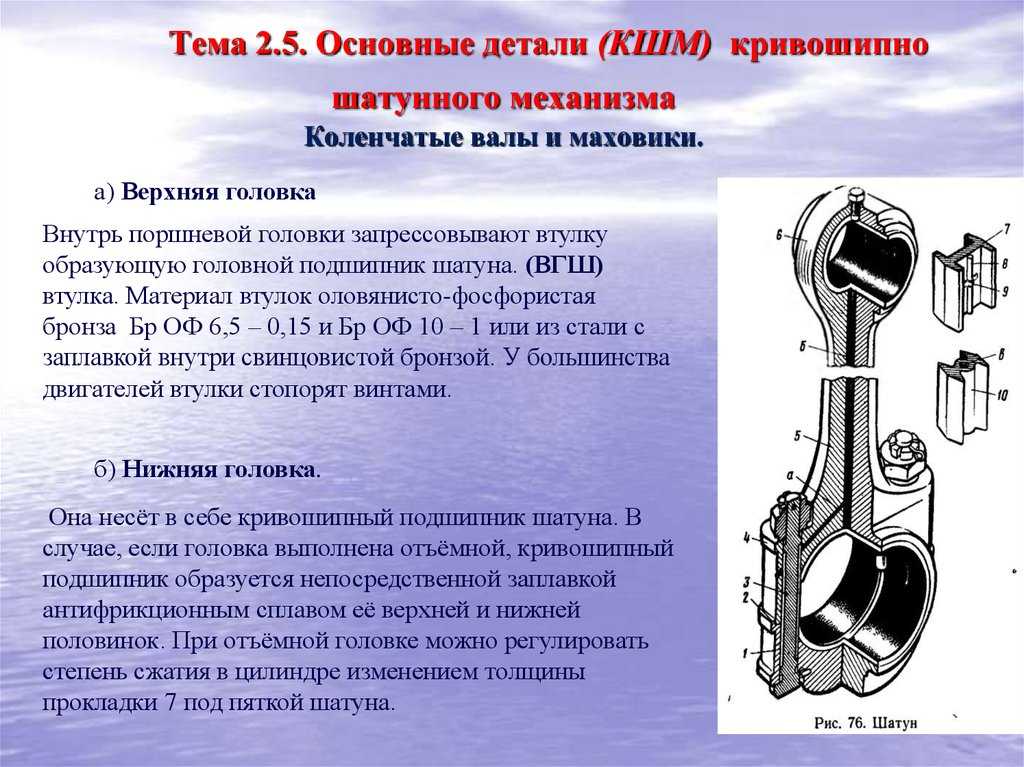 496–505, Springer, Чам, Германия, сентябрь 2020 г.
496–505, Springer, Чам, Германия, сентябрь 2020 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
А. М. Ф. Лупуци, С. М. Григореску, Э. К. Ловаш, К. Стиклару, И. Кэрэбаш, «Кинематика плоскопараллельного манипулятора с зубчатым кривошипом с линейным приводом в качестве ног 3-R (PRRGR) RR», в материалах Объединенной международной конференции по механизмам и механическим трансмиссиям и Международной конференции по робототехнике , стр. 249–261, Springer, Cham, Германия, октябрь 2020 г.
Посмотреть по адресу:
Google Scholar
З. Хуанг, «Конструктивный проект робота для удаления птичьего гнезда на линии электропередачи», в Трудах 3-й Международной конференции по мехатронике и информационным технологиям (ICMEIT) 2019) , стр. 172–176, Atlantis Press, Атлантик, штат Нью-Джерси, США, апрель 2019 г.

Посмотреть по адресу:
Google Scholar
Сингх Р., Сингх Х. и Годиял А. К. Носимая система измерения угла коленного сустава на основе чувствительных к силе резисторов, стр. Материалы конференции IEEE Long Island Systems, Applications and Technology 2018 (LISAT) , стр. 1–3, IEEE, Фармингдейл, штат Нью-Йорк, США, май 2018 г.
Посмотреть по адресу:
Google Scholar
Ю. Ян, С. Сюй, З. Сяо и С. Тонг, «Конструкция механизма электрического робота распределительной сети для отключения или подключения подводящего провода», Серия конференций IOP: Науки о Земле и окружающей среде , том. 237, нет. 6, ID статьи 062027, 2019.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Ю. Ян, Л. Лю, З. Чжоу и Ю.
 Фан, «Разработка живого рабочего робота для распределительной сети», Серия конференций IOP: Earth and Environmental Science , vol. 237, нет. 6, ID статьи 062026, 2019.
Фан, «Разработка живого рабочего робота для распределительной сети», Серия конференций IOP: Earth and Environmental Science , vol. 237, нет. 6, ID статьи 062026, 2019.Посмотреть по адресу:
Сайт издателя | Google Scholar
K. Fan, M. Cai, F. Wang et al., «Ротор с подвеской на струне и приводом для эффективного сбора механической энергии сверхнизкой частоты», Преобразование энергии и управление , vol. 198, ID статьи 111820, 2019.
Посмотреть по адресу:
Сайт издателя | Google Scholar
С. Патра, «Проектирование кросс-тренажера с использованием искусственной нейронной сети», Computer Assisted Mechanics and Engineering Sciences , vol. 28, нет. 2021. Т. 2. С. 119–138.
Посмотреть по адресу:
Google Scholar
Терницкий С.
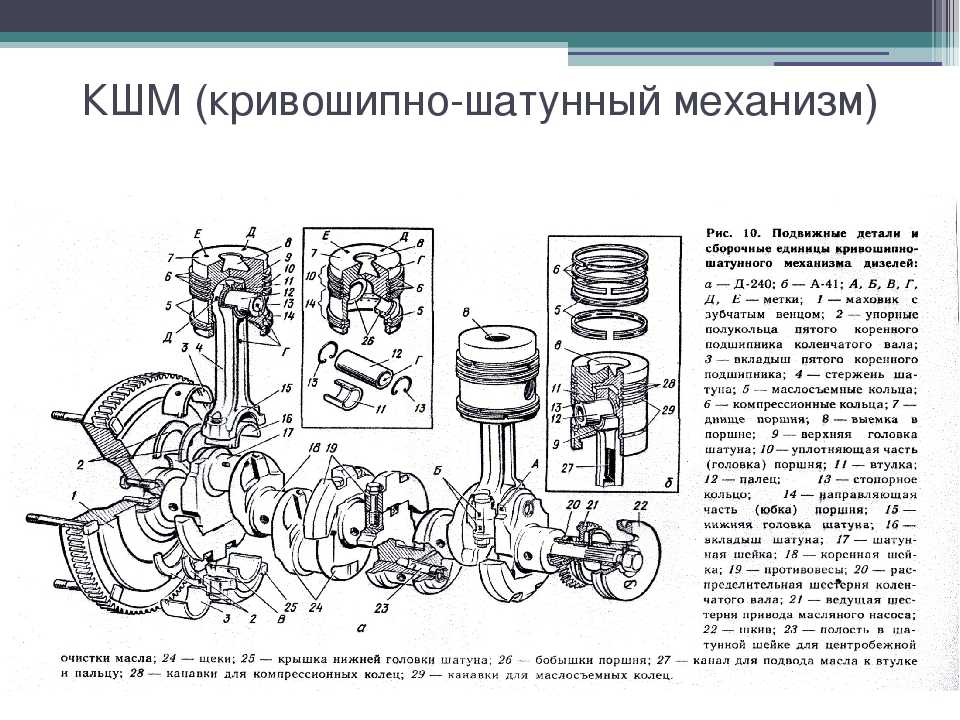 , Рехей И., Кандиак Н., Радиховский И., Млынко О. Экспериментальные исследования резки картона в высекальном прессе с винтово-гайковой передачей механизма привода подвижной прижимной плиты» Acta Mechanica et Automatica , vol. 15, нет. 3, стр. 122–131, 2021.
, Рехей И., Кандиак Н., Радиховский И., Млынко О. Экспериментальные исследования резки картона в высекальном прессе с винтово-гайковой передачей механизма привода подвижной прижимной плиты» Acta Mechanica et Automatica , vol. 15, нет. 3, стр. 122–131, 2021.Посмотреть по адресу:
Сайт издателя | Google Scholar
Дж. П. Чен и З. Х. Яо, «Исследование моделирования ползунково-кривошипных механизмов на основе MATLAB», Журнал Аньхойского технического педагогического колледжа , том. 4, 2005.
Посмотреть по адресу:
Google Scholar
Дж. Ю и К. Вей, «На пути к разработке самоходного робота-дельфина, ориентированного на ползун-кривошип», Усовершенствованная робототехника , том. 27, нет. 12, стр. 971–977, 2013.
Посмотреть по адресу:
Сайт издателя | Google Scholar
C.
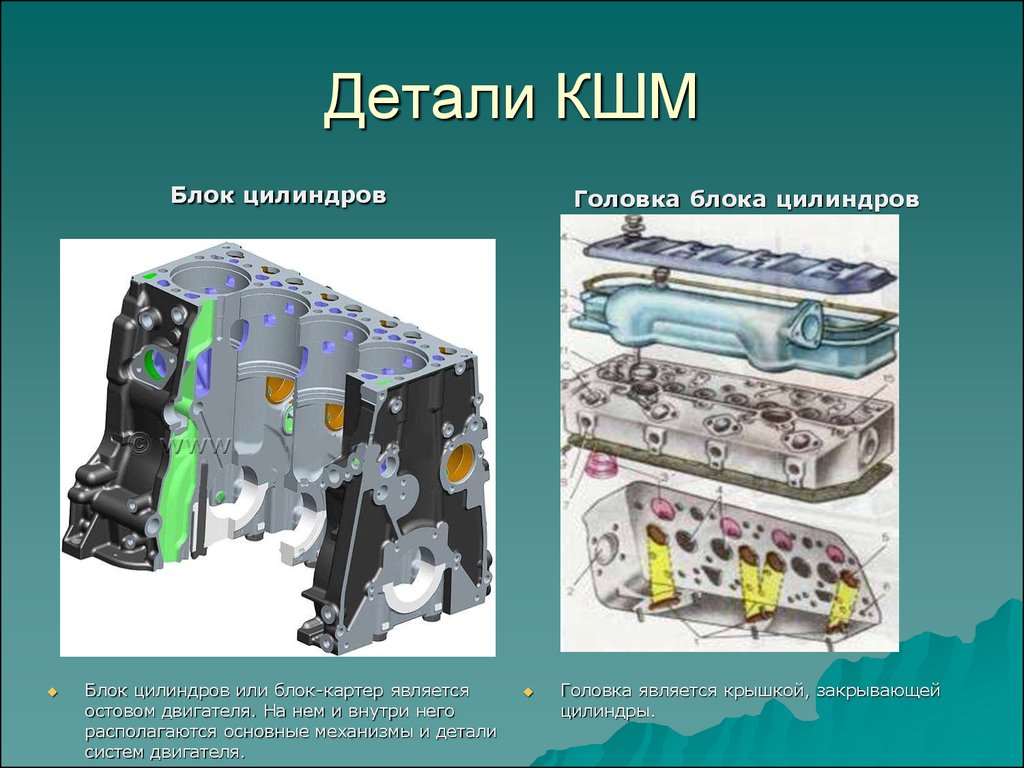 Wei и J. Yu, «Механическая конструкция роботизированного дельфина, ориентированного на ползун-кривошип», в Proceedings of the 10th World Congress on Intelligent Control and Automation , стр. 3741–3746, IEEE, Пекин, Китай, июль 2012 г.
Wei и J. Yu, «Механическая конструкция роботизированного дельфина, ориентированного на ползун-кривошип», в Proceedings of the 10th World Congress on Intelligent Control and Automation , стр. 3741–3746, IEEE, Пекин, Китай, июль 2012 г.Посмотреть по адресу:
Google Scholar
Д. Чанг, Дж. Ким, Д. Чой, К.-Дж. Чо, Т. Сео и Дж. Ким, «Конструкция ползунково-кривошипного механизма ноги для мобильных прыжковых роботизированных платформ», Журнал механических наук и технологий , том. 27, нет. 1, стр. 207–214, 2013 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
М. Х. Розен, Г. Ле Пивен, Р. Сахаи, Н. Т. Джафферис и Р. Дж. Вуд, «Разработка отвязной платформы с машущим крылом массой 3,2 г для экспериментов по энергетике полета и управлению», в Proceedings of the 2016 Международная конференция IEEE по робототехнике и автоматизации (ICRA) , стр.
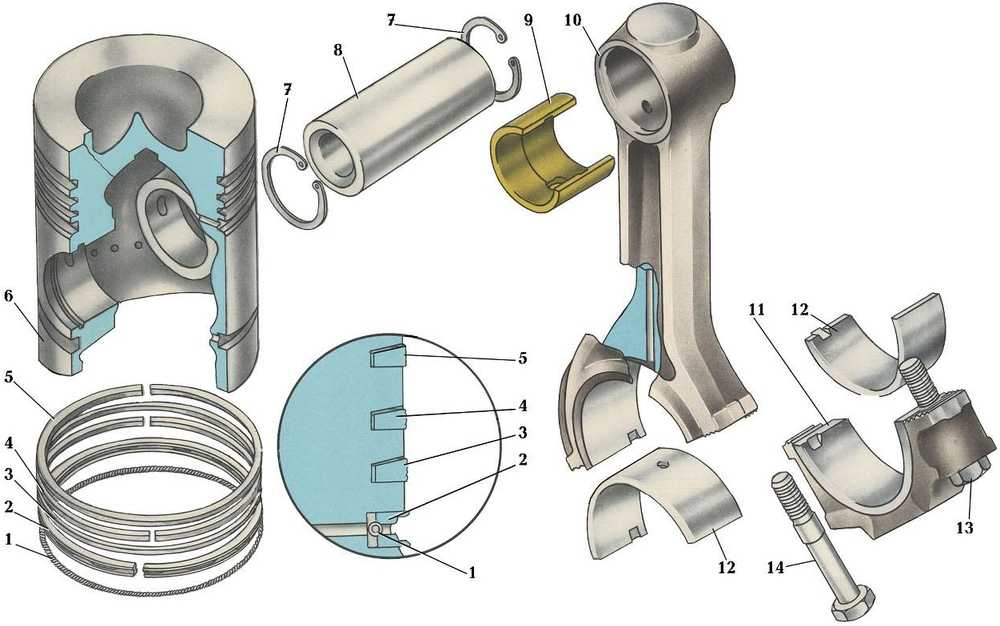 3227–3233, IEEE, Стокгольм, Швеция, май 2016 г.
3227–3233, IEEE, Стокгольм, Швеция, май 2016 г.Просмотр по адресу:
Google Scholar
C. Saike and L. Jiangtao, «Оптимальный дизайн кривошипно-ползунковых механизмов на основе моделирования движения», Journal of Mechanical Transmission , vol. 6, 2007.
Посмотреть по адресу:
Google Scholar
Г. К. Кай, X. М. Чжоу и З. Ван, «Конструкция механической конструкции на основе двухкривошипно-ползункового механизма робота, передвигающегося по кабелю», Journal of Проект машины , вып. 11, 2010.
Посмотреть по адресу:
Google Scholar
Д. Ван, С. Гао и Ю. Лю, «Роботизированная система реабилитации мышц конечностей при квадриплегии», в Трудах Международной конференции IEEE 2011 г. по мехатронике и автоматизации.

- Европе к началу 15 века, часто можно увидеть в работах таких, как немецкий военный инженер Конрад Кайзер. [19] Устройства, изображенные в Bellifortis компании Kyeser, включают кривошипные брашпили (вместо спицованных колес) для натягивания осадных арбалетов, кривошипную цепь ковшей для подъема воды и рукоятки, прикрепленные к колесу колоколов.