Радарные датчики | SICK
Радарные датчики | SICKРазработаны для максимальной эксплуатационной готовности
Радарные датчики при любой погоде надежно обнаруживают любой объект в пределах своей диаграммы направленности луча. Поэтому они идеально подходят в качестве помощи водителям и для предотвращения столкновения.
Filter
Фильтровать по:
2 результатов:
Результаты 1 — 2 из 2
Вид: Галерея Список- Опциональная и простая настройка дальности сканирования до 20 м
- Не воспримчив к условиям плохой погоды и загрязнениям
- Простой монтаж и легкая настройка
- Дополнительные модули передачи-приема
Надёжное обнаружение объектов в самых сложных погодных условиях
- Радарная технология для максимально эффективного использования на улице
- Прочный алюминиевый корпус без подвижных деталей
- Регулируемый горизонтальный апертурный угол
- Большой рабочий диапазон для разных случаев применения
- Настройка параметров через веб-браузер
- Возможна очистка под высоким давлением
- Ультрасовременная радарная технология FMCW
- Цифровые входы/выходы и дополнительные интерфейсы передачи данных
Результаты 1 — 2 из 2
Пожалуйста, подождите. ..
..
Ваш запрос обрабатывается, это может занять несколько секунд.
Промышленные радарные датчики СВЧ излучения. Антенны: рупорная и параболическая
Рассматриваемые здесь особенности относятся к промышленным радарам или радарным уровнемерам, использующим частоты сверхвысокочастотного (СВЧ) диапазона 10, 24, 45, 75 ГГц и частотную модуляцию (ЧМ) непрерывных волн.
Промышленные радарные дальномеры СВЧ-ЧМ малой мощности отличаются сравнительно небольшой дальностью обнаружения, тем не менее, вполне покрывающей потребности многих задач обнаружения, определения расстояния до объекта и измерения уровня. Формирование выходных сигналов, пропорциональных измеренному расстоянию в радарах СВЧ-ЧМ, производится на основании аппаратного спектрального анализа смеси несущей, переданной и отраженной волн по алгоритму быстрого преобразования Фурье (ППФ). Точность варьируется в пределах от 1 до 5 см, в зависимости от частоты и диапазона дальномера.
Максимальный диапазон в каждой модельной серии радарных дальномеров может быть достигнут благодаря применению антенны, которая направляет и усиливает электромагнитные волны.
Существует два типа СВЧ антенн:
- Рупорная антенна;
- Параболическая антенна.
Выбор того или иного типа зависит от задачи обнаружения, контроля, измерения.
Рупорная антенна
Рупорная антенна – несложное устройство, это попросту расширяющийся волновод (Рис. 3), который может усиливать и направлять СВЧ излучение.
Обычный параллельный волновод сам по себе является неэффективным излучателем, – на выходе происходит обрыв изменения импеданса от импеданса волны до импеданса окружающего пространства. Когда радиоволны, идущие по волноводу, сталкиваются с открытым выходом, значительная часть энергии радиоволн отражается назад, в сторону источника, из-за чего часть мощности излучения гасится. Отраженные волны образуют в волноводе стоячие волны, повышая их коэффициент, что ведет к потере энергии и, возможно, нагреву передатчика. Кроме этого, из-за малого раскрытия волновода (менее одной длины волны), имеет место значительная дифракция, в следствии чего получаем широко распространенное, но не направленное излучение.
Когда радиоволны, идущие по волноводу, сталкиваются с открытым выходом, значительная часть энергии радиоволн отражается назад, в сторону источника, из-за чего часть мощности излучения гасится. Отраженные волны образуют в волноводе стоячие волны, повышая их коэффициент, что ведет к потере энергии и, возможно, нагреву передатчика. Кроме этого, из-за малого раскрытия волновода (менее одной длины волны), имеет место значительная дифракция, в следствии чего получаем широко распространенное, но не направленное излучение.
Путем расширения волновода в форме раструба удается в большой степени улучшить его характеристики, добиться усиления и направленности излучения. Продолжением круглых волноводов, используемых промышленными дальномерами, является конусообразный рупор.
Рисунок 3. Дальномер WADECO с круглым волноводом и конусообразной рупорной антенной.
Усиление зависит от важных геометрических параметров антенны:
- Длина рупора;
- Площадь раскрытия;
- Угол расширения.

Длина рупора выбирается в пределах от 2 до 5 длин рабочей волны. Площадь раскрыва — это площадь выходного зева раструба, чем она больше, тем выше усиление и лучше направленность излучения.
Усиление рупорной антенны определяется площадью её раскрыва и может быть рассчитано по формуле:
где:
λ – длина волны,
S — площадь раскрыва рупора,
v — КИП (коэффициент использования поверхности рупора), равный 0,6 для случая, когда разность хода центрального и перифирийного лучей менее, но близка к π/2, и 0,8 при применении выравнивающих фазу волны устройств.
Параболическая антенна
Параболическая антенна, иначе называемая «параболическим отражателем» является наиболее распространенной среди всех СВЧ антенн. Данный тип антенны происходит из оптики, что вполне объяснимо, т.к микроволны находятся в переходной области между обычными радиоволнами и видимым инфракрасным излучением. Параболический отражатель, как таковой, не является излучателем. Он отражает волны, посылаемые в его направление так называемым облучателем, расположенном на определенном фокусном расстоянии. Благодаря форме параболы, отраженные волны сходятся в параллельный луч, что обеспечивает их узкую направленность. Чем больше отражатель по отношению к длине волны, тем уже луч. Параболические антенны, среди прочих, отличаются наилучшим усилением и наибольшим коэффициентом направленности.
Параболический отражатель, как таковой, не является излучателем. Он отражает волны, посылаемые в его направление так называемым облучателем, расположенном на определенном фокусном расстоянии. Благодаря форме параболы, отраженные волны сходятся в параллельный луч, что обеспечивает их узкую направленность. Чем больше отражатель по отношению к длине волны, тем уже луч. Параболические антенны, среди прочих, отличаются наилучшим усилением и наибольшим коэффициентом направленности.
Рисунок 4. Дальномер WADECO с круглым волноводом и параболической антенной.
Усиление параболической антенны может быть рассчитано по формуле:
где:
A – площадь раскрыва антенны, которым является зев параболического рефлектора,
d – диаметр параболического рефлектора,
λ – длина волны,
eA — отвлеченный параметр между 0 и 1, именуемый «эффективностью раскрыва». Типовая эффективность раскрыва для параболических антенн находится в пределах от 0,55 до 0,70.
Типовая эффективность раскрыва для параболических антенн находится в пределах от 0,55 до 0,70.
Можно видеть, что чем больше площадь раскрытия, сопоставимая с длиной волны, тем выше усиление.
Диаграмма направленности антенн
Рисунок 5. Типовая диаграмма направленности антенны (ДНА).
Антенны предназначены для формирования направленности и посыла максимальной мощности в направлении распространения СВЧ излучения. Сфокусировать всю энергию в одном направлении практически невозможно, часть ее растекается в стороны и порождает так называемые боковые лепестки направленности относительно главного лепестка, расположенного в центре диаграммы. Боковые лепестки имеют меньшую амплитуду. Целью направленной антенны является повышение мощности главного лепестка за счет снижения мощности боковых лепестков направленности.
Ширина луча, характеризующая антенну, определяется шириной главного лепестка ДНА по уровню половинной мощности (что на 2 дБ ниже максимального усиления вдоль главной оси ДНА).
Ширина луча антенны обычно сужается при увеличении размеров рефлектора. Ширина луча, как правило, выражается через угол расхождения.
Диаграмма направленности рупорной антенны характеризуется более широким углом расхождения и меньшим усилением по сравнению с параболической антенной, поэтому рупорные антенны применяются там, где требуется распространить СВЧ излучение на большую площадь, а параболические антенны применяются там, где требуется направленность «точка в точку» на большем расстоянии.
Рисунок 6. Модель параболической антенны и ДНА, выполненные в программе-симуляторе
Рисунок 7. Модель рупорной антенны и ДНА, выполненные в программе-симуляторе
Область применения
СВЧ технологии используются для бесконтактного обнаружения и контроля положения объектов, измерения расстояния и уровня в очень тяжелых условиях эксплуатации, связанных с высокой температурой, образованием дыма, пара, распространением пыли и грязи.
Принципы обнаружения и измерения СВЧ устройств основываются на отражении радиоволн, обусловленном резким изменением макроскопических параметров среды, характеризующих распространение радиоволн: диэлектрической и магнитной проницаемости. Упомянутые выше условия, ухудшающие оптические свойства среды и препятствующие распространению светового излучения, не влияют на распространение радиоволн. В основном же радиоволны и оптические волны подчиняются одним законам. При столкновении радиоволн с гладкой поверхностью имеет место «зеркальное» отражение, которое описывается формулами Френеля, при столкновении с шероховатой поверхностью происходит диффузное отражение.
Микроволновые дальномеры для промышленной автоматизации производят обнаружение и измерения на основании спектрального анализа смеси несущей, переданной и отраженной волн по алгоритму быстрого преобразования Фурье (ППФ).Способность обнаружения и измерения, не зависящая от оптических и механических свойств среды обусловливает применимость радиоволновых технологий в таких отраслях, как металлургия, горно-обогатительная промышленность, химическая промышленность, производство строительных материалов и т. п. В металлургии СВЧ дальномеры используются для измерения уровня шихты в доменной печи, измерения уровня чугуна в чугуновозах, измерения уровня загрузки угля в коксовую печь, измерения толщины огнеупоров, контроля положения горячих слябов, контроля уровня сырья в перегрузочных течках конвейеров и др.
п. В металлургии СВЧ дальномеры используются для измерения уровня шихты в доменной печи, измерения уровня чугуна в чугуновозах, измерения уровня загрузки угля в коксовую печь, измерения толщины огнеупоров, контроля положения горячих слябов, контроля уровня сырья в перегрузочных течках конвейеров и др.
Выбор антенны рупорного или параболического типа основывается на сопоставлении ДНА с параметрами задачи (такими как дальность, размеры пространства, измеряемая поверхность), требованиями по монтажу с учетом температуры измеряемой среды.
Рисунок 8 иллюстрирует пример применения дальномера с рупорной антенной на доменной печи. Данный выбор объясняется конструктивной простотой самого рупора и неприхотливостью, учитывая то, что антенна размещается внутри доменной печи, а также большим пятном проекции СВЧ излучения на измеряемую поверхность, позволяющим, при неравномерности поверхности получить информацию о максимальном уровне. Благодаря волноводу, измерительный прибор может быть отнесен от зоны с высокой температурой, в котором располагается антенна.
Нередко выбор рупорной антенны связан с ее целостностью и надежностью, когда существует угроза механических повреждений сыплющимися материалами.
Рисунок 8. Измерение уровня шихты в доменной печи с помощью дальномера с рупорной антенной.
На рисунке 9 приведен пример применения дальномера для измерения уровня чугуна в чугуновозе миксерного типа. В этом случае используется параболическая антенна, которая формирует узкий и направленный луч. Процесс подразумевает расположение уровнемера снаружи емкости, тогда требуется узкий луч, проходящий через горловину емкости.
Длинный волновод позволяет отнести измерительный прибор от антенны на безопасное расстояние.
Благодаря лучшей направленности и усилению параболическая антенна пользуется предпочтением, если процесс допускает наружное измерение и нет угрозы механических повреждений.
Рисунок 9.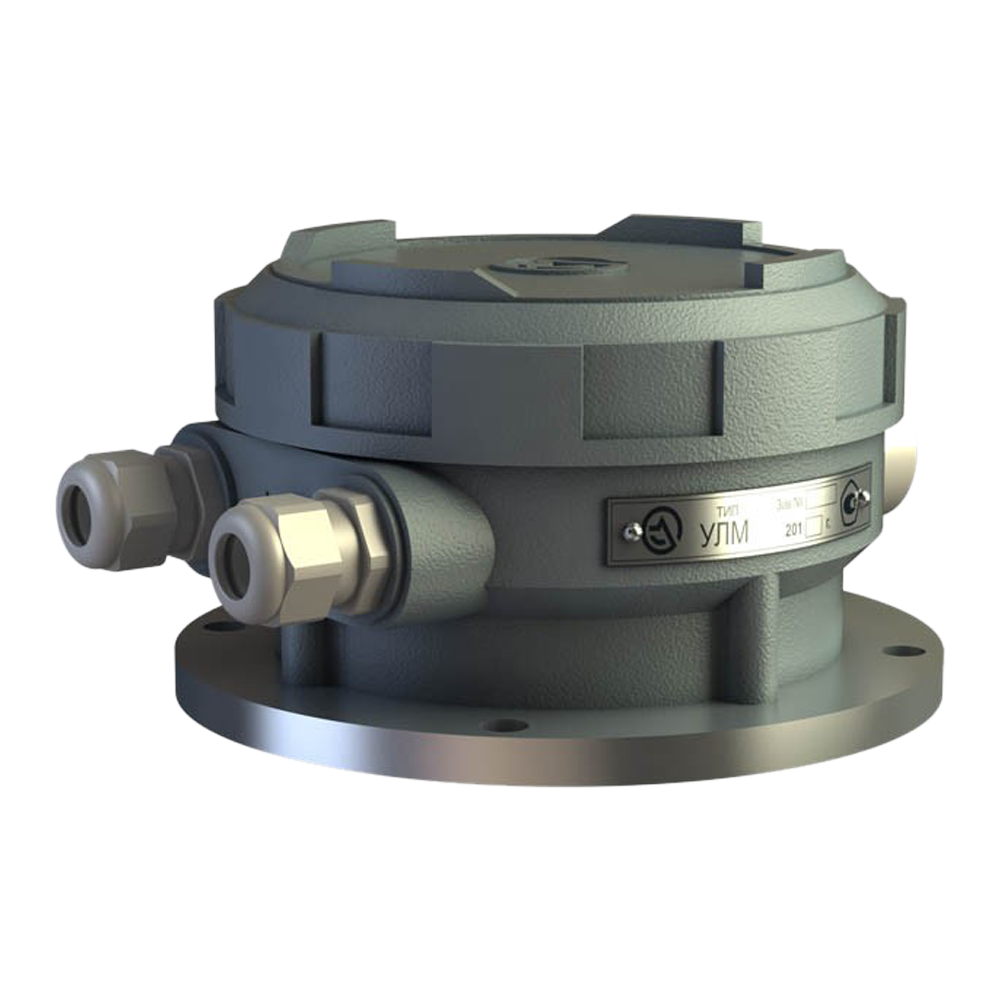 Измерение уровня чугуна в чугуновозе миксерного типа с помощью дальномера с параболической антенной.
Измерение уровня чугуна в чугуновозе миксерного типа с помощью дальномера с параболической антенной.
Радиолокационный датчик для обнаружения транспорта
Понимание того, как работает радиолокационный датчик, может стать ключом к пониманию его силы в обнаружении транспорта и его превосходства над конкурентными технологиями.
Если Вы хотите понять, как работает радар, хорошим началом может стать наблюдение за криком мальчика в туннеле.
В моем городе есть детская площадка, куда я люблю водить своего четырехлетнего сына. Чтобы попасть на детскую площадку, нужно пройти немного вдоль ручья, а затем через длинный туннель, который проходит под шоссе. Мой сын любит этот туннель. Каждый раз, когда мы проходим через него, он издает серию коротких, звонких криков, которые эхом возвращаются к нему через мгновение. Эхо всегда вызывает у него смех, который, так же, возвращается к нему, что заставляет его смеяться еще больше. Иногда он экспериментирует с различными звуками, изменяя высоту и длину своих криков, чтобы услышать, как реагирует эхо.
Урок, который он должен усвоить, играя с эхом: звук отражается. Это потому, что звук, подобно электромагнетизму, представляет собой серию волн и отраженных от объектов волн.
Этот простой факт произвел революцию почти во всех аспектах жизни на Земле. Потому что мы, понимая как работают электромагнитные волны, использовали радиоволны для связи и Wi-Fi; видимый свет для освещения наших домов и просмотра фильмов; инфракрасные волны для управления нашими телевизорами; гамма-лучи для борьбы с раком; микроволны для того, чтобы, помимо всего прочего, преобразовать нашу транспортную инфраструктуру.
Использование микроволн позволяет радару видеть транспортные средства, которые в противном случае не были бы видны из-за плохого освещения, погодных условий, пыли и других препятствий, не дающих видимым световым волнам проникнуть внутрь. Понимание электромагнитного спектра закладывает основу для понимания того, как радарные датчики используется в транспортной отрасли, а также причин, по которым для систем обнаружения дорожных происшествий требуется усовершенствованный тип радара, чтобы преодолеть проблемы, присущие этой технологии.
Bosch на страже безопасного перестроения :: carway.info
Радарные датчики Bosch для заднего бампера запущены в серийное производство. Мертвые зоны» представляют постоянную угрозу ДТП при перестроении. Ведущий европейский производитель запускает в серийное производство радарные датчики средней дальности для заднего бампера (MRR). В основе технологии MRR лежат разработки Bosch для радаров 4-го поколения.
Перед тем как перестроиться в другую полосу, водитель автомобиля традиционно «осматривается» по сторонам и оценивает обстановку на дороге. Но даже для тех, кто это старательно делает всегда, существует серьезный вызов – так называемая «мертвая зона», которая таит в себе большую опасность и часто способна спровоцировать серьезное ДТП. Эту зону невозможно просмотреть через зеркала заднего вида, но размеры ее достаточны для того, чтобы «скрыть» от зоркого глаза водителя даже мини-грузовик.
Для снижения этих рисков компанией Bosch и была разработана система помощи при перестроении. Радарный сенсор средней дальности, расположенный на заднем бампере, анализирует дорожную ситуацию позади и по сторонам автомобиля. «Радары на заднем бампере внимательно и беспрерывно фиксируют все, что происходит у вас за спиной. Система всегда точно распознает другие транспортные средства в «слепой зоне» автомобиля», – говорит Герхард Штейгер, президент подразделения Bosch Chassis Systems Control.
Радарный сенсор средней дальности, расположенный на заднем бампере, анализирует дорожную ситуацию позади и по сторонам автомобиля. «Радары на заднем бампере внимательно и беспрерывно фиксируют все, что происходит у вас за спиной. Система всегда точно распознает другие транспортные средства в «слепой зоне» автомобиля», – говорит Герхард Штейгер, президент подразделения Bosch Chassis Systems Control.
Сенсоры мониторят дорожную обстановку
Сегодня компания Bosch, мировой лидер в производстве комплектующих и электронных систем для автомобилей, запускает систему помощи при перестроении в серийное производство. Для повышения уровня безопасности пассажиров при перестроении европейский автопроизводитель встроил в задний бампер два сенсора – один слева и один справа. MRR-сенсоры мониторят дорожную ситуацию на соседних полосах движения и позади автомобиля.
Мощное программное обеспечение собирает информацию с сенсоров и моделирует трафик на дороге. В боковое зеркало заднего вида подается световой сигнал, предупреждающий водителя о стремительно приближающемся сзади автомобиле, или о наличии другого транспортного средства в «мертвой зоне».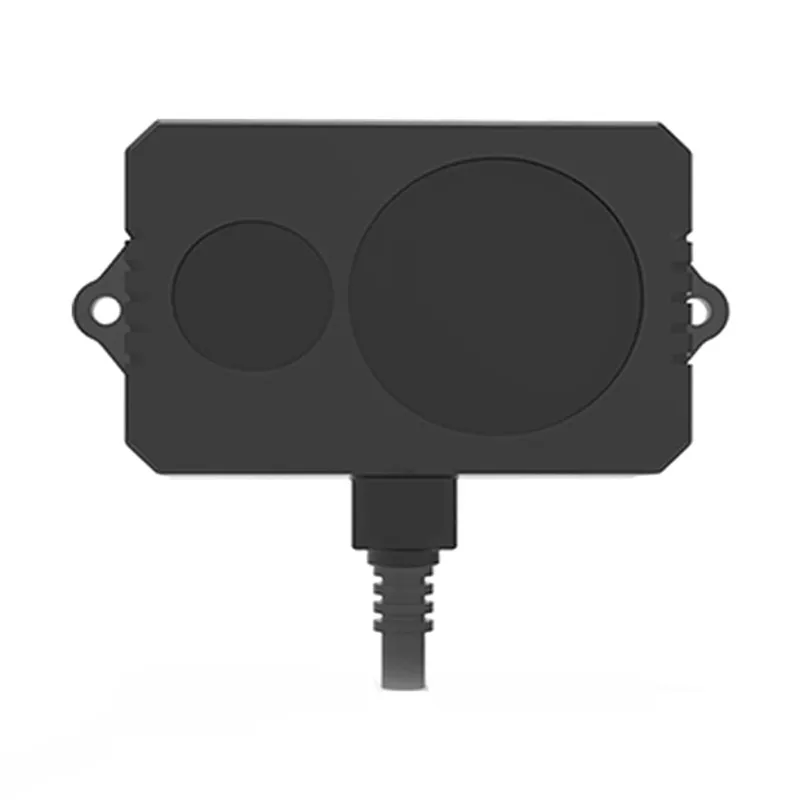 Если водитель решает перестроиться и включает сигнал поворота, система помощи при перестроении дополнительно подает акустическое и/или тактильное предупреждение.
Если водитель решает перестроиться и включает сигнал поворота, система помощи при перестроении дополнительно подает акустическое и/или тактильное предупреждение.
Однако возможности MRR-системы не ограничиваются помощью при перестроении. Сенсоры также являются частью системы предупреждения об опасности, задача которой – помочь водителю при закрытом обзоре сдать назад. Система способна распознавать другие машины, велосипедистов и пешеходов, которые переходят дорогу позади автомобиля, слева или справа на расстоянии до 50 метров. Она оповещает водителя об угрозе столкновения с помощью своевременных аудио — и визуальных сигналов.
Меньше и легче пачки масла
Радарный сенсор Bosch средней дальности стал большим достижением компании. В равной степени эффективны обе версии датчика – как датчик прямого действия, так и датчик сбора информации о дорожной обстановке, входящий в состав систем помощи водителю. «В основе обеих версий продукта лежит технология радара Bosch четвертого поколения», – отметил Штайгер.
Датчик MRR представляет собой бистатический многорежимный радар с четырьмя независимыми каналами приема и цифровым лучом (DBF). Он работает на частоте 76-77 ГГц, что является стандартом для автомобильных радаров практически во всех странах. MMR датчик имеет апертурный угол до 150 градусов и радиус действия до 90 метров. Показатели датчика прямого действия еще более впечатляющие: апертурный угол +/-45 градусов, датчик может фиксировать объекты в зоне до 160 м вокруг авто.
Bosch устанавливает радарные сенсоры средней дальности на передний бампер как в комплекте с такими решениями, как адаптивный круиз-контроль (ACC) и система аварийного торможения, так и как отдельно. Так, с 2016 года для всех транспортных средств, которые хотят получить наивысшие показатели безопасности в тестах Euro NCAP, наличие системы аварийного торможения с использованием радарных датчиков средней дальности является обязательным.
Компактный дизайн MRR-системы Bosch – еще одно ее преимущество. Датчик по весу и размеру – меньше 250-граммовой пачки масла, и легко встраивается даже в самые маленькие автомобили. «Радар средней дальности Bosch – кастомизированное, экономически выгодное решение, которое позволит стандартизировать использование радарных сенсоров во всех отраслях производства транспортных средств», – говорит Герхард Штайгер.
Датчик по весу и размеру – меньше 250-граммовой пачки масла, и легко встраивается даже в самые маленькие автомобили. «Радар средней дальности Bosch – кастомизированное, экономически выгодное решение, которое позволит стандартизировать использование радарных сенсоров во всех отраслях производства транспортных средств», – говорит Герхард Штайгер.
Мобильные технологии (Mobility Solutions) – самое крупное бизнес-направление Bosch Group. В 2013 году его продажи составили 30,6 млрд евро, или 66% общего объема продаж группы компаний. Все это делает Bosch Group одним из крупнейших поставщиков автомобильной отрасли.
Подразделение Mobility Solutions разрабатывает и производит: системы впрыска для двигателей внутреннего сгорания; альтернативные концепты трансмиссий, а также высокопроизводительное и сетевое периферийное оборудование; системы активной и пассивной безопасности при вождении; системы помощи водителю и комфорт-электронику; ПО и системы связи, а также концепции, технологии и сервисы для рынка запчастей.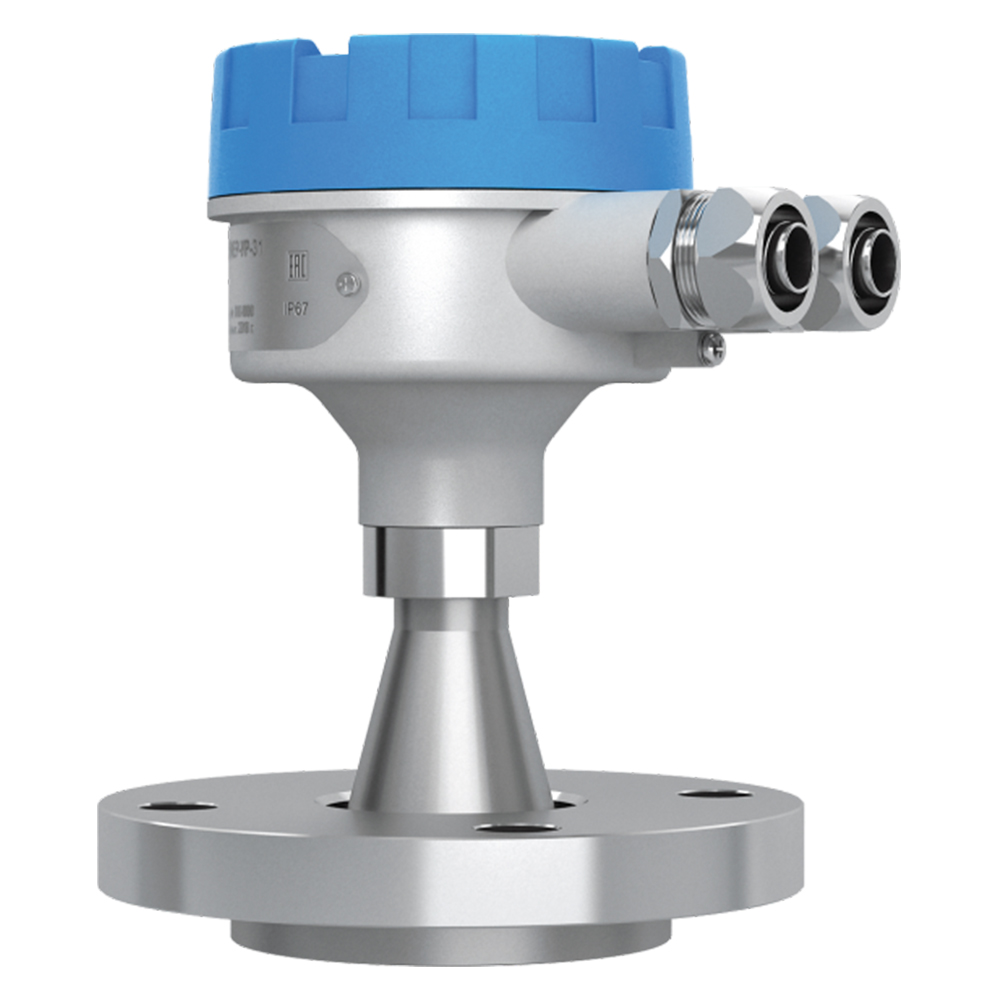 Компания Bosch также разработала такие инновационные решения, как: электронное управление двигателем, антиблокировочную систему ESP и систему прямого дизельного впрыска common-rail.
Компания Bosch также разработала такие инновационные решения, как: электронное управление двигателем, антиблокировочную систему ESP и систему прямого дизельного впрыска common-rail.
Libelium внедряет радарные датчики в системы умной парковки
В ответ на растущую потребность в точной информации о свободных местах для парковки компания Libelium, испанский производитель оборудования и IoT-решений, внедрила радарную технологию в устройства Smart Parking.
Новый узел Smart Parking обеспечивает высокую точность и стабильность работы систем умных парковок, припаркованные над ним автомобили в 99% случаев. Он определяет статус парковочного места — свободно или занято — и отправляет соответствующую информацию в облако по сети LoRaWAN.
Применение IoT-технологии для поиска парковочных мест помогает разгрузить дороги, снизить потребление топлива, сократить выбросы CO2, повысить удобство вождения и в целом улучшить условия жизни в городе. Кроме того, умные датчики широко применяются для контроля муниципальных парковок с ограничением времени стоянки или иными ограничениями: парковок для такси, зон погрузки и выгрузки, станций зарядки электромобилей, парковочных мест для инвалидов и т.![]() д.
д.
Первый подобный проект реализован в г. Уэска (север Испании), где установлено 190 узлов для мониторинга парковочных мест для инвалидов.
Узел Smart Parking, установленный на парковке в г. Уэска (Испания)
Узлы с радарными датчиками работают эффективнее, чем аналогичные устройства с магнитными или инфракрасными датчиками. Они устойчивы к магнитным помехам и не реагируют на припаркованные рядом автомобили. Устройства с радарными датчиками стабильно работают при любом освещении, при продолжительной стоянке автомобиля и не реагируют на дорожное движение, например на проходящий мимо автобус или фуру. Обслуживать такие узлы Smart Parking намного проще, так как они защищены от грязи, пыли, дождя и попадания машинного масла.
«Радар позволяет избежать проблем с калибровкой, которые возникают с другими технологиями. В отличие от магнитного, радарный датчик «видит» припаркованный над ним автомобиль, определяя место как занятое», — рассказывает Давид Гаскон, сооснователь и технический директор Libelium.
Ввод в эксплуатацию стал существенно проще — сейчас узлы поставляются с предустановленными настройками времени и уникальными идентификаторами и ключами сети LoRaWAN. Пользователь может зарегистрировать на сервере сети LoRaWAN все устройства одновременно.
Схема работы системы Smart Parking
Новая платформа позволяет настраивать датчики парковочного места в беспроводном режиме через веб-форму удаленного конфигурирования. В ней можно установить такие параметры, как время ожидания в спящем режиме, время нахождения в активном состоянии, настройки ночного режима и т. д. То есть вы можете установить узлы с заводскими настройками, а затем обновить параметры через облачный сервис. Эта возможность существенно сокращает временные затраты на установку.
Перед отгрузкой с фабрики датчики регистрируют в службе Libelium Services Cloud Manager. С ее помощью каждый пользователь может просмотреть параметры каждого своего узла (регистрация в сервисе бесплатна). Платформу умной парковки можно использовать совместно с Libelium Cloud Bridge, чтобы напрямую отправлять данные в любую совместимую облачную платформу — и создавать приложения для управления парковкой проще и быстрее.
Новые устройства Smart Parking имеют сертификаты CE, FCC и IP68 и доступны для заказа в Европе, США, Латинской Америке, Индии, Азиатско-Тихоокеанском регионе и Австралии.
Подробные сведения о нашей продукции вы можете запросить в Отделе продаж СМАРТ Дистрибьюшн.
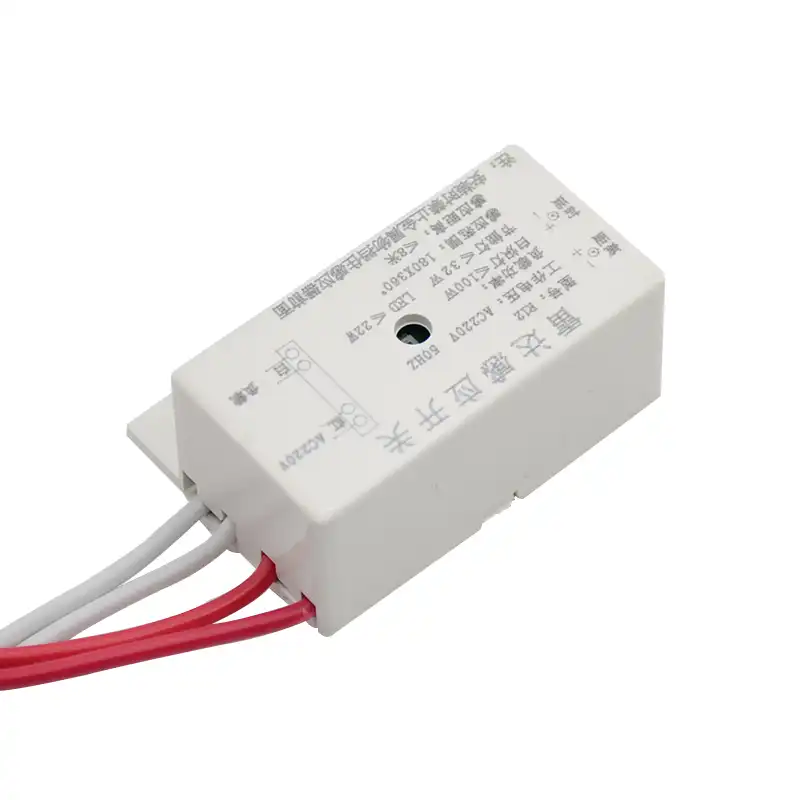
Микроволновый (радарный) датчик движения или колхозим свет в прихожей
Искал на что потратить купон на DX, попалось нечто с чудесным описанием: «Датчик включения света DP-163 500Вт для микроволновой печи — белый (АС 220В)»Зная, что это на самом деле такое, решил взять.
Вот что из этого получилось:
Предыстория: Квартира у меня в сталинке, как результат — длинный коридор и высокий потолок.
Дабы не пропадало место, над входной дверью была сооружена «серверная полка», там разместились бесперебойник, роутер с подключенным HDD на 500 gb (на роутере подняты samba и transmission (торрент-клиент), что позволяет не держать включенным комп) и отдельный NAS на 4Tb для бэкапов. Потребляет это все очень мало.
Потребляет это все очень мало.
Какое-то время свет давала вот такая лампа с детектором движения, но света от нее мало, да и вид колхозный.
Поэтому купил в строительном магазине алюминиевый уголок 10 х 35 мм, толщиной 1.5 мм и длиной 2 метра за огромные деньги — 127 руб ( $3.48 )
Ленты на диодах 5050 у меня были, приводить ссылки смысла нет, те лоты давно закончились. Сейчас можно купить гораздо лучшие, на диодах 5730…
Результат:
Почему используются ленты 2-х цветов? Ну вот по этой причине:
Теплый белый мне не нравится, а холодный белый оказался слишком синюшным. В результате смешения получился очень приятный оттенок.
Крепеж:
Светильник установлен на место:
Результат:
Питание
Для питания можно использовать любой б/п на 12 вольт с током не менее ампераЯ пробовал блок питания с БИКа за $4.29, но у него обнаружился недостаток — он включается с задержкой в пару секунд. Мелочь, а неприятно.

В результате вытащил давно купленный на DX б/п чуть подороже, зато без задержки
Итого — получилось аккуратно, недорого, обеспечивает хороший теплоотвод.
Замер мощности показал ~10W
Света для снятия обуви, одежды более чем достаточно.
Скорей всего заменю такими же самопалами подсветку рабочей зоны на кухне, сейчас висят 2 шт светильника на трубчатых люминесцентных лампах 18w
Далее стоит задача: реализовать автоматическое включение / выключение.
Самое простое — использовать PIR датчик, что и было сделано в первоначальном варианте
PIR датчик
Датчик с БИКа за $5.38Модель специально для встраивания, поэтому имеет выносной датчик
Внутренности:
Недостатки данного конкретного датчика: Нет регулировок времени и чувствительности и громкое механическое реле.
Второй кандидат — микроволновый. Достаточно экзотичный девайс.
Лет 15 назад такого типа датчик стоял у меня в машине (Saturn MMS-2), имел 2 уровня срабатывания, первая зона срабатывала за метр до машины, давала 3 коротких писка, вторая зона срабатывала при проникновении в машину, уже с полной сиреной.
Преимущество — можно ставить на охрану машину с открытыми окнами, например на пляже.
С тех пор я этих датчиков не видел.
Микроволновый датчик
А теперь главное — микроволновый датчик срабатывает не на тепло, а на перемещение массивных электропроводящих предметов в пространстве. Более того, ему не мешают двери, шкафы и даже кирпичные стены.В результате свет может срабатывать даже от перемещения соседей.
Впрочем, ограничить угол действия можно экраном из фольги или консервной банки.
По поводу вредности излучения — никаких сведений не нашел.
Потребляемая датчиками мощность (обоими) — 0.5W
Автомобильный радар-детектор STAR 2039 ничего не обнаружил даже в упор.
Вывод: Испытан еще один тип датчиков движения. В некоторых случаях может быть удобнее инфракрасного.
P.S. Ищу давно датчик, который видел лет 20 назад, когда работал КИП-овцем на заводе — коробка с 2-мя линзами размером со спичечный коробок. ИК излучатель и приемник в одном корпусе. Мишенью служил уголковый отражатель, он же «катафот», дальность до 8 метров.
Мишенью служил уголковый отражатель, он же «катафот», дальность до 8 метров.
Вся прелесть в том, что датчик срабатывал не на движение, а на пересечение луча.
Пока на линии луча есть помеха — датчик «сработан».
Если поставить в туалет — не нужно махать руками для включения света 🙂
Никому не попадался такой датчик?
Микроволновый (радарный) датчик движения или колхозим свет в прихожей
Искал на что потратить купон на DX, попалось нечто с чудесным описанием: «Датчик включения света DP-163 500Вт для микроволновой печи — белый (АС 220В)»Зная, что это на самом деле такое, решил взять.
Вот что из этого получилось:
Предыстория: Квартира у меня в сталинке, как результат — длинный коридор и высокий потолок.
Дабы не пропадало место, над входной дверью была сооружена «серверная полка», там разместились бесперебойник, роутер с подключенным HDD на 500 gb (на роутере подняты samba и transmission (торрент-клиент), что позволяет не держать включенным комп) и отдельный NAS на 4Tb для бэкапов. Потребляет это все очень мало.
Потребляет это все очень мало.
Какое-то время свет давала вот такая лампа с детектором движения, но света от нее мало, да и вид колхозный.
Поэтому купил в строительном магазине алюминиевый уголок 10 х 35 мм, толщиной 1.5 мм и длиной 2 метра за огромные деньги — 127 руб ( $3.48 )
Ленты на диодах 5050 у меня были, приводить ссылки смысла нет, те лоты давно закончились. Сейчас можно купить гораздо лучшие, на диодах 5730…
Результат:
Почему используются ленты 2-х цветов? Ну вот по этой причине:
Теплый белый мне не нравится, а холодный белый оказался слишком синюшным. В результате смешения получился очень приятный оттенок.
Крепеж:
Светильник установлен на место:
Результат:
Питание
Для питания можно использовать любой б/п на 12 вольт с током не менее ампераЯ пробовал блок питания с БИКа за $4.
 29, но у него обнаружился недостаток — он включается с задержкой в пару секунд. Мелочь, а неприятно.
29, но у него обнаружился недостаток — он включается с задержкой в пару секунд. Мелочь, а неприятно.В результате вытащил давно купленный на DX б/п чуть подороже, зато без задержки
Итого — получилось аккуратно, недорого, обеспечивает хороший теплоотвод.
Замер мощности показал ~10W
Света для снятия обуви, одежды более чем достаточно.
Скорей всего заменю такими же самопалами подсветку рабочей зоны на кухне, сейчас висят 2 шт светильника на трубчатых люминесцентных лампах 18w
Далее стоит задача: реализовать автоматическое включение / выключение.
Самое простое — использовать PIR датчик, что и было сделано в первоначальном варианте
PIR датчик
Датчик с БИКа за $5.38Модель специально для встраивания, поэтому имеет выносной датчик
Внутренности:
Недостатки данного конкретного датчика: Нет регулировок времени и чувствительности и громкое механическое реле.

Второй кандидат — микроволновый. Достаточно экзотичный девайс.
Лет 15 назад такого типа датчик стоял у меня в машине (Saturn MMS-2), имел 2 уровня срабатывания, первая зона срабатывала за метр до машины, давала 3 коротких писка, вторая зона срабатывала при проникновении в машину, уже с полной сиреной.
Преимущество — можно ставить на охрану машину с открытыми окнами, например на пляже.
С тех пор я этих датчиков не видел.
Микроволновый датчик
А теперь главное — микроволновый датчик срабатывает не на тепло, а на перемещение массивных электропроводящих предметов в пространстве. Более того, ему не мешают двери, шкафы и даже кирпичные стены.В результате свет может срабатывать даже от перемещения соседей.
Впрочем, ограничить угол действия можно экраном из фольги или консервной банки.
По поводу вредности излучения — никаких сведений не нашел.
Потребляемая датчиками мощность (обоими) — 0. 5W
5W
Автомобильный радар-детектор STAR 2039 ничего не обнаружил даже в упор.
Вывод: Испытан еще один тип датчиков движения. В некоторых случаях может быть удобнее инфракрасного.
P.S. Ищу давно датчик, который видел лет 20 назад, когда работал КИП-овцем на заводе — коробка с 2-мя линзами размером со спичечный коробок. ИК излучатель и приемник в одном корпусе. Мишенью служил уголковый отражатель, он же «катафот», дальность до 8 метров.
Вся прелесть в том, что датчик срабатывал не на движение, а на пересечение луча.
Пока на линии луча есть помеха — датчик «сработан».
Если поставить в туалет — не нужно махать руками для включения света 🙂
Никому не попадался такой датчик?
Датчики расстояния — RADAR
|
 Эти датчики используются адаптивным круиз-контролем и / или системами предотвращения столкновений. Большинство существующих датчиков движения используют радар 76,5 ГГц, но другие частоты (например.г. 24 ГГц, 35 ГГц и 79 ГГц) также используются. Некоторые системы используют инфракрасные датчики вместо (или в дополнение к) датчиков RADAR.
Эти датчики используются адаптивным круиз-контролем и / или системами предотвращения столкновений. Большинство существующих датчиков движения используют радар 76,5 ГГц, но другие частоты (например.г. 24 ГГц, 35 ГГц и 79 ГГц) также используются. Некоторые системы используют инфракрасные датчики вместо (или в дополнение к) датчиков RADAR.
 com, апрель 2000 г.
com, апрель 2000 г.Рынок радарных датчиков | 2021 — 26 | Доля отрасли, размер, рост
Обзор рынка
| Период обучения: | 2019-2025 |
| Базовый год: | 2019 г. |
| Самый быстрорастущий рынок: | Азиатско-Тихоокеанский регион |
| Крупнейший рынок: | Северная Америка |
| CAGR: | 18.36% |
Нужен отчет, отражающий влияние COVID-19 на этот рынок и его рост?
Бесплатное скачивание ОбразецОбзор рынка
Рынок радарных датчиков оценивался в 10 долларов США. 32 миллиарда в 2019 году, и ожидается, что к 2025 году он достигнет 22 миллиардов долларов США, при этом среднегодовой темп роста составит 18,36% в течение прогнозируемого периода (2020-2025 годы). Быстро развивающаяся автоматизация, такая как развитие автономного вождения и развитие Индустрии 4.0, указывает на растущую потребность в обнаружении присутствия и движения для повышения безопасности и контроля.
32 миллиарда в 2019 году, и ожидается, что к 2025 году он достигнет 22 миллиардов долларов США, при этом среднегодовой темп роста составит 18,36% в течение прогнозируемого периода (2020-2025 годы). Быстро развивающаяся автоматизация, такая как развитие автономного вождения и развитие Индустрии 4.0, указывает на растущую потребность в обнаружении присутствия и движения для повышения безопасности и контроля.
- Применение радарных датчиков становится все более разнообразным, а коммерциализация в этом секторе ускоряется благодаря значительным достижениям в цифровых и радиочастотных / микроволновых технологиях.В настоящее время существуют различные приложения для радаров, от традиционных систем защиты и наблюдения до автомобильных радаров для помощи водителю и биомедицинских радаров для визуализации, мониторинга и лечения. Для всех этих приложений конкурентная среда требует быстрых циклов проектирования, системной интеграции, прототипирования и тестирования.
- Сегмент систем безопасности занимал наибольшую долю на изученном рынке в размере 8,83 миллиарда долларов США, за ним следуют управление освещением и управление энергопотреблением.
 Ожидается, что эти сегменты значительно расширятся и будут способствовать росту рынка радарных датчиков в течение прогнозируемого периода.
Ожидается, что эти сегменты значительно расширятся и будут способствовать росту рынка радарных датчиков в течение прогнозируемого периода. - Кроме того, внедрение радара углов для 360-градусного наблюдения за автомобилем, поддерживаемого радарами ближнего и среднего диапазона с частотой 24 ГГц, набирает обороты для отслеживания с высоким разрешением. Это улучшает разделение целей или распознавание объектов с большим количеством каналов для РЛС с высоким разрешением.
- Такие разработки уже начались среди стартапов, таких как Metawave и Under. Ожидается, что эти инновации привлекут новые инвестиции по всей цепочке поставок. Кроме того, Hyundai недавно объявила об инвестировании в Metawave для улучшения радаров, используемых в ее беспилотных автомобилях.
Объем отчета
Радарные датчики используют радар непрерывного действия с частотной модуляцией для обнаружения движущихся и неподвижных объектов, включая автомобили, поезда, автобусы, грузовики и грузы, в экстремальных условиях. Датчики на основе радара идеально подходят для предотвращения столкновений бортового мобильного оборудования, такого как ричстакеры, вилочные погрузчики и горнодобывающие машины, или портовой техники, такой как перевозчики, погрузчики и грузоотправители.
Датчики на основе радара идеально подходят для предотвращения столкновений бортового мобильного оборудования, такого как ричстакеры, вилочные погрузчики и горнодобывающие машины, или портовой техники, такой как перевозчики, погрузчики и грузоотправители.
| По типу | |
| Радар для визуализации | |
| Радар без визуализации |
| По диапазону | |
| Радарный датчик ближнего действия | |
| Средний Радарный датчик | |
| Радарный датчик дальнего действия |
| Конечный пользователь | ||
| Автомобильная промышленность | ||
| Безопасность и наблюдение | ||
| Промышленная среда | ||
| Промышленная среда и окружающая среда Мониторинг погоды | ||
| Мониторинг трафика | ||
| Другие конечные пользователи |
| По географии | |
| Северная Америка | |
| Европа | |
| Азия- Тихоокеанский регион | |
| Латинская Америка | |
| Ближний Восток и Африка |
Объем отчета может быть
настроены в соответствии с вашими требованиями. Кликните сюда.
Кликните сюда.
Ключевые тенденции рынка
Автомобильные датчики будут иметь наибольший рост в течение прогнозного периода
- Устойчивый рост рынка автономных автомобилей способствовал развитию рынка радарных датчиков. Радарная технология поддерживается Программой оценки новых автомобилей среди OEM-производителей, поскольку они интегрируют эти системы в дополнение к камерам для приложений ADAS.Радары в сочетании с другими датчиками предоставляют расширенную информацию о безопасности и предотвращении столкновений.
- Рост рынка автомобильных радарных датчиков в основном объясняется увеличением количества применений AEB (автоматическое экстренное торможение) на рынке радаров 77 ГГц.
- В связи с недавним акцентом на безопасность в Соединенных Штатах, таким как выпуск нового федерального руководства для автоматизированных транспортных средств — Автоматизированные транспортные средства 3.
 0 от NHTSA, рыночный потенциал ADAS был расширен до автомобилей среднего уровня, что привело к увеличению объема производства. увеличивать.Многие бренды все чаще используют радарные датчики. Вышеупомянутые факторы существенно влияют на рынок радарных датчиков.
0 от NHTSA, рыночный потенциал ADAS был расширен до автомобилей среднего уровня, что привело к увеличению объема производства. увеличивать.Многие бренды все чаще используют радарные датчики. Вышеупомянутые факторы существенно влияют на рынок радарных датчиков. - Кроме того, с появлением и спросом на интеллектуальные и беспилотные автомобили рынок радарных датчиков, как ожидается, значительно вырастет благодаря развитию автомобильного сектора.
Чтобы понять основные тенденции, загрузите образец Отчет
Северная Америка займет наибольшую долю на рынке
- Рынок радарных датчиков в Северной Америке определяется высокотехнологичными оборонными приложениями, распространением смартфонов, автономными автомобилями и бытовой электроникой.

- В регионе набирает обороты рост приложений FMCW, особенно приложений ближнего действия, поскольку в этом регионе самые высокие расходы на оборону в мире, которые в 2018 году составили 648 миллиардов долларов США.
- Североамериканский регион является пионером во внедрении новых технологий, таких как умные сети, умные дома, умные сети водоснабжения, интеллектуальный транспорт и инфраструктура с датчиками, использующими технологию радарных датчиков.
- Ожидается, что имитация трассировки лучей заменит приводные испытания автомобильного радарного датчика.
- По данным GSMA, внедрение смартфонов вырастет с 80% в 2017 году до 91% в 2025 году, что также может способствовать развитию рынка радарных датчиков.
- Сегмент систем безопасности занимал наибольшую долю на изученном рынке в размере 8,83 миллиарда долларов США, за ним следуют управление освещением и управление энергопотреблением. Ожидается, что в течение прогнозируемого периода в регионе эти сегменты значительно увеличатся, что будет способствовать росту рынка радарных датчиков.

Чтобы понять тенденции в географии, загрузите образец Отчет
Конкурентная среда
Рынок радарных датчиков сильно фрагментирован из-за присутствия большого количества игроков.Некоторые из видных игроков на рынке включают Роберта Боша, Lockheed Martin и NXP Corporation, среди прочих. За последние несколько лет отрасль претерпела несколько изменений, которые существенно изменили ее.
- Январь 2020 г. — Компания Bosch начала производство лидарных датчиков дальнего действия, которые представляют собой первую лидарную систему (обнаружение света и дальность), подходящую для использования в автомобилях. Эта технология измерения расстояния на основе лазера незаменима для функций вождения на уровнях 3-5 SAE.
- май 2019 г. — Исследователи из Института лазерных технологий им. Фраунгофера разработали процесс нанесения покрытия, позволяющий интегрировать радарные датчики с фарами автомобилей.
Содержание
1. ВВЕДЕНИЕ
1.1 Допущения исследования и определение рынка
1.2 Объем исследования
2. МЕТОДОЛОГИЯ ИССЛЕДОВАНИЯ
3. ОБЩАЯ ИНФОРМАЦИЯ
4. ИНФОРМАЦИЯ О РЫНКЕ
4.1 Обзор рынка
- 9011 Анализ цепочки добавленной стоимости
4.3 Привлекательность отрасли — анализ пяти сил Портера
4.3.1 Торговая сила поставщиков
4.3.2 Торговая сила покупателей
4.3.3 Угроза новых участников
4.
 3.4 Интенсивность замещающего продукта
3.4 Интенсивность замещающего продукта4.3.5 Угроза конкурентного соперничества
5. ДИНАМИКА РЫНКА
5.1 Драйверы рынка
11
5.1 Драйверы рынка
11
- 5.1.1 Возрастающая потребность в национальной безопасности
5.1.2 Увеличение количества автономных автомобилей и акцент на потребности в безопасности
5.2 Проблемы рынка
5.2.1 Высокие затраты на НИОКР и техническое обслуживание
6. СЕГМЕНТАЦИЯ РЫНКА
6,1 По типу
6.1.1 Радар для визуализации
6.1.2 Неизображающий радар
6,2 По дальности
6.2.1 Радиолокационный датчик ближнего действия
6.2.2 Радиолокационный датчик среднего радиуса действия
6.2.3 Радиолокационный датчик дальнего действия
6.
 3 Конечный пользователь
3 Конечный пользователь6.3.1 Автомобильная промышленность
6.3.2 Безопасность и наблюдение
6.3.3 Промышленность
6.3.4 Окружающая среда и мониторинг погоды
6.3.5 Мониторинг трафика
6.3.6 Другие конечные пользователи
6.4 По географии
6.4.1 Северная Америка
6.4.2 Европа
6.4.3 Азиатско-Тихоокеанский регион
6.4.4 Латинская Америка
6.4.5 Ближний Восток и Африка
7. КЛЮЧЕВЫЕ ПРОФИЛИ ПОСТАВЩИКА *
7.1 Robert Bosch GmbH
7.2 Continental AG
7.3 Denso Corporation
7.4 Delphi Automotive LLP
7.5 Hella KGaA Hueck & Co.
7,6 Infineon Technologies AG
7,7 Baumer Group
7,8 Lockheed Martin Corporation
7,9 NXP Semiconductors NV
7,10 Smart Microwave Sensors GmbH
9011
7,12 Veoneer Inc.
7,13 STMicroelectronics NV
7,14 Hitachi Automotive Systems (Hitachi Ltd)
7.15 Banner Engineering Corporation
8. ИНВЕСТИЦИОННЫЙ АНАЛИЗ
9. БУДУЩЕЕ РЫНКА
** При наличии
Вы также можете приобрести части этого отчета. Вы хотите проверить раздел мудрый прайс-лист?
Получить разбивку цен Сейчас жеЧасто задаваемые вопросы
Каков период изучения этого рынка?
Рынок радарных датчиков изучается с 2019 по 2025 год.
Каковы темпы роста рынка радарных датчиков?
Рынок радарных датчиков растет среднегодовыми темпами 18,36% в течение следующих 5 лет.
В каком регионе наблюдается самый высокий рост рынка радарных датчиков?
Азиатско-Тихоокеанский регион демонстрирует самый высокий среднегодовой темп роста в период с 2021 по 2026 год.
Какой регион имеет наибольшую долю на рынке радарных датчиков?
Северная Америка занимает наибольшую долю в 2019 году.
Кто основные игроки на рынке радарных датчиков?
Robert Bosch GmbH, Lockheed Martin Corporation, NXP Semiconductors NV, Infineon Technologies AG, Denso Corporation — основные компании, работающие на рынке радарных датчиков.
80% наших клиентов ищут отчеты на заказ. Как ты хотите, чтобы мы адаптировали вашу?
Пожалуйста, введите действующий адрес электронной почты!
Пожалуйста, введите правильное сообщение!
ОТПРАВИТЬЗагружается …
Радарный датчик— обзор
1 Введение
В отличие от своих оптических аналогов, радарные датчики с синтезированной апертурой (SAR) обычно не подвержены влиянию неблагоприятных атмосферных условий и наличия облаков (Lee and Pottier, 2009) и могут использоваться в ни днем, ни ночью.Однако визуальное качество изображений SAR ухудшается из-за внезапных изменений интенсивности изображения с рисунком «соль и перец» из-за большого количества пятен, мультипликативного негауссовского шума, который пропорционален интенсивности принимаемого сигнала. (Мотт, 2006).
Чтобы уменьшить спекл, можно, например, использовать несколько видов при генерации сложных изображений, но это вызывает ухудшение пространственного разрешения. Другой альтернативой является использование фильтров, которые могут или не могут учитывать модель шума.Упорядоченные статистические фильтры (OSF) (Bovik et al., 2005) не зависят от модели и относятся к классу нелинейных фильтров, основанных на статистике порядка (Pitas and Venetsanopoulos, 2013). При наличии окна вокруг центрального пикселя результатом использования OSF является замена значения центрального пикселя линейной комбинацией значений пикселей в окне. Зависимые от модели фильтры также могут использоваться для уменьшения шума, но они значительно сложнее, чем их независимые от модели аналоги.Некоторые важные зависящие от модели фильтры, используемые для уменьшения спеклов, — это так называемый фильтр Ли (Lee et al., 1991, 1999) и его разновидности, такие как усовершенствованный фильтр Lee (R-Lee) (Lee et al., 2006). . Более поздние подходы к модельно-зависимым фильтрам для SAR включают стохастические расстояния и нелокальные средние (SDNLM) (Torres et al., 2014), основанные на методологии нелокальных средних Buades et al. (Buades et al., 2005).
Вычислительный интеллект — это название, которое в настоящее время используется для области, объединяющей нейронные сети, эволюционные системы и нечеткие системы.Применение методов вычислительного интеллекта для решения задач оптимизации известно как интеллектуальная оптимизация. Два важных интеллектуальных метода оптимизации, часто используемых в приложениях, — это генетические алгоритмы (GA), основанные на естественном отборе и генетике (Holland, 1975; Goldberg, 1989), и оптимизация роя частиц (PSO), вдохновленная совместным поведением в природе, например стая птиц и стая рыб (Kennedy and Eberhart, 1995).
В предыдущей статье (Torres et al., 2015), мы представили фильтры OWA, независимый от модели класс фильтров, построенный с использованием операторов упорядоченного взвешенного среднего (OWA) (Yager, 1988), семейства операторов среднего из области теории нечетких множеств, которые выполняют выпуклую комбинацию набор упорядоченных значений. В этих фильтрах все коэффициенты неотрицательны и в сумме равны 1; поскольку они представляют собой особый тип OSF. В этой работе мы также сообщили об использовании ГА (Голландия, 1975; Голдберг, 1989) для изучения параметров (вектора веса) в эксперименте пятикратной перекрестной проверки с 50 синтетическими изображениями интенсивности HH, полученными из реальной сцены.Мы использовали окно 3 × 3 и получили лучшие результаты в соответствии с нормализованной среднеквадратической ошибкой (NMSE), чем с другими OSF, такими как среднее и медианное значение, но оказались хуже, чем R-Lee и SDNM.
В этой главе мы расширяем работу Торреса и др. (2015) и рассмотрим, как узнать векторы OWA, когда доступны несколько поляризаций из изображения SAR. Мы исследуем использование двух стратегий; в первом из них один вектор изучается отдельно для каждой поляризации, а во втором — векторы весов для каждой поляризации изучаются совместно.Кроме того, вместо окна 3 × 3 мы используем окно 5 × 5 (как это сделано в R-Lee и SDNM) на тех же изображениях, которые использовались в Torres et al. (2015). Использование большего окна привело к лучшим результатам для всех рассмотренных OSF; в частности, изученные фильтры OWA показали лучшие результаты, чем R-Lee и SDNM.
Работа организована следующим образом. В разделах 2–4 обсуждаются изображения и фильтры SAR, фильтры GA и OWA соответственно. В разделах 5 и 6, соответственно, описывается наше предложение по изучению операторов фильтра OWA для нескольких поляризаций с использованием GA и эксперимента с изображениями SAR, соответственно.Раздел 7 — это заключение.
Автомобильные радарные датчики и перегруженный радиоспектр: поле битвы городской электроники?
По мере того, как автомобильные радары становятся все более распространенными, сильно занятый радиочастотный спектр будет напоминать электронное поле битвы в городской среде. Радар столкнется с комбинацией непреднамеренных или преднамеренных атак с помехами, и разработчики должны реализовать методы борьбы с помехами, подобные тем, которые используются в радиоэлектронной борьбе (РЭБ).
Автомобильный радар обычно может испытывать блокирующую или обманчивую атаку.Отрицание глушения ослепляет радар жертвы. Этот метод снижает отношение сигнал / шум и, как следствие, снижает вероятность обнаружения цели. С другой стороны, ложные помехи заставляют радар жертвы «думать» о ложных целях. Радар жертвы теряет способность отслеживать реальные цели и, следовательно, сильно влияет на поведение машины жертвы.
Эти атаки с помехами могут быть вызваны взаимными помехами между автомобильными радарами или произойти намеренно, просто направив сильный непрерывный сигнал (CW) на радар жертвы с использованием недорогого аппаратного обеспечения.
В то время как современные методы предотвращения помех могут быть адекватными на сегодняшний день, с распространением радарных датчиков необходимо будет использовать устойчивый тип методов смягчения помех сам по себе или в сочетании с подходами по предотвращению помех. Устойчивые методы включают обработку сигналов в частотно-временной области или сложные формы сигналов радара.
осциллограммы радара
Форма сигнала радара является одним из критических параметров системы, определяющих работу датчика при наличии источников помех.Автомобильные радары в сегодняшнем диапазоне 77 ГГц в основном используют сигналы типа FMCW. В радаре FMCW сигнал CW линейно качается или чирпируется по частоте в радиочастотном диапазоне. На рис. 1 показан пример формы сигнала чирповой последовательности (CS) FMCW.
Рисунок 1. Пример FMCW CS.Разность частот (f b , частота биений) пропорциональна расстоянию R до цели и может быть определена следующим соотношением:
Последствия заклинивания
Помехи возникают в плотной радиочастотной среде, когда радарные датчики FMCW работают в одной и той же части полосы частот.См. Типичный пример глушителя встречного автомобиля на рис. 2.
Рисунок 2. Примеры а) подавления помех FMCW и б) ложных помех FMCW.Denial Jamming
Произвольный сигнал сильных помех типа FMCW, попадающий в полосу пропускания приемника, увеличивает минимальный уровень шума радара-жертвы. Это подавление помех может привести к исчезновению небольших целей (то есть с малым радиолокационным поперечным сечением (RCS)) из-за плохого отношения сигнал / шум.
Атака отказа также может быть проведена целенаправленно, просто направив сильный CW-сигнал на FMCW-радар жертвы.Воздействие в радаре жертвы будет аналогично случаю постановки помех FMCW (см. Рисунок 4).
Обманчивое подавление
Если развертка сигнала глушения синхронизирована, но задерживается с радаром-жертвой, то удар будет ложным срабатыванием ложной цели на фиксированной дальности. Такие приемы распространены среди постановщиков помех РЭБ. Встречный автомобильный радар подобного типа будет действовать как непреднамеренный источник помех. Однако вероятность согласования по времени между радиолокатором жертвы и радиолокатором помех будет очень мала.Смещение задержки генератора помех, которое меньше максимальной задержки дальности действия радара-жертвы, может выглядеть как реальная цель. Например, для максимального диапазона 200 м потребуется выравнивание развертки менее 1,3 мкс. Однако такая обманчивая атака могла быть осуществлена намеренно с использованием сложного оборудования типа РЭБ, установленного на встречной автомобильной платформе.
В более общем смысле, ложные помехи основаны на ретрансляции сигнала радара-жертвы с систематическим изменением задержки и частоты.Это может быть либо некогерентный, когда глушитель называется ретранслятором, либо когерентный, когда он является ретранслятором. Ретрансляторы принимают, изменяют и повторно передают один или несколько сигналов подавления, тогда как ретрансляторы передают заранее определенный сигнал, когда желаемый сигнал жертвы обнаруживается подавителем помех.
Для сложной атаки на основе ретранслятора обычно требуется цифровая радиочастотная память (DRFM). DRFM способен выполнять скоординированную задержку по дальности и атаки доплеровского затвора. Таким образом, дальность ложной цели и доплеровские свойства сохраняются, чтобы обмануть радар жертвы.
Методы устранения помех
Основной подход: избегание
Основные методы уменьшения радиолокационных помех в основном основаны на методе уклонения. Цель состоит в том, чтобы уменьшить вероятность перекрытия в пространстве, времени и частоте, например:
- Пространственный: использование узкого луча с электронным сканированием может снизить риск возникновения помех. Типичное поле зрения радара автомобильного круиз-контроля (ACC) дальнего действия составляет ± 8 °. Тем не менее, через боковые лепестки антенны может действовать сильный глушитель.
- Temporal: Рандомизируйте параметры крутизны частотной модуляции FMCW, чтобы избежать периодических помех.
- Spectral: рандомизируйте начальную и конечную частоты частотной модуляции FMCW, чтобы уменьшить вероятность перекрытия и помех.
Основные методы рандомизации позволят избежать случайной синхронизации с другими радарами, но могут быть не так полезны в плотной среде радиочастот. Растущее число радарных датчиков потребует более сложных методов противодействия для уменьшения помех.
Стратегический подход: обнаружение и устранение
Альтернативный метод предотвращения может использоваться для восстановления принятой формы волны с использованием алгоритмов обработки сигналов. Методы частотно-временной области могут быть эффективными против типа подавления атак типа отрицания. В сценарии подавления FMCW встречного автомобиля устройство подавления перехватывает все элементы разрешения по частоте в течение очень короткого промежутка времени. Этот быстро меняющийся во времени сигнал проявляется как повышенный уровень шума в обычной области БПФ. Метод обработки сигналов в частотно-временной области передает сигнал в другую область, где легче отфильтровать помехи по сравнению с областью БПФ (см. Рисунок 3).
Рис. 3. БПФ и STFT-представление формы сигнала ПЧ радарного эхо-сигнала.Для изменяющихся во времени сигналов кратковременное преобразование Фурье (STFT) предоставляет больше информации, чем обычное FFT. Для устранения узкополосных помех можно использовать основанные на STFT методы. STFT по существу перемещает окно по сигналу и берет FFT оконной области. Сигнал фильтруется в частотной области, чтобы удалить компоненты глушителя, прежде чем он будет преобразован обратно во временную область.
На рисунке 4 показан типичный сценарий подавления FMCW перекрывающихся последовательностей ЛЧМ-сигнала РЧ вместе с результирующим сигналом биений ПЧ в области STFT.
Рис. 4. Область STFT, слева: радар и генератор помех FMCW, справа: область ПЧ.Графики справа на Рисунке 4 показывают область ПЧ, которая является конечным результатом смешивания радиолокационного (синий) и помехового (оранжевый) сигналов. Горизонтальная линия указывает на цель, а вертикальные линии в форме буквы V указывают на наличие сигнала помех.
Подобные или противоположные направления помех FMCW, или даже CW-подобный медленный щебетание, имеют аналогичные воздействия на сигнал ПЧ. Во всех этих сценариях помех быстро движущийся V-образный сигнал ПЧ повышает уровень шума в обычной области БПФ, как показано на рисунке 3.
Маскирование на основе амплитуды может использоваться для фильтрации сигнала помех в области STFT. Это, конечно, предполагает, что передняя часть РЛС жертвы и квантование имеют достаточный динамический диапазон для одновременной линейной обработки более сильного сигнала глушителя и небольшой намеченной цели. См. Рисунок 5.
Рисунок 5. Маскирование на основе амплитуды в области STFT.Верхнее изображение на Рисунке 5 показывает сильное подавление помех, а нижнее — STFT после обработки. Несколько реальных целей не видны при наличии сильного постановщика помех, как наверху.Глушитель V-образной формы на нижнем графике удален, и теперь цели с низким SNR будут различимы при переносе обратно во временную область.
Метод подавления помех на основе STFT может использоваться в сценариях подавления помех от сильных источников помех. Для атак с использованием ложных помех только STFT не может определить, является ли ответный сигнал реальным или ложным.
Зашифрованный RF
Элементарной мерой противодействия для уменьшения воздействия ложных помех от атак ретранслятора является использование сигналов радара с низкой вероятностью перехвата (LPI).Цель радара LPI — избежать обнаружения за счет распределения излучаемой энергии по широкому спектру частот, обычно с помощью квазислучайной развертки, модуляции или скачкообразных последовательностей. FMCW — это тип сигнала LPI. Если фазовое кодирование или шифрование вводится в частотный чирп, можно дополнительно снизить вероятность перехвата DRFM сигнала автомобильного радара.
Зашифрованная радиочастотная подпись, уникальная для каждого радиолокационного датчика, может подтвердить обратный сигнал. На рисунке 6 показан пример использования, когда два идентичных радара (один из которых установлен на другом автомобиле) со сдвигом частоты и задержкой между ними создают ложную цель в радаре жертвы.Радиолокатор помех синхронизируется по времени (одинаковый наклон и короткое смещение) с радиолокатором-жертвой.
Рисунок 6. Помехи из-за идентичных радаров со сдвигом частоты и задержкой. Радары FMCWс фазовым кодированием могут обеспечить высокую устойчивость к помехам в этом случае использования. Использование ортогональных кодов также может сделать работу радара MIMO возможной за счет включения нескольких одновременных сигналов передачи.
Требования к кодированию:
- Длина кода: Цель состоит в том, чтобы достичь минимальных уровней боковых лепестков дальности с помощью коротких последовательностей.Длина последовательности PRN, равная 1024, дает пиковый уровень боковых лепестков (PSLL) около 30 дБ (10log1024). Коды передачи вместе с весами фильтра приема могут быть оптимизированы для улучшения PSLL за счет SNR.
- Хорошие свойства взаимной корреляции: коэффициенты взаимной корреляции элементов набора должны быть равны нулю для достижения хорошего разделения между датчиками
- Доплеровское сопротивление: характеристики радара с фазовым кодированием могут пострадать из-за доплеровского сдвига. Двоичные коды не переносят Доплера.Полифазные коды деградируют медленнее, чем двоичные коды.
- Доступное количество различных кодов: В большой семье лучше присвоить уникальный код каждому радиолокационному датчику.
На рисунке 7 показано эхо-сигнал радара без фазового кодирования. Глушильный сигнал проявляет себя как ложная цель. Когда сигнал FMCW передатчика кодируется по фазе с помощью последовательности PRN, сигнал помех может быть подавлен, как показано на рисунке 8.
Рисунок 7. Возвращение радара без фазового кодирования ложных и реальных целей.Рис. 8. Обратный сигнал радара с фазовой кодировкой и без нее.При использовании этого метода ограничен динамический диапазон. Однако процессор радиолокационных сигналов может использовать FMCW с фазовым кодированием для нескольких звуковых сигналов, чтобы отметить ложную цель, а затем вернуться в нормальный режим работы.
Заключение и будущие тенденции
Заглушки в перегруженной среде автомобильных радарных датчиков можно уменьшить с помощью передовых алгоритмов обработки сигналов и методов генерации сложных сигналов. Методы обработки сигналов на основе STFT могут использоваться против атак типа отказа.FMCW с фазовым кодированием обеспечивает дополнительный уровень сопротивления как некогерентным, так и когерентным обманным атакам за счет усиления обработки и предотвращения перехвата. См. Таблицу 1 для обзора методов смягчения.
| Тип блокировки | Отказ | Обман | |
| Заклинивание HW | Другой радиолокационный датчик или простой генератор непрерывного сигнала | DRFM (когерентный) | Транспондер (некогерентный) |
| Воздействие на пострадавшего РЛС | Плохое SNR | Ложная цель | Ложная цель |
| Устойчивый метод смягчения последствий | STFT | Фазовое кодирование FMCW | Фазовое кодирование FMCW |
| Принцип смягчения последствий | Ремонт формы обратной волны радара | Обнаружение побега | Выигрыш при обработке кодовой последовательности |
| Эффективность смягчения последствий (ожидаемая) | Высокая | Умеренный | Хорошо |
Ранее подробно описанные принципы уменьшения помех для автомобильных радаров также применимы к другим средам радиолокационных датчиков — например, робототехнике, платным дорогам, GPS и системам посадки или предотвращения столкновений БПЛА.
В настоящее время автомобильные радарные датчики работают в некооперативном режиме, не связываясь друг с другом. Хотя совместный режим работы потребует общесистемной гармонизации, арбитраж между радиолокационными датчиками может помочь решить проблему помех.
Будущая концепция радара, включающая взаимодействие датчиков, будет объединением узлов связи и радарных датчиков. Будущие радары со сложной формой волны также предлагают возможность включать информацию в радиолокационный сигнал.Одно и то же HW можно было использовать одновременно для радара и связи (RadCom).
RadCom: единая система для одновременной работы радара и связи:
- Возможность многопользовательской работы без помех
- Кодирование радиолокационного сигнала с помощью OFDM или аналогичных коммуникационных кодов дает возможность включать информацию в радиолокационный сигнал
- Одновременная передача сигналов радара на основе OFDM
Решения для приемопередатчиков миллиметрового диапазона 5G от ADI с полосой пропускания более ГГц и возможностями управления лучом могут быть потенциальным кандидатом на концепцию системы RadCom.
ADI находится в уникальном положении для разработки как современных радарных датчиков, так и решений 5G миллиметрового диапазона, чтобы проложить путь для будущих систем RadCom.
Analog Devices Drive360, технология 28 нм CMOS Radar:
Платформа КМОП-радаров Drive360 ™ компанииADI обеспечивает множество вариантов интеграции высокоуровневой обработки сигналов и даже позволяет настраивать IP-интеграцию, позволяя разработчикам дифференцировать свои системы. Платформа сопровождается высокоинтегрированным сопутствующим чипом для управления питанием.Эта система обеспечивает Tier 1 и OEM-производителям высокую производительность, необходимую для создания надежных решений для новых приложений автономного вождения.
5G миллиметрового диапазона
КомпанияAnalog Devices вносит весомый вклад в развитие 5G в области СВЧ благодаря своим уникальным возможностям в области СВЧ. Наш широкий технологический портфель и постоянное развитие радиочастотных технологий в сочетании с богатой историей в области разработки систем радиосвязи поставили ADI на лидирующую позицию в области разработки новых решений для наших клиентов в микроволновых и миллиметровых диапазонах волн для возникающих систем 5G.
Tesla больше не использует радарные датчики в автомобилях Model 3 и Model Y, построенных в Северной Америке — TechCrunch
АвтомобилиTesla Model Y и Model 3, предназначенные для клиентов из Северной Америки, строятся без радара, что соответствует желанию генерального директора Илона Маска использовать только камеры в сочетании с машинным обучением для поддержки своей продвинутой системы помощи водителю и других функций активной безопасности.
Как и многие другие шаги Tesla, решение прекратить использование датчика противоречит отраслевым стандартам.Пока что автомобили без радаров будут продаваться только в Северной Америке. Tesla не сообщила, когда и может ли она удалить радарный датчик в автомобилях, построенных для китайских и европейских клиентов. Автопроизводители обычно используют комбинацию радара и камер — и даже лидара — для обеспечения чувствительности, необходимой для предоставления расширенных функций системы помощи водителю, таких как адаптивный круиз-контроль, который сопоставляет скорость автомобиля с окружающим движением, а также удержание полосы движения и автоматическое удержание полосы движения. изменения.
Musk рекламировал потенциал своей фирменной системы «Tesla Vision», которая использует только камеры и так называемую обработку нейронной сети для обнаружения и понимания того, что происходит в окружающей среде, окружающей автомобиль, а затем реагирует соответствующим образом.Нейронные сети — это форма машинного обучения, которая работает аналогично тому, как учатся люди. Это сложная форма алгоритма искусственного интеллекта, которая позволяет компьютеру обучаться, используя серию связанных сетей для выявления закономерностей в данных. Многие компании, разрабатывающие технологии самоуправления, используют глубокие нейронные сети для решения конкретных задач. Но они ограждают глубокие сети и используют алгоритмы, основанные на правилах, для связи с более широкой системой.
Когда радар и зрение расходятся, какому из них вы верите? Зрение имеет гораздо большую точность, поэтому лучше удвоить зрение, чем объединять сенсоры.
— Илон Маск (@elonmusk) 10 апреля 2021 г.
Компания подробно описала переход от радара в обновлении на своем веб-сайте, отметив, что переход начался в этом месяце. Этот подход «камера плюс машинное обучение» (в частности, обработка нейронной сети) получил название Tesla Vision и будет использоваться в его стандартной расширенной системе помощи водителю Autopilot, а также в его обновленной функции стоимостью 10 000 долларов, получившей название Full Self-Driving или FSD. Транспортные средства Tesla не являются самоуправляемыми, и для их работы требуется водитель-человек.
АвтомобилиTesla, которые поставляются без радара, изначально будут ограничивать автопилот, включая функцию удержания полосы движения, известную как Autosteer. На короткий период времени автопилот будет ограничен максимальной скоростью 75 миль в час и большей минимальной дистанцией следования. По словам Теслы, функция экстренного ухода за пределы полосы движения и интеллектуальный вызов системы, который позволяет водителю вызывать свой автомобиль на парковке, могут быть отключены при доставке.
Компания планирует восстановить эти функции с помощью обновлений беспроводного программного обеспечения в ближайшие недели.Тесла не привел конкретных сроков. Все остальные доступные функции автопилота и полного самостоятельного вождения будут активны при доставке, в зависимости от конфигурации заказа, сообщила компания.
Между тем, новые автомобили Model S и Model X, а также все модели, созданные для рынков за пределами Северной Америки, будут по-прежнему оснащаться радаром и будут иметь функцию автопилота с поддержкой радара.
«Model 3 и Model Y — наши автомобили большего объема», — отметила Tesla в разделе часто задаваемых вопросов.«Переход к Tesla Vision в первую очередь позволяет нам анализировать большой объем реальных данных за короткий промежуток времени, что в конечном итоге ускоряет развертывание функций на основе Tesla Vision».
[219 страниц] В отчете о рынке радарных датчиков глобальный рынок классифицируется по типу (формирующий и не отображающий изображения), дальности действия (ближний, средний, дальний), применению и географическому расположению. Влияние COVID-19 на индустрию датчиков уровня.
Содержание
1 Введение (стр.- 18)
1.1 Цели исследования
1.2 Определение рынка
1.3 Объем исследования
1.3.1 Охватываемые рынки
1.3.2 Годы исследования
1.4 Валюта
1.5 Размер пакета
1.6 Ограничения
1,7 Заинтересованные стороны
2 Методология исследования (Страница № — 22)
2.1 Данные исследования
2.1.1 Вторичные данные
2.1.1.1 Ключевые данные из вторичных источников
2.1.2 Первичные данные
2.1.2.1 Ключевые данные из первичных источников
2.1.2.2 Ключевые отраслевые выводы
2.1.2.3 Разбивка первичных данных
2.2 Оценка размера рынка
2.2.1 Подход снизу вверх
2.2.1.1 Доходы компаний от радарного датчика Рынок
2.2.1.2 Анализ Asps для радарных датчиков
2.2.1.3 Анализ поставок радарных датчиков
2.2.2 Подход «сверху вниз»
2.2.2.1 Оценка стоимости и объема из вторичных источников
2.2.2.2 Проверка полученных результатов с помощью выручки компаний и первичных источников
2.2.2.3 Сопоставление сегмента I с остальными сегментами по отдельности с помощью модели WaterFall
2.3 Структура рынка и триангуляция данных
2.4 Допущения исследования
3 Краткое содержание (стр. № — 33)
4 Premium Insights (стр.- 38)
4.1 Привлекательные возможности на рынке радарных датчиков в период с 2017 по 2023 год
4.2 Рынок, по типу (20172023)
4.3 Рынок, по диапазону (20172023)
4.4 Рынок, по диапазону (20172023)
4.5 Рынок, по вертикали (20172023)
4,6 Рынок, по приложениям (20172023)
4,7 Рынок, по регионам и приложениям
4,8 Рынок, по географии (20172023)
5 Обзор рынка (Страница № — 44)
5.1 Введение
5.2 типа датчиков
5.2.1 Активные датчики
5.2.2 Пассивные датчики
5.3 Типы радиолокационных систем
5.3.1 Радар с синтезированной апертурой (SAR)
5.3.2 Интерферометрический SAR (INSAR)
5.3.3 От прохода к проходу Coherent SAR
5.3.4 Индикатор наземных движущихся целей (GMTI)
5.3.5 Наземный радар (GPR)
5.4 Динамика рынка
5.4.1 Драйверы
5.4.1.1 Повышенное внимание к безопасности и безопасности в автомобильной промышленности
5.4.1.2 Разблокировка возможностей широкополосной радиочастотной системы 5g и миллиметрового диапазона
5.4.1.3 Возрастающая потребность в системах пограничной безопасности
5.4.2 Ограничения
5.4.2.1 Юридические вопросы, связанные с конкретным приложением, в радар-детекторе
5.4.2.2 Более высокая стоимость обслуживания радарного датчика Установлено в автомобилях
5.4.2.3 Высокая стоимость строительства
5.4.3 Возможности
5.4.3.1 Развивающиеся страны увеличивают свои военные расходы
5.4.3.2 Принятие передовых систем помощи водителю и концепций без водителя в автомобильном секторе
5.4.4 Проблемы
5.4.4.1 Электронное противодействие (электронная война)
6 Отраслевые тенденции (стр. № — 53)
6.1 Введение
6.2 Анализ цепочки создания стоимости
6.3 Ключевые отраслевые тенденции на рынке радарных датчиков
6.4 Стандарты и правила для радарных датчиков
6.5 Начинающие компании и инвестиционный сценарий (2015-2017)
7 Технологии, используемые в радиолокационном датчике (стр.- 58)
7.1 Введение
7.2 Роль основных производственных технологий в радиолокационном датчике
7.2.1 Нитрид галлия (GAN)
7.2.2 Кремний-германий (SIGE)
7.2.3 Дополнительный металлооксидный полупроводник (CMOS)
7.3 Время Доменная рефлектометрия (TDR)
7,4 Сверхширокополосный (UWB)
7,5 Другое
7.5.1 Радиолокационные датчики на основе RF MEMS
7.5.2 Миллиметровые волны
8 основных компонентов, используемых в радаре (стр.- 62)
8.1 Введение
8.2 Передатчик
8.3 Дуплексер
8.4 Антенна
8.5 Приемник
8.6 Видеоусилитель
8.7 Обработка
9 Рынок радарных датчиков, по типу (номер страницы — 64)
9.1 Введение
9.2 Радар формирования изображения (основной тип)
9.2.1 Радар непрерывного действия (CW)
9.2.1.1 Модулированный радар непрерывного действия
9.2.1.2 Немодулированный CW Радар
9.2.2 Импульсный радар
9.2.2.1 Радар MTI
9.2.2.2 Разница между импульсным доплеровским радаром и радаром MTI
9.2.2.3 Доплеровский радар
9.3 Невизуальный радар (вторичный тип)
9.3.1 Датчик скорости
9.3.2 Радарный высотомер
9.3.2.1 Применение радиолокационного высотомера для самолета
9.3.2.2 Применение радиолокационного высотомера в космическом корабле
9.3.2.3 Применение радара-высотомера в военной сфере
9.3.2.4 Применение радара-высотомера в дистанционном зондировании
10 Рынок радарных датчиков, по диапазонам (Страница № 76)
10.1 Введение
10.2 Полосы HF, VHF и HUF
10.2.1 Полосы HF и VHF
10.2.2 Полосы HUF
10,3 L, S, Диапазоны C и X
10.3.1 L-Band
10.3.2 S-Band
10.3.3 C-Band
10.3.4 Диапазон X
10,4 диапазоны Ku, K, Ka, V и W
10.4.1 Диапазон Ku
10.4.2 Диапазон K
10.4.3 Диапазон Ka
10.4.4 Диапазон V
10,4,5 Вт -Бандаж
11 Рынок радарных датчиков, по диапазону (Страница № — 87)
11.1 Введение
11.2 Технические характеристики Industry Wise Range
11.2.1 Автомобильная промышленность
11.2.1.1 Радарный датчик ближнего действия (SRR)
11.2.1.2 Радарный датчик дальнего действия (LRR)
11.2.1.2.1 LRR1 и LRR2
11.2.1.2.2 LRR3
11.2.1.2.3 LRR4
11.2.2 Аэрокосмическая и оборонная промышленность
11.2.2.1 Ближний радиус действия
11.2.2.2 Средний диапазон
11.2.2.3 Дальний диапазон
11.2.3 Другая промышленность
11.3 Параметр дальности, рассматриваемый в рамках исследования
11.3.1 Радарный датчик ближнего действия
11.3.2 Радарный датчик среднего диапазона
11.3.3 Радарный датчик дальнего действия
12 Рынок радарных датчиков, по применению (Страница № — 97)
12.1 Введение
12.2 Автомобильная промышленность
12.2.1 Система предотвращения столкновений
12.2.2 Обнаружение слепых зон
12.2.3 Адаптивный круиз-контроль
12.2.4 Съезд с полосы движения Система предупреждения
12.2.5 Система обнаружения объектов
12.2.6 Функции остановки и движения
12.3 Аэрокосмическая и оборонная промышленность
12.3.1 Наземный
12.3.2 Морской
12.3.3 Воздушный
12.3.4 Космический
12.4 Промышленный
12.4.1 Зона защиты машин
12.4.2 Защита от столкновений
12.4.3 Промышленный робот
12.4.4 Измерение рабочей среды
12.4.5 Инспекция шахт
12.4.6 Осмотр стены туннеля
12.4.7 Расположение подземных труб
12.5 Безопасность и наблюдение
12.5.1 Система контроля доступа
12.5.2 Безопасность по периметру
12.5.3 Транспорт
12.5.4 Коммерческие объекты
12.6 Мониторинг и управление движением
12.6.1 Анализ транспортного потока
12.6.2 Контроль светофора
12.6.3 Классификация трафика
12.6.4 Оборудование для измерения расстояния
12.6.5 Радиолокатор управления воздушным движением (УВД)
12.6.6 Радиолокатор наземного контроля (GTC)
12.7 Мониторинг окружающей среды и погоды
12.7.1 Радиолокационная система наблюдения за погодой
12.7.2 Наблюдение за погодой и планетами
12,8 Другие приложения
12.8.1 Здравоохранение
12.8.2 Сельское хозяйство
12.8.3 Умные электронные устройства
13 Рынок радарных датчиков по вертикали (стр.- 133)
13.1 Введение
13.2 Коммерческий
13.3 Государственный
13.4 Промышленный
14 Географический анализ (Номер страницы — 141)
14.1 Введение
14.2 Северная Америка
14.2.1 США
14.2.2 Канада
14.2.3 Мексика
14.3 Европа
14.3.1 Франция
14.3.2 Великобритания
14,3 .3 Италия
14.3.4 Остальная Европа
14.4 Азиатско-Тихоокеанский регион (APAC)
14.4.1 Китай
14.4.2 Япония
14.4.3 Индия
14.4.4 Южная Корея
14.4.5 Остальная часть APAC
14,5 Остальной мир (RoW)
14.5.1 Южная Америка
14.5.2 Ближний Восток и Африка
15 Конкурентная среда (Страница № — 161)
15.1 Обзор
15.2 Ключевые игроки на рынке радарных датчиков
15.3 Отображение конкурентного лидерства
15.3.1 Дальновидные лидеры
15.3.2 Динамические отличия
15.3.3 Новаторы
15.3.4 Развивающиеся компании
15.4 Конкурентный сравнительный анализ
15.4.1 Превосходство бизнес-стратегии (25 компаний)
15.4.2 Сила портфеля продуктов (25 компаний)
* Наверх В рамках данного исследования были проанализированы 25 компаний: Robert Bosch GmbH (Германия), Continental AG (Германия), Infineon Technologies AG (Германия), Hella KGaA Hueck & Co.(Германия), Autoliv Inc. (Сведан), Smart Microwave Sensors GmbH (Германия), Delphi Automotive LLP (Великобритания), Lockheed Martin Corporation (США), Denso Corporation (Япония), NXP Semiconductors NV (Нидерланды), Arbe Robotics ( Израиль), Gryphon Sensors (США), Omniradar BV (Нидерланды), Echodyne, Inc. (США), Oculli Corporation (США), Airbus Group (Нидерланды), Saab AB (Сведан), BAE Systems (Великобритания), Vega Americas Inc. (США), Terma A / S (Дания), Selex ES (США), Brigade Electronics PLC (Великобритания), Northrop Grumman Corporation (США), Senz2 BV (Нидерланды), ZF Friedrichshafen AG (Германия)
15 .5 Ситуации и тенденции конкуренции
16 Профили компании: Рынок радарных датчиков (Страница № — 170)
(Обзор бизнеса, Предлагаемые продукты, Система показателей предложения продуктов, Карта показателей бизнес-стратегии, последние разработки, ключевые взаимоотношения) *
16,1 Введение
16,2 Robert Bosch GmbH
16,3 Continental AG
16,4 Denso Corporation
16,5 Delphi Automotive LLP
16,6 Hella KGaA Hueck & Co
16,7 Infineon Technologies AG
16.8 Autoliv Inc.
16.9 Lockheed Martin Corporation
16.10 NXP Semiconductors NV
16.11 Smart Microwave Sensors GmbH
16.12 Start-Up Ecosystem
16.12.1 Oculli Corporation
16.12.2 Gryphon Sensors
16.12.3 Arbe Robotics
16.12.4 Echodyne, Inc.
16.12.5 Omniradar BV
* Подробная информация об обзоре бизнеса, предлагаемых продуктах, оценочной карте предложения продуктов, оценочной карте бизнес-стратегии, последних разработках, ключевых взаимоотношениях не может быть зафиксирована в случае компаний, не котирующихся на бирже.
17 Приложение (номер страницы — 208)
17.1 Аналитика отраслевых экспертов
17.2 Руководство для обсуждения
17.3 Хранилище знаний: портал подписки Marketsandmarkets
17.4 Введение в RT: анализ рынка в реальном времени
17.5 Доступные настройки
17.6 Связанные отчеты
17.7 Сведения об авторе
Список таблиц (68 таблиц)
Таблица 1 Незаконность радарных датчиков в некоторых странах, ограничивающих рынок радарных датчиков
Таблица 2 Нормативы и стандарты, касающиеся радарных датчиков
Таблица 3 Характеристики частот автомобильных радаров в зависимости от региона и страны
Таблица 4 Рынок радарных датчиков, по типам, 20142023 ( В миллионах долларов США)
Таблица 5 Рынок по типам изображений, 2014-2023 гг. (В миллионах долларов США)
Таблица 6 Рынки изображений по приложениям, 2014-2023 гг. (В миллионах долларов США)
Таблица 7 Рынки по типам, не связанным с изображениями, 2014-2023 гг. (В миллионах долларов США)
Таблица 8 Рынок без визуализации, по приложениям, 2014-2023 (млн долларов США)
Таблица 9 Рынок по диапазонам, 2014-2023 (миллион долларов США)
Таблица 10 Список диапазонов частот радара
Таблица 11 Рынок диапазонов HF, VHF и HUF, по приложениям, 20142023 (в миллионах долларов США)
Таблица 12 Рынок диапазонов L, S, C и X, по приложениям, 2014 2023 (в миллионах долларов США)
Таблица 13 Рынок диапазонов Ku, K, Ka, V и W, по приложениям, 2014-2023 ( В миллионах долларов США)
Таблица 14 Дальность действия радара для автомобилей A приложения
Таблица 15 Классификация дальности действия радиолокационных датчиков в автомобильном секторе
Таблица 16 Рынок, по дальности, 2014-2023 гг. (млн долларов США)
Таблица 17 Рынок радарных датчиков ближнего действия, по применению, 2014-2023 гг. (млн долларов США)
Таблица 18 Рынок среднего диапазона, По приложениям, 2014-2023 (в миллионах долларов США)
Таблица 19 Дальний рынок, по приложениям, 2014-2023 (в миллионах долларов США)
Таблица 20 Рынки по приложениям, 2014-2023 (в миллионах долларов США)
Таблица 21 Рынок автомобильных приложений, по стоимости и объему, 20142023
Таблица 22 Рынок автомобильных приложений, по типам, 20142023 (млрд долларов США)
Таблица 23 Рынок автомобильных приложений, по диапазонам, 20142023 (млн долларов США)
Таблица 24 Рынок автомобильных приложений, по диапазонам, 20142023 (млн долларов США)
Таблица 25 Рынок автомобильных приложений, по регионам, 2014-2023 гг. (Млн долларов США)
Таблица 26 Рынок приложений для аэрокосмической и оборонной промышленности, по стоимости и объему, 2014-2023 гг.
Таблица 27 Рынок, по приложениям для аэрокосмической и оборонной промышленности, 2014-2023 (Млн долларов США)
Таблица 28 Рынок приложений для аэрокосмической и оборонной промышленности, по типам, 2014-2023 гг. (Млн долларов США)
Таблица 29 Рынок приложений для аэрокосмической и оборонной промышленности, по диапазонам, 2014-2023 гг. (Млн долларов США)
Таблица 30 Рынок приложений для аэрокосмической и оборонной промышленности, По диапазону, 2014-2023 гг. (Млн долларов США)
Таблица 31 Рынок приложений для аэрокосмической и оборонной промышленности, по регионам, 2014-2023 гг. (Млн долларов США)
Таблица 32 Рынок промышленных приложений, по типам, 2014-2023 гг. (Млн долларов США)
Таблица 33 Рынок промышленных приложений, По диапазонам, 2014 г. 2023 г. (млн долларов США)
Таблица 34 Рынок промышленных приложений, по диапазону, 2014 г. 2023 г. (млн долларов США)
Таблица 35 Рынок приложений безопасности и наблюдения, по типам, 2014 г. 2023 г. (млн долларов США)
Таблица 36 Рынок приложений безопасности и наблюдения Приложения, по диапазонам, 2014-2023 гг. (В миллионах долларов США)
Таблица 37 Рынок приложений безопасности и наблюдения, по диапазонам, 2014-2023 гг. (В миллионах долларов США)
Таблица 38 Рынок приложений безопасности и наблюдения, по регионам, 2014-2023 гг. (США D, млн)
Таблица 39 Рынок приложений для мониторинга и управления трафиком, по типам, 2014-2023 гг. (В млн долларов США)
Таблица 40 Рынок приложений для мониторинга и управления трафиком, по диапазонам, 2014-2023 гг. (В млн долларов США)
Таблица 41 Рынок приложений для мониторинга и управления трафиком Приложение, по диапазону, 2014-2023 гг. (В миллионах долларов США)
Таблица 42 Рынок приложений для мониторинга и управления дорожным движением, по регионам, 2014-2023 гг. (В миллионах долларов США)
Таблица 43 Рынки приложений для мониторинга окружающей среды и погоды, по типам, 2014-2023 гг. (В миллионах долларов США)
Таблица 44 Рынок приложений для мониторинга окружающей среды и погоды, по диапазонам, 2014-2023 гг. (Млн долларов США)
Таблица 45 Рынок приложений мониторинга окружающей среды и погоды, по диапазонам, 2014-2023 гг. (Млн долларов США)
Таблица 46 Рынок приложений мониторинга окружающей среды и погоды, по регионам, 20142023 (млн долларов США)
Таблица 47 Рынок других приложений, по типу, 20142023 (млн долларов США)
Таблица 48 Рынок других приложений, по диапазонам, 20142023 (доллары США) В миллионах)
Таблица 49 Рынок для других приложений, по диапазону, 2014-2023 гг. (Млн долларов США)
Таблица 50 Рынок для других приложений, по регионам, 2014-2023 гг. (В миллионах долларов США)
Таблица 51 Рынок по вертикали, 2014-2023 гг. (Млн. Долларов США)
Таблица 52 Рынок коммерческих вертикалей, по регионам, 2014-2023 гг. (Млн. Долл. США)
Таблица 53 Рынок государственных вертикалей, по регионам, 2014-2023 гг. (Млн. Долл. США)
Таблица 54 Рынки промышленных вертикалей, по регионам, 2014-2023 гг. (Млн. Долл. США)
Таблица 55 Рынок, По регионам, 2014-2023 гг. (В миллионах долларов США)
Таблица 56 Рынок в Северной Америке, по странам, 2014-2023 гг. (В миллионах долларов США)
Таблица 57 Рынки в Северной Америке, по приложениям, 2014-2023 гг. (В миллионах долларов США)
Таблица 58 Рынки в Северной Америке, по вертикали , 20142023 (млн долларов США)
Таблица 59 Рынок в Европе, по странам, 20142023 (млн долларов США)
Таблица 60 Рынок в Европе, по приложениям, 20142023 (млн долларов США)
Таблица 61 Рынок в Европе, по вертикали, 20142023 (млн долларов США) )
Таблица 62 Рынок в Азиатско-Тихоокеанском регионе, по Страна, 2014-2023 гг. (В миллионах долларов США)
Таблица 63 Рынок в Азиатско-Тихоокеанском регионе, по приложениям, 2014-2023 гг. (В миллионах долларов США)
Таблица 64 Рынки в Азиатско-Тихоокеанском регионе, по вертикали, 2014-2023 гг. (В миллионах долларов США)
Таблица 65 Рынки в странах Азиатско-Тихоокеанского региона, 2014-2023 гг. (В миллионах долларов США)
Таблица 66 Рынок в полосе отвода, по приложениям, 2014 г. 2023 г. (млн долларов США)
Таблица 67 Рынок полосы отвода, по вертикали, 2014 г. 2023 г. (млн долл. США)
Таблица 68 Топ-5 игроков на рынке радиолокационных датчиков, 2016 г.
Список рисунков (86 рисунков)
Рисунок 1 Рынки, покрытые рынком радарных датчиков
Рисунок 2 Поток исследований
Рисунок 3 Рынок радарных датчиков: дизайн исследования
Рисунок 4 Триангуляция данных
Рисунок 5 Снимок рынка радарных датчиков (2014-2023)
Рисунок 6 Оценка рынка радарных датчиков без визуализации будут расти самыми высокими темпами в период с 2017 по 2023 год
Рисунок 7 Диапазоны Ku, K, Ka, V и W занимали самую большую долю на общем рынке в 2016 году
Рисунок 8 Рынок радарных датчиков среднего радиуса действия, как ожидается, будет расти самым высоким Рейтинг в период с 2017 по 2023 год
Рисунок 9 Предполагается, что автомобильное приложение будет занимать наибольший размер рынка в период с 2017 по 2023 год
Рисунок 10 Северная Америка лидировала на рынке в 2016 году
Рисунок 11 Повышенное внимание к безопасности и защите потребностей в автомобильной промышленности будет связано с Рост рынка в течение прогнозного периода
Рис. 12 Неизображающие радарные датчики, которые, как ожидается, будут занимать наибольший объем рынка в период с 2017 по 2023 год
Рис. 13 Ku, K, Ka, V и W Полосы, которые, вероятно, будут доминировать на рынке в период с 2017 по 2023 год
Рисунок 14 Датчики радара ближнего действия, которые, по оценкам, будут занимать наибольший рынок в течение периода прогноза
Рисунок 15 Государственный сектор занял наибольшую долю рынка по вертикали в 2016 году
Рисунок 16 Применение в автомобильной промышленности удерживать основную долю рынка, по заявкам (20172023)
Рисунок 17 Северная Америка, как ожидается, займет самую большую долю рынка в 2016 году
Рисунок 18 США, как ожидается, сохранят самую большую долю рынка в 2016 году
Рисунок 19 Движущие факторы, ограничения , Возможности и проблемы для рынка радарных датчиков
Рисунок 20 Глобальные военные расходы, 2000-2016 гг.
Рисунок 21 Военные расходы в регионе Азии и Океании
Рисунок 22 Возможные автомобильные применения радарного датчика
Рисунок 23 Анализ цепочки создания стоимости рынка радарных датчиков
Рисунок 24 Внедрение интеллектуальных радаров: ведущая тенденция среди ключевых игроков рынка
Рисунок 25 Привлечение последних инвестиций B y Старт-ап
Рис. 26 Основные производственные технологии и принцип работы, задействованные на рынке радарных датчиков
Рис. 27 Структурная схема радиолокационной системы
Рис. 28 Рынок радарных датчиков, по типу
Рис. 29 Рынок радаров непрерывного действия, как ожидается, будет расти максимально Скорость между 2017 и 2023 годами
Рисунок 30 Приложение для мониторинга окружающей среды и погоды, которое, как ожидается, будет занимать основную долю на рынке изображений, 2017
Рисунок 31 Блок-схема радара непрерывного действия
Рисунок 32 Блок-схема импульсного радара
Рисунок 33 Блок-схема радара MTI
Рисунок 34 Блок-схема импульсного доплеровского радара
Рисунок 35 Применение в автомобильной промышленности, вероятно, будет расти с максимальной скоростью в период с 2017 по 2023 год
Рисунок 36 Рынок диапазонов Ku, K, Ka, V и W, как ожидается, будет расти с максимальной скоростью в течение периода прогноза
Рис. 37. Ожидается, что приложение для мониторинга окружающей среды и погоды займет основную долю на рынке диапазонов HF, VHF и HUF (2017–2023 гг.) 90 823 Рис. 38. Приложение для обеспечения безопасности и наблюдения, вероятно, будет расти самыми высокими темпами на рынке для диапазонов L, S, C и X (2017–2023 гг.)
Рис. 39 Рынок автомобильных приложений, вероятно, будет расти самыми высокими темпами для Ku, K, Ka, Диапазоны V и W между 2017 и 2023 годами
Рисунок 40 Предпочтение радара перед другими технологиями дистанционного зондирования
Рисунок 41 Датчики радара дальнего действия, вероятно, будут доминировать на общем рынке (2016)
Рисунок 42 Автомобильные приложения, как ожидается, будут занимать наибольший размер рынка в отношении Датчик радара ближнего действия (20172023)
Рис. 43 Рынок радарных датчиков среднего радиуса действия для автомобильной промышленности, как ожидается, будет занимать наибольшую долю в период с 2017 по 2023 год
Рисунок 44 Приложение для мониторинга окружающей среды и погоды, как ожидается, займет наибольшую долю рынка дальнего действия (2017–2023 годы)
Рисунок 45 Рынок радарных датчиков, по приложениям (20172023)
Рисунок 46 Приложения радарных датчиков в автомобильной промышленности
Рисунок 47 Рынок диапазонов Ku, K, Ka, V и W для автомобилей Ожидается, что количество приложений будет расти самыми высокими темпами в течение прогнозного периода
Рис. 48 Ожидается, что в Азиатско-Тихоокеанском регионе будет наибольший объем рынка для автомобильной промышленности к 2023 году
Рис. Оборонное приложение в 2016 г.
Рисунок 50 Ожидается, что диапазоны L, S, C и X будут занимать наибольший размер рынка для приложений аэрокосмической и оборонной промышленности в течение 2017 г. 2023 г.
Рис. 51 Северная Америка занимала наибольшую долю рынка приложений для аэрокосмической и оборонной промышленности в 2016 г.
Рис. 52 Неизображающие радарные датчики, которые, как ожидается, будут доминировать на рынке для промышленного применения в период с 2017 по 2023 год
Рис. 53 Радиолокационные датчики среднего радиуса действия занимали наибольшую долю рынка для промышленного применения в 2016 году
Рис. 54 Ku, K, Ka, V, и W-диапазоны, как ожидается, будут доминировать на рынке приложений безопасности и наблюдения в период с 2017 по 2023 год
Рисунок 55 Северная Америка будет лидировать на рынке приложений безопасности и наблюдения Применение в течение периода прогноза
Рис. 56 Рынок диапазонов L, S, C и X, на которые к 2023 году будет приходиться основная доля рынка приложений для мониторинга и управления трафиком
Рис. 57 Северная Америка доминирует на рынке приложений для мониторинга и управления трафиком в 2016
Рис. 58 Рынок радиолокационных датчиков для приложений мониторинга окружающей среды и погоды, который, как ожидается, будет расти самыми высокими темпами в течение прогнозного периода
Рис. 59 Радиолокационные датчики дальнего действия доминировали на рынке приложений для мониторинга окружающей среды и погоды в 2016 году
Рис. 60 Рынок Азиатско-Тихоокеанского региона для Приложение для мониторинга окружающей среды и погоды, как ожидается, будет расти самыми высокими темпами в течение прогнозного периода
Рисунок 61 Ожидается, что диапазоны L, S, C и X будут занимать наибольший размер общего рынка для других приложений в период с 2017 по 2023 год
Рисунок 62 Рынок для Другие приложения в Азиатско-Тихоокеанском регионе, по оценкам, будут расти самыми высокими темпами в период с 2017 по 2023 год
Рис. 63 Правительственная вертикаль для Ожидается, что наибольший рынок радарных датчиков будет занимать в период с 2017 по 2023 год
Рисунок 64 Рынок коммерческой вертикали в Азиатско-Тихоокеанском регионе, как ожидается, будет расти самыми быстрыми темпами в период с 2017 по 2023 год
Рисунок 65 В государственной вертикали, Северная Америка, как ожидается, будет удерживать основную долю в радиолокационных датчиках в 2017 г.
Рисунок 66 В промышленной вертикали Азиатско-Тихоокеанский регион занимает наибольшую долю на рынке в 2017 г. Самый высокий показатель в период с 2017 по 2023 год
Рисунок 70 Европа: Обзор рынка
Рисунок 71 Государственная вертикаль занимала наибольшую долю на европейском рынке в 2016 году
Рисунок 72 Азиатско-Тихоокеанский регион: Обзор рынка радарных датчиков
Рисунок 73 Ожидается, что автомобильная промышленность займет самый большой размер рынка в Азиатско-Тихоокеанском регионе в период с 2017 по 2023 год
Рис. 74 RoW: Обзор рынка радарных датчиков
Рис. Ключевая стратегия роста в период с 2014 по 2017 год
Рисунок 76 Структура развития рынка Разработка нового продукта как основная стратегия, принятая ключевыми игроками
Рисунок 77 Битва за долю на рынке: запуск нового продукта и разработки были ключевой стратегией, принятой в течение 2014-2017 годов
Рисунок 78 Роберт Бош GmbH: Снимок компании
Рисунок 79 Continental AG: Снимок компании
Рисунок 80 Denso Corporation: Снимок компании
Рисунок 81 Delphi Automotive LLP: Снимок компании
Рисунок 82 Hella KGaA Hueck & Co: Снимок компании
Рисунок 83 Infineon Technologies AG: Снимок компании
Рисунок 84 Autoliv Inc.: Снимок компании
Рисунок 85 Lockheed Martin Corporation: Снимок компании
Рисунок 86 NXP Semiconductors N.V .: Снимок компании
Онлайн-панель: вывод автомобильных радарных датчиков на новый уровень
Онлайн-панель серии
Заголовок: Онлайн-панель: Вывод автомобильных радарных датчиков на новый уровень
Дата: 29.06.2021
Время: 8:00 PT / 11:00 ET
Спонсоры: GLOBALFOUNDRIES, Arbe Israel, Uhnder, Rohde & Schwarz и Tektronix
Эта группа экспертов по устройствам и тестированию / измерениям обсудит современное состояние автомобильных радарных датчиков для ADAS, автономность и внутреннее зондирование для различных функций, добавляемых в будущие автомобили.Производители устройств обсудят последние инновации для создания высокоинтегрированных недорогих сенсорных чипов 4D, а компании, занимающиеся тестированием / измерением, будут решать проблемы тестирования высокочастотных широкополосных устройств на предмет проверки и надежности.
Модератор : Асиф Анвар , директор, Strategy Analytics
Панелист : Д-р Фарзад Инанлу , технический директор, радарные и мм-волновые системы, автомобильное, промышленное и многорынное бизнес-подразделение, GLOBAL15
RIES
RIES Эксперт : Др.Ноам Аркинд , соучредитель и технический директор, Arbe Israel
Эксперт : Кертис Дэвис , технический директор и соучредитель, Uhnder, Inc.
Эксперт : Хольгер Гриска, ответственный за сегмент рынка ADAS Sensor Test, Rohde & Schwarz
Эксперт : Алекс Крауска , главный инженер по радиочастотным решениям, Tektronix
Биографические данные участников панели:
Модератор — стратегическая аналитика
Асиф Анвар Аналитика
Асиф Анвар — опытный аналитик компании Strategy Analytics с более чем 20-летним стажем, перешедший в группу Global Automotive Practice в 2019 году.В настоящее время его внимание в Strategy Analytics направлено на поддержку автомобильной промышленности посредством предоставления услуг Powertrain, Body, Safety & Chassis (PBCS) в Strategy Analytics, обеспечение интеллектуального лидерства и анализа на уровне системы, полупроводников и датчиков, а также рассмотрение более широкая цепочка создания стоимости и отслеживание появляющихся возможностей.
Имея карьеру, охватывающую как инженерные, так и маркетинговые роли в металлургической, минеральной и электронной отраслях, Асиф более 20 лет обеспечивает понимание и анализ рынков передовой электроники, охватывая беспроводные сети, волоконно-оптические сети, связь миллиметрового диапазона и т. Д. радары, РЭБ и оптоэлектронные приложения.После почти двух десятилетий погружения в эту область Асиф стал признанным экспертом и идейным лидером в индустрии сложных полупроводников.
Являясь членом IEEE (включая AESS, MTTS и ComSoc), а также IChemE, Асиф окончил Университет Тиссайда, Великобритания, в 1993 году со степенью бакалавра с отличием в области химического машиностроения, а затем провел докторское исследование по жирные кислоты.
GLOBALFOUNDRIES
Д-р Фарзад Инанлоу, технический директор, радиолокационные и мм-волновые системы, автомобильное, промышленное и межрыночное бизнес-подразделение
Фарзад М.Д. Инанлоу — технический директор по радиолокационным и миллиметровым системам в стратегическом бизнес-подразделении Global Foundries AIM (автомобильная промышленность, промышленность и рынки сбыта). Фарзад пришел в GF из PARC (Исследовательский центр Пало-Альто), где он руководил группой инженеров и физиков, работающих над радиолокаторами миллиметрового диапазона и совместными радиолокационными целями с частотно-избирательными поверхностями, посредством концепции, дизайна и реализации.
До PARC Фарзад работал в Лаборатории реактивного движения НАСА, где он был руководителем разработки и разработки технологий радиолокационных, микроволновых и миллиметровых волн и главным исследователем передовых концепций радиолокаторов.В JPL Фарзад руководил проектированием нескольких радиолокационных подсистем в нескольких проектах, включая флагманскую миссию NISAR, проект малой спутниковой фазированной антенной решетки с тремя диапазонами (W, Ku, Ka) и концепцию планетарного посадочного радара 94 ГГц с 2014 по 2018. Фарзад также занимал должности в Qualcomm и Boston Scientific.
Доктор Инанлоу получил докторскую степень в Технологическом институте Джорджии, где его диссертация была посвящена разработке инновационных приемопередатчиков RF / mmW как на уровне системы, так и на уровне MMIC для продвинутых автономных приложений с низким энергопотреблением.Находясь там, он был научным сотрудником президента и научным сотрудником NSF, а также в течение года работал главным лектором по курсу «Схемы и электроника». Фарзад опубликовал множество исследовательских статей в реферируемых высокоэффективных журналах, представил статьи на международных конференциях и семинарах, а также является рецензентом ряда крупных журналов.
Arbe Israel
Доктор Ноам Аркинд, соучредитель и технический директор
Ноам имеет более 10 лет опыта в области исследований и разработок и имеет докторскую степень.Доктор прикладной математики из лаборатории робототехники Научного института Вейцмана. До Arbe Ноам руководил разработкой алгоритмов в Taptica и системы управления SpaceIL.
В Arbe Ноам и его команда возглавляют революцию в области радаров, создав беспрецедентную технологию радаров для получения изображений с высоким разрешением 4D. Вместе команда стремится к тому, чтобы избежать несчастных случаев на дорогах, создавая по-настоящему безопасные системы помощи водителю, прокладывая путь к полностью автономному вождению в будущем.
Uhnder
Кертис Дэвис, технический директор и соучредитель
Кертис Дэвис — технический директор и соучредитель Uhnder, Inc., где он руководит разработкой инноваций в области цифровых радаров для усовершенствования систем безопасности для мобильных приложений следующего поколения, таких как ADAS, автоматизированные средства доставки последней мили, автономные грузовые перевозки и автоматизация морских портов.
В качестве соучредителя Кертис сыграл важную роль в определении стратегии Ундера по объединению цифровой кодированной модуляции (DCM), технологии комплементарных металл-оксид-полупроводник (CMOS) и передовых методов цифровой обработки, чтобы дать компании значительное преимущество перед аналоговыми радарными датчиками.Сегодня прорывные датчики Uhnder устойчивы к самоинтерференции или перекрестным помехам от других радаров, обеспечивают непревзойденное угловое разрешение в большом поле зрения (FOV) и обеспечивают высокое контрастное разрешение (HCR) для определения соседних объектов, ранее не обнаруживаемых обычными аналоговыми радарами. датчики.
До основания Uhnder в 2015 году Дэвис стал соучредителем нескольких других успешных технологических предприятий, включая MulticoreWare, компанию по интеграции программного обеспечения и систем, предоставляющую гетерогенные многоядерные (h-многоядерные) решения; AGEIA Technologies, приобретенная NVIDIA в 2008 году и ставшая физическим движком PhysX в реальном времени для программного пакета Nvidia GameWorks; и Celox Networks, где он разработал передовой в отрасли маршрутизатор, способный доставлять приложения с высокой пропускной способностью с QoS.
Дэвис получил степень бакалавра наук и магистра наук в области электротехники в Университете штата Вашингтон.
Rohde & Schwarz
Хольгер Гриска, менеджер сегмента автомобильного рынка, ответственный за тестирование датчиков ADAS
С 2019 года Хольгер Гриска является менеджером сегмента автомобильного рынка, ответственным за тестирование датчиков ADAS в компании Rohde & Schwarz. До этого он имел более чем 20-летний опыт работы в полупроводниковой промышленности, работая со сложными ИС для автомобильных приложений, особенно с продвинутой системой помощи водителю, на различных должностях, таких как управление продуктами, маркетинг, развитие бизнеса, определение и внедрение продукта.На своей нынешней должности Хольгер управляет решениями Rohde & Schwarz, которые помогают клиентам решать их задачи тестирования и измерения на пути к автономному вождению.
Tektronix
Алекс Крауска, главный инженер по ВЧ решениям
Алекс Крауска — главный инженер по ВЧ решениям в Tektronix. Он отвечает за разработку радиочастотных решений для автомобильных коммуникаций и приложений Мил-Губернатора и работает в Tektronix 8 лет. Он имеет 40-летний общий опыт работы в научных приложениях, радарах, радиоэлектронной борьбе, испытательных и измерительных системах и проектировании схем.
Обратите внимание:
После регистрации на этот веб-семинар Microwave Journal®, ведущий и спонсор могут использовать данные вашего профиля для связи с вами по электронной почте.