Система динамической стабилизации автомобиля (ESP) — Пассивная и активная безопасность
| Вы можете задать интересующие вас вопросы по теме представленной статьи, оставив свой комментарий внизу страницы. Вам ответит заместитель генерального директора автошколы «Мустанг» по учебной работе Преподаватель высшей школы, кандидат технических наук Кузнецов Юрий Александрович |
Система динамической стабилизации автомобиля (ESP)
Задача ESP — контроль поперечной динамики автомобиля и предотвращение срыва автомобиля в занос и боковое скольжение посредством компьютерного управления моментами силы колес (одновременно одного или нескольких).
Иногда эту систему называют «противозаносной» или «системой поддержания курсовой устойчивости». Она способна компенсировать ошибки водителя, нейтрализуя и исключая занос, когда контроль над автомобилем уже потерян.
Эксперты называют систему ESP самым важным изобретением в сфере автомобильной безопасности после ремней безопасности. Она обеспечивает водителю лучший контроль за поведением автомобиля, следя за тем, чтобы он перемещался в том направлении, куда указывает поворот руля. По данным американского Страхового института дорожной безопасности (IIHS) и Национального управления безопасностью движения на трассах NHTSA (США), примерно одна треть смертельных аварий могла бы быть предотвращена системой ESP, если бы ей были оснащены все автомобили.
Главный контроллер ESP — это пара микропроцессоров, каждый из которых имеет по 56 Кбайт памяти. Система позволяет, например, считывать и обрабатывать значения, выдаваемые датчиками скорости вращения колес, датчиком положения рулевого колеса и датчиком давления в тормозной системе с 20 миллисекундным интервалом.
Но основная информация поступает с двух специальных датчиков: угловой скорости относительно вертикальной оси и поперечного ускорения (иногда это устройство называют G-сенсор). Именно они фиксируют возникновение бокового скольжения на вертикальной оси, определяют его величину и дают дальнейшие распоряжения. В каждый момент ESP знает, с какой скоростью едет автомобиль, на какой угол повёрнут руль, какие обороты у двигателя, есть ли занос и так далее.
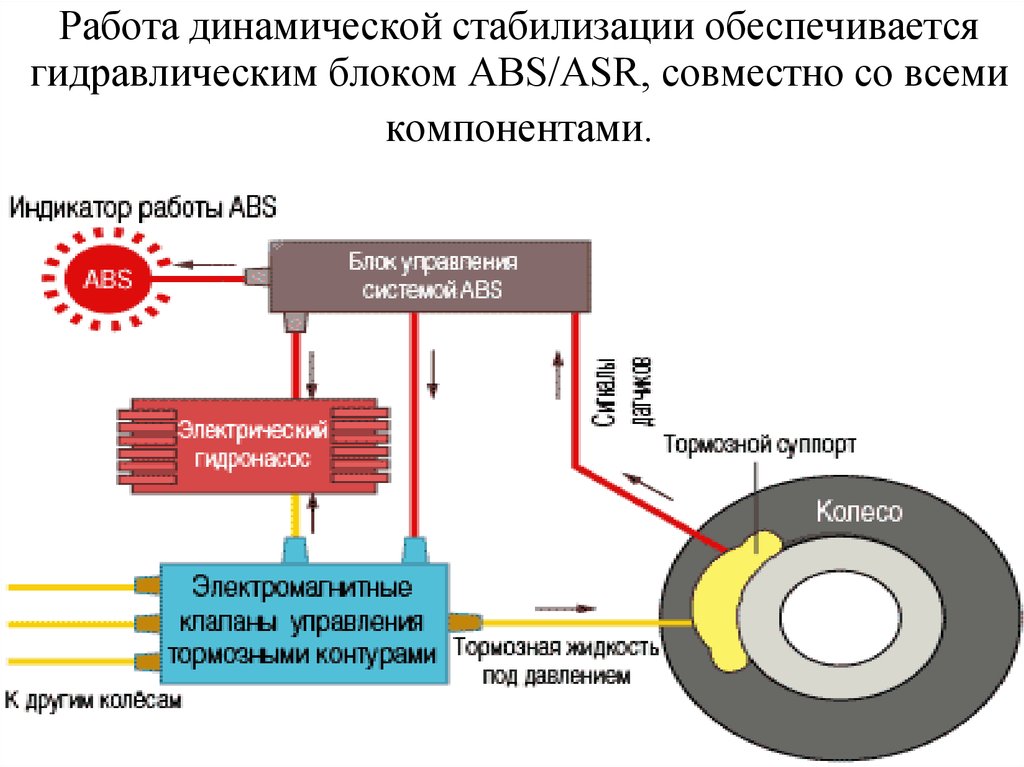
Систему ESP можно рассматривать как расширенный вариант рассмотренной ранее антиблокировочной системы (ABS). Многие узлы ESP объединены с системой ABS, но, вдобавок к её компонентам, ESP требует наличия таких компонентов, как датчик положения руля и акселерометр (прибор, измеряющий разность между абсолютным ускорением объекта и гравитационным ускорением, точнее ускорением свободного падения), следящий за реальным поворотом автомобиля.
При несоответствии показаний акселерометра показаниям датчика поворота руля, система применяет торможение одного (или нескольких) из колёс машины для того, чтобы предотвратить начинающийся занос.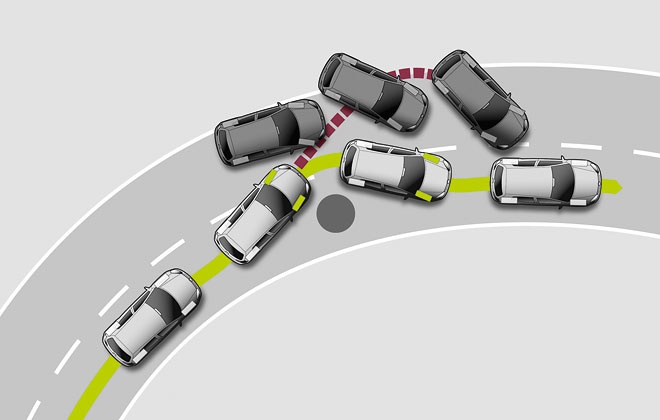 Например, из-за большой скорости при прохождении правого поворота передние колеса сносит с заданной траектории в направлении действия сил инерции, т.е. по радиусу большему, чем радиус поворота. ESP в этом случае притормаживает заднее колесо, идущее по внутреннему радиусу поворота, придавая автомобилю большую поворачиваемость и направляя его в поворот. Одновременно с притормаживанием колес ESP снижает обороты двигателя. Если при прохождении поворота происходит занос задней части автомобиля, ESP активизирует тормоз левого переднего колеса, идущего по наружному радиусу поворота. Таким образом, появляется момент противовращения, исключающий боковой занос. Когда скользят все четыре колеса, ESP самостоятельно решает, тормозные механизмы каких колес должны вступить в работу. Работает система на любых скоростях и в любых режимах движения.
Например, из-за большой скорости при прохождении правого поворота передние колеса сносит с заданной траектории в направлении действия сил инерции, т.е. по радиусу большему, чем радиус поворота. ESP в этом случае притормаживает заднее колесо, идущее по внутреннему радиусу поворота, придавая автомобилю большую поворачиваемость и направляя его в поворот. Одновременно с притормаживанием колес ESP снижает обороты двигателя. Если при прохождении поворота происходит занос задней части автомобиля, ESP активизирует тормоз левого переднего колеса, идущего по наружному радиусу поворота. Таким образом, появляется момент противовращения, исключающий боковой занос. Когда скользят все четыре колеса, ESP самостоятельно решает, тормозные механизмы каких колес должны вступить в работу. Работает система на любых скоростях и в любых режимах движения.
Кроме того, в автомобилях, оборудованных автоматической КПП с электронным управлением, ESP способна даже корректировать работу трансмиссии, то есть переключаться на более низкую передачу или на «зимний» режим, если он предусмотрен.
Существует мнение, что опытному водителю, способному ездить на пределе возможностей, эта система мешает. Такие ситуации действительно редко, но могут возникать — например, когда для выхода из заноса надо поддать газа, а электроника сделать этого не даёт — «душит» движок.
Кроме того, в некоторых случаях может оказаться полезным выключить систему ESP, чтобы колеса могли вращаться с пробуксовкой:
— при движении по глубокому снегу или влажному грунту;
— при раскачке автомобиля вперед-назад при застревании в снегу;
— при движении с установленными цепями противоскольжения.
Во многих автомобилях, оборудованных ESP, предусмотрена возможность её принудительного отключения. А на некоторых моделях система допускает небольшие заносы и скольжения, давая водителю немного похулиганить, вмешиваясь, только если ситуация становится действительно критической.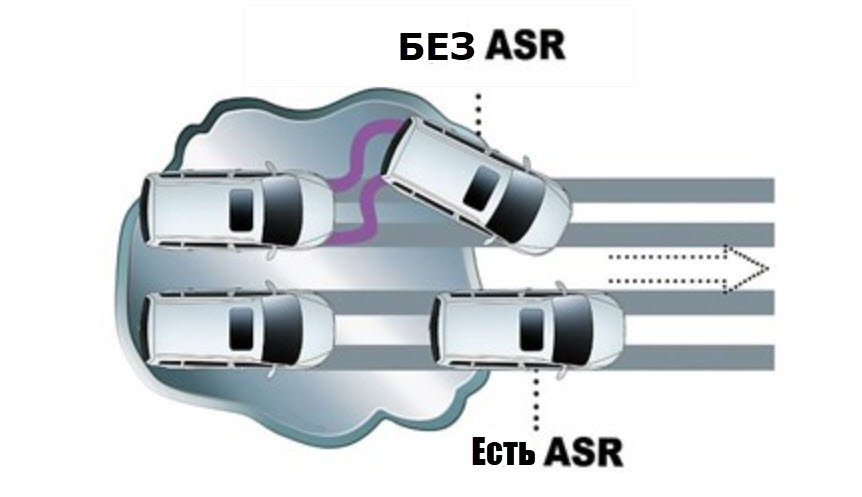
Система ESP может иметь следующие дополнительные функции:
— система предотвращения опрокидывания;
— система предотвращения столкновения;
— система стабилизации автопоезда;
— система повышения эффективности тормозов при нагреве;
— система удаления влаги с тормозных дисков;
— и др.
Система предотвращения опрокидывания ROP (Roll Over Prevention) стабилизирует движение автомобиля при угрозе опрокидывания. Предотвращение опрокидывания достигается за счет уменьшения поперечного ускорения путем подтормаживания передних колес и снижения крутящего момента двигателя. Дополнительное давление в тормозной системе создается с помощью активного усилителя тормозов.
Система предотвращения столкновения (Braking Guard) может быть реализована в автомобиле, оснащенном адаптивным круиз-контролем.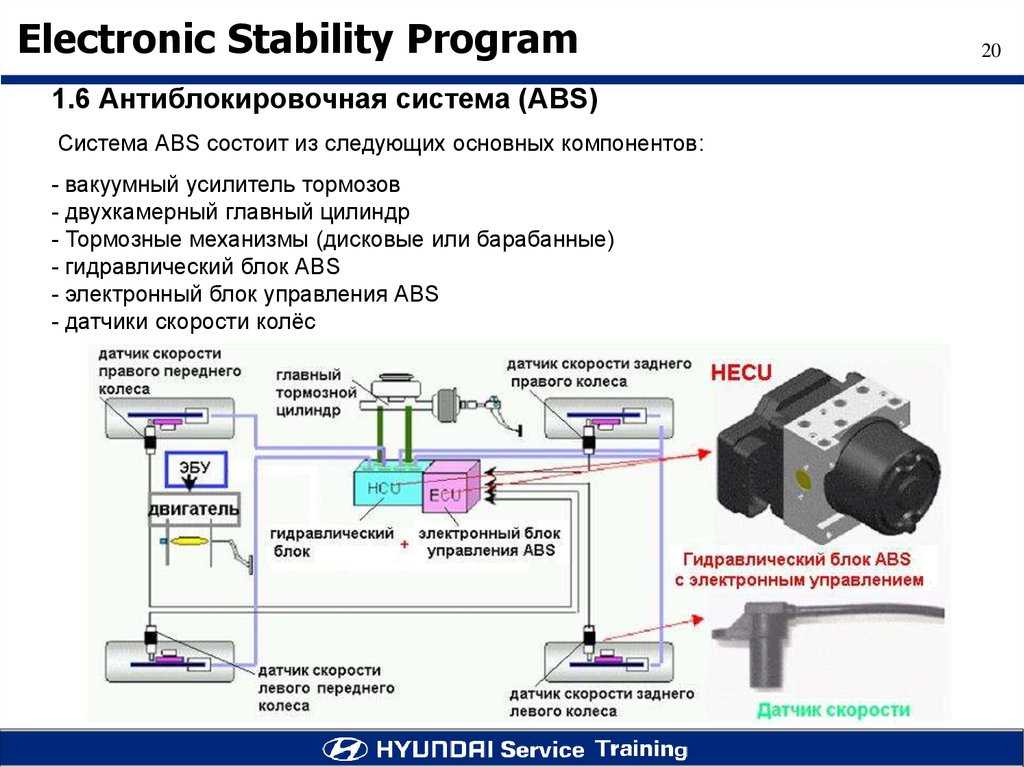 Система предотвращает опасность столкновения с помощью визуальных и звуковых сигналов, а в критической ситуации — путем нагнетания давления в тормозной системе (автоматического включения насоса обратной подачи).
Система предотвращает опасность столкновения с помощью визуальных и звуковых сигналов, а в критической ситуации — путем нагнетания давления в тормозной системе (автоматического включения насоса обратной подачи).
Система стабилизации автопоезда может быть реализована в автомобиле, оборудованным тягово-сцепным устройством. Система предотвращает рыскание прицепа при движении автомобиля, которое достигается за счет торможения колес или снижения крутящего момента.
Система повышения эффективности тормозов при нагреве FBS(Fading Brake Support, другое наименование — Over Boost) предотвращает недостаточное сцепление тормозных колодок с тормозными дисками, возникающее при нагреве, путем дополнительного увеличения давления в тормозном приводе.
Система удаления влаги с тормозных дисков активируется на скорости свыше 50км/ч и включенных стеклоочистителях. Принцип работы системы заключается в кратковременном повышении давления в контуре передних колес, за счет чего тормозные колодки прижимаются к дискам и происходит испарение влаги.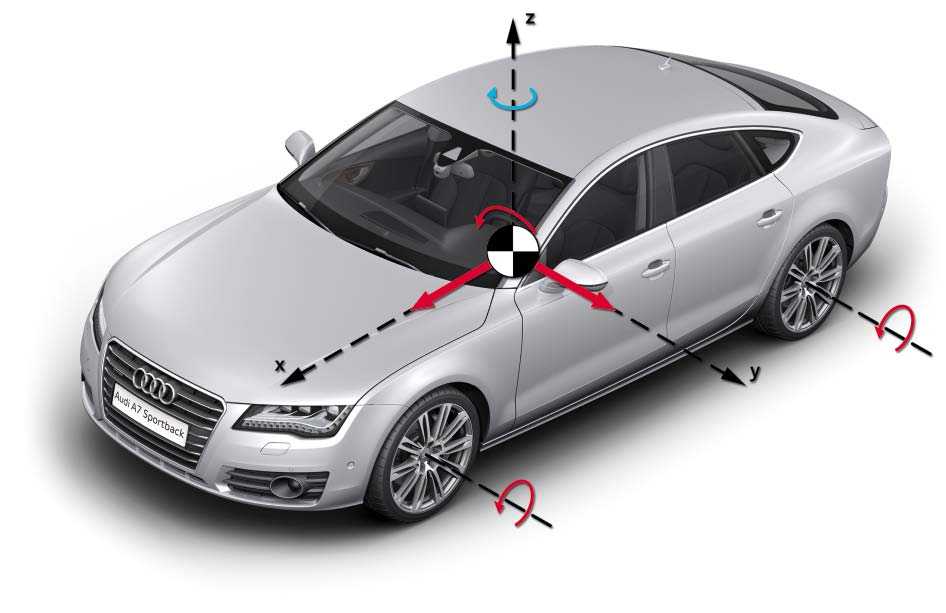
Система динамической стабилизации у разных автопроизводителей называется по разному. ESP – самое распространенное название. Кроме того, используются следующие аббревиатуры:
ASC (Active Stability Control) и ASTC (Active Skid and Traction Control MULTIMODE), используется в автомобилях: Mitsubishi
AdvanceTrac, используется в автомобилях: Lincoln, Mercury.
CST (Controllo Stabilità, используется в автомобилях: Ferrari.
DSC (Dynamic Stability Control), используется в автомобилях: BMW, Ford (только в Австралии), Jaguar, Land Rover, Mazda, MINI.
DSTC (Dynamic Stability and Traction Control, используется в автомобилях: Volvo.
ESC (Electronic Stability Control), используется в автомобилях: Chevrolet, Hyundai, Kia.
ESP (Elektronisches Stabilitätsprogramm), используется в автомобилях: Audi, Bentley, Bugatti, Chery, Chrysler, Citroën, Dodge, Daimler, Fiat, Holden, Hyundai, Jeep, Kia, Lamborghini, Mercedes Benz,Opel, Peugeot, Proton, Renault, Saab, Scania, SEAT, Škoda, Smart, Suzuki, Vauxhall, Volkswagen.
IVD (Interactive Vehicle Dynamics, используется в автомобилях: Ford.
MSP (Maserati Stability Program, используется в автомобилях: Maserati.
PCS (Precision Control System, используется в автомобилях: Oldsmobile (производство которых прекращено в 2004 году).
PSM (Porsche Stability Management, используется в автомобилях: Porsche.
RSC (AdvanceTrac with Roll Stability Control, используется в автомобилях: Ford.
StabiliTrak, используется в автомобилях: Buick, Cadillac, Chevrolet (на Corvette называется Active Handling), GMC Truck, Hummer, Pontiac, Saab, Saturn.
VDC (Vehicle Dynamic Control), используется в автомобилях: Alfa Romeo, Fiat, Infiniti, Nissan, Subaru.
VDIM (Vehicle Dynamics Integrated Management) с VSC (англ. Vehicle Stability Control), используется в автомобилях: Toyota, Lexus.
Vehicle Stability Control), используется в автомобилях: Toyota, Lexus.
VSA (Vehicle Stability Assist), используется в автомобилях: Acura, Honda, Hyundai.
Безусловно, ESP высокоэффективная система, но ее возможности не безграничны. Причиной этого являются законы физики, изменить которые электроника не в силах. Поэтому если радиус поворота слишком мал или скорость в повороте превышает разумные границы, даже самая совершенная программа стабилизации движения здесь не поможет.
Категория: Пассивная и активная безопасность | Популярность: 23311 | Оценка: 2.49
Добавить комментарийКомментарии:
Система динамической стабилизации VSA Honda Insight (Хонда Инсайт)
Система динамической стабилизации (VSA), или Vehicle Stability Assist в автомобиле Honda Insight некоторых комплектаций помогает поддерживать курсовую устойчивость, устраняя избыточную или недостаточную маневренность автомобиля. Кроме того, данная система выполняет функцию противобуксовочной системы, уменьшая или полностью устраняя буксование ведущих колес при разгоне на скользких или засыпанных рыхлым материалом дорогах. Работа системы основана на индивидуальном управлении тормозными механизмами отдельных колес, а также на автоматическом регулировании мощности двигателя.
Кроме того, данная система выполняет функцию противобуксовочной системы, уменьшая или полностью устраняя буксование ведущих колес при разгоне на скользких или засыпанных рыхлым материалом дорогах. Работа системы основана на индивидуальном управлении тормозными механизмами отдельных колес, а также на автоматическом регулировании мощности двигателя.
При активном состоянии системы VSA вы можете почувствовать, что реакция автомобиля на нажатие педали акселератора несколько иная, чем при обычном вождении. Во время работы системы мигает индикатор VSA.
Система VSA не в состоянии поддерживать курсовую устойчивость автомобиля при абсолютно любых условиях движения и не осуществляет полного контроля над тормозной системой автомобиля. Поэтому водитель по-прежнему полностью отвечает за безопасность движения и не долженпревышать скорость при маневрировании.
Индикатор выключения системы динамической стабилизации (VSA) Хонда Инсайт
При отключении системы VSA появляется соответствующий индикатор.
Индикатор системы динамической стабилизации автомобиля Honda Insight
Индикатор VSA мигает, когда система динамической стабилизации находится в активном состоянии.
Если во время вождения светится индикатор VSA, необходимо съехать на обочину дороги в безопасное место и выключить двигатель. Восстановите исходное состояние системы, вновь запустив двигатель. Если индикатор VSA не гаснет через короткое время после пуска двигателя или вновь включается во время движения, то автомобиль должен быть доставлен в сервисный центр.
Если индикатор не включается на короткое время при повороте ключа зажигания в положение ON (II), то, по всей вероятности, система неисправна. Вам следует незамедлительно обратиться на сервисную станцию.
При включении системы VSA на многофункциональный дисплей выводится индикатор , который может сопровождаться текстом «CHECK SYSTEM» (Проверьте систему).
При неработающей системе VSA автомобиль может продолжать движение, нормально поворачивать и тормозить, однако дополнительные функции противобуксовочной системы и системы поддержания курсовой устойчивости выполняться не будут.
Выключатель системы VSA Honda Insight
В определенных неблагоприятных условиях при застревании автомобиля на влажной почве или слякоти выключение системы VSA может способствовать более легкому вызволению автомобиля. При выключении системы VSA противобуксовочная система также выключается. Выключать систему следует только в том случае, если попытки вызволить автомобиль с включенной системой VSA не увенчались успехом.
После освобождения автомобиля немедленно включите систему VSA. Не рекомендуется вождение автомобиля с выключенной системой VSA и системой регулирования тяговой силы.
Выключатель расположен под боковой вентиляционной решеткой со стороны водителя. Чтобы отключить или включить систему VSA, нажмите на выключатель и удерживайте его до звукового сигнала. Если система выключена, появляется индикатор VSA. Повторно нажмите и удерживайте выключатель для активации системы VSA.
Чтобы отключить или включить систему VSA, нажмите на выключатель и удерживайте его до звукового сигнала. Если система выключена, появляется индикатор VSA. Повторно нажмите и удерживайте выключатель для активации системы VSA.
Система VSA включается при каждом пуске двигателя, независимо от того, была ли он отключена до этого водителем.
Как влияет типоразмер шин Хонда Инсайт на работу системы динамической стабилизации
Установка на автомобиль колес и шин, не предусмотренных конструкцией Honda Insight, может привести к неправильной работе системы динамической стабилизации. Заменяя шины, проследите, чтобы они были того же типа и размера, что и оригинальные шины.
Заменяя летние шины на зимние, также проследите за тем, чтобы они были того же типа и размера, что и оригинальные. При эксплуатации автомобиля в зимних условиях соблюдайте те же меры безопасности, что и при вождении автомобиля, не оснащенного системой динамической стабилизации.
Наши рекомендации для ознакомления
Антиблокировочная система (ABS) автомобиля Хонда Инсайт
Антиблокировочная система ABS (или anti-lock brake system) предотвращает полную блокировку тормозящих колес, чтобы избежать потери их сцепления с поверхностью дороги; данная система как бы применяет известный всем водителям прием многократного попеременного нажатия и отпускания тормозной педали, однако делает это со скоростью, недоступной даже для водителей с достаточно большим опытом.
Тормозная система автомобиля Хонда Инсайт
Все четыре колеса автомобиля Honda Insight оснащены дисковыми тормозными механизмами. Тормозной гидравлический привод оборудован усилителем, который снижает необходимое усилие нажатия на тормозную педаль. Антиблокировочная система обеспечивает сохранение управляемости автомобиля при интенсивном торможении.
Автоматическая остановка холостого хода (система авто-стоп) Honda Insight
Для максимальной экономии топлива автомобиль Хонда Инсайт оснащен функцией автоматической остановки холостого хода, или авто-стоп. В зависимости от погодных условий и способа управления двигатель автоматически отключается после остановки автомобиля.Двигатель автоматически отключается: Во время остановки автомобиля с положением D рычага селектора передач, а также при нажатии на педаль тормоза. Двигатель отключается также при резком снижении скорости ниже 11 км/ч путем нажатия на педаль тормоза.
В зависимости от погодных условий и способа управления двигатель автоматически отключается после остановки автомобиля.Двигатель автоматически отключается: Во время остановки автомобиля с положением D рычага селектора передач, а также при нажатии на педаль тормоза. Двигатель отключается также при резком снижении скорости ниже 11 км/ч путем нажатия на педаль тормоза.
Клавиши для ручного переключения передач (подрулевые лепестки) в Хонда Инсайт
Клавиши для ручного переключения передач, или, как они еще называтся подрулевые лепестки устанавливаются для некоторых комплектаций автомобиля Honda Insight. Нажатие на клавишу для ручного переключения передач во время движения осуществляет переход с автоматической трансмиссии (СVT) на ручное управление. При помощи перемещения клавиш ручного переключения вверх или вниз происходит пошаговая смена семи передач.
ВЕВДЖ | Бесплатный полнотекстовый | Стабилизация динамики транспортного средства с помощью цифрового управления шинами — алгоритм контроля возмущений шин для системы привода с электродвигателем
1.
 Введение
Введение Международное энергетическое агентство (МЭА) опубликовало отчет о тенденциях на мировом рынке электромобилей (EV) в Global Electric Vehicle Outlook 2018 [1]. В 2017 году было продано более 1 миллиона электромобилей, причем более половины мировых продаж приходится на Китай. Общее количество электромобилей на дорогах в 2017 году превысило 3 миллиона во всем мире, увеличившись более чем на 50% по сравнению с 2016 годом. С точки зрения доли, Норвегия остается самым передовым рынком продаж электромобилей в мире, на долю которого приходится более 39 автомобилей.% новых продаж в 2017 году. Далее следует Исландия с 11,7%, затем Швеция с 6,3%. МЭА также прогнозирует, что количество электромобилей на дорогах достигнет 125 миллионов к 2030 году в соответствии со сценарием новой политики МЭА. С другой стороны, ожидается, что прогресс в CASE (подключенные, автономные, общие, электрификация) приведет к прерывистым изменениям в цепочке создания стоимости и бизнес-модели автомобильной промышленности. Говорят, что это изменение создаст возможности и угрозы на автомобильном рынке. Если электрификация распространится среди компаний-поставщиков услуг, как это видно в текущем бизнесе смартфонов, считается, что это окажет большое влияние на автомобильную промышленность. Важной особенностью является то, что электромобили приводятся в движение электродвигателями с цифровым управлением. В настоящее время смартфон настраивается в соответствии с личными предпочтениями путем загрузки различных приложений. Для сравнения, можно ожидать, что электромобили будут настраивать такие характеристики, как безопасность, стоимость электроэнергии, стабильность рулевого управления и комфорт при езде. В будущем пользователи смогут загружать различные управляющие приложения, поставляемые из Интернета, и пользоваться функциями, соответствующими их личным предпочтениям, в виде программного обеспечения, просто приобретая транспортные средства, удовлетворяющие основным функциям транспортного средства.
Говорят, что это изменение создаст возможности и угрозы на автомобильном рынке. Если электрификация распространится среди компаний-поставщиков услуг, как это видно в текущем бизнесе смартфонов, считается, что это окажет большое влияние на автомобильную промышленность. Важной особенностью является то, что электромобили приводятся в движение электродвигателями с цифровым управлением. В настоящее время смартфон настраивается в соответствии с личными предпочтениями путем загрузки различных приложений. Для сравнения, можно ожидать, что электромобили будут настраивать такие характеристики, как безопасность, стоимость электроэнергии, стабильность рулевого управления и комфорт при езде. В будущем пользователи смогут загружать различные управляющие приложения, поставляемые из Интернета, и пользоваться функциями, соответствующими их личным предпочтениям, в виде программного обеспечения, просто приобретая транспортные средства, удовлетворяющие основным функциям транспортного средства.
Стабилизация динамики автомобиля к внезапным возмущениям является важной технической проблемой, особенно для будущей электрификации и автономного вождения [2].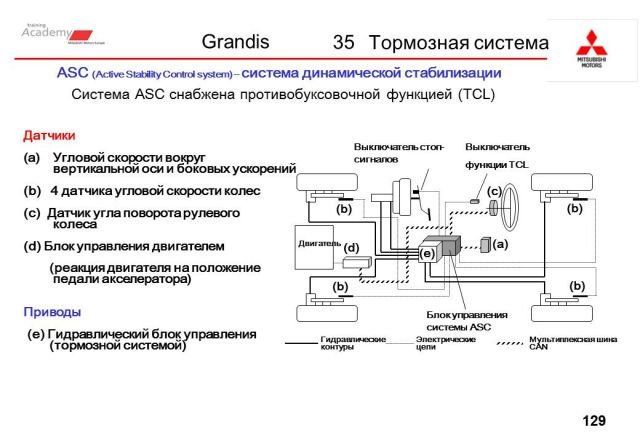 Однако с точки зрения безопасности и затрат на электроэнергию следует отметить, что такие средства контроля производительности с большим током были бы связаны с рисками, в том числе с перерасходом электроэнергии и непредсказуемым сбоем в работе системы. Следовательно, можно считать, что часть управления с такими большими токами следует оставить на усмотрение водителя или автономной системы безопасного вождения. В этой работе было обнаружено, что устойчивость рулевого управления электромобиля значительно улучшилась за счет наложения небольшого переменного тока на управляющий ток работы водителя для подавления помех от шин. В современной технике управления это можно разделить на интеллектуальное управление, представленное искусственным интеллектом (ИИ), и надежное управление, представленное управлением подавлением возмущений. В данной работе был выбран последний для достижения стабильного управления за счет многократной обработки сигнала с датчика с более высокой скоростью компьютерной обработки.
Однако с точки зрения безопасности и затрат на электроэнергию следует отметить, что такие средства контроля производительности с большим током были бы связаны с рисками, в том числе с перерасходом электроэнергии и непредсказуемым сбоем в работе системы. Следовательно, можно считать, что часть управления с такими большими токами следует оставить на усмотрение водителя или автономной системы безопасного вождения. В этой работе было обнаружено, что устойчивость рулевого управления электромобиля значительно улучшилась за счет наложения небольшого переменного тока на управляющий ток работы водителя для подавления помех от шин. В современной технике управления это можно разделить на интеллектуальное управление, представленное искусственным интеллектом (ИИ), и надежное управление, представленное управлением подавлением возмущений. В данной работе был выбран последний для достижения стабильного управления за счет многократной обработки сигнала с датчика с более высокой скоростью компьютерной обработки. В случае людей вместо использования мозговых функций, таких как ИИ, рефлекторные нервные функции отдают приоритет скорости реакции, чтобы избежать риска. Мы подумали, что эта идея может быть применена к контролю возмущения шин. В конце концов мы обнаружили, что это работает очень хорошо и позволяет подавить возмущение каждой шины независимо друг от друга с более высокой скоростью обработки и без какой-либо перекрестной обработки командных сигналов управления шинами. В будущем система двигателя с прямым приводом станет наиболее подходящей системой для алгоритма цифрового управления шинами [3,4,5,6]. Кроме того, необходимо будет уменьшить неподрессоренную массу мотор-колес с помощью дополнительной технологии [7].
В случае людей вместо использования мозговых функций, таких как ИИ, рефлекторные нервные функции отдают приоритет скорости реакции, чтобы избежать риска. Мы подумали, что эта идея может быть применена к контролю возмущения шин. В конце концов мы обнаружили, что это работает очень хорошо и позволяет подавить возмущение каждой шины независимо друг от друга с более высокой скоростью обработки и без какой-либо перекрестной обработки командных сигналов управления шинами. В будущем система двигателя с прямым приводом станет наиболее подходящей системой для алгоритма цифрового управления шинами [3,4,5,6]. Кроме того, необходимо будет уменьшить неподрессоренную массу мотор-колес с помощью дополнительной технологии [7].
Динамический отклик шины в 100 раз быстрее, чем у кузова автомобиля, поскольку вес шины намного меньше веса кузова автомобиля. Электродвигатель также имеет в 100 раз более высокую механическую реакцию, чем двигатель внутреннего сгорания [8]. Постоянная времени боковой силы шины, τ y , может быть представлена уравнением (1) [9]:
Постоянная времени боковой силы шины, τ y , может быть представлена уравнением (1) [9]:
где C p — мощность на поворотах, K — боковая жесткость шины, а V — скорость автомобиля. Кроме того, постоянная времени продольной силы τ x , может быть представлено уравнением (2) [9]:
где B представляет собой длину релаксации продольной силы шины (расстояние, необходимое для того, чтобы шина создавала устойчивую продольную силу), а u представляет скорость движения колеса.
Из уравнений (1) и (2) было рассчитано, что τ y = 0,001 с (C p = 1,4 кН/град, K = 10 5 Н/м) и τ x = 0,004 с (B = 0,05 м) при скорости автомобиля V = 50 км/ч. Эти значения близки к 0,0008 с, что является постоянной времени электродвигателя. Это говорит о том, что шина и электродвигатель могут быть хорошей комбинацией для достижения быстрого отклика для более быстрой системы управления. Следовательно, мы предложили новую концепцию цифрового управления шинами, которая может стабилизировать динамику транспортного средства путем подавления помех на шинах с помощью электродвигателя до того, как кузов транспортного средства станет неустойчивым. На рис. 1 показан тип объектов управления, соответствующий диапазону частот управления. Обычные объекты управления, такие как антиблокировочная тормозная система (ABS) и система динамического контроля устойчивости (DSC), нацелены на частотные диапазоны от 0,1 до 10 с. А вот у цифрового управления шинами они составляют от 1 до 100 мс, что может быть достигнуто только контроллером системы с электроприводом. Также важной особенностью является то, что электродвигатель может управлять как движущей, так и тормозной силой. Наше исследование показало, что контроль помех в шинах с помощью электродвигателей, соответствующих более высокому частотному диапазону, может быть более эффективным при критических характеристиках рулевого управления, например, при движении по мокрой поверхности.
Следовательно, мы предложили новую концепцию цифрового управления шинами, которая может стабилизировать динамику транспортного средства путем подавления помех на шинах с помощью электродвигателя до того, как кузов транспортного средства станет неустойчивым. На рис. 1 показан тип объектов управления, соответствующий диапазону частот управления. Обычные объекты управления, такие как антиблокировочная тормозная система (ABS) и система динамического контроля устойчивости (DSC), нацелены на частотные диапазоны от 0,1 до 10 с. А вот у цифрового управления шинами они составляют от 1 до 100 мс, что может быть достигнуто только контроллером системы с электроприводом. Также важной особенностью является то, что электродвигатель может управлять как движущей, так и тормозной силой. Наше исследование показало, что контроль помех в шинах с помощью электродвигателей, соответствующих более высокому частотному диапазону, может быть более эффективным при критических характеристиках рулевого управления, например, при движении по мокрой поверхности.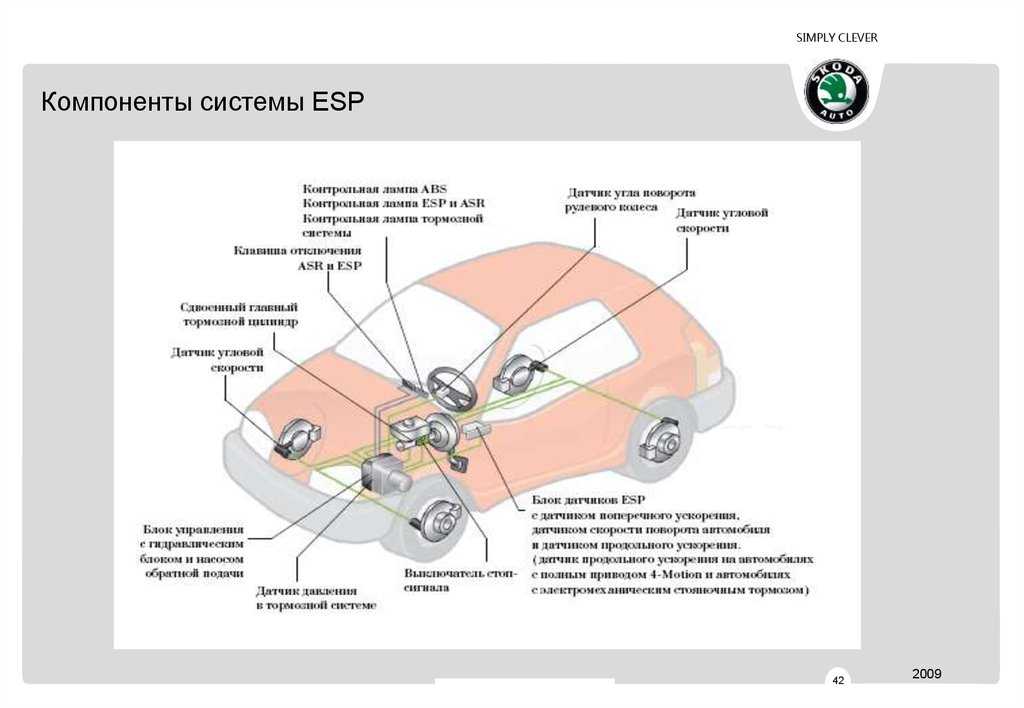
2. Алгоритм
2.1. Контроль возмущения шины
Как показано на рисунке 2, движущая сила шины F d включает возмущающий шум пятна контакта шины N1 и вибрацию неподрессоренной массы N2. Система контроля возмущений в шинах может нейтрализовать эти шумы с помощью электродвигателя [10]. Частота отсечки была определена таким образом, чтобы уменьшить величину передаточной функции коэффициента скольжения к движущей силе шины, F d /λ, в диапазоне от 10 Гц до 1 кГц, не влияя на частоту маневров человека менее 10 Гц.
2.2. Алгоритм управления возмущением шины
Алгоритм был переработан на основе модели, следующей за системой управления, предложенной Хори и Сакаи [11]. Была использована передаточная функция кузова транспортного средства, показанная в уравнении (3):
где M — масса автомобиля, μ — F d /F z , F d — движущая сила, F z — нагрузка, M w — значение пересчета массы на инерцию шины, V W – значение преобразования угловой скорости вращения шины, F м — значение преобразования силы двигателя в крутящий момент, λ — коэффициент проскальзывания шины, а s — оператор Лапласа. Постоянная времени кузова транспортного средства может быть определена уравнением (4):
Постоянная времени кузова транспортного средства может быть определена уравнением (4):
где постоянная времени увеличивается по мере увеличения величин M, M w и V. Кроме того, следует отметить, что по мере приближения dµ/dλ к нулю при максимальном значении µ постоянная времени быстро увеличивается, и кузову транспортного средства становится трудно реагировать на управление. Это говорит о том, что необходимо стабилизировать шину до того, как значение μ достигнет максимального значения. Как показано на рисунке 3, движущая сила двигателя F m , можно разделить на силу инерции колеса, F w , и движущую силу шины, F d , для движения вперед кузова транспортного средства. Выход F m может быть получен непосредственно от электродвигателя, а ввод F w может быть рассчитан из скорости вращения колеса, V w . Результат F d получается из уравнения F d = F м — F w как сила, создаваемая в пятне контакта шины. Из сравнения F d и сила, сопровождаемая номинальной моделью, резкое скольжение и микровибрация в более высоком диапазоне частот были извлечены фильтром нижних частот. Составляющая маневров человека компенсировалась фильтром высоких частот. Компонент отфильтрованного шума был вычтен из значения команды F m для применения к контроллеру двигателя. Для нахождения эффективного частотного прохода частота среза ФНЧ варьировалась от 0,01 до 10 кГц, а ФВЧ — от 0,01 до 10 Гц. Первый может отсекать высокочастотные помехи от электрических цепей, а вторые могут отключать низкочастотные помехи, не затрагивая маневры человека. Важно, чтобы все маневры человека, такие как дросселирование, торможение и управление, оставались неизменными за счет оптимизации частоты среза фильтра нижних частот.
Из сравнения F d и сила, сопровождаемая номинальной моделью, резкое скольжение и микровибрация в более высоком диапазоне частот были извлечены фильтром нижних частот. Составляющая маневров человека компенсировалась фильтром высоких частот. Компонент отфильтрованного шума был вычтен из значения команды F m для применения к контроллеру двигателя. Для нахождения эффективного частотного прохода частота среза ФНЧ варьировалась от 0,01 до 10 кГц, а ФВЧ — от 0,01 до 10 Гц. Первый может отсекать высокочастотные помехи от электрических цепей, а вторые могут отключать низкочастотные помехи, не затрагивая маневры человека. Важно, чтобы все маневры человека, такие как дросселирование, торможение и управление, оставались неизменными за счет оптимизации частоты среза фильтра нижних частот.
3. Результаты
3.1. Испытательный автомобиль
В качестве испытательного автомобиля был сконструирован электромобиль с двумя двигателями, в котором правое и левое задние колеса управлялись независимо двумя электродвигателями мощностью 35 кВт (рис. 4). Энкодер в каждом двигателе определял скорость вращения независимо. Крутящий момент двигателя также измерялся с помощью датчика крутящего момента, прикрепленного к оси вращения двигателя. Размер шин спереди был 185/55R15, а сзади 205/55R15. Для оценки нестабильности динамического поведения автомобиля автомобиль был оснащен датчиками GPS, угла поворота рулевого колеса и скорости рыскания.
4). Энкодер в каждом двигателе определял скорость вращения независимо. Крутящий момент двигателя также измерялся с помощью датчика крутящего момента, прикрепленного к оси вращения двигателя. Размер шин спереди был 185/55R15, а сзади 205/55R15. Для оценки нестабильности динамического поведения автомобиля автомобиль был оснащен датчиками GPS, угла поворота рулевого колеса и скорости рыскания.
3.2. Метод испытаний
Оценка реализации системы управления была проведена на мокрой скользящей площадке, на которой было выполнено испытание на устойчивое вращение на поверхности с низким коэффициентом трения (рис. 5). Радиус установившегося поворота был сохранен равным 30 м, чтобы найти его критическую скорость поворота путем увеличения скорости поворота. Скорость, при которой величина руления превышала пороговое значение, принималась за критическую скорость. Пороговое значение зависело от предела круга трения. Водитель-испытатель оценивал эффективность рулевого управления по 5-балльной системе [12].
4. Результаты и обсуждение
4.1. Влияние применяемой управляющей частоты
Ощущение рулевого управления на критической скорости оценивалось на мокрой площадке скольжения, как показано на рис. 5. Во-первых, отношение между F m и F d в установившемся режиме испытания на ускоренное поворотное движение. был исследован и показан на рисунке 6. Согласно уравнению (3), когда шина сохраняет сцепление с дорожным покрытием в адгезивном состоянии, F d пропорционально F м , как показано прямой линией в уравнении (5). В этом состоянии большая часть крутящего момента двигателя может быть передана движущей силе шины:
На рисунке 6 фактическая сила, создаваемая на задней правой шине (положение RR), как функция силы, создаваемой двигателем, была наложена на тот же график. Можно видеть, что фактическое измеренное значение F d соответствует прямой линии. Это показывает, что шина может сохранять стабильное сцепление с дорожным покрытием под контролем водителя.
Это показывает, что шина может сохранять стабильное сцепление с дорожным покрытием под контролем водителя.
На рис. 7 показано соотношение между F d и F m в состоянии непосредственно перед разветвлением. Результаты показали, что F d не подчиняется уравнению (5) и колеблется в значительной степени независимо от F m . Это указывало на то, что шина уже демонстрировала признаки проскальзывания непосредственно перед пробуксовкой транспортного средства, и свидетельствовало о том, что можно расширить запас устойчивости, подавляя это колебание с помощью управления двигателем.
Диапазоны частот цифрового управления шинами определялись сочетаниями частот среза ФВЧ и ФНЧ: I: 10–1000 Гц, II: 1–100 Гц, III: 0,1–10 Гц, IV : 0,01–1 Гц и V: 0,01–1000 Гц. Величина эффекта показана на рисунке 8 вместе с соответствующей оценкой чувства руля. Рейтинг оценивался высшим баллом 7 и низшим баллом 5 по 5-балльной системе. Оценка проводилась относительным методом оценки с эталоном или без контроля [12]. Было подтверждено, что оценка чувства руля увеличивалась с увеличением частоты управления. Наилучший частотный диапазон оказался от 10 до 1000 Гц, что соответствовало масштабу длины за цикл управления от 1 м до 1 см по окружности шины при скорости 40 км/ч. Шкала длины 1 м и 1 см соответствовала половине длины окружности шины и части блочного рисунка на резине протектора шины соответственно. Наиболее частая контрольная длина в этом диапазоне может соответствовать длине пятна контакта шины около 10 см. Установлено, что наиболее эффективный диапазон управляющих частот при критической езде по мокрой площадке скольжения соответствует близкой к длине шкалы шины. Таким образом, было доказано, что цифровое управление шинами может быть выполнено в пределах длины шкалы шин.
Было подтверждено, что оценка чувства руля увеличивалась с увеличением частоты управления. Наилучший частотный диапазон оказался от 10 до 1000 Гц, что соответствовало масштабу длины за цикл управления от 1 м до 1 см по окружности шины при скорости 40 км/ч. Шкала длины 1 м и 1 см соответствовала половине длины окружности шины и части блочного рисунка на резине протектора шины соответственно. Наиболее частая контрольная длина в этом диапазоне может соответствовать длине пятна контакта шины около 10 см. Установлено, что наиболее эффективный диапазон управляющих частот при критической езде по мокрой площадке скольжения соответствует близкой к длине шкалы шины. Таким образом, было доказано, что цифровое управление шинами может быть выполнено в пределах длины шкалы шин.
4.2. Стабилизация рулевого управления на мокрой скользящей площадке
Влияние цифрового управления шинами на стабилизацию динамики автомобиля было количественно исследовано бортовыми датчиками, измеряющими угол поворота рулевого колеса (градусы) и скорость рыскания (градусы/с). Его сравнивали с осмотренными без цифрового контроля шин. Частота среза 10–1000 Гц была выбрана как наиболее эффективная полоса частот. Радиус поворота на мокрой площадке сохраняли на уровне 30 м, увеличивая скорость автомобиля до критической. Графики характеристик рулевого управления, представленные графиком зависимости скорости рыскания (град/с) от угла поворота рулевого колеса (градусы) при критической скорости, показаны на рисунке 9.. Критическая скорость с цифровым управлением шинами составила 45 км/ч, без управления – 44 км/ч.
Его сравнивали с осмотренными без цифрового контроля шин. Частота среза 10–1000 Гц была выбрана как наиболее эффективная полоса частот. Радиус поворота на мокрой площадке сохраняли на уровне 30 м, увеличивая скорость автомобиля до критической. Графики характеристик рулевого управления, представленные графиком зависимости скорости рыскания (град/с) от угла поворота рулевого колеса (градусы) при критической скорости, показаны на рисунке 9.. Критическая скорость с цифровым управлением шинами составила 45 км/ч, без управления – 44 км/ч.
Характеристики рулевого управления определялись по отклонению от центральной линии при нулевом угле поворота на графике. Стабильность автомобиля оценивалась по размеру и положению петли гистерезиса на этой диаграмме. По мере того, как скорость автомобиля приближалась к критической, вертикальные нагрузки на внешнюю сторону шин в среднем становились выше, а нагрузки на внутреннюю сторону шин в среднем уменьшались. Оба сцепления стали неустойчивыми на критической скорости и вызвали скачкообразное колебание. В этой ситуации мешающий шум шины может вызвать резкое проскальзывание пятна контакта шины, что увеличивает риск потери маневренности и проскальзывания. Когда характеристика рулевого управления внезапно переходит в неустойчивое состояние, цифровой контроллер шины может подавить резкое проскальзывание и микровибрацию, возникающую между шиной и поверхностью дороги. Это привело к независимой оптимизации распределения движущих сил правой и левой задних шин, чтобы изменить характеристики рулевого управления на недостаточную поворачиваемость (U / S), тем самым поддерживая более высокую скорость поворота и снижая риск проскальзывания. Как показано на правом рисунке на рисунке 9петля гистерезиса при цифровом управлении шинами появилась почти в области левого угла поворота, что соответствует характеристике избыточной поворачиваемости (O/S). Это говорит о том, что цифровое управление шинами может стабилизировать динамику автомобиля, даже если она имеет характеристику избыточной поворачиваемости (O/S).
В этой ситуации мешающий шум шины может вызвать резкое проскальзывание пятна контакта шины, что увеличивает риск потери маневренности и проскальзывания. Когда характеристика рулевого управления внезапно переходит в неустойчивое состояние, цифровой контроллер шины может подавить резкое проскальзывание и микровибрацию, возникающую между шиной и поверхностью дороги. Это привело к независимой оптимизации распределения движущих сил правой и левой задних шин, чтобы изменить характеристики рулевого управления на недостаточную поворачиваемость (U / S), тем самым поддерживая более высокую скорость поворота и снижая риск проскальзывания. Как показано на правом рисунке на рисунке 9петля гистерезиса при цифровом управлении шинами появилась почти в области левого угла поворота, что соответствует характеристике избыточной поворачиваемости (O/S). Это говорит о том, что цифровое управление шинами может стабилизировать динамику автомобиля, даже если она имеет характеристику избыточной поворачиваемости (O/S). Также видно, что размер петли с контролем был меньше, чем без контроля. Это показывает тот факт, что водителю не нужно было совершать лишние маневры рулем, чтобы избежать раскручивания. Следует отметить, что цифровое управление шинами с помощью электродвигателя могло обнаруживать и устранять резкое проскальзывание и вибрации, возникающие в пятне контакта, независимо для каждой шины. Таким образом, был сделан вывод, что цифровое управление шинами хорошо работает независимо для каждой шины, поскольку оно может подавлять колебания каждой шины до того, как кузов транспортного средства начнет скользить. Это означает, что ему не нужна никакая информация от датчиков на кузове автомобиля и совместное управление между шинами.
Также видно, что размер петли с контролем был меньше, чем без контроля. Это показывает тот факт, что водителю не нужно было совершать лишние маневры рулем, чтобы избежать раскручивания. Следует отметить, что цифровое управление шинами с помощью электродвигателя могло обнаруживать и устранять резкое проскальзывание и вибрации, возникающие в пятне контакта, независимо для каждой шины. Таким образом, был сделан вывод, что цифровое управление шинами хорошо работает независимо для каждой шины, поскольку оно может подавлять колебания каждой шины до того, как кузов транспортного средства начнет скользить. Это означает, что ему не нужна никакая информация от датчиков на кузове автомобиля и совместное управление между шинами.
5. Выводы
Шины являются единственной частью, которая контактирует и взаимодействует с дорожным покрытием. Поэтому мы предложили концепцию цифрового управления шинами с электродвигателями, которые могут обнаруживать и устранять мешающие шумы, такие как резкие пробуксовки и вибрации, в пятне контакта шин до того, как кузов автомобиля станет неустойчивым.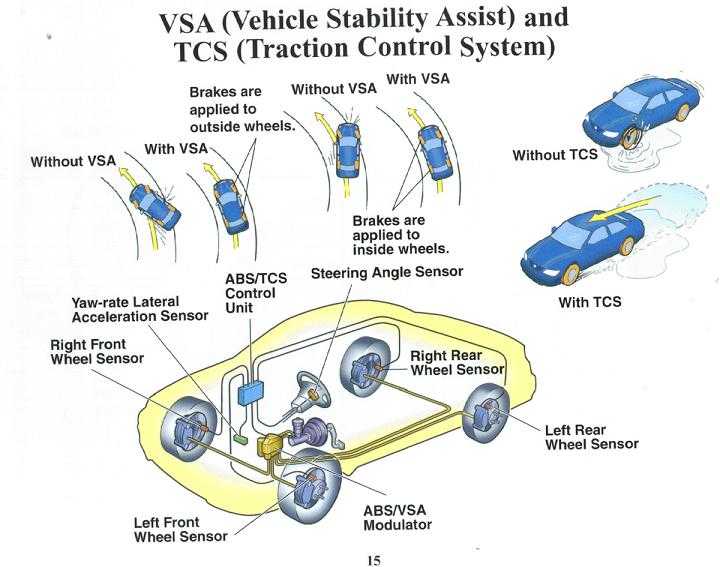 Это также дает нам то преимущество, что при этом потребляется меньше энергии, чем при управлении кузовом автомобиля, который в 100 раз тяжелее. Алгоритм контроля возмущения шин был реализован на электромобиле с двухдвигательной системой и оказался эффективным, особенно на критической скорости на дорожном покрытии с низким коэффициентом трения. Величина эффекта оценивалась как по ощущениям от руля, так и по бортовым приборам. Алгоритм возмущения шины может сделать шину более чувствительной к резким изменениям и вибрациям. Установлено, что наиболее эффективным частотным диапазоном является диапазон от 10 до 1000 Гц, что соответствует полудлине окружности шины и длине блока на рисунке протектора соответственно. Наиболее частая контрольная длина может соответствовать длине пятна контакта шины около 10 см. Соответственно, характеристики сцепления с дорогой каждой шины были улучшены, и устойчивость рулевого управления автомобиля может быть улучшена. Каждая шина, оснащенная электродвигателем, может обнаруживать и устранять нарушения в пятне контакта шин самостоятельно, подобно искусственному интеллекту, и стабилизировать динамику автомобиля, особенно на критической скорости на поверхности с низким коэффициентом трения.
Это также дает нам то преимущество, что при этом потребляется меньше энергии, чем при управлении кузовом автомобиля, который в 100 раз тяжелее. Алгоритм контроля возмущения шин был реализован на электромобиле с двухдвигательной системой и оказался эффективным, особенно на критической скорости на дорожном покрытии с низким коэффициентом трения. Величина эффекта оценивалась как по ощущениям от руля, так и по бортовым приборам. Алгоритм возмущения шины может сделать шину более чувствительной к резким изменениям и вибрациям. Установлено, что наиболее эффективным частотным диапазоном является диапазон от 10 до 1000 Гц, что соответствует полудлине окружности шины и длине блока на рисунке протектора соответственно. Наиболее частая контрольная длина может соответствовать длине пятна контакта шины около 10 см. Соответственно, характеристики сцепления с дорогой каждой шины были улучшены, и устойчивость рулевого управления автомобиля может быть улучшена. Каждая шина, оснащенная электродвигателем, может обнаруживать и устранять нарушения в пятне контакта шин самостоятельно, подобно искусственному интеллекту, и стабилизировать динамику автомобиля, особенно на критической скорости на поверхности с низким коэффициентом трения.
Дополнительные материалы
Следующие материалы доступны в Интернете по адресу https://www.mdpi.com/2032-6653/10/2/25/s1. Видео S1: без управления и Видео S2: с контролем.
Вклад авторов
Исследование, К.А. и Ю.В.
Финансирование
Это исследование не получило внешнего финансирования.
Благодарности
Авторы благодарят корпорацию Bridgestone за разрешение на публикацию этой статьи. Выражаем благодарность Y. Hori из Токийского университета за полезные обсуждения и советы, чтобы начать думать об алгоритме контроля возмущения шин в этом проекте.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Ссылки
- Global Electric Vehicle (EV) Outlook 2018. Доступно в Интернете: https://www.iea.org/gevo2018/ (по состоянию на 15 апреля 2019 г.).
- Андерсон З.М.; Гованарди, М .; Такер, К.; Экехян, Дж.А. Система активной безопасности подвески.
 US2017/0137023, 18 мая 2017 г. [Google Scholar]
US2017/0137023, 18 мая 2017 г. [Google Scholar] - Wang, Y.; Фудзимото, Х .; Хара, С. Распределение и управление движущей силой электромобиля с четырьмя двигателями в колесах: пример ускорения на поверхностях с раздельным трением. IEEE транс. Инд. Электрон. 2016 , 64, 3380–3388. [Google Scholar] [CrossRef]
- Нам, К.; О, С.; Фудзимото, Х .; Хори, Ю. Оценка бокового скольжения и углов крена электромобилей с использованием датчиков поперечной силы в шинах с помощью подходов RLS и фильтра Калмана. IEEE транс. Инд. Электрон. 2012 , 60, 988–1000. [Google Scholar] [CrossRef]
- Hu, J.; Ван, Ю.; Фудзимото, Х .; Хори, Ю. Надежный контроль устойчивости по рысканью для электромобилей с электродвигателем. IEEE/ASME Trans. Мехатрон. 2017 , 22, 1360–1370. [Академия Google] [CrossRef]
- Сато, М.; Ямамото, Г.; Гундзи, Д .; Имура, Т .; Фудзимото, Х. Разработка беспроводного внутриколесного двигателя с использованием магнитно-резонансной муфты.
 IEEE транс. Силовой электрон. 2016 , 31, 5270–5278. [Google Scholar] [CrossRef]
IEEE транс. Силовой электрон. 2016 , 31, 5270–5278. [Google Scholar] [CrossRef] - Нагая, Г.; Вакао, Ю.; Абэ, А. Разработка полноприводного автомобиля с усовершенствованным механизмом динамического демпфирования. JSAE Rev. 2003 , 24, 477–481. [Google Scholar] [CrossRef]
- Хори, Ю.; Тойода, Ю.; Цуруока Ю. Управление тягой электромобиля: основные экспериментальные результаты с использованием тестового EV UOT Electric March. IEEE транс. инд. заявл. 1998 , 34, 1131–1138. [Google Scholar] [CrossRef]
- Кларк, С.К. Механика пневматических шин; Глава 9, Анализ свойств шин; Национальное управление безопасности дорожного движения: Вашингтон, округ Колумбия, США, 1981 г.; стр. 721–757.
- Вакао, Ю.; Акутагава, К. Способ и устройство для управления транспортным средством. EP1502805A1, 2 февраля 2005 г. [Google Scholar]
- Hori, Y.; Сакаи, С.
 ; Садо, Х .; Учида, Т. Управление движением электромобиля с использованием быстрой реакции электродвигателя на крутящий момент. Протокол МФБ. Том. 1999 , 32, 8166–8171. [Google Scholar] [CrossRef]
; Садо, Х .; Учида, Т. Управление движением электромобиля с использованием быстрой реакции электродвигателя на крутящий момент. Протокол МФБ. Том. 1999 , 32, 8166–8171. [Google Scholar] [CrossRef] - Насукава, К.; Мияшита, Ю.; Сиокава, М. Дзидоуса Но Соукосейно То Сикэнхо. В тестах эффективности для бега, 3-е изд.; Санкайдо: Токио, Япония, 1993 г.; п. 217. [Google Scholar]
Рис. 1. Система управления, соответствующая диапазону частот управления.
Рисунок 1. Система управления, соответствующая диапазону частот управления.
Рисунок 2. Разработка контроллера возмущений в шинах для механического подавления шума в шинах.
Рисунок 2. Разработка контроллера возмущений в шинах для механического подавления шума в шинах.
Рисунок 3. Разработка контроллера помех для механического подавления шума в шинах (LPF: фильтр нижних частот, HPF: фильтр верхних частот).
Рисунок 3.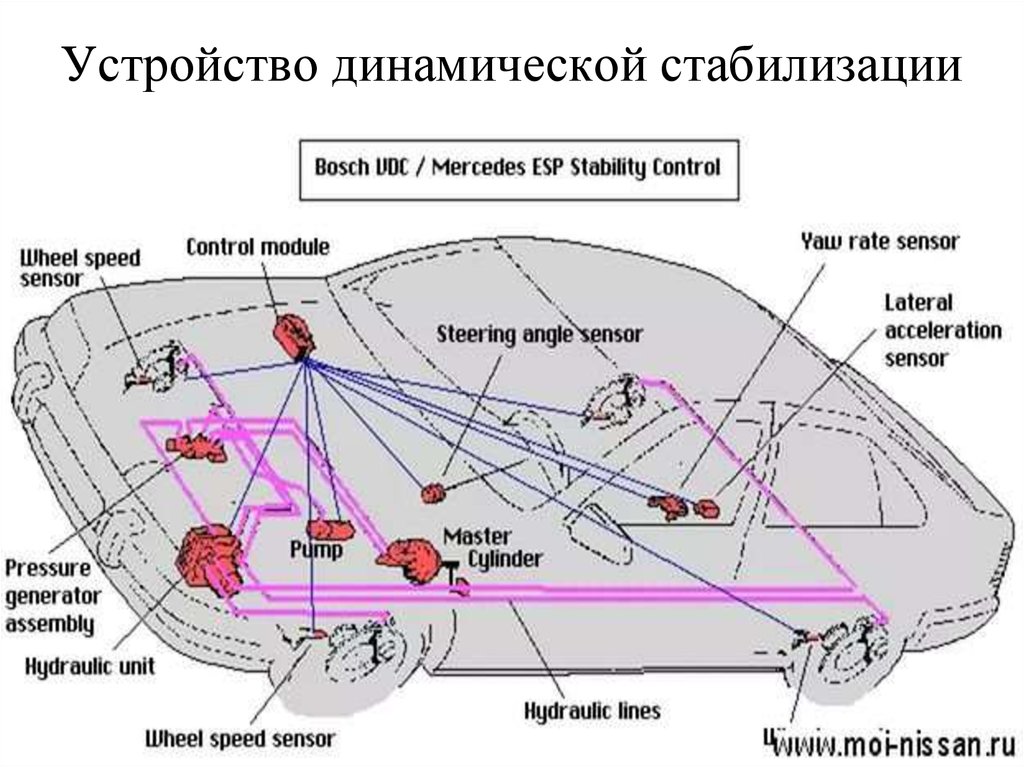 Разработка контроллера помех для механического подавления шума в шинах (LPF: фильтр нижних частот, HPF: фильтр верхних частот).
Разработка контроллера помех для механического подавления шума в шинах (LPF: фильтр нижних частот, HPF: фильтр верхних частот).
Рисунок 4. Испытательный электромобиль, оснащенный системой с двумя двигателями.
Рисунок 4. Испытательный электромобиль, оснащенный системой с двумя двигателями.
Рисунок 5. Аэрофотоснимок противоскользящей площадки, наложенный на GPS-траекторию центра тяжести транспортного средства.
Рисунок 5. Аэрофотоснимок противоскользящей площадки, наложенный на GPS-траекторию центра тяжести транспортного средства.
Рисунок 6. Соотношение между силой трения F d_RR и крутящим моментом двигателя F m_RR , в устойчивом состоянии в тесте ускоренного поворота.
Рисунок 6. Соотношение между силой трения, F d_RR , и крутящим моментом двигателя, F m_RR , в устойчивом состоянии в испытании на ускоренное вращение.
Рисунок 7. Соотношение между силой трения F d_RR и крутящим моментом двигателя F m_RR непосредственно перед раскручиванием в испытании на ускоренное вращение.
Соотношение между силой трения F d_RR и крутящим моментом двигателя F m_RR непосредственно перед раскручиванием в испытании на ускоренное вращение.
Рисунок 7. Связь между силой трения, F d_RR и крутящий момент двигателя F m_RR непосредственно перед раскручиванием в тесте ускоренного поворота.
Рисунок 8. Величина воздействия на каждый диапазон управляющих частот и соответствующая оценка ощущения рулевого управления.
Рис. 8. Величина воздействия на каждый диапазон управляющих частот и соответствующая оценка ощущения рулевого управления.
Рисунок 9. Маневрирование рулевым управлением на мокрой площадке скольжения по сравнению с автомобилями с цифровым управлением шин и без него. Более подробную информацию можно найти в дополнительных материалах (Видео S1: без контроля и Видео S2: с контролем).
Рис. 9. Маневрирование рулевым управлением на мокрой площадке скольжения по сравнению с автомобилями с цифровым управлением шин и без него. Более подробную информацию можно найти в дополнительных материалах (Видео S1: без контроля и Видео S2: с контролем).
Более подробную информацию можно найти в дополнительных материалах (Видео S1: без контроля и Видео S2: с контролем).
© 2019 авторами. Лицензиат MDPI, Базель, Швейцария. Эта статья находится в открытом доступе и распространяется на условиях лицензии Creative Commons Attribution (CC BY) (http://creativecommons.org/licenses/by/4.0/).
[PDF] Гибридное управление боковой стабилизацией электромобиля
- title={Гибридное управление поперечной стабилизацией электромобиля},
автор = {Хатир Табти, М. Бурахла и Лотфи Мостефаи},
год = {2013}
}
- Хатир Табти, М. Бурахла, Л. Мостефаи
- Опубликовано в 2013 г.
- Инженерия, математика
В статье представлен новый метод управления движением, применяемый в системе стабилизации водителя электромобиля с независимым приводом колес. Сформулировав динамику транспортного средства с помощью аппроксимации силовых характеристик шины кусочно-аффинными функциями, динамику транспортного средства можно описать как линейную гибридную динамическую систему для разработки контроллера с предсказанием гибридной модели.
 Ожидается, что этот контроллер заставит скорость рыскания соответствовать эталону, обеспечивающему безопасность автомобиля…
Ожидается, что этот контроллер заставит скорость рыскания соответствовать эталону, обеспечивающему безопасность автомобиля…Просмотр через Publisher
content.sciendo.comИнтегрированная система динамики транспортного средства посредством координированного управления активной аэродинамикой, активного заднего рулевого управления, векторизации крутящего момента и гидравлически связанной подвески
Результаты показывают, что предложенная схема управления способна улучшить несколько показателей производительности транспортного средства, включая комфорт при езде и поперечную устойчивость по сравнению с неинтегрированной системой управления.
Управление энергопотреблением гибридного электромобиля с использованием боковой динамики транспортного средства в прогнозировании скорости
Оптимальный метод управления с новым адаптивным алгоритмом эквивалентного коэффициента (EF) предназначен для распределения крутящего момента двигателя и мотора, а также графика переключения коробки передач и поддерживает SoC аккумуляторной батареи на разумном интервале.

Режимы работы электромобиля с поддержкой реактивной мощностью с использованием SMC в распределительной генерации Бортовое зарядное устройство для аккумуляторов электромобилей (EV) емкостью 100 Ач для работы в сетях «сеть-автомобиль» (G2V) и «автомобиль-сеть» (V2G) с реактивной мощностью…
ПОКАЗЫВАЕТ 1-8 ИЗ 8 ССЫЛОК
Электронная стабилизация транспортного средства и регулировка рыскания: конструкция гибридного прогнозирующего управления моделями
- Daniele Bernardini, S. D. Cairano, A. Bemporad, H. E. Tseng
- Proceings 48-часовой конференции IEEE по принятию решений и управлению (CDC), проведенной совместно с 28-й Китайской конференцией по управлению в 2009 г. в замкнутом контуре с точной нелинейной моделью.
Система повышения устойчивости на основе нечетких вычислений для четырехколесного электромобиля
- Ф.
 Тахами, Р. Каземи, Шахрох Фарханги, Бехзад Самади
Тахами, Р. Каземи, Шахрох Фарханги, Бехзад Самади Инженерия, информатика
- 2002
Direction Fuzzy Метод контроля рыскания вместе с новым контроллером проскальзывания колес используется для повышения устойчивости и безопасности транспортного средства, и в этой статье представлен новый оценщик скорости, который используется для оценки проскальзывания.
Будущее транспортное средство, приводимое в движение электричеством и исследованием управления четырехколесным двигателем «UOT Electric March II». электромобиль.
Применение прогнозирующего управления гибридной моделью для оптимальной полуактивной подвески МСИЭ 2005.
- 2005
В прошлом исследовалась задача оптимального управления полуактивной подвеской четвертьвагона. Учитывая, что полуактивная подвеска полувагона может быть смоделирована как линейная система с…
Нелинейное регулирование: кусочно-линейный подход
- Эдуардо Зонтаг
Математика
- 1981 6 90 задачи за счет использования (дискретных по времени) кусочно-линейных систем.

- Ф.