Регулятор постоянных оборотов Р-2 серии 04 для самолета ЯК-52
Руководство по летной эксплуатации самолета Як-52
Регулятор постоянных оборотов Р-2 сер. 04 винта (Рис. 19) представляет собой агрегат, предназначенный для автоматического управления гидравлическим воздушным винтом.
Регулятор Р-2 сер. 04 предназначен для эксплуатации на двигателе М-14П с винтом В530ТА-Д35 и обеспечивает:
- автоматическое поддержание заданной частоты вращения винта за счет изменения шага винта;
- принудительное изменение заданной частоты вращения винта в рабочем диапазоне от 900 до 1940 об/мин.
Рис. 19 Регулятор Р-2 сер. 04
Основные технические данные
| Тип | Р-2 сер. 04 |
| Привод | От двигателя |
| Направление вращения | Правое, если смотреть на привод регулятора |
| Передаточное отношение от коленчатого вала двигателя к приводу регулятора | 1,045 |
| Частота вращения ведущего вала регулятора, при которой обеспечивается устойчивая работа двигателя | 1400-3085 об/мин (при этом обороты двигателя составляют 1340-2950 об/мин) |
| Принцип действия | Центробежно-гидравлический |
| Схема работы | Односторонняя прямая |
| Рабочая жидкость | Масло МС-20 ГОСТ 21743-76 из нагнетающей магистрали двигателя |
| Давление масла на входе в насос регулятора: | |
| 3-4,5 кгс/см» |
| Не менее 1 кгс/см |
| Максимальное давление на выходе из регулятора при n = 2500 об/мин, отсутствии расхода и температуре масла 85-90 °С | (15±1) кгс/см2 |
| Температура масла на входе в регулятор: | |
| 40 °С |
| 50-65 °С |
| 90 °С |
| Максимальная температура на выходе из регулятора | 100 °С |
Утечка масла через зазоры при п = 2500 об/мин, отсутствии расхода и температуре 85. ..90 °С: ..90 °С: | |
| Не более 1, |
Регулятор частоты вращения ГТД
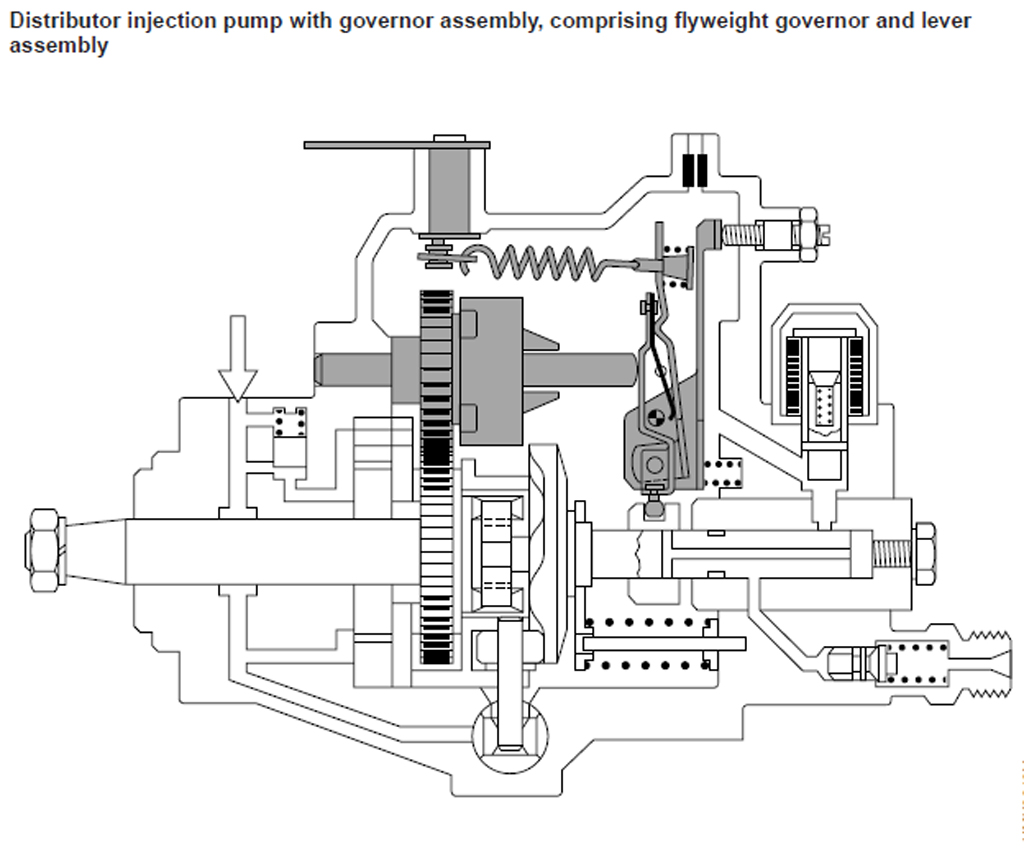
Регулятор частоты вращения работает следующим образом. При увеличении частоты вращения возрастает центробежная сила на грузиках 1 датчика, при этом они расходятся, преодолевая
затяжку пружин 2 и 3 центробежного регулятора и открывая проходное сечение маятника 7. Происходит уменьшение давления в управляющей полости 13 и дозирующая игла 12 перемещается в сторону закрытия проходного сечения, снижая расход топлива и восстанавливая заданную частоту вращения. Статическая приставка с дроссельным пакетом 8 служит для создания изодромного эффекта. При резких возмущениях поршень 11 статической приставки перемещается, вытесняя рабочую жидкость в бесштоковую полость дозирующей иглы и тем самым увеличивал ее скорость. По мере приближения к равновесному режиму поршень статической приставки под действием пружин смещается в нейтральное положение, снижал скорость дозирующей иглы.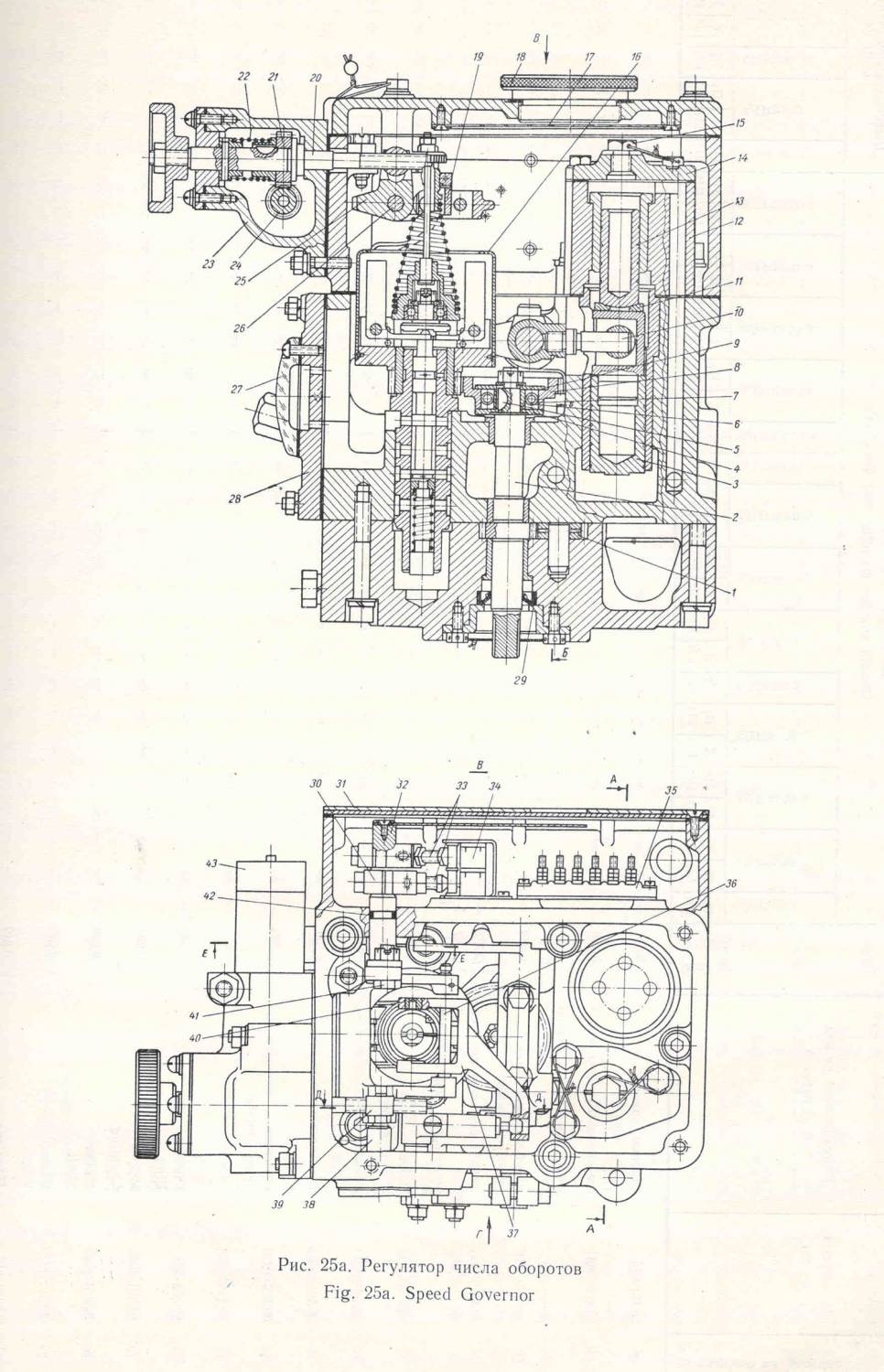
Заданная частота вращения определяется положением РУД, который через кулачок и рычаг обеспечивает требуемое усилие на пружине регулятора. Для настройки используется также регулировочный винт. Пакет биметаллических пластин 4 компенсирует влияние температуры топлива на изменение частоты вращения. Здесь и далее рпит — давление питания регуляторов.
Распределитель топлива. Функции распределения топлива по коллекторам или секторам форсунок в камерах сгорания выполняют распределители топлива или распределительные клапаны. К нижнему торцу золотника 1 распределителя подводится топливо от дозирующего крана, а пружинная полость соединена со сливом. При увеличении давления на входе в распределитель топлива золотник, преодолевал силу затяжки пружины, перемещается вверх, открывал во втулке профилированные окна подвода топлива к коллекторам. Запорные клапаны 2 и 3 предназначены для предотвращения утечек топлива на неработающем двигателе.
В настоящее время в связи с внедрением в практику управления ГТД электронных систем управления гидромеханическая часть системы значительно упрощается. Основными функциями становятся питание топливом двигателя и его силовых исполнительных механизмов, исполнение команд электронного регулятора, который осуществляет наиболее сложные функции управления, а также управление двигателем при отказе электронного регулятора.
Применение пневматических струйных регуляторов в ГТД связано, главным образом, с необходимостью обеспечения надежности в эксплуатации при высокой температуре рабочей среды, действии на систему управления вибраций, электромагнитных и радиационных излучений и других сильных внешних воздействий.
Читать всё о газотурбинном двигателе
Avia.pro
Регулятор числа оборотов | Ремонт тракторов и спецтехники
Для чего нужен и как работает регулятор числа оборотов?
Регуляторы поддерживают заданное число оборотов коленчатого вала при различных нагрузках двигателя. При повышении нагрузки регулятор автоматически, без участия тракториста, перемещает рейку топливного насоса, увеличивая подачу топлива. При снижении нагрузки регулятор, воздействуя на рейку топливного насоса в обратном направлении, уменьшает подачу топлива.
При повышении нагрузки регулятор автоматически, без участия тракториста, перемещает рейку топливного насоса, увеличивая подачу топлива. При снижении нагрузки регулятор, воздействуя на рейку топливного насоса в обратном направлении, уменьшает подачу топлива.
На современных тракторах применяют механические центробежные регуляторы, которые при изменении нагрузки двигателя от полной до холостого хода допускают изменение числа оборотов коленчатого вала не более 10%.
Все дизельные тракторы оборудованы всережимными регуляторами, которые поддерживают любое число оборотов коленчатого вала в диапазоне от минимального устойчивого (400—500 в мин) до номинального для данного двигателя.
Требуемое число оборотов устанавливают изменением положения рычага управления регулятором.
Как устроен регулятор числа оборотов, устанавливаемый на топливном насосе ТН-8,5ХЮ?
Регулятор размещен в картере, привернутом к картеру топливного насоса (рис. ). Валик регулятора получает вращение от кулачкового вала топливного насоса через пару шестерен.
В кольцевую канавку муфты входят два штифта вильчатого рычага, качающегося на оси, закрепленной в кронштейне. Этот кронштейн может поворачиваться на нижнем поперечном валике, с которым он связан поводком*и двойной пружиной. Вильчатый рычаг тягой соединен с рейкой топливного насоса. Нижний поперечный валик
имеет на конце, выходящем из корпуса регулятора, закрепленный наружный рычаг. Через систему тяг наружный рычаг регулятора связан с установленным в кабине тракториста рычагом управления.
С увеличением числа оборотов возрастает центро-бежная сила грузов, которые расходятся и перемещают скользящую муфту и вильчатый рычаг.
При уменьшении числа оборотов уменьшается цент-робежная сила, пружины перемещают скользящую муфту вправо. Вместе с муфтой перемещается вильчатый рычаг, который поворачивается вокруг оси на кронштейне.
Так как кронштейн остается неподвижным, вместе с верхней частью вильчатого рычага рейка перемещается вправо, увеличивая подачу топлива и повышая число оборотов тракторного двигателя.
 Когда рычаг управления поворачивается на некоторый угол от крайнего левого положения, вместе с ним поворачивается и кронштейн, перемещая нижнюю часть вильчатого рычага.
Когда рычаг управления поворачивается на некоторый угол от крайнего левого положения, вместе с ним поворачивается и кронштейн, перемещая нижнюю часть вильчатого рычага.Подборка схем регулятора оборотов двигателя постоянного тока
Производить регулировку скорости вращения вала коллекторного электродвигателя, имеющего малую мощность, можно подсоединяя последовательно в электроцепь его питания резистор. Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения.
Основное, что этот способ временами приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор оборотов электродвигателя постоянного тока, описанные в данной статье, не имеют эти недостатки. Данные схемы можно с успехом применять и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.
Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.
ШИМ: 0%-99%, напряжение: 5…16 В, ток: 10A….
Регулятор оборотов коллекторного двигателя
Мощность: 400 Вт, обороты: 90-1400 об/мин, 220В/50Гц…
Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).
Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.
Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.
Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:
Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
Радиоаматор, 4/2008
| Корпус регулятора в сборе | 03-17с2 | 1 | |
| Кольцо замковое | 17-090А | 1 | |
| Тяга регулятора в сборе | 17-с13-1Б | 1 | |
| Валик регулятора с крестовиной в сборе | 17-с3-3 | 1 | |
| Сальник корпуса регулятора в сборе | 17-с4 | 1 | |
| Вилка тяги регулятора в сборе | 17-с5Д | 1 | |
| Втулка пружины в сборе | 17-с6-1А | 1 | |
| Муфта регулятора со втулкой в сборе | 17-с8-2 | 1 | |
| Регулятор в сборе | 41-А17с1 | 1 | |
| Груз регулятора в сборе | 41-А17с11 | 1 | |
| Валик регулятора в сборе | 41-А17с9-Г | 1 | |
| 1 | Гайка валика регулятора | 17-039-1 | 1 |
| 2 | Шайба валика регулятора | 17-038Б | 1 |
| 3 | Шестерня валика регулятора | 17-037-1А | 1 |
| 4 | Гнездо шарикоподшипника | 17-036Г | 1 |
| 5 | Шарикоподшипник 46203, ГОСТ 831-54 | — | 1 |
| 6 | Крестовина грузов | 17-033-4 | 1 |
| 7 | Валик регулятора | 17-032-3 | 1 |
| 8 | Кулачок тяги регулятора | 17-059-3 | 1 |
| 9 | Тяга регулятора | 17-058-5 | 1 |
| 10 | Ось вилки короткая | 17-075-1А | 1 |
| 11 | Вилка тяги регулятора | 17-009В-1 | 1 |
| 12 | Болт вилки | 17-013А | 1 |
| 13 | Гайка М8-055, ГОСТ 5929-62 | — | 1 |
| 14 | Прокладка регулировочная | 17-047 | 5 |
| 15 | Пружина регулятора наружная | 17-049А | 1 |
| 16 | Пружина регулятора внутренняя | 17-048-1А | 1 |
| 17 | Болт IIIМ8Х25 кл. 2-015, ГОСТ 7796-62 2-015, ГОСТ 7796-62 |
— | 1 |
| 18 | Заглушка 16, ГОСТ 3111-46 | — | 2 |
| 19 | Штифт цилиндрический | 17-069 | 3 |
| 20 | Болт М6Х16 кл. 2-015, ГОСТ 7798-62 | — | 7 |
| 21 | Крышка корпуса регулятора верхняя | 17-068-3 | 1 |
| 22 | Шайба пружинная 6Н 65Г, ГОСТ 6402-61 | — | 16 |
| 23 | Болт IIIМ6Х16 кл. 2-015, ГОСТ 7798-62 | — | 1 |
| 24 | Прокладка | 17-067 | 1 |
| 25 | Винт призмы | 17-066-1 | 1 |
| 26 | Призма валика обогатителя | 41-1763-1 | 1 |
| 27 | Пружина валика обогатителя | 17-062 | 1 |
| 28 | Шайба сальника валика обогатителя | 17-061 | 1 |
| 29 | Сальник валика обогатителя | 17-004 | 1 |
| 30 | Прокладка | 17-055 | 1 |
| 31 | Крышка регулятора задняя | 17-056 | 1 |
| 32 | Валик обогатителя в сборе | 17-с14-1А | 1 |
| 33 | Ось груза регулятора | 17-045-3 | 2 |
| 35 | Болт регулировочный | 17-022-1 | 1 |
| 36 | Прокладка регулировочная | 17-021 | 3 |
| 37 | Прокладка регулировочная | 17-021-1 | 3 |
| 38 | Прокладка регулировочная | 17-021-2 | 2 |
| 39 | Крышка упора | 17-027-3 | 1 |
| 40 | Втулка груза | 17-043-2 | 4 |
| 41 | Болт IIIМ6Х14 кл. 2-015, ГОСТ 7798-62 2-015, ГОСТ 7798-62 |
— | 3 |
| 42 | Груз регулятора | 17-042-2А | 2 |
| 43 | Валик с рычагом | 17-018-4 | 1 |
| 44 | Болт М6Х14 кл. 2-015, ГОСТ 7798-62 | — | 4 |
| 45 | Гайка Мб кл. 2-055, ГОСТ 5915-62 | — | 4 |
| 46 | Винт М6Х12 кл. 2-015, ГОСТ 1490-62 | — | 1 |
| 47 | Болт М6Х14 кл. 2-015, ГОСТ 7799-57 | — | 4 |
| 48 | Шпилька-ограничитель выключения подачи | 17-023 | 1 |
| 49 | Шайба упора | 17-020-2 | 1 |
| 50 | Обойма сальника | 17-007 | 1 |
| 51 | Кольцо сальника | 17-008 | 1 |
| 52 | Корпус регулятора | 03-1701 | 1 |
| 53 | Болт М8Х25 кл. 2-015, ГОСТ 7796-62 2-015, ГОСТ 7796-62 |
— | 7 |
| 54 | Шайба пружинная 8Н 65Г, ГОСТ 6402-61 | — | 8 |
| 55 | Прокладка | 17-057 | 1 |
| 56 | Упор жесткий | 17-074А | 1 |
| 57 | Штифт установочный | 17-002 | 2 |
| 58 | Шайба замковая | 17-054 | 1 |
| 59 | Шарикоподшипник 200, ГОСТ 8338-57 | — | 1 |
| 60 | Седло пружины регулятора | 17-052-2 | 1 |
| 61 | Прокладка регулировочная | 17-050 | 4 |
| 62 | Прокладка регулировочная | 17-050-А | 4 |
| 63 | Муфта регулятора | 17-028-2 | 1 |
| 64 | Втулка муфты | 17-029-2 | 1 |
| 65 | Кронштейн вилки тяги регулятора | 17-011-1 | 1 |
| 66 | Пружина кронштейна | 17-016Б | 1 |
| 67 | Ось кронштейна | 17-012-2 | 1 |
| 68 | Втулка пружины | 17-014-2 | 1 |
| 69 | Болт М6Х20 кл. 2-015, ГОСТ 7798-62 2-015, ГОСТ 7798-62 |
— | 1 |
| 70 | Кольцо стопорное | 17-099 | 4 |
| 71 | Штырь вилки | 17-010А | 2 |
| 72 | Шарикоподшипник 8202, ГОСТ 6874-54 | — | 1 |
| 73 | Шплинт 2Х12-005, ГОСТ 397-64 | — | 2 |
| 74 | Шайба оси груза | 17-044А | 8 |
онлайн — Clideo
Измените скорость вашего видео онлайн
Вы ищете способ ускорить воспроизведение видео без необходимости загружать дорогостоящие приложения или сомнительное программное обеспечение? Вы пришли в нужное место. Наш инструмент, указанный выше, работает в Интернете, прямо из любого браузера, будь то Chrome, Firefox или Safari.
Беспокоитесь о безопасности? Не надо! Только у вас есть доступ к загружаемым вами файлам, и, что еще лучше, они хранятся всего 24 часа, прежде чем они будут полностью удалены с наших серверов, чтобы их больше никто не видел.
Обратите внимание, что контроллер скорости видео работает на устройствах Android и iOS, а также на компьютерах Windows или Mac.
Загрузите свой клип
Вверху этой страницы вы найдете синюю кнопку «Выбрать файл». Нажмите, чтобы загрузить клип со своего устройства.
Видите маленькую стрелку справа? Нажмите на нее, и появится раскрывающееся меню, в котором вы сможете загрузить прямо из учетной записи Google Диска или Dropbox.
Кроме того, вы можете добавить клип прямо из места в Интернете, например YouTube, просто вставив URL-адрес в поле внизу раскрывающегося меню.

Ускорение или замедление
После добавления видео вы попадете в редактор, где можете выбрать ускорение или замедление.Используйте ползунок в правом верхнем углу для увеличения с шагом 0,05x от 0,25 до 4x.
Затем не забудьте проверить кнопку отключения звука внизу, если вы хотите, чтобы в вашем клипе не было странного замедленного и ускоренного звука.
При необходимости вы также можете изменить формат вывода видео в левом нижнем углу. Мы рекомендуем формат MP4 для мобильных устройств и платформ социальных сетей, таких как Instagram и Facebook.
Наконец, нажмите кнопку «Скорость». Во время обработки нового клипа вы увидите какой-то удерживаемый текст.
Скачайте и наслаждайтесь
Все, что осталось сделать сейчас, — это предварительно просмотреть новый клип перед его загрузкой.
Если вы обнаружите, что требуются некоторые изменения, просто нажмите кнопку «Назад к редактированию» без необходимости начинать с нуля.Чтобы сохранить клип обратно на свое устройство, нажмите кнопку «Загрузить». Как и раньше, вы можете сохранить его в облаке в свои учетные записи Dropbox или Google Drive с помощью стрелки вниз справа.

 Если вы обнаружите, что требуются некоторые изменения, просто нажмите кнопку «Назад к редактированию» без необходимости начинать с нуля.
Если вы обнаружите, что требуются некоторые изменения, просто нажмите кнопку «Назад к редактированию» без необходимости начинать с нуля.Контроллер скорости видео YouTube — Clideo
Пользовательский контроль скорости воспроизведения YouTube
При просмотре зарубежных клипов или впечатляющих видеороликов нам может потребоваться замедлить их, чтобы вобрать в себя каждую деталь и понять каждое слово. Иногда тема записи настолько ясна и известна, что нет смысла терять время, и мы можем ускорить видео.
Вот тут-то и пригодится наш регулятор скорости YouTube.
Работает онлайн во всех современных браузерах, таких как Google Chrome, Firefox, Opera и т. Д. Позволяет бесплатно изменить скорость файла размером 500 МБ. Также он работает со всеми операционными системами: iOS, Android, macOS, Windows, Linux.
Д. Позволяет бесплатно изменить скорость файла размером 500 МБ. Также он работает со всеми операционными системами: iOS, Android, macOS, Windows, Linux.
Вставить ссылку на видео YouTube
Вызвать раскрывающееся меню справа от большой синей кнопки и вставить прямой URL-адрес необходимого видео YouTube.Вы также можете редактировать клипы, опубликованные на любых других веб-сайтах или в социальных сетях.
Если вы хотите обработать файл из других источников, загрузите его со своего личного устройства, Google Диска или Dropbox.
Установить скорость
Выберите одну из 6 предустановок, предоставляемых переключателем скорости, или установите индивидуальную скорость от 0,25x до 4x.
Отключите звук в видео, чтобы избежать эффекта голоса Дональда Дака, или оставьте звук, если он вам нужен.Выберите расширение вывода. Для дальнейшего размещения на YouTube рекомендуются MP4 и MOV.
Нажмите «Скорость» и подождите, пока ваш клип будет обработан.
Скачать результат
Как только вы будете довольны результатом, сохраните его на своем устройстве или в облачном хранилище. Если вы хотите попробовать другие скорости, нажмите «Назад к редактированию» и продолжайте.
 Отключите звук в видео, чтобы избежать эффекта голоса Дональда Дака, или оставьте звук, если он вам нужен.
Отключите звук в видео, чтобы избежать эффекта голоса Дональда Дака, или оставьте звук, если он вам нужен.Загрузить Video Speed Controller 0.6.1
Изящное расширение, которое предоставляет собственный API для видео HTML5, позволяющий изменять скорость воспроизведения и перематывать или переходить к видео.

HTML5-видео — это клипы, загруженные непосредственно на сайт и включенные в код. Для работы HTML5-видео не нужен плагин, но он может не совместим со всеми браузерами или форматами.Если у вас есть куча видео HTML5 для просмотра и вы хотите, чтобы некоторые быстрые элементы управления улучшили ваш опыт, Video Speed Controller может помочь вам.
Проверка горячих клавиш
После установки расширения оно автоматически применит свои эффекты на любом веб-сайте. Поскольку инструмент использует горячие клавиши, чтобы помочь вам с контролем, вам следует сначала взглянуть на настройки. Эффекты связаны с увеличением / уменьшением скорости воспроизведения, настройками маркеров, перемоткой назад и отключением звука.
При доступе к настройкам вы заметите, что есть две категории — Ярлыки и Другое . В разделе «Горячие клавиши» вы найдете семь горячих клавиш, а также их описание и значение. Всего существует одиннадцать функций, и вы можете включить их все, добавив новые строки.
Внесение сайтов в черный список
Если вам нужно отключить расширение на определенных сайтах, вам не нужно использовать кнопку Отключить , так как эта кнопка полностью останавливает его.Однако, если вы посмотрите категорию «Другое», вы заметите поле с несколькими адресами, которые служат для примера. Очистите список, введите свой сайт, который хотите внести в черный список, и нажмите «Сохранить».
Перед тем, как завершить «Другое», стоит упомянуть, что вы также можете установить прозрачность контроллера, а также установить флажок и поле, которые будут запоминать скорости воспроизведения и применять их.
Удобный инструмент для HTML5 видео
В заключение, Video Speed Controller — это простое расширение, которое добавляет основные горячие клавиши управления видео для любого клипа в формате HTML5, так что вы можете переходить дальше к видео или пересматривать любимые сцены с более высокой / низкой скоростью воспроизведения.
Файл
Воспроизведение HMTL5 Горячая клавиша HTML5 Перемотка видео назад HTML5 API Управление видео
JETI модель s. р. о.
Доступны 2 основных типа регуляторов скорости; для щеточных двигателей (DC — коммутатор) и для бесщеточных двигателей BLDC. Другими факторами при выборе контроллера являются диапазон напряжений аккумуляторных батарей привода, требования к току двигателя и метод, используемый для питания приемника и сервоприводов. Контроллеры скорости Jeti обычно обеспечивают тепловую защиту, защиту аккумулятора от низкого напряжения (LVC) и защиту от перегрузки по току.Контроллеры BEC (Battery Eliminator Circuit) включают в себя интегральную схему для обеспечения стабилизированного источника питания для питания приемника и сервоприводов. Контроллеры, не имеющие BEC, имеют маркировку OPTO и требуют использования батареи приемника (4 или 5 x NiXX) или внешнего BEC (Jeti MAX BEC рекомендуется использовать с NiXX до 12 элементов, 3S LiPo или 4S A123).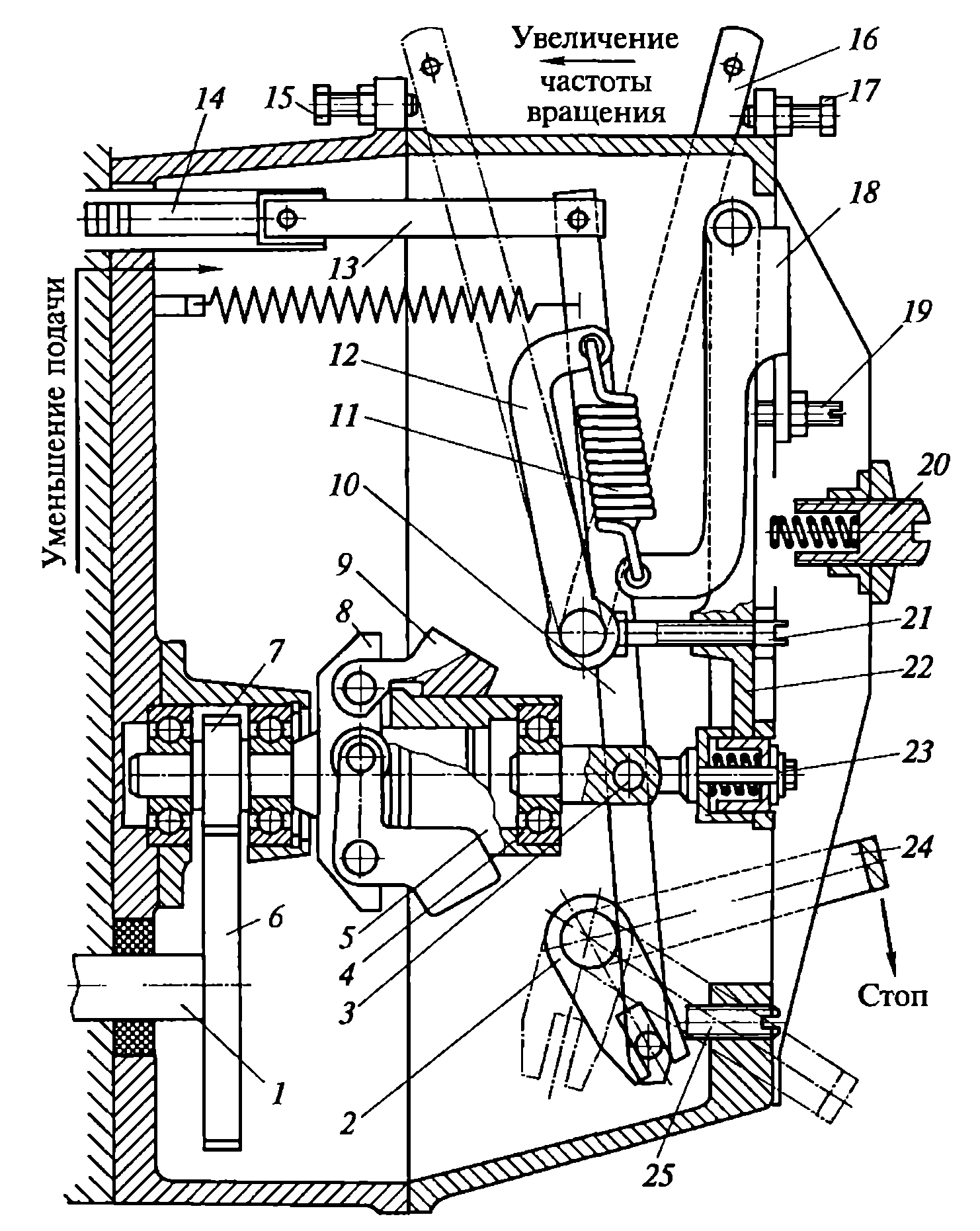 Контроллеры OPTO предназначены для обеспечения полной гальванической развязки источника питания от радиосистемы. Контроллеры OPTO рекомендуются, когда схем BEC недостаточно для ваших нужд из-за большого количества сервоприводов, использования цифровых сервоприводов или для моделей с высоким потреблением тока или высоким рабочим напряжением.
Контроллеры OPTO предназначены для обеспечения полной гальванической развязки источника питания от радиосистемы. Контроллеры OPTO рекомендуются, когда схем BEC недостаточно для ваших нужд из-за большого количества сервоприводов, использования цифровых сервоприводов или для моделей с высоким потреблением тока или высоким рабочим напряжением.
Отдельные линии контроллеров | Заявка | Типы согласно ток [A] | Типы согласно напряжение [В] | BEC | Возможности настройки параметров | Телеметрия |
ЭКО | Начинающие | 12–25 | 5–16 | линейный | Джемпер | № |
ПРОДВИЖЕНИЕ | Продвинутый | 4–90 | 5–42 | линейный | Prog Card | № |
HiCOPTER | Мультикоптер | 30–90 | 5–42 | – | – | № |
МАСТЕР | Спецпредложения для хакеров | 4 — 195 | 5–42 | линейная | Prog Box | № |
ОТЖИМ | Приложения с высокими требованиями | 11–200 | 5-59 | переключение | ДЖЕТИБОКС | ДЖЕТИБОКС |
МЕЗОН | Самолеты и вертолеты большой мощности | 75–165 | 6-59 | переключение | ДЖЕТИБОКС | ДЖЕТИБОКС, EX |
МЕЗОН ПРО | Самолеты большой мощности (хотлайнер) | 40–80 | 5–51 | переключение | Датчики JETIBOX / JETI | JETIBOX, EX Автобус |
Лучшие и важные методы контроля
В период 18 -го и -го века произошла эволюция двигателей постоянного тока. Развитие двигателей постоянного тока значительно расширилось, и они широко применяются во многих отраслях промышленности. В начале 1800-х годов и с усовершенствованиями, сделанными в 1832 году, двигатели постоянного тока были первоначально разработаны британским исследователем Стердженом. Он изобрел начальный коммутаторный двигатель постоянного тока, в котором он также может моделировать механизмы. Но можно задаться вопросом, каковы функциональные возможности двигателя постоянного тока и почему важно знать об управлении скоростью двигателя постоянного тока. Итак, эта статья четко объясняет его работу и различные методы контроля скорости.
Развитие двигателей постоянного тока значительно расширилось, и они широко применяются во многих отраслях промышленности. В начале 1800-х годов и с усовершенствованиями, сделанными в 1832 году, двигатели постоянного тока были первоначально разработаны британским исследователем Стердженом. Он изобрел начальный коммутаторный двигатель постоянного тока, в котором он также может моделировать механизмы. Но можно задаться вопросом, каковы функциональные возможности двигателя постоянного тока и почему важно знать об управлении скоростью двигателя постоянного тока. Итак, эта статья четко объясняет его работу и различные методы контроля скорости.
Что такое двигатель постоянного тока?
Двигатель постоянного тока работает на постоянном токе, преобразуя полученную электрическую энергию в механическую. Это вызывает изменение вращения в самом устройстве, таким образом обеспечивая питание для работы различных приложений в нескольких областях.
Регулировка скорости двигателя постоянного тока — одна из наиболее полезных функций двигателя. Контролируя скорость двигателя, вы можете изменять скорость двигателя в соответствии с требованиями и получать необходимую работу.
Контролируя скорость двигателя, вы можете изменять скорость двигателя в соответствии с требованиями и получать необходимую работу.
Механизм контроля скорости применим во многих случаях, например, для управления движением роботизированных транспортных средств, движением двигателей на бумажных фабриках и движением двигателей в лифтах, где используются различные типы двигателей постоянного тока.
Принцип работы двигателя постоянного тока
Простой двигатель постоянного тока работает по принципу: когда токопроводящий проводник помещается в магнитное поле, на него действует механическая сила. В практическом двигателе постоянного тока якорь является проводником по току, а поле создает магнитное поле.
Когда на проводник (якорь) подается ток, он создает собственный магнитный поток. Магнитный поток либо суммируется с магнитным потоком из-за обмоток возбуждения в одном направлении, либо компенсирует магнитный поток, обусловленный обмотками возбуждения. Накопление магнитного потока в одном направлении по сравнению с другим оказывает давление на проводник, и поэтому он начинает вращаться.
Согласно закону электромагнитной индукции Фарадея вращательное действие проводника создает ЭДС.Эта ЭДС, согласно закону Ленца, имеет тенденцию противодействовать причине, то есть подаваемому напряжению. Таким образом, двигатель постоянного тока имеет особую характеристику регулирования своего крутящего момента в случае изменения нагрузки из-за обратной ЭДС.
Почему важно регулирование скорости двигателя постоянного тока?
Контроль скорости в машине показывает влияние на скорость вращения двигателя, где это прямое влияние на функциональность машины и так важно для производительности и результатов работы. Во время сверления каждый материал имеет свою скорость вращения, которая также меняется в зависимости от размера сверла.
В сценарии с насосными установками произойдет изменение производительности, поэтому конвейерная лента должна быть синхронизирована с функциональной скоростью устройства. Эти факторы прямо или косвенно зависят от скорости двигателя. Из-за этого следует учитывать скорость двигателя постоянного тока и соблюдать различные типы методов управления скоростью.
Регулировка скорости двигателя постоянного тока осуществляется либо вручную рабочим, либо с помощью любого инструмента автоматического управления. Похоже, что это контрастирует с ограничением скорости, когда должно быть регулирование скорости, противодействующее естественному изменению скорости из-за изменения нагрузки на вал.
Принцип управления скоростью
Из приведенного выше рисунка уравнение напряжения для простого двигателя постоянного тока:
В = Eb + IaRa
В — подаваемое напряжение, Eb — обратная ЭДС, Ia — якорь ток, Ra — сопротивление якоря.
Мы уже знаем, что
Eb = (PøNZ) / 60A.
P — количество полюсов,
A — постоянное
Z — количество проводников
N — скорость двигателя
Подставляя значение Eb в уравнение напряжения, получаем
V = ( (PøNZ) / 60A) + IaRa
Или, V — IaRa = (PøNZ) / 60A
i. е., N = (PZ / 60A) (V — IaRa) / ø
е., N = (PZ / 60A) (V — IaRa) / ø
Вышеприведенное уравнение также можно записать как:
N = K (V — IaRa) / ø, K — постоянная
Это подразумевает три вещи:
- Скорость двигателя прямо пропорциональна напряжению питания.
- Скорость двигателя обратно пропорциональна падению напряжения на якоре.
- Скорость двигателя обратно пропорциональна магнитному потоку из-за результатов поля.
Таким образом, скорость двигателя постоянного тока можно контролировать тремя способами:
- Изменяя напряжение питания
- Изменяя поток, и изменяя ток через обмотку возбуждения
- Изменяя напряжение якоря и изменяя сопротивление якоря
Различные методы управления скоростью двигателя постоянного тока
Поскольку существует два типа двигателей постоянного тока, здесь мы четко обсудим методы управления скоростью как последовательных, так и параллельных двигателей постоянного тока.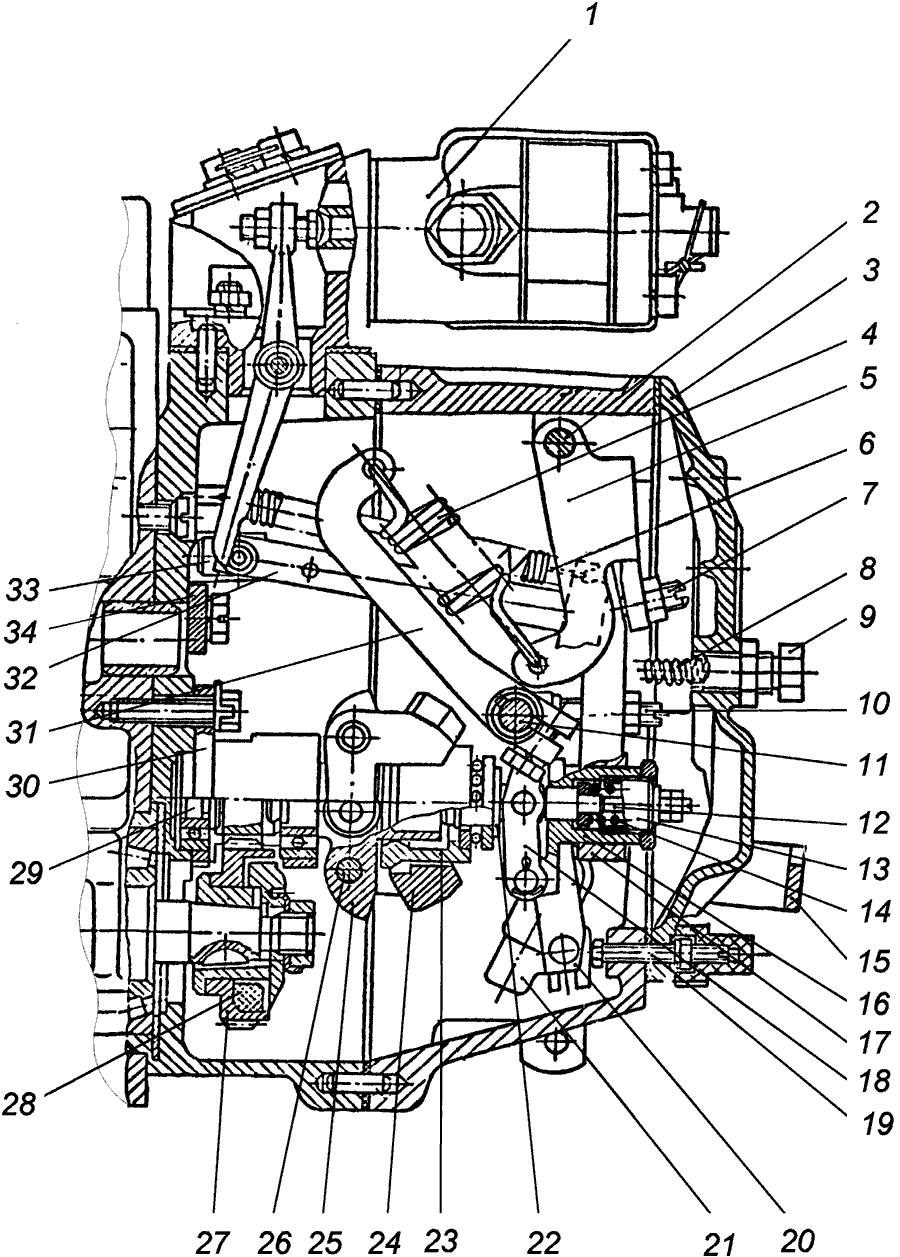
Управление скоростью двигателя постоянного тока в серийных типах
Его можно разделить на два типа:
- Техника с управлением якорем
- Техника с полевым управлением
Техника с управлением якорем далее подразделяется на три типа
- Якорь контролируемое сопротивление
- Управление шунтированным якорем
- Напряжение на клеммах якоря
Регулируемое сопротивление якоря
Этот метод наиболее широко используется там, где регулирующее сопротивление последовательно соединено с сопротивлением источника питания двигателя.Изображение ниже объясняет это.
Контроль сопротивления якоря Потери мощности, которые происходят в управляющем сопротивлении двигателя постоянного тока, можно игнорировать, поскольку этот метод регулирования в основном используется в течение длительного периода времени для снижения скорости во время сценариев легкой нагрузки. Это рентабельный метод получения постоянного крутящего момента, который в основном применяется в приводных кранах, поездах и других транспортных средствах.
Управление шунтированным якорем
Здесь реостат будет иметь как последовательное, так и шунтирующее соединение с якорем.Будет изменяться уровень напряжения, подаваемого на якорь, и это зависит от изменения последовательного реостата. Тогда как изменение тока возбуждения происходит за счет смены шунтирующего реостата. Этот метод управления скоростью в двигателе постоянного тока не так дорог из-за значительных потерь мощности в сопротивлениях регулирования скорости. Скорость можно до некоторой степени регулировать, но не выше нормального уровня.
Метод управления скоростью двигателя постоянного тока с шунтированным якоремНапряжение на клеммах якоря
Скорость двигателя постоянного тока также может быть достигнута путем подачи питания на двигатель с использованием индивидуального переменного напряжения питания, но этот подход является дорогостоящим и широко не применяется.
Техника с полевым управлением далее подразделяется на два типа:
- Полевой дивертер
- Управление задействованным полем (управление полем с отводом)
Техника полевого переключателя
В этом методе используется дивертор. Скорость потока, проходящего через поле, можно уменьшить, шунтировав некоторую часть тока двигателя через последовательное поле. Чем меньше сопротивление дивертора, тем меньше ток возбуждения. Этот метод используется не только для нормального диапазона скоростей, но и для электрических приводов, где скорость увеличивается при уменьшении нагрузки.
Скорость потока, проходящего через поле, можно уменьшить, шунтировав некоторую часть тока двигателя через последовательное поле. Чем меньше сопротивление дивертора, тем меньше ток возбуждения. Этот метод используется не только для нормального диапазона скоростей, но и для электрических приводов, где скорость увеличивается при уменьшении нагрузки.
Управление отводным полем
Здесь также, с уменьшением магнитного потока, скорость будет увеличиваться, что достигается за счет уменьшения количества витков обмотки возбуждения, откуда протекает ток. Здесь убирают количество ответвлений в обмотке возбуждения и этот прием используется в электрических тягах.
Управление скоростью параллельного двигателя постоянного тока
Его можно разделить на два типа:
- Метод управления полем
- Метод управления якорем
Метод управления полем шунтирующего двигателя постоянного тока
В этом методе магнитный поток, создаваемый обмотками возбуждения, варьируется для изменения скорости двигателя.
Поскольку магнитный поток зависит от тока, протекающего через обмотку возбуждения, его можно изменять, изменяя ток через обмотку возбуждения. Это может быть достигнуто путем использования переменного резистора последовательно с резистором обмотки возбуждения.
Первоначально, когда переменный резистор находится в минимальном положении, номинальный ток течет через обмотку возбуждения из-за номинального напряжения питания, и в результате скорость остается нормальной. При постепенном увеличении сопротивления ток через обмотку возбуждения уменьшается.Это, в свою очередь, снижает создаваемый поток. Таким образом, скорость двигателя увеличивается сверх своего нормального значения.
Метод управления сопротивлением якоря для шунтирующего двигателя постоянного тока
С помощью этого метода скорость двигателя постоянного тока можно регулировать путем управления сопротивлением якоря для управления падением напряжения на якоре. В этом методе также используется переменный резистор, включенный последовательно с якорем.
Когда переменный резистор достигает минимального значения, сопротивление якоря становится нормальным, и, следовательно, напряжение якоря падает.Когда значение сопротивления постепенно увеличивается, напряжение на якоре снижается. Это, в свою очередь, приводит к снижению скорости двигателя.
С помощью этого метода достигается скорость двигателя ниже его нормального диапазона.
Метод управления напряжением якоря для шунтирующего двигателя постоянного тока (метод Уорда Леонарда)
Метод Уорда Леонарда для схемы управления скоростью двигателя постоянного тока показан следующим образом:
На приведенном выше рисунке M — главный двигатель, скорость которого равна должен регулироваться, а G соответствует индивидуально возбужденному генератору постоянного тока, который приводится в действие трехфазным двигателем, и он может быть синхронным или асинхронным.Эта комбинация генератора постоянного тока и двигателя переменного тока называется набором M-G.
Напряжение генератора изменяется путем изменения тока возбуждения генератора. Этот уровень напряжения, когда он подается на секцию якоря двигателя постоянного тока, а затем M изменяется. Чтобы поддерживать постоянным поток поля двигателя, ток возбуждения двигателя должен поддерживаться постоянным. Когда скорость двигателя регулируется, ток якоря двигателя должен быть таким же, как и номинальный уровень.
Поставляемый ток возбуждения будет другим, поэтому уровень напряжения якоря изменяется от «0» до номинального уровня. Поскольку регулирование скорости соответствует номинальному току и постоянному потоку поля двигателя и магнитному потоку поля до достижения номинальной скорости. И поскольку мощность является продуктом скорости и крутящего момента, она прямо пропорциональна скорости. При этом при увеличении мощности скорость увеличивается.
Оба вышеупомянутых метода не могут обеспечить регулирование скорости в желаемом диапазоне.Более того, метод управления потоком может повлиять на коммутацию, тогда как метод управления якорем включает огромные потери мощности из-за использования резистора, включенного последовательно с якорем. Поэтому часто желателен другой метод — тот, который регулирует напряжение питания для управления скоростью двигателя.
Поэтому часто желателен другой метод — тот, который регулирует напряжение питания для управления скоростью двигателя.
Следовательно, с помощью метода Уорда Леонарда регулируемый силовой привод и постоянное значение крутящего момента достигаются от минимального уровня скорости до уровня базовой скорости. Техника регулирования потока поля в основном используется, когда уровень скорости больше, чем базовая скорость.
Здесь, в этой функциональности, ток якоря поддерживается на постоянном уровне при заданном значении, а значение напряжения генератора поддерживается на постоянном уровне. В таком методе обмотка возбуждения получает фиксированное напряжение, а якорь — переменное напряжение.
Один из таких методов управления напряжением включает использование механизма распределительного устройства для подачи переменного напряжения на якорь, а другой использует генератор переменного тока с приводом от двигателя для подачи переменного напряжения на якорь (система Уорда-Леонарда) .
Преимущества и недостатки методики Уорда Леонарда d:
Преимущества использования техники Уорда Леонарда для управления скоростью двигателя постоянного тока следующие:
- В обоих направлениях можно управлять скоростью устройства. плавным образом для расширенного диапазона
- Этот метод обладает внутренней тормозной способностью
- Задние реактивные вольт-амперы уравновешиваются посредством привода, а синхронный двигатель с сильным возбуждением действует как привод, поэтому коэффициент мощности будет увеличиваться
- Когда есть мигающая нагрузка, приводным двигателем является асинхронный двигатель, имеющий маховик, который используется для уменьшения мгновенной нагрузки до минимального уровня.
Недостатками метода Уорда Леонарда являются:
- As, потому что этот метод имеет комплект двигателя и генератора, стоимость больше
- Устройство сложное по конструкции и имеет большой вес
- Требуется больше места e для установки
- Требуется регулярное техническое обслуживание и фундамент не рентабельно
- Будут огромные потери, поэтому эффективность системы снизится
- Создается больше шума
И применение метода Уорда Леонарда плавное управление скоростью в двигателе постоянного тока. Некоторые из примеров — шахтные подъемники, бумажные фабрики, подъемники, прокатные станы и краны.
Некоторые из примеров — шахтные подъемники, бумажные фабрики, подъемники, прокатные станы и краны.
Помимо этих двух методов, наиболее широко используемым методом является управление скоростью двигателя постоянного тока с использованием ШИМ для управления скоростью двигателя постоянного тока. ШИМ включает в себя приложение импульсов переменной ширины к драйверу двигателя для управления напряжением, подаваемым на двигатель. Этот метод оказался очень эффективным, поскольку потери мощности сведены к минимуму, и он не требует использования какого-либо сложного оборудования.
Метод управления напряжениемНа приведенной выше блок-схеме представлен простой регулятор скорости электродвигателя. Как показано на приведенной выше блок-схеме, микроконтроллер используется для подачи сигналов ШИМ на драйвер двигателя. Драйвер двигателя представляет собой микросхему L293D, которая состоит из H-мостовых схем для управления двигателем.
ШИМ достигается путем изменения импульсов, подаваемых на разрешающий вывод микросхемы драйвера двигателя, для управления приложенным напряжением двигателя. Изменение импульсов осуществляется микроконтроллером с помощью входного сигнала от кнопок.Здесь предусмотрены две кнопки, каждая для уменьшения и увеличения рабочего цикла импульсов.
Изменение импульсов осуществляется микроконтроллером с помощью входного сигнала от кнопок.Здесь предусмотрены две кнопки, каждая для уменьшения и увеличения рабочего цикла импульсов.
Итак, в этой статье дается подробное объяснение различных методов управления скоростью двигателя постоянного тока и того, как наиболее важно соблюдать управление скоростью. Кроме того, рекомендуется знать о контроллере скорости двигателя 12 В постоянного тока.
Страница не найдена — Industrial Devices & Solutions
- Политика в отношении файлов cookie
- Потребитель
- Бизнес
- Продукты
- Руководства по применению
- Загрузить
- Поддержка дизайна
- Новости
- Свяжитесь с нами
- Конденсаторы
- Резисторы
- Катушки индуктивности
- Решения для управления температурным режимом
- Компоненты ЭМС, защита цепей
- Датчики
- Устройства ввода
- Полупроводники
- Реле, разъемы
- FA Датчики и компоненты
- Моторы, компрессоры
- Промышленные устройства, носители информации
- Пользовательские и модульные устройства
- Завод автоматики, сварочные аппараты
- Промышленные батареи
- Электронные материалы
- Материалы
- Проводящие полимерные электролитические конденсаторы
- Алюминиевые электролитические конденсаторы
- Электрические двухслойные конденсаторы (золотой конденсатор)
- Пленочные конденсаторы
- Чип резисторы
- Другие резисторы
- Силовые индукторы для автомобильного применения
- Силовые индукторы для потребителей
- Силовые индукторы многослойного типа
- Катушки повышения напряжения
- Лист термозащиты (Графитовый лист (PGS) / продукты, применяемые PGS / NASBIS)
- Термистор NTC (чип)
- Вентилятор охлаждения с уникальным гидродинамическим подшипником
- Материалы печатных плат
- Компоненты ЭМС
- Защита цепи (электростатический разряд, скачок напряжения, предохранитель и т. Д.)
 Д.)
Д.)- Датчики
- Встроенные датчики
- Датчики для автоматизации производства
- Переключатели
- Емкостное чувствительное устройство
- Энкодеры, потенциометры
- Микрокомпьютеры
- Аудио и видео
- Тег NFC и защищенная микросхема
- ИС драйвера светодиодов
- ИС драйвера двигателя
- МОП-транзисторы
- Лазерные диоды
- Датчики изображения
- Радиочастотные устройства
- Силовые устройства
- Реле
- Разъемы
- Датчики для автоматизации производства
- Устройства FA
- Двигатели для FA и промышленного применения
- Двигатели для предприятий / бытовой техники и автомобилей
- Компрессоры
- Насосы постоянного тока
- Носители записи
- Оптические компоненты
- Пользовательские устройства
- Модульные устройства
- FA
- Сварочные аппараты, промышленные роботы
- Устройства FA
- Вторичные батареи (аккумуляторы)
- Первичные батареи
- Материалы печатных плат
- Полупроводниковые герметизирующие материалы, клеи
- Пластиковый формовочный состав
- Продвинутые фильмы
- Монокристалл оксида цинка пана-тетра
- Составная смола Pana-Tetra
- Пленка для предотвращения электризации Pana-Tetra
- «AMTECLEAN A» Чистящее средство для термопластавтоматов
- «AMTECLEAN Z» Неорганическое противомикробное средство
- Проводящие полимерные алюминиевые электролитические конденсаторы (SP-Cap)
- Твердотельные конденсаторы из токопроводящего полимера и тантала (POSCAP)
- Проводящие полимерные алюминиевые твердотельные конденсаторы (OS-CON)
- Проводящие полимерные гибридные алюминиевые электролитические конденсаторы
- Проводящие полимерные алюминиевые твердотельные конденсаторы (OS-CON)
- Проводящие полимерные гибридные алюминиевые электролитические конденсаторы
- Алюминиевые электролитические конденсаторы (поверхностного монтажа)
- Алюминиевые электролитические конденсаторы (с радиальными выводами)
- Электрические двухслойные конденсаторы (намотанного типа)
- Пленочные конденсаторы (для электронного оборудования)
- Пленочные конденсаторы (для двигателей переменного тока)
- Пленочные конденсаторы (автомобильные, промышленные и инфраструктурные)
- Высокотемпературные чип-резисторы
- Прецизионные чип-резисторы
- Токочувствительные чип-резисторы
- Чип-резисторы малой и большой мощности
- Антисульфурные чип-резисторы
- Чип-резисторы общего назначения
- Сетевой резистор
- Резисторы с выводами
- Аттенюатор
- Силовые индукторы для автомобильного применения
- Силовые индукторы для потребителей
- Силовые индукторы многослойного типа
- Катушки повышения напряжения
- Лист термозащиты (Графитовый лист (PGS) / продукты, применяемые PGS / NASBIS)
- Термистор NTC (чип)
- Вентилятор охлаждения с уникальным гидродинамическим подшипником
- Материалы плат для светодиодного освещения / силовых модулей «ECOOL» серии
- Фильтры синфазных помех
- Пленка для защиты от электромагнитных волн
- Подавитель ЭСР
- Варистор микросхемы
- Варисторы (поглотитель перенапряжения ZNR)
- Предохранители
- Датчик MR
- Инерционный датчик 6DoF для автомобилей (датчик 6в1)
- Гироскопические датчики
- Датчики температуры (автомобильные)
- Датчики положения
- Инфракрасный датчик Grid-EYE
- Датчики давления PS-A (встроенная схема усиления и температурной компенсации)
- PS Датчики давления
- Датчики давления PF
- Датчик пыли (PM)
- Камера TOF
- Датчик движения PIR PaPIRs
- Волоконно-оптические датчики
- Световые завесы / Компоненты безопасности
- Датчики площади
- Фотоэлектрические датчики / лазерные датчики
- Микро-фотоэлектрические датчики
- Индуктивные датчики приближения
- Датчики давления / датчики расхода
- Датчики измерения
- Датчики особого назначения
- Опции датчика
- Системы экономии проволоки
- Детекторные переключатели
- Кнопочные переключатели
- Тактильные переключатели (переключатели Light Touch)
- Кулисные переключатели питания
- Переключатели уплотнительного типа
- Выключатели без уплотнения
- Сенсорные панели
- Концевые выключатели
- Переключатели мгновенного действия
- Выключатели обнаружения падения
- Выключатели блокировки
- Датчик силы емкостный
- Энкодеры
- Автомобильные кодеры
- Потенциометры поворотные
- Автомобильные поворотные потенциометры
- 32-битное управление инвертором MN103H
- 32-битное управление инвертором MN103S
- 32-разрядная система с низким энергопотреблением MN103L
- 8 бит с низким энергопотреблением MN101E
- 8 бит с низким энергопотреблением MN101C
- 8-битная сверхнизкая мощность MN101L
- MCU Arm® Cortex®-M7 MN1M7
- Arm® Cortex®-M0 + MCU MN1M0
- БИС дисплея интерфейса человек-машина
- Аудио интегрированные БИС
- БИС тегов NFC
- Модули тегов NFC
- Безопасная IC
