|
Заглавная страница
КАТЕГОРИИ: Археология ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрации Техника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ? Влияние общества на человека Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Балочные системы. Определение реакций опор и моментов защемления |
Стр 1 из 5Следующая ⇒ Рулевое управление предназначено для обеспечения движения автомобиля в заданном водителем направлении. На автомобиле Ваз 2108 рулевое управление с реечным рулевым механизмом и демпфирующим элементом на рулевом колесе. Рис.1 Устройство рулевого управления ВАЗ 2108: 1. Наконечник рулевой тяги; 2. Шаровой шарнир наконечника; 3. Поворотный рычаг телескопической стойки; 4. Гайка; 5. Регулировочная тяга; 6. Левая рулевая тяга; 7. Вкладыш шарового шарнира; 8. Шаровой палец; 9. Защитный колпачок: 10. Болты крепления рулевых тяг к рейке; 11. Правая рулевая тяга; 12. Скоба крепления рулевого механизма; 13. Подушка опоры рулевого механизма; 14. Защитный чехол; 15. Соединительная пластина; 16. Стопорная пластина; 17. Картер рулевого механизма; 18. Стяжной болт муфты; 19. Рулевое управление состоит из рулевого механизма и рулевого привода. Рулевой механизм реечного типа. Он крепится в моторном отсеке в сборе с тягами рулевого привода к панели передка кузова двумя скобами . Для гашения вибраций между картером рулевого механизма и панелью, а также на обеих опорах картера, установлены резиновые подушки.   Между собой болты соединяются пластиной. Оба болта проходят через резинаметаллические шарниры, запрессованные в головки наконечников тяг. Фиксируются болты стопорной пластиной, края которой отгибаются на грань головки болтов. Полость картера защищена от загрязнения гофрированным чехлом, который крепится двумя пластмассовыми хомутами, и резиновым колпачком. Вал рулевого управления соединяется с приводной шестерней эластичной муфтой, которая состоит из двух фланцев и резиновой муфты, соединенным между собой заклепками. Отверстия в муфте под заклепки упрочнены кордовыми пучками и металлическими втулками. Верхняя часть вала опирается на шариковый подшипник с пластмассовой втулкой. Подшипник запрессован в трубу кронштейна, который крепится в четырех точках к кронштейну кузова. На верхнем конце вала нарезаны шлицы, на которых через демпфирующий элемент крепится рулевое колесо. Оно выполнено из пластмассы, армированной стальным каркасом. На трубе кронштейна крепится соединитель подрулевого переключателя, а на нижнем торце демпфирующего элемента контактная часть звукового сигнала. Между собой болты соединяются пластиной. Оба болта проходят через резинаметаллические шарниры, запрессованные в головки наконечников тяг. Фиксируются болты стопорной пластиной, края которой отгибаются на грань головки болтов. Полость картера защищена от загрязнения гофрированным чехлом, который крепится двумя пластмассовыми хомутами, и резиновым колпачком. Вал рулевого управления соединяется с приводной шестерней эластичной муфтой, которая состоит из двух фланцев и резиновой муфты, соединенным между собой заклепками. Отверстия в муфте под заклепки упрочнены кордовыми пучками и металлическими втулками. Верхняя часть вала опирается на шариковый подшипник с пластмассовой втулкой. Подшипник запрессован в трубу кронштейна, который крепится в четырех точках к кронштейну кузова. На верхнем конце вала нарезаны шлицы, на которых через демпфирующий элемент крепится рулевое колесо. Оно выполнено из пластмассы, армированной стальным каркасом. На трубе кронштейна крепится соединитель подрулевого переключателя, а на нижнем торце демпфирующего элемента контактная часть звукового сигнала. Рулевой привод состоит из двух поперечных тяг и и поворотных рычагов передних телескопических стоек. Каждая тяга составная, состоит из двух наконечников, соединенных между собой трубчатой тягой. Она навертывается на наконечники и контрится гайками. На левой тяге эти гайки имеют левую резьбу и для отличия прорези на гранях гаек. Такое соединение позволяет изменять длину рулевых тяг, что необходимо при регулировке схождения передних колес. В головку внутреннего наконечника запрессован резинометаллический шарнир, состоящий из резиновой и металлической втулок. Через последнюю проходит болт крепления тяги к рейке рулевого механизма. В головке наружного шарнира расположены детали шарового шарнира, состоящего из вкладыша, шарового пальца, пружины и защитного колпачка. Пластмассовый вкладыш вместе с пальцем постоянно поджимается спиральной пружиной к конической поверхности расточки наконечника. При повороте рулевого колеса усилие прилагаемое водителем передается через рулевой вал на сектор рейки. При его вращении усилие увеличивается и перемещает рейку, к которой, в свою очередь, прикреплены рулевые тяги с наконечниками. Наконечники воздействуют на поворотные кулаки, а те, в свою очередь, передают усилие поворота на стойки амортизаторов. Стойки поворачиваясь на опорах поворачивают поворотные цапфы и колеса в ту или иную сторону в зависимости от направления приложенного усилия.
12345Следующая ⇒ Читайте также: Формы дистанционного обучения Передача мяча двумя руками снизу Значение правильной осанки для жизнедеятельности человека Основные ошибки при выполнении передач мяча на месте |
|
Последнее изменение этой страницы: 2016-08-06; просмотров: 823; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia. |
 Эластичная муфта; 20. Кронштейн крепления рулевой колонки; 21. Рейка; 22. Опорная втулка рейки; 23. Демпфирующие кольца; 24. Резина- металлический шарнир; 25. Верхняя часть облицовочного кожуха; 26. Дампфер рулевого колеса: 27. Рулевое колесо; 28. Шариковый подшипник; 29. Вал рулевого управления; 30. Нижняя часть облицовочного кожуха; 31. Кронштейн крепления вала рулевого управления; 32. Защитный колпачок; 33. Роликовый подшипник; 34. Приводная шестерня; 35. Шариковый подшипник шестерни; 36. Стопорное кольцо; 37. Защитная шайба; 38. Уплотнительное кольцо; 39. Гайка подшипника; 40. Пыльник; 41. Уплотнительное кольцо упора рейки; 42. Стопорное кольцо гайки упора; 43. Гайка упора; 44. Упор рейки; 45. А.Метка на пыльнике; 46. В.Метка на картере рулевого механизма.
Эластичная муфта; 20. Кронштейн крепления рулевой колонки; 21. Рейка; 22. Опорная втулка рейки; 23. Демпфирующие кольца; 24. Резина- металлический шарнир; 25. Верхняя часть облицовочного кожуха; 26. Дампфер рулевого колеса: 27. Рулевое колесо; 28. Шариковый подшипник; 29. Вал рулевого управления; 30. Нижняя часть облицовочного кожуха; 31. Кронштейн крепления вала рулевого управления; 32. Защитный колпачок; 33. Роликовый подшипник; 34. Приводная шестерня; 35. Шариковый подшипник шестерни; 36. Стопорное кольцо; 37. Защитная шайба; 38. Уплотнительное кольцо; 39. Гайка подшипника; 40. Пыльник; 41. Уплотнительное кольцо упора рейки; 42. Стопорное кольцо гайки упора; 43. Гайка упора; 44. Упор рейки; 45. А.Метка на пыльнике; 46. В.Метка на картере рулевого механизма.

 su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь — 161.97.168.212 (0.005 с.)
su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь — 161.97.168.212 (0.005 с.)С этим файлом связано 1 файл(ов). Среди них: Практические электротехника часть 2.pdf. Показать все связанные файлы Подборка по базе: ЛЕКЦИИ — Управление в АПК.pdf, ЗАДАНИЯ ДЛЯ ПРАКТИЧЕСКИХ ЗАНЯТИЙ ПО ДИСЦИПЛИНЕ Корпоративное упр, Практические (ситуационные) задания Управление человеческими рес, Вовлечение родителей в управление образованием является одной из, Практическая работа управление проектом.docx, ведомость по ТБ на стрельбу Управление посл 08.10.doc, 3.1.1. Планирование образовательного процесса и управление им.do, 17.1.1. Лекция 3.1.1. Планирование образовательного процесса и у, Практическое занятие №3 Тема_ Управление памятью.  doc, организация и управление ВЭД.docx doc, организация и управление ВЭД.docx1. Рулевое управление Рулевое управление служит для изменения направления движения автомобиля поворотом передних управляемых колес. Оно состоит из рулевого механизма и рулевого привода. На грузовых автомобилях большой грузоподъемности в рулевом управлении применяют усилитель, который облегчает управление автомобилем, уменьшает толчки на рулевое колесо и повышает безопасность движения. Схема поворота автомобиля Рулевой привод совместно с рулевым механизмом передает управляющее усилие от водителя непосредственно к колесам и обеспечивает этим поворот управляемых колес на задаваемый угол. Чтобы совершить поворот без бокового скольжения колес, все они должны катиться по дугам разной длины, описанным из центра поворота О см. рис. При этом передние управляемые колеса должны поворачиваться на разные углы. Внутреннее по отношению к центру поворота колесо должно поворачиваться на угол альфа-В, наружное — на меньший угол альфа-Н. Это обеспечивается соединением тяг и рычагов рулевого привода в форме трапеции. Основанием трапеции служит балка 1 переднего моста автомобиля, боковыми сторонами являются левый 4 и правый 2 поворотные рычаги, а вершину трапеции образует поперечная тяга 3, которая соединяется с рычагами шарнирно. К рычагам 4 и 2 жестко присоединены поворотные цапфы 5 колес. Один из поворотных рычагов, чаще всего левый рычаг 4, имеет связь с рулевым механизмом через продольную тягу 6. Таким образом, при приведении в действие рулевого механизма продольная тяга, перемещаясь вперед или назад, вызывает поворот обоих колес на разные углы в соответствии со схемой поворота. механизм управление рулевой автомобиль Схемы рулевого управления Поворот управляемых колес происходит при вращении рулевого колеса 3, которое через вал 2 передает вращение рулевой передаче 1. При этом червяк передачи, находящийся в зацеплении с сектором, начинает перемещать сектор вверх или вниз по своей нарезке. Вал сектора приходит во вращение и отклоняет сошку 9, которая своим верхним концом насажена на выступающую часть вала сектора. Управляемые колеса поворачиваются рулевым управлением на ограниченный угол, равный 28-35°. Ограничение вводится для того, чтобы исключить при повороте задевание колесами деталей подвески или кузова автомобиля. Конструкция рулевого управления очень сильно зависит от типа подвески управляемых колес. При зависимой подвеске передних колес в принципе сохраняется схема рулевого управления, приведенная на (рис. а), при независимой подвеске (рис. 6) рулевой привод несколько усложняется. Он обеспечивает поворот управляемых колес с небольшим усилием на рулевом колесе. Ограничение передаточного числа рулевого механизма также связано со свойством обратимости, т. е. способностью передавать обратное вращение через механизм на рулевое колесо. При больших передаточных числах увеличивается трение в зацеплениях механизма, свойство обратимости пропадает и самовозврат управляемых колес после поворота в прямолинейное положение оказывается невозможным. Рулевые механизмы в зависимости от типа рулевой передачи разделяют на: червячные, винтовые, шестеренчатые.  Рулевой механизм с передачей типа червяк — ролик имеет в качестве ведущего звена червяк, закрепленный на рулевом валу, а ролик установлен на роликовом подшипнике на одном валу с сошкой. Чтобы сделать полное зацепление при большом угле поворота червяка, нарезку червяка выполняют по дуге окружности — глобоиде. Такой червяк называют глобоидным. В винтовом механизме вращение винта, связанного с рулевым валом, передается гайке, которая заканчивается рейкой, зацепленной с зубчатым сектором, а сектор установлен на одном валу с сошкой. Такой рулевой механизм образован рулевой передачей типа винт-гайка-сектор. В шестеренчатых рулевых механизмах рулевая передача образуется цилиндрическими или коническими шестернями, к ним же относят передачу типа шестерня-рейка. В последних цилиндрическая шестерня связана с рулевым валом, а рейка, зацепленная с зубьями шестерни, выполняет роль поперечной тяги. Реечные передачи и передачи типа червяк-ролик преимущественно применяют на легковых автомобилях, так как обеспечивают сравнительно небольшое передаточное число. Рулевой привод Рулевой привод предназначен для передачи усилия от рулевого механизма на управляемые колеса, обеспечивая при этом их поворот на неодинаковые углы. Конструкции рулевого привода различаются расположением рычагов и тяг, составляющих рулевую трапецию, по отношению к передней оси. Если рулевая трапеция находится впереди передней оси, то такая конструкция рулевого привода называется передней рулевой трапецией, при заднем расположении — задней трапецией. Большое влияние на конструктивное исполнение и схему рулевой трапеции оказывает конструкция подвески передних колес. При зависимой подвеске рулевой привод имеет более простую конструкцию, так как состоит из минимума деталей. Поперечная рулевая тяга в этом случае сделана цельной, а сошка качается в плоскости, параллельной продольной оси автомобиля. При независимой подвеске передних колес схема рулевого привода конструктивно сложнее. В этом случае появляются дополнительные детали привода, которых нет в схеме с зависимой подвеской колес. Изменяется конструкция поперечной рулевой тяги. Она сделана расчлененной, состоящей из трех частей: основной поперечной тяги 4 и двух боковых тяг — левой 3 и правой 6. Для опоры основной тяги 4 служит маятниковый рычаг 5, который по форме и размерам соответствует сошке 1. Соединение боковых поперечных тяг с поворотными рычагами 2 цапф и с основной поперечной тягой выполнено с помощью шарниров, которые допускают независимые перемещения колес в вертикальной плоскости. Рассмотренная схема рулевого привода применяется главным образом на легковых автомобилях. Рулевой привод, являясь частью рулевого управления автомобиля, обеспечивает не только возможность поворота управляемых колес, но и допускает колебания колес при наезде ими на неровности дороги. Он широко распространен на легковых и грузовых автомобилях. Основными деталями рулевого механизма являются рулевое колесо 4, рулевой вал 5, установленный в рулевой колонке 3 и соединенный с глобоидным червяком 1. Червяк установлен в картере 6 рулевой передачи на двух конических подшипниках 2 и зацеплен с трехгребневым роликом 7, который вращается на шарикоподшипниках на оси. Ось ролика закреплена в вильчатом кривошипе вала 8 сошки, опирающемся на втулку и роликовый подшипник в картере 6. Зацепление червяка и ролика регулируют болтом 9, в паз которого вставлен ступенчатый хвостовик вала сошки. Фиксация заданного зазора в зацеплении червяка с роликом производится фигурной шайбой со штифтом и гайкой. Рулевой механизм автомобиля ГАЗ-53А Рулевой механизм с передачей типа винт — гайка — рейка — сектор с усилителем Его применяют в рулевом управлении автомобиля ЗИЛ-130. Усилитель рулевого управления объединен конструктивно с рулевой передачей в один агрегат и имеет гидропривод от насоса 2, который приводится в действие клиновым ремнем от шкива коленчатого вала. Рулевая колонка 4 соединена с рулевым механизмом 1 через короткий карданный вал 3, так как оси рулевого вала и рулевого механизма не совпадают. Это сделано для уменьшения габаритных размеров рулевого управления. Рулевой механизм автомобиля Устройство рулевого механизма с встроенным гидроусилителем При работающем двигателе насос гидроусилителя подает масло под давлением в гидроусилитель, вследствие чего при совершении поворота усилитель развивает дополнительное усилие, прикладываемое к рулевому приводу. Схема поворота автомобиля Одна из самых важных систем ТС с точки зрения безопасности движения — система рулевого управления, обеспечивающая его движение (поворот) в заданном направлении. В зависимости от конструктивных особенностей колесных ТС различают три способа поворота: -при помощи поворота управляемых колес одной, нескольких или всех осей -созданием разности скоростей неуправляемых колес правого и левого бортов машин (поворот «погусеничному») -взаимным принудительным поворотом звеньев щарнирно-сочлененного ТС Много- или двухзвенные колесные ТС (автопоезда), состоящие из колесного тягача, прицепа (прицепов) или полуприцепа (полуприцепов), осуществляют поворот при помощи управляемых колес только тягача или тягача и прицепного (полуприцепного) звена. Наиболее широкое распространение получили схемы колесных машин с поворотными (управляемыми) колесами. При увеличении числа пар управляемых колес уменьшается минимально возможный радиус поворота машины, т. е, улучшаются маневренные качества ТС. Однако стремление улучшить маневренность за счет применения передних и задних управляемых колес существенно усложняет конструкцию привода управления ими. Максимальный угол повороту управляемых колес обычно не превышает 35 …40°. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами Рис. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами: а, б — передними; в — передними и задними; е, ж — первой и второй осей; з — всех осей Рис. Схемы поворота колесной машины с неуправляемыми колесами: а — с большим радиусом поворота; б — с нулевым радиусом; О — центр поворота; V1, V2 — скорости движения отстающего и забегающего бортов машины Схема поворота «по-гусеничному» принципу используется сравнительно редко и в основном на специальных ТС. Примером может служить колесный тягач с неповоротными колесами и трансмиссией, обеспечивающей поворот тягача практически вокруг его геометрического центра. Такую же схему поворота имеет отечественный луноход, имеющий электромотор-колеса с формулой 8×8. Поворот подобных ТС осуществляется при неодинаковой скорости колес разных бортов машины. Такое управление поворотом наиболее просто обеспечить прекращением подачи вращающего момента на отстающий при повороте борт машины, скорость колес которого уменьшается вследствие их подтормаживания. Чем больше разность скоростей забегающего V2, т.е. внешнего по отношению к центру поворота (точка О), и отстающего V1(внутреннего по отношению к центру поворота) бортов машины, тем меньше радиус ее криволинейного движения. В идеальном случае, если скорости всех колес обоих бортов будут равны, но направлены в противоположные стороны (V2 = -V1), мы получим нулевой радиус поворота, т. Основными недостатками ТС с неуправляемыми колесами являются повышенный расход мощности на совершение поворота и больший износ шин по сравнению с автомобилями, имеющими управляемые колеса. Шарнирносочлененные схемы поворота ТС для инженерных тягачей. Эти машины обладают хорошей маневренностью (минимальный радиус поворота у них меньше, чем у обычных автомобилей с такой же базой и лучшей приспособляемостью к неровностям дороги (из-за наличия шарниров в сцепном устройстве тягача и прицепного звена), а также обеспечивают возможность использования колес большого диаметра, что улучшает проходимость этих ТС. |


 Отклонение сошки передается продольной тяге 8, которая перемещается вдоль своей оси. Продольная тяга 8 связана через верхний рычаг 7 с поворотной цапфой 4, поэтому ее перемещение вызывает поворот левой поворотной цапфы. От нее усилие поворота через нижние рычаги 5 и поперечную тягу 6 передается правой цапфе. Таким образом происходит поворот обоих колес.
Отклонение сошки передается продольной тяге 8, которая перемещается вдоль своей оси. Продольная тяга 8 связана через верхний рычаг 7 с поворотной цапфой 4, поэтому ее перемещение вызывает поворот левой поворотной цапфы. От нее усилие поворота через нижние рычаги 5 и поперечную тягу 6 передается правой цапфе. Таким образом происходит поворот обоих колес. Это может быть достигнуто за счет увеличения передаточного числа рулевого механизма. Однако передаточное число ограничено количеством оборотов рулевого колеса. Если выбрать передаточное число с количеством оборотов рулевого колеса больше 2-3, то существенно увеличивается время, требуемое на поворот автомобиля, а это недопустимо по условиям движения. Поэтому передаточное число в рулевых механизмах ограничивают в пределах 20-30, а для уменьшения усилия на рулевом колесе в рулевой механизм или привод встраивают усилитель.
Это может быть достигнуто за счет увеличения передаточного числа рулевого механизма. Однако передаточное число ограничено количеством оборотов рулевого колеса. Если выбрать передаточное число с количеством оборотов рулевого колеса больше 2-3, то существенно увеличивается время, требуемое на поворот автомобиля, а это недопустимо по условиям движения. Поэтому передаточное число в рулевых механизмах ограничивают в пределах 20-30, а для уменьшения усилия на рулевом колесе в рулевой механизм или привод встраивают усилитель.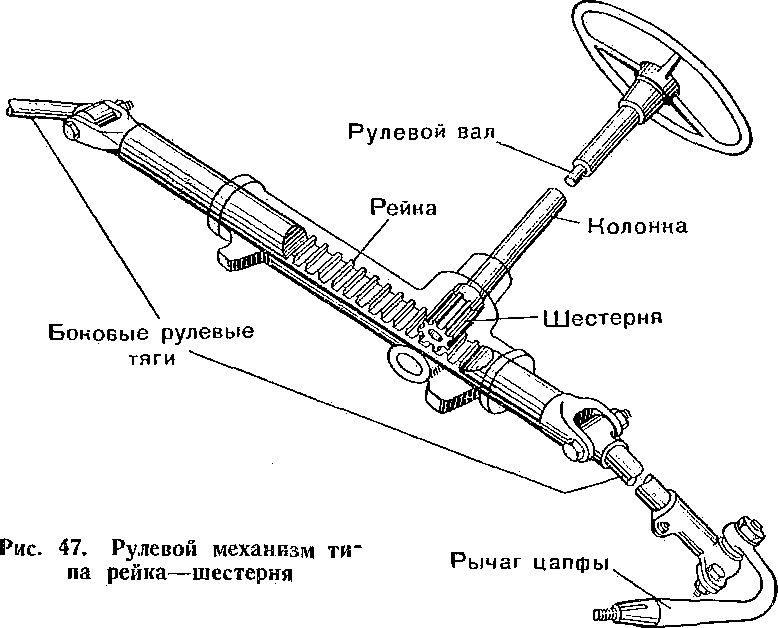 Для грузовых автомобилей используют рулевые передачи типа червяк-сектор и винт-гайка-сектор, снабженные либо встроенными в механизм усилителями, либо усилителями, вынесенными в рулевой привод.
Для грузовых автомобилей используют рулевые передачи типа червяк-сектор и винт-гайка-сектор, снабженные либо встроенными в механизм усилителями, либо усилителями, вынесенными в рулевой привод. Можно сделать привод и с сошкой, качающейся в плоскости, параллельной переднему мосту. Тогда продольная тяга будет отсутствовать, а усилие от сошки передается прямо на две поперечные тяги, связанные с цапфами колес.
Можно сделать привод и с сошкой, качающейся в плоскости, параллельной переднему мосту. Тогда продольная тяга будет отсутствовать, а усилие от сошки передается прямо на две поперечные тяги, связанные с цапфами колес. При этом детали привода получают относительные перемещения в вертикальной и горизонтальной плоскостях и на повороте передают усилия, поворачивающие колеса. Соединение деталей при любой схеме привода производят с помощью шарниров шаровых либо цилиндрических.
При этом детали привода получают относительные перемещения в вертикальной и горизонтальной плоскостях и на повороте передают усилия, поворачивающие колеса. Соединение деталей при любой схеме привода производят с помощью шарниров шаровых либо цилиндрических.
 Гайка имеет внутреннюю нарезку в виде полукруглой канавки, куда заложены шарики 4. Посредством шариков гайка зацеплена с винтом 2, который, в свою очередь, соединен с рулевым валом 5. В верхней части картера к нему крепится корпус 6 клапана управления гидроусилителем. Управляющим элементом в клапане является золотник 7. Исполнительным механизмом гидроусилителя служит поршень — рейка 10, уплотненный в цилиндре картера с помощью поршневых колец. Рейка поршня соединена нарезкой с зубчатым сектором 9 вала 8 сошки.
Гайка имеет внутреннюю нарезку в виде полукруглой канавки, куда заложены шарики 4. Посредством шариков гайка зацеплена с винтом 2, который, в свою очередь, соединен с рулевым валом 5. В верхней части картера к нему крепится корпус 6 клапана управления гидроусилителем. Управляющим элементом в клапане является золотник 7. Исполнительным механизмом гидроусилителя служит поршень — рейка 10, уплотненный в цилиндре картера с помощью поршневых колец. Рейка поршня соединена нарезкой с зубчатым сектором 9 вала 8 сошки.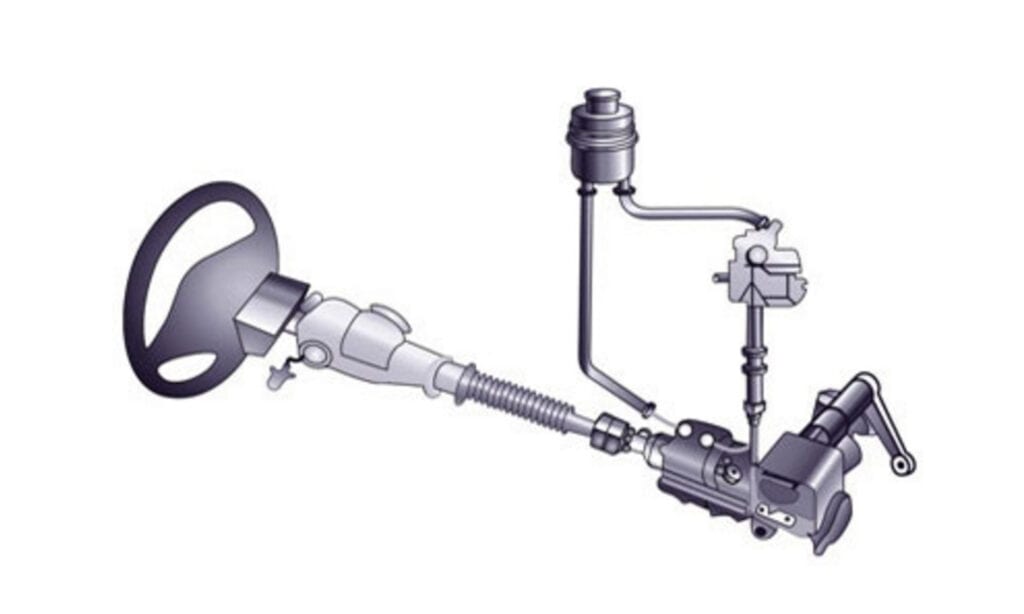 Принцип действия усилителя основан на использовании давления масла на торцы поршня — рейки, которое создает дополнительную силу, передвигающую поршень и облегчающую поворот управляемых колес. [ 1 ]
Принцип действия усилителя основан на использовании давления масла на торцы поршня — рейки, которое создает дополнительную силу, передвигающую поршень и облегчающую поворот управляемых колес. [ 1 ]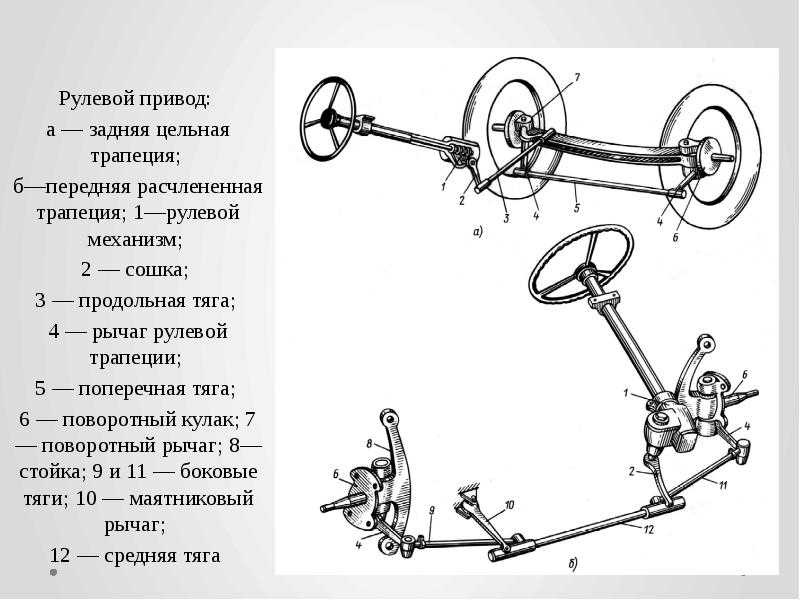
 Чем больше угол их поворота относительно продольной оси машины, тем меньше радиус поворота ТС.
Чем больше угол их поворота относительно продольной оси машины, тем меньше радиус поворота ТС. е. машина будет поворачиваться вокруг своего геометрического центра.
е. машина будет поворачиваться вокруг своего геометрического центра.Техническое обслуживание и ремонт рулевого управления
Техническое обслуживание механизмов рулевого управления носит плановый характер. Объем выполняемых работ определяется видом технического обслуживания. В процессе ежедневного технического обслуживания необходимо проверять свободный ход рулевого колеса, состояние креплений сошки, а также ограничителей максимальных углов поворота управляемых колес. Кроме этого необходимо ежедневно проверять зазор в шарнирах гидроусилителя и в рулевых тягах, а также работу гидроусилителя и рулевого управления. Эти проверки выполняют при работающем двигателе.
Кроме этого необходимо ежедневно проверять зазор в шарнирах гидроусилителя и в рулевых тягах, а также работу гидроусилителя и рулевого управления. Эти проверки выполняют при работающем двигателе.
В процессе первого технического обслуживания (ТО-1) необходимо проверять крепление и шплинтовку гаек сошек, шаровых пальцев, рычагов поворотных цапф; свободный ход рулевого колеса и шарниров рулевых тяг; состояние шкворней и стопорных шайб; затяжку гаек, клиньев карданного вала рулевого управления; герметичность системы усиления рулевого управления, а также уровень смазочного материала в бачке гидроусилителя, при необходимости доливают его.
В процессе ТО-2 выполняют те же работы, что и при ТО-1, а также проверяют углы установки передних колес и при необходимости выполняют их регулировку; проверяют и при необходимости подтягивают крепление клиньев шкворней, картера рулевого механизма, рулевой колонки рулевого колеса; зазоры рулевого управления, шарниров рулевых тяг и шкворневых соединений; состояние и крепление карданного вала рулевого управления; крепление и герметичность узлов и деталей гидроусилителя рулевого управления.
При сезонном техническом обслуживании выполняют работы ТО-2, а также осуществляют сезонную замену смазочного материала.
Визуальный контроль технического состояния деталей, агрегатов и механизмов рулевого управления выполняют путем осмотра и опробования. Если доступ к деталям рулевого управления невозможен сверху, то осмотр можно проводить над смотровой ямой.
Контроль крепления колонки и рулевого механизма осуществляется путем приложения усилий во всех направлениях. В процессе такой проверки не допускается осевое перемещение или качение рулевого колеса, колодки, а также присутствие стука в узлах рулевого управления.
При проверке креплений картера рулевого механизма, а также рычагов поворотных цапф необходимо поворачивать рулевое колесо около нейтрального положения на 40-50° в каждую сторону. Состояние рулевого привода, а также надежность крепления соединений проверяют при помощи приложения знакопеременной нагрузки непосредственно к деталям привода. Работа ограничителей поворота проверяется визуально при повороте управляемых колес в разные стороны до упора.
Для того чтобы проверить герметичность соединений системы гидроусилителя рулевого привода, необходимо удерживать рулевое колесо в крайних положениях при работающем двигателе. Кроме этого проверку герметичности соединений системы гидроусилителя осуществляют в свободном положении рулевого колеса. Соединения считаются герметичными, если отсутствует протекание смазочного материала. Кроме этого при проверке не допускается самопроизвольный поворот рулевого колеса с гидроусилителем рулевого привода от нейтрального положения к крайним или наоборот.
Силу трения, а также свободный ход рулевого колеса проверяют при помощи специального прибора, который состоит из динамометра и люфтомера. Люфтомер включает в себя шкалу, которая крепится на динамометре, и указательную стрелку, которая закрепляется на рулевой колодке при помощи зажимов. Динамометр крепится к ободу рулевого колеса при помощи зажимов. На рукоятке прибора располагается шкала динамометра. При измерении люфта рулевого колеса к рукоятке прибора прикладывают усилие 10 Н, которое действует в обе стороны. После этого стрелка прибора показывает суммарную величину люфта. Для легковых автомобилей суммарная величина люфта должна находиться в пределах 10°, а для грузовых автомобилей — в пределах 20°. На автомобилях, оснащенных гидроусилителем, люфт определяют при работающем двигателе.
После этого стрелка прибора показывает суммарную величину люфта. Для легковых автомобилей суммарная величина люфта должна находиться в пределах 10°, а для грузовых автомобилей — в пределах 20°. На автомобилях, оснащенных гидроусилителем, люфт определяют при работающем двигателе.
Общую силу трения определяют при полностью вывешенных передних колесах. Если рулевое управление правильно отрегулировано, то колесо должно свободно поворачиваться от среднего положения для движения по прямой при усилии в 8-16 Н.
Состояние шарниров рулевых тяг оценивают визуально, прилагая усилия к рулевому колесу. Люфт в шарнирах проявляется во взаимном относительном перемещении соединяемых деталей.
Проверку усилителя рулевого управления осуществляют путем измерения давления в системе гидроусилителя. Для проверки необходимо вставить в нагнетательную магистраль манометр с краном. Замеры давления производят при работающем двигателе на малых оборотах, поворачивая колеса в крайние положения. Давление, которое развивает насос гидравлического усилителя, должно быть не менее 6 МПа. Если давление меньше 6 МПа, то необходимо закрыть кран, после этого давление должно подняться до 6,5 МПа. Если после закрытия крана давление не поднимается, значит, произошла поломка насоса, который необходимо отремонтировать или заменить на новый.
Давление, которое развивает насос гидравлического усилителя, должно быть не менее 6 МПа. Если давление меньше 6 МПа, то необходимо закрыть кран, после этого давление должно подняться до 6,5 МПа. Если после закрытия крана давление не поднимается, значит, произошла поломка насоса, который необходимо отремонтировать или заменить на новый.
Регулировочные работы по рулевому механизму включают в себя работы по регулировке осевого зазора в зацеплении, а также в подшипниках вала винта.
Рулевой механизм считается исправным и пригодным для дальнейшего применения, если люфт рулевого колеса при движении по прямой не превышает 10°. Если люфт превышает допустимые значения, то необходимо проверить зазор в подшипниках вала винта. Если в подшипниках имеется достаточно большой зазор, то осевой люфт будет легко ощущаться.
Для того чтобы устранить люфт в подшипниках вала, необходимо отвернуть болты, снять крышку картера рулевого механизма и затем удалить одну регулировочную прокладку. После удаления прокладки необходимо снова выполнить проверку осевого люфта. Операцию необходимо повторять до тех пор, пока усилие на поворот руля не будет составлять 3-6 Н.
Операцию необходимо повторять до тех пор, пока усилие на поворот руля не будет составлять 3-6 Н.
Регулировку зацепления винта (червяка) с роликом регулируют без снятия рулевого механизма. Для этого необходимо отвернуть гайку со штифта вала винта, затем снять шайбу со штифта, после этого при помощи специального ключа поворачивают регулировочный винт на несколько вырезов в стопорной шайбе. В результате этого происходит изменение величины бокового зазора в зацеплении, что, в свою очередь, изменяет свободный ход рулевого колеса.
Для того чтобы определить величину люфта в сочленениях рулевого привода, необходимо резко покачивать сошку руля при повороте рулевого колеса. После проверки при необходимости подтягивают резьбовую пробку. Кроме этого при проверке осевого люфта в сочленения добавляют смазку, а при большом износе производят замену шарового пальца или всей тяги в сборе.
К основным неисправностям системы управления относятся: обломы и трещины на фланце крепления картера, износ отверстия в картере под втулку вала рулевой сошки и деталей шаровых соединений рулевых тяг; износ червяка и ролика вала сошки втулок, подшипников и мест их посадки; изгиб тяг и ослабление крепления рулевого колеса на валу.
При значительном износе рабочей поверхности или при отслоении закаленного слоя червяк рулевого колеса заменяют на новый. При наличии трещин на поверхности ролика вала его меняют на новый. Червяк и ролик необходимо заменять одновременно.
Изношенные шейки вала сошки восстанавливают при помощи хромирования и последующего шлифования под ближайший ремонтный размер. Шейку вала можно восстановить при помощи шлифования бронзовых втулок, устанавливаемых в картере, под ближайший ремонтный размер.
Изношенные места посадки подшипников в картере рулевого управления можно восстановить при помощи дополнительной втулки. Втулка запрессовывается в изношенное место посадки подшипника, затем втулка растачивается под рабочий размер подшипника.
Обломы и трещины на фланце крепления картера можно устранить при помощи варки газовым пламенем. Изношенное отверстие в картере растачивается под ремонтный размер.
Кроме этого быстрому износу подвержены шаровые пальцы и вкладыши поперечной рулевой тяги.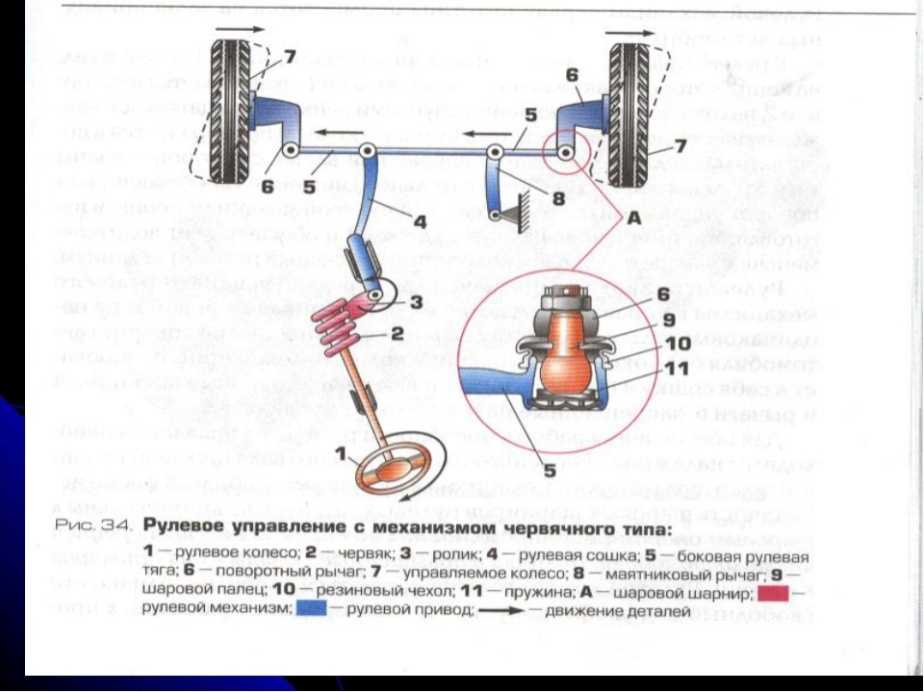 На концах поперечных рулевых тяг часто возникает срыв резьбы. Кроме этого в процессе эксплуатации появляется ослабление или поломка пружин, а также нарушение изгиба тяг.
На концах поперечных рулевых тяг часто возникает срыв резьбы. Кроме этого в процессе эксплуатации появляется ослабление или поломка пружин, а также нарушение изгиба тяг.
Изношенные шаровые пальцы, которые имеют сколы или задиры, необходимо заменить на новые. Одновременно с заменой шаровых пальцев осуществляется замена их вкладышей. Сломанные или ослабленные пружины не подлежат восстановлению и заменяются на новые. Нарушение изгиба тяг устраняется правкой тяги в холодном состоянии.
Основными неисправностями гидравлического усилителя являются отсутствие усиления при любых частотах вращения коленчатого вала двигателя, а также неравномерное или недостаточное усиление при повороте рулевого колеса в обе стороны.
Для того чтобы устранить неисправности системы гидравлического усиления, необходимо слить из системы масло, тщательно промыть составляющие ее детали, а также разобрать насос.
Последовательность разборки насоса гидравлического усиления следующая:
1) снять крышку бачка и фильтра;
2) удерживая предохранительный клапан от выпадения, необходимо снять бачок с корпуса насоса;
3) снять распределительный диск;
4) снять статор, предварительно отметив его положение относительно распределительного диска и корпуса насоса;
5) снять ротор в сборе с лопастями.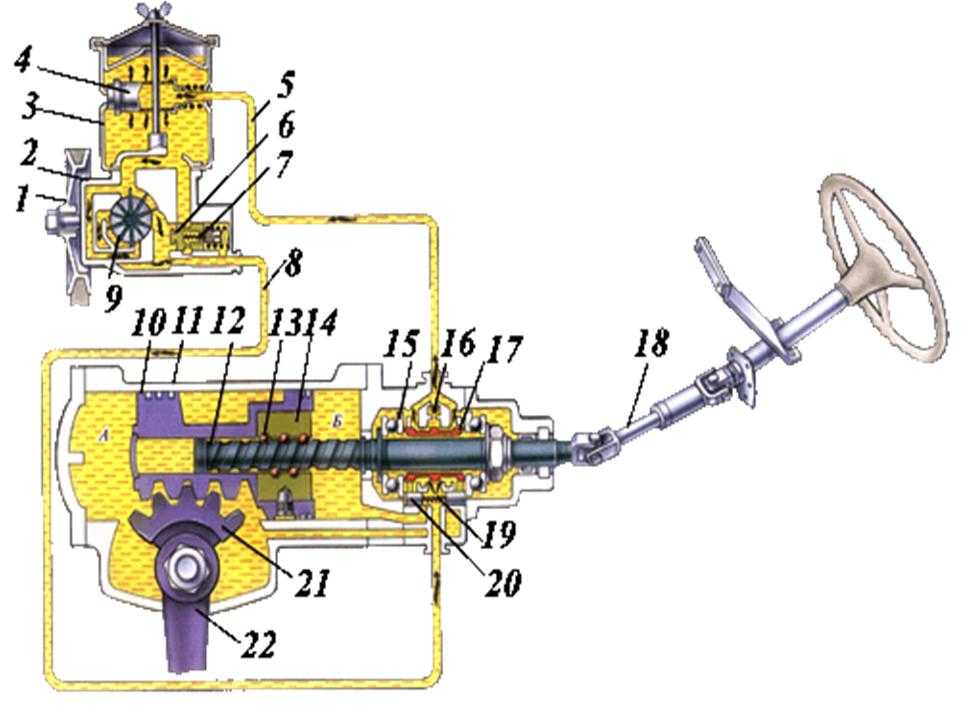
Кроме этого при ремонте насоса гидравлического усиления необходимо снять шкив, стопорное кольцо и вал насоса с передним подшипником.
Детали насоса необходимо промыть раствором, обмыть водой и затем обдуть сжатым воздухом.
При техническом обслуживании необходимо проверять свободное перемещение перепускного клапана в крышке насоса, а также отсутствие задиров или износа на торцевых поверхностях ротора, корпуса и распределительного вала.
После проверки, устранения неполадок и сборки насос необходимо проверить на стенде. Рулевой механизм после проверки, ремонта и контроля деталей собирают, регулируют и испытывают с гидравлическим усилителем в сборе.
Кроме этого из-за неполадок в системе рулевого управления может возникать стук в процессе движения, неустойчивое движение автомобиля, а также тяжелый поворот рулевого колеса.
В том случае, если рулевое колесо туго вращается, необходимо проверить давление в шинах передних колес. Другой причиной туго вращающегося рулевого колеса может быть деформация деталей рулевого привода. В этом случае следует проверить, не согнуты ли рулевые тяги и поворотные рычаги, и заменить деформированные детали.
В этом случае следует проверить, не согнуты ли рулевые тяги и поворотные рычаги, и заменить деформированные детали.
При тугом повороте рулевого колеса также следует проверить уровень масла в картере рулевого механизма и при необходимости долить его до нормы. Если при проверке обнаруживается неисправный сальник, его необходимо заменить на новый. Кроме этого в некоторых случаях причиной тугого вращения рулевого колеса на морозе является загустевание трансмиссионного масла. Необходимо проверить шаровые шарниры рулевых тяг, перемещая наконечники тяг вдоль оси пальцев. Для проверки при помощи рычага и опоры перемещают наконечник параллельно оси пальцев. Если вкладыш пальца не заклинило в гнезде наконечника тяги, от осевое перемещение наконечника относительно пальца составляет 1-1,5 мм, если вкладыш заклинило, то его необходимо заменить вместе с вкладышем.
Кроме того, рулевое колесо может туго вращаться после ремонта маятникового рычага. Это может возникнуть из-за перетянутой регулировочной гайки при замене втулок или оси маятникового рычага. Если гайка затянута неправильно, то маятниковый рычаг будет вращаться в горизонтальном положении под действием собственной массы. Если гайка затянута правильно, то рычаг будет поворачиваться только под действием силы, приложенной к его концу.
Если гайка затянута неправильно, то маятниковый рычаг будет вращаться в горизонтальном положении под действием собственной массы. Если гайка затянута правильно, то рычаг будет поворачиваться только под действием силы, приложенной к его концу.
В том случае, если гайка перетянута, то необходимо ее отвернуть, затем приподнять шайбу и снова затянуть гайку. После того как затяжение гайки исправлено, нужно соединить шаровые пальцы тяг с рычагом.
Если в рулевом механизме нет неполадок, то проблема заключается в установке углов передних колес. Установку передних колес необходимо проверять после ремонта или замены деталей передней подвески, а также после поездки по неровной дороге. Однако необходимо учитывать, что точную регулировку углов передних колес могут произвести только на станции технического обслуживания.
Стуки передней подвески во время движения, колебания передних колес, затрудненное управление автомобилем могут появиться в результате увеличения зазоров в соединении деталей рулевого управления из-за износа деталей, ослабления затяжки гаек крепления Наконечников или шаровых пальцев. Для того чтобы устранить зазоры, необходимо подтянуть гайки шаровых пальцев рулевых тяг, регулировочную гайку оси маятникового рычага, гайки шаровых пальцев поворотных рычагов, а также болты крепления рулевого механизма, кронштейна маятникового рычага. Кроме этого для устранения шума нужно отрегулировать зацепление ролика с червяком или подшипников червяка.
Для того чтобы устранить зазоры, необходимо подтянуть гайки шаровых пальцев рулевых тяг, регулировочную гайку оси маятникового рычага, гайки шаровых пальцев поворотных рычагов, а также болты крепления рулевого механизма, кронштейна маятникового рычага. Кроме этого для устранения шума нужно отрегулировать зацепление ролика с червяком или подшипников червяка.
При резком ухудшении устойчивости автомобиля необходимо остановиться и проверить крепления картера рулевого управления, кронштейна маятникового рычага, кронштейна вала рулевой колонки к кузову, а также затяжку гаек крепления шаровых пальцев.
Если в процессе движения руль автомобиля «тянет» в сторону, то проблема, скорее всего, в падении давления в одном из передних колес, поэтому автомобиль отклоняется в его сторону. При падении давления в одном из задних колес автомобиль даже на небольшой скорости начинает водить то в одну сторону, то в другую.
Если автомобиль постоянно отклоняется в одну сторону, то причиной этого может быть деформация поворотной цапфы или поворотного рычага из-за быстрого движения по неровной дороге. При этом происходит постоянный занос автомобиля. Для проверки технического состояния цапфы и рычагов необходимо обратиться на станцию технического обслуживания. Если эти детали деформированы настолько, что их невозможно восстановить, то эти детали необходимо заменить на новые.
При этом происходит постоянный занос автомобиля. Для проверки технического состояния цапфы и рычагов необходимо обратиться на станцию технического обслуживания. Если эти детали деформированы настолько, что их невозможно восстановить, то эти детали необходимо заменить на новые.
(DOCX) Power Steering Assignment — PDFSLIDE.NET 344 х 292429 х 357514 х 422599 х 487
Текст ГУР Назначение
ГУР
Yogeesh Sharma 1282, 7 MAE -2 A2305407096
Введение ГУР дорожный (или правильнее всего
ГУР
автомобилей с усилителем рулевого управления) представляет собой механизм, помогающий
водитель автомобиля в рулевом управлении, направляя часть
способность транспортного средства перемещаться по оси одного или нескольких колес.
На большинстве дорожных транспортных средств должна быть механическая связь, т.к.
отказоустойчивый. Первоначально изобретенный в начале 20 века,
автомобильные инженеры реализовали эту стандартную функцию
с разнообразными технологиями. В большинстве автомобилей он основан на
гидравлическая система, помогающая поворачивать колеса автомобиля. Сила
рулевое управление является стандартной функцией почти каждого современного автомобиля и
грузовая машина.
В большинстве автомобилей он основан на
гидравлическая система, помогающая поворачивать колеса автомобиля. Сила
рулевое управление является стандартной функцией почти каждого современного автомобиля и
грузовая машина.
История гидроусилителя руляСамый ранний известный патент, относящийся к
гидроусилитель руля был разработан Фредериком В. Ланчестером в Великобритании, в
Февраль 1902 г. Его изобретение заключалось в том, чтобы «заставить рулевой механизм
приводиться в действие гидравлической силой». Р. Э. Твайфорд включил
механизм рулевого управления с механическим усилителем как часть его патента на
первый полный привод (патент США 646 477 от 3 апреля 1900 г.).
следующий дизайн был зарегистрирован в Патентном ведомстве США в августе.
30 января 1932 года, Клара Гайлис из Белмонта, Массачусетс. Есть
другой изобретатель, которому приписывают изобретение гидроусилителя руля.
имя Чарльза Ф. Хаммонда, американца, родившегося в Детройте, который
подали аналогичные патенты, первый из которых был зарегистрирован
Канадское ведомство интеллектуальной собственности. Фрэнсис В. Дэвис,
инженер отдела грузовых автомобилей Пирс Эрроу начал исследовать, как
рулевое управление можно было сделать проще, а в 1926 продемонстрировал первый
система гидроусилителя руля. Дэвис перешел в General Motors и усовершенствовал
система рулевого управления с гидроусилителем, но автопроизводитель
подсчитано, что это будет слишком дорого для производства. Затем Дэвис подписал
с Bendix, производителем запчастей для автопроизводителей. Военные нужды
во время Второй мировой войны для облегчения рулевого управления на тяжелых транспортных средствах был усилен
необходимость силовой помощи на броневиках и танках-эвакуаторах
техники для британской и американской армий. Корпорация Крайслер
представила первый коммерчески доступный легковой автомобиль мощностью
система рулевого управления на 1951 Chrysler Imperial под названием
«Гидрагайд». Система Chrysler была основана на некоторых просроченных
патенты Дэвиса. General Motors представила Cadillac 1952 года с
система гидроусилителя руля, использующая работу, которую Дэвис проделал для компании
почти двадцать лет назад.
Типы усилителя руляДва основных типа усилителя руля механизмы: 1. Гидравлический усилитель руля 2. Электронный усилитель Рулевое управление
Гидравлический усилитель руляГидравлический усилитель руля (HPS) представляет собой гидравлическая система для снижения усилия на рулевом колесе на транспортных средствах за счет использование гидравлического давления для облегчения поворота колес. это предназначен для облегчения управления направлением движения автомобиля при сохранении «обратной связи», стабильности и однозначности указана траектория. Усилитель руля устроен так, что в случае отказа усилителя рулевое управление продолжит работать (хотя колесо будет тяжелее). усилитель руля состоит из следующих основных элементов: y y y y y Управляющий момент детектор Корпус распределителя регулируемого давления Гидроусилитель насос Бак с рабочей жидкостью Шланги подключения
Рабочая жидкость, также называемая «гидравлической жидкостью» или «маслом»,
среда, через которую передается давление. Общие рабочие жидкости
основаны на минеральном масле.
Общие рабочие жидкости
основаны на минеральном масле.
Гидравлический привод рулевого управления обеспечивается вращающимся лопастью
насос. Этот насос приводится в движение двигателем автомобиля через ремень и
шкив. Он содержит набор выдвижных лопастей, которые вращаются внутри
овальная камера. Когда лопасти вращаются, они вытягивают гидравлическую жидкость из
обратку при низком давлении и нагнетать в выход при высоком
давление. Производительность насоса зависит от
обороты двигателя автомобиля. Насос должен быть спроектирован таким образом, чтобы обеспечивать достаточную
поток при работе двигателя на холостом ходу. В результате насос перемещается значительно
больше жидкости, чем необходимо, когда двигатель работает на более высокой
скорости. В насосе есть клапан сброса давления, чтобы убедиться, что
давление не поднимается, особенно на высоком двигателе
скорости, когда перекачивается так много жидкости. Система рулевого управления с усилителем
должны помогать водителю только тогда, когда он прилагает силу к
руль (например, при начале поворота). Когда водитель
без приложения силы (например, при движении по прямой),
система не должна оказывать никакой помощи. Устройство, воспринимающее
усилие на рулевом колесе называется поворотным клапаном. Ключ к
поворотный клапан представляет собой торсион. Торсион представляет собой тонкий стержень
металл, который скручивается при приложении к нему крутящего момента. Верхняя часть бара
соединен с рулевым колесом, а нижняя часть руля
соединен с шестерней или червячной передачей (которая вращает колеса), поэтому
количество крутящего момента в торсионе равно количеству
крутящий момент, который водитель использует для поворота колес. Чем больше крутящий момент
водитель использует до
Когда водитель
без приложения силы (например, при движении по прямой),
система не должна оказывать никакой помощи. Устройство, воспринимающее
усилие на рулевом колесе называется поворотным клапаном. Ключ к
поворотный клапан представляет собой торсион. Торсион представляет собой тонкий стержень
металл, который скручивается при приложении к нему крутящего момента. Верхняя часть бара
соединен с рулевым колесом, а нижняя часть руля
соединен с шестерней или червячной передачей (которая вращает колеса), поэтому
количество крутящего момента в торсионе равно количеству
крутящий момент, который водитель использует для поворота колес. Чем больше крутящий момент
водитель использует до
подросток шляпа nne ata The nut a ea y. Это не так t конец t n a . The tt the t n nnet t the ute at the a e. t n a tu n the ut the teen nea , nne t n te the n nea ea de end n n h h ty e teen n the a ha .
в т ут де. n the teen tat n de end n hee.
t , t tate the n de the a e e at the e the nne at the a e a
Nneted that (и e e teen hee ), тетя et een the
nne and ute at a ehuh t que the de a e t the teen heen t
entuned, th hyd auunt eue t the teen ea . но не то ,
t en u t the ate ne
но не то ,
t en u t the ate ne
hen the teen de the a a e a e a e tuned h h h e u e ud t
tun the he , the
e the at
t.
ne the de
Ele t n»!»!
e
тройник n’ $ $ % & ! !! $
В традиционных системах рулевого управления с усилителем используется ремень привода вспомогательных агрегатов
управлять щенком, обеспечивая жидкость под давлением, которая работает
поршень в рулевом механизме с гидроусилителем или исполнительном механизме для помощи водителю.
При электрогидравлическом рулевом управлении одно рулевое управление с электроприводом
В концепции используется высокоэффективная кукла, приводимая в движение электродвигателем.
Скорость насоса регулируется электрическим контроллером для изменения насоса.
давления и расхода, обеспечивая усилие рулевого управления с учетом
различные дорожные ситуации. Насос может работать на низкой скорости или
отключается для экономии энергии при движении прямо
(что чаще всего происходит на большинстве мировых рынков).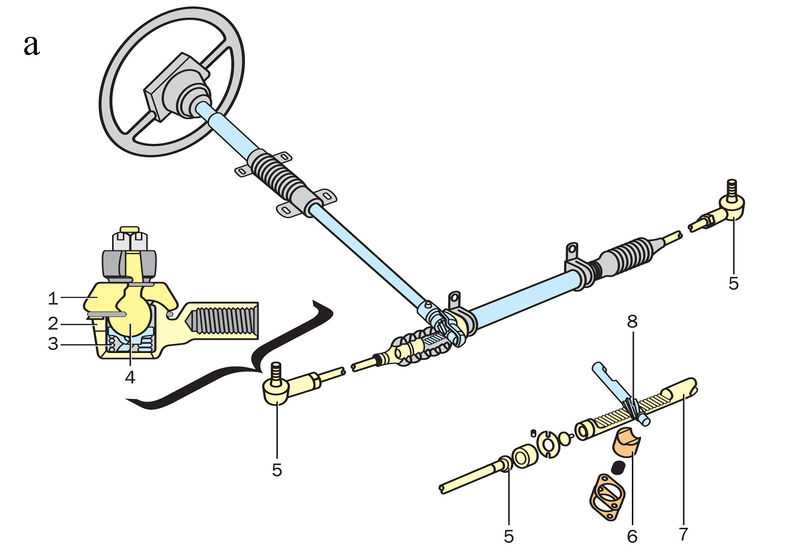 Прямой электрический
рулевое управление использует электродвигатель, прикрепленный к рулевой рейке через
зубчатый механизм (без насоса или жидкости). Различные типы двигателей и
возможны зубчатые передачи. Микропроцессор управляет рулевым управлением
динамика и усилия водителя. Входные данные включают скорость автомобиля и
рулевое управление, крутящий момент на колесах, угловое положение и скорость поворота. А
«датчик рулевого управления» расположен на входном валу, где он входит в
корпус редуктора. Датчик рулевого управления на самом деле состоит из двух датчиков.
один: «датчик крутящего момента», который преобразует входной крутящий момент рулевого управления и его
направление в сигналы напряжения и «датчик вращения», который
конвертирует % % %
Прямой электрический
рулевое управление использует электродвигатель, прикрепленный к рулевой рейке через
зубчатый механизм (без насоса или жидкости). Различные типы двигателей и
возможны зубчатые передачи. Микропроцессор управляет рулевым управлением
динамика и усилия водителя. Входные данные включают скорость автомобиля и
рулевое управление, крутящий момент на колесах, угловое положение и скорость поворота. А
«датчик рулевого управления» расположен на входном валу, где он входит в
корпус редуктора. Датчик рулевого управления на самом деле состоит из двух датчиков.
один: «датчик крутящего момента», который преобразует входной крутящий момент рулевого управления и его
направление в сигналы напряжения и «датчик вращения», который
конвертирует % % %
ele t ally ed teen u en elett t d e the teen hyd аулический щенок или рулевая линия напрямую. Усилитель руля Поэтому функция не зависит от скорости двигателя, что приводит к значительная экономия энергии. $ & % # # # $ $ $ # &
скорость вращения и направление в сигналы напряжения. Ан
Схема «интерфейса», которая находится в одном корпусе, преобразует
сигналы от датчика крутящего момента и датчика вращения в сигналы
управляющая электроника может обрабатывать. Входы от датчика рулевого управления
обрабатывается микропроцессорным блоком управления, который также контролирует
сигнал от датчика скорости автомобиля. Затем входы датчиков
по сравнению с тем, чтобы определить, сколько мощности требуется в соответствии с
на предварительно запрограммированную «карту усилий» в памяти блока управления.
Затем блок управления отправляет соответствующую команду на «питание».
блок», который затем снабжает электродвигатель током.
двигатель толкает стойку вправо или влево в зависимости от того, в какую сторону
напряжение течет (реверсирование тока меняет направление
двигатель крутится). Увеличение тока двигателя увеличивает
количество силовой помощи. Система имеет три режима работы:
«нормальный» режим управления, в котором левый или правый усилитель мощности
предоставляется в ответ на ввод от рулевого крутящего момента и вращения
входы датчиков; режим управления «возврат», который используется для помощи
возврат руля после завершения поворота; и «демпфер» управления
режим, который меняется в зависимости от скорости автомобиля, чтобы улучшить ощущение дороги и
гасить отдачу.
Ан
Схема «интерфейса», которая находится в одном корпусе, преобразует
сигналы от датчика крутящего момента и датчика вращения в сигналы
управляющая электроника может обрабатывать. Входы от датчика рулевого управления
обрабатывается микропроцессорным блоком управления, который также контролирует
сигнал от датчика скорости автомобиля. Затем входы датчиков
по сравнению с тем, чтобы определить, сколько мощности требуется в соответствии с
на предварительно запрограммированную «карту усилий» в памяти блока управления.
Затем блок управления отправляет соответствующую команду на «питание».
блок», который затем снабжает электродвигатель током.
двигатель толкает стойку вправо или влево в зависимости от того, в какую сторону
напряжение течет (реверсирование тока меняет направление
двигатель крутится). Увеличение тока двигателя увеличивает
количество силовой помощи. Система имеет три режима работы:
«нормальный» режим управления, в котором левый или правый усилитель мощности
предоставляется в ответ на ввод от рулевого крутящего момента и вращения
входы датчиков; режим управления «возврат», который используется для помощи
возврат руля после завершения поворота; и «демпфер» управления
режим, который меняется в зависимости от скорости автомобиля, чтобы улучшить ощущение дороги и
гасить отдачу. Если руль повернуть и удерживать в
полностью заблокированное положение и рулевое управление достигают максимума,
Блок управления уменьшает ток на электродвигателе, чтобы предотвратить
ситуация перегрузки, которая может повредить двигатель. Блок управления
также предназначен для защиты
Если руль повернуть и удерживать в
полностью заблокированное положение и рулевое управление достигают максимума,
Блок управления уменьшает ток на электродвигателе, чтобы предотвратить
ситуация перегрузки, которая может повредить двигатель. Блок управления
также предназначен для защиты
двигатель от скачков напряжения от неисправного генератора или
проблема с зарядкой. Электронный блок управления рулевым управлением способен
самодиагностики неисправностей путем мониторинга входов системы и
выходы и управляющий ток электродвигателя. Если
возникает проблема, блок управления выключает систему, нажимая
аварийное реле в блоке питания. Это устраняет всю власть
помощи, заставляя систему вернуться к ручному управлению. А
сигнальная лампа EPS на приборной панели также загорается, чтобы предупредить водителя. прибыль на акцию
можно разделить на три типа в зависимости от положения
двигатель: 1. Вспомогательный тип стойки 2. Вспомогательный тип шестерни 3. Вспомогательный механизм рейки
тип Электрические системы имеют небольшое преимущество в топливной экономичности
потому что нет постоянно работающего гидравлического насоса с ременным приводом,
требуется ли помощь или нет, и это основная причина
для их введения. Еще одним важным преимуществом является устранение
вспомогательного оборудования двигателя с ременным приводом и несколько высоконапорных
гидравлические шланги между гидравлическим насосом, установленным на двигателе,
и рулевой механизм, установленный на шасси. Это значительно
упрощает изготовление и обслуживание. Путем включения
электронная система контроля устойчивости, электроусилитель руля может
мгновенно изменять уровни помощи крутящему моменту, чтобы помочь водителю уклониться
маневры. Первые системы электроусилителя руля появились на
Хонда NSX в 1990, Honda S2000 1999 года и BMW Z4.
в 2002 году. Сегодня ряд производителей используют электроэнергию
рулевое управление.
Еще одним важным преимуществом является устранение
вспомогательного оборудования двигателя с ременным приводом и несколько высоконапорных
гидравлические шланги между гидравлическим насосом, установленным на двигателе,
и рулевой механизм, установленный на шасси. Это значительно
упрощает изготовление и обслуживание. Путем включения
электронная система контроля устойчивости, электроусилитель руля может
мгновенно изменять уровни помощи крутящему моменту, чтобы помочь водителю уклониться
маневры. Первые системы электроусилителя руля появились на
Хонда NSX в 1990, Honda S2000 1999 года и BMW Z4.
в 2002 году. Сегодня ряд производителей используют электроэнергию
рулевое управление.
Транспортное средство с рулевым механизмом, управляемым джойстиком – бесплатные образцы
Введение
В данной статье предлагается роботизированное транспортное средство с рулевым механизмом. В транспортных средствах используется интеллектуальная система рулевого управления, которая позволяет управлять с легкостью. Механизм рулевого управления обеспечивает разумное использование двигателей для движения автомобиля назад и поворота влево или вправо. В системе рулевого управления используется джойстик для управления движением транспортного средства с помощью радиочастотной передачи (Саха и др., 2015). Основное внимание в этом проекте направлено на уменьшение усилий, с которыми приходится сталкиваться людям с ограниченными возможностями при вождении.
Механизм рулевого управления обеспечивает разумное использование двигателей для движения автомобиля назад и поворота влево или вправо. В системе рулевого управления используется джойстик для управления движением транспортного средства с помощью радиочастотной передачи (Саха и др., 2015). Основное внимание в этом проекте направлено на уменьшение усилий, с которыми приходится сталкиваться людям с ограниченными возможностями при вождении.
Исследование проекта основано на анализе рулевого механизма для людей с ограниченными возможностями, которые сталкиваются с проблемами при вождении автомобиля. В литературной части рассматриваются работы, уже выполненные другими исследователями. Исследование основано на определенных вопросах и целях, чтобы соответствовать требованиям исследования. Также анализируются теоретические подходы, используемые для сбора информации для данного исследования. Выполняется экспериментальная установка, и их результаты анализируются для достижения целей проекта. Надлежащее планирование выполнено, чтобы выполнить работу за 8 недель.
Надлежащее планирование выполнено, чтобы выполнить работу за 8 недель.
Обзор последних достижений/литературы
Чжэн, Ху и Ян (2016) описали, что есть люди, которые не могут выполнять свою повседневную деятельность из-за инвалидности, поэтому они пользуются инвалидной коляской. это автоматизировано и требует меньше времени. Это делается путем предоставления им джойстика, который пользователь перемещает в направлении, в котором он хочет двигаться. Когда рулевое управление заменяется джойстиком, управлять автомобилем становится легко и без усилий (Боуман и др., 2015). Рулевое колесо заменяется сборкой джойстика, электродвигателя, а также коробки передач. Он подает сигнал на блок управления, который передается на двигатель. Крутящий момент двигателя увеличивается за счет коробки передач, а его мощность взаимосвязана с рулевой колонкой. Розенберг (2017) заявил, что когда пользователь хочет переместиться из одного места в другое, он указывает на место, куда он хочет переместиться, и инвалидное кресло автоматически перемещается в этом месте. Риф и Шульц (2017) утверждали, что джойстик управляет скоростью изменения угла поворота рулевого колеса вместо прямого изменения угла поворота рулевого колеса. Делая перемещение джойстика с постоянной скоростью, угол поворота постоянно увеличивается. Джойстик приводится в исходное положение, то есть в центральное место, а затем происходит изменение угла поворота руля.
Риф и Шульц (2017) утверждали, что джойстик управляет скоростью изменения угла поворота рулевого колеса вместо прямого изменения угла поворота рулевого колеса. Делая перемещение джойстика с постоянной скоростью, угол поворота постоянно увеличивается. Джойстик приводится в исходное положение, то есть в центральное место, а затем происходит изменение угла поворота руля.
Naboulsi (2017) указал, что для достижения максимального отклонения рулевого управления джойстик удерживается вдали от центра в течение более длительного времени. Ключевым существенным преимуществом этой системы является достижение чувствительности для управления в большем диапазоне перемещения джойстика. Обычная система рулевого управления используется как силовая система для людей с ограниченными возможностями (Choromanski, Grabarek & Kozłowski 2015). Для работы над этим конкретным проектом используются два типа джойстиков. Направленный интерфейс необходим для отображения конкретных направлений движения транспортного средства на контроллере.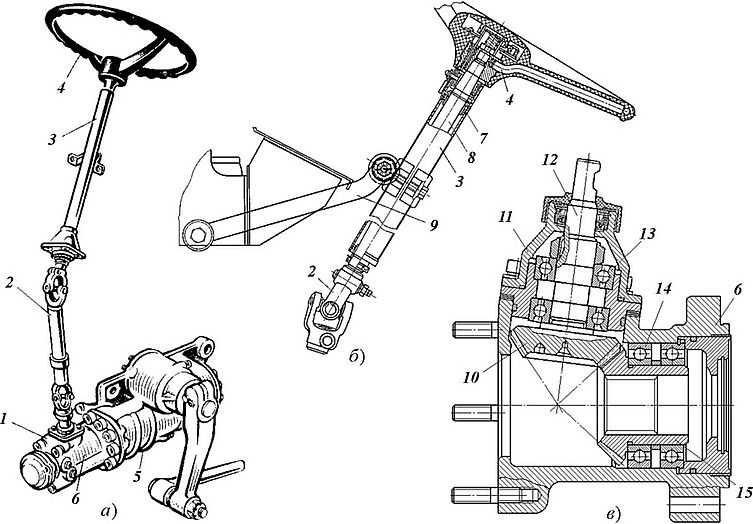 Субрт, Чжу и Колстад (2014) заявили, что в аналоговом джойстике нет переменного выхода. В нем говорится, что когда пользователь нажимает кнопку, получается максимальный результат. Гил и др. (2013) утверждали, что в джойстике сопротивления рычаг фиксируется в одной точке на основе шарового шарнира, что обеспечивает рычагу его две степени свободы. Этот джойстик основан на феномене сопротивления. Когда есть изменение сопротивления, получается переменный выход. Ким и Ким (2016) заявили, что среди двух типов джойстиков джойстик сопротивления считается наиболее совместимым с этой системой рулевого управления, поэтому выбран джойстик сопротивления.
Субрт, Чжу и Колстад (2014) заявили, что в аналоговом джойстике нет переменного выхода. В нем говорится, что когда пользователь нажимает кнопку, получается максимальный результат. Гил и др. (2013) утверждали, что в джойстике сопротивления рычаг фиксируется в одной точке на основе шарового шарнира, что обеспечивает рычагу его две степени свободы. Этот джойстик основан на феномене сопротивления. Когда есть изменение сопротивления, получается переменный выход. Ким и Ким (2016) заявили, что среди двух типов джойстиков джойстик сопротивления считается наиболее совместимым с этой системой рулевого управления, поэтому выбран джойстик сопротивления.
Миямото и др. (2014) продемонстрировали, что система рулевого управления использует джойстик для управления движением транспортного средства с использованием радиочастотной передачи. Схема приемника системы рулевого управления включает в себя радиочастотный приемник, который подключен к схеме микроконтроллера для считывания радиочастотных команд.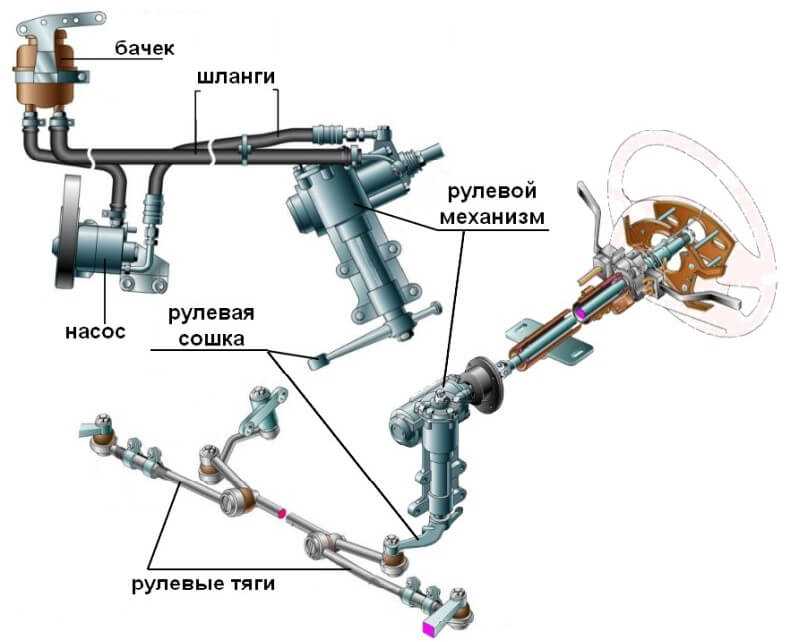 Микроконтроллер используется для обработки команд и управления двигателем для достижения желаемого движения транспортного средства. Моаззам и др. (2016) заявили, что сервопривод создается для обеспечения рулевого управления, в то время как двигатели постоянного тока используются для обеспечения движения движения. Таким образом, рулевой механизм транспортного средства управляется с помощью радиочастотного джойстика, который управляется по беспроводной сети (Сандерс, 2017). При использовании джойстика разработчик следит за тем, чтобы колеса устройства были направлены в нужном направлении движения. Шмальфуб и др. (2016) утверждали, что он преобразует вращательное движение рулевого управления в угловой поворот колеса.
Микроконтроллер используется для обработки команд и управления двигателем для достижения желаемого движения транспортного средства. Моаззам и др. (2016) заявили, что сервопривод создается для обеспечения рулевого управления, в то время как двигатели постоянного тока используются для обеспечения движения движения. Таким образом, рулевой механизм транспортного средства управляется с помощью радиочастотного джойстика, который управляется по беспроводной сети (Сандерс, 2017). При использовании джойстика разработчик следит за тем, чтобы колеса устройства были направлены в нужном направлении движения. Шмальфуб и др. (2016) утверждали, что он преобразует вращательное движение рулевого управления в угловой поворот колеса.
Вопрос исследования, цель/задачи и подцели
Вопросы исследования
Ниже приведены вопросы исследования:
- Уменьшает ли система рулевого управления с помощью джойстика усилия для инвалидов?
- Совместим ли джойстик сопротивления с системой рулевого управления?
Цели и подзадачи исследования
Целью данного исследования является предоставление инвалидам системы рулевого управления, которая поможет им управлять инвалидной коляской. Предлагаемая система также обеспечивает комфорт водителю, поскольку снижает усилие на рулевом колесе. Благодаря устранению рулевого колеса и колонки устраняются опасности для людей с ограниченными возможностями, связанные с любыми несчастными случаями. Для того, чтобы завершить исследование проекта, следующие цели исследования:
Предлагаемая система также обеспечивает комфорт водителю, поскольку снижает усилие на рулевом колесе. Благодаря устранению рулевого колеса и колонки устраняются опасности для людей с ограниченными возможностями, связанные с любыми несчастными случаями. Для того, чтобы завершить исследование проекта, следующие цели исследования:
- Определить тип джойстика, используемого для роботизированного транспортного средства с рулевым механизмом
- Определить скорость изменения угла поворота рулевого колеса, которым управляет джойстик
- Оценка снижения усилия для людей с ограниченными возможностями при управлении инвалидной коляской
Научно-исследовательские цели
Ниже приведены цели данного конкретного исследования:
- Уменьшить усилие на рулевом колесе
- Для преобразования системы рулевого управления в систему рулевого управления с усилителем
- Эффективно управлять автомобилем инвалидам
Теоретическое содержание/методология
Рулевой механизм с электроусилителем
Выбранная тема проекта анализируется с использованием вторичных данных, собранных из рецензируемых журнальных статей, журналов и других источников.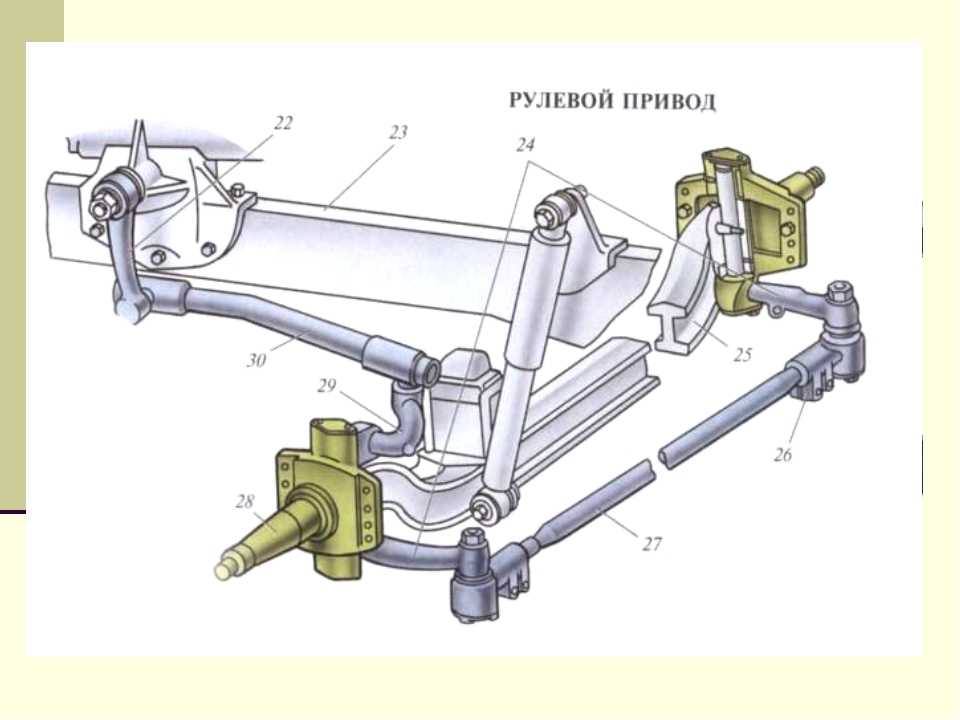 Сначала исследователь изучал и анализировал работу рулевого механизма автомобильной рулевой системы (Долс, 2016). Они изучили различные типы статей, которые публикуются в области машиностроения. Основываясь на выбранном дизайне исследования, таком как описательный дизайн, легко проанализировать минимальное усилие, которое требуется для системы рулевого управления автомобиля (Faria, Reis & Lau, 2014). Используя этот дизайн исследования, он направлен на получение подробной информации о событиях, которые произошли, с предоставлением подробного описания выбранной темы. Этот процесс проектирования определяет подробную информацию по выбранной теме. Исследователь выбрал надлежащие исследовательские материалы для компонентов устройства и изучил их различные типы свойств (Ким и Ким, 2016). Предложенная система выполняла испытания в дополнение к ее анализу. Обычная система рулевого управления анализируется с разработкой системы рулевого управления для людей с ограниченными возможностями, поскольку она управляет направлением транспортного средства, поворачивая колеса рулевого управления (Чжэн, Ху и Ян, 2016).
Сначала исследователь изучал и анализировал работу рулевого механизма автомобильной рулевой системы (Долс, 2016). Они изучили различные типы статей, которые публикуются в области машиностроения. Основываясь на выбранном дизайне исследования, таком как описательный дизайн, легко проанализировать минимальное усилие, которое требуется для системы рулевого управления автомобиля (Faria, Reis & Lau, 2014). Используя этот дизайн исследования, он направлен на получение подробной информации о событиях, которые произошли, с предоставлением подробного описания выбранной темы. Этот процесс проектирования определяет подробную информацию по выбранной теме. Исследователь выбрал надлежащие исследовательские материалы для компонентов устройства и изучил их различные типы свойств (Ким и Ким, 2016). Предложенная система выполняла испытания в дополнение к ее анализу. Обычная система рулевого управления анализируется с разработкой системы рулевого управления для людей с ограниченными возможностями, поскольку она управляет направлением транспортного средства, поворачивая колеса рулевого управления (Чжэн, Ху и Ян, 2016). Предлагаемая система работает по принципу электроусилителя руля. Он состоит из крутящего момента, ультразвукового датчика и исполнительного механизма.
Предлагаемая система работает по принципу электроусилителя руля. Он состоит из крутящего момента, ультразвукового датчика и исполнительного механизма.
Прочность бобов и прочность на изгиб
После анализа различных исследовательских работ исследователь выполнил некоторые расчеты для проведения исследования. Исследователь вычисляет значения цилиндрического зубчатого колеса, а также пары шестерен для передаточного отношения 3. Прочность боба рассчитывается как: σ b = (s ut ) / 3, а прочность вала рассчитывается как: dp = m* Зп. В системе рулевого управления джойстик, двигатель и микроконтроллер считаются критическими компонентами системы (Choroma?ski, Grabarek & Koz?owski 2015). Эти идентифицированные компоненты имеют основной контроль и версию, необходимые для правильной работы предлагаемой системы. Джойстик является входом микроконтроллера и считается основным элементом управления системой. В этом конкретном исследовании микроконтроллер определяет сигнал с помощью джойстика по сравнению с уровнем, который называется значением таблицы поиска (Subrt, Zhu & Kolstad 2014). Он обеспечивает надлежащий уровень напряжения на двигателе. Двигатель крепится к двигателю, который поддерживает кронштейн. Он крепится к рулевой колонке автомобиля с помощью механически обработанного адаптера двигателя, который крепится болтами к рулевому валу.
Он обеспечивает надлежащий уровень напряжения на двигателе. Двигатель крепится к двигателю, который поддерживает кронштейн. Он крепится к рулевой колонке автомобиля с помощью механически обработанного адаптера двигателя, который крепится болтами к рулевому валу.
Гипотеза: Гипотеза для исследования:
Исследовательский вопрос | Гипотеза |
1. Уменьшает ли рулевое управление с помощью джойстика усилия для инвалидов? | h2: Система рулевого управления снижает усилие инвалидов при замене рулевого управления джойстиком. |
2. Совместим ли джойстик сопротивления с системой рулевого управления?
| h3: джойстик сопротивления хорошо совместим с системой рулевого управления. |
Экспериментальная установка
Эксперимент на симуляторе вождения
Эксперименты на симуляторе вождения проводятся с целью изучения конструктивных особенностей системы джойстика, которая используется для управления такими частями автомобиля, как акселератор, тормоз с рулевым управлением (Strenge , Зибург и Шмидт, 2016). Конструкция джойстика разработана и проверена по двум факторам: степени интерференции поперечного и продольного управления с последующей обратной связью с водителем. В эксперименте участвуют люди с ограниченными возможностями, у которых парализованы ноги, и у большинства из них нарушены функции рук и кистей. Симулятор вождения используется для исследования характеристик водителя (Faria, Reis & Lau, 2014). Он состоит из дисплея виртуальной реальности, который предлагает проецируемое изображение пути дороги, управление автомобилем с обратной связью по крутящему моменту с основными датчиками и моделью автомобиля, работающей в режиме реального времени.
Конструкция джойстика разработана и проверена по двум факторам: степени интерференции поперечного и продольного управления с последующей обратной связью с водителем. В эксперименте участвуют люди с ограниченными возможностями, у которых парализованы ноги, и у большинства из них нарушены функции рук и кистей. Симулятор вождения используется для исследования характеристик водителя (Faria, Reis & Lau, 2014). Он состоит из дисплея виртуальной реальности, который предлагает проецируемое изображение пути дороги, управление автомобилем с обратной связью по крутящему моменту с основными датчиками и моделью автомобиля, работающей в режиме реального времени.
Измерение угла поворота рулевого колеса и крутящего момента водителя
Аппаратное обеспечение «Электроусилитель руля» дает показания угла поворота рулевого колеса, а также измерения крутящего момента водителя. Он отправляется на модель автомобиля с использованием сетевой шины контроллера. Предлагаемая модель возвращает сигнал требования крутящего момента к «электрическому усилителю рулевого управления», чтобы предложить ощущение рулевого управления (Schmalfub et al. 2016).
2016).
Расчеты
В симуляторе используется MATLAB, а также такие инструменты, как Simulink и виртуальная реальность. Модель автомобиля реализована с использованием Simulink. По сути, этот эксперимент проводится с целью изучения эффектов, связанных с увеличением опыта работы с джойстиками (Choroma?ski, Grabarek & Koz?owski, 2015). Водители используются правой рукой для управления акселератором, а также тормозом.
Результаты, результаты и актуальность
Система управления с помощью джойстика позволяет людям с ограниченными возможностями управлять автомобилем вручную, сидя на электрическом инвалидном кресле. Работа джойстика осуществляется в направлении назад и вперед с ускорением автомобиля, когда автомобиль находится слева, а также вправо и поворачивает рулевое колесо (Riefe & Schulz 2017). Инвалид не обязан пересаживаться с инвалидной коляски на автокресло. При неисправности системы требуется техническое обслуживание системы путем перемещения педалей газа и тормоза с помощью механической связи, соединенной с рычагом джойстика. Рулевое колесо вращается электродвигателем, управляемым микроконтроллерной системой (Саха и др., 2015). Проанализировано, что угол поворота используется для отслеживания опорного угла, обеспечиваемого джойстиком. Чтобы понять систему привода джойстика с сиденьем для инвалидной коляски, разрабатывается механизм рулевого привода, который состоит из двигателя постоянного тока, потенциометра для определения угла и шестерен для передачи. Большинство автомобилей оснащены системой гидроусилителя руля, которая снижает мощность рулевого управления водителями (Миямото и др., 2014). Таким образом, предлагаемая система использует систему рулевого управления с усилителем, чтобы оценить систему управления автомобилем с помощью джойстика с наименьшей мощностью двигателя. На кабине автомобиля реального фургона монтируется прототип механизма и проверяется надежность проектируемой системы управления креслом-коляской с джойстиком.
Рулевое колесо вращается электродвигателем, управляемым микроконтроллерной системой (Саха и др., 2015). Проанализировано, что угол поворота используется для отслеживания опорного угла, обеспечиваемого джойстиком. Чтобы понять систему привода джойстика с сиденьем для инвалидной коляски, разрабатывается механизм рулевого привода, который состоит из двигателя постоянного тока, потенциометра для определения угла и шестерен для передачи. Большинство автомобилей оснащены системой гидроусилителя руля, которая снижает мощность рулевого управления водителями (Миямото и др., 2014). Таким образом, предлагаемая система использует систему рулевого управления с усилителем, чтобы оценить систему управления автомобилем с помощью джойстика с наименьшей мощностью двигателя. На кабине автомобиля реального фургона монтируется прототип механизма и проверяется надежность проектируемой системы управления креслом-коляской с джойстиком.
Планирование проекта и диаграмма Ганта
Основные этапы и результаты исследования проекта:
Веха | Ожидаемый результат |
Этап 1: Завершение подготовки проекта |
|
Веха 2: Завершение методологии исследования |
|
Этап 3: Завершение проектной документации |
|
Рис. 1. Диаграмма Ганта
1. Диаграмма Ганта
(Источник: создано автором)
Выводы
Делается вывод, что у инвалида меньше силы в руке, чтобы управлять автомобилем. Обычная система рулевого управления давала человеку мощность, чтобы он мог управлять автомобилем. Также проанализировано, что использование джойстика в рулевом управлении устранит усилие, которое требуется от человека для управления автомобилем. Предлагаемая система устанавливается в автомобиль в качестве вспомогательной системы. Зависимость инвалида от других также снижается за счет использования предложенной системы джойстиков. Целью данного исследования является обеспечение управления транспортным средством с помощью джойстика для людей с ограниченными физическими возможностями. Требуется реакция на работу джойстика, учитывающая рулевое управление, ускорение и торможение, что считается естественным для человеческого мозга. Первое соображение, которое предусмотрено для размещения через систему управления, — это взаимодействие человека с рулевыми операциями транспортного средства.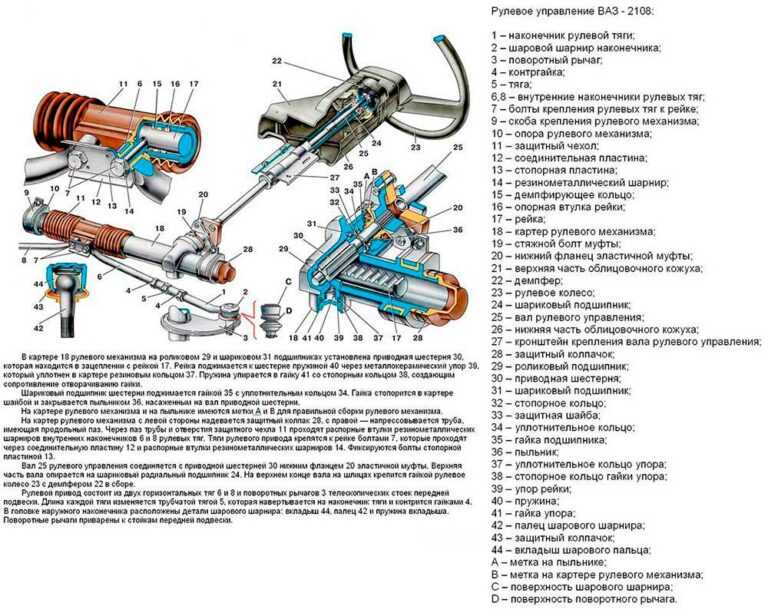
Ссылки
Боуман, Дж., Уоллер, Т., Чин, Т. и Ползин, Дж., Deere & Company, 2015 г. Способ и устройство для активации контроля плавности хода. Патент США 9 055 719.
Хоромаски, В., Грабарек, И. и Козловски, М., 2015. Моделирование и экспериментальное исследование выбранных параметров многофункционального рулевого колеса с точки зрения возможностей пользователей и точности маневров автомобиля. Procedia Manufacturing, 3, стр. 3085–3091.
Кромбез, Д.С., Ford Global Technologies, Llc, 2015. Система и метод управления транспортным средством. Патент США 8,942 889.
Долс, Дж. Ф., 2016 г. На пути к более безопасному вождению и процедуре оценки водительских способностей с помощью джойстика. На 17-й Международной конференции по безопасности дорожного движения на пяти континентах (RS5C 2016), Рио-де-Жанейро, Бразилия, 17–19 мая 2016 г. Statens väg-och transportforskningsinstitut.
Фариа Б.М., Рейс Л.П. и Лау Н., 2014 г. Обзор интеллектуальных прототипов и симуляторов инвалидных колясок. В Новых перспективах информационных систем и технологий, том 1 (стр. 545–557). Спрингер, Чам.
В Новых перспективах информационных систем и технологий, том 1 (стр. 545–557). Спрингер, Чам.
Gil, J.J., Díaz, I., Ciáurriz, P. & Echeverria, M., 2013. Новая система управления вождением с тактильной обратной связью: проектирование и предварительные проверочные испытания. Транспортные исследования, часть C: новые технологии, 33, стр. 22–36.
Ким Ю. и Ким Ю., 2016 г. Эффективность адаптивного управления вождением с использованием технологии Drive-by-Wire для людей с ограниченными возможностями. Журнал Эргономического общества Кореи, 35(1).
Миямото Х., Набекура К., Окадзима Х. и Мацунага Н., 2014 г., август. Рулевое управление инвалидной коляской типа «контейнер» с использованием усилия избегания, определяемого смещением веса. В Advanced Mechatronic Systems (ICAMechS), Международная конференция 2014 г. (стр. 330–335). IEEE.
Моаззам Х., Фарук У., Рафик Ф., Асад М.У. и Аббас Г., 2016 г., август. Проектирование и строительство гибридного автомобиля с ассистентом мобильности для людей с ограниченными возможностями.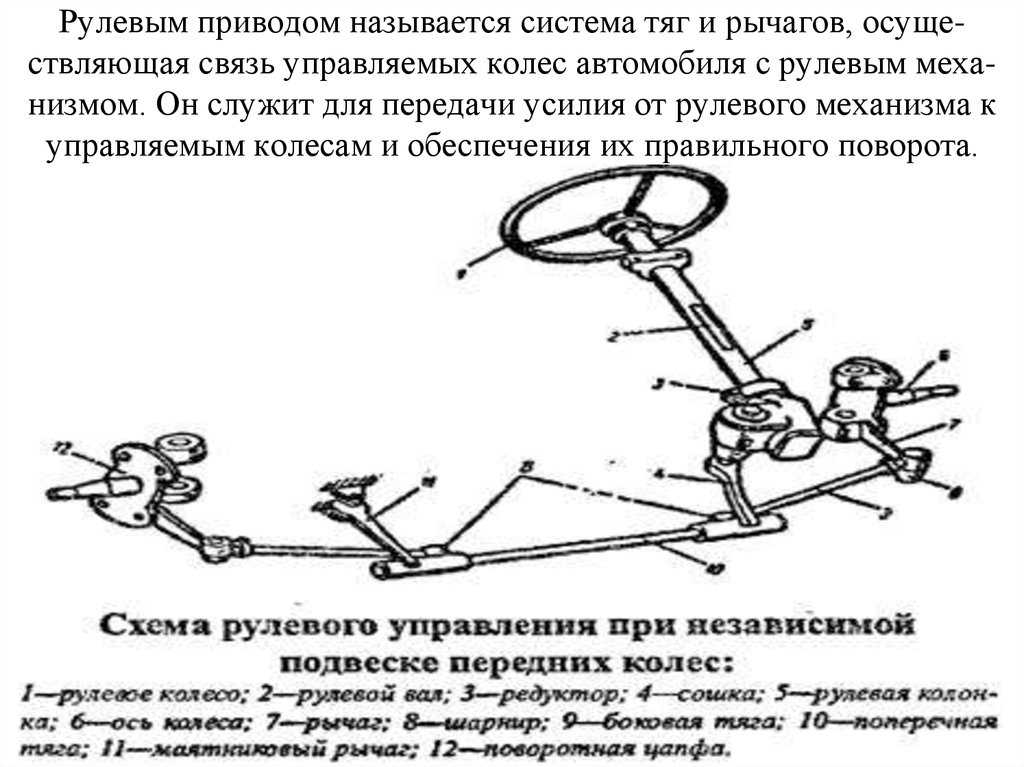 В Инновационных вычислительных технологиях (INTECH), Шестая международная конференция 2016 г. (стр. 150-154). IEEE.
В Инновационных вычислительных технологиях (INTECH), Шестая международная конференция 2016 г. (стр. 150-154). IEEE.
Набулси, Массачусетс, Act-Ip, 2017. Система контроля безопасности для приложений в транспортных средствах. Патент США 9 713 994.
Розенберг, Л.Б., Immersion Corporation, 2017 г. Тактильный пульт дистанционного управления для игрушек. Патент США 9 625 905.
Саха, К., Госвами, Д., Саха, С., Конар, А., Лекова, А. и Нагар, А.К., 2015 г., август. Новая система нечеткого интерфейса, управляемая жестами, для автомобильных гонок. В нечетких системах (FUZZ-IEEE), Международная конференция IEEE 2015 г. (стр. 1–8). IEEE.
Сандерс, Д.А., 2017 г. Использование факторов уверенности в своих силах для принятия решения о том, как разделить контроль между водителями инвалидных колясок с приводом от человека и ультразвуковыми датчиками. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 25(8), стр. 1221–1229.
Шмальфуб, Л., Рупп, Р., Туга, М. Р., Когут, А., Хьюитт, М., Майнке, Дж., Клинкер, Ф., Дуттенхофер, В., Экк, У., Микут, Р. и Reischl, M., 2016. Управление на слух: миоэлектрический аурикулярный контроль механических инвалидных колясок для людей с травмой спинного мозга. Восстановительная неврология и неврология, 34(1), стр. 79–95.
Р., Когут, А., Хьюитт, М., Майнке, Дж., Клинкер, Ф., Дуттенхофер, В., Экк, У., Микут, Р. и Reischl, M., 2016. Управление на слух: миоэлектрический аурикулярный контроль механических инвалидных колясок для людей с травмой спинного мозга. Восстановительная неврология и неврология, 34(1), стр. 79–95.
Strenge, B., Sieburg, S. & Schmidt, L., 2016. Экспериментальное сравнение конфигураций рулевого управления с боковой рукояткой для инновационного электрического двухколесного транспортного средства. В Достижениях в области эргономичного проектирования систем, продуктов и процессов (стр. 313–326). Спрингер Берлин Гейдельберг.
Subrt, M.C., Zhu, Y. & Kolstad, O.C., Caterpillar Inc., 2014. Система управления сочленением с отслеживанием траектории движения. Патент США 8 807 261.
Чжэн, Х., Ху, Дж. и Ян, С., 2016 г. Конструкция с переменным передаточным числом рулевого управления для системы электронного управления автомобилем с джойстиком (№ 2016-01-0455). Технический документ SAE.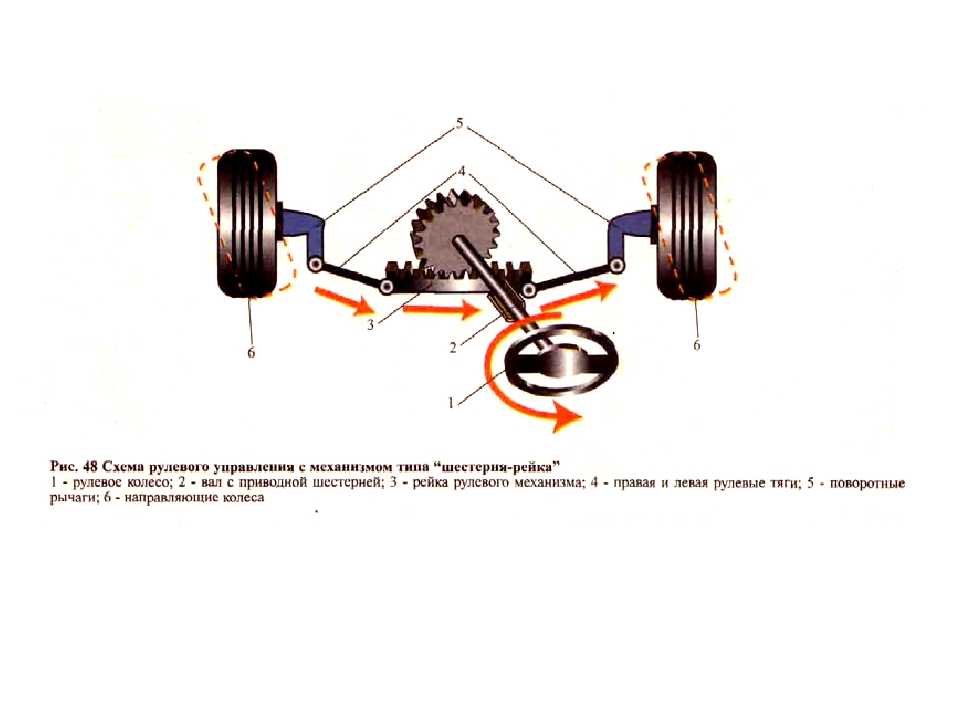
CCCT — Руководящие комитеты NCTN — Рак молочной железы
Руководящий комитет NCI по раку молочной железы (BCSC) был создан в сентябре 2008 г. На ежемесячных собраниях он занимается разработкой, определением приоритетов и оценкой концепций для фазы 2 и фазы 3. испытания лечения рака молочной железы у взрослых. Просмотрите список членов BCSC.
Стратегические приоритеты
- Стратегические приоритеты BCSC были сформулированы с целью согласования большинства представленных концепций с этими установленными приоритетами. Они касаются областей неудовлетворенных клинических потребностей, важных оставшихся без ответа клинических вопросов и потенциальных новых подходов к лечению заболеваний.
Целевая группа по онкологии молочной железы (BOLD) Целевая группа
- BOLD была создана для обеспечения раннего ввода концепций для исследований локализованного рака молочной железы, леченного хирургическим путем или лучевой терапией до рассмотрения BCSC.
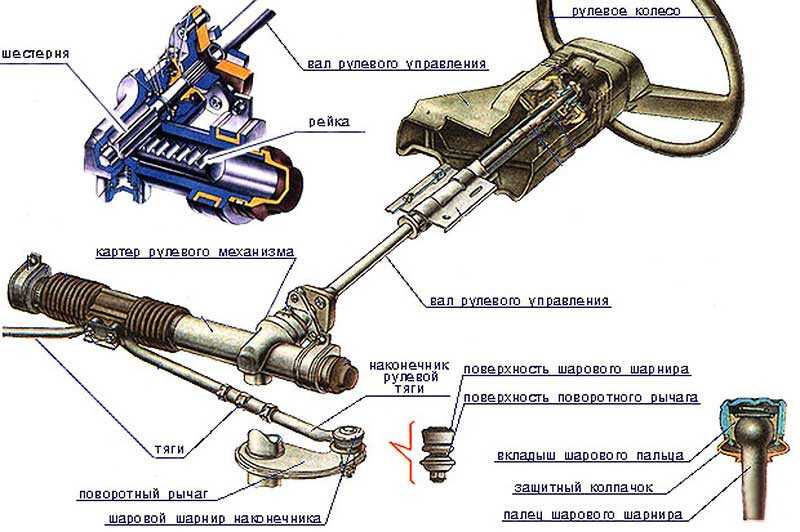 Одним из проектов BOLD была разработка форм отчетов о случаях заболевания специально для локализованных исследований рака молочной железы. Если вам нужна помощь в доступе к формам отчетов о делах, ознакомьтесь с нашими пошаговыми инструкциями.
Одним из проектов BOLD была разработка форм отчетов о случаях заболевания специально для локализованных исследований рака молочной железы. Если вам нужна помощь в доступе к формам отчетов о делах, ознакомьтесь с нашими пошаговыми инструкциями.
Целевая группа по иммуноонкологии молочной железы (BIO)
- Целевая группа BIO была создана для предоставления раннего вклада в концепции исследований, определяющих роль иммунотерапии в лечении пациентов с раком молочной железы, до рассмотрения BCSC. .
Совещания по планированию клинических испытаний (CTPM)
Совещания по планированию клинических испытаний проводятся периодически и посвящены конкретным темам, связанным с клиническими испытаниями. Ниже перечислены важные BCSC CTPM:
- Выявление и лечение пациентов с риском позднего рецидива ER+ рака молочной железы
Пациенты с эстроген-рецептор-положительным (ER+) раком молочной железы, особенно с поражением лимфоузлов, сталкиваются со значительным риском позднего рецидива и связанных с ним неблагоприятных клинических исходов.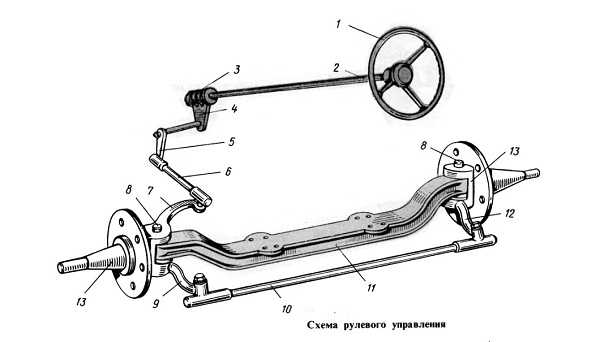 Более половины рецидивов возникают в течение пяти лет после постановки диагноза. Хотя лечение химиотерапией и адъювантной эндокринной терапией может иметь некоторую пользу, они обеспечивают минимальное снижение абсолютного риска и вызывают побочные эффекты, влияющие на качество жизни пациентов. Этот 1,5-дневный CTPM, проведенный в мае 2019 г.заложили основу для разработки клинического испытания для проверки вмешательства для пациентов с высоким риском позднего рецидива ER+ рака молочной железы. Прочитайте исполнительное резюме.
Более половины рецидивов возникают в течение пяти лет после постановки диагноза. Хотя лечение химиотерапией и адъювантной эндокринной терапией может иметь некоторую пользу, они обеспечивают минимальное снижение абсолютного риска и вызывают побочные эффекты, влияющие на качество жизни пациентов. Этот 1,5-дневный CTPM, проведенный в мае 2019 г.заложили основу для разработки клинического испытания для проверки вмешательства для пациентов с высоким риском позднего рецидива ER+ рака молочной железы. Прочитайте исполнительное резюме. - Отсутствие хирургического вмешательства у пациентов с полным клиническим/рентгенологическим ответом на неоадъювантную химиотерапию: смена парадигмы
Некоторые подтипы больных раком молочной железы (трижды отрицательный и HER2-положительный) имеют высокие показатели полного патологического ответа на неоадъювантную системную терапию (43–67). %). Пациенты, получающие неоадъювантную химиотерапию, у которых достигнут патологический полный ответ, имеют очень низкую частоту местных рецидивов и отличную общую выживаемость, что вызывает интерес к концепции исключения хирургического вмешательства у этих пациентов.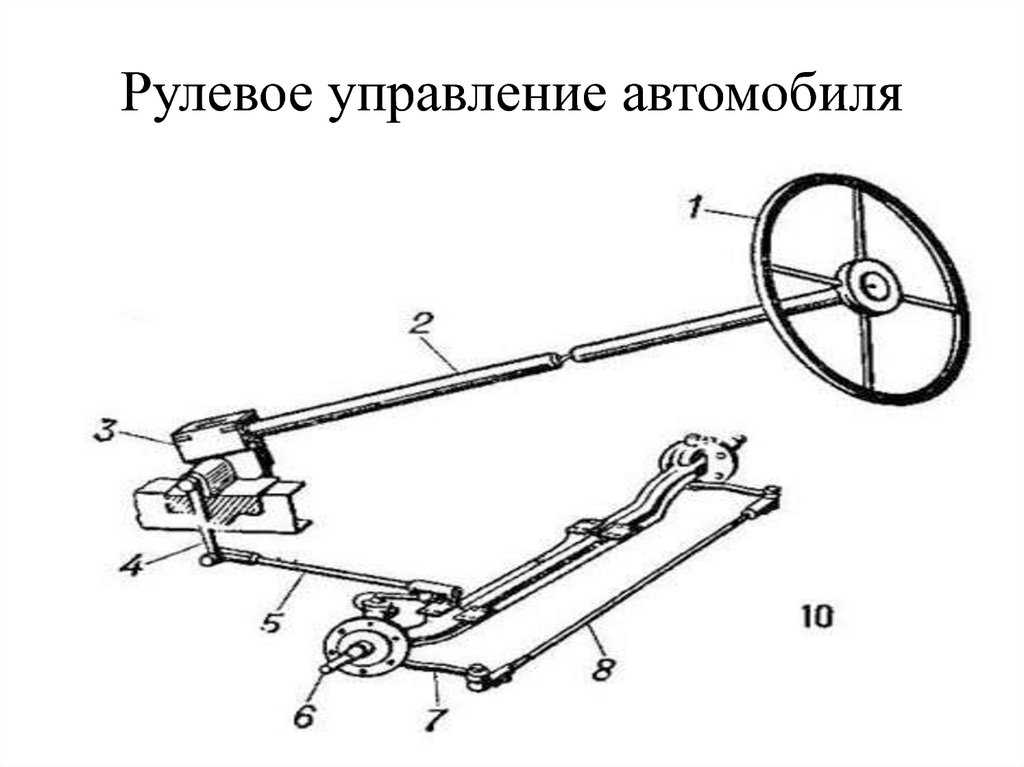 Предыдущие исследования предполагали, что возможно отказаться от хирургического вмешательства, но они не проводились с использованием текущих схем системной терапии или методов визуализации. Текущие и предыдущие данные закладывают основу для исследования, которое окончательно определит, безопасно ли отказаться от хирургического вмешательства у пациентов, у которых прогнозируется высокая вероятность pCR. Цель этого 1,5-дневного CTPM в октябре 2017 года заключалась в разработке рекомендаций по дизайну для клинического испытания, чтобы определить, можно ли отказаться от операции для подгруппы пациентов с раком молочной железы, у которых есть полный клинический / рентгенологический ответ на неоадъювантную химиотерапию. Прочитайте исполнительное резюме.
Предыдущие исследования предполагали, что возможно отказаться от хирургического вмешательства, но они не проводились с использованием текущих схем системной терапии или методов визуализации. Текущие и предыдущие данные закладывают основу для исследования, которое окончательно определит, безопасно ли отказаться от хирургического вмешательства у пациентов, у которых прогнозируется высокая вероятность pCR. Цель этого 1,5-дневного CTPM в октябре 2017 года заключалась в разработке рекомендаций по дизайну для клинического испытания, чтобы определить, можно ли отказаться от операции для подгруппы пациентов с раком молочной железы, у которых есть полный клинический / рентгенологический ответ на неоадъювантную химиотерапию. Прочитайте исполнительное резюме. - Изменение образа жизни для улучшения безрецидивной выживаемости при ранней стадии инвазивного рака молочной железы
Несколько небольших исследований показали, что изменение образа жизни, включая физические упражнения и снижение веса, может улучшить безрецидивную выживаемость у женщин с инвазивным раком молочной железы. Чтобы подробно рассмотреть эту тему, в феврале 2014 г. в результате полуторадневной встречи было разработано исследование «Исследование потери веса при раке молочной железы» (исследование BWEL), в которое в настоящее время включаются пациенты. Прочитайте исполнительное резюме. Узнайте больше об исследовании .
Чтобы подробно рассмотреть эту тему, в феврале 2014 г. в результате полуторадневной встречи было разработано исследование «Исследование потери веса при раке молочной железы» (исследование BWEL), в которое в настоящее время включаются пациенты. Прочитайте исполнительное резюме. Узнайте больше об исследовании . - Испытания следующего поколения для эстроген-рецепторного (ER) положительного рака молочной железы
Хотя эстроген-рецепторный (ER)-положительный рак молочной железы имеет относительно хороший 5-летний прогноз, пациенты продолжают рецидивировать с течением времени, что делает ER-положительный рак молочной железы большинством смертей от рака молочной железы и, таким образом, нуждается в новых клинических испытаниях. Цели встречи заключались в рассмотрении стратегий улучшения результатов клинических испытаний любого класса лечения на любой стадии ER-положительного рака молочной железы с научным акцентом на преодоление механизмов устойчивости к гормональной терапии.