Механическая работа — определение, формула, виды, свойства
Для нас привычно понятие «работа» в бытовом смысле. Работая, мы совершаем какое-либо действие, чаще всего полезное. В физике (если точнее, то в механике) термин «работа» показывает, какую силу в результате действия приложили, и на какое расстояние тело в результате действия этой силы переместилось.
Например, нам нужно поднять велосипед по лестнице в квартиру. Тогда работа будет определяться тем, сколько весит велосипед и на каком этаже (на какой высоте) находится квартира.
Механическая работа — это физическая величина, прямо пропорциональная приложенной к телу силе и пройденному телом пути.
Чтобы рассчитать работу, нам необходимо умножить численное значение приложенной к телу силы F на путь, пройденный телом в направлении действия силы S. Работа обозначается латинской буквой А.
Механическая работа А = FS A — механическая работа [Дж] F — приложенная сила [Н] S — путь [м] |
Если под действием силы в 1 ньютон тело переместилось на 1 метр, то данной силой совершена работа в 1 джоуль.
Поскольку сила и путь — векторные величины, в случае наличия между ними угла формула принимает вид.
| Механическая работа А = FScosα A — механическая работа [Дж] F — приложенная сила [Н] S — путь [м] α — угол между векторами силы и перемещения [°] |
Числовое значение работы может становиться отрицательным, если вектор силы противоположен вектору скорости. Иными словами, сила может не только придавать телу скорость для совершения движения, но и препятствовать уже совершаемому перемещению. В таком случае сила называется противодействующей.
Иными словами, сила может не только придавать телу скорость для совершения движения, но и препятствовать уже совершаемому перемещению. В таком случае сила называется противодействующей.
Для совершения работы необходимы два условия:
- чтобы на тело действовала сила,
- чтобы происходило перемещение тела.
Сила, действующая на тело, может и не совершать работу. Например, если кто-то безуспешно пытается сдвинуть с места тяжелый шкаф. Сила, с которой человек действует на шкаф, не совершает работу, поскольку перемещение шкафа равно нулю.
Запомнить!
Работа равна нулю, если:
- при приложенной силе перемещение отсутствует;
- сила не приложена и тело перемещается по инерции;
- угол между векторами силы и перемещения равен 90°.

Полезная и затраченная работа
Был такой мифологический персонаж у древних греков — Сизиф. За то, что он обманул богов, те приговорили его после смерти вечно таскать огромный булыжник вверх по горе, откуда этот булыжник скатывался — и так без конца. В общем, Сизиф делал совершенно бесполезное дело с нулевым КПД. Поэтому бесполезную работу и называют «сизифов труд».
Чтобы разобраться в понятиях полезной и затраченной работы, давайте пофантазируем и представим, что Сизифа помиловали и камень больше не скатывается с горы, а КПД перестал быть нулевым.
Полезная работа в этом случае равна потенциальной энергии, приобретенной булыжником. Потенциальная энергия, в свою очередь, прямо пропорциональна высоте: чем выше расположено тело, тем больше его потенциальная энергия. Выходит, чем выше Сизиф прикатил камень, тем больше полезная работа.
Потенциальная энергия Еп = mgh m — масса тела [кг] g — ускорение свободного падения [м/с2] h — высота [м] На планете Земля g ≈ 9,8 м/с2 |
Затраченная работа в нашем примере — это механическая работа Сизифа.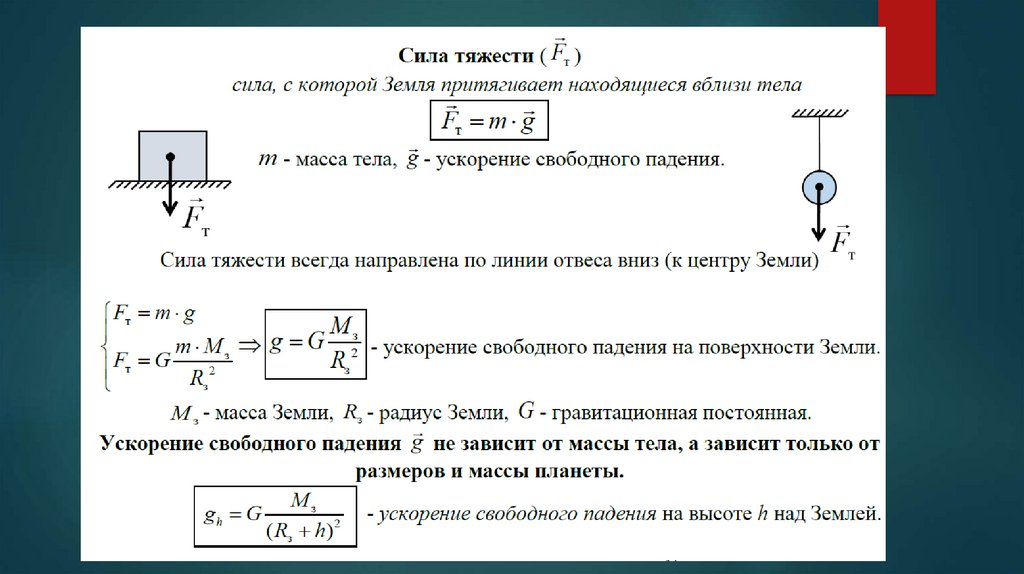 Механическая работа зависит от приложенной силы и пути, на протяжении которого эта сила была приложена.
Механическая работа зависит от приложенной силы и пути, на протяжении которого эта сила была приложена.
Механическая работа А = FS A — механическая работа [Дж] F — приложенная сила [Н] S — путь [м] |
И как же достоверно определить, какая работа полезная, а какая затраченная?
Все очень просто! Задаем два вопроса:
За счет чего происходит процесс?
Ради какого результата?
В примере выше процесс происходит ради того, чтобы тело поднялось на какую-то высоту, а значит — приобрело потенциальную энергию (для физики это синонимы).
Происходит процесс за счет энергии, затраченной Сизифом — вот и затраченная работа.
Мощность
На заводах по всему миру большинство задач выполняют машины. Например, если нам нужно закрыть крышечками тысячу банок колы, аппарат сделает это в считанные минуты. У человека эта задача заняла бы намного больше времени. Получается, что машина и человек выполняют одинаковую работу за разные промежутки времени. Для того, чтобы описать скорость выполнения работы, нам потребуется понятие мощности.
Мощностью называется физическая величина, равная отношению работы ко времени ее выполнения.
Мощность N = A/t N — мощность [Вт] A — механическая работа [Дж] t — время [с] |
Один ватт — это мощность, при которой работа в один джоуль совершается за одну секунду.
Также для мощности справедлива другая формула:
Мощность N = Fv N — мощность [Вт] F — приложенная сила [Н] v — скорость [м/с] |
Как и для работы, для мощности справедливо правило знаков: если векторы направлены противоположно, значение мощности будет отрицательным.
Поскольку сила и скорость — векторные величины, в случае наличия между ними угла формула принимает следующий вид:
Мощность N = Fvcosα N — мощность [Вт]F — приложенная сила [Н] v — скорость [м/с] α — угол между векторами силы и скорости [°] |
Практикующий детский психолог Екатерина Мурашова
Бесплатный курс для современных мам и пап от Екатерины Мурашовой. Запишитесь и участвуйте в розыгрыше 8 уроков
Запишитесь и участвуйте в розыгрыше 8 уроков
Примеры решения задач
Задача 1
Ложка медленно тонет в большой банке меда. На нее действуют сила тяжести, сила вязкого трения и выталкивающая сила. Какая из этих сил при движении тела совершает положительную работу? Выберите правильный ответ:
Выталкивающая сила.
Сила вязкого трения.
Сила тяжести.
Ни одна из перечисленных сил.
Решение
Поскольку ложка падает вниз, перемещение направлено вниз. В ту же сторону, что и перемещение, направлена только сила тяжести. Это значит, что она совершает положительную работу.
Ответ: 3.
Задача 2
Ящик тянут по земле за веревку по горизонтальной окружности длиной L = 40 м с постоянной по модулю скоростью. Модуль силы трения, действующей на ящик со стороны земли, равен 80 H. Чему равна работа силы тяги за один оборот?
Модуль силы трения, действующей на ящик со стороны земли, равен 80 H. Чему равна работа силы тяги за один оборот?
Решение
Поскольку ящик тянут с постоянной по модулю скоростью, его кинетическая энергия не меняется. Вся энергия, которая расходуется на работу силы трения, должна поступать в систему за счет работы силы тяги. Отсюда находим работу силы тяги за один оборот:
Ответ: 3200 Дж.
Задача 3
Тело массой 2 кг под действием силы F перемещается вверх по наклонной плоскости на расстояние l = 5 м. Расстояние тела от поверхности Земли при этом увеличивается на 3 метра. Вектор силы F направлен параллельно наклонной плоскости, модуль силы F равен 30 Н. Какую работу при этом перемещении в системе отсчета, связанной с наклонной плоскостью, совершила сила F?
Решение
В данном случае нас просят найти работу силы F, совершенную при перемещении тела по наклонной плоскости. Это значит, что нас интересуют сила F и пройденный путь. Если бы нас спрашивали про работу силы тяжести, мы бы считали через силу тяжести и высоту.
Это значит, что нас интересуют сила F и пройденный путь. Если бы нас спрашивали про работу силы тяжести, мы бы считали через силу тяжести и высоту.
Работа силы определяется как скалярное произведение вектора силы и вектора перемещения тела. Следовательно:
A = Fl = 30 * 5 = 150 Дж
Ответ: 150 Дж.
Задача 4
Тело движется вдоль оси ОХ под действием силы F = 2 Н, направленной вдоль этой оси. На рисунке приведен график зависимости проекции скорости vx тела на эту ось от времени t. Какую мощность развивает эта сила в момент времени t = 3 с?
Решение
На графике видно, что проекция скорости тела в момент времени 3 секунды равна 5 м/с.
Мощность можно найти по формуле N = Fv.
N = FV = 2×5 = 10 Вт
Ответ: 10 Вт.
Попробуйте онлайн-курс подготовки к ЕГЭ по физике с опытным преподавателем в Skysmart!
Лабораторная работа № 1 «Измерение ускорения тела при равноускоренном движении»
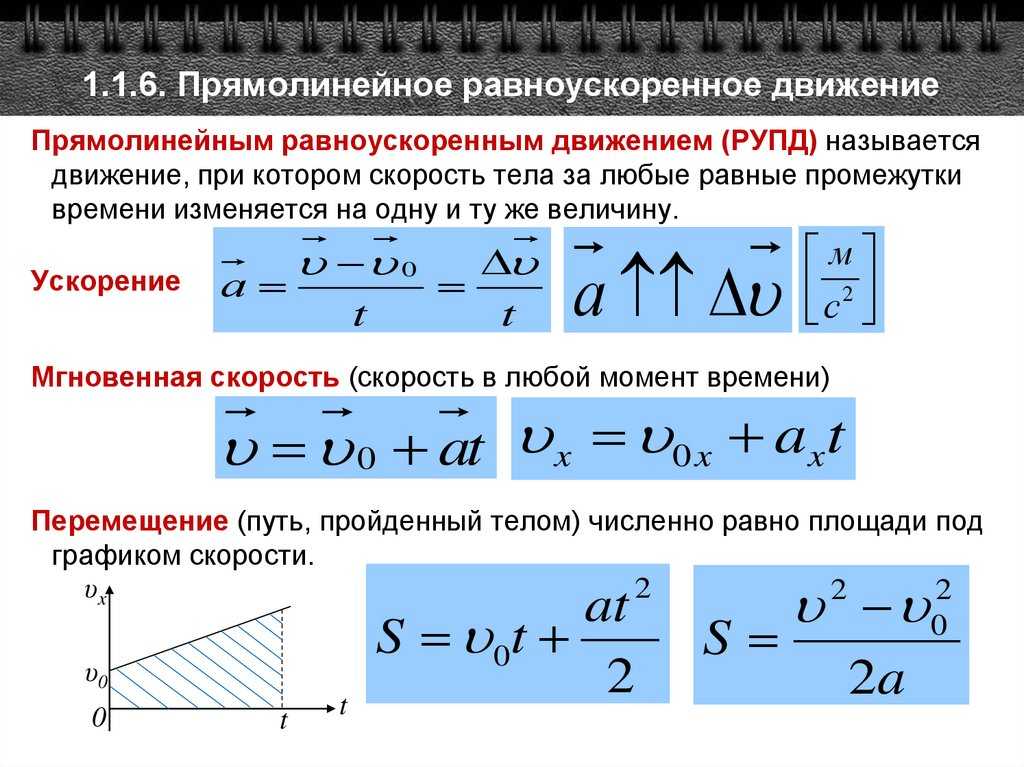
Цель работы: вычислить ускорение, с которым скатывается шарик по наклонному желобу. Для этого измеряют длину перемещения s шарика за известное время t. Так как при равноускоренном движении без начальной скорости
то, измерив s и t, можно найти ускорение шарика. Оно равно:
Никакие измерения не делаются абсолютно точно. Они всегда производятся с некоторой погрешностью, связанной с несовершенством средств измерения и другими причинами. Но и при наличии погрешностей имеется несколько способов проведения достоверных измерений. Наиболее простой из них — вычисление среднего арифметического из результатов нескольких независимых измерений одной и той же величины, если условия опыта не изменяются. Это и предлагается сделать в работе.
Это и предлагается сделать в работе.
Средства измерения: 1) измерительная лента; 2) метроном.
Материалы: 1) желоб; 2) шарик; 3) штатив с муфтами и лапкой; 4) металлический цилиндр.
Порядок выполнения работы
1. Укрепите желоб с помощью штатива в наклонном положении под небольшим углом к горизонту (рис. 175). У нижнего конца желоба положите в него металлический цилиндр.
2. Пустив шарик (одновременно с ударом метронома) с верхнего конца желоба, подсчитайте число ударов метронома до столкновения шарика с цилиндром. Опыт удобно проводить при 120 ударах метронома в минуту.
3. Меняя угол наклона желоба к горизонту и производя небольшие передвижения металлического цилиндра, добивайтесь того, чтобы между моментом пуска шарика и моментом его столкновения с цилиндром было 4 удара метронома (3 промежутка между ударами).
4. Вычислите время движения шарика.
5. С помощью измерительной ленты определите длину перемещения s шарика. Не меняя наклона желоба (условия опыта должны оставаться неизменными), повторите опыт пять раз, добиваясь снова совпадения четвертого удара метронома с ударом шарика о металлический цилиндр (цилиндр для этого можно немного передвигать).
6. По формуле
найдите среднее значение модуля перемещения, а затем рассчитайте среднее значение модуля ускорения:
7. Результаты измерений и вычислений занесите в таблицу:
|
Номер опыта |
s, м |
sср, м |
Число ударов метро нома |
t, с |
aср, м/с2 |
При прямолинейном равноускоренном движении без начальной скорости
где S — путь, пройденный телом, t — время прохождения пути. Средства измерения: измерительная лента (линейка), метроном (секундомер).
Лабораторная установка и порядок выполнения работы подробно описаны в учебнике.
| № опыта |
t, с |
S, м | |
|
1 |
6 |
0,5 |
0,028 |
|
2 |
5,5 |
0,5 |
0,033 |
|
3 |
5 |
0,49 |
0,039 |
|
4 |
5,5 |
0,49 |
0,032 |
|
5 |
6,5 |
0,51 |
0,024 |
|
среднее значение |
5,7 |
0,5 |
0,031 |
Вычисления:
Вычисление погрешностей
Точность приборов: Измерительная лента:
Секундомер:
Вычислим абсолютные погрешности:
Вычислим относительную погрешность:
Абсолютная погрешность косвенного измерения:
Найденное в результате работы ускорение можно записать так:
но при данной абсолютной погрешности последняя цифра в значении аср значения не имеет, поэтому запишем так:
Источник:
Решебник
по
физике
за 9 класс (И. К.Кикоин, А.К.Кикоин, 1999 год),
К.Кикоин, А.К.Кикоин, 1999 год),
задача №1
к главе «ЛАБОРАТОРНЫЕ РАБОТЫ».
Все задачи
← САМОЕ ВАЖНОЕ В ДЕВЯТОЙ ГЛАВЕ
Лабораторная работа № 2 «Измерение жесткости пружины» →
на возвышенности: насколько хорошо динамическое ускорение тела может определять скорость в изменчивой местности?
1. Натан Р., Гетц В.М., Ревилла Э., Холиоак М., Кадмон Р. и др. (2008) Парадигма экологии движения для объединения исследований движений организмов. Труды Национальной академии наук 105: 19052–19059. [Бесплатная статья PMC] [PubMed] [Google Scholar]
2. Brill RW, Block BA, Boggs CH, Bigelow KA, Freund EV, et al. (1999) Горизонтальные перемещения и распределение по глубине крупных взрослых желтоперых тунцов (Thunnus albacares) у Гавайских островов, зарегистрированные с помощью ультразвуковой телеметрии: последствия для физиологической экологии пелагических рыб. Морская биология 133: 395–408. [Google Scholar]
3. Броди А.Дж., Пелтон М.Р. (1989) Влияние дорог на передвижения черного медведя в западной части Северной Каролины. Бюллетень Общества дикой природы
17: 5–10. [Google Scholar]
Броди А.Дж., Пелтон М.Р. (1989) Влияние дорог на передвижения черного медведя в западной части Северной Каролины. Бюллетень Общества дикой природы
17: 5–10. [Google Scholar]
4. Браун В. С., Паркер В. С. (1976) Экология движения констриктора Coluber возле Коммунальной гибернакулы. Копейя 1976: 225–242. [Google Scholar]
5. Хестбек Дж. Б., Николс Дж. Д., Малецки Р. А. (1991) Оценки перемещений и верности участку с использованием данных о метках зимующих канадских гусей. Экология 72: 523–533. [Академия Google]
6. Поуп К.Л., Мэтьюз К.Р., Монтгомери В.Л. (2001) Экология движения и сезонное распределение горных желтоногих лягушек, Rana muscosa, в высокогорном бассейне Сьерра-Невада. Копейя 2001: 787–793. [Google Scholar]
7. Linnell JDC, Fiske P, Herfindal I, Odden J, Brøseth H, et al. (2007) Оценка структурированных исследований снежных следов для мониторинга популяций евразийской рыси Lynx lynx . Биология дикой природы 13: 456–466. [Google Scholar]
8. Bandeira de Melo LF, Lima Sábato MA, Vaz Magni EM, Young RJ, Coelho CM (2007) Тайная жизнь гривистых волков ( Chrysocyon brachyurus Illiger 1815): по данным GPS-ошейников. Журнал зоологии
271: 27–36. [Google Scholar]
Bandeira de Melo LF, Lima Sábato MA, Vaz Magni EM, Young RJ, Coelho CM (2007) Тайная жизнь гривистых волков ( Chrysocyon brachyurus Illiger 1815): по данным GPS-ошейников. Журнал зоологии
271: 27–36. [Google Scholar]
9. Блок Б.А., Дьюар Х., Блэквелл С.Б., Уильямс Т.Д., Принц Э.Д. и др. (2001) Миграционные перемещения, глубинные предпочтения и тепловая биология атлантического голубого тунца. Наука 293: 1310–1314. [PubMed] [Google Scholar]
10. Davis L, Boersma P, Court G (1996) Спутниковая телеметрия зимней миграции пингвинов Адели Pygoscelis adeliae . Полярная биология 16: 221–225. [Google Scholar]
11. Ропер Т.Дж., Остлер Дж.Р., Шмид Т.К., Кристиан С.Ф. (2001) Использование сеттов в меле европейского барсука. Поведение 138: 173–187. [Google Scholar]
12. Бэтчелор Т.А., Макмиллан Дж.Р. (1980)Система визуальной маркировки ночных животных. Журнал управления дикой природой 44: 497–499. [Google Scholar]
13.
Уолкотт Т.Г. (1977) Оптическое слежение и телеметрия для ночных полевых исследований. Журнал управления дикой природой
41: 309–312. [Google Scholar]
Журнал управления дикой природой
41: 309–312. [Google Scholar]
14. Хейвенс К.Дж., Шарп Э.Дж. (1998) Использование тепловизора при аэрофотосъемке животных. Бюллетень Общества дикой природы 26: 17–23. [Google Scholar]
15. Гарнер Д.Л., Андервуд Х.Б., Портер В.Ф. (1995) Использование современной инфракрасной термографии для изучения популяций диких животных. Экологического менеджмента 19: 233–238. [Google Scholar]
16. Buchler ER (1976) Хемилюминесцентная метка для отслеживания летучих мышей и других мелких ночных животных. Журнал маммологии 57: 173–176. [Академия Google]
17. Boonstra R, Craine ITM (1986) Расположение натальных гнезд и отслеживание мелких млекопитающих с помощью метода катушки и лески. Канадский журнал зоологии 64: 1034–1036. [Google Scholar]
18. Шанахан Д. Ф., Матье Р., Седдон П. Дж. (2007) Мелкомасштабное движение европейского ежа: приложение отслеживания катушки и нити. Новозеландский журнал экологии 31: 160–168. [Google Scholar]
19. Steinwald MC, Swanson BJ, Waser PM (2006)Влияние слежения за катушкой и леской на мелких пустынных млекопитающих. Юго-западный натуралист
51: 71–78. [Академия Google]
Steinwald MC, Swanson BJ, Waser PM (2006)Влияние слежения за катушкой и леской на мелких пустынных млекопитающих. Юго-западный натуралист
51: 71–78. [Академия Google]
20. Cooke SJ, Hinch SG, Wikelski M, Andrews RD, Kuchel LJ, et al. (2004) Биотелеметрия: механистический подход к экологии. Тенденции в экологии и эволюции 19: 334–343. [PubMed] [Google Scholar]
21. Wilson RP, Grémillet D, Syder J, Kierspel MAM, Garthe S, et al. (2002) Системы дистанционного зондирования и морские птицы: их использование, злоупотребление и потенциал для измерения переменных морской среды. Серия «Прогресс морской экологии» 228: 241–261. [Google Scholar]
22. Уилсон Р.П., Уилсон М.П. (1988) Счисление пути — новая методика определения перемещений пингвинов в море. Meeresforschung- Отчеты о морских исследованиях 32: 155–158. [Google Scholar]
23.
Браманти М., Даллантония Л., Папи Ф. (1988) Новая техника отслеживания траекторий полета птиц. Журнал экспериментальной биологии
134: 467–472. [Google Scholar]
[Google Scholar]
24. Джонсон MP, Tyack PL (2003) Цифровая акустическая записывающая метка для измерения реакции диких морских млекопитающих на звук. Журнал океанической инженерии IEEE 28: 3–12. [Академия Google]
25. Уилсон Р.П., Шепард Э.Л.К., Либш Н. (2008) Вникание в интимные подробности жизни животных: использование ежедневного дневника на животных. Исследования исчезающих видов 4: 123–137. [Google Scholar]
26. Наито Ю., Асага Т., Охяма Ю. (1990) Поведение пингвинов Адели при нырянии, определяемое регистратором времени и глубины. Кондор 92: 582–586. [Google Scholar]
27. Шепард Э.Л.К., Ламбертуччи С.А., Валлмитжана Д., Уилсон Р.П. (2011) Энергия помимо пищи: теория кормодобывания сообщает о времени, проведенном в термиках большой парящей птицей. PLoS ONE 6: doi:10.1371/journal.pone.0027375. [Бесплатная статья PMC] [PubMed]
28.
Митани Ю., Сато К., Ито С., Кэмерон М.Ф., Синифф Д.Б. и др. (2003) Метод реконструкции трехмерных профилей погружения морских млекопитающих с использованием данных геомагнитной напряженности: результаты двух лактирующих тюленей Уэдделла. Полярная биология
26: 311–317. [Google Scholar]
Полярная биология
26: 311–317. [Google Scholar]
29. Dussault C., Courtois R., Ouellette JR, Huot J. (1999) Оценка эффективности GPS-телеметрического ошейника для изучения среды обитания в бореальных лесах. Бюллетень Общества дикой природы 27: 965–972. [Google Scholar]
30. Брэдшоу CJA, Хинделл М.А., Самнер М.Д., Майкл К. (2004) Лояльность окупается: потенциальные последствия для истории жизни верности морским кормовым районам южных морских слонов. Поведение животных 68: 1349–1360. [Google Scholar]
31. Симс Д. В., Саутхолл Э. Дж., Тарлинг Г. А., Меткалф Дж. Д. (2005) Нормальная и обратная вертикальная миграция гигантской акулы, питающейся планктоном, для конкретной среды обитания. Журнал экологии животных 74: 755–761. [Google Scholar]
32. Bartumeus F, Catalan J, Viswanathan GM, Raposo EP, da Luz MGE (2008) Влияние углов поворота на успех неориентированных поисков животных. Журнал теоретической биологии 252: 43–55. [PubMed] [Google Scholar]
33. Бартумеус Ф., Левин С.А. (2008) Часы фрактальной переориентации: связь поведения животных со статистическими моделями поиска. Труды Национальной академии наук
105:19072–19077. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Бартумеус Ф., Левин С.А. (2008) Часы фрактальной переориентации: связь поведения животных со статистическими моделями поиска. Труды Национальной академии наук
105:19072–19077. [Бесплатная статья PMC] [PubMed] [Google Scholar]
34. Бенхаму С. (2004) Как надежно оценить извилистость пути животного: прямолинейность, извилистость или фрактальная размерность. Журнал теоретической биологии 229: 209–220. [PubMed] [Google Scholar]
35. Бенхаму С. (2006) Обнаружение компонента ориентации в путях животных, когда предпочтительное направление зависит от человека. Экология 87: 518–528. [PubMed] [Google Scholar]
36. Hays GC, Akesson S, Godley BJ, Luschi P, Santidrian P (2001) Последствия точности определения местоположения для интерпретации данных спутникового слежения. Поведение животных 61: 1035–1040. [Академия Google]
37. Холзи Л.Г., Уайт К.Р. Сравнительная энергетика передвижения млекопитающих: Люди не отличаются, Журнал эволюции человека (2012). Доступно: http://dx. doi.org/10.1016/j.jhevol.2012.07.008. [PubMed]
doi.org/10.1016/j.jhevol.2012.07.008. [PubMed]
38. Крамер Д.Л., Маклафлин Р.Л. (2001) Поведенческая экология прерывистой локомоции. Американский зоолог 41: 137–153. [Google Scholar]
39. Уэр К., Фридлендер А.С., Новачек Д.П. (2011) Кормление горбатых китов мелкими и глубокими выпадами во фьордах западной части Антарктического полуострова. Наука о морских млекопитающих 27: 587–605. [Академия Google]
40. Wilson RP, Liebsch N, Davies IM, Quintana F, Weimerskirch H, et al. (2007) Все в море со следами животных; методические и аналитические решения по разрешению движения. Глубоководные исследования, часть II 54: 193–210. [Google Scholar]
41. Йода К., Найто Ю., Сато К., Такахаши А., Нисикава Дж. и др. (2001) Новый метод наблюдения за поведением свободноживущих пингвинов Адели. Журнал экспериментальной биологии 204: 685–690. [PubMed] [Google Scholar]
42.
Йода К., Сато К., Ниидзума Ю., Курита М., Бост К.А. и др. (1999) Точный мониторинг морского поведения пингвинов Адели, определяемый с помощью регистраторов данных об ускорении. Журнал экспериментальной биологии
202: 3121–3126. [PubMed] [Google Scholar]
Журнал экспериментальной биологии
202: 3121–3126. [PubMed] [Google Scholar]
43. Сато К., Митани Ю., Кэмерон М.Ф., Синифф Д.Б., Найто Ю. (2003) Факторы, влияющие на характер поглаживания и угол наклона тела у ныряющих тюленей Уэдделла в естественных условиях. Журнал экспериментальной биологии 206: 1461–1470. [PubMed] [Google Scholar]
44. Ropert-Coudert Y, Grémillet D, Kato A (2006) Скорость плавания больших бакланов на свободе. Морская биология 149: 415–422. [Google Scholar]
45. Эккерт С.А. (2002)Скорость плавания и модели движения беременных кожистых морских черепах ( Dermochelys coriacea ) на острове Санта-Крус, Виргинские острова США. Журнал экспериментальной биологии 205: 3689–3697. [PubMed] [Google Scholar]
46. Хассрик Дж.Л., Крокер Д.Е., Зено Р.Л., Блэквелл С.Б., Коста Д.П. и др. (2007) Скорость плавания и стратегии кормления северных морских слонов. Глубоководные исследования, часть II 54: 369–383. [Google Scholar]
47.
Ponganis PJ, Ponganis EP, Ponganis KV, Kooyman GL, Gentry RL, et al. (1990) Скорость плавания у отариевых. Канадский журнал зоологии
68: 2105–2112. [Google Scholar]
(1990) Скорость плавания у отариевых. Канадский журнал зоологии
68: 2105–2112. [Google Scholar]
48. Уилсон Р.П., Пютц К., Бост К.А., Кулик Б.М., Баннаш Р. и соавт. (1993) Глубина погружения пингвинов в зависимости от вертикальной миграции добычи: чей обед при свечах? Серия «Прогресс морской экологии» 94: 101–104. [Google Scholar]
49. Шепард Э.Л.К., Уилсон Р.П., Либш Н., Кинтана Ф., Лайх А.Г. и др. (2008) Гибкое весло проливает новый свет на скорость: новый метод дистанционного измерения скорости плавания у водных животных. Исследования исчезающих видов 4: 157–164. [Академия Google]
50. Bidder OR, Soresina M, Shepard ELC, Halsey LG, Quintana F, et al. (2012) Потребность в скорости: тестирование общего динамического ускорения тела для определения скорости перемещения животных при наземном исчислении пути. Зоология 115: 58–64. [PubMed] [Google Scholar]
51.
Ватанабэ Ю., Идзава М., Като А., Роперт-Кудерт Ю., Найто Ю. (2005) Новый метод детального наблюдения за поведением наземных животных: тематическое исследование с домашней кошкой. Прикладная наука о поведении животных
94: 117–131. [Академия Google]
Прикладная наука о поведении животных
94: 117–131. [Академия Google]
52. Цуда Ю., Кавабе Р., Танака Х., Мицунга Ю., Хираоши Т. и др. (2006) Мониторинг нерестового поведения кеты с помощью регистратора данных ускорения. Экология пресноводных рыб 15: 264–274. [Google Scholar]
53. Шепард Э.Л.К., Уилсон Р.П., Кинтана Ф., Лайх А.Г., Либш Н. и др. (2008) Идентификация моделей движения животных с помощью трехосной акселерометрии. Исследования исчезающих видов 10: 47–60. [Google Scholar]
54. Kato A, Ropert-Coudert Y, Grémillet D, Cannell B (2006) Стратегия передвижения и кормления у мелководных морских птиц, движущихся ногами и крыльями. Серия «Прогресс морской экологии» 308: 293–301. [Google Scholar]
55. Dellcielos AC, Vieira MV (2007)Длина шага и частота древесной ходьбы у семи видов сумчатых дидельфид. Acta Theriologica 52: 101–111. [Google Scholar]
56.
Grieve DW, Gear RJ (1966) Взаимосвязь между длиной шага, частотой шагов, временем плавания и скоростью ходьбы у детей и взрослых. Эргономика
9: 379–399. [PubMed] [Google Scholar]
Эргономика
9: 379–399. [PubMed] [Google Scholar]
57. Heglund NC, Taylor CR, McMahon CR (1974) Масштабирование частоты шагов и походки в зависимости от размера животного: от мышей до лошадей. Наука 186: 1112–1113. [PubMed] [Академия Google]
58. Gleiss AC, Gruber SH, Wilson RP, editors (2009) Многоканальная регистрация данных: на пути к определению поведения и скорости обмена веществ у свободно плавающих акул. Дордрехт: Спрингер.
59. Фарли К.Т., Глашин Дж., МакМахон Т.А. (1993) Бегущие пружины: скорость и размер животного. Журнал экспериментальной биологии 185: 71–86. [PubMed] [Google Scholar]
60. Wilson RP, White CR, Quintana F, Halsey LG, Liebsch N, et al. (2006) Движение к ускорению оценок скорости метаболизма у свободноживущих животных: случай баклана. Журнал экологии животных 75: 1081–1090. [PubMed] [Google Scholar]
61.
Halsey LG, Shepard ELC, Hulston CJ, Venables MC, White CR и др. (2008) Ускорение в зависимости от частоты сердечных сокращений для оценки расхода энергии и скорости во время передвижения у животных: тесты с легкими модельными видами, Homo sapiens .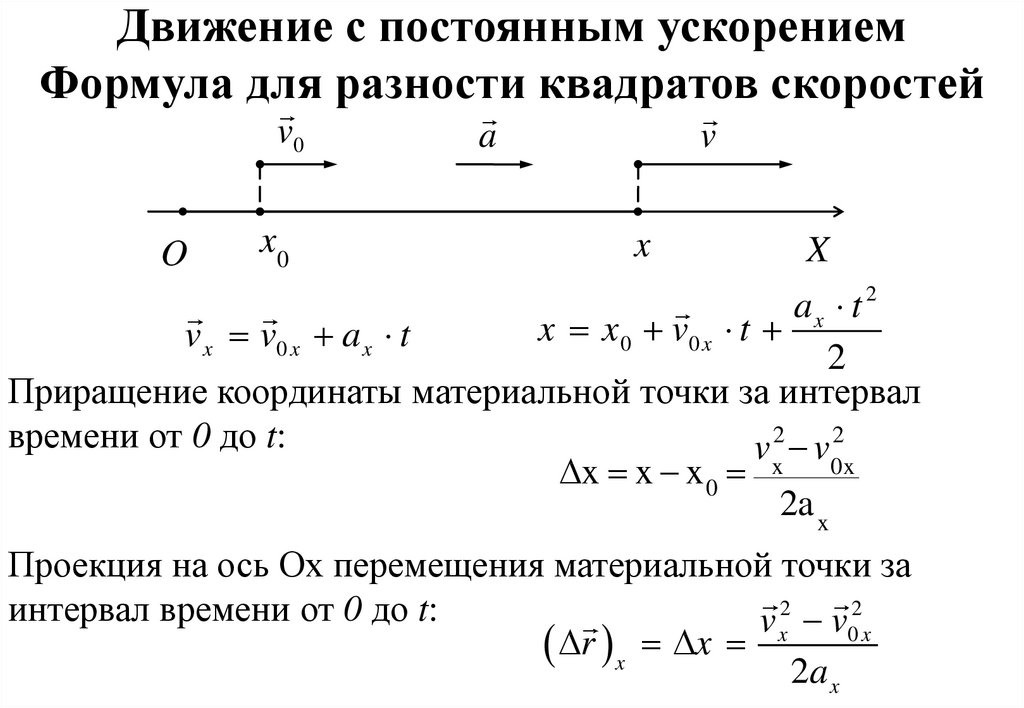 Зоология
111: 231–241. [PubMed] [Google Scholar]
Зоология
111: 231–241. [PubMed] [Google Scholar]
62. Qasem L, Cardew A, Wilson A, Griffiths I, Halsey LG, et al.. (2012) Трехосное динамическое ускорение как показатель расхода энергии животными; мы должны суммировать значения или вычислять вектор? ПЛОС ОДИН e31187. doi:10.1371/journal.pone.0031187. [Бесплатная статья PMC] [PubMed]
63. Ди Орио А.П., Каллас Р., Шефер Р.Дж. (2003) Эффективность двух ошейников с GPS-телеметрией в разных условиях среды обитания. Бюллетень Общества дикой природы 31: 372–379. [Google Scholar]
64. Bouten C, Sauren A, Verduin M, Janssen J (1997) Влияние размещения и ориентации акселерометров, закрепленных на теле, на оценку расхода энергии во время ходьбы. Медицинская и биологическая инженерия и вычислительная техника 35: 50–56. [PubMed] [Google Scholar]
65.
Campbell KL, Crocker PRE, Mckenzie DC (2002) Полевая оценка расхода энергии у женщин с использованием акселерометров Tritrac. Медицина и наука в спорте и упражнениях
34: 1667–1674.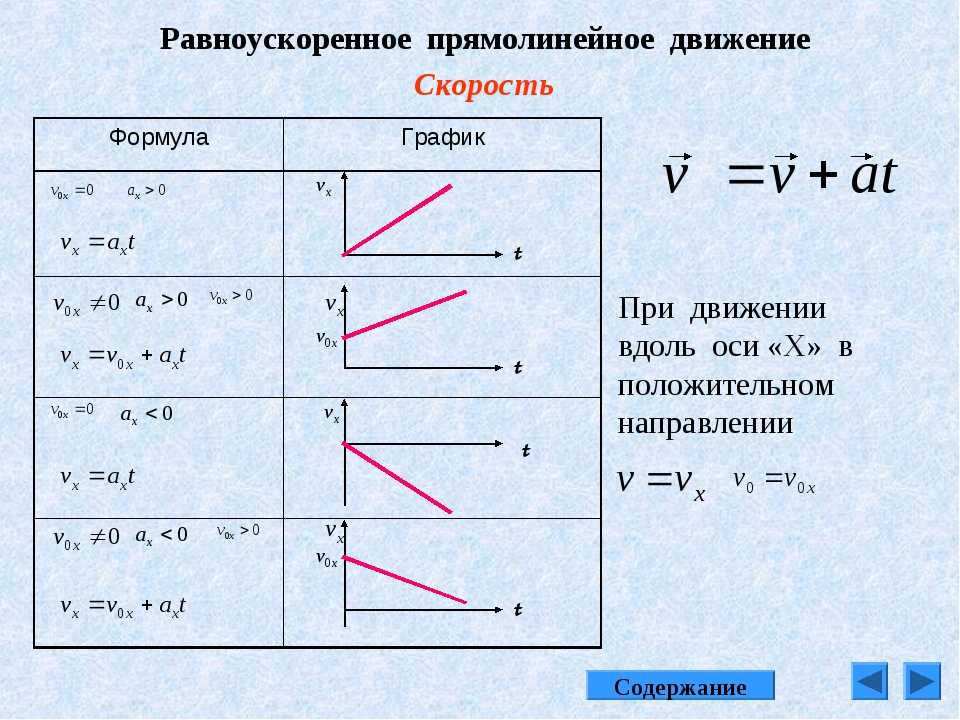 [PubMed] [Академия Google]
[PubMed] [Академия Google]
66. Bouten CV, Westerterp KR, Verduin M, Janssen JD (1994) Оценка расхода энергии на физическую активность с использованием трехосного акселерометра. Медицина и наука в спорте и упражнениях 26: 1516–1523. [PubMed] [Google Scholar]
67. Шепард Э.Л.К., Уилсон Р.П., Альбареда Д., Глесис А., Лайх А.Г. и др. (2008) Идентификация моделей движения животных с помощью трехосной акселерометрии. Endang Species Res 10: 47–60. [Google Scholar]
68. Глейсс А.С., Уилсон Р.П., Шепард Э.Л.К. (2011) Обеспечение работы общего динамического ускорения тела: теория ускорения как показатель расхода энергии. Методы экологии и эволюции 2: 23–33. [Академия Google]
69. Лежен Т.М., Виллемс П.А., Хеглунд Н.К. (1998) Механика и энергетика передвижения человека по песку. Журнал экспериментальной биологии 201: 2071–2080. [PubMed] [Google Scholar]
70.
Кердок А.Е., Бивенер А.А., МакМахон Т.А., Вейанд П.Г., Герр Х.М. (2002) Энергетика и механика бега человека по поверхностям различной жесткости. Журнал прикладной физиологии
92: 469–478. [PubMed] [Google Scholar]
Журнал прикладной физиологии
92: 469–478. [PubMed] [Google Scholar]
71. Пандольф К.Б., Хейсман М.Ф., Гольдман Р.Ф. (1976) Затраты метаболической энергии и коэффициенты рельефа при ходьбе по снегу. Эргономика 19: 683–690. [PubMed] [Google Scholar]
72. Кнапик Дж. Дж., Рейнольдс К. Л., Харман Э. (2004) Солдатская повозка: исторические, физиологические, биомеханические и медицинские аспекты. Военная медицина 169: 45–56. [PubMed] [Google Scholar]
73. Сан Дж., Уолтерс М., Свенссон Н., Ллойд Д. (1996) Влияние уклона поверхности на характеристики походки человека: исследование городских пешеходов, идущих по наклонной поверхности. Эргономика 39: 677–692. [PubMed] [Google Scholar]
74. Хэлси Л.Г., Шепард Э.Л.К., Кинтана Ф., Лайч А.Г., Грин Дж.А. и др. (2009 г.) Взаимосвязь между потреблением кислорода и ускорением тела у ряда видов. Сравнительная биохимия и физиология Молекулярная и интегративная физиология 152: 197–202. [PubMed] [Google Scholar]
75.
Шепард Э. Л.К., Уилсон Р.П., Кинтана Ф., Гомес Лайх А., Форман Д.В. (2009) Стремление к экономии времени или топлива: мелкомасштабные энергетические балансы проливают свет на валюты в ныряющей птице. Труды Королевского общества B: биологические науки
276: 3149–3155. [Бесплатная статья PMC] [PubMed] [Google Scholar]
Л.К., Уилсон Р.П., Кинтана Ф., Гомес Лайх А., Форман Д.В. (2009) Стремление к экономии времени или топлива: мелкомасштабные энергетические балансы проливают свет на валюты в ныряющей птице. Труды Королевского общества B: биологические науки
276: 3149–3155. [Бесплатная статья PMC] [PubMed] [Google Scholar]
76. Halsey LG, White CR (2010) Измерение энергии и поведения с помощью акселерометрии у тростниковых жаб Bufo marinus . ПЛОС ОДИН 5: е10170. [Бесплатная статья PMC] [PubMed] [Google Scholar]
77. Osborne PE, Alonso JC, Bryant RG (2001) Моделирование использования среды обитания в ландшафтном масштабе с использованием ГИС и дистанционного зондирования: тематическое исследование с дрофами. Журнал прикладной экологии 38: 458–471. [Google Scholar]
78.
Herren R, Sparti A, Aminian K, Schutz Y (1999) Прогнозирование скорости и наклона при беге на открытом воздухе у людей с использованием акселерометрии. Медицина и наука в спорте и упражнениях
31: 1053–1059. [PubMed] [Google Scholar]
[PubMed] [Google Scholar]
Как измерить расход энергии у диких птиц: сравнение частоты сердечных сокращений, методов ускорения и бюджета времени – Функциональная экология: резюме на простом языке
физиологическая экология животных
Дж. Морган Браун, Виллем Бутен , Kees C. J. Camphuysen, Bart A. Nolet, Judy Shamoun-Baranes
Это краткое изложение научной статьи по функциональной экологии, опубликованное здесь.
Животные должны упорно трудиться, чтобы получать пищу для получения энергии, а это означает, что они должны по возможности ограничивать потребление энергии. Это делает энергию полезным показателем для экологов, который может измерять эффективность различных видов поведения животных. Это может быть интересно в разных временных масштабах, от мгновенной адаптации до того, как животные перемещаются по ландшафту, до того, как они разделяют разные виды деятельности в зависимости от времени года.
Частота сердечных сокращений — это традиционный метод, используемый для измерения расхода энергии как с высоким разрешением, так и в течение длительных периодов времени, но безопасное крепление регистраторов сердечного ритма требует инвазивных хирургических вмешательств. Динамическое ускорение тела — это более современный метод измерения расхода энергии, который работает путем сложения изменений в движении, которое совершает животное. Однако у нас пока нет хорошего понимания того, насколько хорошо динамическое ускорение тела преобразуется в расход энергии при различных типах движения (машущий полет, парение, ходьба, стоянка и плавание) в коротких и длинных временных масштабах.
Динамическое ускорение тела — это более современный метод измерения расхода энергии, который работает путем сложения изменений в движении, которое совершает животное. Однако у нас пока нет хорошего понимания того, насколько хорошо динамическое ускорение тела преобразуется в расход энергии при различных типах движения (машущий полет, парение, ходьба, стоянка и плавание) в коротких и длинных временных масштабах.
В этом исследовании мы измеряем динамическое ускорение тела вместе с частотой сердечных сокращений у диких малых черноспинных чаек. Наша цель состояла в том, чтобы изучить, показывает ли динамическое ускорение тела такие же изменения, как частота сердечных сокращений, как внутри, так и между различными типами движений. Мы также стремимся определить, как лучше всего использовать акселерометры для оценки ежедневных затрат энергии, будь то преобразование ускорения непосредственно в затраты энергии или использование его для определения времени, затрачиваемого на различные режимы поведения, и предоставления ранее определенных затрат энергии для этой деятельности (называемой энерго-временной бюджет).