Смирнов Г.А. Теория движения колесных машин
- формат doc, pdf
- размер 13.28 МБ
- добавлен 07 июня 2009 г.
Рассмотрены законы движения колесной машины как механической
системы, исследованы характеризующие эти законы зависимости,
эксплуатационные свойства колесных машин. Наибольшее внимание
уделено многоосным и многоприводным машинам. Второе издание (1-е
изд. 1981 г. ) дополнено материалами по топливной экономичности,
новым методам экспериментального определения основных коэффициентов
и других характеристик взаимодействия колесных машин с дорогой и
воздухом. Изменено методически построение учебника. Рассмотрены
законы движения колесной машины как механической системы,
исследованы характеризующие эти законы зависимости,
эксплуатационные свойства колесных машин. Наибольшее внимание
уделено многоосным и многоприводным машинам.
1990. Страниц:
352. Формат: PDF.
Похожие разделы
- Академическая и специальная литература
- Геологические науки и горное дело
- Горное дело
- Открытые горные работы
- Академическая и специальная литература
- Сельское хозяйство
- Сельскохозяйственный сервис, машины и оборудование
- Тракторы и самоходные шасси
- Прикладная литература
- Досуг
- Домашнему мастеру
- Самодельные транспортные средства и механизмы
Смотрите также
Карта
- формат pdf
- размер 27.
 22 МБ
22 МБ - добавлен 13 октября 2011 г.
Под ред. М. П. Александрова и Д. Н. Решетова. — 2-е изд., перераб. и доп. — М.: Машиностроение, 1987. — 122 с.: ил. Атлас содержит справочные данные и типовые конструкции деталей, узлов и механизмов различных грузоподъемных машин и машин непрерывного транспорта. Предназначен для студентов ВТУЗов в качестве справочного учебного пособия по курсовому проектированию ПТМ. Может быть использован при выполнении проектов по курсу «Детали машин» и дипломн…
- формат djvu
- размер 14.49 МБ
- добавлен 19 ноября 2010 г.
М.: Высш. школа, 1976. — Аннотация: В атласе представлены чертежи основных типов подъемно-транспортных машин, применяемых в строительной промышленности: тягальных и монтажных лебедок, строительных кранов (башенных, гусеничных, колесных, автомобильных, тракторных), конвейерного, погрузочного и другого оборудования. Приведены основные технические характеристики машин, их кинематические и гидравлические схемы, чертежи основных узлов и деталей. Особо…
Приведены основные технические характеристики машин, их кинематические и гидравлические схемы, чертежи основных узлов и деталей. Особо…
- формат pdf
- размер 7.51 МБ
- добавлен 09 сентября 2011 г.
Харків: НТУ «ХПІ», 2003. — 264с. У навчальному посібнику викладено особливості розрахунку, конструювання і дослідження об’ємного гідроприводу підйомно-транспортних, будівельних та дорожніх машин. Розглядаються різні режими і процеси, що характерні для гідроприводу кранів, конвеєрів, будівельних та дорожніх машин. Подані приклади розрахунку окремих типів гідроприводів. Особлива увага приділена роботі в генераторному режимі. Наведені новітні дані…
- формат pdf
- размер 7.17 МБ
- добавлен 08 сентября 2011 г.
Навчальний посібник. — Харків: НТУ «ХПІ», 2005. — 304 с. Наведено параметри вантажопідіймальних машин, їх гнучких елементів, деталей для навивки та звивання гнучких елементів, блоків та інших елементів вантажопідіймальних машин. Розглянуті різноманітні приводи та механізми ВПМ, конструкції мостових, козлових кранів. Докладно відображені питання динамічного навантаження ВПМ та запобіжні засоби ВПМ. Рекомендовано для студентів вищих навчальних зак…
— Харків: НТУ «ХПІ», 2005. — 304 с. Наведено параметри вантажопідіймальних машин, їх гнучких елементів, деталей для навивки та звивання гнучких елементів, блоків та інших елементів вантажопідіймальних машин. Розглянуті різноманітні приводи та механізми ВПМ, конструкції мостових, козлових кранів. Докладно відображені питання динамічного навантаження ВПМ та запобіжні засоби ВПМ. Рекомендовано для студентів вищих навчальних зак…
- формат pdf
- размер 19.12 МБ
- добавлен 23 марта 2010 г.
Вища школа. — Киев 1978. — 576 с. В книге освещены вопросы расчета и проектирования грузоподъемных и транспортирующих машин, изучаемых в курсе «Подъемно-транспортные машины». Приведены расчеты грузоподъемных машин (мостового, поворотных, передвижных кранов, крановых механизмов с гидравлическим приводом) и транспортирующих машин (ленточных, пластинчатого, скребкового, винтового, вибрационного и других конвейеров, ковшовых элеваторов, пневматичес.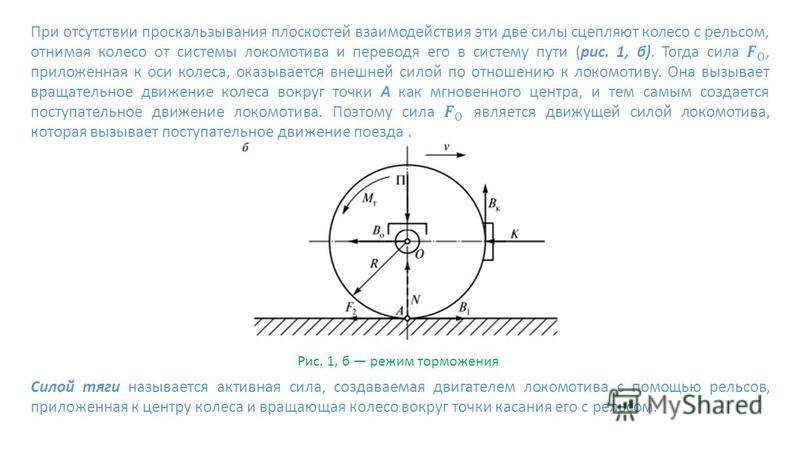
- формат djvu
- размер 24.4 МБ
- добавлен 08 сентября 2011 г.
Свердловск: изд-во УПИ им. С.М. Кирова, 1987. — 86 с. Показана возможность использования простых расчетных схем для динамического анализа. При расчете вероятности безотказной работы использована теория случайных величин, случайных функций и ее новейший раздел — теория стационарных выбросов. Материал пособия позволяет выполнять расчеты надежности первого приближения на стадии проектирования и проводить сопоставительный анализ вновь проектируемой…
- формат docx
- размер 1.68 МБ
- добавлен 04 июля 2011 г.
Тюмень 2011, ТюмГНГУ, кафедра ТТС, группа СФО, 27 страниц КДМ для поливомоечных работ дисциплина: Конструкции и проектирование транспортно-технологических машин Введение Общие сведения о поливомоечных машинах Классификация поливомоечных машин Водяная система поливомоечной машины Насадки Характеристики отечественных поливомоечных машин.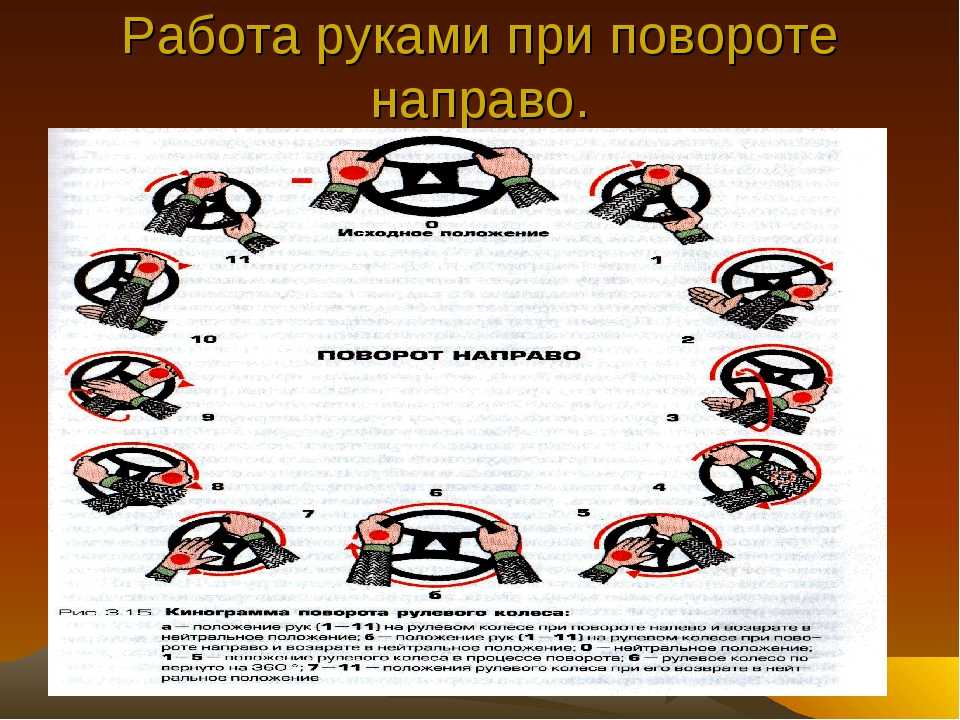
- формат djvu
- размер 49.82 МБ
- добавлен 08 декабря 2010 г.
М.: Машиностроение, 1987. -160 с. Рассмотрены динамические нагрузки и параметры при подъеме груза и передвижении крана, характерные режимы нагружения, вопросы устойчивости и системы стабилизации прямолинейного движения крана, ограничители перекоса. Приведены расчетные и конструктивные схемы механизмов подъема и передвижения; изложены методы определения и снижения нагрузок. Книга предназначена для инженерно-технических работников, занимающихся рас…
- формат pdf
- размер 18.83 МБ
- добавлен 18 октября 2011 г.
Изд. 3-е, переработанное и дополненное. М., «Машиностроение», 1971, 464 стр. В книге изложены основы проектирования грузоподъемных машин и приведены примеры расчета. Даны методические указания по выполнению проекта, основы расчета и конструирования грузоподъемных машин, описание практических приемов расчета всех основных узлов машины с использованием действующих стандартов , унифицированных и нормализованных узлов и деталей.
3-е, переработанное и дополненное. М., «Машиностроение», 1971, 464 стр. В книге изложены основы проектирования грузоподъемных машин и приведены примеры расчета. Даны методические указания по выполнению проекта, основы расчета и конструирования грузоподъемных машин, описание практических приемов расчета всех основных узлов машины с использованием действующих стандартов , унифицированных и нормализованных узлов и деталей.
- формат djvu, doc
- размер 7.21 МБ
- добавлен 08 июня 2009 г.
В книге изложены основы проектирования грузоподъемных машин и даны примеры расчета мостового электрического крана, стационарного поворотного крана и электрической тали (тельфера). Книга содержит методические указания по выполнению проекта, даст теоретические основы расчета и конструирования грузоподъемных машин, описание практических приемов расчета всех основных узлов машины с использованием действующих стандартов, унифицированных и нормализован. ..
..
1
Первый слайд презентации
ТЕОРИЯ ДВИЖЕНИЯ ВОЕННЫХ КОЛЕСНЫХ МАШИН Слайды к лекциям по курсу Лекция 9
Изображение слайда
2
Слайд 2
Распределение крутящих моментов и
окружных сил по колесам
В сложной динамической системе колесной машины крутящие моменты на всех валах и колесах беспрерывно изменяются. Это объясняется не только многообразием процессов и связей, имеющихся в самой КМ, но и влиянием переменных внешних условий, на которые автоматически или по воле водителя она реагирует.
Однако при относительно постоянных условиях, например при движении КМ с постоянной скоростью по ровной ОП, изменение крутящих моментов невелико (средние квадратичные отклонения моментов M к на колесах не превышает 15…20 % от их средней величины).
Изображение слайда
3
Слайд 3
В КМ наибольшее распространение получили узлы, обеспечивающие следующие виды связей: блокированная связь; дифференциальная связь; связь через муфты свободного хода. Узлы разветвления трансмиссии Блокированная связь Дифференциальная связь Связь через муфты свободного хода Распределение крутящих моментов и окружных сил по колесам
Изображение слайда
4
Слайд 4
Обозначим параметры входного вала в узле разветвления М вх и ω вх, а двух выходных валов – М i и ω i. Общие уравнения для узла имеют вид:
где u уз – передаточном числе узла;
η уз – КПД узла.
u уз
η уз
М вх, ω вх
М 1, ω 1
М 2, ω 2
Распределение крутящих моментов и
окружных сил по колесам
Общие уравнения для узла имеют вид:
где u уз – передаточном числе узла;
η уз – КПД узла.
u уз
η уз
М вх, ω вх
М 1, ω 1
М 2, ω 2
Распределение крутящих моментов и
окружных сил по колесам
Изображение слайда
5
Слайд 5
При u уз = 1 и u 12 = 1 все угловые скорости равны: ω вх = ω 1 = ω 2 Блокированная связь В случае блокированной связи при отсутствии механизма, изменяющего отношение угловых скоростей выходных валов ( u 12 = 1 ), должно выполняться условие ω 1 = ω 2. Распределение крутящих моментов и окружных сил по колесам
Изображение слайда
6
Слайд 6
Распределение крутящих моментов и
окружных сил по колесам
Дифференциальная связь с коэффициентом блокировки k бл
После достижения отношения моментов на выходных валах, равного коэффициенту блокировки дифференциала:
должны выполняться условия
Если M 2 / M 1 < k бл, то узел ведет себя как блокированная связь, дифференциальные свойства проявляются только при M 2 / M 1 > k бл.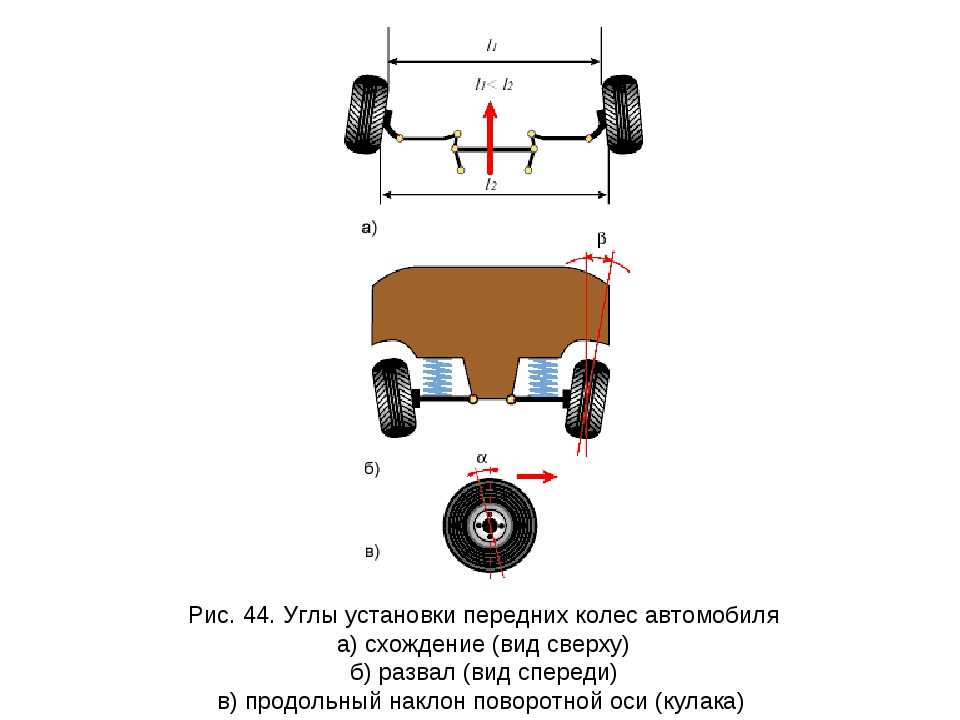
Изображение слайда
7
Слайд 7
Распределение крутящих моментов и окружных сил по колесам При одинаковых знаках выходных моментов ( M 2 / M 1 > 0 ) узел ведет себя как блокированная связь. Связь через муфты свободного хода В случае если один из моментов становится отрицательным, то весь момент M вх поступает на другой вал, а вал с отрицательным значением момента отключается.
Изображение слайда
8
Слайд 8
На автомобилях с одной ведущей осью, как правило, устанавливают симметричный дифференциал с передаточным числом между валами u 12 = 1, а также коэффициентом блокировки, близким к 1.
В таком случае, моменты на колесах правого и левого бортов практически равны ( M к1 ≈ M к2 ), и при прямолинейном движении можно говорить о равенстве окружных сил на колесах. Распределение крутящих моментов и
окружных сил по колесам
В ведомом режиме радиусы качения колес бортов оси и их окружные силы Р к = М к / r к0 обычно различаются не более чем на 2…3 %.
Распределение крутящих моментов и
окружных сил по колесам
В ведомом режиме радиусы качения колес бортов оси и их окружные силы Р к = М к / r к0 обычно различаются не более чем на 2…3 %.
Изображение слайда
9
Слайд 9
Предполагая, что при прямолинейном движении условия взаимодействия колес бортов оси с опорной поверхностью и их характеристики одинаковы М к1 = М к2, рассмотрим лишь влияние межосевого привода на распределение моментов и сил. Проведем оценку распределения мощности на примере прямолинейного движения и деления момента между мостами (не рассматривая бортовые связи ). Распределение крутящих моментов и окружных сил по колесам В многоприводных КМ возможно много вариантов схем трансмиссий, которые приводят к различному распределению моментов и сил.
Изображение слайда
10
Слайд 10
Распределение крутящих моментов и окружных сил по колесам Можно выделить три схемы трансмиссии Дифференциальная трансмиссия Блокированная трансмиссия Смешанная трансмиссия (дифференциально-блокированная)
Изображение слайда
11
Слайд 11
Например, на трехосной КМ момент М вх, поступающий на раздаточную коробку, распределяется в соотношении:
1/3 от М вх на первую ось;
2/3 от М вх на заднюю тележку с двумя осями,
т. е. передаточное число между ними u 1-23 = 2.
Тогда крутящие моменты на всех колесах одинаковы:
M к i = М к = const.
В этом случае КМ имеет полностью дифференциальную схему трансмиссии с k бл = 1.
В соответствии с характеристиками дифференциалов возможны следующие варианты:
1. Во всех узлах разветвлений установлены симметричные дифференциалы u 12 = 1 с k бл = 1 или в некоторых узлах установлены несимметричные дифференциалы u 12 ≠ 1 с k бл = 1.
Дифференциальная трансмиссия
е. передаточное число между ними u 1-23 = 2.
Тогда крутящие моменты на всех колесах одинаковы:
M к i = М к = const.
В этом случае КМ имеет полностью дифференциальную схему трансмиссии с k бл = 1.
В соответствии с характеристиками дифференциалов возможны следующие варианты:
1. Во всех узлах разветвлений установлены симметричные дифференциалы u 12 = 1 с k бл = 1 или в некоторых узлах установлены несимметричные дифференциалы u 12 ≠ 1 с k бл = 1.
Дифференциальная трансмиссия
Изображение слайда
12
Слайд 12
Дифференциальная трансмиссия 2. В узлах разветвления установлены самоблокирующиеся дифференциалы с k бл ≠ 1. В этом случае отношение моментов изменяется в зависимости от коэффициента k бл, однако до достижения отношения моментов дифференциальные связи ведут себя как блокированные.
Изображение слайда
13
Слайд 13
Блокированная трансмиссия
При установившемся прямолинейном движении КМ линейные скорости колес всех осей равны между собой:
v к xi = v м x = const. Тогда при различных радиусах качения колес в ведомом режиме r кв i и коэффициентах тангенциальной эластичности λ Mi, обусловленных допуском на изготовление шин, различным давлением воздуха p wi и нормальной нагрузкой P zi, радиусы качения колес должны выравниваться:
Полностью блокированная трансмиссия обеспечивает равенство угловых скоростей колес
ω к i = ω к = const.
Тогда при различных радиусах качения колес в ведомом режиме r кв i и коэффициентах тангенциальной эластичности λ Mi, обусловленных допуском на изготовление шин, различным давлением воздуха p wi и нормальной нагрузкой P zi, радиусы качения колес должны выравниваться:
Полностью блокированная трансмиссия обеспечивает равенство угловых скоростей колес
ω к i = ω к = const.
Изображение слайда
14
Слайд 14
Блокированная трансмиссия При прямолинейном движении по твердой ОП суммарное сопротивление движению невелико, продольные реакции и моменты на колесах также малы и непосредственное их скольжение отсутствует. В этом случае изменение радиуса качения подчиняется линейному закону r к = r к0 = r кв – l M М к = const. Моменты на колесах определяются выражением : ( * )
Изображение слайда
15
Слайд 15
Блокированная трансмиссия Приравняв сумму моментов M к i к суммарному моменту M км, поступающему на колеса КМ, и решив полученное уравнение относительно радиуса качения, имеем Подставив радиус r к0 в выражение ( * ), получим формулу для определения крутящего момента j -го колеса при полностью блокированной трансмиссии :
Изображение слайда
16
Слайд 16
Блокированная трансмиссия
Значения M к j могут быть положительными (направленными в сторону вращения колес), отрицательными или равными нулю. При положительном подводимом моменте M км > 0 и отрицательных моментах на колесах M к j < 0 происходит циркуляция крутящего момента ( мощности ) в замкнутом контуре колесо – ветвь трансмиссии – раздаточная коробка – другие ветви трансмиссии – другие колеса – ОП – колесо.
Без учета потерь циркулирующий момент численно равен крутящим моментам колес, на которых моменты отрицательны. Следовательно, мощность поступает не от трансмиссии к колесам, а наоборот, от колес — в трансмиссию.
При положительном подводимом моменте M км > 0 и отрицательных моментах на колесах M к j < 0 происходит циркуляция крутящего момента ( мощности ) в замкнутом контуре колесо – ветвь трансмиссии – раздаточная коробка – другие ветви трансмиссии – другие колеса – ОП – колесо.
Без учета потерь циркулирующий момент численно равен крутящим моментам колес, на которых моменты отрицательны. Следовательно, мощность поступает не от трансмиссии к колесам, а наоборот, от колес — в трансмиссию.
Изображение слайда
17
Слайд 17
Блокированная трансмиссия Циркуляция мощности – вредное явление, приводящее к дополнительному увеличению нагрузок, потерям в трансмиссии и шинах, и, как следствие, большому износу деталей и узлов, расходу топлива, ухудшению устойчивости движения. Начало циркуляции момента определяется условием
Изображение слайда
18
Слайд 18
Блокированная трансмиссия
Вероятность возникновения циркуляции момента (мощности) снижается с уменьшением разности радиусов качения r кв i в ведомом режиме, увеличением тангенциальной эластичности λ Mi, шин и повышением сопротивления движению M км.
Изображение слайда
19
Слайд 19
Вариантов дифференциально-блокированной трансмисс и и в многоосных КМ может быть множество в зависимости от числа ведущих осей. Общую формулу для определения крутящих моментов при всех возможных схемах такой трансмиссии выводить нерационально, поскольку она получается очень громоздкой. Обычно решают частные задачи для конкретных схем. Смешанная трансмиссия (дифференциально-блокированная)
Изображение слайда
20
Слайд 20
Смешанная трансмиссия (дифференциально-блокированная) Так, для схемы трансмиссии КМ 8×8 с симметричными дифференциалами между колесами тележек ( k бл I и k бл II ) и блокированной ( Бл ) связью между тележками можно записать:
Изображение слайда
21
Последний слайд презентации: ТЕОРИЯ ДВИЖЕНИЯ ВОЕННЫХ КОЛЕСНЫХ МАШИН Слайды к лекциям по курсу Лекция 9
Смешанная трансмиссия (дифференциально-блокированная)
Для большинства задач со сложными схемами трансмиссии наиболее эффективен метод последовательных приближений, при котором, например, изменяя радиус качения колес первой оси r к0 1 и определяя с учетом уравнений связи моменты М к i и их сумму, добиваются равенства ее моменту M км сопротивления движению с заданной точностью.
Изображение слайда
Мирошниченко, А. Н. Теория движения автомобиля.
Мирошниченко, Александр Николаевич. Теория движения автомобиля : [учебное пособие : для вузов по специальностям «Автомобили и автомобильное хозяйство» и «Сервис транспортных и технологических машин и оборудования (Автомобильный транспорт)» направления подготовки «Эксплуатация наземного транспорта и транспортного оборудования»и направления подготовки бакалавров «Эксплуатация транспортных средств»] / А. Н. Мирошниченко. — Томск : Издательство Томского государственного архитектурно-строительного университета, 2011. — 299 с. : ил. ; 21 см. — Библиогр. в конце кн.
ISBN 978-5-93057-435-7
Содержание :
- Предисловие.
- ГЛАВА 1. Динамичность автомобиля.
- Взаимодействие колеса с твердой опорной поверхностью.
- Динамика и кинематика колеса.
- Радиусы колеса.
- Мощностной баланс колеса.
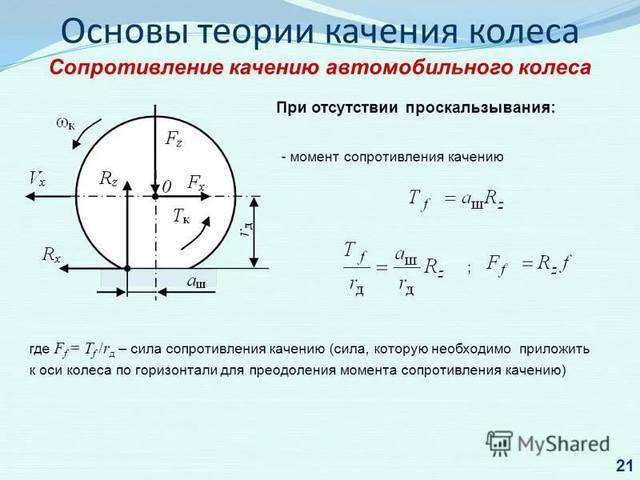
- Сопротивление качению колеса.
- Ограничения сил, действующих на колеса.
- Силы, действующие на автомобиль, при прямолинейном движении по твердой опорной поверхности.
- Классификация сил.
- Сила тяги.
- Двигатель и его характеристики.
- Коэффициент полезного действия трансмиссии.
- Сила сопротивления качению автомобиля.
- Сила сопротивления подъему автомобиля. Сила сопротивления дороги.
- Сила сопротивления воздуха.
- Уравнение движения автомобиля.
- Нормальные реакции опорной поверхности, действующие на колеса автомобиля.
- Условия, необходимые для движения автомобиля.
- Тягово-скоростные свойства автомобилей.
- Определения и оценочные показатели.
- Аналитические решения уравнения тягового баланса.
- Тяговая характеристика автомобиля.
- Динамический фактор и динамическая характеристика автомобиля.
- Мощностной баланс и мощностная характеристика автомобиля.
- Использование мощности двигателя.

- Тяговая, динамическая и мощностная характеристики автомобиля с учетом естественного проскальзывания шин.
- Расчет показателей динамичности.
- Движение автомобиля накатом.
- Приемистость автомобиля.
- Средняя скорость движения.
- Влияние основных параметров конструкции автомобиля на его динамичность.
- Полная масса автомобиля.
- Форма внешней скоростной характеристики двигателя внутреннего сгорания.
- Минимальное передаточное число механической трансмиссии.
- Количество ступеней механической трансмиссии.
- Максимальное передаточное число механической трансмиссии.
- Промежуточные ступени трансмиссии.
- Проектировочный тяговый расчет автомобиля.
- Задачи тягового расчета и исходные данные.
- Определение мощности двигателя.
- Выбор передаточных чисел трансмиссии.
- Тормозные свойства автомобиля.
- Определение и оценочные показатели.
- Силы и моменты, действующие на колеса автомобиля при торможении.
- Уравнение движения автомобиля в тормозном режиме.
- Распределение тормозных сил по осям автомобиля.
- Тормозная диаграмма и остановочный путь автомобиля.
- Контрольные вопросы.
- ГЛАВА 2. Топливная экономичность автомобиля.
- Измерители и оценочные показатели топливной экономичности.
- Уравнение расхода топлива.
- Топливная характеристика установившегося движения.
- Расход топлива на единицу транспортной работы.
- Нормы расхода топлива.
- Контрольные вопросы.
- ГЛАВА 3. Управляемость и устойчивость автомобиля.
- Управляемость автомобиля.
- Основные понятия.
- Криволинейное движение (поворот) автомобиля.
- Соотношение углов поворота управляемых колес.
- Стабилизация передних управляемых колес.
- Явление увода колеса под действием боковой силы.
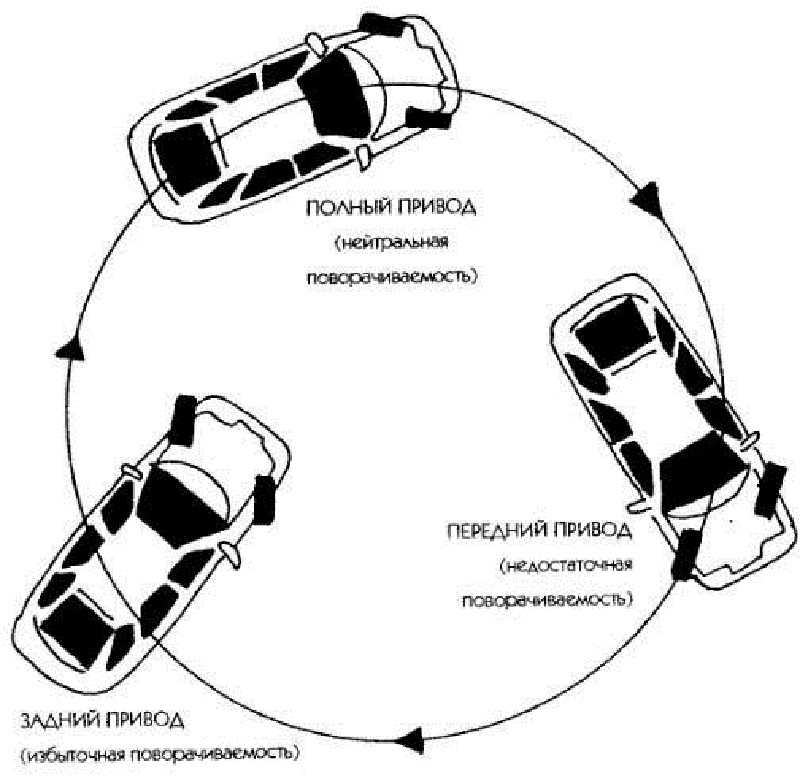
- Поворачиваемость автомобиля.
- Критическая скорость движения автомобиля по условиям управляемости.
- Кинематический увод эластичных колес.

- Гироскопический эффект.
- Влияние способа крепления рессор на управляемость автомобиля.
- Колебания управляемых колес.
- Чувствительность автомобиля к повороту.
- Устойчивость автомобиля.
- Продольная устойчивость автомобиля.
- Поперечная устойчивость автомобиля.
- Поперечная устойчивость автомобиля против скольжения.
- Поперечная устойчивость автомобиля на дороге с поперечным уклоном.
- Поперечная устойчивость автомобиля при его повороте на горизонтальной поверхности.
- Влияние крена кузова автомобиля на его устойчивость против опрокидывания.
- Контрольные вопросы.
- ГЛАВА 4. Плавность хода автомобиля.
- Основные понятия и определения.
- Колебательная система с одной степенью свободы.
- Приведенная жесткость подвески.
- Автомобиль как колебательная система.
- Свободные затухающие колебания.
- Вынужденные колебания.
- Кинематическое воздействие на колебательную систему.

- Вынужденные колебания под действием сложных сил.
- Гармонический анализ.
- Интегральное преобразование Фурье.
- Воздействие микропрофиля дороги на автомобиль.
- Спектральный анализ воздействия микропрофиля дороги.
- Краткие сведения из теории вероятностей.
- Случайные функции и их характеристики.
- Вынужденные колебания подвески автомобиля при случайном характере воздействия микропрофиля дороги.
- Основные сведения из теории операционного исчисления.
- Некоторые свойства изображений.
- Передаточная функция колебательной системы.
- Расчет параметров подвески.
- Контрольные вопросы.
- ГЛАВА 5. Проходимость автомобиля.
- Понятия и определения.
- Взаимодействие колеса с деформируемой опорной поверхностью.
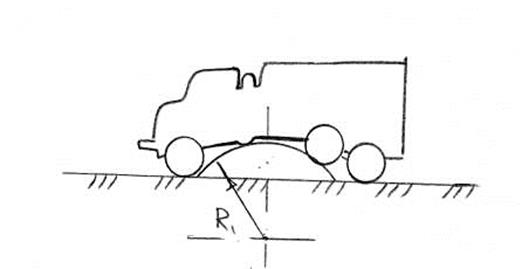
- Преодоление пороговых препятствий.
- Профильная проходимость.
- Оценка опорной проходимости.
- Контрольные вопросы.
- Заключение.
- Краткий перечень используемых терминов.

- Библиографический список.
Ключевые слова
АВТОМОБИЛИ, ДИНАМИЧНОСТЬ, ТОПЛИВНАЯ ЭКОНОМИЧНОСТЬ, УПРАВЛЯЕМОСТЬ, УСТОЙЧИВОСТЬ, ПРОХОДИМОСТЬ, ТЕОРИЯ ДВИЖЕНИЯ, АВТОМОБИЛЬНЫЙ ТРАНСПОРТ, УЧЕБНЫЕ ИЗДАНИЯ ДЛЯ ВУЗОВ
ОГРАНИЧЕННЫЙ ПРОСМОТР : общий вид издания, доступ к аннотации и содержанию.
Источник : ТОУНБ им. А. С. Пушкина.
Теги: 01 — ТЕХНИКА, ТЕХНИЧЕСКИЕ НАУКИ 02 — Транспорт 03 — автодорожный транспорт 07 — КНИГИ 08 — ИЗДАНИЯ 21 ВЕКА 08 — учебные издания 12 — Томская книга (2011) 13 — Издательство ТГАСУ
Concept ‹ SphericalDriveSystem
Дизайнерские идеи: По мере того, как проект становится более определенным, дизайнерские идеи и эскизы со временем будут меняться, но наши текущие идеи и концептуальные чертежи/модели САПР будут размещены здесь.
Предыстория: Идея системы сферического привода не похожа ни на одно другое транспортное средство, которое можно увидеть на дороге сегодня. Несмотря на то, что вы видели транспортные средства со сферическим приводом в футуристических фильмах, таких как IRobot, не было сильного толчка в царство сфер. Мы верим, что универсальность сферического привода может дать нам совершенно новую степень свободы и безопасности, которую нам еще предстоит открыть. В рамках годичного проектного класса для Университета штата Сан-Хосе мы будем применять всю инженерную теорию/концепции, чтобы превратить амбициозную и нестандартную идею в физический и рыночный продукт. К концу учебного года конечный продукт будет иметь все необходимое аппаратное и программное обеспечение, чтобы обеспечить самобалансировку и маневрирование в любом направлении на малых скоростях. Несмотря на то, что были разработаны системы балансировки, добавление еще одной степени свободы увеличивает как сложность, так и возможность мгновенного отклика.
Несмотря на то, что вы видели транспортные средства со сферическим приводом в футуристических фильмах, таких как IRobot, не было сильного толчка в царство сфер. Мы верим, что универсальность сферического привода может дать нам совершенно новую степень свободы и безопасности, которую нам еще предстоит открыть. В рамках годичного проектного класса для Университета штата Сан-Хосе мы будем применять всю инженерную теорию/концепции, чтобы превратить амбициозную и нестандартную идею в физический и рыночный продукт. К концу учебного года конечный продукт будет иметь все необходимое аппаратное и программное обеспечение, чтобы обеспечить самобалансировку и маневрирование в любом направлении на малых скоростях. Несмотря на то, что были разработаны системы балансировки, добавление еще одной степени свободы увеличивает как сложность, так и возможность мгновенного отклика.
| Робот-автомобиль (использующий сферический привод) | Segway Персональный транспорт |
Теория: Человеческий подход к работе приводной системы ничем не отличается от того, как вы балансируете на велосипеде или на любой неустойчивой поверхности, получая инерционную обратную связь, когда вы собираетесь упасть, и исправляя соответственно. С инженерной точки зрения проблема представляет собой стандартную задачу управления, которая заменит человека акселерометрами/гироскопами, а человеческую коррекцию — приводными двигателями. Система, по образцу которой будет смоделирован этот проект, называется перевернутым маятником, целью которого является удержание изначально неустойчивой системы от перехода в стабильное состояние за счет почти мгновенной реакции на внешние возмущения. Ball Inverted Pendulum вдохновляет нас и показывает некоторые внутренние механизмы возможных решений нашей дизайнерской проблемы. Реализация: Проект можно разбить на несколько основных компонентов, в которых каждый член команды будет нести особую ответственность за обеспечение надлежащего функционирования транспортного средства. Список компонентов можно увидеть ниже:
С инженерной точки зрения проблема представляет собой стандартную задачу управления, которая заменит человека акселерометрами/гироскопами, а человеческую коррекцию — приводными двигателями. Система, по образцу которой будет смоделирован этот проект, называется перевернутым маятником, целью которого является удержание изначально неустойчивой системы от перехода в стабильное состояние за счет почти мгновенной реакции на внешние возмущения. Ball Inverted Pendulum вдохновляет нас и показывает некоторые внутренние механизмы возможных решений нашей дизайнерской проблемы. Реализация: Проект можно разбить на несколько основных компонентов, в которых каждый член команды будет нести особую ответственность за обеспечение надлежащего функционирования транспортного средства. Список компонентов можно увидеть ниже:
- Колеса — Рождение этого проекта связано с идеей иметь транспортное средство, которое может двигаться в любом направлении, и с необходимостью возникла идея заново изобрести колесо, буквально.
 В конструкции транспортного средства не используются обычные колеса, а вместо них используются сферы. Уникальная способность сфер одновременно катиться и вращаться наделяет транспортное средство поистине всенаправленной маневренностью. Проблема, с которой мы столкнемся, заключается в том, что система привода будет находиться в контакте в различных точках сферы, но сама сфера не может иметь никаких ограничений, за исключением нескольких точек контакта, чтобы удерживать ее в корпусе транспортного средства.
В конструкции транспортного средства не используются обычные колеса, а вместо них используются сферы. Уникальная способность сфер одновременно катиться и вращаться наделяет транспортное средство поистине всенаправленной маневренностью. Проблема, с которой мы столкнемся, заключается в том, что система привода будет находиться в контакте в различных точках сферы, но сама сфера не может иметь никаких ограничений, за исключением нескольких точек контакта, чтобы удерживать ее в корпусе транспортного средства. - Приводная система — Эта система отличается от любого другого всенаправленного транспортного средства, в котором передача на колеса осуществляется с помощью фиксированной оси, сферическая природа колеса означает, что передача мощности для движения должна осуществляться исключительно за счет контактного трения. . Для создания надежной системы эффект износа фрикционных ведущих колес для непараллельных направлений должен быть минимальным. Этот метод управления транспортным средством сопряжен со многими проблемами и потенциалом для больших инноваций в создании трансмиссии с нефиксированной осью.
 Для достижения желаемых скоростей и крутящего момента от транспортного средства вполне вероятно, что для привода будут использоваться либо шаговые двигатели, либо двигатели BLDC.
Для достижения желаемых скоростей и крутящего момента от транспортного средства вполне вероятно, что для привода будут использоваться либо шаговые двигатели, либо двигатели BLDC. - Система управления – Система, которая будет использоваться для управления транспортным средством, не является тривиальной задачей. Принцип работы системы управления заключается в считывании показаний датчика с комбинированного гироскопа и акселерометра и определении соответствующей реакции на основе ввода пользователя, а также в поддержании стабильности. Проблемы, связанные с системой управления, включают попытку сбалансировать изначально нестабильную систему, взаимодействие с несколькими приводными двигателями и объединение потенциально шумных показаний датчиков, таких как показания акселерометра, во что-то полезное и надежное. Непосредственной задачей системы управления будет поддержание баланса и маневренности на малых скоростях с учетом модифицированного управления на высоких скоростях.
- Управление питанием – Большое количество электроники на борту транспортного средства будет означать, что потребуется очень интеллектуальный и надежный способ получения энергии по мере необходимости. Система управления питанием должна будет хранить энергию на носителе (скорее всего, это будут батареи LiPo) и иметь возможность распределять энергию на двигатели, контроллеры и датчики. В дополнение к управлению распределением мощности, система также должна будет контролировать себя на предмет любых потенциальных неисправностей, а также легкость подзарядки от источника высокого напряжения (например, от сети 120 В). Система управления питанием является сердцем этого проекта, и ее необходимо будет построить и подобрать для остальных систем автомобиля.
- Конструкция рамы и кузова — Несмотря на то, что в автомобиле используется очень уникальная система привода, в других аспектах он по-прежнему остается мотоциклом. Чтобы обеспечить непревзойденную универсальность для нашего приложения, мы разработаем совершенно новую раму, в которой будет предусмотрено место для аккумуляторной системы, IMU, карт управления и место для размещения двигателей, которые мы будем использовать для управления транспортным средством.
 В то время как в обычных мотоциклах используется один задний маятник, в этом автомобиле также будет использоваться передний маятник, что представляет собой интересную проблему с точки зрения механической конструкции. Внешний корпус автомобиля будет изготовлен с использованием стекловолокна и углеродного волокна, чтобы снизить вес без ущерба для прочности и эстетики.
В то время как в обычных мотоциклах используется один задний маятник, в этом автомобиле также будет использоваться передний маятник, что представляет собой интересную проблему с точки зрения механической конструкции. Внешний корпус автомобиля будет изготовлен с использованием стекловолокна и углеродного волокна, чтобы снизить вес без ущерба для прочности и эстетики.
Планирование на будущее: Несмотря на то, что ближайшей задачей проекта является создание транспортного средства, способного балансировать и маневрировать на низких скоростях, конечной целью является создание полностью функционального электромобиля, который сможет развивать скорость и запас хода, сравнимые с любое другое транспортное средство.
Теория геометрии рулевого управления и теория отклонения оси | Техническая теория
Определения и справочная информация
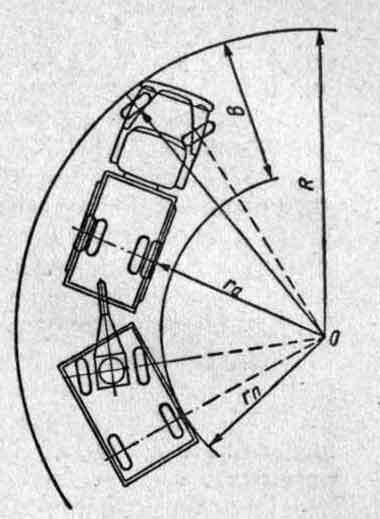
Характеристический угол, рассмотренный ранее, ставит колеса в точное положение во время движения транспортного средства по прямой линии, а также существует ряд особых эффектов, связанных с этими углами, когда транспортное средство преодолевает поворот,
При повороте колес создается еще одно очень важное условие, которое напрямую связано с радиусом проходимой кривой,
Чтобы понять это условие, лучше начать с рассмотрения колеса, которое движется с очень малой скоростью без помех, в этой ситуации на транспортное средство не действуют возмущающие силы, такие как, например, центробежная сила, боковая тяга от ветра, очень сильные разгонные тяги от двигателя и т. д.,
д.,
Непременным условием для предотвращения бокового сопротивления колеса, которое может сильно повредить протектор, является то, что при следовании по криволинейной траектории колесо должно находиться в положении, перпендикулярном радиусу колеса. сама кривая,
При повороте всей оси колеса, хотя и движутся по двум разным окружностям, должны оставаться в перпендикулярном положении к радиусам этих окружностей, чтобы они вращались вокруг одного и того же центра вращения,
Когда все транспортное средство поворачивается, что означает одновременное движение двух осей, должны соблюдаться одинаковые условия, а задняя ось должна поворачиваться вокруг одного и того же центра вращения,
Это условие может быть легко соблюдено, если при выполнении поворота поворачивается вся ось со штифтом в центральной точке, однако по очевидным причинам устойчивости и ограниченного пространства под шасси это невозможно сделать на автомобилях, на самом деле , автомобили управляются с помощью шарниров, образованных шкворнями, ступицы колес в этом случае ведут себя так, как если бы были две отдельные оси,
Но если оба колеса повернуты одинаково, на угол, по параллельным траекториям, то радиусы поворота, будучи параллельными, не могут сходиться в одном и том же центре, в этом случае не будет общего центра поворота и колесо будет сильно тянуть на поворотах,
Геометрия рулевого управления находится в положении схождения во время поворота, выражается в виде значения в градусах, на которое поворачиваются колеса, (учитывайте одно фиксированное значение на повороте в 20 градусов, установленное условно),
Пример
Внешнее колесо на повороте поворачивается на 20 градусов, а внутреннее колесо на 23 градуса или, наоборот, внутреннее колесо на повороте поворачивается на 20 градусов, а внешнее колесо на 17 градусов, в данном примере видно, что схождение на базе 20 градусов равно 3 градусам, взятым из разности (20 градусов — 17 градусов), или из разности (23 градуса — 20 градусов), таким образом, идеальное состояние следующее,
Радиус поворота
23 градуса
20 градусов
Угол тяги
Колеса, движущиеся по прямой линии, должны иметь значение схождения, близкое к 0 градусов, и как только они начинают поворачиваться, значение схождения должно постепенно увеличиваться, становясь более заметным с увеличением угла поворота. очередь,
очередь,
Параллелограммы рулевого управления
Это схождение колес, пропорциональное радиусу поворота, создается двумя рулевыми тягами, прикрепленными к шкворню, с четко определенными длинами и положениями, если, однако, две рулевые тяги образуют симметричную сочлененный рулевой параллелограмм с другими рулевыми тягами эти потребности не удовлетворят,
Асимметричные рулевые тяги
Рулевые тяги параллельны продольной оси автомобиля, и чтобы они оставались параллельными при повороте, то же самое происходит и с колесами, которые не могут принять необходимое положение схождения,
Схождение на повороте может быть достигнуто только в том случае, если две рулевые тяги образуют асимметричный параллелограмм с другими рулевыми тягами, что означает, что рулевые тяги сходятся к задней части автомобиля,
При асимметричном параллелограмме рулевого управления при выполнении поворота рулевые тяги следуют двум дугам разной окружности, это условие связывает геометрию рулевого управления передних колес (направленное) с положением задних колес (ненаправленное), в во избежание бокового сопротивления задних колес, если удлинение оси, проходящей через рулевые тяги, совпадает точно с центром задней оси,
Таким образом, угол поворота рулевых тяг становится функцией колеи и колесной базы транспортного средства, и, следовательно, отношение рулевых тяг должно быть равно их длине,
После выполнения этих теоретических условий колеса при повороте занимают положение, перпендикулярное радиусу их криволинейной траектории, и не подвергаются никакому боковому сопротивлению, которое так повреждает протектор,
Центрирование направления
Под центрированием направления понимают идеальное симметричное состояние направляющих частей по отношению к продольной оси транспортного средства,
Направление транспортного средства центрировано, когда
А) рулевые тяги сходятся к центру задней оси,
Б) оси, проходящие через задние колеса (независимо от их схождения), симметричны по отношению к передним колесам,
В) рулевое управление рулевая тяга, рулевой механизм. и возврат рулевого управления находятся в среднем положении,
и возврат рулевого управления находятся в среднем положении,
D) регулируемые рулевые тяги имеют одинаковую длину,
E) рулевое колесо находится в симметричном положении,
Когда направление центрировано, геометрия рулевого управления совершенна и симметрична, независимо от того, поворачиваете ли вы влево или вправо, то же самое относится к максимальным пределам поворота колес,
Поскольку центрирование направления включает в себя большое количество частей транспортного средства, как при движении по прямой, так и при поворотах, и тогда это очень важный фактор, который необходимо проверить,
Отклонение оси
Теоретическое состояние, при котором проекция передних колес на заднюю ось симметрична, рулевое колесо и рулевой механизм находятся в центре диапазона их движения, а регулируемые рулевые тяги имеют симметричную длину, не всегда может быть соблюдено из-за к возникновению деформаций или отклонений от оси, вызванных ударами различной интенсивности. Эти отклонения можно сгруппировать в три типа классов, хотя есть некоторые виды отклонений, которые можно выявить и устранить только с помощью систем, связанных с рамой и, или, шасси,
Эти отклонения можно сгруппировать в три типа классов, хотя есть некоторые виды отклонений, которые можно выявить и устранить только с помощью систем, связанных с рамой и, или, шасси,
1) передняя ось наклонена по отношению к продольной оси транспортного средства, из-за сопротивления движению вперед, встречаемого направленными колесами, они займут симметричное положение по отношению к задней оси, естественно, это предполагается, что колеса связаны системой рулевой тяги,
В дороге может случиться так, что руль и рулевое управление сместятся из центра их общего диапазона движения, для восстановления центра рулевого управления необходимо укоротить одну регулируемую рулевую тягу и удлинить другую, что сразу деформирует рулевой параллелограмм,
Однако, когда отклонение оси превышает 1 градус, неизбежно нарушается геометрия рулевого управления Задняя ось наклонена по отношению к продольной оси до значения (А) на дороге, передние колеса занимают симметричное положение с их проекции на задние колеса (А) и (А) равны, значит, рулевые тяги, центр рулевого управления и центр рулевого колеса также являются штатными,
В этом случае задние колеса подвергаются отрицательному сносу (UK), соответственно, вызывая неравномерный износ, ориентация в этом направлении действительна до тех пор, пока угол (B) не превышает 30′, после чего транспортное средство становится чувствительным к коэффициенту тяги, выражается соотношением,
(Б)
Тяга привода
Масса автомобиля
Если это отношение велико, направляющие колеса переходят в угловое положение, симметричное новой оси (а не колесам), созданное задними колесами, как описано в следующем случае,
Это отклонение происходит в ущерб центру рулевого управления и центру рулевого колеса, и его невозможно компенсировать, так как оно динамическое, этот характерный эффект может ощущаться на дороге, когда под действием активной тяги двигателя рулевое колесо меняет свою ориентацию сам по себе,
Существует поперечное ненаклонное отклонение между двумя осями,
Передние колеса поворачиваются на симметричный угол (%), который находится уже не по отношению к задним колесам, а по отношению к их оси, что означает, что на дороге передние колеса находятся в состоянии наименьшего сопротивления,
Исключение из этого условия направленного положения может возникнуть, когда из-за неравномерного распределения веса на транспортном средстве создается пара сил, которая заставляет передние колеса поворачиваться в ущерб центру рулевого управления и центру рулевого колеса.
Кто изобрел колесо? — Краткая история
Кто изобрел колесо и когда? На самом деле колесо может быть не таким старым, как вы думаете! Знаете ли вы, что искусство, гончарное дело, флейта, вино и косметика были изобретены до появления колеса?
TL;DR
Самое раннее свидетельство существования колеса….
4200–4000 гг. до н.э., они использовались для изготовления гончарных изделий. Поскольку колесо было изобретено до того, как велись записи, никто никогда не сможет узнать, кто изобрел колесо. Самые ранние колесные транспортные средства появились где-то между 3500–3350 годами до нашей эры. Изобретение было быстро принято в некоторых частях Европы и Азии. До этого сани использовались для перемещения больших и тяжелых предметов по суше. Одомашнивание лошадей и дорожная инфраструктура сыграли ключевую роль в принятии колеса как вида транспорта.
Кто изобрел колесо?
Поскольку колесо было изобретено до того, как велись записи, никто не может знать, кто изобрел колесо , или даже какое племя придумало его. Однако широко распространено мнение, что древние жители Месопотамии изобрели колесо примерно в 4200–4000 годах до н.
Однако широко распространено мнение, что древние жители Месопотамии изобрели колесо примерно в 4200–4000 годах до н.
Карта, показывающая границы Месопотамии.
Первые колеса на самом деле были гончарными кругами и не использовались для транспортировки, известные как «турнеты» или «медленные колеса».
Один археолог заявил, что нашел свидетельство игрушечной каменной «машины», датируемой примерно 5500 годом. Однако доказательства этой даты остаются неясными и оригинальная публикация была удалена.
Как они перемещали большие предметы перед колесом?
До изобретения колеса большие/тяжелые предметы обычно тащили какая-то форма саней.
мегалиты, перемещенные островом Ниас у западного побережья Суматры, Индонезия — около 1915 — Collectie Stichting National Museum van Wereldculturen
Теперь вы можете подумать: «Но эй, памятники вроде Стоунхенджа (3000 г. до н.э.) использовали грубую, раннюю форму колеса: бревна, чтобы катить камни по земле!» Однако, как ни странно, археологи все чаще начинают думать, что эти камни на самом деле перемещались с помощью салазок с какой-либо смазкой, например свиным салом. То же самое относится и к пирамидам (2589 г.и 2504 г. до н.э.), одна из теорий предполагает, что большие камни тащили на санях, а на песок поливали воду, чтобы уменьшить трение.
до н.э.) использовали грубую, раннюю форму колеса: бревна, чтобы катить камни по земле!» Однако, как ни странно, археологи все чаще начинают думать, что эти камни на самом деле перемещались с помощью салазок с какой-либо смазкой, например свиным салом. То же самое относится и к пирамидам (2589 г.и 2504 г. до н.э.), одна из теорий предполагает, что большие камни тащили на санях, а на песок поливали воду, чтобы уменьшить трение.
Когда был изобретен первый колесный транспорт?
Где-то около 3500–3350 гг. до н. э. года первые колесные транспортные средства появились в некоторых частях Европы и Азии . Никто точно не знает, было ли это одновременным изобретением или быстрым внедрением новой технологии.
Опять же, поскольку записи не велись, мы никогда не сможем знать наверняка имя первого мужчины или женщины, использовавших колесо для передвижения.
Горшок Броноцице, найденный в неолитической деревне в Польше. 3635–3370 гг. до н.э., изображает то, что считается самым ранним известным изображением колесного транспортного средства. Транспортное средство нарисовано в виде сверху вниз, а колеса нарисованы сбоку. Силар / CC BY-SA
3635–3370 гг. до н.э., изображает то, что считается самым ранним известным изображением колесного транспортного средства. Транспортное средство нарисовано в виде сверху вниз, а колеса нарисованы сбоку. Силар / CC BY-SA
Ранние колесные транспортные средства почти наверняка были четырехколесными . Самые ранние из известных изображений колесных транспортных средств: бронзовый горшок, найденный в неолитической деревне в 9 г.0005 Польша. 3635–3370 гг. до н.э. г. , и несколько глиняных табличек, найденных в г. Урук — Ирак г. . Оба иллюстрируют 4-колесные транспортные средства, датированные приблизительно 90 005 3300-3100 гг. до н.э. г. до н.э.
Эти символы, хотя и несколько грубые, найденные на нескольких глиняных табличках — Урук — Ирак указывают на использование колесных повозок. Многие похожие символы без колес можно найти на одних и тех же наборах планшетов. Датируется примерно 3300-3100 годами до нашей эры.
Датируется примерно 3300-3100 годами до нашей эры.
Недалеко от Киля в Германии была обнаружена серия параллельных следов, которые датируются примерно 3420–3385 годами до нашей эры. Поскольку следы «шаткие», археологи полагают, что это следы от колесной машины, а не от саней.
Чуть позже появились двухколесные транспортные средства . Первое известное изображение датировано 3402—2800 до н.э. и было найдено в могильной галерее, в Лоне-Энгельшеке, Германия .
Почему так долго не изобретали велосипед?
Хотя эта концепция может показаться очень простой нам, обезьянам 21-го века. Колесо — это чисто человеческое изобретение, то есть оно нигде не встречается в природе. Такие факторы, как дорожная инфраструктура и приручение крупных животных, способных тянуть колесные транспортные средства, например. лошади также сыграли ключевую роль в принятии колеса.
Эволюция колеса
Хотя первые колеса, скорее всего, были цельными дисками или даже нарезанными стволами деревьев. Они недолго оставались такими.
Они недолго оставались такими.
Колеса со спицами
Колесо со спицами было изобретено около 2000 г. до н.э. в Анатолии (Турция) . Спицы сделали колеса легче, что дало «Синташте» преимущество в бою. Колеса со спицами были найдены в могилах, датируемых 2100–1800 годами до нашей эры.
Колеса со спицами не появлялись до 9 0005 1870-е . За это мы должны благодарить изобретение велосипеда.
Оси
В Швейцарии и Германии первые колеса крепились к вращающейся оси на квадратном пазу. Это означает, что колеса вращались вместе с осью. Однако в других местах ось была зафиксирована, а колеса вращались независимо. Свободно вращающаяся конструкция колес имела явное преимущество при прохождении поворотов.
Шины
Шина, пожалуй, еще одно изобретение шотландцев.
Кельтские колесницы (800–450 гг. до н.э.) являются первыми известными примерами, в которых использовался железный обод вокруг колеса.
Первый патент на пневматическую шину был выдан в 1847 шотландским изобретателем Робертом Уильямом Томсоном. Первая серийная шина была изготовлена в 1888 на Мэй-стрит в Белфасте другим шотландцем: Джоном Бойдом Данлопом. Он разработал его, чтобы уменьшить головную боль, которую испытывал его сын при езде на трехколесном велосипеде.
Колесо за пределами Европы и Азии
Еще в 1500 г. до н.э. коренные народы Северной Америки использовали колеса для создания игрушек , таких как животные с колесиками на ногах. Однако колесо широко не использовалось для перевозки до прибытия европейских поселенцев. Одним из объяснений этого является то, что до этого момента в Америке не было одомашненных животных, пригодных для буксировки транспортных средств.
Игрушки на колесах, похожие на эту, были найдены в северной части Северной Америки задолго до того, как колеса стали использоваться в качестве транспорта. Этот конкретный пример — древнегреческая детская игрушка. Из гробницы 950-900 гг. до н.э. Археологический музей Керамейкос в Афинах. Викисклад.
Этот конкретный пример — древнегреческая детская игрушка. Из гробницы 950-900 гг. до н.э. Археологический музей Керамейкос в Афинах. Викисклад.
В Африке колесо почти не использовалось за пределами северо-восточного угла. Египет быстро принял колесо. Еще в 400 г. до н.э. нубийцы использовали колеса для прядения глиняной посуды и водяные колеса.
Тачки
Китайский народный закон относит первую тачку к началу первого века , хотя первое известное свидетельство тачки было обнаружено в гробнице Шэнь Фуцзюня в провинции Сычуань. Он датируется примерно годом 150 года 9000 года нашей эры.
Эта картина является не только одним из самых ранних изображений колесных транспортных средств и тачек, но и одним из самых ранних примеров рисунка в изометрическом стиле!
Чжан Цзэдуань, «Цинмин шанхэ ту». Фу Синянь, изд. Чжунго мейшу цюаньцзи, Лян Сун хуэйхуа, шан (серия, том 3). пл. 51, стр. 130-131, 134. Собрание Национального дворца-музея, Пекин. Отредактировано для цвета и контраста.
пл. 51, стр. 130-131, 134. Собрание Национального дворца-музея, Пекин. Отредактировано для цвета и контраста.
Первые тачки имели переднее колесо, аналогичное современному дизайну, с которым мы знакомы. Однако в 3 веке нашей эры одноколесная тачка с центральным креплением стала более популярной. Сообщается, что эта конструкция могла перевозить до 6 человек!
Парусная тачка с одним центральным колесом. Широко используемая по всему Китаю
Была также довольно интригующая конструкция тачки с парусным двигателем , широко используемая по всему Китаю, которая, как считается, восходит к 6 веку нашей эры. Первое документальное свидетельство найдено в трудах Андреаса Эверардуса ван Браама Хокгеста — 1797 года нашей эры.
За пределами Китая первые тачки найдены в Европе приблизительно 1170-1250 гг. н.э. .
Кто изобрел колесо обозрения?
Хотя Джордж Вашингтон Гейл Феррис-младший является первым человеком, которому приписывают изобретение своего тезки: колеса обозрения для Всемирной Колумбийской ярмарки в Чикаго в 1893 году нашей эры. Происхождение колеса обозрения восходит к 17 веку нашей эры в Болгарии . Они были известны как «колеса удовольствия» или «взлеты и падения». Пассажиры ехали в креслах, подвешенных к вращающимся подмосткам, поворачиваемым вручную.
Происхождение колеса обозрения восходит к 17 веку нашей эры в Болгарии . Они были известны как «колеса удовольствия» или «взлеты и падения». Пассажиры ехали в креслах, подвешенных к вращающимся подмосткам, поворачиваемым вручную.
Ранний пример колеса обозрения. Волшебный город, Париж, 1913 год. — Bibliothèque nationale de France
Первое колесо обозрения было спроектировано так, чтобы соперничать с Эйфелевой башней. Он был 80,4 м (250 футов) в диаметре и, как сообщается, перевозил 2160 человек.
«Оригинальное колесо обозрения» на Всемирной Колумбийской выставке 1893 года в Чикаго. Фотоархив The New York Times
Колеса для хомяков середина 1930-е годы нашей эры. Итак, колесо, на котором бегает ваш пушистый друг, вероятно, более современно, чем вы думаете! Однако это не единственное животное, которое бегает в колесе.
Вертел собака работает Генри Вигстед (1799 г. н.э.)
н.э.)
Колеса животных также использовались в качестве функциональных объектов. Между 16 и 19 веками нашей эры собака-вертел использовалась на кухнях по всей Британии, чтобы обеспечить равномерное приготовление мяса на вертеле. Однако изобретение дешевых вертелов (часовых домкратов) означало, что порода вертелов была потеряна для страниц истории.
Колеса не только для домашних животных! Ученые обнаружили, что даже дикие животные любят бегать на колесе. В эксперименте с «диким» колесом лягушка, несколько мышей и даже слизняк покрутились на колесе!
Дополнительная литература:
- Игрушки на колесах в Мексике
- Колесо, бегущее по дикой природе
- Вертел собака
- Массивные мегалиты Стоунхенджа, возможно, были перемещены на место с помощью свиного сала
- Решено! Как древние египтяне перемещали массивные камни пирамид
- Изобретение колеса и колесных транспортных средств
- Социальная сложность в доисторической Евразии: памятники, металлы и мобильность
- Горшок Bronocice — wiki
- Некоторые заметки о пиктограммах, интерпретируемых как колесные сани и повозки в архаических текстах из Урука.
