Роботизированная коробка передач — что это? Плюсы и минусы. Отличия от автоматической
Введение
Большинство людей, имеющих автомобили, при фразе «Автоматическая коробка передач» представляют себе селектор выбора режима движения вместо рычага «механики» на центральном тоннеле и две педали заместо прежней тройки.
Но есть вторая категория автолюбителей. Они знают о том, что есть разновидности автоматических трансмиссий.
Самой распространенной после классической автоматической гидротрансформаторной коробки передач является коробка-робот.
Результатом прочтения нашей статьи станет точный и максимально подробный ответ на вопрос: «коробка передач робот — что это такое?»
Итак, начнем.
Роботизированная коробка передач – одна из разновидностей автоматических трансмиссий. Но дабы лучше понять, в чем отличия от классической автоматической трансмиссии, необходимо рассмотреть конструкцию типовой роботизированной коробки передач.
Конструкция в подробностях
Важно помнить, что коробка передач от каждого производителя может отличаться своими особенностями, что рождает несколько отличную от типовой конструкцию. Но даже в этом всем разнообразии можно разглядеть 4 элемента, присутствующие в каждом из подобных агрегатов.
Но даже в этом всем разнообразии можно разглядеть 4 элемента, присутствующие в каждом из подобных агрегатов.
Это сцепление, его привод, механическая часть, т.е. сама коробка передач и ее приводы переключения, а также центральный блок управления обоими приводами для координации всей работы.
Теперь, когда основные «герои» известны, займемся изучением всей «пьесы». Т.к. в основе имеется стандартная коробка передач, не будем описывать подробно её принцип работы. Лишь упомянем, что внутри ее корпуса находятся 2 вала — первичный (или ведущий) и вторичный (или ведомый). Далее, шестерни, расположенные на них, переводятся в необходимое положение с помощью системы тяг для зацепления и дальнейшей совместной работы по вращению.
Это все о механической части роботизированной коробки. А вот сам механизм управления переключениями – это включение привода сцепления и переключение передач при помощи актуаторов. Важно лишь обозначить, что они могут быть 2-х видов – электрическими, либо гидравлическими. Первые работают максимально плавно, но требуют дополнительных затрат энергии для своей работы. Электрические же менее затратные, но именно они порождают толчки от переключений.
Первые работают максимально плавно, но требуют дополнительных затрат энергии для своей работы. Электрические же менее затратные, но именно они порождают толчки от переключений.
Итак, получаем на выходе автоматическое управление привычной коробкой передач при том, что в салоне расположен селектор заместо рычага и педалей две вместо трех.
Но действий, которые невидны владельцу, при нажатии газа здесь намного больше. Ведь о всех них заботится блок управления, какой, по существу, есть компьютером, посылающим команды подконтрольным приводам включения и переключения.
Плюс и минус
Как любой механизм, роботизированная коробка передач имеет свои плюсы и минусы.
Автомобильные форумы просто разрывались различными комментариями, в основном отрицательными, владельцев автомобилей с подобной трансмиссией. Сейчас же споры утихли – покупатели стали разборчивее и внимательнее относиться к тем характеристикам, которыми обладает приобретаемый автомобиль.
Первый и самый распространенный отрицательный момент – это рывки в момент переключения передачи. В большинстве случаев исправить этот момент невозможно – конструктивная особенность.
В большинстве случаев исправить этот момент невозможно – конструктивная особенность.
Вторым отрицательным моментом является перегрев сцепления при движении в пробках. Происходит это из-за неисправного или «задумчивого» механизма выключения сцепления. Вдобавок, нагревать диски сцепления может торможение, которое выполняет коробка передач, а именно блок управления.
Также немало впечатлений приносит сам процесс переключения между передачами. В отдельных случаях вам необходимо ускориться. Но для переключения передач скорость не соответствует той, что задана в блоке управления для перехода на высшую ступень. И тут автомобиль вместо ускорения начинает замедляться на какие-то секунды и только потом переходить на ускорение. Единственное, что может спасти в таких ситуациях – это знание особенностей работы коробки передач, а также переход в ручное управление.
Еще одной особенностью является постоянное нахождение автомобиля на скорости. Это приводит к износу деталей сцепления в целом и выжимного подшипника в частности.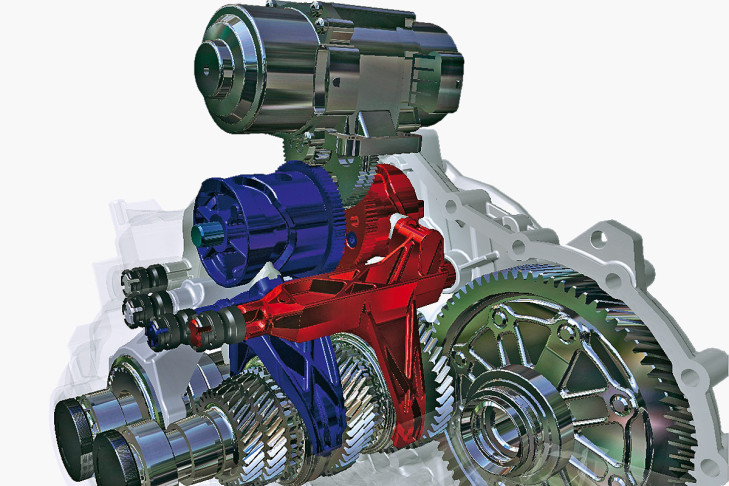 Но, с другой стороны, работать селектором без нужды нет смысла.
Но, с другой стороны, работать селектором без нужды нет смысла.
Роботизированная трансмиссия во всем пытается соответствовать гидромеханическому «автомату». В последней при переходе в режим «Drive» и отпущенной педали тормоза автомобиль начинает плавно трогаться. Чтобы повторить подобное технологическое решение, инженеры сделали следующее: блок управления искусственно добавляет оборотов двигателя и частично сводит диски сцепления для начала движения. В итоге получается, что водитель на машине с роботизированной коробкой нажимает педаль тормоза в положении Drive, а сцепление продолжает получать износ, будучи частично сведенным.
По причине конструкции здесь нет режима «Parking». Это значит, что ручной тормоз в исправном состоянии обязательно нужно поддерживать, а также при старте под горку им нужно пользоваться и нельзя «зевать» – в любой момент машина с такой коробкой передач норовит скатиться в противоположную сторону.
Вообще, большинство селекторов управления роботизированными коробками имеют несколько иную форму, чем у классических автоматических трансмиссий. Поэтому визуально определить, какая разновидность коробки передач установлена в данном автомобиле, не составит труда. Во-первых, там отсутствует положение Parking, а во-вторых, присутствуют два уровня управления – ручной и автоматический.
Поэтому визуально определить, какая разновидность коробки передач установлена в данном автомобиле, не составит труда. Во-первых, там отсутствует положение Parking, а во-вторых, присутствуют два уровня управления – ручной и автоматический.
Отсюда можно выделить первую положительную черту роботизированных коробок передач – возможность выбора способа переключения.
Кроме этого, в положительные стороны данной конструкции зачисляют малый вес самой КПП, а также уменьшенный расход топлива, в сравнении с гидромеханикой. Еще важным фактом при выборе подобного агрегата станет цена – она значительно ниже той, что имеет аналогичный автомобиль с классической трансмиссией.
И в заключении нужно отметить, что данную трансмиссию вполне реально обслуживать в гаражных условиях, ведь замена масла аналогична механической коробке передач.
Важно отметить, что автомобильные конструкторы ведущих фирм по-своему добиваются улучшения эксплуатационных характеристик данного вида трансмиссий. К примеру, Volkswagen широко применяет коробки передач DSG со сдвоенным сцеплением. Данная конструкция лишает автомобиль толчков при переключении. Тем же путем пошла компания Ford, представив свою коробку под названием PowerShift.
Данная конструкция лишает автомобиль толчков при переключении. Тем же путем пошла компания Ford, представив свою коробку под названием PowerShift.
Дальше всех в подобных разработках пошла фирма Opel. Она совместно с конструкторским бюро Ricardo изобрела коробки передач под названием Easytronic, главной особенностью который стал единый привод сцепления и выбора скоростей.
Такое конструкторское решение позволило устранить несостыкованность работы двух узлов и снизить вес КПП.
Заключение
Большинство автопроизводителей все чаще смещают внимание к производству автомобилей с автоматическими трансмиссиями.
Но здесь наблюдается уход от классической гидромеханики и поиск аналоговых конструкций. И данная тенденция – не просто погоня за модными тенденциями, а осознанный переход к комфортному управлению автомобилем.
И, самое главное, что роботизированные трансмиссии широко распространены именно в бюджетных автомобилях. Это означает, что производители нашли потребителя для технологичного и одновременно легко обслуживаемого агрегата.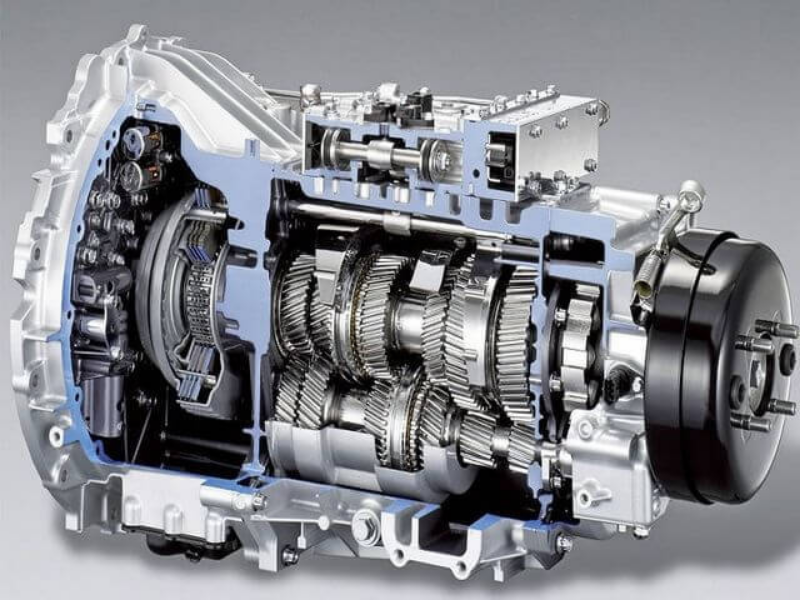
Понравилась статья? Поделиться с друзьями:
Внимание – трансмиссия! — журнал «АБС-авто»
В прошлом номере журнала мы начали рассказывать о трансмиссиях, их особенностях и недостатках, а также проблемах, с которыми сталкиваются авторемонтники. Сегодня – продолжение темы. В прошлый раз мы говорили о трансмиссиях механических и автоматических. Сегодня наша тема: автомеханические, преселективные DSG, вариаторы и так называемые гибридные трансмиссии. Напомню, мы говорим не о достоинствах той или иной конструкции – они достаточно известны. Наша тема о проблемах, с которыми приходится сталкиваться ремонтникам.
Роботы
Итак, поговорим об автомеханических трансмиссиях, в простонародье называемых «роботами». Это та же самая механическая коробка передач – только на месте привода сцепления стоит актуатор, который включает и выключает это сцепление. А на месте механизма выбора передач стоят электродвигатели, как правило «шаговые» – которые приводят в движение кулису, обеспечивая выбор той или иной передачи.
Появление «роботов» вызвано тем, что они проще по конструкции и дешевле традиционных гидравлических «автоматов»: в общем-то, это обычная механика. У Toyota был опыт применения «робота» – в частности, на Auris, Corolla Versa. Проблема была в следующем: по мере выработки деталей в ходе эксплуатации и износа сцепления для «робота» периодически требовался некий хитрый процесс, который дилеры называли «инициализацией».
Первым признаком того, что коробке нужна «инициализация», была потеря момента схватывания сцепления. Для примера – при езде на обычном «автомате» при отпускании педали тормоза автомобиль трогается. Так же должно быть и на «роботе». И если машина не трогалась при отпускании тормоза (а если стояла на подъеме, то иногда начинала и двигаться назад) – это был явный показатель того, что «роботу» пора… Суть «инициализации» заключается в том, что к диагностическому разъему подключается дилерский сканер и «робот» прогоняется по всем режимам.
Далее следует уровень второй – обучающая поездка. Это значит, что надо было разогнаться до пятой передачи – а потом замедляться, поочередно переключая передачи с пятой на четвертую, потом на третью и так далее вплоть до полной остановки. Затем заглушить двигатель и через определенное время его снова завести. Но в Москве, да и в других крупных городах проделать эту операцию из-за пробок бывает просто невозможно. Операцию «инициализации» на старых коробках надо было делать во время каждого ТО, то есть через 15 тыс. км пробега. На современных этот интервал возрос – до 40-60 тыс. км.
Сейчас этот процесс не лимитирован: «инициализацию» надо проводить, если в ней возникает такая необходимость – напомню: машина при отпускании педали тормоза не едет, или «дергается» при переключении. Собственно, это единственный крупный недостаток, присущий «роботам». Но он надолго отбил интерес к ним у автопроизводителей. В частности, та же Toyota на «Королле» отказалась от «роботов» и перешла на обычный 4-ступенчатый «автомат».
В частности, та же Toyota на «Королле» отказалась от «роботов» и перешла на обычный 4-ступенчатый «автомат».
Но у этой конструкции есть очень много путей для совершенствования. В частности, она лишена недостатков гидравлического «автомата», но обладает его достоинствами. У «робота» есть недостаток по сравнению с преселективными DSG (он более «тугодумный» при переключении). Но при этом у него гораздо проще конструкция – а старая аксиома гласит: чем проще, тем надежнее. Кроме того, у них есть большой потенциал в плане совершенствования программного обеспечения – чтобы в дальнейшем вообще исключить «инициализацию». И первые такие агрегаты у Toyota уже появились: это самообучающиеся «роботы». Так что если говорить о компромиссе между механикой, гидравлическим «автоматом», DSG и вариатором, то «робот» – это самый разумный вариант.
О надежности электромеханических коробок можно сказать следующее – они надежны настолько, насколько надежна «механика». Возможные отказы связаны с отказами исполнительных механизмов-актуаторов: проще говоря, шаговых электродвигателей. Но и к ним в последние годы претензий практически нет: они надежно работают в условиях подкапотного пространства – с перепадом температур, изменением влажности и т.д. И на мой взгляд, именно электромеханические коробки имеют большое будущее.
Но и к ним в последние годы претензий практически нет: они надежно работают в условиях подкапотного пространства – с перепадом температур, изменением влажности и т.д. И на мой взгляд, именно электромеханические коробки имеют большое будущее.
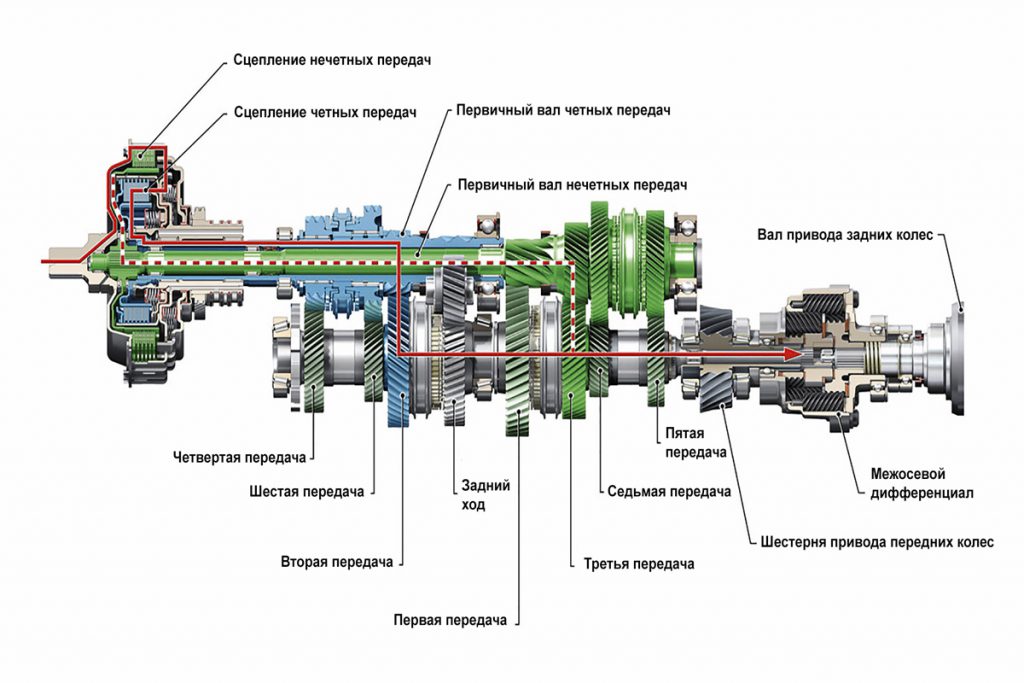
Преселективная коробка передач DSG (Direct Shift Gearbox)
 Один вал завязан с одним диском сцепления, а второй, соответственно, с другим. И все это сделано для того, чтобы уменьшить время переключения передач.
Один вал завязан с одним диском сцепления, а второй, соответственно, с другим. И все это сделано для того, чтобы уменьшить время переключения передач.Эта трансмиссия стала своеобразным «ответом» конструкторов на запросы автовладельцев, которых не устраивала «задумчивость» гидравлических «автоматов» и «роботов» при переключении передач. Работает это примерно так: как только водитель переводит рычаг коробки в положение Drive и нажимает на педаль газа, машина трогается на первой передаче. Как в «роботе», включается сцепление, и крутящий момент передается с первичного вала на вторичный через одну пару шестерен. Но при этом на другой паре валов в зацеплении уже находятся шестерни следующей передачи. И для того чтобы перейти на следующую передачу, достаточно ведущий диск (грубо говоря, «корзину») переместить с одного комплекта сцепления на другое. Это происходит очень быстро – в отличие от «автоматов» и «роботов», которым для переключения необходимо гораздо больше времени. В частности, «роботу» надо выключить сцепление, перейти на другую передачу, а затем опять включить сцепление.
В принципе коробка DSG – та же «механика», только чуть усложненной конструкции. Они проще гидравлических «автоматов», но сложнее «роботов» – из-за наличия двух сцеплений. Преселективная коробка переключает передачи без рывков, фактически без потери оборотов двигателя. Впервые такие коробки появились на немецких автомобилях – Audi, Volkswagen, Skoda (которые – те же «народные автомобили»), Сегодня они ставятся на многие машины, и в частности на «Фольксвагены», которые производятся в Калуге.
К сожалению, у них есть один большой недостаток. Если на «роботах» приходится проводить «инициализацию», чтобы компенсировать износ сцепления, то на DSG это еще более актуально. Мало того, что надо учитывать износ уже двух сцеплений. Еще необходимо сохранять ступицы двух первичных валов в одной и той же плоскости относительно как одного диска сцепления, так и другого. Иначе могут возникнуть очень нехорошие последствия. Например, синхронизаторы – детали не вечные и не всемогущие: им тоже нужно определенное время, чтобы согласовать обороты валов.
При нарушении соосности первичных валов промежуток при переключении передач «вверх» становится настолько малым, что синхронизаторы просто не успевают сработать. А при переключении обратно этот промежуток времени настолько увеличивается, что водитель ощущает толчок. В результате при переключении «вверх» начинается быстрый износ синхронизаторов, а при переключении «вниз» появляются ударные нагрузки на механизмы коробки.
Понятно, что и то и другое сокращает срок службы агрегата. Менее всего этим явлениям подвержены коробки DSG со сцеплением в масляной ванне (мокрым сцеплением). В таких коробках осевые износы не столь велики, поэтому необходимость периодической «инициализации» стремится к нулю. В частности, 6-ступенчатые «мокрые» коробки DSG нареканий у автовладельцев практически не вызывают. А вот 7-ступенчатые коробки с «сухими» сцеплениями создают проблемы, как говорится, «сплошь и рядом».
Существует разница в конструкции «сухих» и «мокрых» коробок DSG. Диски сцепления и той и другой трансмиссий находятся в неразборном моноблоке (разобрать его нельзя, можно только проводить регулировки зазоров сцеплений). Только в «сухом» два ведомых диска «посажены» на разные ступицы внутреннего и наружного первичных валов. А в «мокром» тоже два комплекта сцеплений, но многодисковых (семь, девять, одиннадцать дисков) и помещенных в масляную ванну. Здесь важно отметить еще вот что: регулировки, в частности выставление «в ноль» одного диска сцепления в среднее положение по отношению ко второму диску – процесс очень муторный. Даже у специалистов на это уходит порой немало времени: иногда по нескольку часов работы отверткой, ключами, щупами. И делать это приходится порой частенько.
Только в «сухом» два ведомых диска «посажены» на разные ступицы внутреннего и наружного первичных валов. А в «мокром» тоже два комплекта сцеплений, но многодисковых (семь, девять, одиннадцать дисков) и помещенных в масляную ванну. Здесь важно отметить еще вот что: регулировки, в частности выставление «в ноль» одного диска сцепления в среднее положение по отношению ко второму диску – процесс очень муторный. Даже у специалистов на это уходит порой немало времени: иногда по нескольку часов работы отверткой, ключами, щупами. И делать это приходится порой частенько.
Про надежность DSG ничего хорошего, к сожалению, сказать нельзя… Механика здесь в целом явно надежнее. Как и многие гидравлические «автоматы» и «роботы». Регулярно в прессе появляются сообщения, что производители «опять столкнулись с проблемой трансмиссий DSG и устраняют очередные «детские проблемы». И хочется задать вопрос – а сколько этих «детских проблем» еще будет? И кстати – японцы в «грехе» производства DSG пока что не замечены. ..
..
- Игорь Козлов
коробка передачроботизированная коробкатрансмиссияToyotaVolkswagen
Гибридная гидростатическая трансмиссия позволяет роботам с человеческой грацией и точностью
Предоставлено: Исследование Диснея.Новый тип гидростатической трансмиссии, сочетающий в себе гидравлические и пневматические линии, может безопасно и точно управлять манипуляторами роботов, обеспечивая им деликатность, необходимую для захвата яйца, не разбивая его.
Эта трансмиссия почти не имеет трения и люфта, обеспечивая исключительную точность при выполнении таких задач, как заправка нити в швейную иглу.
Гибридная трансмиссия позволяет вдвое сократить количество громоздких гидравлических линий, которые потребовались бы для полностью гидравлической системы. Таким образом, роботизированные конечности можно сделать легче и меньше, сказал Джон П. Уитни, доцент кафедры машиностроения и промышленной инженерии в Северо-восточном университете, который руководил разработкой трансмиссии, будучи младшим научным сотрудником Disney Research.![]()
Уитни и ее коллеги из Disney Research, Католического университета Америки и Университета Карнеги-Меллона расскажут о новой трансмиссии и гуманоидном роботе верхней части тела, который они построили с ее помощью, на конференции IEEE по робототехнике и автоматизации, ICRA 2016, 17 мая в Стокгольм, Швеция.
«Передача обеспечивает нашему роботу невероятно плавное и быстрое движение, а также позволяет реалистично взаимодействовать с людьми и обращаться с хрупкими объектами», — сказала соавтор Джессика Ходжинс, вице-президент Disney Research и профессор робототехники в Университет Карнеги-Меллона. «На данный момент роботом дистанционно управляет человек-оператор, но мы ожидаем такого же уровня механических характеристик, как только движения будут автоматизированы».
Уитни сказала, что роботизированное соединение обычно имеет два гидравлических цилиндра, уравновешенных друг против друга. Но в этой последней конструкции исследователи соединили каждый цилиндр, заполненный водой, с цилиндром, наполненным воздухом. Пневматический цилиндр служит в качестве пневматической пружины постоянной силы, обеспечивая необходимое усилие предварительного натяжения, позволяя шарниру двигаться в обоих направлениях с вдвое меньшим количеством громоздких гидравлических линий.
Но в этой последней конструкции исследователи соединили каждый цилиндр, заполненный водой, с цилиндром, наполненным воздухом. Пневматический цилиндр служит в качестве пневматической пружины постоянной силы, обеспечивая необходимое усилие предварительного натяжения, позволяя шарниру двигаться в обоих направлениях с вдвое меньшим количеством громоздких гидравлических линий.
Исследователи использовали новую трансмиссию для создания простого робота-гуманоида с двумя руками, со стереокамерами, установленными в голове, передающими видеосигнал оператору с надетым на голову дисплеем. Руки соединены с идентичной контрольной фигурой, спрятанной за стеной, чтобы можно было использовать робота для исследования взаимодействия человека и робота.
«Эта технология позволила нам создать легкие, быстрые и ловкие роботы-манипуляторы», — сказал Уитни. «У них невероятно реалистичная природа, предлагающая сочетание небольшой массы, высокой скорости и точного движения, невиданного ранее».
Роботы, использующие эту технологию, идеально подходят для естественного и реалистичного взаимодействия с людьми. При дистанционном управлении низкое трение и отсутствие люфта позволяют трансмиссии точно передавать контактные усилия оператору, обеспечивая высокоточное дистанционное осязание.
При дистанционном управлении низкое трение и отсутствие люфта позволяют трансмиссии точно передавать контактные усилия оператору, обеспечивая высокоточное дистанционное осязание.
Помимо Уитни и Ходжинса, в исследовательскую группу входили Джон Марс из Disney Research, разработавший камеру и головной дисплей, и Тяньяо Чен, научный сотрудник Католического университета Америки, который в то время разрабатывал роботизированные руки. стажер в Disney Research.
Дополнительная информация: «Гибридная гидростатическая трансмиссия и человек — безопасный тактильный робот телеприсутствия-бумага» [PDF, 3,47 МБ]
Предоставлено Исследования Диснея
Цитата : Гибридная гидростатическая трансмиссия позволяет роботам с человеческой грацией и точностью (12 мая 2016 г.) получено 12 декабря 2022 г. с https://phys.org/news/2016-05-hybrid-hydrostatic-transmission-enables-robots.html
Этот документ защищен авторским правом. Помимо любой добросовестной сделки с целью частного изучения или исследования, никакие
часть может быть воспроизведена без письменного разрешения. Контент предоставляется только в ознакомительных целях.
Контент предоставляется только в ознакомительных целях.
Роботы берут на себя сложные задачи по передаче и распределению
Скачать статью в формате PDF
Поделиться этой статьей:
Автор: Брент Баркер21 пьеса, адаптирующая старый словацкий термин для принудительного труда, rabota . Сделанные из «химического теста», его роботы исчезли в анналах научной фантастики. Но этот термин прижился и вошел в английский язык в 1923 году.
Сегодняшние роботы — это что угодно, только не химическое тесто, и они специализируются на выполнении задач, слишком опасных, громоздких, удаленных или сложных для человека. Они варьируются от больших многоруких роботов, используемых при сборке автомобилей, до роботов для обезвреживания бомб, используемых полицией и военными, до нанороботов, используемых в медицине для доставки лекарств через кровоток.
Уже более двух десятилетий электроэнергетическая промышленность исследует потенциал роботов для решения важнейших задач. В области передачи и распределения EPRI исследовал роботов, способных:
В области передачи и распределения EPRI исследовал роботов, способных:
- Скольжение по проводам экрана для осмотра воздушных линий электропередачи
- Маневры внутри подземных хранилищ для осмотра электрических кабелей
- Забраться на подвесные фарфоровые, стеклянные и полимерные изоляторы и осмотреть их
- Осмотреть компоненты подстанции и защитить их от злоумышленников
- Проплыть через масло внутри больших трансформаторов, чтобы осмотреть сердечник
Роботы для линий электропередач
Воздушные линии электропередач относятся к числу наиболее широко рассредоточенных активов электроэнергетических компаний. В одних только Соединенных Штатах они преодолевают десятки тысяч миль, многие из них в отдаленных районах. Осмотр необходим один или два раза в год для оценки старения компонентов и наличия полосы отчуждения. Исторически сложилось так, что бригады проводят визуальный осмотр или используют камеры и другие инструменты, когда они проходят по полосе отчуждения, взбираются на сооружения или путешествуют на вертолетах. Несмотря на то, что эта работа имеет решающее значение для надежности системы, она требует много времени, средств и иногда опасна.
Несмотря на то, что эта работа имеет решающее значение для надежности системы, она требует много времени, средств и иногда опасна.
После почти двух десятилетий исследований и испытаний EPRI разработала автономного робота для проверки линий электропередачи под названием «Ti». Он скользит по экранирующему проводу над проводниками под напряжением, преодолевая в среднем 3 мили в день. Системы обхода помогают Ти обходить препятствия и опоры ЛЭП.
«Мы развертываем Ti в Огайо на 75-мильном сегменте 138-киловольтной линии электропередачи, эксплуатируемой American Electric Power», — сказал Эндрю Филлипс, вице-президент EPRI по инфраструктуре передачи и распределения. «Когда он будет запущен и запущен в начале 2019 года, это будет первый в мире полностью автономный робот для линий электропередач. Он черпает энергию из электромагнитных полей линии электропередачи в ключевых точках для зарядки своих аккумуляторов, скользит вдоль линии, делая фотографии и различные показания, и отправляет их в режиме реального времени рабочим. Он может завершить 75-мильную линию за пять недель».
Он может завершить 75-мильную линию за пять недель».
Визуальные и инфракрасные камеры высокого разрешения Ti проверяют полосы отчуждения и компоненты, а также определяют расстояния между линиями электропередач и деревьями. Его детекторы электромагнитных помех могут обнаруживать разряды, такие как искрение. Другие инструменты, запланированные для будущего развертывания: датчики молний, датчики вибрации для ветреных районов и датчики тока утечки для прибрежных районов, где соль может загрязнить компоненты. Если требуется скорость, например, чтобы точно определить источник недавнего отключения, Ti может двигаться со скоростью до 5 миль в час.
«Мы работаем над конфигурацией, похожей на железнодорожную развязку, которая позволит роботу перемещаться на другую линию электропередачи, когда он проходит через подстанцию», — сказал Филлипс. «Это значительно повысит его полезность и ценность».
EPRI изучает затраты и преимущества Ti, такие как повышение безопасности и качества данных. Делая паузу в одном месте, робот может делать снимки лучшего качества, чем снимки, сделанные с вертолета, летящего со скоростью от 30 до 60 миль в час. «Ti может устранить необходимость в подробных проверках вертолетов, снижая риск», — сказал Филлипс.
Делая паузу в одном месте, робот может делать снимки лучшего качества, чем снимки, сделанные с вертолета, летящего со скоростью от 30 до 60 миль в час. «Ti может устранить необходимость в подробных проверках вертолетов, снижая риск», — сказал Филлипс.
Роботы-изоляторы передачи
Исследования роботов-изоляторов обусловлены необходимостью снижения рисков безопасности, связанных с дефектами полимерных изоляторов, длина которых составляет от 3 до 15 футов в зависимости от напряжения линии электропередачи. «Сегодня полимеры являются преобладающим изоляционным материалом, и проблема в том, что вы не можете увидеть внутренний дефект, влияющий на электрические характеристики. Вам нужен электрический тестер, который имеет прямой контакт с изолятором», — сказала старший менеджер проекта EPRI Эрика Уиллис.
EPRI разработала и выпустила на рынок инструмент для работы с некерамическим изолятором Live-Line, который может выявлять дефекты проводимости. Однако рабочие должны вручную применять инструмент с помощью горячей палки. Держать 10-футовую горячую палку из стекловолокна, которая раскачивается под весом инструмента на конце, может быть тяжелым испытанием для тела, особенно если рабочий находится высоко в автовышке, которую бьет ветер.
Держать 10-футовую горячую палку из стекловолокна, которая раскачивается под весом инструмента на конце, может быть тяжелым испытанием для тела, особенно если рабочий находится высоко в автовышке, которую бьет ветер.
«Концепция EPRI представляет собой робота, интегрированного с инструментом Live-Line для работы с некерамическим изолятором. Он ползет вверх по изолятору, собирает показания с помощью инструмента, затем ползет вниз, где вы вытаскиваете инструмент и получаете свои результаты. Он говорит вам, приемлема ли единица», — сказал Уиллис.
Когда EPRI провела лабораторные испытания робота с 10 различными конфигурациями изоляторов, измерения робота оказались более последовательными, чем измерения вручную. «Но необходимо проделать большую работу, прежде чем робота можно будет с уверенностью применять в полевых условиях для всех конструкций изоляторов», — сказал Уиллис.
EPRI работает с Юго-западным научно-исследовательским институтом, чтобы адаптировать этого робота для работы с фарфоровыми изоляторами. Другие улучшения, находящиеся в стадии разработки, включают удлинение рук и кистей, увеличение длины робота и включение усовершенствованных датчиков для улучшения качества данных и скорости обработки. «Мы можем упаковать гораздо больше в маленького робота и поставить камеры на каждую руку», — сказал Уиллис.
Другие улучшения, находящиеся в стадии разработки, включают удлинение рук и кистей, увеличение длины робота и включение усовершенствованных датчиков для улучшения качества данных и скорости обработки. «Мы можем упаковать гораздо больше в маленького робота и поставить камеры на каждую руку», — сказал Уиллис.
Подземные кабельные роботы
Поскольку большинство частей подземных кабельных систем находятся под землей, визуальные осмотры проводятся в отдельных точках: внутри подземных хранилищ, известных как смотровые люки , на подстанциях или сооружениях на стыках с воздушными линиями. Люки являются уязвимыми местами, требующими регулярных осмотров для оценки состояния кабелей, кабельных сращиваний, соединений, опор и другого оборудования.
Ограниченное пространство внутри люков затрудняет тщательный осмотр. Чтобы не посылать инспекторов в люк, некоторые коммунальные службы будут маневрировать камерой с источником света с поверхности.
EPRI анализирует роботизированные методы осмотра подземных кабелей электропередач для повышения безопасности рабочих и сокращения простоев. «Мы изучаем коммерчески доступные системы, их ограничения и то, как их можно адаптировать для использования подземных кабелей», — сказал инженер и научный сотрудник EPRI Дэвид Куммер. Проблемы включают четкость изображения, навигацию, возможность извлечения робота и мощность сигнала внутри люка.
«Мы изучаем коммерчески доступные системы, их ограничения и то, как их можно адаптировать для использования подземных кабелей», — сказал инженер и научный сотрудник EPRI Дэвид Куммер. Проблемы включают четкость изображения, навигацию, возможность извлечения робота и мощность сигнала внутри люка.
«Мы оцениваем дроны для осмотра соединений и других компонентов в люках», — сказал Куммер. «Мы завершили тест, чтобы определить возможности визуализации и понять проблемы при маневрировании в люке. Затем мы протестируем имеющиеся в продаже беспилотники, предназначенные для работы в ограниченном пространстве». Команда Куммера использует транспортный контейнер для создания имитации люка для тестирования этих систем.
EPRI исследует системы, в которых трехфазные кабели находятся внутри стальной трубы и находятся под давлением масла. «Мы оцениваем робота, который может перемещаться внутри трубы и через нефть для осмотра кабеля», — сказал Куммер. Некоторые производители выпускают роботов, предназначенных для осмотра газовых или водопроводных линий, что ставит вопрос о том, могут ли они эффективно перемещаться по нефти и по трубе с кабелем.
На объекте EPRI в Шарлотте Куммер и его команда построили прототип робота и макеты труб с неисправными кабелями. «Робот имеет размеры 2 дюйма в высоту, 11 дюймов в длину и 4 дюйма в ширину, несет две камеры, светодиодные фонари и использует магнитные колеса, чтобы удерживать себя внутри трубы, чтобы он не касался кабеля», — сказал он. «В нашей лаборатории мы вручную протащили робота через 20-футовые участки трубы с помощью макетов кабелей, чтобы оценить ограничения изображения. Мы выявили многие, но не все дефекты, заложенные в кабеле», — сказал Куммер.
EPRI продолжает оценивать эти и другие технологии, включая подводных роботов.
Роботы для обеспечения безопасности подстанции
Поскольку безопасность подстанции по-прежнему в значительной степени зависит от ворот, охранников, освещения и детекторов движения для предотвращения краж, вандализма и терроризма, EPRI изучает роботизированные технологии для повышения безопасности.
«Сегодня в продаже есть как минимум полдюжины автономных роботов. EPRI работает с коммунальными предприятиями над лабораторными и полевыми испытаниями на действующих подстанциях. Лишь немногие пригодны для непрерывной круглосуточной работы 365 дней в году на открытом воздухе, надежно работая морозными зимами и жарким летом в таких разных местах, как Калифорния, Техас, Миннесота и Нью-Йорк», — сказал EPRI Senior. Менеджер программы Кевин Берент.
EPRI работает с коммунальными предприятиями над лабораторными и полевыми испытаниями на действующих подстанциях. Лишь немногие пригодны для непрерывной круглосуточной работы 365 дней в году на открытом воздухе, надежно работая морозными зимами и жарким летом в таких разных местах, как Калифорния, Техас, Миннесота и Нью-Йорк», — сказал EPRI Senior. Менеджер программы Кевин Берент.
Местность так же важна, как и погода. По словам Берента, «мы ищем грубых и выносливых роботов; может передвигаться по крупному гравию, грязи, снегу и грязи; и может преодолевать труднопроходимую местность с минимальным обслуживанием».
Техническое обслуживание, особенно в удаленных районах без персонала, может быть затруднено. «У многих роботов есть батареи, которые необходимо заменить. Некоторые аккумуляторы можно перезаряжать, но в моделях, которые мы видели, надежной технологии зарядки пока нет», — сказал Берент.
Мобильность и размер помогут отпугнуть злоумышленников. «Исследования показывают, что что-то движущееся вокруг и такое большое, как газонокосилка, может иметь сдерживающий эффект, снижая уровень преступности. Это не может быть похоже на игрушку. Если робот может напрямую атаковать злоумышленника в режиме реального времени с помощью микрофона, динамика, видеокамер и мигающих огней — тем лучше», — сказал Берент.
Это не может быть похоже на игрушку. Если робот может напрямую атаковать злоумышленника в режиме реального времени с помощью микрофона, динамика, видеокамер и мигающих огней — тем лучше», — сказал Берент.
Многоцелевые роботы могут улучшить экономическое обоснование безопасности подстанции. «Робот-охранник, использующий инфракрасную камеру для обнаружения проникновения в ночное время, может использовать ту же камеру для проверки того, не перегревается ли оборудование больше, чем должно быть», — сказал Берент. «Мы рассматриваем несколько вариантов. Можно ли использовать робота для обслуживания? Можем ли мы добавить датчики для обнаружения утечек гексафторида серы?»
Роботы для осмотра подстанции
Роботы потенциально полезны для осмотра подстанции, включая визуальный осмотр и сенсорный мониторинг состояния оборудования, например, температуры, наличия коронных разрядов, утечек масла и гексафторида серы. В 2019 году главный технический руководитель EPRI Пурви Патель определит области применения и преимущества, а также рассмотрит коммерчески доступные технологии.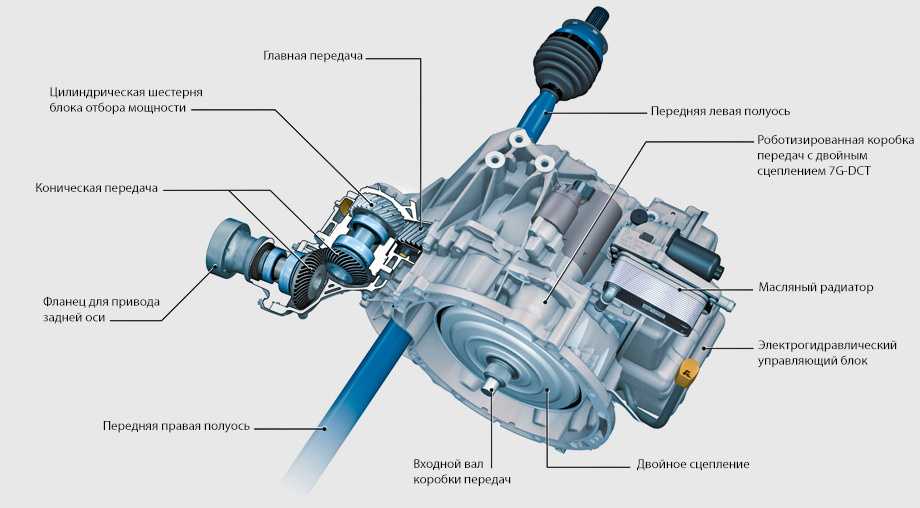
«После определения перспективных технологий мы планируем провести лабораторные демонстрации на нашей новой 138-киловольтной испытательной подстанции, а затем демонстрации в полевых условиях», — сказал старший технический руководитель EPRI Люк Ван дер Зел. «Цель состоит в том, чтобы оценить полезную нагрузку датчиков и производительность робота». Следующим шагом является разработка технической спецификации и руководства по применению коммунальных услуг.
Роботы-трансформеры
Роботы подстанции также могут использоваться для осмотра внутренних частей больших трансформаторов. Сегодняшние проверки имеют существенные недостатки. «Один из подходов предполагает опускание камеры или эндоскопа внутрь трансформатора, но диапазон доступа ограничен», — сказал Патель.
Второй подход — слить трансформаторное масло — десятки тысяч галлонов — и отправить человека внутрь. После осмотра масло заменяется. «Это требует много времени, потому что включает в себя вход в замкнутое пространство и переработку масла», — сказал Патель.