6. Индукционные датчики
Индукционные датчики предназначены для преобразования скорости линейных и угловых перемещений в ЭДС. Они относятся к датчикам генераторного типа. Принцип действия индукционных датчиков основан на законе электромагнитной индукции. Выходным сигналом индукционных датчиков является ЭДС, которая пропорциональна скорости изменения магнитного потока, пронизывающего витки катушки. Это изменение происходит за счет перемещения катушки в постоянном магнитном поле или за счет вращения ферромагнитного индуктора относительно неподвижной катушки.
Основным отличием
индукционных датчиков от индуктивных
является то, что в них используется
постоянное магнитное поле, а не переменное
(питание индуктивных датчиков
осуществляется от сети переменного
тока). Постоянное магнитное поле в
индукционных датчиках создается двумя
способами: постоянными магнитами или
катушкой, обтекаемой постоянным током.
На рис. 19, а показана схема датчика с обмоткой w2, размещенной в воздушном зазоре, в котором постоянный магнитный поток Ф создается катушкой w1, включенной на постоянное напряжение U=. При перемещении катушки в магнитном поле в ней индуцируется ЭДС, пропорциональная скорости перемещения: , гдеk — коэффициент пропорциональности, зависящий от числа виткови конструктивных параметров датчика.
Рис. 19. Схемы индукционных датчиков
На рис. 19, б показан датчик, в котором постоянный магнитный поток создается с помощью постоянного магнита с полюсными наконечниками. ЭДС, индуцируемая во вращающейся катушке, пропорциональна скорости вращения Ω:
В обоих этих датчиках катушки подвижны, поэтому для отвода от них выходного сигнала (ЭДС) необходимы гибкие токоподводы или контактные кольца со щетками.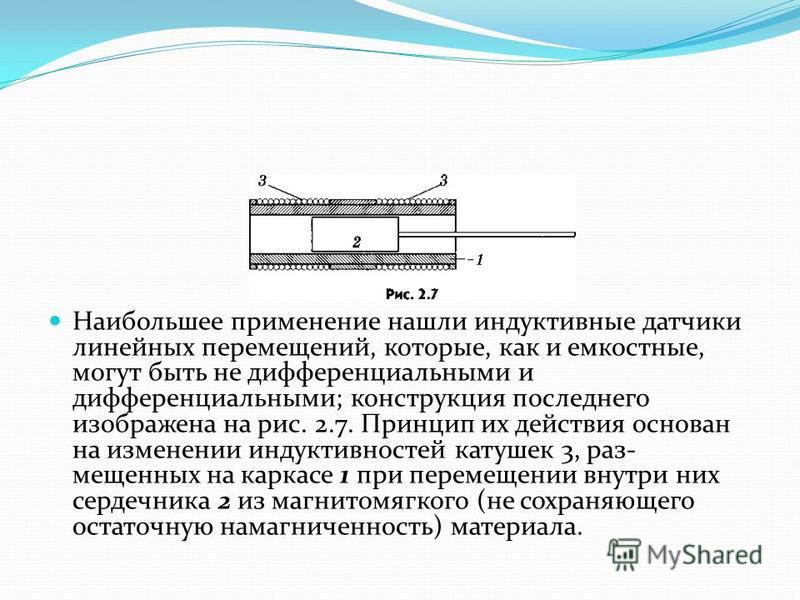
Индукционный датчик может быть выполнен и другой конструкции: с неподвижной катушкой и вращающимся постоянным магнитом (рис. 19, в). Надежность при этом повышается за счет отсутствия скользящего контакта.
Возможен и другой способ повышения надежности датчика по схеме рис. 19, б: и катушка, и постоянный магнит неподвижны, а в зазоре между ними вращается ферромагнитное кольцо с вырезами (рис. 19, г) или иной элемент, имеющий существенно разную магнитную проводимость по взаимно перпендикулярным осям. При вращении изменяется поток, пронизывающий плоскость катушки.
В датчиках (рис. 19, б, в, г) в качестве выходного сигнала можно использовать частоту ЭДС. Принцип их действия по существу такой же, как у синхронных генераторов. Для измерения частоты вращения используются и специальные электрические машины малой мощности — тахогенераторы.
Тахогенератор
постоянного тока (рис. 20, а) имеет
обмотку возбуждения, создающую при
питании постоянным током магнитный
поток Ф. При вращении якоря в нем создается ЭДС,
пропорциональная частоте вращения п: ,
где k —
постоянная, определяемая конструкцией.
При вращении якоря в нем создается ЭДС,
пропорциональная частоте вращения п: ,
где k —
постоянная, определяемая конструкцией.
Рис. 20. Тахогенераторы
Напомним, что частота вращения п обычно выражается в 1/мин (количество оборотов в минуту) и связана со скоростью вращения Ω выражением
или
С помощью коллектора и щеток выходной сигнал подается на нагрузку в виде выпрямленного напряжения.
Тахогенератор переменного тока (рис. 20, б) имеет на статоре две обмотки, сдвинутые одна относительно другой на 90 эл. град. Одна обмотка включается в сеть переменного тока. При вращении ротора, выполненного в виде тонкостенного электропроводящего цилиндра, в другой обмотке наводится переменная ЭДС, которая пропорциональна частоте вращения п. Для повышения температурной стабильности в качестве материала полого ротора используется константан.
Тахогенераторы
обладают высокой чувствительностью и
мощностью выходного сигнала. Общим
недостатком всех генераторных датчиков
является зависимость выходного сигнала
от сопротивления нагрузки.
Общим
недостатком всех генераторных датчиков
является зависимость выходного сигнала
от сопротивления нагрузки.
ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ
Индуктивные датчики
Структура
Индуктивные бесконтактные выключатели Компании «ТЕКО» состоят из следующих основных узлов.
Принцип действия
Принцип действия бесконтактного конечного выключателя (ВК) основан на изменении амплитуды колебаний генератора при внесении в активную зону датчика металлического, магнитного, ферромагнитного или аморфного материала определенных размеров. При подаче питания на конечный выключатель в области его чувствительной поверхности образуется изменяющееся магнитное поле, наводящее во внесенном в зону материале вихревые токи, которые приводят к изменению амплитуды колебаний генератора. В результате вырабатывается аналоговый выходной сигнал, величина которого изменяется от расстояния между датчиком и контролируемым предметом.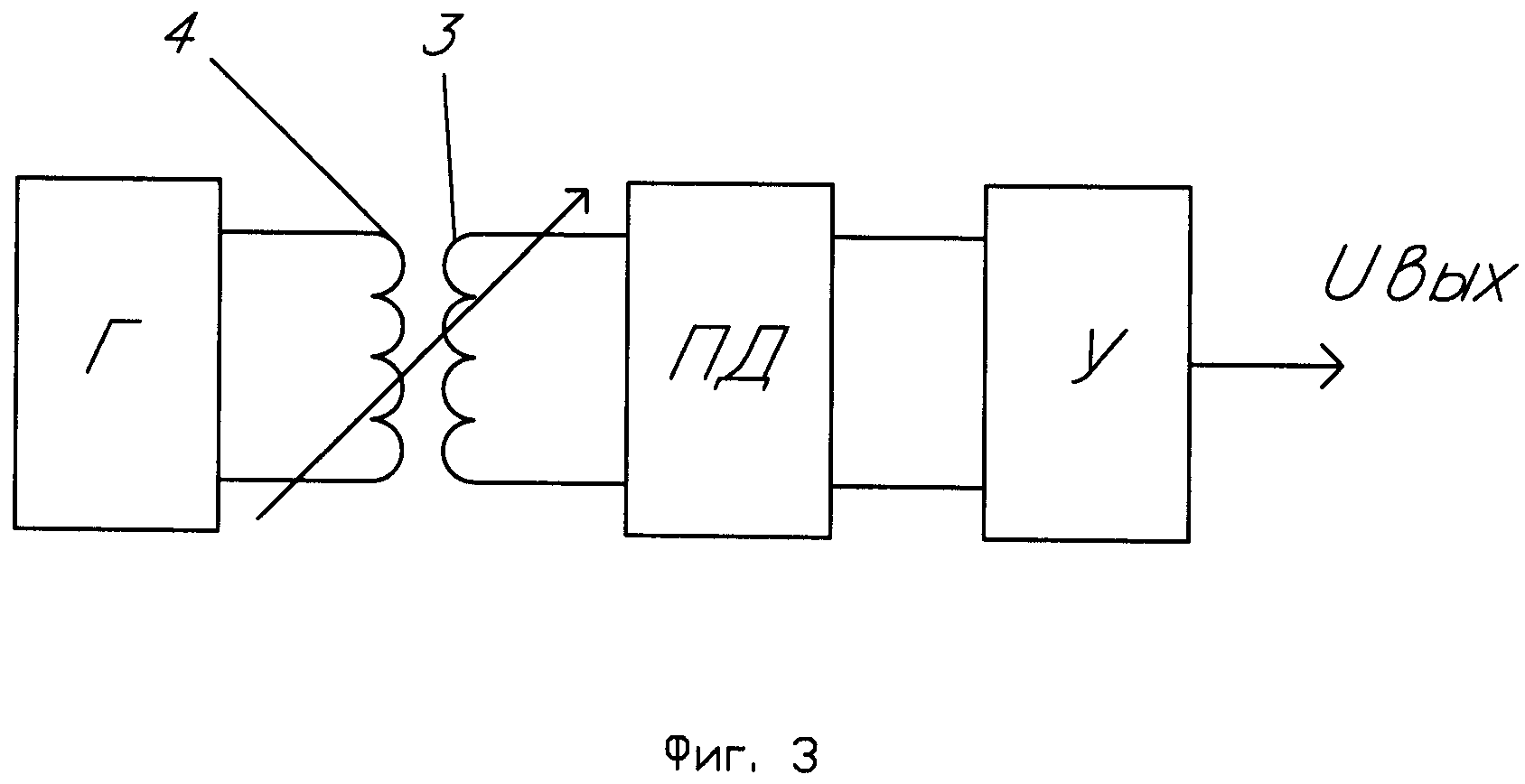 Триггер преобразует аналоговый сигнал в логический, устанавливая уровень переключения и величину гистерезиса.
Триггер преобразует аналоговый сигнал в логический, устанавливая уровень переключения и величину гистерезиса.
Чувствительная поверхность
Чувствительная поверхность — это площадка, ограниченная наружным диаметром ферритового сердечника, на котором собрана электромагнитная система датчика. Диаметр этой поверхности приблизительно равен диаметру датчика.
Активная зона
Активная зона бесконтактного индуктивного выключателя — та область перед его чувствительной поверхностью, где более всего сконцентрировано магнитное поле чувствительного элемента датчика. Она, как правило, соизмерима с размерами чувствительного элемента.
Измерительная пластина
В качестве измерительной пластинки используется стальная квадратная пластинка (сталь 40) толщиной 1 мм со сторонами, равными диаметру активной поверхности. Однако, если произведение 3хSном больше диаметра активной поверхности, то пластина выбирается со сторонами 3хSном.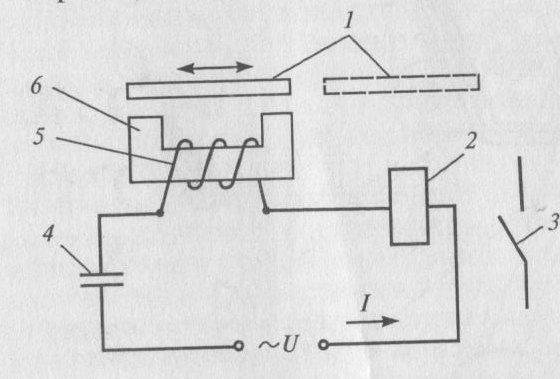
Расстояние переключения S
Расстояние переключения — расстояние, при котором объект, приближающийся к активной поверхности датчика, вызывает изменение выходного логического сигнала.
Номинальное расстояние переключения Sном
Номинальное расстояние переключения — теоретическая величина, не учитывающая разброс производственных параметров датчика, изменения температуры и напряжения питания.
Эффективный зазор Sэфф
Эффективный зазор Sэфф определяется при номинальном рабочем напряжении и температуре окружающей среды 25°C ± 0,5. В нем учтены производственные разбросы датчика.
0,9Sном ≤ Sэфф ≤ 1,1Sном
Полезный зазор Sпол
Полезный зазор Sпол — это расстояние переключения, учитывающее все производственные разбросы датчика, изменения температуры и напряжения.
0,81Sном ≤ Sпол ≤ 1,21Sном
Рабочий зазор Sраб
Рабочий зазор Sраб — это любое расстояние, обеспечивающее надежную работу бесконтактного выключателя в допустимых пределах температуры и напряжения.
0 ≤ Sраб ≤ 0,8Sном
Поправочный коэффициент рабочего зазора
Поправочный коэффициент дает возможность определить рабочий зазор, который зависит от металла, из которого изготовлен объект воздействия.
| Материал | Коэффициент |
| сталь 40
чугун никель нерж.сталь алюминий медь | 1,0
0,93.  ..1,05 ..1,05
0,65…0,75 0,60…1,00 0,30…0,45 0,35…0,50 0,25…0,45 |
Гистерезис выключателя H
Под гистерезисом понимается разность между точкой включения при приближении измерительной пластинки и точкой выключения при ее отдалении от бесконтактного выключателя. Величина гистерезиса указывается в % от номинального расстояния переключения.
Воспроизводимость точки переключения R
Воспроизводимость точки переключения- точность повторения расстояния переключения при двух последовательных включениях в течение 8 часов при температуре окружающей среды 25°C ± 5, напряжении, отклоняющемся от номинального на 5%, относительной влажности 50…70%.
R ≤ 0,05Sэфф
Частота переключений f
Частота переключений — это максимально возможное число переключений датчика в секунду. В качестве объекта воздействия используются стандартные измерительные пластинки с расстоянием между ними 2d.
В качестве объекта воздействия используются стандартные измерительные пластинки с расстоянием между ними 2d.
Температурный дрейф рабочего зазора
Температурный дрейф рабочего зазора — это отклонение рабочего зазора в диапазоне рабочих температур, выраженное в процентах.
Δ S / S ≤ 10%
Задержка включения
Задержка включения — это время, необходимое бесконтактному выключателю для того, чтобы полностью прийти в рабочее состояние с момента подачи питания.
Крутизна фронтов T
Крутизна фронтов выходного логического сигнала — скорость нарастания/спада напряжения выходного логического сигнала, измеренная в вольт/мкс.
Номинальная нагрузка Rном
Номинальная нагрузка — наименьшее допустимое омическое сопротивление присоединенной нагрузки.
Выходное сопротивление Ro
Выходное сопротивление — внутреннее сопротивление источника выходного сигнала.
Ток холостого хода Iо (остаточный ток Iхх)
Это ток, потребляемый бесконтактным выключателем от источника питания при отключенной нагрузке.
Номинальный ток Іном
Это ток, под действием которого выключатель может находиться длительное время.
Импульсный ток Іmах
Это наибольший допустимый импульсный ток, который может выдержать выключатель.
Защита выключателя
Это электрическая защита устройства от неправильного подключения питания, короткого замыкания выхода, бросков напряжения питания.
Рабочее напряжение Uраб
Это допустимый диапазон напряжения, при котором гарантируется надежная работа выключателя (включая пульсацию).
Расчетное рабочее напряжение Uрас
Это рабочее напряжение, используемое для испытаний без учета допустимых отклонений. Для выключателей постоянного тока Uрас=24В.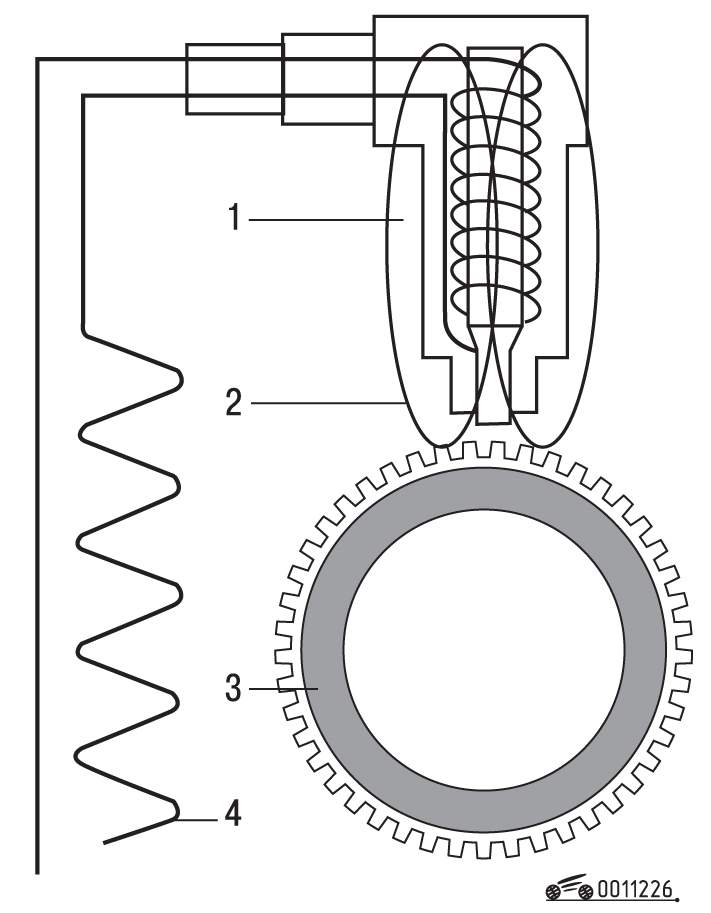 Для выключателей переменного тока и выключателей переменного/постоянного тока Uрас=110В.
Для выключателей переменного тока и выключателей переменного/постоянного тока Uрас=110В.
Падение напряжения на датчике
Это напряжение, измеренное на включенном датчике под нагрузкой при номинальном токе Iном.
Пульсация рабочего напряжения
Это отношение амплитуды переменного напряжения к номинальному рабочему напряжению (допустимый максимум 15%).
Установка датчиков в металл и относительно друг друга
Бесконтактные индуктивные выключатели, встраиваемые заподлицо в металл
Бесконтактные выключатели могут быть встроены в металл до торцевой чувствительной поверхности без изменения рабочих параметров. Между двумя соседними выключателями должно быть расстояние не менее диаметра датчика.
Бесконтактные индуктивные выключатели, не встраиваемые заподлицо в металл
Бесконтактный выключатель является не встраиваемым в металл, если для поддержания его установленных параметров требуется свободная зона (Р), в которой должны отсутствовать материалы, влияющие на данные параметры. Между двумя соседними выключателями должно быть расстояние не менее 2 х с1 активной поверхности.
Между двумя соседними выключателями должно быть расстояние не менее 2 х с1 активной поверхности.
Встречное расположение бесконтактных выключателей
Бесконтактные выключатели могут быть расположены встречно друг к другу, при этом расстояние между активными поверхностями должно быть более 3Sном.
Виды контактов
Нормально разомкнутый — «НР» (замыкающий)
Бесконтактный выключатель обеспечивает функцию замыкающего контакта при появлении в активной зоне измерительной пластинки (в исходном состоянии нагрузка отключена).
Нормально замкнутый — «НЗ» (размыкающий)
Бесконтактный выключатель обеспечивает функцию размыкающего контакта при появлении в активной зоне измерительной пластинки (в исходном состоянии нагрузка подключена).
Функция «исключающее или» (переключающий)
Бесконтактный выключатель одновременно обеспечивает функцию замыкающего и размыкающего контактов.
Постоянное напряжение
3-х, 4-х проводные схемы подключения
| Кабельное соединение | Разъемное соединение | |||
| PNP | Замыкающий контакт | 1 | ||
| Размыкающий контакт | 2 | |||
| Переключающий контакт | 3 | |||
| NPN
| Замыкающий контакт | 4
| ||
| Размыкающий контакт | 5
| |||
| Переключающий контакт | 6
| |||
2-х проводные схемы подключения
| Кабельное соединение | Разъемное соединение | |||
| Замыкающий контакт | 7
| |||
| Размыкающий контакт | 8
| |||
| Замыкающий контакт | 9
| |||
| Размыкающий контакт | 10
| |||
Переменное напряжение
Без заземления
| Кабельное соединение | Разъемное соединение | |||
| Замыкающий контакт | 11 | |||
| Размыкающий контакт | 12
| |||
С заземлением
| Замыкающий контакт | 13
| |||
| Размыкающий контакт | 14
| |||
Без заземления
|
| 15
| |||
| Размыкающий контакт | 16
| |||
С заземлением
| Замыкающий контакт | 17
| |||
| Размыкающий контакт | 18
| |||
Постоянное/переменное напряжение
Без заземления
| Кабельное соединение | Разъемное соединение | |||
| Замыкающий контакт | 19 | |||
| Размыкающий контакт | 20
| |||
С заземлением
| Замыкающий контакт | 21
| |||
| Размыкающий контакт | 22
| |||
Без заземления
|
| 23
| |||
| Размыкающий контакт | 24
| |||
С заземлением
| Замыкающий контакт | 25
| |||
| Размыкающий контакт | 26
| |||
Схема подключения с открытым коллектором
| NPN | Замыкающий контакт | 27
| ||
| Размыкающий контакт | 28
| |||
Функция «И» (последовательная)
Схема собрана из выключателей постоянного напряжения исполнения PNP с функцией «нормально разомкнутого контакта». На каждом датчике происходит падение напряжения около 1 вольта. Поэтому ограничено количество элементов «n» в схеме. Кроме того, необходимо учитывать токи холостого хода отдельных датчиков.
На каждом датчике происходит падение напряжения около 1 вольта. Поэтому ограничено количество элементов «n» в схеме. Кроме того, необходимо учитывать токи холостого хода отдельных датчиков.
Схема собрана из выключателей постоянного напряжения исполнения NPN с функцией «нормально разомкнутого контакта».
Функция «ИЛИ» (параллельная)
Схема собрана из выключателей постоянного напряжения исполнения PNP с функцией «нормально разомкнутого контакта».
Схема собрана из выключателей постоянного напряжения исполнения NPN с функцией «нормально разомкнутого контакта».
Параллельное соединение бесконтактных выключателей переменного напряжения не рекомендуется, так как в связи с нарастанием колебаний генератора могут появляться ошибочные импульсы.
Последовательная схема может быть собрана из двух выключателей переменного напряжения. В каждом датчике происходит падение напряжения около 5 вольт.
В каждом датчике происходит падение напряжения около 5 вольт.
Схема собирается из выключателя переменного напряжения и механического выключателя. Схема позволяет выключить нагрузку при включенном состоянии бесконтактного переключателя.
Эта схема обеспечивает возможность включения нагрузки при невключенном датчике.
Полезные ссылки
Принцип работы индуктивного датчика
В отличие от популярных в прошлом электромеханических выключателей индуктивные датчики относятся к оборудованию с бесконтактным принципом работы, т. е. для срабатывания датчику не требуется физический контакт с объектом. Это означает отсутствие механического износа, что оказывает существенное влияние на время жизни компонентов и исключает необходимость их обслуживания. В силу принципа действия индуктивные датчики используются в случаях, когда требуется определять металлический, либо изготовленный из магнитных/ферромагнитных материалов объект или предмет. Неметаллические объекты датчиком игнорируются.
Неметаллические объекты датчиком игнорируются.
В общем случае индуктивный датчик состоит из нескольких основных компонентов:
— металлический (чаще всего латунный или стальной), либо пластиковый корпус, в котором помещаются все компоненты датчика;
— катушка колебательного контура, находящаяся непосредственно за пластиковой или металлической т. н. чувствительной поверхностью датчика;
— генератор, создающий электромагнитное поле;
— триггер Шмитта, преобразующий аналоговый сигнал в логический дискретный;
— усилитель, обеспечивающий достаточный уровень выходного сигнала для дальнейшей его передачи;
— один или несколько светодиодных индикаторов – чаще всего для индикации срабатывания, но в отдельных случаях также указывающий на наличие питания датчика и статус конфигурирования;
— компаунд, которым заливается всё внутреннее пространство датчика для защиты электронных компонентов от попадания влаги и мелких частиц;
— кабель, клеммная коробка, либо разъём для подключения датчика.
Принцип действия индуктивного датчика основывается на изменении индуктивности катушки и сердечника – потому датчик и называется индуктивным. Он сводится к нескольких основным этапам:
— на датчик подаётся питание
— генератор вырабатывает магнитное поле в области катушки
— при попадании в область действия датчика металлического, магнитного или ферромагнитного объекта в нём наводятся вихревые токи, изменяющие амплитуду колебаний генератора
— изменение амплитуды обеспечивает выходной аналоговый сигнал
— триггер Шмитта преобразует аналоговый сигнал в логический дискретный
— усилитель повышает уровень сигнала до необходимого значения
Как и любое другое электронное устройство, индуктивный датчик обладает рядом основных и второстепенных параметров. Первые являются основными при подборе датчика для решения конкретной задачи, в то время как вторые позволяют установить пригодность датчика для использования в специфических условиях.
Принцип действия и основные параметры индуктивных датчиков положения | RuAut
Самым распространенным типом устройств в составе существующих АСУ ТП являются индуктивные датчики положения, их количество превышает 90% от всех применяемых дискретных датчиков положения. Любой технологический процесс в практически любой отрасли промышленности (пищевая, машиностроение, нефтегазовая, энергетика) требует отслеживать положение заслонок, приводов, клапанов, деталей и заготовок, подвижных элементов конструкций агрегатов и т.д. в автоматическом режиме.
Повсеместному распространению индуктивных датчиков послужили их надежность, отличные эксплуатационные характеристики и сравнительно низкая стоимость. Основными рабочими характеристиками индуктивных датчиков положения являются: диапазон срабатывания, степень защиты, рабочая температура и частота отклика.
Принцип действия индуктивных датчиков заключается в следующем. При подаче питания на датчик возбуждается первичная обмотка от переменного напряжения резонатор и тем самым создает вблизи себя электромагнитное поле.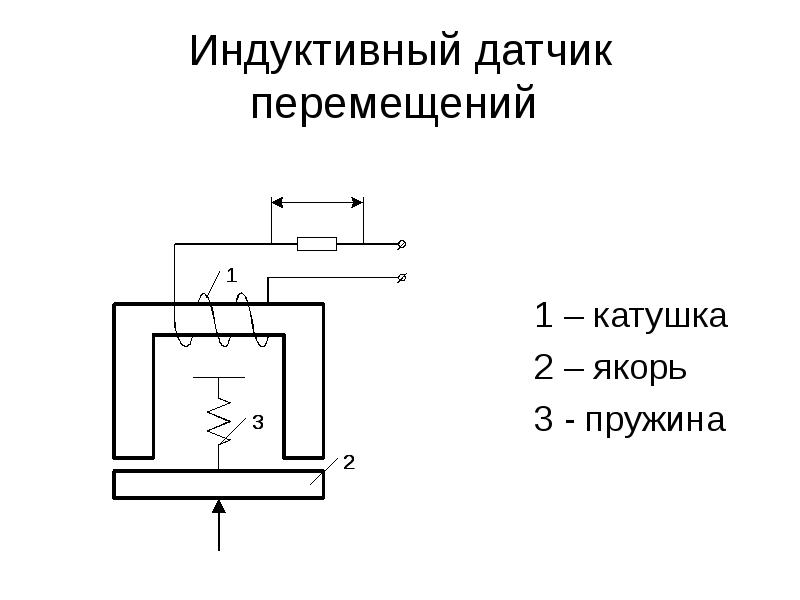 При помещении в зону действия электромагнитного поля металлического объекта, который, по сути, становится вторичной обмоткой, начинают наводиться токи вихревого характера, так называемые токи Фуко. Такое явление ведет к ухудшению добротности первичной обмотки, что в свою очередь приводит к изменению в сторону уменьшения амплитуды сигнала резонатора, из-за чего срабатывает компаратор (триггер Шмидта), далее сигнал усиливается посредством усилителя и выдается на выход датчика.
При помещении в зону действия электромагнитного поля металлического объекта, который, по сути, становится вторичной обмоткой, начинают наводиться токи вихревого характера, так называемые токи Фуко. Такое явление ведет к ухудшению добротности первичной обмотки, что в свою очередь приводит к изменению в сторону уменьшения амплитуды сигнала резонатора, из-за чего срабатывает компаратор (триггер Шмидта), далее сигнал усиливается посредством усилителя и выдается на выход датчика.
Параметры индуктивных датчиков положения и рекомендации по их применению
Чтобы правильно подобрать индуктивный датчик под определенную задачу необходимо знать ряд основных параметров, а также за какие функции эти параметры отвечают.
Наверное, главным параметром, указанным в паспорте на датчик является номинальный диапазон срабатывания. Он обозначается как Sn. Номинальный диапазон срабатывания, хотя и является основным параметром, но практического значения особо не имеет. Так как его значение получается при ряде ограничений связанных с внешними факторами, а именно: температура окружающей среды 20 градусов Цельсия, питающее напряжение 24 В постоянного или же 230 В переменного тока. А в качестве объекта должна использоваться стальная пластина, выполненная из определенной стали, квадратной формы с шириной в 3 раза больше ширины значения Sn и толщиной 1мм. Практическое же значение имеют такие параметры, как эффективный диапазон срабатывания Sr и полезный диапазон срабатывания Su. Значение Sr варьируется в пределах плюс минус 10% от номинального диапазона срабатывания, а измеряется в температурном диапазоне от 18 до 28 градусов Цельсия и при номинальном напряжении питания. Полезный диапазон срабатывания индуктивного датчика варьируется в пределах плюс минус 10% от эффективного и измеряется при напряжении питания равного 85% — 110% от номинального и температуре от -25 до +70 градусов Цельсия. Часто в техническом описании на датчик можно встретить такой параметр, как гарантированная зона (диапазон) срабатывания. Его нижняя граница равна 0, а верхняя значению 0.81Sn. Также важными параметрами индуктивных датчиков положения, влияющими на точность и достоверность измерений, являются гистерезис и повторяемость H и R соответственно.
А в качестве объекта должна использоваться стальная пластина, выполненная из определенной стали, квадратной формы с шириной в 3 раза больше ширины значения Sn и толщиной 1мм. Практическое же значение имеют такие параметры, как эффективный диапазон срабатывания Sr и полезный диапазон срабатывания Su. Значение Sr варьируется в пределах плюс минус 10% от номинального диапазона срабатывания, а измеряется в температурном диапазоне от 18 до 28 градусов Цельсия и при номинальном напряжении питания. Полезный диапазон срабатывания индуктивного датчика варьируется в пределах плюс минус 10% от эффективного и измеряется при напряжении питания равного 85% — 110% от номинального и температуре от -25 до +70 градусов Цельсия. Часто в техническом описании на датчик можно встретить такой параметр, как гарантированная зона (диапазон) срабатывания. Его нижняя граница равна 0, а верхняя значению 0.81Sn. Также важными параметрами индуктивных датчиков положения, влияющими на точность и достоверность измерений, являются гистерезис и повторяемость H и R соответственно. Гистерезисом называют расстояние между самыми дальними точками срабатывания датчика на объект при приближении и удалении последнего. Нормальным считается значение гистерезиса равное 0.2Sr.
Гистерезисом называют расстояние между самыми дальними точками срабатывания датчика на объект при приближении и удалении последнего. Нормальным считается значение гистерезиса равное 0.2Sr.
Помимо свойств присущих непосредственно самому индуктивному датчику положения на диапазон срабатывания влияют свойства материала объекта, речь идет об электропроводимости и магнитной проницаемости. Для этого было введено понятие коэффициента редукции. Эталонным материалом считается Сталь 37, ее коэффициент редукции равен 1. Для других металлов коэффициент редукции имеет значение меньше 1. Например, нержавейка имеет коэффициент редукции 0.85, а медь всего лишь 0.3. То есть, если объектом срабатывания является медь, то диапазон срабатывания уменьшается до значения равного 0.3Sn .
Далее описываются другие, но не менее важные параметры индуктивных датчиков положения.
Напряжение питания датчика
Питание индуктивных датчиков может осуществляться как от источников постоянного тока, так и источников переменного тока. Для постоянного тока характерны диапазоны напряжений: 10-30В, 10-60В и 5-60В. Для переменного тока характерен диапазон: 98-253В. Также существуют индуктивные датчики имеющие универсальное питание, такие датчики можно запитать как от источника постоянного, так и от источника переменного тока.
Для постоянного тока характерны диапазоны напряжений: 10-30В, 10-60В и 5-60В. Для переменного тока характерен диапазон: 98-253В. Также существуют индуктивные датчики имеющие универсальное питание, такие датчики можно запитать как от источника постоянного, так и от источника переменного тока.
Номинальный ток нагрузки
Параметр показывает, на какое значение тока рассчитан датчик при действии нагрузки продолжительный интервал времени. Стандартным является значение равное 200мА, но бывают спец исполнения датчиков рассчитанные и на 500мА.
Частота отклика
Параметр показывает, с какой максимальной частотой, выраженной в герцах, датчик может осуществлять переключения. Для большинства промышленных применений хватает частоты отклика равной 1000Гц, а вот поднимать частоту выше 5кГц производителям датчиков нет особого смысла, так как такая частота будет выше, частоты выполнения стандартного цикла промышленного контроллера (ПЛК). Тем самым состояние такого датчика может быть неверно интерпретировано модулем ввода ПЛК.
Индуктивные бесконтактные датчики — неконтактные переключатели
Индуктивный бесконтактный датчик используется для определения наличия или контроля положения металлических объектов или объектов, имеющих металлические части. Индуктивные датчики не реагируют на другие материалы. При появлении в зоне срабатывания металлического объекта индуктивный датчик замыкает или размыкает цепь. Поставляемые индуктивные датчики могут быть нормально замкнутыми или нормально разомкнутыми.
Принцип действия бесконтактного индуктивного датчика базируется на изменении магнитного поля,
создаваемого встроенной в
датчик катушкой индуктивности при попадании в его активную зону металлического объекта.
Бесконтактные индуктивные датчики имеют в своей конструкции LC-генератор, который создает переменное магнитное поле. При внесении в это поле металлического объекта в нем возникают вихревые токи, которые вызывают изменение амплитуды колебаний генератора. Вырабатываемый аналоговый сигнал зависит от расстояния между чувствительной поверхностью индуктивного датчика и металлическим объектом. Для подачи выходного сигнала в датчике используется триггер, который преобразует аналоговый сигнал в логический.
Под заказ возможно утопленное исполнение датчиков.
Тип NPN, нормально разомкнутые
Расстояние срабатывания индуктивного датчика зависит от формы и размеров объекта, а также от материала объекта. Максимальное расстояние срабатывания обеспечивается при железном объекте. Использование других металлов уменьшает расстояние срабатывания (см. схему).
При уменьшении размеров объекта менее стандартного, расстояние срабатывания уменьшается.
Индуктивные датчики: назначение и принцип работы, устройство индуктивного датчика
Устройство и принцип действия индуктивных и емкостных датчиков приближения
Емкостные и индуктивные датчики способны обнаруживать присутствие объекта без непосредственного контакта с ним. При этом индуктивные выключатели чувствительны только к металлическим предметам, а емкостные способны детектировать любые предметы, диэлектрическая проницаемость которых отлична от воздуха (например, воду, дерево, металл, пластик и т.д.). Рассмотрим принцип работы каждого датчика отдельно.
Основным элементом индуктивного датчика является катушка индуктивности (рисунок 2). Она подключена к генератору. Переменное электрическое напряжение на ее выводах вызывает переменное магнитное поле. Линии поля будут перпендикулярны направлению тока в витках катушки.
Рисунок 2 — Принцип работы индуктивного датчика приближения
При отсутствии вблизи катушки металлических объектов линии магнитного поля замыкаются по воздуху. А амплитуда электрических колебаний будет максимальной.
Если же к катушке приближать металлический объект, то все большая часть силовых линий начнет замыкаться через него. Индуктивность катушки начнет увеличиваться. Этот процесс схож с процессом введения сердечника. При этом рост индуктивности приведет к уменьшению амплитуды и/или частоты колебаний.
Если такую систему снабдить детектором, то по изменению амплитуды сигнала можно судить о наличии металлического объекта, его приближении или удалении.
В основе работы емкостного датчика, как следует из названия, положено использование емкостных связей. Сам датчик, по сути, представляет собой одну из обкладок пространственного конденсатора. Второй обкладкой является земля. В качестве диэлектрика выступает преимущественно воздух. Так как диэлектрическая проницаемость воздуха мала (ε=1), то емкость такого конденсатора не велика. Если же к датчику начинает приближаться некоторый объект с более высоким значением ε, то суммарная емкость начнет увеличиваться (рисунок 3).
Рисунок 3 — Принцип работы емкостного датчика приближения
Таким образом, по величине емкости можно судить о наличии объекта, его приближении или удалении. При этом материал объекта может быть практически любым, важным является только значение его диэлектрической проницаемости.
Как правило, для измерения используются схемы с преобразованием емкости в частоту или амплитуду колебаний, которые измеряются с помощью детектора. В итоге, как и в случае с индуктивным датчиком необходимо наличие двух обязательных элементов: генератора и детектора (рисунок 4).
Рисунок 4 — Структурные схемы датчиков приближения
Емкостные и индуктивные выключатели имеют выходной сигнал релейного типа (включен или выключен) (рисунок 5). По этой причине, схема датчиков имеет переключательный элемент — триггер, который для предотвращения ложных срабатываний снабжен гистерезисом.
Рисунок 5 — Формирование выходных сигналов выключателей
Рассмотрим основные характеристики бесконтактных выключателей.
Индуктивные датчики положения чувствительны к внешнему магнитному полю
Современные автоматы создают больше случайных магнитных полей, чем когда-либо прежде, вызывая проблемы с датчиками Холла и магниторецепторами. Индуктивные датчики положения используют активную демодуляцию, чтобы отфильтровать поля рассеяния (рисунок ниже).
Электромобили следующего поколения могут иметь рабочий ток в несколько сотен ампер, идущих от аккумуляторов к тяговому электродвигателю. Кроме того, большинство автомобилей имеют более трех бесщеточных двигателей постоянного тока (BLDC) для обеспечения движения автомобиля, электронное рулевое управление с усилителем и вспомогательный тормозной двигатель. Все эти системы генерируют магнитные поля рассеяния.
Из-за быстрого нарастания паразитных магнитных полей новые спецификации требуют большего количества испытаний на устойчивость к сильным магнитным полям. В автомобильной промышленности автомобильная электроника в настоящее время подвергается воздействию поля постоянного тока в 4 мТл при оценке электромагнитной совместимости (EMC) и дает ложные показания в любом из критичных для безопасности датчиков — гидроусилитель руля, педаль акселератора, положение тягового электродвигателя.
Прелесть индуктивного определения положения в том, что оно невосприимчиво к этим шумам, потому что оно активно фильтрует только частоту, необходимую для восприятия. Поскольку индуктивные датчики положения не используют магнитный материал, они не воспринимают
магнитное поле постоянного тока. Другими словами, закон Фарадея не работает для статического магнитного поля.
Кроме того, описанный выше синхронный демодулятор отфильтровывает другие частоты выше и ниже основной частоты возбуждения, почти так же, как вы можете выбрать одну радиостанцию AM, когда антенна принимает всю полосу AM. Такой же тип фильтрации невозможен при использовании эффекта Холла и магниторезистивных датчиков.
Характеристики индуктивных датчиков
Чем отличаются датчики.
Конструкция, вид корпуса
Тут два основных варианта – цилиндрический и прямоугольный. Другие корпуса применяются крайне редко. Материал корпуса – металл (различные сплавы) или пластик.
Расстояние переключения (рабочий зазор)
Это то расстояние до металлической пластины, на котором гарантируется надёжное срабатывание датчика. Для миниатюрных датчиков это расстояние – от 0 до 2 мм, для датчиков диаметром 12 и 18 мм – до 4 и 8 мм, для крупногабаритных датчиков – до 20…30 мм.
Количество проводов для подключения
Подбираемся к схемотехнике.
2-проводные. Датчик включается непосредственно в цепь нагрузки (например, катушка пускателя). Так же, как мы включаем дома свет. Удобны при монтаже, но капризны к нагрузке. Плохо работают и при большом, и при маленьком сопротивлении нагрузки.
2-проводный датчик. Схема включения
Нагрузку можно подключать в любой провод, для постоянного напряжения важно соблюдать полярность. Для датчиков, рассчитанных на работу с переменным напряжением – не играет роли ни подключение нагрузки, ни полярность
Можно вообще не думать, как их подключать. Главное – обеспечить ток.
3-проводные. Наиболее распространены. Есть два провода для питания, и один – для нагрузки. Подробнее расскажу отдельно.
4- и 5-проводные. Такое возможно, если используется два выхода на нагрузку (например, PNP и NPN (транзисторные), или переключающие (реле). Пятый провод – выбор режима работы или состояния выхода.
Виды выходов датчиков по полярности
У всех дискретных датчиков может быть только 3 вида выходов в зависимости от ключевого (выходного) элемента:
Релейный. Тут всё понятно. Реле коммутирует необходимое напряжение либо один из проводов питания. При этом обеспечивается полная гальваническая развязка от схемы питания датчика, что является основным достоинством такой схемы. То есть, независимо от напряжения питания датчика, можно включать/выключать нагрузку с любым напряжением. Используется в основном в крупногабаритных датчиках.
Транзисторный PNP. Это – PNP датчик. На выходе – транзистор PNP, то есть коммутируется “плюсовой” провод. К “минусу” нагрузка подключена постоянно.
Транзисторный NPN. На выходе – транзистор NPN, то есть коммутируется “минусовой”, или нулевой провод. К “плюсу” нагрузка подключена постоянно.
Можно чётко усвоить разницу, понимая принцип действия и схемы включения транзисторов. Поможет такое правило: Куда подключен эмиттер, тот провод и коммутируется. Другой провод подключен к нагрузке постоянно.
Ниже будут даны схемы включения датчиков, на которых будет хорошо видно эти отличия.
Виды датчиков по состоянию выхода (НЗ и НО)
Какой бы ни был датчик, один из основных его параметров – электрическое состояние выхода в тот момент, когда датчик не активирован (на него не производится какое-либо воздействие).
Выход в этот момент может быть включен (на нагрузку подается питание) либо выключен. Соответственно, говорят – нормально закрытый (нормально замкнутый, НЗ) контакт либо нормально открытый (НО) контакт. В иностранной аппаратуре, соответственно – NС и NО.
То есть, главное, что надо знать про транзисторные выходы датчиков – то, что их может быть 4 разновидности, в зависимости от полярности выходного транзистора и от исходного состояния выхода:
- PNP NO
- PNP NC
- NPN NO
- NPN NC
Контакты датчиков также могут быть с задержкой включения или выключения. Про такие контакты также сказано в статье про приставки выдержки времени ПВЛ. А почему датчики, отвечающие за безопасность, должны быть обязательно с НЗ контактами – см. статью про Цепи безопасности в промышленном оборудовании.
Положительная и отрицательная логика работы
Это понятие относится скорее к исполнительным устройствам, которые подключаются к датчикам (контроллеры, реле).
ОТРИЦАТЕЛЬНАЯ или ПОЛОЖИТЕЛЬНАЯ логика относится к уровню напряжения, который активизирует вход.
ОТРИЦАТЕЛЬНАЯ логика: вход контроллера активизируется (логическая “1”) при подключении к ЗЕМЛЕ. Клемму S/S контроллера (общий провод для дискретных входов) при этом необходимо соединить с +24 В=. Отрицательная логика используется для датчиков типа NPN.
ПОЛОЖИТЕЛЬНАЯ логика: вход активизируется при подключении к +24 В=. Клемму контроллера S/S необходимо соединить с ЗЕМЛЕЙ. Используйте положительную логику для датчиков типа PNP. Положительная логика применяется чаще всего.
Продолжение статьи – здесь >>>. Во второй части даны реальные схемы и рассмотрено практическое применение различных типов датчиков с транзисторным выходом.
Резервные индуктивные датчики требуют вдвое больше места
Важные автомобильные и промышленные приложения часто нуждаются в резервировании питания для обеспечения высочайшего уровня безопасности. Оптимизируя слои печатной платы и некоторые интеллектуальные методы первичной обмотки, двойной датчик не требует двойного пространства на печатной плате. Вместо этого оба датчика могут находиться в одном и том же пространстве печатной платы (рисунок ниже). В этом случае они имеют одно и то же магнитное поле, и при этом обеспечивают гальваническую развязку. Вторичные устройства могут обращаться к двум микросхемам, которые затем выводят в независимую и резервную позиции, что повышает безопасность приложения.
Как подключить контактор
Особенности подключения светодиодных лент
При подключении контактора сразу нужно определиться с механизмом, который он будет включать. Это может быть двигатель, насос, вентилятор, нагревательные элементы, компрессоров и т. д. Главной особенность контактора, отличающего его от автомата, является отсутствие всякой защиты. Поэтому продумывая цепи включения электрооборудования через контактор обязательно необходимо учесть ограничивающие ток и нагрев элементы. Для ограничения и отключения оборудования при коротких замыканиях и превышающих во много раз номинал нагрузках используются предохранители и автоматы. От длительного незначительно превышения номинальных токов работающего оборудования применяются тепловые реле.
Для того чтобы правильно подключить контактор в схему нужно чётко понимать какие из контактов силовые, а какие из них вспомогательные, то есть блок-контакты. Также нужно посмотреть на номиналы катушки включения. Там должны быть указаны напряжение его тип и величина, а также токи которые через неё протекают для нормальной работы. Во время работы силовые контакты могут погорать, поэтому их необходимо регулярно осматривать и чистить.
Как подключить модульный контактор
Модульный контактор — это разновидность обычных таких же аппаратов для коммутации, только применяются они в основном для включения и отключения распределительных щитков дистанционно. То есть включая его, подаётся питание на группу автоматов, каждый из которых, отвечает за свою определённую цепь. Устанавливается он на DIN — рейке. Может коммутировать как цепи постоянного, так и переменного тока.
Подключение контактора через кнопку
Для подключения контактора через кнопку нужно изучить ниже приложенную схему. Она предназначена для пуска нагрузки, в данном случае двигателя, от контактора катушка которого рассчитана на 220 Вольт переменного напряжения. В зависимости от напряжения стоит продумать её питание. Поэтому при покупке и выборе контактора стоит учесть этот нюанс. Так как если электромагнит будет рассчитан на постоянное напряжение, то понадобится именно такой источник.
При нажатии на кнопку пуск катушка электромагнита контактора получит питание и он включится. Замкнутся силовые контакты, тем самым подастся напряжение на асинхронный двигатель. Также замкнётся блок-контакт контактора К1, который подключен параллельно кнопке стоп. Он называется электриками контакт самоподхвата, так как именно он подаёт питание на включающую катушку после того, как кнопка пуска отпускается. При нажатии на кнопку стоп от электромагнита отключается питание, силовые элементы контактора разрывают цепь и двигатель отключается.
Подключение контактора с тепловым реле
Тепловое реле предназначено для недопускания длительных незначительных токовых перегрузок во время работы электрооборудования, ведь перегрев отрицательно сказывается на состоянии изоляции. Частые превышения температуры и токов приведут к её разрушению, а значит и к короткому замыканию, и выходу из строя дорогостоящего исполнительного элемента.
При повышении тока в цепи статора электродвигателя элементы теплового реле КК будут нагреваться. При достижении заданной температуры, которая может быть регулирована, тепловое реле сработает и его контакты разорвут цепь катушки электромагнита контактора КМ.
В целях безопасности нужно помнить, что работа в цепи контактора должна производиться при полном обесточивании его. При этом автомат питания должен быть заблокирован ключом или запрещающим плакатом от несанкционированного, или ошибочного включения. А также нельзя включать этот аппарат со снятыми дугогасительными камерами, это приведут к короткому замыканию.
Принцип действия
Всё базируется на изменении амплитуды колебаний используемого в индуктивном датчике генератора, когда в активную зону вносится предмет определённого размера из металлического, магнитного и ферро-магнитного материала. Так что использование может быть реализовано только с этими типами. Когда подаётся питание на конечный выключатель, расположенный в его области чувствительности, то образуется магнитное поле. Оно наводит в материале вихревые токи, влияние которых меняет амплитуду колебаний генератора. В конечном результате таких преобразований получается аналоговый выходной сигнал. Его величина меняется и зависит от расстояния между контролируемым предметом и датчиком. Триггер Шмитта превращает аналоговый сигнал в логический. Индуктивный датчик перемещения играет важную роль для механизмов, которые отслеживают изменение местоположения металлических деталей. Встретить подобные устройства вы можете в автомобильных конвейерах. Индуктивный датчик положения поможет определить, расположен ли предмет так, как должен. Если ответ отрицательный, то будут предприняты действия, предусмотренные программой, чтобы всё было так, как необходимо для полноценной и правильной работы конвейера.
3.6. Емкостные датчики
П
ринципдействия емкостных измерительных
преобразователей основан на изменении
емкости конденсатора под воздействием
входной преобразуемой величины. Емкость
конденсатора:
где ε — относительная
диэлектрическая проницаемость
диэлектрика;
ε
— диэлектрическая проницаемость
вакуума;
S
— площадь
пластины;
δ — толщина
диэлектрика или расстояние между
пластинами.
Емкостные
преобразователи используют для измерения
угловых и линейных перемещений, линейных
размеров, уровня, усилий, влажности,
концентрации и др. Конструктивно они
могут быть выполнены с плоскопараллельными,
цилиндрическими, штыревыми электродами,
с диэлектриком между пластинами и без
него.
Емкостный
плоскопараллельный измерительный
преобразователь с изменяемой площадью
перекрытияS
(cм.
рис. 3.8, а)
описывается
уравнением преобразования:
где а
— ширина
пластин конденсатора;
X
— длина
перекрытия электродов.
а) б) в)
Рисунок 3.8 Схемы
емкостных датчиков с различными
измеряемыми параметрами.
Рисунок 3.9 Емкостной
датчик для измерения угловых велечин
Емкостные
преобразователи перемещения с переменной
площадью перекрытия (рис. 3.9) используют
и для измерения угловых величин. В этом
случае емкость измерительного
преобразователя:
(3.2)
а чувствительность:
(3.3)
где r2,
r1
— соответственно
наружный и внутренний радиусы пластин;
φ, φ
— соответственно текущий (измеряемый)
и начальный углы перекрытия пластин.
Емкостный
плоскопараллельный преобразователь
перемещения с изменяющимся воздушным
зазором(см.
рис. 3.8, б) имеет
нелинейную характеристику. Изменение
его емкости описывается уравнением:
где δ
— начальный зазор;
X
— перемещение
пластины.
В связи с нелинейностью
статической характеристики такие
датчики применяют для измерения
относительно малых перемещений, обычно
не более 0,1δ.
Преобразователи
с изменяемой диэлектрической проницаемостью
среды ε
между электродами (см. рис. 3.8, в)
широко используют
для измерения уровня жидких и сыпучих
веществ, анализа состава и концентрации
веществ в химической, нефтеперерабатывающей
и других областях промышленности, для
счета изделий, охранной сигнализации
и т.п. Они имеют линейную статическую
характеристику.
Емкость измерительных
преобразователей в зависимости от
конструктивных особенностей колеблется
от десятых долей до нескольких тысяч
пикофарад, что приводит к необходимости
использовать для питания датчиков
напряжение повышенной частоты — от
1•103
до 108
Гц. Это один из существенных недостатков
подобных преобразователей.
К достоинствам
емкостных измерительных преобразователей
можно отнести простоту конструкции,
малые размеры и массу, высокую
чувствительность, большую разрешающую
способность при малом уровне входного
сигнала, отсутствие подвижных токосъемных
контактов, высокое быстродействие,
возможность получения необходимого
закона преобразования за счет выбора
соответствующих конструктивных
параметров, отсутствие влияния выходной
цепи на измерительную.
Недостатки емкостных
измерительных преобразователей состоят
в относительно низком уровне выходной
мощности сигналов, нестабильности
характеристик при изменении параметров
окружающей среды, влиянии паразитных
емкостей.
Общие сведения
Индукционный датчик представляет собой специальное приспособление, относящееся к бесконтактным. Это значит, что для определения местоположения объекта в пространстве ему не требуется непосредственный контакт с ним. Благодаря такой технологии, возможна автоматизация производственного процесса.
Как правило, приспособление применяется в различных линиях и системах на крупных заводах и фабриках. Его также можно использовать в качестве конечного выключателя. Прибор отличается высоким качеством и надежностью, работает даже в сложных условиях. Оказывает воздействие только на металлические предметы, поскольку другие материалы к нему нечувствительны.
Приспособление довольно устойчиво к агрессивным химическим веществам, широко применяется в машиностроительной, пищевой и текстильной промышленности. Аэрокосмическая, военная и железнодорожная отрасль также не обходится без этих датчиков.
Маркировка при подключении
На принципиальных схемах индуктивные датчики принято обозначать в виде ромба или квадрата с двумя вертикальными линиями внутри. Нередко в них также указывается тип выхода (нормально открытый или закрытый), соответствующий одной из разновидностей полупроводниковых транзисторов. В большинстве вариантов схем указывается нормально закрытая группа или оба типа в одном корпусе.
Цветовая маркировка выводов
Перед установкой датчика необходимо сверить данные с инструкциейНа практике применяется стандартная система маркировки выводов датчиков индуктивности, которой придерживаются все без исключения производители чувствительных приборов. Тем не менее, перед их монтажом рекомендуется внимательно следить за полярностью подключения и обязательно сверяться с прилагаемой к изделиям инструкцией.
На корпусах всех датчиков имеется рисунок с цветной маркировкой проводов, если это позволяют его размеры.
Стандартный порядок обозначения:
- синий (Blue) всегда означает минусовую шину питания;
- коричневым цветом (Brown) обозначается плюсовой проводник;
- черный (Black) соответствует выходу датчика;
- белый (White) – это дополнительный выход или вход.
Для уточнения последнего маркировочного обозначения его следует сверить с данными инструкции, прилагаемой к конкретному прибору.
Индуктивный датчик: принцип действия и устройство
Индуктивный датчик является очень распространенным устройством, входящим в состав низового оборудования в автоматизированных системах управления производством. Устройства широко применяются в машиностроении, текстильной, пищевой и других отраслях промышленности.
Наиболее эффективно приборы используются в станках в качестве конечных выключателей, а также в автоматических линиях.
При этом индуктивные датчики реагируют только на металлы, оставаясь нечувствительными к другим материалам. Данное свойство позволяет увеличить защищенность устройств от помех, вводя в их зону чувствительности различные смазки, эмульсии и другие вещества, что не вызовет ложного срабатывания.
Объектами, на которые воздействует индуктивный датчик положения, являются различные металлические детали: кулачки, ползуны, зубья шестеренок. Во многих случаях может применяться прикрепленная к деталям оборудования пластина.
По статистике, из всех используемых датчиков положения более 90 процентов приходится на индуктивные устройства.
Это можно объяснить их отличными эксплуатационными характеристиками, низкой стоимостью и одновременно высокой надежностью, чего нельзя сказать о других приборах.
Бесконтактный выключатель (индуктивный датчик) работает по следующим принципам. Входящий в состав устройства генератор производит электромагнитное поле, которое взаимодействует с объектом. Необходимую длительность сигнала управления и гистерезис при переключении обеспечивает триггер. Усилитель позволяет увеличить до необходимого значения амплитуду сигнала.
Расположенный в датчике световой индикатор обеспечивает оперативность настройки, контроль работоспособности и показывает состояние выключателя. Для защиты от проникновения в устройство воды и твердых частиц используется компаунд. Корпус изделия позволяет монтировать индуктивный датчик приближения и защищает приспособление от механических воздействий. Его изготавливают из полиамида или латуни, комплектуя метизными компонентами.
В процессе работы устройства при подаче напряжения катушкой индуктивности генератора создается переменное магнитное поле, которое располагается перед активной поверхностью выключателя. При попадании в зону чувствительности объекта воздействия происходит снижение качества контура и амплитуды колебаний. В результате происходит срабатывание триггера и изменяется состояние выхода выключателя.
Индуктивный датчик имеет некоторые особенности применения. Он может распознавать различные группы металлов, благодаря отсутствию износа и механического воздействия является долговечным приспособлением. Устройства комплектуют с помощью механизмов защиты от короткого замыкания и перегрузок.
Они имеют стойкость к высокому давлению, впускаются в различных вариантах для применения при высоких (до 150 Сo) и низких (от – 60 Со) температурах. Индуктивный датчик обладает устойчивостью к активным химическим средам, может иметь аналоговый или дискретный выход для определения положения относительно устройства объекта воздействия.
Индуктивные датчики положения могут измерять только линейные перемещения
В то время как линейное измерение является определенным преимуществом этого метода, индуктивные датчики положения могут также измерять траектории объекта вращения и измерения движения по дуге с теми же преимуществами более высокой точности и лучшей помехоустойчивости. Педали
автомобиля, воздушные или водяные клапаны и положение ротора — все это примеры датчиков, в которых можно использовать индуктивную технологию.
Думайте о поворотном датчике на 360 градусов как о линейном сенсоре, концы которого изогнуты, чтобы они могли соприкасаться друг с другом. Оказывается, что поворотные индуктивные датчики положения являются наиболее точными, потому что генерируемое магнитное поле может быть очень однородным при любом радиусе. Благодаря этой технологии возможны линейные, дуговые и вращательные измерения.
Погрешности
Погрешности в процессе преобразования диагностических значений оказывают влияние на способности индукционных датчиков выдавать достоверную информацию. К основным из них можно отнести следующие.
Электромагнитная
Данную погрешность принято учитывать только в качестве случайной величины. Как правило, она возникает в ходе индуцирования ЭДС в индукционной катушке в результате внешнего воздействия сторонними магнитными полями. Это происходит в процессе производства из-за силовых электроустройств. Они образуют магнитные поля, что впоследствии и формирует электромагнитную погрешность.
От температуры
Эта погрешность тоже выступает в качестве случайного значения, поскольку работа большого числа элементов индукционного датчика напрямую зависит от температурных показателей, поэтому это ключевая величина, которая даже учитывается в процессе проектировки подобного оборудования.
Магнитной упругости
Обычно такая погрешность может проявляться как следствие нестабильности деформации магнитопровода устройства в процессе сборки самого датчика, а также при деформационных изменениях во время работы. Кроме того, оказываемое нестабильным электронапряжением воздействие на магнитопровод оборудования вызывает снижение качества передаваемого сигнала на выходе.
Деформация элементов
Данная погрешность, как правило, проявляется в результате воздействия измеряющей силы на значение деформации частей индукционного датчика, а также под влиянием усилий, оказываемых на нестабильные деформирующие процессы. Кроме того, не меньшее влияние на нее могут оказывать люфты и зазоры, образовавшиеся в подвижных элементах конструкции устройства.
Кабеля
Такая погрешность обычно проявляется от непостоянного значения сопротивления, в случае деформации самого провода и под влиянием температуры. Также подобным образом может сказаться наводка внешними полями ЭДС в кабеле.
Старение
Данная погрешность может проявляться при износе движущихся элементов самого устройства, а также в случае постоянно изменяющихся магнитных свойств используемого магнитопровода. Ее принято считать, строго говоря, случайным значением. В процессе определения данной погрешности учитывают кинематику конструкции индукционного датчика, а во время проектирования подобного оборудования максимальный эксплуатационный срок рекомендуется определять только при работе в обычном режиме, чтобы при этом износ не успел превысить установленного значения.
Технологии
Погрешности технологии проявляются в случае отклонений от технического процесса производства, при явном разбросе технических параметров катушек и остальных элементов во время сборки, влиянии допущенных зазоров при соединении устройства. Для ее измерения принято использовать механическое измерительное оборудование.
Индукционный датчик
Индукционный датчик представляет собой индуктивную катушку 5, надетую на разделительную трубку из немагнитной стали, в которой перемещается укрепленный на поплавке 3 плунжер 4 с сердечником из ферромагнитного материала.
| Зависимость индуктивности магнитоупругого датчика от силы сжатия. |
Индукционные датчики предназначены для преобразования скорости линейных и угловых перемещений в ЭДС. Они относятся к датчикам генераторного типа.
Индукционные датчики являются наиболее распространенным классом активных датчиков как по заложенным в них принципам действия, так и по назначению и конструктивному воплощению. Они могут быть постоянного и переменного тока ( однофазные и многофазные) и обычно используются для контроля частоты вращения, углового ускорения, угла поворота, скорости и ускорения линейного перемещения. Эти датчики могут выдавать значительные выходные сигналы как по напряжению, так и по мощности, в широком диапазоне изменения контролируемой величины имеют практически линейную характеристику, хорошо противостоят кратковременным механическим и электрическим перегрузкам, просты в обращении.
Индукционные датчики отличаются тем, что имеют две раздельные обмотки, неподвижную, через которую пропускают постоянный ток, и подвижную.
Индукционные датчики состоят из магнитного сердечника и одной или двух катушек индуктивности. Принцип работы индукционных датчиков состоит в том, что неэлектрические величины тем или иным путем приводят к взаимному перемещению магнитного сердечника и катушки индуктивности. При этом в катушке возбуждается ЭДС индукции. Для измерения скорости вращения или возвратно-поступательного движения применяются импульсные датчики. Выходной величиной таких датчиков является частота импульсов.
Индукционный датчик состоит из текстолитового каркаса, на котором имеются первичная и вторичная обмотки. Вторичная обмотка выполнена по дифференциальной схеме из двух последовательно соединенных обмоток. Первичная обмотка катушки питается переменным током напряжением 12 б от блока местной автоматики типа БМА.
Индукционный датчик действует в принципе аналогично предыдущему, но перемещение тела, сближая или удаляя друг от друга две катушки или вдвигая и выдвигая сердечник катушки, изменяет самоиндукцию катушки.
| Реостатный преобразователь. |
Индукционные датчики, индуктивность которых меняется вследствие изменения магнитного сопротивления магнитопровода.
| Датчик для измерения величины трещины. |
Индукционные датчики 12 ( см. рис. 53) предназначены для измерения величины раскрытия трещин разрыва пласта. Они работают по принципу изменения индукционного сопротивления катушки при перемещении внутри последней ферритового стержня. Один из концов стержня закреплен на стенке трещины. Перемещения стенки в вертикальном направлении непосредственно воспринимаются ферритовым стержнем. Сигналы, снятые с катушек, через специальный усилитель поступают или на специальный милливольтметр или на вход осциллографа Я-700. Длина хода стержня составляет 3 мм. Это вполне достаточно для условий экспериментов. Установка нуля достигается простым смещением катушек 12 относительно ферритовых стержней.
Индукционный датчик — электромеханическое устройство, предназначенное для преобразования угловых и линейных перемещений в модулированное напряжение. Принцип действия индукционных датчиков и преобразователей основан на изменении коэффициента взаимоиндукции М между подвижным и неподвижным элементами при изменении их относительного положения.
Индукционный датчик ( реле контроля скорости) схематически изображен на рис. VII. Вокруг той же оси может поворачиваться кольцо 3 с корот-козамкнутой обмоткой 4 типа беличьего колеса. При вращении вала / с магнитом в обмотке 4 индуктируется ток, и кольцо 3 стремится повернуться в сторону вращения вала.
Индукционные датчики часто используются как датчики скорости. Если использовать дифференцирующие и интегрирующие цепочки, то можно получить выходные величины, пропорциональные ускорению и перемещению.
Индуктивный датчик. Принцип работы и подключение
Индуктивный датчик (inductive sensor) – это датчик бесконтактного типа, предназначенный для контроля положения объектов из металла.
Принцип работы
Работа индуктивного датчика основана на взаимодействии магнитного поля катушки, расположенной внутри датчика, и металла, из которого состоит объект.
При приближении металлического объекта (5) к катушке (3), магнитное поле (4) изменяется, что в свою очередь заставляет компаратор (2) сформировать сигнал, который впоследствии поступит на усилитель (1) и далее в цепь управления.
Параметры
Напряжение питания – диапазон напряжения, при котором датчик работает корректно.
Максимальный ток переключения — количество непрерывного тока, которое пропускаясь через датчик, не вызывает повреждение датчика.
Минимальный ток переключения — минимальное значение тока, которое должно протекать через датчик, чтобы гарантировать работу.
Рабочее расстояние (Sn) – максимальное расстояние от поверхности датчика, до квадратного куска железа толщиной 1 мм в осевом направлении. Расстояние будет уменьшаться для других материалов, зависимость Sn от материала представлена в таблице.
|
Железо |
1 x Sn |
|
Нержавеющая сталь |
0,9 х Sn |
|
Латунь — бронза |
0,5 x Sn |
|
Алюминий |
0,4 x Sn |
|
Медь |
0,4 x Sn |
Частота переключения — максимальное количество переключений датчика в секунду.
Способ подключения
Способ подключения зависит от типа индуктивного датчика.
Трехпроводные – два вывода отвечают за питание датчика, а третий подключается к нагрузке. В зависимости от структуры (NPN или PNP) нагрузка подключается к положительному (NPN) или отрицательному (PNP) полюсу источника постоянного напряжения.
Четырехпроводные – два вывода питания, два вывода подключаются к нагрузке.
Существуют также двух и пятипроводные датчики, но используются они реже из-за особенностей подключения.
Индуктивный датчик LJ12A3-4-Z/BX
Рассмотрим стандартный датчик, который наиболее часто используется в ЧПУ-станках или 3d-принтерах в качестве концевого выключателя. Датчик имеет 3 вывода и NPN структуру. Размеры датчика 12×50мм, расстояние обнаружения 4мм. Напряжение питания 6-36 В.
На реальном примере продемонстрируем работу датчика. В качестве нагрузки подключаем светодиод с токоограничивающим резистором, а затем подносим металлическую пластину к датчику.
На расстоянии менее 4 мм от пластины, датчик срабатывает и подает напряжение на нагрузку через нормально разомкнутый контакт (NO).
Определения:
НЕТ (нормально разомкнутый): Релейный выход, запрещающий разомкнуть ток, когда исполнительный механизм отсутствует и закрывается, позволяя текущий поток при наличии привода.
NC (нормально замкнутый): Релейный выход, замкнутый, позволяющий протекание тока при отсутствии привода и запрещение открывания текущий поток при наличии привода.
NPN Выход: Транзисторный выход, который переключает общий или отрицательное напряжение на нагрузке. Нагрузка подключается между положительное питание и выход. Текущие потоки из нагрузка через выход на землю, когда выход переключателя на. Также известен как снижение тока или отрицательное переключение.
PNP Выход: Транзисторный выход, переключающий положительное напряжение. к нагрузке.Нагрузка подключается между выходом и общим. Ток течет от выхода устройства через нагрузку к заземление, когда выход переключателя включен. Также известен как текущий источник или положительное переключение.
Эксплуатация Distance (Sn): Максимальное расстояние от датчика до квадратный кусок железа (Fe 37), толщиной 1 мм со сторонами = до диаметр чувствительной поверхности, который вызовет изменение на выходе датчика.Расстояние уменьшится для других материалы и формы. Испытания проводятся при 20ºC с источник постоянного напряжения. Это расстояние действительно включает ± Допуск изготовления 10%.
Мощность Supply: Диапазон напряжения питания, в котором будет работать датчик. в.
Макс Коммутируемый ток: Допустимая величина постоянного тока протекать через датчик, не вызывая повреждения датчика.Это максимальное значение.
Мин. Ток переключения: Это минимальное значение тока, которое должен протекать через датчик, чтобы гарантировать работу.
Макс Пиковый ток: Максимальный пиковый ток указывает на максимальное значение. текущее значение, которое датчик может выдержать в течение ограниченного периода времени времени.
Остаточная Ток: Ток, протекающий через датчик при он находится в открытом состоянии.
Мощность Сток: Величина тока, необходимая для работы датчика.
Напряжение Падение: Падение напряжения на датчике при движении максимальная загрузка.
Короткий Защита цепи: Защита от повреждения датчика если нагрузка закорочена.
Эксплуатация Частота: Максимальное количество циклов включения / выключения, которое устройство способно за одну секунду. Согласно EN 50010, этот параметр измеряется динамическим методом, показанным на инжир. 1 с датчиком в положениях (a) и (b). S — операционная расстояние, а м — диаметр датчика. Частота дается формулой на рис.2.
Повторяемость (% Sn): Разница между любыми значениями рабочего расстояния измеряется за 8 часов при температуре от 15 до 15 до 30ºC и напряжения питания с отклонением <= 5%.
Гистерезис (% Sn): Расстояние между точками «включения» приближение исполнительного механизма и точка «выключения» привод отступает.Это расстояние снижает количество ложных срабатываний. Его значение выражается в процентах от рабочего расстояния. или расстояние. См. Рис.3
Промывка Монтаж: Для монтажа рядом с моделями для скрытого монтажа см. рис. 4а. Модели без скрытого монтажа можно встраивать в металл согласно рис. 4б. бок о бок см. на рис. 4c. Sn = рабочее расстояние.
Защита
Степень: Степень защиты корпуса согласно IEC.
(Международная электротехническая комиссия):
IP 65: Пыленепроницаемость. Защита от водяных струй.
IP 67: пыленепроницаемость. Защита от воздействия погружения
Принцип работы индуктивного датчика приближения
Привет, гики, здесь мы обсудим принцип работы индуктивного датчика приближения, их широкое применение в промышленности и их использование в коммерческих целях.Этот блог посвящен технологии, лежащей в основе индуктивных датчиков приближения, и подробным характеристикам.
Что такое индуктивный датчик приближения?
Индуктивный датчик приближения обнаруживает металлический объект, который находится рядом с их активной стороной. Этот датчик работает по электрическому принципу индуктивности, когда колеблющийся ток индуцирует электродвижущую силу (ЭДС) в целевом объекте. Эти бесконтактные датчики приближения обнаруживают объекты из черных металлов, в идеале — низкоуглеродистую сталь толщиной более одного миллиметра.Они состоят из четырех основных компонентов: , ферритового сердечника с катушками, генератора, триггера Шмитта и выходного усилителя . Этот датчик имеет 2 основных версии:
.- Неэкранированный: электромагнитное поле, создаваемое катушкой, не ограничено, что позволяет увеличивать и увеличивать расстояние срабатывания
- Экранировано: генерируемое электромагнитное поле сосредоточено спереди, где стороны катушки датчика закрыты.
ДОЛЖЕН ПРОЧИТАТЬ:
Принцип работы индуктивного датчика приближения
Генератор создает симметричное колеблющееся магнитное поле, которое излучается ферритовым сердечником и матрицей катушек на чувствительной поверхности.Когда железная цель попадает в это магнитное поле, небольшие независимые электрические токи (вихревые токи), составляющие , индуцируют на поверхности металла.
Индуктивный датчик приближения работает в диапазоне частот от 10 до 20 Гц переменного тока или от 500 Гц до 5 кГц постоянного тока. Из-за ограничений магнитного поля индуктивные датчики имеют относительно узкий диапазон чувствительности, в среднем от долей миллиметра до 60 мм.
Из-за этого на датчик будет создаваться нагрузка, уменьшающая амплитуду электромагнитного поля.Если металлический объект движется к датчику приближения, вихревой ток соответственно увеличивается. Таким образом, нагрузка на осциллятор увеличится, что уменьшит амплитуду поля.
Блок триггера Шмитта контролирует амплитуду генератора, и на определенном уровне (заданном уровне) схема триггера включает или выключает датчик. Если металлический объект или цель отодвинуть от датчика приближения, амплитуда осциллятора увеличится.
На изображении выше показана форма сигнала генератора индуктивного датчика приближения в присутствии цели и в отсутствие цели.
В настоящее время доступны индуктивные датчики приближения с различным рабочим напряжением. Эти индуктивные датчики приближения доступны в режимах переменного, постоянного и переменного / постоянного тока (универсальные режимы). Рабочий диапазон цепей датчиков приближения составляет от 10 В до 320 В постоянного тока и от 20 В до 265 В переменного тока.
Преимущества индуктивных датчиков приближения
- Бесконтактное обнаружение
- Приспособляемость к окружающей среде — устойчивость к обычным условиям, наблюдаемым в промышленных зонах, таким как пыль и грязь
- Возможность и универсальность в обнаружении металлов
- Высокая частота переключения
- Отсутствие движущихся частей, продление срока службы
Недостатки индуктивных датчиков приближения
- Отсутствие дальности обнаружения, в среднем максимальная дальность до 60 мм
- Обнаруживает только металлические предметы
- Внешние условия, такие как экстремальные температуры, смазочно-охлаждающая жидкость или химические вещества, влияют на работу датчика.
Применение индуктивных датчиков приближения
- Сборы за проезд, конвейер, автомобилестроение
- Обнаружение металлических деталей в суровых условиях
- Высокоскоростные движущиеся части
Надеюсь, эта статья поможет вам понять полный принцип работы индуктивного датчика приближения.
Мы в Robu.in надеемся, что вам было интересно, и что вы вернетесь к другим нашим образовательным блогам.
Как работают индуктивные датчики
- 3 декабря 2012 г.
- Элемент
Сводка
- Марк Ховард, Zettlex
Терминология и методы использования индуктивных датчиков могут сбивать с толку.В этой статье объясняются различные типы и принципы работы, а также их сильные и слабые стороны.
декабрь 2012 г.
Марк Ховард, Zettlex
Индуктивные датчики широко используются для измерения положения или скорости, особенно в суровых условиях. Однако для многих инженеров терминология и методы индуктивных датчиков могут сбивать с толку. Индуктивные датчики положения и скорости бывают самых разных форм, размеров и конструкций.Можно сказать, что все индуктивные датчики работают на принципах трансформатора, и все они используют физическое явление, основанное на переменных электрических токах. Это впервые заметил Майкл Фарадей в 1830-х годах, когда он обнаружил, что первый проводник с током может «индуцировать» ток, протекающий во втором проводнике. Открытия Фарадея привели к созданию электродвигателей, динамо-машин и, конечно же, индуктивных датчиков положения и скорости. К таким датчикам относятся простые бесконтактные переключатели, датчики переменной индуктивности, датчики переменного сопротивления, синхронизаторы, резольверы, поворотные и линейно регулируемые дифференциальные трансформаторы (RVDT и LVDT). Различные типы В простом датчике приближения (иногда называемом датчиком приближения или прокси-переключателем) на устройство подается электроэнергия, которая заставляет переменный ток течь в катушке (иногда называемой петлей, катушкой или обмоткой). Когда проводящая или магнитопроницаемая цель, такая как стальной диск, приближается к катушке, это изменяет импеданс катушки. Когда порог пройден, это действует как сигнал о наличии цели. Датчики приближения обычно используются для обнаружения простого присутствия или отсутствия металлической цели, а электрический выходной сигнал часто имитирует переключение.Эти датчики широко используются во многих промышленных приложениях, где электрические контакты в традиционном переключателе в противном случае могут оказаться проблематичными, особенно там, где присутствует много грязи или воды. Вы увидите множество индуктивных датчиков приближения в следующий раз, когда будете мыть машину. Датчики переменной индуктивности и переменного магнитного сопротивления обычно вырабатывают электрический сигнал, пропорциональный смещению проводящего или магнитопроницаемого объекта (обычно стального стержня) относительно катушки.Как и в случае с датчиком приближения, импеданс катушки изменяется пропорционально смещению цели относительно катушки, на которую подается переменный ток. Такие устройства обычно используются для измерения смещения поршней в цилиндрах, например, в пневматических или гидравлических системах. Поршень может проходить по внешнему диаметру змеевика. Синхросигналы измеряют индуктивную связь между катушками при их движении относительно друг друга. Обычно они вращаются и требуют электрических соединений как с движущимися, так и с неподвижными частями (обычно называемыми ротором и статором).Они могут предложить чрезвычайно высокую точность и используются в промышленной метрологии, в радиолокационных антеннах и телескопах. Синхросигналы, как известно, дороги и в настоящее время встречаются все реже, в основном их заменяют (бесщеточные) резольверы. Это еще одна форма индуктивного детектора, но электрические соединения выполняются только с обмотками статора. LVDT, RVDT и резольверы измеряют изменение индуктивной связи между катушками, обычно называемыми первичной и вторичной обмотками. Первичная обмотка передает энергию во вторичные обмотки, но соотношение энергии, подводимой к каждой из вторичных обмоток, изменяется пропорционально относительному смещению магнитопроницаемой мишени.В LVDT это обычно металлический стержень, проходящий через отверстие обмоток. В RVDT или резольвере это обычно ротор или полюсный наконечник определенной формы, который вращается относительно обмоток, расположенных по периферии ротора. Типичные применения LVDT и RVDT включают гидравлические сервоприводы в аэрокосмических элеронах, двигателях и элементах управления топливной системой. Типичные области применения резольверов включают переключение бесщеточных электродвигателей. Существенным преимуществом индуктивных датчиков является то, что соответствующие схемы обработки сигналов не должны располагаться в непосредственной близости от чувствительных катушек.Это позволяет размещать чувствительные катушки в суровых условиях, что в противном случае могло бы помешать другим методам измерения, таким как магнитные или оптические, поскольку они требуют размещения относительно чувствительной электроники на основе кремния в точке измерения. Приложения Индуктивные датчики имеют большой опыт надежной работы в сложных условиях. Следовательно, они часто автоматически выбираются для приложений, связанных с безопасностью, критически важных для безопасности или приложений с высокой надежностью.Такие приложения распространены в военной, аэрокосмической, железнодорожной и тяжелой промышленности. Причина такой солидной репутации связана с базовой физикой и принципами работы, которые, как правило, не зависят от:
- подвижные электрические контакты
- температура
- влажность, вода и конденсат
- посторонние предметы, такие как грязь, жир, песок и песок.
Сильные и слабые стороны Из-за характера основных рабочих элементов — обмоток и металлических деталей — большинство индуктивных датчиков чрезвычайно надежны.Учитывая их солидную репутацию, возникает очевидный вопрос: «Почему индуктивные датчики не используются чаще?» Причина в том, что их физическая надежность работает как сильная сторона, так и слабость. Индуктивные датчики, как правило, точные, надежные и прочные, но при этом большие, громоздкие и тяжелые. Большой объем материала и необходимость в тщательно намотанных катушках делают их производство дорогостоящим, особенно высокоточные устройства, требующие прецизионной намотки. Помимо простых датчиков приближения, более сложные индуктивные датчики непомерно дороги для многих основных, коммерческих или промышленных приложений.Другая причина относительной редкости индуктивных датчиков заключается в том, что инженеру-конструктору может быть сложно их указать. Это связано с тем, что для каждого датчика часто требуется отдельная спецификация и покупка соответствующей схемы генерации переменного тока и обработки сигналов. Это часто требует значительных навыков и знаний в области аналоговой электроники. Поскольку молодые инженеры, как правило, сосредоточены на цифровой электронике, они будут рассматривать такие дисциплины как нежелательное «черное искусство», которого следует избегать. Устройства нового поколения Однако в последние годы на рынке появилось новое поколение индуктивных датчиков, которые завоевывают растущую репутацию не только на традиционных рынках, но также в промышленном, автомобильном, медицинском, коммунальном, научном, нефтегазовом секторах. В этом новом поколении индуктивных датчиков используются те же основы физики, что и в традиционных устройствах, но используются печатные платы и современная цифровая электроника, а не громоздкие конструкции трансформаторов и аналоговая электроника.Этот подход элегантен и также открывает ряд приложений для индуктивных датчиков, включая датчики 2D и 3D, линейные устройства с коротким ходом (<1 мм), криволинейные геометрии и высокоточные датчики угла. Использование печатных схем позволяет печатать датчики на тонких гибких подложках, что также может устранить необходимость в традиционных кабелях и разъемах. Гибкость этого подхода - как физическая, так и благодаря способности быстро предоставлять индивидуальные конструкции для OEM-производителей - является основным преимуществом этого нового подхода.Как и традиционные индукционные методы, этот подход обеспечивает надежные и точные измерения в суровых условиях. Также есть несколько важных преимуществ:
- Стоимость снижена
- Повышенная точность
- Уменьшенная масса
- Упрощенное машиностроение, например, удаление подшипников, уплотнений и втулок.
- Компактный размер — особенно с длиной хода по сравнению с традиционными LVDT.
- Упрощение электрического интерфейса — обычно источник постоянного тока и абсолютный цифровой сигнал.
О Zettlex UK Ltd: Zettlex — это сенсорная компания. Линейка датчиков компании точно и надежно измеряет положение или скорость даже в суровых условиях. Zettlex разрабатывает и производит датчики; поставляет компоненты датчиков и интегральные схемы. Компания предлагает индивидуальный дизайн и разработку датчиков для конкретных приложений клиентов.
Учить большеВам понравилась эта замечательная статья?
Ознакомьтесь с нашими бесплатными электронными информационными бюллетенями, чтобы прочитать больше отличных статей ..
ПодписатьсяО датчиках магнитной индукции | CONTROL & SENSING
О датчиках магнитной индукции
Датчики магнитной индукции MURATEC по методу магнитной индукции и фазового детектирования изобретены оригинальной оригинальностью
Принцип работы датчика датчиков магнитной индукции
Датчики магнитной индукцииMURATEC состоят из магнитного вещества, которое движется в цепи преобразования, первой катушке обмотки, второй катушке обмотки и катушке.
Обменное магнитное поле создается путем возбуждения первой обмотки первым обменным сигналом, который становится стандартом. Поскольку магнитное вещество движется в обмотке второй катушки, второй, расположенной в позиции в обменном магнитном поле, получаются два выхода индукции, соответствующие каждому положению двух катушек.
|
Характеристики
Миниатюризация достигается датчиком абсолютного выхода.
Датчики магнитной индукции достигли миниатюризации с абсолютным обнаружением, приняв структуру датчика простого метода магнитной индукции и оригинальной схемы обнаружения.Более того, это соответствует обнаружению шкалы длины путем отсчета абсолютной высоты тона.
Отличное повторение символа
Датчики магнитной индукцииопределяют смещение и положение, преобразуя механическое смещение в фазовую задержку (время) между сигналами и измеряя это время. В результате достигается отличный характер повторения.
Высокая точность и высокое разрешение
Датчики магнитной индукцииполучают высокое разрешение за счет согласования размера механического смещения первичного детектирующего элемента с двумя двумя радианами величины сдвига фазы преобразовательной части и деления 16 битов величины сдвига фазы (это равно делению на 65536 ).
Температурный дрейф контролируется не менее
Датчики магнитной индукциисостоят из электромагнитной катушки. Величина температурного дрейфа регулируется, подавляется в преобразователе, и датчики магнитной индукции могут быть подавлены до минимума, хотя температурный дрейф возникает из-за изменения сопротивления в зависимости от температуры обмотки.
Он прочен в плохих условиях.
Основной чувствительный элемент датчиков магнитной индукции устойчив к вибрации и ударам, потому что он состоит только из электромагнитной катушки, а также обладает превосходной устойчивостью к воздействию масла, пыли и температуры.И т. Д. Также можно настроить часть преобразования во влиянии окружающей среды на небольшое удаленное пространство.
Не требует обслуживания
Датчики магнитной индукциине требуют обслуживания благодаря полному бесконтактному обнаружению. Эффективность демонстрируется в достаточной степени во всех средах благодаря достижению структуры, которая не позволяет легко справиться с влиянием грязи.
В сочетании с линейкой датчиков магнитной индукции и преобразователем
Muratec имеет множество датчиков магнитной индукции, которые соответствуют широкому диапазону прямолинейных перемещений от ультракороткого до длинного хода.Наилучшая конструкция системы достигается за счет соответствия продукции легкости, небольшого размера, превосходной производительности и экономичности, а также различий в зависимости от состояния и назначения и выбора. Кроме того, предлагается преобразователь, который изменяет характеристики датчика перемещения в соответствии с назначением за счет гибкой комбинации.
Тип и классификация Датчики магнитной индукции
Комбинация датчиков магнитной индукции и преобразователя
【Датчики приближения】 Типы, принципы работы и области применения
Датчики приближения используются в различных устройствах.Бесконтактные датчики находят широкое применение от базовых бытовых до крупномасштабных. Основная функция датчиков приближения — обнаружение объектов. Обнаружение материала или объекта по близости приводит к инициированию определенного действия. Действие, инициируемое при обнаружении, предопределено. Обнаружение объекта с помощью датчика приближения происходит без физического контакта датчика с объектом. В датчике приближения для его работы используется ряд методов обнаружения.
Типы датчиков приближения:Типы датчиков приближения
Датчики приближения делятся на разные категории в зависимости от их обнаружения. Некоторые датчики приближения используются для обнаружения материалов, тогда как некоторые используются для обнаружения различных условий окружающей среды в соответствии с этими классификациями. Типы датчиков приближения следующие:
Емкостный:Емкостные датчики приближения используют изменение емкости датчика, чтобы сделать вывод об обнаружении объекта.Механизм для этой категории довольно прост, в котором датчик действует как отдельная пластина конденсатора, а объект действует как еще одна пластина или источник напряжения для объекта. Воздух — это диэлектрический материал между этими двумя потенциалами. Как только объект попадает в диэлектрик пластин, емкость конденсатора изменяется. Это изменение принято за обнаружение объекта.
Индуктивная:Бесконтактные датчики индуктивного типа срабатывают по изменению индуктивности датчика.Этот тип датчиков приближения используется с металлическими предметами. При изменении тока в проводнике изменяется и индуктивность цепи. Это изменение индуктивности вызывает обнаружение объекта. Эти датчики приближения не могут обнаружить объекты, обладающие непроводящими свойствами. Тип обнаруженного материала может повлиять на диапазон этих датчиков, поскольку разные материалы имеют разные свойства проводимости.
Принципы работыПринцип работы датчика приближения
Принцип обнаружения индуктивных датчиков приближения Индуктивные датчики приближенияобнаруживают магнитные потери из-за вихревых токов, которые генерируются на проводящей поверхности внешним магнитным полем.Магнитное поле переменного тока создается на катушке обнаружения, и обнаруживаются изменения импеданса из-за вихревых токов, возникающих на металлическом объекте.
Другие методы включают в себя датчики обнаружения алюминия, которые обнаруживают фазовую составляющую частоты, и цельнометаллические датчики, в которых рабочая катушка используется для обнаружения только измененной составляющей импеданса. Существуют также датчики импульсного отклика, которые генерируют вихревой ток в импульсах и определяют изменение во времени вихревого тока с напряжением, индуцированным в катушке.
Принцип обнаружения емкостных датчиков приближенияЕмкостные датчики приближения обнаруживают изменения емкости между обнаруживаемым объектом и датчиком. Величина емкости зависит от размера и расстояния до объекта обнаружения. Обычный емкостный датчик приближения похож на конденсатор с двумя параллельными пластинами, в котором определяется емкость двух пластин. Одна из пластин — это измеряемый объект (с воображаемой землей), а другая — чувствительная поверхность датчика.Обнаруживаются изменения в емкости, возникающей между этими двумя полюсами.
Объекты, которые можно обнаружить, зависят от их диэлектрической проницаемости, но помимо металлов они содержат смолу и воду.
Применение датчиков приближенияПрименение датчиков приближения
Датчики приближения имеют множество применений. Самым основным является обнаружение объектов. Это приложение близости очень полезно. Например, в сотовых телефонах датчики приближения являются неотъемлемыми частями.В разных инженерных проектах используются разные датчики приближения для разных функций. Датчики приближения также используются на стоянках, в системах обнаружения обрыва листа и конвейерных системах.
>>> Где купить датчики приближения
% PDF-1.2 % 1 0 obj > эндобдж 3 0 obj > эндобдж 4 0 объект > эндобдж 5 0 obj > / Ж 6 0 Р >> эндобдж 8 0 объект > эндобдж 9 0 объект > эндобдж 10 0 obj > эндобдж 11 0 объект > эндобдж 12 0 объект > эндобдж 13 0 объект > эндобдж 14 0 объект > эндобдж 15 0 объект > эндобдж 16 0 объект > эндобдж 17 0 объект > эндобдж 18 0 объект > эндобдж 19 0 объект > эндобдж 20 0 объект > эндобдж 21 0 объект > эндобдж 22 0 объект > эндобдж 23 0 объект > эндобдж 24 0 объект > эндобдж 25 0 объект > эндобдж 26 0 объект > эндобдж 27 0 объект > эндобдж 28 0 объект > эндобдж 29 0 объект > эндобдж 30 0 объект > эндобдж 31 0 объект > эндобдж 32 0 объект > эндобдж 33 0 объект > эндобдж 34 0 объект > эндобдж 35 0 объект > эндобдж 36 0 объект > эндобдж 37 0 объект > эндобдж 38 0 объект > эндобдж 39 0 объект > эндобдж 40 0 объект > эндобдж 41 0 объект > эндобдж 42 0 объект > эндобдж 43 0 объект > эндобдж 44 0 объект > эндобдж 45 0 объект > эндобдж 46 0 объект > эндобдж 47 0 объект > эндобдж 48 0 объект > эндобдж 49 0 объект > эндобдж 50 0 объект > эндобдж 51 0 объект > эндобдж 52 0 объект > эндобдж 53 0 объект > эндобдж 54 0 объект > эндобдж 55 0 объект > эндобдж 56 0 объект > эндобдж 57 0 объект > эндобдж 58 0 объект > эндобдж 59 0 объект > эндобдж 60 0 объект > эндобдж 61 0 объект > эндобдж 62 0 объект > эндобдж 63 0 объект > эндобдж 64 0 объект > эндобдж 65 0 объект > эндобдж 66 0 объект > эндобдж 67 0 объект > эндобдж 68 0 объект > эндобдж 69 0 объект > эндобдж 70 0 объект > эндобдж 71 0 объект > эндобдж 72 0 объект > эндобдж 73 0 объект > эндобдж 74 0 объект > эндобдж 75 0 объект > эндобдж 76 0 объект > эндобдж 77 0 объект > эндобдж 78 0 объект > эндобдж 79 0 объект > эндобдж 80 0 объект > эндобдж 81 0 объект > эндобдж 82 0 объект > эндобдж 83 0 объект > эндобдж 84 0 объект > эндобдж 85 0 объект > эндобдж 86 0 объект > эндобдж 87 0 объект > эндобдж 88 0 объект > эндобдж 89 0 объект > эндобдж 90 0 объект > эндобдж 91 0 объект > эндобдж 92 0 объект > эндобдж 93 0 объект > эндобдж 94 0 объект > эндобдж 95 0 объект > эндобдж 96 0 объект > эндобдж 97 0 объект > эндобдж 98 0 объект > эндобдж 99 0 объект > эндобдж 100 0 объект > эндобдж 101 0 объект > эндобдж 102 0 объект > эндобдж 103 0 объект > эндобдж 104 0 объект > эндобдж 105 0 объект > эндобдж 106 0 объект > эндобдж 107 0 объект > эндобдж 108 0 объект > эндобдж 109 0 объект > эндобдж 110 0 объект > эндобдж 111 0 объект > эндобдж 112 0 объект > эндобдж 113 0 объект > эндобдж 114 0 объект > эндобдж 115 0 объект > эндобдж 116 0 объект > эндобдж 117 0 объект > эндобдж 118 0 объект > эндобдж 119 0 объект > эндобдж 120 0 объект > эндобдж 121 0 объект > эндобдж 122 0 объект > эндобдж 123 0 объект > эндобдж 124 0 объект > эндобдж 125 0 объект > эндобдж 126 0 объект > эндобдж 127 0 объект > эндобдж 128 0 объект > эндобдж 129 0 объект > эндобдж 130 0 объект > эндобдж 131 0 объект > эндобдж 132 0 объект > эндобдж 133 0 объект > эндобдж 134 0 объект > эндобдж 135 0 объект > эндобдж 136 0 объект > эндобдж 137 0 объект > эндобдж 138 0 объект > эндобдж 139 0 объект > эндобдж 140 0 объект > эндобдж 141 0 объект > эндобдж 142 0 объект > эндобдж 143 0 объект > эндобдж 144 0 объект > эндобдж 145 0 объект > эндобдж 146 0 объект > эндобдж 147 0 объект > эндобдж 148 0 объект > эндобдж 149 0 объект > эндобдж 150 0 объект > эндобдж 151 0 объект > эндобдж 152 0 объект > эндобдж 153 0 объект > эндобдж 154 0 объект > эндобдж 155 0 объект > эндобдж 156 0 объект > эндобдж 157 0 объект > эндобдж 158 0 объект > эндобдж 159 0 объект > эндобдж 160 0 объект > эндобдж 161 0 объект > эндобдж 162 0 объект > эндобдж 163 0 объект > эндобдж 164 0 объект > эндобдж 165 0 объект > эндобдж 166 0 объект > эндобдж 167 0 объект > эндобдж 168 0 объект > эндобдж 169 0 объект > эндобдж 170 0 объект > эндобдж 171 0 объект > эндобдж 172 0 объект > эндобдж 173 0 объект > эндобдж 174 0 объект > эндобдж 175 0 объект > эндобдж 176 0 объект > эндобдж 177 0 объект > эндобдж 178 0 объект > эндобдж 179 0 объект > эндобдж 180 0 объект > эндобдж 181 0 объект > эндобдж 182 0 объект > эндобдж 183 0 объект > эндобдж 184 0 объект > эндобдж 185 0 объект > эндобдж 186 0 объект > эндобдж 187 0 объект > эндобдж 188 0 объект > эндобдж 189 0 объект > эндобдж 190 0 объект > эндобдж 191 0 объект > эндобдж 192 0 объект > эндобдж 193 0 объект > эндобдж 194 0 объект > эндобдж 195 0 объект > эндобдж 196 0 объект > эндобдж 197 0 объект > эндобдж 198 0 объект > эндобдж 199 0 объект > эндобдж 200 0 объект > эндобдж 201 0 объект > эндобдж 202 0 объект > эндобдж 203 0 объект > эндобдж 204 0 объект > эндобдж 205 0 объект > эндобдж 206 0 объект > эндобдж 207 0 объект > эндобдж 208 0 объект > эндобдж 209 0 объект > эндобдж 210 0 объект > эндобдж 211 0 объект > эндобдж 212 0 объект > эндобдж 213 0 объект > эндобдж 214 0 объект > эндобдж 215 0 объект > эндобдж 216 0 объект > эндобдж 217 0 объект > поток HWcgWT︊XE + CKe & ˾B «
Принцип работы датчика | Валин
Ферритовый сердечник
Индуктивный датчик приближения состоит из катушки и ферритового сердечника, схемы генератора и детектора, а также твердотельного выхода (рис. 1).Генератор создает высокочастотное поле, излучаемое катушкой перед датчиком с центром вокруг оси катушки. Ферритовый сердечник связывает и направляет электромагнитное поле вперед.
Когда металлический объект попадает в высокочастотное поле, на поверхности цели индуцируются вихревые токи. Это приводит к потере энергии в контуре генератора и, как следствие, к меньшей амплитуде колебаний. Схема детектора распознает конкретное изменение амплитуды и генерирует сигнал, который включает или выключает твердотельный выход.Когда металлический объект покидает зону чувствительности, генератор восстанавливается, позволяя датчику вернуться в нормальное состояние.
Встраиваемый (экранированный) vs. немонтажный (неэкранированный)
Встраиваемая конструкция включает металлическую ленту, которая окружает ферритовый сердечник и катушку. Это помогает «связать» или направить электромагнитное поле к передней части датчика.
Датчики без встраивания не имеют этой металлической ленты; поэтому они имеют большее рабочее расстояние и чувствительны к боку.
Uprox и Uprox + Характеристики
• Отсутствие поправочного коэффициента — одинаковое номинальное рабочее расстояние для всех металлов.
• Увеличенное рабочее расстояние — до 400% больше, чем у стандартных индуктивных датчиков при использовании мишеней из цветных металлов (Рисунок 4).
• Устойчивость к сварочному полю — Uprox не подвержен влиянию сильных электромагнитных полей переменного или постоянного тока благодаря своей уникальной запатентованной конструкции.
• Высокая частота переключения — до 10 раз быстрее, чем стандартные индуктивные датчики.
• Расширенный температурный диапазон — Uprox может выдерживать температуры до 85 ° C (+ 185 ° F) с отклонением температуры ± 15%.
Принцип работы Uprox и Uprox +
TURCK Uprox — это запатентованная разработка индуктивных датчиков следующего поколения, в которой используется система с несколькими катушками. Активная катушка (и) индуцирует завихрение
эти вихревые токи влияют на токи на металлической мишени и пассивной катушке (ах). Черные и цветные металлы одинаково действуют на две катушки.Следовательно, все металлы, в том числе оцинкованные, имеют одинаковое номинальное рабочее расстояние.
В стандартных индуктивных датчиках TURCK используется одна катушка, произвольно намотанная на ферритовый сердечник. Одиночная катушка наводит вихревые токи на металлическую цель и подвержена этим вихревым токам. Черные и цветные металлы по-разному влияют на датчик, что делает невозможным обнаружение обоих типов металлов на одном номинальном рабочем расстоянии.
Сравнение рабочих расстояний датчиков Uprox и стандартных индуктивных датчиков.
.