9. Назначение рулевого управления, устройство и принцип работы рулевого управления с гидроусилителем руля.
Рулевое управление служит для изменения направления движения автомобиля или колесного трактора. Основным способом изменения направления движения является поворот в горизонтальной плоскости передних направляющих колес относительно задних ведущих колес. Рулевое управление должно быть легким и удобным, обеспечивать правильную кинематику поворота и безопасность движения.
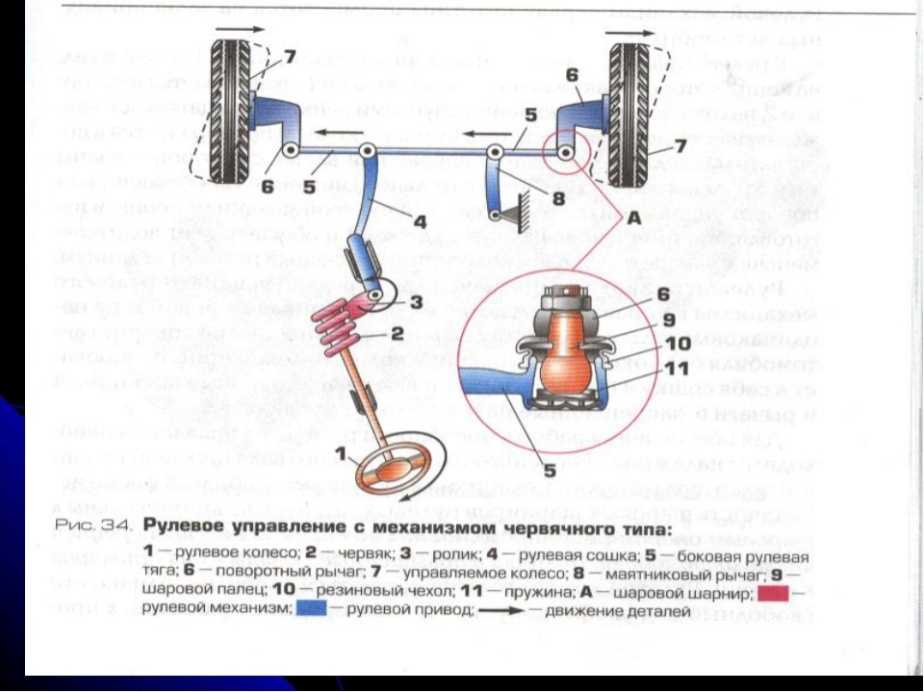
Качение колес на повороте должно происходить без проскальзывания и бокового скольжения. Для этого они должны перемещаться по окружностям, описанным из одного центра поворота О (рис1)
O – центр поворота, α, β – углы поворота колес, B – расстояние между цапфами колес, R – радиус поворота, L – расстояние между осями колес.
Центр
поворота представляет собой точку
пересечения продолжения осей всех
колес. При повороте внешнее колесо по
отношению к центру поворота должно быть
повернуто на несколько меньший угол,
чем внутреннее. В противном случае
поворот будет неизбежно сопровождаться
боковым проскальзыванием передних
колес. Радиус R поворота автомобиля
зависит от его базы L и углов поворота
колес α и β. Чем меньше база автомобиля
или трактора и больше углы поворота
колес, тем меньше радиус поворота.
В противном случае
поворот будет неизбежно сопровождаться
боковым проскальзыванием передних
колес. Радиус R поворота автомобиля
зависит от его базы L и углов поворота
колес α и β. Чем меньше база автомобиля
или трактора и больше углы поворота
колес, тем меньше радиус поворота.
Рулевое управление состоит из рулевого механизма, рулевого привода и усилителя рулевого управления.
Рулевой механизм превращает вращательное движение рулевого вала в качательное движение сошки и увеличивает усилие, передаваемое от рулевого колеса к рулевой сошке. Рулевые механизмы бывают шестеренные, червячные, винтовые, реечные и комбинированные.
Наиболее распространены червячные рулевые механизмы, обладающие малыми габаритами и большими передаточными числами (i = 15–40). Червячные пары выполняют в виде червяка и червячного колеса или сектора, а также в виде глобоидального червяка и двух-, трехгребневого ролика.
Рулевой
привод служит для передачи усилия от
рулевого механизма к колесам и для
обеспечения правильного взаимного
расположения колес при повороте.
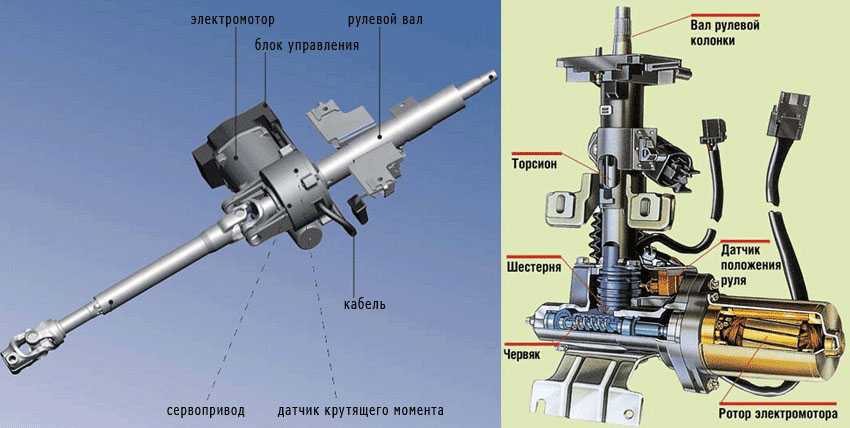
Усилитель рулевого управления устанавливается для облегчения работ
ы водителя, сокращения времени поворота и снижения усилия на рулевом колесе. Наибольшее распространение получили гидроусилители с независимым питанием и питанием от общей гидросистемы трактора.
По конструкции силового элемента гидроусилители могут быть с отдельным силовым цилиндром и с силовым цилиндром, совмещенным с рулевым механизмом.
По
взаимному расположению рулевого колеса
и рулевого механизма различают управления
с совмещенными рулевым колесом и рулевым
механизмом (Т-150К, ЛТ-157, К-703) или с
раздельными. В первом варианте ведущий
элемент рулевого механизма установлен
на нижнем конце вала рулевого колеса,
а во втором – соединен с ним карданной
передачей.
В первом варианте ведущий
элемент рулевого механизма установлен
на нижнем конце вала рулевого колеса,
а во втором – соединен с ним карданной
передачей.
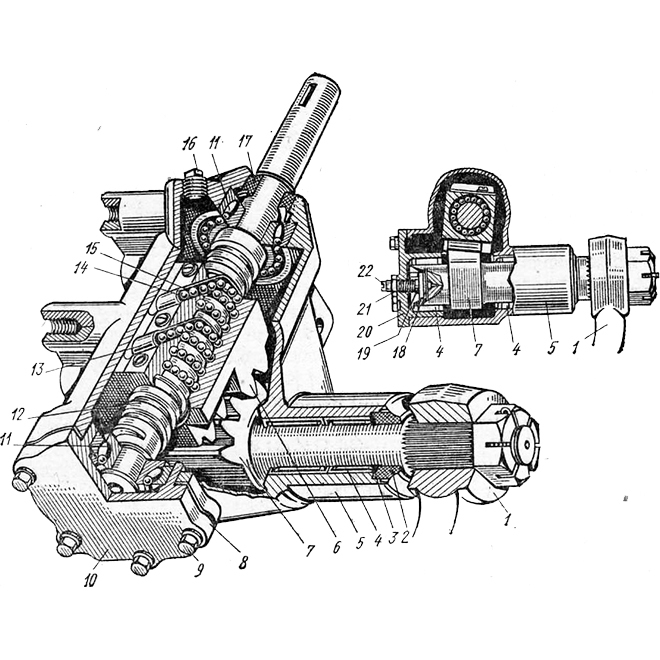
Устройство и принцип работы рулевого управления с гидроусилителем руля. В целях уменьшения усилия, затрачиваемого на поворот рулевого колеса, смягчения ударов, передающихся на рулевое колесо при наезде управляемых колес на неровности дороги, и повышения безопасности при разрыве шин переднего колеса в конструкцию рулевого управления многих автомобилей и тракторов вводят специальные усилители. Усилители бывают гидравлические и пневматические. В рулевом управлении с гидроусилителем последний устанавливается, как правило, в рулевом механизме (рис). Движение от рулевого колеса 1 передается сошке 5 через вал 12, расположенный в колонке 2, карданную передачу 13, детали гидроусилителя 10 и поворотный вал 16 сошки. Рулевое колесо и рулевой механизм раздельного типа.
1 – рулевое колесо, 2 – зубчатый сектор, 3 – гидроусилитель,
4
– поршень-рейка, 5 – винт гидроусилителя,
6 – карданная передача, 7 – вал рулевого
колеса, 8 – рулевая колонка, 9 – поворотный
вал сошки, 10 – поворотный рычаг, 11 –
сошка, 12 – передняя ось, 13 – поперечная
тяга, 14 – цапфа колеса.
описание, виды, назначение, принцип работы, устройство
Каждый узел и механизм автомобиля по-своему важен. Пожалуй, нет такой системы, без которой автомобиль мог бы нормально функционировать. Одна из таких систем – рулевой механизм. Наверное, это одна из самых важных частей машины. Давайте рассмотрим, как устроен этот узел, назначение его, элементы конструкции. А также научимся регулировать и ремонтировать эту систему.
Принцип работы реечной рулевой тяги
Реечный рулевой механизм
Реечный рулевой механизм — является самым распространенным типом механизма, устанавливаемым на легковые автомобили. Основными элементами рулевого механизма являются шестерня и рулевая рейка. Шестерня устанавливается на валу рулевого колеса и находится в постоянном зацеплении с рулевой (зубчатой) рейкой. Схема реечного рулевого механизма
1 – подшипник скольжения; 2 – манжеты высокого давления; 3 – корпус золотников; 4 – насос; 5 – компенсационный бачок; 6 – рулевая тяга; 7 – рулевой вал; 8 – рейка; 9 – компрессионный уплотнитель; 10 – защитный чехол. Работа реечного рулевого механизма происходит следующим образом. При вращении рулевого колеса рейка перемещается влево или вправо. Во время движения рейки перемещаются присоединенные к ней тяги рулевого привода и совершают поворот управляемых колес.
Работа реечного рулевого механизма происходит следующим образом. При вращении рулевого колеса рейка перемещается влево или вправо. Во время движения рейки перемещаются присоединенные к ней тяги рулевого привода и совершают поворот управляемых колес.
Реечный рулевой механизм отличается простотой конструкции и как следствие, высоким КПД, а также имеет высокую жесткость. Но такой тип рулевого механизма чувствителен к ударным нагрузкам от неровностей дороги, склонен к вибрациям. По причине своих конструктивных особенностей реечный рулевой механизм применяется на переднеприводных автомобилях
Червячный рулевой механизм
Схема червячного редуктора
Этот рулевой механизм является одним из «устаревших» устройств. Им оснащены практически все модели отечественной «классики». Механизм применяется на автомобилях с повышенной проходимостью с зависимой подвеской управляемых колес, а также в легких грузовых автомобилях и автобусах.
Конструктивно устройство состоит из следующих элементов:
- рулевой вал
- передача «червяк-ролик»
- картер
- рулевая сошка
Пара «червяк-ролик» находится в постоянном зацеплении. Глобоидальный червяк представляет собой нижнюю часть рулевого вала, а ролик закреплен на валу сошки. При вращении руля ролик перемещается по зубьям червяка, благодаря чему вал рулевой сошки также поворачивается. Результатом такого взаимодействия является передача поступательных движений на привод и колеса.
Глобоидальный червяк представляет собой нижнюю часть рулевого вала, а ролик закреплен на валу сошки. При вращении руля ролик перемещается по зубьям червяка, благодаря чему вал рулевой сошки также поворачивается. Результатом такого взаимодействия является передача поступательных движений на привод и колеса.
Рулевой механизм червячного типа имеет следующие преимущества:
- возможность поворота колес на больший угол
- гашение ударов от дорожных неровностей
- передача больших усилий
- обеспечение лучшей маневренности машины
Изготовление конструкции достаточно сложное и дорогое – в этом главный ее минус. Рулевое управление с таким механизмом состоит из множества соединений, периодическая регулировка которых просто необходима. В противном случае придется заменять поврежденные элементы.
Устройство рулевого управления
Рассмотрим устройство рулевого управления колесных машин с управляемыми колесами. Конструктивно рулевое управление состоит из:
- рулевого механизма;
- усилителя;
- рулевого привода.

Компоновка рулевого управления грузового автомобиля с управляемыми колесами первой оси (КамАЗ, МАЗ) показана на рисунке. Использование регулируемых рулевых колонок позволяет менять угол наклона ступенчато, как правило, с шагом 5° в пределах до 40°. Рулевое управление с передними управляемыми колесами применяется у двух- и трехосных автомобилей. Компоновка и конструкция рулевого управления сравнительно просты и принципиально могут быть сведены к схемам, приведенным на рисунке.
Рис. Схемы рулевого управления автомобилей с управляемыми колесами передней оси: а — с задней неразрезной трапецией; б — с разрезной трапецией и маятниковым рычагом; в — с реечным рулевым механизмом; г — с разрезной трапецией и двумя маятниковыми рычагами; д — с расчлененным рулевым валом; е — с передней неразрезной трапецией; ж — с разрезной трапецией и двумя маятниковыми рычагами, направленными назад; з — с неразрезной трапецией и одним маятниковым рычагом; и — с неразрезной трапецией и объединенным рулевым усилителем; к — с неразрезной трапецией и раздельным рулевым усилителем
На четырехосных автомобилях чаще всего устанавливают рулевое управление с поворотом колес первой и второй осей, первой и четвертой, либо всех осей.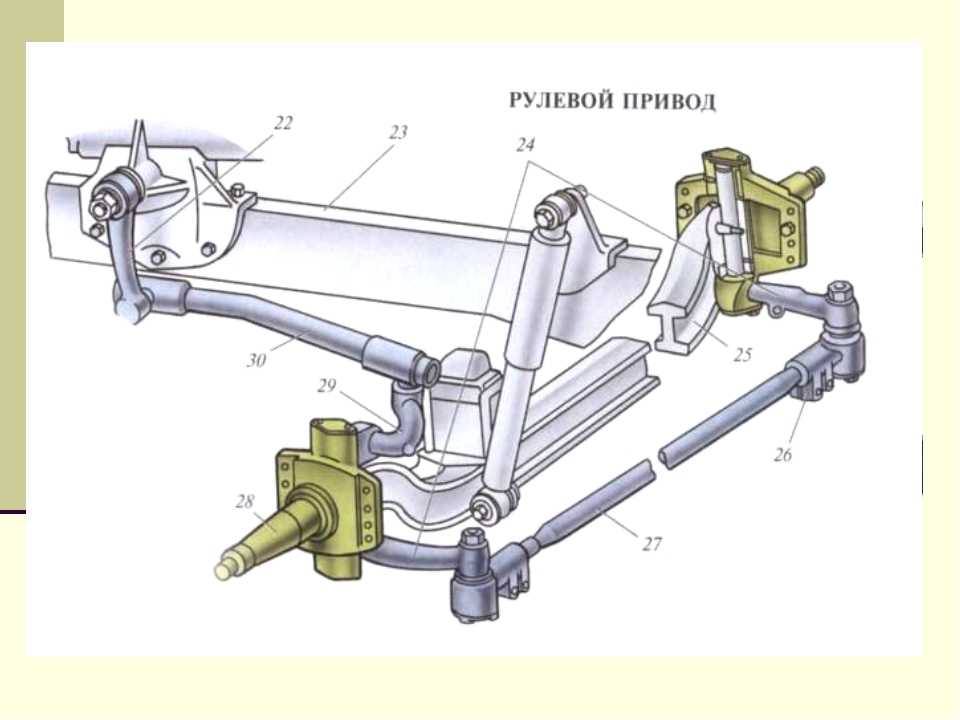
Рекомендуем: Устройство и принцип работы стояночного тормоза
Для многоосных (шестиосных) шасси большой грузоподъемности используют рулевое управление с поворотом колес первых трех осей (в последних схемах для повышения маневренности применяют поворотные колеса самоустанавливающегося типа на шестой оси). При прямолинейном движении автомобиля самоустанавливающиеся колеса, связанные друг с другом приводом, блокируются специальным устройством. При движении в повороте с повышенной кривизной траектории эти колеса разблокируются и свободно поворачиваются в режиме слежения.
Требования к рулевому управлению автомобиля
Согласно стандарту, к рулевому управлению применяются следующие основные требования:
- Обеспечение заданной траектории движения с необходимыми параметрами поворотливости, поворачиваемости и устойчивости.
- Усилие на рулевом колесе для осуществления маневра не должно превышать нормированного значения.
- Суммарное число оборотов руля от среднего положения до каждого из крайних не должно превышать установленного значения.
- При выходе из строя усилителя должна сохраняться возможность управления автомобилем.
Существует еще один стандартный параметр, определяющий нормальное функционирование рулевого управления — это суммарный люфт. Данный параметр представляет собой величину угла поворота руля до начала поворота управляемых колес.
Значение допустимого суммарного люфта в рулевом управлении должно быть в пределах:
- 10° для легковых автомобилей и микроавтобусов;
- 20° для автобусов и подобных транспортных средств;
- 25° для грузовых автомобилей.
Особенности правостороннего и левостороннего руля
В большинстве стран левостороннее рулевое управление (или правостороннее движение). Основное отличие механизмов не только в позиции руля, но и в рулевом редукторе, который адаптирован под различные стороны подключения. С другой стороны, переоборудование правостороннего руля на левостороннее рулевое управление все же возможно.В современных автомобилях может быть предусмотрено правостороннее или левостороннее рулевое управление, что зависит от вида транспортного средства и законодательства отдельных стран. В зависимости от этого руль может располагаться справа (при левостороннем движении) или слева (при правостороннем).
В зависимости от этого руль может располагаться справа (при левостороннем движении) или слева (при правостороннем).
В некоторых видах спецтехники, например, в тракторах, предусматривается гидрообъемное рулевое управление, которое обеспечивает независимость положения руля от компоновки других элементов. В этой системе отсутствует механическая связь привода и рулевого колеса. Для выполнения поворота колес гидрообъемное рулевое управление предусматривает силовой цилиндр, которым управляет насос-дозатор.
Основные достоинства, которые имеет гидрообъемное рулевое управление для транспортных средств в сравнении с классическим рулевым механизмом с гидравлическим усилителем: необходимость приложения меньших усилий для выполнения поворота, отсутствие люфта, а также возможность произвольного расположения узлов системы.
Таким образом, ГОРУ может обеспечивать и правостороннее, и левостороннее рулевое управление. Это позволяет его устанавливать в транспортных средствах с особыми режимами эксплуатации (дорожно-строительные машины, уборщики).
Некоторые особенности работы рулевого управления автомобиля
Большинство современных моделей автомобильного транспорта имеют инновационную систему управления всеми четырьмя колесами. Благодаря этому значительно улучшается динамика движения транспортного средства на местности со сложным рельефом. Помимо этого, рулевое управление автомобиля адаптированное на все колеса позволяет добиться большей маневренности при скоростной езде. Это возможно благодаря повороту каждого из колес.
Примечательно, что в рулевом управлении подруливание колес может осуществляться системой в пассивном режиме. Это возможно благодаря наличию в конструкции задней части подвески специальных упругих резинометаллических деталей. При возникновении крена кузова за счет изменения величины и направления нагрузки осуществляется изменение направления движения. Рулевое управление с функцией подруливания задних колес позволяет эффективно распределить усилие для поворота всех колес. Помимо этого, такая система не позволяет осуществить поворот колес при активном состоянии подвески.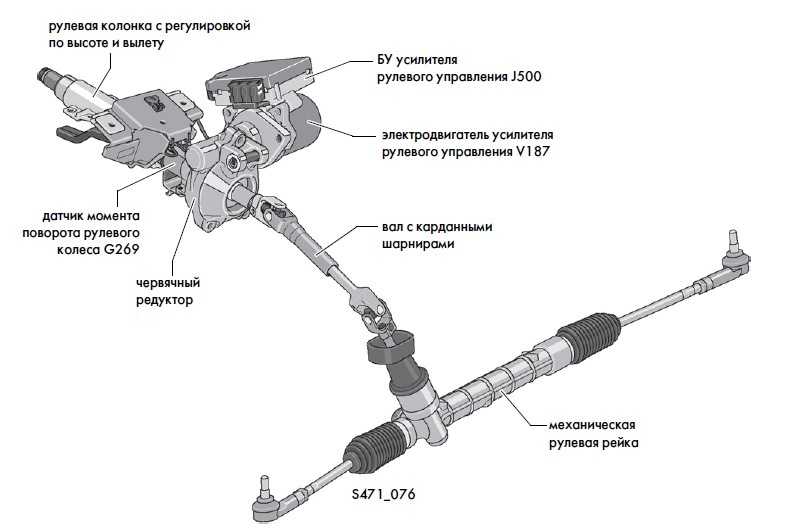
В конструкцию адаптивной системы подруливания входят шарниры и тяги. Шарнир имеет несколько элементов в своем составе, для удобства использования его конструкция представлена в виде снимающегося наконечника. Кинематическую схему рулевого управления автомобиля удобнее всего представить в идее прямоугольника, на каждой из сторон которого находятся:
- плечи;
- угол схождения;
- развал;
- продольный и поперечный наклон.
Плечи, продольный и поперечный наклон обеспечивают стабилизацию движения, в то время как остальные параметры находятся в постоянном противодействии. Поэтому еще одной задачей рулевого управления является стабилизация всех возникающих в процессе движения сил.
Регулировка схождения колес
На рулевых наконечниках имеются металлические втулки, при помощи которых регулируется их длина. Следовательно, именно с их помощью можно установить схождение колес. Если вы меняете трапецию или тяги, схождение обязательно нарушится. Поэтому при монтаже новых элементов необходимо убедиться в том, что их длина точно такая же, как и у снятых. Для этого при помощи рулетки нужно провести замеры перед снятием.
Для этого при помощи рулетки нужно провести замеры перед снятием.
Благодаря этому вы минимизируете нарушения схождения, что позволит вам без проблем доехать до станции техобслуживания. Самостоятельно проводить регулировку развала и схождения передних колес не рекомендуется. Стоимость этой услуги не очень высокая, зато с помощью компьютерных стендов можно обеспечить максимально точное схождение, что улучшит управление автомобилем.
Основные причины неисправности
Устройство системы управления автомобиля, как и все его механизмы, подвержены поломкам.
Рекомендуем: Электроусилитель руля: устройство, описание, назначение, принцип действия, режим работы
В большинстве случаев их можно предугадать заранее, по причине наличия предшествующих симптомов.
Системе могут нанести ущерб, события неблагоприятного характера , такие как:
- неправильная эксплуатация транспортного средства, выраженная в агрессивном стиле езды;
- некачественное покрытие дороги, наличие выбоин и неровностей;
- установка запчастей неоригинального производства при проведении процедуры их замены;
- некомпетентное проведение ремонтных работ ;
- несвоевременное обслуживание;
- превышение срока эксплуатации оборудования.

Возникшие неполадки с системой управления авто в процессе движения транспорта, могут стать причиной аварий. Поэтому следует прислушиваться к признакам, которые относятся к предвестникам неприятностей.
Рулевая колонка
Выполняет передачу вращательного усилия, которое создает водитель для изменения направления. Состоит она из рулевого колеса, располагаемого в салоне (на него и воздействует водитель, вращая его). Оно жестко посажено на вал колонки. В устройстве этой части рулевого управления очень часто используется вал, разделенный на несколько частей, соединенных между собой карданными шарнирами.
Такая конструкция сделана не просто так. Во-первых, это позволяет менять угол положения рулевого колеса относительно механизма, смещать его в определенную сторону, что нередко необходимо при компоновке составных частей авто. В дополнение такая конструкция позволяет повысить комфортабельность салона – водитель может менять положение рулевого колеса по вылету и наклону, обеспечивая максимально удобное его положение.
Во-вторых, составная рулевая колонка имеет свойство «ломаться» в случае ДТП, снижая вероятность травмирования водителя. Суть такова – при фронтальном ударе двигатель может сместиться назад и толкнуть рулевой механизм. Если бы вал колонки был цельным, изменение положения механизма привело бы к выходу вала с рулевым колесом в салон. В случае же со составной колонкой, перемещение механизма будет сопровождаться всего лишь изменением угла одной составляющей вала относительно второй, а сама колонка остается неподвижной.
Винтовой рулевой механизм
Винтовой рулевой механизм объединяет следующие конструктивные элементы: винт на валу рулевого колеса; гайку, перемещаемую по винту; зубчатую рейку, нарезанную на гайке; зубчатый сектор, соединенный с рейкой; рулевую сошку, расположенную на валу сектора.
Особенностью винтового рулевого механизма является соединение винта и гайки с помощью шариков, чем достигается меньшее трение и износ пары.
Принципиально работа винтового рулевого механизма схожа с работой червячного механизма.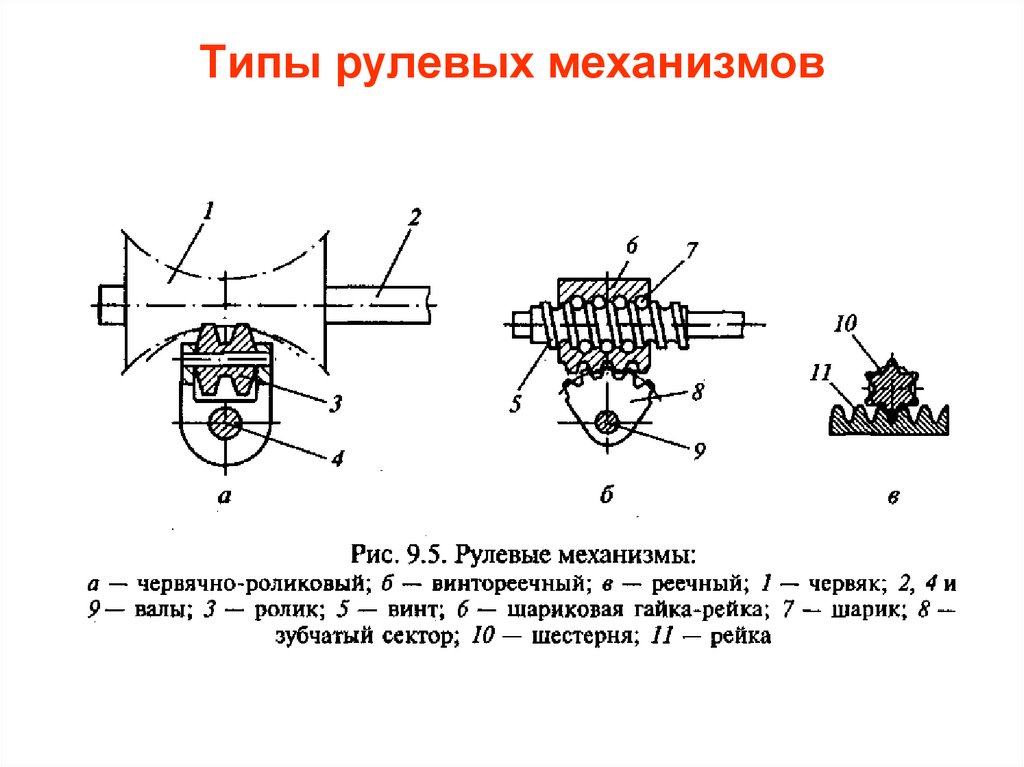 Поворот рулевого колеса сопровождается вращением винта, который перемещает надетую на него гайку. При этом происходит циркуляция шариков. Гайка посредством зубчатой рейки перемещает зубчатый сектор и с ним рулевую сошку.
Поворот рулевого колеса сопровождается вращением винта, который перемещает надетую на него гайку. При этом происходит циркуляция шариков. Гайка посредством зубчатой рейки перемещает зубчатый сектор и с ним рулевую сошку.
Винтовой рулевой механизм в сравнении с червячным механизмом имеет больший КПД и реализует большие усилия. Данный тип рулевого механизма устанавливается на отдельных легковых автомобилях представительского класса, тяжелых грузовых автомобилях и автобусах.
Как меняется трапеция в сборе
Если нет специального съемника, то можно извлечь палец при помощи молотка. Для этого необходимо наносить удары вдоль оси по рычагу. Желательно заблаговременно обработать все элементы проникающей смазкой. Это немного облегчит проведение работ.
Аналогичным образом выкручивается вторая гайка и выпрессовывается палец. Только после этого можно полностью снять рулевой наконечник или центральную тягу.
При замене рулевой трапеции вам необходимо отсоединить:

По времени это выйдет намного меньше, нежели замена всех наконечников по очереди. Усилитель руля, если он установлен на автомобиле, не нужно демонтировать.
Назначение рулевого управления
Для осуществления движения транспортного средства (ТС) по выбираемой водителем траектории служит рулевое управление (РУ), конструкция которого во многом определяет безопасность движения и утомляемость водителя. К рулевому управлению ТС предъявляются специфические требования, основными из которых являются:
- обеспечение высокой маневренности ТС
- легкость управления (за счет применения усилителей рулевого управления)
- обеспечение по возможности чистого качения (без бокового скольжения) всех колес ТС при поворотах (за счет правильной конструкции привода)
- автоматическая стабилизация управляемых колес, т.е. возвращение их в состояние прямолинейного движения после снятия воздействия со стороны водителя
- необратимость рулевого управления — отсутствие передачи ударов управляемых колес о неровности дороги на руки водителя
- обеспечение следящего действия (любое воздействие водителя на рулевое управление должно вызывать соответствующее изменение направления движения)
Рис.
Рулевое управление: 1 — масляный радиатор; 2, 4 — валы; 3 — рулевая колонка; 5 — рулевое колесо; 6 — насос гидроусилителя руля; 7 — рулевой механизм; 8 — сошка
Система рулевого управления представляет собой совокупность устройств, служащих для поворота управляемых колес автомобиля при воздействии водителя на рулевой управляющий орган (рулевое колесо).
Рекомендуем: Рулевая тяга — устройство и неисправности
Снятие рулевых тяг и наконечников
Если вам необходимо полностью заменить все наконечники тяги, то намного проще окажется приобрести рулевую трапецию ВАЗ-2107. Весь узел в сборе намного проще установить, а самое главное – это намного дешевле, нежели приобретать каждую деталь по отдельности. Все работы обязательно проводятся с установленным на смотровой яме или эстакаде автомобилем. Левая и правая тяги меняются практически одинаково.
Процедура замены выглядит следующим образом:

Устройство системы рулевого управления
Схема рулевого управления
Конструктивно система рулевого управления состоит из следующих элементов:
- Рулевое колесо (руль) — предназначено для управления водителем с целью указания направления движения автомобиля. В современных моделях оно дополнительно оснащается кнопками управления мультимедийной системой. Также в рулевое колесо встраивается передняя подушка безопасности водителя.
- Рулевая колонка — выполняет передачу усилия от руля к рулевому механизму. Она представляет собой вал с шарнирными соединениями. Для обеспечения безопасности и защиты от угона колонка может быть оснащена электрическими или механическими системами складывания и блокировки.
 Дополнительно на рулевой колонке устанавливается замок зажигания, органы управления светотехникой и стеклоочистителем ветрового стекла автомобиля.
Дополнительно на рулевой колонке устанавливается замок зажигания, органы управления светотехникой и стеклоочистителем ветрового стекла автомобиля. - Рулевой механизм — выполняет преобразование усилия, создаваемого водителем через поворот рулевого колеса и передает его приводу колес. Конструктивно представляет собой редуктор с некоторым передаточным отношением. Сам механизм соединяет с рулевой колонкой карданный вал рулевого управления.
- Рулевой привод — состоит из рулевых тяг, наконечников и рычагов, выполняющих передачу усилия от рулевого механизма к поворотным кулакам ведущих колес.
- Усилитель рулевого управления — повышает усилие, которое передается от руля к приводу.
- Дополнительные элементы (амортизатор рулевого управления или «демпфер», электронные системы).
Стоит также отметить, что подвеска и рулевое управление автомобиля имеют тесную взаимосвязь. Жесткость и высота первой определяют степень отклика автомобиля на вращение рулевого колеса.
Инструмент для ремонта
Для замены одной рулевой тяги или всей трапеции в сборе необходимо обзавестись следующими инструментами:
- набором рожковых и накидных ключей, головок;
- плоскогубцами с узкими носиками;
- съемником наконечников рулевых тяг.
На последний пункт нужно обратить особое внимание. Без этого устройства снять наконечники практически нереально.
Дело в том, что шарниры наконечников устанавливаются в конические отверстия. Из-за этого соединения очень тяжело разорвать. Существует много видов съемников, которыми можно разобрать наконечники рулевых тяг. Лучше всего купить универсальный, с помощью которого вы сможете снимать не только рулевые наконечники, но и шаровые опоры.
Роль усилителя в системе рулевого управления
Этот элемент помимо того, что позволяет снизить усилие прикладываемое водителем к рулевому колесу, позволяет значительно увеличить точность управления автомобилем. Благодаря наличию усилителя в конструкции рулевого управления появилась возможность использовать в системе элементы, обладающие небольшой величиной придаточного числа. Усилители системы управления делятся на три типа:
- Электрический.
- Пневматический.
- Гидравлический.
Однако большее распространение получил последний тип.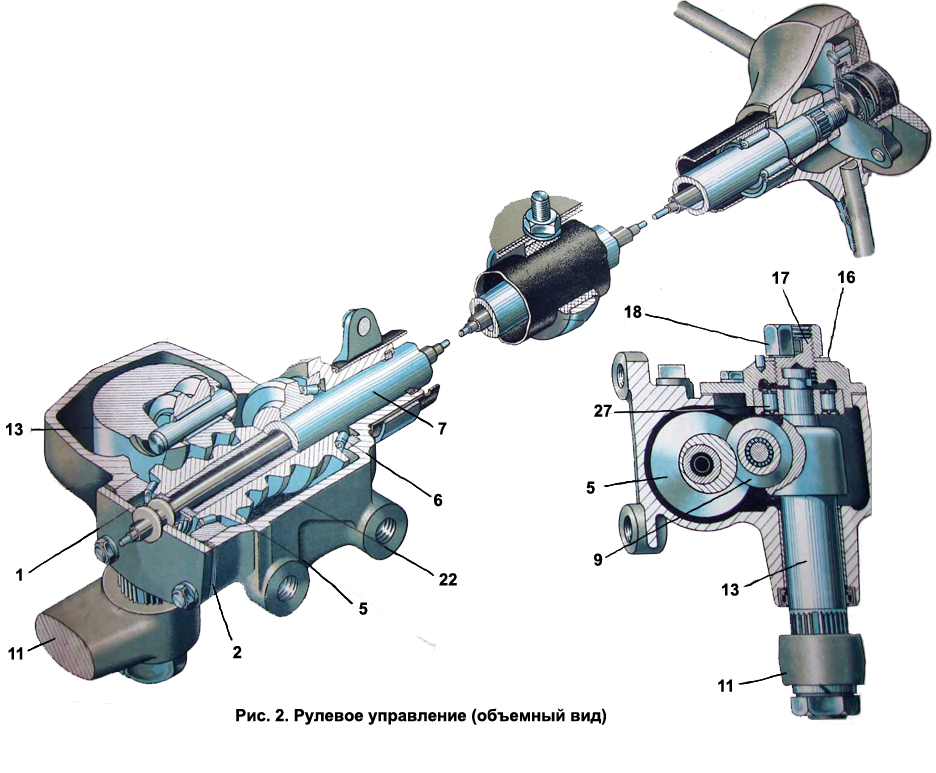 Гидравлика отличается надежностью конструкции и плавностью работы, но требует технического обслуживания по замени жидкости. Электроусилитель рулевого управления встречается реже, но все же большинство моделей современной автомобильной техники укомплектовано именно им. Усиление в нем обеспечивает электрический привод. Заметим, что электронное управление отличается наличием расширенного ряда возможностей, но изредка требует проверки и регулировки.
Гидравлика отличается надежностью конструкции и плавностью работы, но требует технического обслуживания по замени жидкости. Электроусилитель рулевого управления встречается реже, но все же большинство моделей современной автомобильной техники укомплектовано именно им. Усиление в нем обеспечивает электрический привод. Заметим, что электронное управление отличается наличием расширенного ряда возможностей, но изредка требует проверки и регулировки.
Важность исправного рулевого управления
Любое транспортное средство относится к категории источника повышенной опасности, поэтому, чтобы предотвратить неприятности, связанные с авариями и их последствиями, рекомендуется его содержать в исправности и постоянно контролировать техническое состояние.
Поскольку, основное назначение рулевого управления заключается в предоставлении водителю возможности маневрированного управления машиной, то исправное состояние системы обеспечит водителю уверенность и безопасность, которая, кстати, важна не только для него, но и для пассажиров.
Безопасное рулевое управление упомянуто и в правилах дорожного движения, которые запрещают эксплуатировать авто при выявлении неисправности системы управления, люфтов, при подтекании масла в рейке из-под пересохших сальников, а также наличия постоянных шумов.
Стоит отметить, что исправность системы управления авто оказывает немаловажное влияние на состояние шин, которые в идеальном случае должны изнашиваться равномерно, чтобы избежать впоследствии кидания транспортного средства по дороге и возникших сложностей в управлении даже после устранения проблем в системе управления.
Автоподвеска и рулевое управление, 5-е издание, Руководство по ремонту
Перейти к содержимому
текущий документВиртуальная коллекция AHВиртуальная коллекция AHВсе документы
Контекст
Автор: Крис Йохансон
Это руководство поможет учащемуся выполнить все задания NATEF в области A4 «Подвеска и рулевое управление», включая проверку, тестирование и диагностику систем подвески и рулевого управления; удаление и замена автономных компонентов; а также удаление, капитальный ремонт и переустановка основных компонентов.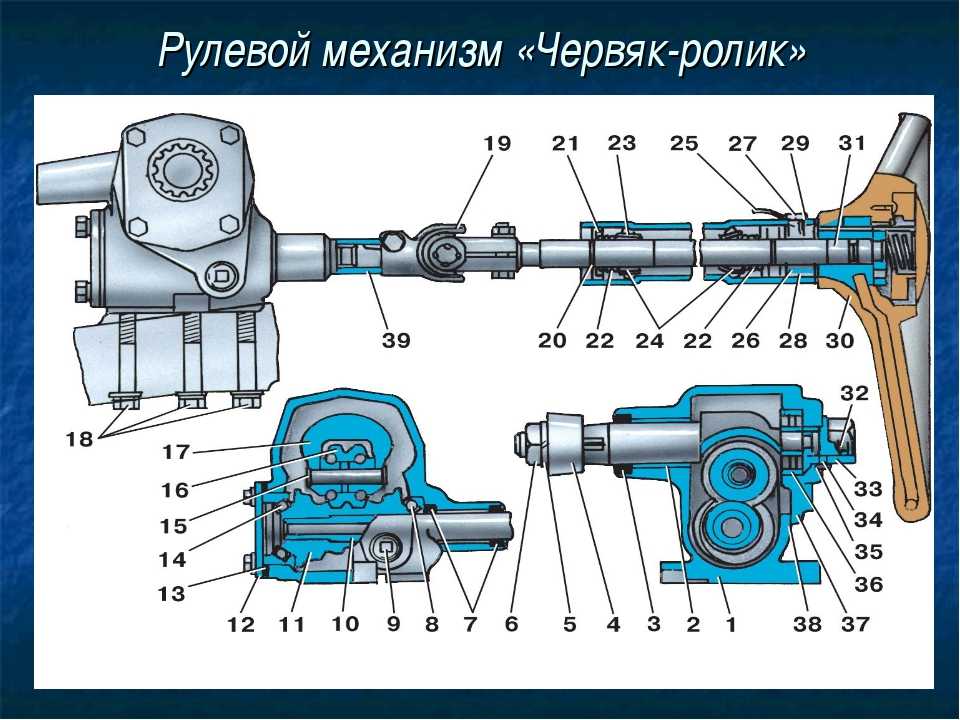
Доступ Действия с рабочей книгой , щелкнув значок «Ресурсы» в левом меню в средстве просмотра.
Содержание
- Передний вопрос
- Проект 1 Подготовка к обслуживанию автомобиля
- Работа 1 — Проведение проверок безопасности и защиты окружающей среды
- Работа 2 — Определение и интерпретация номеров транспортных средств
- Задание 3. Поиск и использование служебной информации
- Задание 4 — использование сканирующего прибора для получения диагностических кодов неисправностей
- Задание 5 — отключить и включить систему подушек безопасности
- Проект 2. Снятие и установка осей CV
- Работа 6 — Снятие, осмотр и повторная установка оси CV
- Работа 7 — Диагностика и техническое обслуживание подшипников и уплотнений полуоси CV
- Проект 3.
 Диагностика и обслуживание. Общие проблемы с рулевым управлением и подвеской.
Диагностика и обслуживание. Общие проблемы с рулевым управлением и подвеской. - Работа 8 — Диагностика проблем с рулевым управлением и подвеской
- Работа 9 — Смажьте рулевое управление и подвеску
- Работа 10 — Обслуживание колесных подшипников
- Работа 11 — Проверка электронных систем рулевого управления и подвески
- Проект 4 Обслуживание системы рулевого управления
- Работа 12 — осмотр рулевой колонки
- Работа 13 — Обслуживание рулевой колонки
- Работа 14 — Осмотр и техническое обслуживание поворотного кулака
- Операция 15. Снятие и замена рулевого механизма с реечной шестерней и внутренних концов поперечной рулевой тяги.
- Операция 16 — Регулировка предварительного натяга подшипника червячной передачи и люфта сектора
- Операция 17 — Удаление и замена компонентов рулевой тяги
- Задание 18. Проверка системы рулевого управления с усилителем
- Работа 19 — Обслуживание компонентов рулевого управления с усилителем
- Работа 20.
 Осмотр и проверка негидравлической системы рулевого управления с электроусилителем
Осмотр и проверка негидравлической системы рулевого управления с электроусилителем
- Проект 5 Обслуживание системы подвески
- Операция 21 — замена стоек стоек, стабилизаторов поперечной устойчивости и втулок.
- Работа 22 — Замена шаровых шарниров, рычагов подвески и втулок
- Работа 23 — Замена винтовых пружин
- Работа 24 — Регулировка и замена торсионов
- Работа 25 — Осмотрите и замените листовые рессоры
- Задание 26. Осмотр и замена компонентов стойки МакФерсон
- Работа 27. Проверка и замена амортизаторов
- Проект 6 Выполнение развал-схождения и шиномонтаж
- Задание 28. Выполнение выравнивания
- Работа 29 — Осмотр шин и дисков
- Работа 30 — Снятие и установка шины на обод; Ремонт прокола шины
- Работа 31 — Поворот и балансировка шин
- Задание 32. Диагностика, ремонт и калибровка системы контроля давления в шинах.

- Условия эксплуатации
- Конфиденциальность
- Поддерживать
СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ С ЭЛЕКТРОПРИВОДОМ С РЕГУЛИРУЕМОЙ ПОЛЯРНОСТЬЮ
Варианты осуществления, раскрытые в данном документе, относятся к узлам и/или системам рулевой колонки с электроусилителем и, в частности, к системам рулевого управления с электронным управлением, имеющим регулируемую полярность.
Надежность и понимание электрических компонентов и механизмов безопасности привели к интеграции технологий в системы, критически важные для безопасности, такие как узлы рулевого управления транспортных средств. Примером одного из таких усовершенствований являются системы рулевого управления с проводным управлением (SbW), в которых вмешательство водителя посредством прямого механического соединения с опорным колесом удалено и заменено линией электрической связи. Эта технология обеспечивает несколько преимуществ, включая свободу упаковки, новые механизмы безопасности и гибкость.
Механическая система рулевого управления по своей сути включает кинематические ограничения для движения вперед и назад. Поворотный кулак транспортного средства и внутренняя кинематика рулевого механизма (особенно для систем рулевого управления с реечной передачей) должны быть спроектированы как согласованная пара, чтобы обеспечить согласованное управление направлением движения. Например, системы рулевого управления с реечной цапфой должны соответствовать соединению шестерни под рейкой с геометрией рулевого управления автомобиля с передним поворотным кулаком (или шестерня над рейкой с рулевым управлением с задним поворотным кулаком), чтобы гарантировать отражение намерений водителя на опорных колесах. При внедрении в сборку транспортного средства механика рулевого управления считается постоянно закрепленной.
Кроме того, во время движения задним ходом в системе с механической связью оператору необходимо использовать реверсивную логику для предполагаемого управления направлением (для поворота заднего транспортного средства против часовой стрелки требуется движение маховика по часовой стрелке).
В соответствии с вариантом осуществления настоящего изобретения система рулевого управления с проводным управлением для транспортного средства включает в себя по меньшей мере один компонент электрической связи, оперативно соединяющий привод маховика с приводом опорного колеса. Также включено то, что, по меньшей мере, один компонент электрической связи может переключаться между назначением первой полярности и назначением второй полярности на основе обнаруженных условий движения транспортного средства, при этом первое назначение полярности поворачивает опорное колесо в первом направлении в ответ на первый ввод. направление вращения привода ручного дублера, при этом второе назначение полярности поворачивает опорное колесо во втором направлении в ответ на первое входное направление вращения привода ручного дублера.
В соответствии с другим вариантом осуществления изобретения система рулевого управления с проводным управлением для транспортного средства включает в себя по меньшей мере один компонент электрической связи, функционально соединяющий привод маховика с приводом опорного колеса.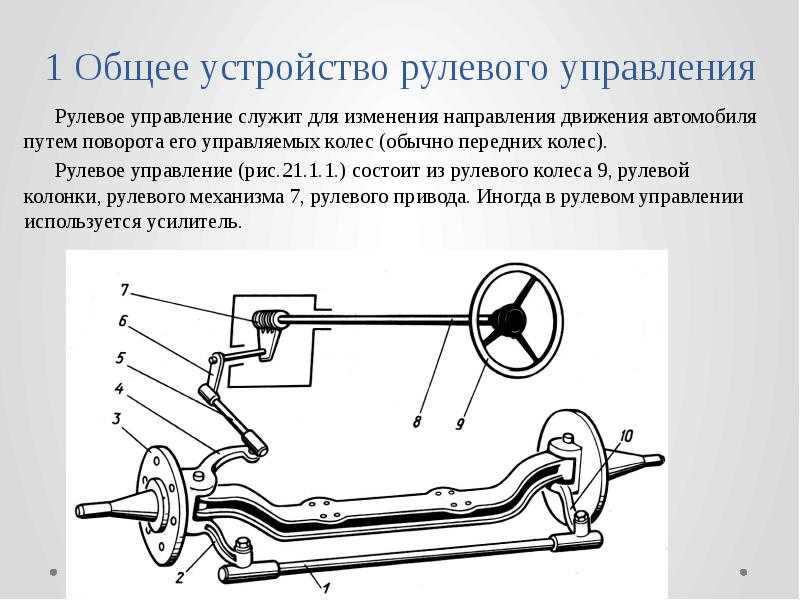 Также включен, по меньшей мере, один компонент электрической связи, переключаемый между множеством назначений полярности на основе обнаруженных условий движения транспортного средства, множество назначений полярности включает первое назначение полярности, второе назначение полярности и третье назначение полярности, причем первое назначение полярности назначение поворота опорного колеса в первом направлении в ответ на первое входное направление вращения привода маховика, когда транспортное средство находится в режиме движения вперед, назначение второй полярности поворота опорного колеса во втором направлении в ответ на первое входное направление вращения привод ручного дублера, когда транспортное средство находится в режиме движения задним ходом без прицепа, назначение третьей полярности поворачивает опорное колесо в первом направлении в ответ на первое входное направление вращения привода ручного дублера, когда транспортное средство находится в режиме движения задним ходом с трейлер.
Также включен, по меньшей мере, один компонент электрической связи, переключаемый между множеством назначений полярности на основе обнаруженных условий движения транспортного средства, множество назначений полярности включает первое назначение полярности, второе назначение полярности и третье назначение полярности, причем первое назначение полярности назначение поворота опорного колеса в первом направлении в ответ на первое входное направление вращения привода маховика, когда транспортное средство находится в режиме движения вперед, назначение второй полярности поворота опорного колеса во втором направлении в ответ на первое входное направление вращения привод ручного дублера, когда транспортное средство находится в режиме движения задним ходом без прицепа, назначение третьей полярности поворачивает опорное колесо в первом направлении в ответ на первое входное направление вращения привода ручного дублера, когда транспортное средство находится в режиме движения задним ходом с трейлер.
Эти и другие преимущества и признаки станут более очевидными из следующего описания, взятого вместе с чертежами.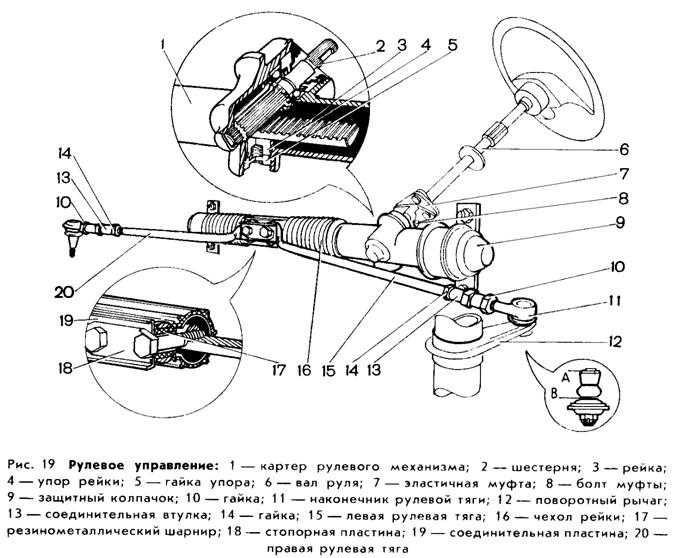
Предмет, рассматриваемый как предмет изобретения, особо указан и четко заявлен в формуле изобретения в конце настоящего описания. Вышеупомянутые и другие признаки и преимущества изобретения очевидны из следующего подробного описания неограничивающих иллюстративных вариантов осуществления изобретения в сочетании с прилагаемыми чертежами, на которых:
РИС. 1 представляет собой схематическую иллюстрацию системы рулевого управления с проводным управлением, работающей в условиях первой полярности согласно аспекту раскрытия во время движения транспортного средства вперед;
РИС. 2 представляет собой схематическую иллюстрацию системы рулевого управления с рулевым управлением, работающей в условиях второй полярности, в соответствии с другим аспектом изобретения во время движения транспортного средства вперед;
РИС. 3 представляет собой схематическую иллюстрацию системы рулевой колонки с рулевым управлением с помощью провода, работающей в условиях второй полярности во время движения транспортного средства задним ходом;
РИС.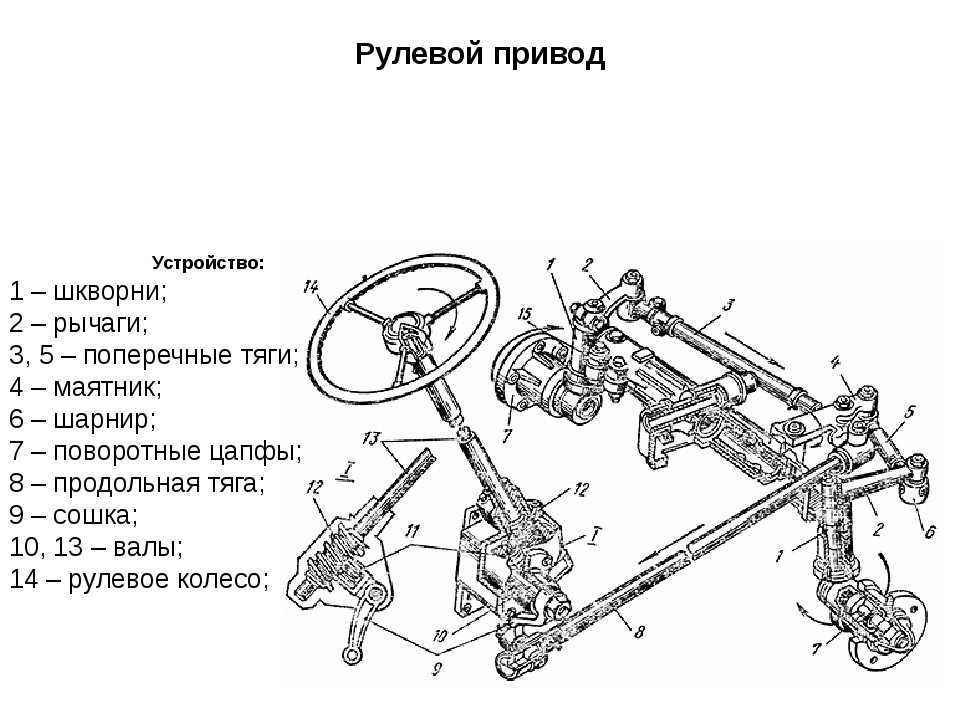 4 представляет собой схематическую иллюстрацию системы рулевой колонки с проводным управлением, работающей в условиях второй полярности, с обеспеченными оптическими компонентами; и
4 представляет собой схематическую иллюстрацию системы рулевой колонки с проводным управлением, работающей в условиях второй полярности, с обеспеченными оптическими компонентами; и
РИС. 5 — схематическая иллюстрация системы управления рулевой колонкой с помощью провода, работающей в условиях первой полярности с прицепом, прикрепленным к транспортному средству.
Ссылаясь теперь на фигуры, где настоящее раскрытие будет описано со ссылкой на конкретные варианты осуществления, не ограничивая их, следует понимать, что раскрытые варианты осуществления являются просто иллюстрацией настоящего раскрытия, которое может быть воплощено в различных и альтернативных вариантах. формы. Цифры не обязательно в масштабе; некоторые функции могут быть преувеличены или сведены к минимуму, чтобы показать детали конкретных компонентов. Следовательно, конкретные структурные и функциональные детали, раскрытые здесь, не должны интерпретироваться как ограничивающие, а просто как репрезентативная основа для обучения специалистов в данной области различным применениям настоящего раскрытия.
Обратимся теперь к фиг. 1 схематически показана система рулевого управления с тросовым управлением, которая в целом обозначена номером 10 . В проиллюстрированном варианте осуществления рулевой штурвал 12 функционально соединен с приводом штурвала 14 через один или несколько валов 16 . Маховик 12 и/или вал(ы) 16 могут упоминаться по отдельности или отдельно как устройство ввода рулевого управления. Привод маховика 14 функционально соединен с первым двигателем 18 , который в некоторых вариантах осуществления является двигателем с активной обратной связью. Первый двигатель 18 электрически связан со вторым двигателем 20 , который функционально соединен с приводом 22 ходового колеса. Привод 22 опорного колеса функционально соединен по меньшей мере с одним опорным колесом 24 через механическую систему. В проиллюстрированном варианте осуществления механическая система представляет собой систему 9 рулевого управления с электроусилителем на основе реечной стойки. 0161 26 , при этом вращение набора шкивов и шарикового винта 28 приводит в движение рейку 30 . Зубчатая рейка 30 функционально соединена с опорным катком(ами) 24 посредством рычажного механизма 32 или аналогичной механической конструкции.
0161 26 , при этом вращение набора шкивов и шарикового винта 28 приводит в движение рейку 30 . Зубчатая рейка 30 функционально соединена с опорным катком(ами) 24 посредством рычажного механизма 32 или аналогичной механической конструкции.
В процессе работы вращение устройства ввода рулевого управления (т. е. маховика/вала) в одном направлении определяется первым двигателем 18 , который имеет электрическую связь со вторым двигателем 20 для отправки сигнала, указывающего на поворот устройства ввода рулевого управления. Второй мотор 20 приводит в движение зубчатую рейку и шестерню, чтобы придать движение опорному колесу(ам) 24 для рулевого управления. Вращение устройства ввода рулевого управления в первом направлении вызывает движение опорного колеса (колес) 24 в первом направлении для выполнения направления рулевого управления транспортного средства в первом направлении. И наоборот, вращение устройства ввода рулевого управления во втором направлении (то есть, противоположном первому направлению вращения) вызывает перемещение опорного колеса (катеров) 24 во втором направлении для выполнения направления рулевого управления транспортного средства во втором направлении.
В вариантах осуществления, описанных в настоящем документе, электрические компоненты (например, первый двигатель 18 и второй двигатель 20 ) имеют назначения полярности, которые можно переключать в зависимости от условий движения транспортного средства. Назначение(я) полярности приводит к гибкости воздействия команд вращения устройства ввода рулевого управления на опорные катки 24 . Гибкость этих эффектов обеспечивает упрощение маневров автомобиля назад, поскольку некоторые водители считают обычные маневры назад неинтуитивными. Кроме того, переключение полярности обеспечивает гибкость и модификацию конструкции, как будет понятно из приведенного здесь описания.
РИС. 2 и 3 показаны различные механические соединения между системой рулевого управления с электроусилителем на основе реечной передачи 26 и опорным колесом (катками) 24 . В частности, фиг. 2 иллюстрирует геометрию управления передним поворотным кулаком, а фиг. 3 иллюстрирует геометрию поворота заднего поворотного кулака. Каждая отдельная геометрия приводит к различному направлению вращения опорного колеса 24 и, следовательно, транспортного средства с одним и тем же направлением вращения, вводимым маховиком 12 . Геометрия механической связи между реечной системой электроусилителя руля 26 и опорное колесо 24 могут быть продиктованы конструктивными соображениями. Следовательно, желательна гибкость для переключения направления вращения между маховиком 12 и ходовым колесом 24 . В варианте осуществления по фиг. 2, вращение маховика 12 и набора шкивов и шарикового винта 28 синхронизировано, так что вращение маховика 12 в показанном направлении по часовой стрелке вызывает вращение набора шкивов и шарикового винта 9.0161 28 по часовой стрелке. Однако в варианте осуществления по фиг. 3, вращение маховика 12 и набора шкивов и шарикового винта 28 асинхронно, так что вращение маховика 12 в показанном направлении по часовой стрелке вызывает вращение набора шкивов и шарикового винта 28 в направление против часовой стрелки.
Каждая отдельная геометрия приводит к различному направлению вращения опорного колеса 24 и, следовательно, транспортного средства с одним и тем же направлением вращения, вводимым маховиком 12 . Геометрия механической связи между реечной системой электроусилителя руля 26 и опорное колесо 24 могут быть продиктованы конструктивными соображениями. Следовательно, желательна гибкость для переключения направления вращения между маховиком 12 и ходовым колесом 24 . В варианте осуществления по фиг. 2, вращение маховика 12 и набора шкивов и шарикового винта 28 синхронизировано, так что вращение маховика 12 в показанном направлении по часовой стрелке вызывает вращение набора шкивов и шарикового винта 9.0161 28 по часовой стрелке. Однако в варианте осуществления по фиг. 3, вращение маховика 12 и набора шкивов и шарикового винта 28 асинхронно, так что вращение маховика 12 в показанном направлении по часовой стрелке вызывает вращение набора шкивов и шарикового винта 28 в направление против часовой стрелки. Переключение между синхронным режимом и асинхронным режимом предусматривает различные места механического соединения между реечной системой рулевого управления с электроусилителем 26 и опорное колесо 24 при повороте опорного колеса 24 и, следовательно, транспортного средства в одном и том же направлении.
Переключение между синхронным режимом и асинхронным режимом предусматривает различные места механического соединения между реечной системой рулевого управления с электроусилителем 26 и опорное колесо 24 при повороте опорного колеса 24 и, следовательно, транспортного средства в одном и том же направлении.
Помимо гибкости механической конструкции, возможность переключения полярности позволяет переключать синхронизацию и асинхронизацию при движении автомобиля вперед и назад. В режиме движения вперед направления вращения устройства ввода рулевого управления и привода опорного колеса синхронизированы на фиг. 2 и асинхронно на фиг. 3, как подробно описано выше. Режим движения вперед может использовать либо синхронизацию, либо асинхронизацию, в зависимости от механического соединения, как описано выше, для осуществления направления поворота транспортного средства в том же направлении вращения, что и устройство ввода рулевого управления. Остальные режимы движения описаны со ссылкой на синхронизированные приводы в режиме движения вперед (например, первый режим движения) в качестве примера, но следует понимать, что может быть выполнено отключение от асинхронных приводов.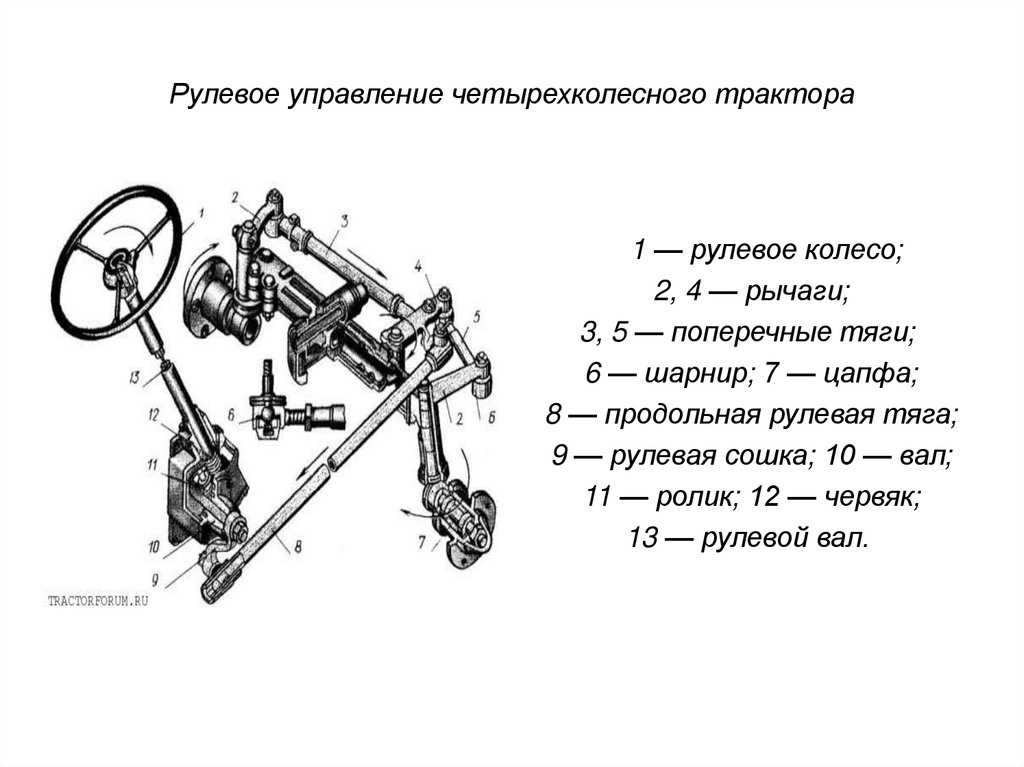
Обратимся теперь к фиг. 4 проиллюстрирован режим движения автомобиля задним ходом. Во время движения назад логика рулевого управления традиционно обратна логике движения вперед. Другими словами, оператор должен повернуть рулевое колесо в одном направлении (например, по часовой стрелке), чтобы маневрировать задним ходом в противоположном направлении вращения (например, против часовой стрелки). Описанные здесь варианты осуществления обеспечивают возможность управления назначением полярности между приводом ручного дублера 14 и привод опорного колеса 22 . В частности, режим движения задним ходом переключает полярность для изменения синхронизированных приводов 14 , 22 на асинхронные приводы.
Система включает в себя человеко-машинный интерфейс (ЧМИ) заднего вида 40 , который предоставляет изображение оператору. HMI 40 в некоторых вариантах осуществления представляет собой заднюю камеру. Глядя на HMI 40 , водитель может маневрировать задним ходом как механизмом заднего поворотного рулевого управления. Другими словами, водитель управляет рулем так, как он обычно использует для движения вперед, с вращением привода маховика 9.0161 14 в одном направлении (например, по часовой стрелке), что приводит к движению автомобиля назад в том же направлении вращения (например, по часовой стрелке). Этому способствует поворот опорных катков 24 в направлении, противоположном тому, в котором они обычно поворачиваются в ответ на вращение рулевого колеса из-за переключателя полярности. Водитель сверху просто смотрит на HMI 40 и управляет рулевым колесом 12 таким же образом, как и при движении вперед.
Другими словами, водитель управляет рулем так, как он обычно использует для движения вперед, с вращением привода маховика 9.0161 14 в одном направлении (например, по часовой стрелке), что приводит к движению автомобиля назад в том же направлении вращения (например, по часовой стрелке). Этому способствует поворот опорных катков 24 в направлении, противоположном тому, в котором они обычно поворачиваются в ответ на вращение рулевого колеса из-за переключателя полярности. Водитель сверху просто смотрит на HMI 40 и управляет рулевым колесом 12 таким же образом, как и при движении вперед.
Обратимся теперь к фиг. 5 проиллюстрирован третий режим вождения. Третий режим движения представляет собой режим движения задним ходом, но с прицепом или другим буксируемым транспортным средством, сцепленным с автомобилем. В этом режиме движения полярность переключается обратно на первую полярность, которая синхронизирует привод маховика 14 с приводом опорного колеса 22 . В этом режиме движения синхронизация между приводом маховика 14 и опорными колесами автомобиля 24 позволяет осуществлять прямое управление и размещение прицепа. В сочетании с этой регулировкой поляризации с ЧМИ 40 заднего вида автомобиль включается в режиме рулевого управления прицепом.
В этом режиме движения синхронизация между приводом маховика 14 и опорными колесами автомобиля 24 позволяет осуществлять прямое управление и размещение прицепа. В сочетании с этой регулировкой поляризации с ЧМИ 40 заднего вида автомобиль включается в режиме рулевого управления прицепом.
Варианты осуществления, раскрытые в данном документе, позволяют переключать поляризацию одного или более электрических компонентов в системе рулевого управления с рулевым управлением для желаемого переключения направления вращения опорных катков 24 в ответ на вращение рулевого колеса 12 . Такая возможность обеспечивает более интуитивное управление водителем в режимах движения автомобиля задним ходом.
Хотя настоящее раскрытие было подробно описано в связи только с ограниченным числом вариантов осуществления, следует легко понять, что настоящее раскрытие не ограничивается такими раскрытыми вариантами осуществления. Скорее, настоящее раскрытие может быть модифицировано для включения любого количества вариаций, изменений, замен или эквивалентных компоновок, не описанных ранее, но соизмеримых по объему с настоящим раскрытием.