Преимущества автомобилей с гидромеханическими коробками передачами
Условия работы водителя автомобиля все время усложняются из-за увеличения количества автомобилей и из-за роста грузовых и пассажирских потоков. Возникла необходимость облегчения работы водителя и повышения ее эффективности при одновременном повышении безопасности движения. Мощным средством решения этих сложных задач стала автоматизация управления автомобилем путем применения автоматических трансмиссий.
Самым распространенным видом автомобильной автоматической трансмиссии стала гидромеханическая передача. Из-за широкого распространения именно ее за рубежом называют «автоматическая трансмиссия».
Гидромеханическая передача содержит гидродинамический трансформатор, механические передачи и систему управления автоматическим переключением передач. При механической трансмиссии поток мощности от двигателя к колесам автомобиля идет через шестерни, т.е. через жесткую механическую связь. При гидромеханической же передаче этот поток мощности идет еще и через гидродинамический трансформатор, рабочие колеса которого связаны друг с другом через жидкость. Благодаря этому уменьшаются динамические нагрузки, вызываеые как крутильными колебаниями, идущими от двигателя, так и неравномерностью хода зубчатых передач. Смягчаются также динамические эффекты от неровностей дорожного покрытия.
Гидродинамический трансформатор благодаря особенностям своей характеристики изменяет (трансформирует) крутящий момент двигателя. Поэтому число передач в механической части гидромеханической передачи делается меньше числа передач в механических коробках передач — 5-6 передач вместо 13-16 в большегрузных автопоездах и на одну-две передачи меньше в легковых автомобилях.
Переключение передач в гидромеханических передачах осуществляется без разрыва потока мощности, обороты двигателя при этом изменяются плавно.
Перечисленные свойства гидромеханических передач придают автомобилям ряд ценных преимуществ.
Ниже кратко сообщается о 10 преимуществах автомобилей с гидромеханической передачей и обсуждаются 2 особенности: возможность увеличенных расходов топлива и большая стоимость гидромеханических передач по сравнению с механическими передачами. Эти особенности часто считаются недостатками гидромеханической передачи, но при внимательном рассмотрении таковыми не оказываются.
1. ЭКОЛОГИЯ
Когда автомобиль с механической передачей разгоняется для дальнейшего движения, то водитель последовательно использует все или почти все передачи коробки передач. Работа на каждой передаче сопровождается изменением частоты вращения вала двигателя от малой до максимальной при полной, как правило, подаче топлива. После достижения максимального значения частота вращения вала двигателя резко уменьшается для повторения такого же цикла на следующей передаче.
При таком режиме работы двигателя в атмосферу выбрасывается много токсичных веществ.
При использовании гидромеханической передачи экологические показатели улучшаются за счет сокращения числа переключений передач (меньшее количество передач) и за счет плавного изменения частоты вращения вала двигателя при этих переключениях. В литературе упоминались случаи, когда автомобили с механическими передачами не удавалось продать из-за несоответствия экологическим требованиям, и удавалось продать после достижения соответствия этим требованиям за счет установки на автомобили гидромеханических передач.
2. ОБЛЕГЧЕНИЕ УПРАВЛЕНИЯ АВТОМОБИЛЕМ
Для движения автомобиля с механической передачей постоянно используются 4 органа управления: педаль подачи топлива, педаль тормоза, педаль сцепления, рычаг переключения передач.
Для движения автомобиля с гидромеханической передачей постоянно используются 2 органа управления: педаль подачи топлива и педаль тормоза. Из-за автоматического переключения передач отпадает надобность в педали сцепления и в рычаге переключения передач.
3. БЕЗОПАСНОСТЬ ДВИЖЕНИЯ
Сокращение органов управления позволяет водителю при усложнении дорожной обстановки не отвлекаться на манипуляции органами управления, а уделить все внимание ситуации на дороге. Быстроте реакции водителя в сложной обстановке способствует и то, что при применении гидромеханической передачи органов оперативного управления всего два и для каждого можно использовать «свою ногу», которую не нужно куда-то переносить или на что-то переключать.
4. КОМФОРТАБЕЛЬНОСТЬ ДВИЖЕНИЯ
Переключения передач в гидромеханической передаче происходят без разрыва потока мощности. Благодаря этому пассажиры и водитель не испытывают толчков и рывков, которыми неизбежно сопровождается переключение передач в механической коробке передач и которые зависят от квалификации водителя. При автоматическом переключении передач такой зависимости нет, движение происходит как бы при бесступенчатой трансмиссии и становится более комфортабельным.
5. ДВИЖЕНИЕ С МАЛЫМИ СКОРОСТЯМИ
В ряде случаев важна способность автомобиля двигаться с малыми скоростями — например, при «пробках» на дорогах. Благодаря гидродинамическому гидротрансформатору отсутствует жесткая связь двигателя с колесами автомобиля. Это позволяет давать любые обороты валу двигателя даже при стоящем на передаче неподвижном автомобиле. Давая двигателю малые обороты, можно обеспечить движение автомобиля со сколь угодно малой скоростью, не опасаясь заглохания двигателя.
6. ПРОХОДОМОСТЬ АВТОМОБИЛЯ
Гидромеханическая передача позволяет гибко регулировать скорость автомобиля и величину подводимого к колесам автомобиля крутящего момента, работая только педалью подачи топлива.
Это существенно улучшает проходимость автомобиля. Значительно легче предотвращать проворот колес автомобиля на скользкой или обледенелой дороге, предотвращать срыв грунта при движении на сыпучих грунтах. Облегчается движение и в других тяжелых дорожных условиях.
7. КВАЛИФИКАЦИЯ ВОДИТЕЛЯ
Существенное упрощение управления автомобилем позволяет снизить требования к квалификации водителя. При освоении управления автомобилем с механической трансмиссией наибольшие трудности вызывает приобретение навыка в переключении передач, когда требуется сочетание выжима сцепления с переводом рукоятки переключения передач и последующее отпускание педали сцепления в сочетании с перемещением педали подачи топлива.
При гидромеханической передаче нужды в таком навыке нет, переключения передач происходят автоматически. Это существенно облегчает обучение управлению автомобилем и его эксплуатацию, снижает требования к квалификации водителя.
8. УТОМЛЯЕМОСТЬ ВОДИТЕЛЯ
Оценивать количественно такой сложный физиологический фактор, как утомляемость, чрезвычайно трудно, тем более, что одни и те же внешние воздействия на разных людей действуют по-разному. На физиологические оценки могут влиять и особенности конструкции автомобилей, не относящиеся к исследуемому фактору. Поэтому наиболее достоверными нам представляются оценки, которые делают водители по своим ощущениям и впечатлениям от работы на автомобилях с подлежащими оценке агрегатами.
Для примера можно взять автобус — условия работы водителя на нем наиболее тяжелые. Автобус останавливается на многочисленных остановках и перед светофорами, а затем снова разгоняется после каждой остановки. Для обеспечения такого режима движения водитель автобуса с механической трансмиссией в смену делает несколько тысяч переключений передач, выжимая сцепление при каждом переключении.
Для обеспечения такого режима движения водитель автобуса с механической трансмиссией в смену делает несколько тысяч переключений передач, выжимая сцепление при каждом переключении.
ЗИЛ незадолго до прекращения на нем производства автобусов построил небольшую партию автобусов с гидромеханическими передачами своей конструкции. Эти автобусы проходили эксплуатационные испытания в автобусных парках разных городов, перевозя пассажиров по рейсовым маршрутам. Пробеги этих автобусов исчислялись десятками тысяч километров.
Были случаи, когда в силу каких-то обстоятельств водителям приходилось работать две смены подряд. Водители отмечали, что за две смены работы подряд на автобусе с гидромеханической передачей они уставали так же, как за одну смену работы на автобусе с механической трансмиссией. Таков эффект влияния гидромеханической передачи на утомляемость водителей.
9. ДОЛГОВЕЧНОСТЬ АГРЕГАТОВ АВТОМОБИЛЯ
Гидромеханическая передача благотворно влияет на долговечность двигателя и других агрегатов автомобиля. На эту тему имеется много публикаций, но лучше всего опираться на собственные данные, полученные в нашей стране на наших дорогах.
Лаборатории гидропередач ЗИЛ удалось получить количественные оценки применительно к грузовым автомобилям ЗИЛ, проведя длительные испытания гидромеханических передач фирмы Аллисон (США) на седельных тягачах ЗИЛ-130 В1 и на ряде других грузовых автомобилях ЗИЛ.
Испытания были сравнительными. Они длились около 12 лет. Одновременно испытывались 2 тягача ЗИЛ-130 В1 — один с гидромеханической передачей, другой со стандартной механической трансмиссией. На автомобиле с гидромеханической передачей первый отказ по гидромеханической передаче наступил через 800 тыс. км, второй — через 870 тыс. км. Предельного состояния у гидромеханической передачи достичь не удалось. После небольшого ремонта она была пригодна для дальнейшей эксплуатации.
За время сравнительных испытаний с пробегом 870 тыс.км на автомобиле с гидромеханической передачей были проведены следующиие ремонтные работы:
· заменены 4 двигателя;
· проведено 8 текущих ремонтов двигателя.
На автомобиле с механической трансмиссией за это же время:
· заменены 2 шасси;
· заменены 4 двигателя;
· проведено 9 текущих ремонтов двигателя;
· заменены 13 ведомых дисков сцепления;
· заменены 4 коробки передач;
· проведено 4 текущих ремонтов коробок передач.
Видно, что применение гидромеханической передачи на одном конкретном автомобиле позволило сэкономить 4 коробки передач, 13 дисков сцепления и стоимость 4-х ремонтов коробки передач и одного ремонта двигателя.
Надо добавить, что испытания велись не поблизости от завода, что позволило бы опекать их и что-то подсказывать, а в Ульяновске, куда после первых месяцев наблюдения работники завода не показывались годами, и эксплуатация была самой рядовой (включая командировки на целину и т.д.).
Применение гидромеханической передачи увеличивает долговечность и других, кроме трансмиссии и двигателя, узлов автомобиля. Исследованиями ВКЭИавтобуспрома установлено, что применение гидромеханической передачи уменьшает уровень вибраций кузова автобуса, из-за чего увеличивается его долговечность.
10. СРЕДНЯЯ СКОРОСТЬ ДВИЖЕНИЯ
При переключении передач в механической трансмиссии на время переключения неизбежно прерывается поток мощности, подводимой к ведущим колесам автомобиля. Происходит некоторое снижение скорости автомобиля. Это снижение скорости тем больше, чем в более трудных дорожных условиях происходит переключение передач — когда ухудшается «накат» автомобиля. За счет потери скорости при переключениях передач уменьшается и средняя скорость движения автомобиля, во многом определяющая его производительность.
За счет потери скорости при переключениях передач уменьшается и средняя скорость движения автомобиля, во многом определяющая его производительность.
На автомобиле с гидромеханической передачей поток мощности за время автоматического переключения передач не прерывается. Потери скорости и, следовательно, средней скорости движения, при этом не происходит.
При проведении на ЗИЛе сравнительных испытаний автопоездов ЗИЛ-130 В было установлено, что при движении по равнинному свободному шоссе средние скорости обоих поездов были практически одинаковыми. При движении же в городе, на холмистом шоссе и на горных дорогах средние скорости движения автомобиля с гидромеханической передачей были на 3,5…11% выше (тем выше, чем сложнее дорожные условия).
11. ТОПЛИВНАЯ ЭКОНОМИЧНОСТЬ (первая особенность)
Существует мнение, что автомобили с гидромеханической передачей расходуют больше топлива, чем автомобили с механическими коробками передач. Иногда это так, а иногда и не так — в каждом случае надо разбираться конкретно, опираясь на имеющий опыт.
При многолетних испытаниях гидромеханических передач фирмы Аллисон, о которых сказано выше, расход топлива на автомобиле с гидромеханической передачей был таким же, как на автомобиле с механической коробкой передач.
При сравнительных испытаниях грузовых автомобилей ЗИЛ на Симферопольском шоссе автомобили с гидромеханическими передачами по отношению к автомобилям с механическими коробками передач имели экономию топлива около 3%, а при испытаниях этих же автомобилей на менее загруженном Каширском шоссе автомобили с гидромеханической передачей расходовали топлива на 2% больше. Это еще раз говорит о том, что по расходу топлива гидромеханические передачи более эффективны в трудных условиях движения.
Говоря о расходах топлива, надо иметь в виду, что стоимость топлива при эксплуатации автомобилей составляет 14-18% общих эксплуатационных расходов. Если допустить перерасход топлива на 3%, то при прочих равных условиях это увеличило бы общие эксплуатационные расходы на 0,42-0,54%. Такое увеличение многократно перекроется снижением расходов на ремонты и замены агрегатов трансмиссии и других агрегатов, не говоря уже о трудно учитываемом, но несомненно ощутимом эффекте от улучшения экологических показателей и от повышения безопасности движения.
Если допустить перерасход топлива на 3%, то при прочих равных условиях это увеличило бы общие эксплуатационные расходы на 0,42-0,54%. Такое увеличение многократно перекроется снижением расходов на ремонты и замены агрегатов трансмиссии и других агрегатов, не говоря уже о трудно учитываемом, но несомненно ощутимом эффекте от улучшения экологических показателей и от повышения безопасности движения.
Расход топлива на любом автомобиле зависит от квалификации водителя. Американские исследователи по заказу армии США провели специальные испытания по оценке влияния квалификации водителя на расход топлива при различных видах автомобильной трансмиссии. Заказчик хотел узнать, как скажется на расходах топлива то, что в армейских условиях за руль садятся солдаты с различной водительской квалификацией. За эталон брался расход топлива, получавшийся у водителя высокой квалификации. Оказалось, что на автомобиле с гидромеханической передачей расход топлива у водителя невысокой квалификации был почти таким же, как у водителя высокой квалификации, а при механической трансмиссии водитель невысокой квалификации расходовал топлива значительно больше. Это позволяет считать, что во многих случаях использования гидромеханической передачи скорее можно говорить о равенстве расходов топлива или даже о его экономии, а не о его перерасходе.
12. СТОИМОСТЬ (вторая особенность)
Стоимость гидромеханической передачи надо сравнивать со стоимостью комплекта, который она заменяет — коробки передач, сцепления, усилителя сцепления и системы управления переключением передач. И в этом случае, однако, гидромеханическая передача дороже механической. Само по себе это ни о чем не говорит. Лучшее качество стоит денег. Сравнивать надо конечные результаты.
В приведенном выше конкретном примере с автопоездом ЗИЛ-130 В1 превышение стоимости гидромеханической передачи над стоимостью механической трансмиссии надо сравнивать с суммарной стоимостью 4-х коробок передач, 13-ти дисков сцепления, 4-х ремонтов коробок передач и 1-го ремонта двигателя. Сюда надо добавить стоимость простоев, вызванных этими заменами и ремонтами. Очевидно, что все эти затраты и неудобства значительно превышают разницу в стоимости сравниваемых агрегатов.
Сюда надо добавить стоимость простоев, вызванных этими заменами и ремонтами. Очевидно, что все эти затраты и неудобства значительно превышают разницу в стоимости сравниваемых агрегатов.
Учитывая все вышеизложенное, можно утверждать, что применение гидромеханических передач обеспечивает целый ряд преимуществ автомобилям всех классов.
Наиболее разительно эти преимущества проявляются в легковых автомобилях, на которых гидромеханические передачи получили наибольшее распространение. Применительно к легковым автомобилям из перечисленных выше преимуществ стоит выделить легкость управления, благодаря чему:
· облегчилось и ускорилось обучение управлению автомобилем;
· управление автомобилем стало доступно людям, для которых оно раньше было затруднено, в том числе женщинам всех возрастов и людям с физическими недостатками;
· увеличилась комфортабельность езды:
· уменьшилась утомляемость от управления автомобилем и от поездок в нем.
Существенным преимуществом является также повышение надежности и долговечности агрегатов автомобиля.
Гидромеханическая трансмиссия автомобиля, назначение и устройство
На чтение 4 мин. Просмотров 633
Автомобили с гидромеханической трансмиссией приобрели широкую популярность. Транспортные средства с АККП имеют определенные особенности конструкции.
Назначение и устройство гидромеханической трансмиссии легкового автомобиля
Неотъемлемыми элементами конструкции классического устройства автомобиля служат сцепление с КПП. Но меняющийся образ жизни диктует создание оптимального комфорта для водителей. Это ведет к изменению стандартных узлов автомашины. Их все чаще заменяет комбинированная гидромеханическая трансмиссия, в состав которой входит как механическая, так и гидравлическая трансмиссии. В устройствах этого типа передаточное число, крутящий момент меняются постепенно и плавно.
Роль трансмиссии в машине
Для транспортного средства трансмиссией является все, что создает подачу крутящего момента от двигателя к колесам, например, КПП со сцеплением, как это в классических автомобилях. Сегодня в машинах их сменяют на АККП, когда управление облегчается, сцепление не предусмотрено, а переключения производятся автоматически.
Выполнение этих процессов обеспечивает гидромеханическая коробка передач. Для понимания процесса надо знать о двух главных моментах, возникающих при управлении автомобилем:
- При переключении скоростей трансмиссия отключается от двигателя;
- После смены дорожных условий выполняется изменение величины крутящего момента.
Это происходит после того, как выжато сцепление и переключена скорость коробкой передач (в обычных машинах). В транспортных средствах с АКПП эти процессы в большинстве случаев производит гидромеханическая коробка передач.
Механизм гидромеханической коробки
В устройство АКПП, применяемом в легковых автомобилях, входят:
- Гидротрансформатор;
- Управляющие составляющие;
- Механическая коробка скоростей.
Гидротрансформатор
ГидротрансформаторВ современный автомат входит гидротрансформатор, выполняющий в автомобиле с КПП (подает вращающий момент) функции сцепления. Благодаря гидротрансформатору транспортное средство плавно трогается. Снижение динамических нагрузок в трансмиссии приводит к повышению долговечности двигателя, а также остальных механизмов трансмиссии. Уменьшение количества переключений передач уменьшает утомляемость водителя.
Применение гидротрансформатора значительно увеличивает проходимость автомобиля по песку и снегу. Он создает устойчивую силу тяги с очень маленькой скоростью вращения на ведущих колесах, чем увеличивается их сцепление с поверхностью дорожного покрытия. Получается, что использование автоматических трансмиссий рекомендуется на внедорожниках. Гидротрансформатор имеет достаточно несложное устройство и объединяет три колеса:
- Двигатель с гидротрансформатором связывает насосное;
- Обеспечивает связь с первичным валом турбинное;
- Усиливает крутящий момент реакторное.

Турбины на 3/4 помещены в масло и защищены специальным корпусом. Рабочий процесс гидромеханического привода основывается на том, что вращающий момент направляется от двигателя к насосному колесу, к турбинному колесу подается поток масла. Оно раскручивает колесо, и усилие предается на вал коробки скоростей. Весь процесс циркуляции масла проходит по особой траектории: с внешней стороны насосного кольца направляется на турбинное, а далее назад через центр механизма идет к насосному.
ТурбинаГидротрансформатор автоматически меняет крутящий момент по мере нагрузки, далее он передается к механической коробке, и передачи переключаются фрикционными устройствами. Гидравлический привод определяет достаточное передаточное число, изменяя напор жидкости для ее циркулирования между напорным диском и турбинным. Свою работу гидротрансформатор выполняет непосредственно с планетарной коробкой.
Планетарная коробка
В гидромеханической АКПП чаще применяется планетарный механизм. При его простейшем устройстве крутящий момент подается к солнечной шестерне. С нею постоянно сцеплены свободно вращающиеся шестерни-сателлиты. На них предусмотрено водило, связанное с валом.
Если коронная шестерня находится в заторможенном положении, то крутящий момент через водило направляется на ведомый вал. Если шестерня расторможена, тогда сателлиты подают на нее крутящий момент. Ведомый вал при этом неподвижен.
Достоинства и недостатки автоматической коробки
Плюсы АКПП:
- Отсутствие переключения передач вручную;
- Осуществление равномерной подачи мощности.
Автомобили автоматическим переключением скоростей отличаются особой плавностью хода. Когда водителю нет необходимости переключаться вручную, то облегчается процесс вождения транспортного средства.
Недостатками считается более сложная конструкция трансмиссий и их большая масса. К недостаткам относится более низкий КПД, снижающий топливную экономичность автомашины.
Это простейший вариант гидромеханической трансмиссии, а сегодня на легковые автомобили устанавливаются более совершенные модели.
Гидромеханические коробки передач.
Гидромеханические коробки передач
Гидромеханическая передача является комбинированной, в которой наряду с гидротрансформатором применяется ступенчатая коробка передач. Обычно такую коробку передач сокращенно называют ГМП или ГМКП.
Гидротрансформатор, как и гидромуфта был изобретен немецким профессором Германом Феттингером в начале прошлого века. Прежде чем найти применение на автомобилях, эти гидродинамические передачи использовались в судостроении.
На автомобилях ГМП впервые появилась в США — в 1940 г. коробка Hydramatic была установлена на автомобилях Oldsmobile. В настоящее время в США гиромеханическими коробками передач оснащаются почти 90 % легковых автомобилей, а также все городские автобусы и значительная часть грузовых автомобилей.
В Европе массовое применение гидромеханических коробок передач началось только в начале семидесятых годов прошлого века, когда эти передачи нашли применение в автомобилях Mercedes-Benz, Opel, BMW.
Изменение режимов работы гидротрансформатора происходит автоматически. Если увеличивать нагрузку на выходе из гидротрансформатора, то происходит уменьшение угловой скорости турбины, что приводит к увеличению коэффициента трансформации.
К сожалению, гидротрансформатор имеет малый диапазон передаточных чисел, не обеспечивает движения задним ходом, не разобщает двигатель от трансмиссии (необходима сложная система опорожнения проточных частей от рабочей жидкости). Поэтому за гидро¬трансформатором устанавливают специальную коробку передач, которая компенсирует указанные недостатки. Такая гидромеханическая передача является бесступенчатой и позволяет получить любое передаточное число в заданном диапазоне.
В гидромеханических передачах в основном применяются механические планетарные коробки передач, которые легко поддаются автоматизации, но иногда используют и вальные ступенчатые коробки передач с автоматическим управлением.
Устройство и работа гидротрансформатора, а также его отличие от гидромуфты подробнее рассмотрено здесь.
В некоторых случаях гидротрансформатор устанавливается дополнительно к стандартному фрикционному сцеплению и ступенчатой коробке передач, при этом переключение передач происходит ручным способом.
В такой конструкции достаточно однодискового сцепления, так как оно служит только для отключения первичного вала коробки передач от турбинного колеса трансформатора при переключении передач, а плавность увеличения крутящего момента обеспечивает гидротрансформатор.
Достоинством такой передачи является относительная простота конструкции и управления по сравнению с автоматизированной передачей. Однако наиболее часто гидротрансформатор используется в сочетании двух- или трехступенчатой коробкой передач без стандартного фрикционного сцепления.
Коробки передач выполняются вальными или чаще планетарными. Управление переключением передач автоматическое или полуавтоматическое.
***
Двухступенчатая вальная коробка передач
Гидротрансформатор в сочетании с двухступенчатой вальной коробкой передач применяется в гидромеханической передаче автобуса ЛиАЗ-677М (рис. 1).
Она представляет собой редуктор с расположенными внутри него валами: первичным 3, вторичным 11 и промежуточным 15. Первичный вал связан с турбиной гидротрансформатора, а вторичный вал – с карданной передачей трансмиссии. Первая (понижающая) передача имеет передаточное число 1,79, а вторая передача – прямая, т. е. ее передаточное число равно единице.
Особенностью такой коробки передач является то, что для включения передач наряду с зубчатой муфтой используются многодисковые муфты (фрикционы), работающие в масле.
Ведущие диски фрикционов – стальные, а ведомые – металлокерамические. Они устанавливаются на внутренних или наружных шлицах и имеют возможность незначительного перемещения в осевом направлении. В разъединенном положении пакет дисков удерживают пружины, сжимание дисков происходит от воздействия масла, подаваемого в цилиндр включения фрикциона.
При включении первой передачи срабатывает фрикцион 5, который блокирует зубчатое колесо 4 с первичным валом 3. Муфта 8 при этом смещается влево и блокирует зубчатое колесо 7 с вторичным валом 11.
Крутящий момент передается через зубчатое колесо 4 первичного вала, зубчатые колеса 16 и 14 промежуточного вала и зубчатое колесо 7 на вторичный вал 11. При включении второй передачи срабатывает фрикцион 6, который блокирует первичный вал 3 с вторичным валом 11. Муфта 8 устанавливается в нейтральное положение.
Для движения задним ходом муфта 8 перемещается в правое положение и блокирует зубчатое колесо 10 с вторичным валом 11, затем включается фрикцион 5. Крутящий момент передается через зубчатые колеса 4, 16, 13, 12, 10 на вторичный вал 11 коробки передач.
При включении фрикциона 2 происходит блокировка гидротрансформатора, когда турбинное и насосное колеса жестко соединяются друг с другом, и он переходит в режим гидромуфты.
***
Трехступенчатая планетарная коробка передач
В гидромеханических передачах наибольшее применение нашли планетарные коробки передач. Они обладают компактностью, пониженным уровнем шума при работе и длительным сроком службы. Переключение передач в них происходит практически без разрыва потока мощности.
Основным звеном планетарной коробки передач является планетарный ряд (рис. 2), состоящий из эпициклического (коронного) зубчатого колеса 1, солнечного зубчатого колеса 2, водила 3 и сателлитов 4.
Оси сателлитов установлены на водиле и вращаются вместе с ним, т. е. они подвижны. В зависимости от того, какой элемент планетарного ряда является ведущим, а какой заторможен, происходит изменение передаточных чисел планетарного ряда.
Двухступенчатые коробки передач имеют один планетарный ряд. Многоступенчатые могут иметь два и более планетарных рядов, которые связаны друг с другом.
Торможение элементов планетарных рядов при переключении передач производится фрикционными муфтами (фрикционами) или ленточными тормозными механизмами.
Конструкция гидромеханической передачи легкового автомобиля, в которой гидротрансформатор сочетается с трехступенчатой планетарной коробкой передач представлена на рис. 3.
Гидротрансформатор 1 состоит из трех колес с лопастями. Вал 2 турбинного колеса является ведущим валом коробки передач. Ведомый вал 12 коробки передач расположен соосно с ведущим валом. Коробка передач включает два одинаковых планетарных ряда 7 и 8, три многодисковых фрикциона 5, 6, 9 и два ленточных тормозных механизма 4, 10.
Переключение передач осуществляется включением фрикционов и тормозных механизмов в различных комбинациях (рис. 4).
В нейтральном положении включен тормозной механизм 10 (рис. 3) и сблокирована муфта 13 свободного хода. Ведомый вал 12 не вращается.
На первой передаче включены фрикцион 6 и тормозной механизм 10, а также включена муфта 13 свободного хода. Эпициклическое зубчатое колесо планетарного ряда 8 вращается с угловой скоростью ведущего вала 2, а солнечное зубчатое колесо заторможено, водило вращает эпициклическое зубчатое колесо планетарного ряда 7, в котором солнечное зубчатое колесо также заторможено. Ведомым является водило этого ряда, выполненное заодно с ведомым валом 12. Муфта свободного хода 13 включена.
На второй передаче включены фрикцион 5 и тормозной механизм 10. Эпициклическое зубчатое колесо планетарного ряда 8 вращается свободно, а планетарного ряда 7 – с угловой скоростью ведущего вала 2.
Так как солнечное зубчатое колесо заторможено, то вращается водило и ведомый вал 12. Муфта свободного хода 13 включена.
На третьей передаче включены фрикционы 5 и 6, а также тормозной механизм 10. Эпициклическое зубчатое колесо и водило планетарного ряда 8 ведущие. С такой же угловой скоростью вращаются эпициклические зубчатые колеса и водило планетарного ряда 7, т. е. ведущий и ведомый валы вращаются с одинаковой частотой.
На передаче заднего хода включен фрикцион 6 и тормозной механизм 4. Водило планетарного ряда 8 заторможено, а эпициклическое зубчатое колесо ведущее.
Солнечное зубчатое колесо вращается в обратном направлении, в этом же направлении вращается солнечное зубчатое колесо планетарного ряда 7. Так как эпициклическое зубчатое колесо планетарного ряда 7 заторможено, ведомым является водило, связанное с ведомым валом 12.
Муфта свободного хода 13 заблокирована.
***
Управление гидромеханической коробкой передач
Главная страница
Дистанционное образование
Специальности
Учебные дисциплины
Олимпиады и тесты
Гидродинамические и гидромеханические трансмиссии.
Бесступенчатые трансмиссии
Гидродинамические и гидромеханические трансмиссии
В гидродинамической трансмиссии преобразование и передача мощности происходят за счет динамического (скоростного) напора жидкости. Устройством, которое позволяет осуществлять такое преобразование является гидротрансформатор.
Следует отличать гидротрансформатор от гидромуфты – гидротрансформатор способен не только передавать крутящий момент, но и изменять его величину, а гидромуфта лишь передает крутящий момент от ведущего (насосного) колеса ведомому (турбинному) колесу посредством потока жидкости.
Конструктивное отличие гидротрансформатора от гидромуфты заключается в наличии у гидротрансформатора реактора – неподвижного колеса с лопатками, способного изменять направление потока жидкости, передающего крутящий момент от насосного колеса к турбинному.
Гидротрансформатор (рис. 1) состоит из трех колес с радиально расположенными криволинейными лопастями: насосного колеса 4, которое через корпус 2 связано с коленчатым валом 1 двигателя, турбинного колеса 3, соединенного с выходным валом 7, и реактивного колеса 5, установленного на неподвижном пустотелом валу 6. Корпус гидротрансформатора заполнен маловязким маслом.
При вращении коленчатого вала масло, заполнившее промежутки между лопастями насосного колеса, под действием центробежных сил перетекает от внутренних краев лопастей к внешним, и совершая сложное движение, перемещается к турбинному колесу, воздействуя на его лопасти.
Ударяясь о лопасти турбинного колеса, масло отдает часть накопленной кинетической энергии, и поэтому турбинное колесо начинает вращаться в том же направлении, что и насосное.
От турбинного колеса масло поступает к лопастям реакторного колеса, изменяющим направление струй масла, а затем к внутренним краям лопастей насосного колеса.
Таким образом, часть масла циркулирует по замкнутому контуру: насосное колесо – турбинное колесо – реакторное колесо и опять – насосное колесо. При этом угловая скорость турбинного колеса оказывается меньше угловой скорости насосного колеса, поскольку имеет место «проскальзывание» ведущего колеса относительно ведомого, которое тем больше, чем выше нагрузка на выходном валу.
«Проскальзывание» колес гидротрансформатора обусловлено потерями кинетической энергии на трение между слоями масла и при перемещении масла по сложной траектории между колесами.
«Отставание» турбинного колеса от насосного приводит к тому, что поток жидкости начинает отклоняться от круговой траектории после удара о лопатки неподвижного реакторного колеса. При этом направление движения потока масла изменяется, и лопасти турбинного колеса принимают поток жидкости под более крутым углом, т. е. плечо вращающей силы возрастает, следовательно, возрастает и передаваемый гидротрансформатором крутящий момент.
Как только частота вращения насосного и турбинного колес выравниваются, поток жидкости начинает циркулировать по спиральной траектории, и крутящий момент, передаваемый от ведущего колеса к ведомому тоже выравнивается.
Затем опять появляется эффект «проскальзывания» колес и трансформатор начинает работать в режиме увеличения передаваемого крутящего момента.
Очевидно, что увеличение передаточного числа гидротрансформатора напрямую зависит от того, насколько ведомое (насосное) колесо отстает от ведущего (турбинного), т. е. от значения приложенной к выходному валу нагрузки. Таким образом, гидротрансформатор обладает свойством бесступенчатого и автоматического регулирования крутящего момента на выходном валу в зависимости от приложенной к нему нагрузки. При этом двигатель продолжает работать в заданном режиме, или незначительно от него отклоняясь.
Степень увеличения крутящего момента в гидротрансформаторе называется коэффициентом трансформации, а соотношение угловых скоростей валов насосного и турбинного колес называется передаточным отношением гидротрансформатора.
Между двигателем и трансмиссией в такой передаче нет жесткой связи, а лишь гидравлическая связь, поэтому гидротрансформатор сглаживает возникающие динамические нагрузки, благодаря чему значительно повышаются показатели надежности и долговечности деталей и узлов трансмиссии, двигателя и автомобиля в целом.
Однако у гидротрансформаторов относительно низкий максимальный КПД (0,85..0,9) и незначительный коэффициент трансформации (2…4). Поэтому в некоторых конструкциях с целью резкого повышения КПД предусматривается блокировка гидротрансформатора, при которой насосное и турбинное колесо жестко соединяются друг с другом во время работы.
Кроме того при отклонении нагрузки от номинальной значение КПД гидротрансформатора резко снижается.
Чтобы компенсировать эти недостатки и во время работы использовать зону наибольшего значения КПД, а также повысить передаваемый момент, гидротрансформатор комбинируют с элементами механической трансмиссии – сцеплением и ступенчатой коробкой передач или только с многоступенчатой коробкой.
Дальнейшая передача крутящего момента на ведущие колеса автомобиля осуществляется посредством карданной передачи и ведущими мостами. Такая комбинированная трансмиссия называется гидромеханической.
Автомобили с гидромеханической трансмиссией имеют значительно лучшую проходимость за счет плавного изменения силы тяги ан колесах при движении и, особенно, при трогании с места. Существенным преимуществом автомобилей с гидромеханической трансмиссией является возможность движения с очень малыми скоростями и даже полной остановки машины с работающим двигателем и включенной передачей.
Гидромеханическую трансмиссию применяют в машинах, работающих при значительных и частых изменениях нагрузки, например, городских автобусах. Но сложность конструкции, значительные масса и габариты, а также стоимость таких передач ограничивают применение гидромеханических трансмиссий в конструкциях автомобилей.
***
Вариаторные и гибридные трансмиссии
Главная страница
Дистанционное образование
Специальности
Учебные дисциплины
Олимпиады и тесты
Гидромеханические коробки передач — гидротрансформатор, планетарная коробка передач
Основным неудобством при использовании механических ступенчатых коробок передач является то, что водителю для переключения передач постоянно приходится нажимать на педаль сцепления и перемещать рычаг переключения передач.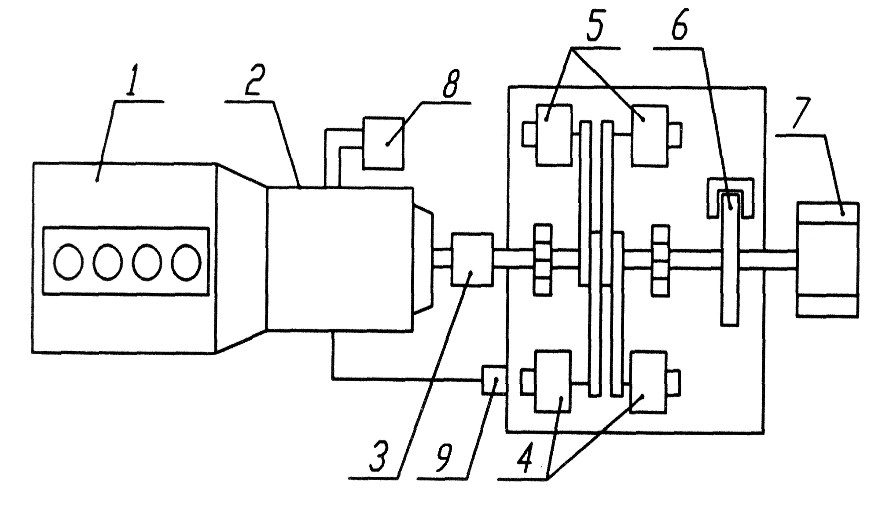 Это требует от него затрат значительных физических сил, особенно в условиях городского движения или при управлении автомобилем, работающим с частыми остановками. Для устранения таких неудобств и облегчения работы водителя на легковых, грузовых автомобилях и автобусах все более широкое применение получают гидромеханические коробки передач. Они выполняют одновременно функции сцепления и коробки передач с автоматическим или полуавтоматическим переключением передач. При гидромеханической коробке передач управление движением автомобиля осуществляется педалью подачи топлива и при необходимости тормозной педалью.
Это требует от него затрат значительных физических сил, особенно в условиях городского движения или при управлении автомобилем, работающим с частыми остановками. Для устранения таких неудобств и облегчения работы водителя на легковых, грузовых автомобилях и автобусах все более широкое применение получают гидромеханические коробки передач. Они выполняют одновременно функции сцепления и коробки передач с автоматическим или полуавтоматическим переключением передач. При гидромеханической коробке передач управление движением автомобиля осуществляется педалью подачи топлива и при необходимости тормозной педалью.
Гидромеханическая коробка передач состоит из гидротрансформатора и механической коробки передач. При этом механическая коробка передач может быть двух-, трех- или многовальной, а также планетарной.
Гидромеханические коробки с вальными механическими коробками передач применяются главным образом на грузовых автомобилях и автобусах. Для переключения передач в таких коробках используются многодисковые муфты (фрикционы), работающие в масле, а иногда – для включения низшей передачи и заднего хода – зубчатая муфта. Переключение передач фрикционами происходит без снижения скорости вращения коленчатого вала двигателя, т.е. бесступенчато – без разрыва передаваемых мощности и крутящего момента.
Гидромеханические коробки с планетарными механическими коробками передач получили наибольшее распространение и применяются на легковых, грузовых автомобилях и в автобусах.
Их преимущества: компактность конструкции, меньшие металлоемкость и шумность, больший срок службы.
К недостаткам относятся сложность конструкции, высокая стоимость, пониженный КПД.
Переключение передач в этих коробках производится при помощи фрикционных муфт и ленточных тормозных механизмов. При этом при включении одной передачи часть фрикционных муфт и ленточных тормозных механизмов пробуксовывает, что также снижает их КПД.
Гидротрансформатор
Гидротрансформатор (рисунок 1) представляет собой гидравлический механизм, который размещен между двигателем и механической коробкой передач. Он состоит из трех колес с лопатками – насосного (ведущего), турбинного (ведомого) и реактора. Насосное колесо 3 закреплено на маховике 1 двигателя и образует корпус гидротрансформатора, внутри которого размещены турбинное колесо 2, соединенное с первичным валом 5 коробки передач, и реактор 4, установленный на роликовой муфте 6 свободного хода. Внутренняя полость гидротрансформатора на 3/4 своего объема заполнена специальным маслом малой вязкости.
Рисунок 1 – Гидротрансформатор
а – общий вид; б – схема; 1 – маховик; 2 – турбинное колесо; 3 – насосное колесо; 4 – реактор; 5 – вал; 6 – муфта
При работающем двигателе насосное колесо вращается вместе с маховиком двигателя. Масло под действием центробежной силы поступает к наружной части насосного колеса, воздействует на лопатки турбинного колеса и приводит его во вращение. Из турбинного колеса масло поступает в реактор, который обеспечивает плавный и безударный вход жидкости в насосное колесо и существенное увеличение крутящего момента. Таким образом, масло циркулирует по замкнутому кругу, обеспечивая передачу крутящего момента в гидротрансформаторе.
Характерной особенностью гидротрансформатора является увеличение крутящего момента при его передаче от двигателя к первичному валу коробки передач. Наибольшее увеличение крутящего момента на турбинном колесе гидротрансформатора получается при трогании автомобиля с места. В этом случае реактор неподвижен, так как заторможен муфтой свободного хода. По мере разгона автомобиля увеличиваются скорости вращения насосного и турбинного колес. При этом муфта свободного хода расклинивается, и реактор начинает вращаться с увеличивающейся скоростью, оказывая все меньшее влияние на передаваемый крутящий момент. После достижения реактором максимальной скорости вращения гидротрансформатор перестает изменять крутящий момент и переходит на режим работы гидромуфты. Таким образом происходит плавный разгон автомобиля и бесступенчатое изменение крутящего момента.
После достижения реактором максимальной скорости вращения гидротрансформатор перестает изменять крутящий момент и переходит на режим работы гидромуфты. Таким образом происходит плавный разгон автомобиля и бесступенчатое изменение крутящего момента.
Гидротрансформатор автоматически устанавливает необходимое передаточное число между коленчатым валом двигателя и ведущими колесами автомобиля. Это обеспечивается следующим образом: с уменьшением скорости вращения ведущих колес автомобиля при увеличении сопротивления движению возрастает динамический напор жидкости от насоса на турбину, что приводит к росту крутящего момента на турбине и, следовательно, на ведущих колесах автомобиля.
Планетарная коробка передач
Планетарная коробка передач включает в себя планетарные механизмы. В простейшем планетарном механизме (рисунок 2) солнечная шестерня 6, закрепленная на ведущем валу 1, находится в зацеплении с шестернями-сателлитами 3, свободно установленными на своих осях. Оси сателлитов закреплены на водиле 4, жестко соединенном с ведомым валом 5, а сами сателлиты находятся в зацеплении с коронной шестерней 2, имеющей внутренние зубья.
Рисунок 2 – Планетарный механизм
1 – ведущий вал; 2 – коронная шестерня; 3 – сателлиты; 4 – водило; 5 – ведомый вал; 6 – солнечная шестерня; 7 – тормоз
Передача крутящего момента с ведущего вала 1 на ведомый вал 5 возможна только при заторможенной коронной шестерне 2 при помощи ленточного тормоза 7. В этом случае при вращении шестерни 6 сателлиты 3, перекатываясь по зубьям неподвижной шестерни 2, начнут вращаться вокруг своих осей и одновременно через водило 4 будут вращать ведомый вал 5. При растормаживании шестерни 2 сателлиты 3, свободно перекатываясь по шестерне 6, будут вращать шестерню 2, а вал 5 будет оставаться неподвижным.
На рисунке 3 приведена схема гидромеханической коробки передач, которая состоит из гидротрансформатора, трехвальной двухступенчатой механической коробки передач и системы управления. Наличие двухступенчатой механической коробки передач увеличивает диапазон регулирования крутящего момента.
Наличие двухступенчатой механической коробки передач увеличивает диапазон регулирования крутящего момента.
Рисунок 3 – Схема гидромеханической коробки передач
1, 6, 7, 9, 10, 11, 13 – шестерни; 2, 3, 17 – фрикционы; 4 – муфта; 5, 12, 19 – ведомый, промежуточный и ведущий валы; 8 – регулятор; 14, 15 – насосы; 16 – коленчатый вал; 18 – гидротрансформатор
Гидромеханическая коробка передач включает ведущий 19, ведомый 5 и промежуточный 12 валы с шестернями, многодисковые фрикционные сцепления 2, 3, 17 (фрикционы) и зубчатую муфту 4 с приводом. К системе управления относятся передний 15 и задний 14 гидронасосы и центробежный регулятор 8, который воздействует на фрикционы 2, 3, 17, обеспечивающие переключение передач.
В нейтральном положении все фрикционы выключены, и при работающем двигателе крутящий момент на вторичный вал 5 не передается. На I (понижающей) передаче системой управления автоматически включается фрикцион 2. При этом ведущая шестерня 1, свободно установленная на ведущем валу 19 коробки передач, блокируется валом, а зубчатая муфта 4 устанавливается вручную в положение переднего хода с помощью дистанционной системы управления. Крутящий момент на I передаче от гидротрансформатора передается через фрикцион 2, шестерни 1, 13, 11, 10 и зубчатую муфту 4 на ведомый вал 5 коробки передач.
При разгоне на I передаче, когда гидротрансформатор автоматически осуществляет заданный диапазон регулирования крутящего момента, скорость возрастает до оптимального значения для переключения на II передачу. В этом случае центробежный регулятор 8 дает сигнал на включение фрикциона 3 и отключение фрикциона 2.
Автоматическая система управления обеспечивает включение II (прямой) передачи, при этом крутящий момент от первичного вала 19 коробки передач передается через фрикцион 3 непосредственно на вторичный вал, и скорость автомобиля возрастает до значения, определяемого диапазоном регулирования гидротрансформатором.
Гидромеханическая коробка передач на автомобилях
На рисунке 4 представлена двухступенчатая гидромеханическая коробка передач легкового автомобиля. Она состоит из гидротрансформатора 1, механической планетарной коробки передач с многодисковым фрикционом 3 и двумя ленточными тормозными механизмами 2 и 4 и гидравлической системы управления с кнопочным переключением передач. Кнопки соответственно означают: нейтральное положение, задний ход, I передача и движение с автоматическим переключением передач. В двухступенчатой механической коробке передач имеются два одинаковых планетарных механизма 5 и 6.
Рисунок 4 – Гидромеханическая коробка передач легкового автомобиля
1 – гидротрансформатор; 2, 4 – тормозные механизмы; 3 – фрикцион; 5, 6 – планетарные механизмы
В нейтральном положении фрикцион 3, а также тормозные механизмы 2 и 4 выключены. Трогание автомобиля с места происходит при включенной I передаче. В этом случае масло под давлением поступает в цилиндр тормозного механизма 2, лента которого затягивается, и солнечная шестерня планетарного механизма 6 останавливается.
Если включена кнопка «Движение», то при разгоне автомобиля происходит автоматическое переключение на II передачу, что обеспечивается одновременным выключением тормозного механизма 2 и включением фрикциона 3. В этом случае планетарные механизмы 5 и 6 блокируются и вращаются как одно целое.
Для движение автомобиля задним ходом включается только тормозной механизм 4.
Другие статьи по коробкам передач
Что такое гидромеханическая коробка передач и как она работает
Сцепление и коробка переключения передач – это традиционные узлы любого отечественного или зарубежного автомобиля. Трансмиссия является элементом, обеспечивающим поступление крутящего момента от силового агрегата к колесам. Если раньше большинство транспортных средств оснащались механической коробкой, то сегодня все больше автолюбителей отдают предпочтение гидромеханической АКПП. Отчасти это связано с тем, что управление машиной упрощается, поскольку педаль сцепление отсутствует, а переключение скоростей происходит автоматическим образом.
Трансмиссия является элементом, обеспечивающим поступление крутящего момента от силового агрегата к колесам. Если раньше большинство транспортных средств оснащались механической коробкой, то сегодня все больше автолюбителей отдают предпочтение гидромеханической АКПП. Отчасти это связано с тем, что управление машиной упрощается, поскольку педаль сцепление отсутствует, а переключение скоростей происходит автоматическим образом.
Назначение комбинированной трансмиссии легкового авто
Образ жизни современных водителей существенно меняется и сегодня все больше требований предъявляются к созданию оптимальных комфортных условий во время вождения. Стандартные узлы автомобилей терпят существенные изменения, среди ярких примеров можно выделить комбинирование механической и гидравлической КП. Если говорить о гидромеханической трансмиссии и что это такое, первым делом стоит понять, в чем ее предназначение. Главное отличие заключается в плавном изменении вращающего движения. Облегченное управление позволило отказаться от использования сцепления, поскольку комбинированная КП отвечает за все процессы. При АКПП можно говорить о следующих ситуациях, касающихся управления авто:
- Во время переключения скоростей трансмиссия отключается от силового агрегата.
- Если дорожные условия меняются, величина вращающего момента также будет менять свое значение.
Использование АКПП на авто позволяет получить несколько неоспоримых преимущества. Помимо автоматизации переключения скоростей стоит отметить также повышение эксплуатационных характеристик силового агрегата и коробки и улучшение проходимости транспортного средства в условиях бездорожья.
Гидравлическая коробка автоматРазновидности гидромеханики
Коробки автомат долгое время устанавливались исключительно на автомобили среднего класса и категории премиум. На сегодняшний день агрегат получил массовое использование и пользуется у автолюбителей все большей популярностью. АКПП способны значительно повысить комфорт во время вождения, но стоит учесть, что такие узлы отличаются по разновидностям, каждая из которых имеет свои преимущества и недостатки. Разобравшись в принципе работы гидромеханических коробках передачи, можно будет определиться с выбором, какой тип АКПП подходит конкретному водителю. Стоит упомянуть о следующих типах гидромеханических КП:
Разобравшись в принципе работы гидромеханических коробках передачи, можно будет определиться с выбором, какой тип АКПП подходит конкретному водителю. Стоит упомянуть о следующих типах гидромеханических КП:
- Гидромеханический автомат. Это одна из первых трансмиссий подобного рода, которая появилась как альтернатива «механике». Конструкция представляет собой комбинацию гидротрансформатора и планетарной КП. Наличие электронных компонентов позволяют значительно повысить функциональные особенности агрегата.
- Вариаторная трансмиссия. Пользуется меньшей популярностью из-за того, что отсутствуют привычные фиксированные ступени. К преимуществам можно отнести максимальную плавность хода, а объясняется это как раз отсутствием смены передачей. Конструкция бесступенчатой трансмиссии выглядит следующим образом: для передачи крутящего используется привычный гидравлический преобразователь, а изменение крутящего момента происходит за счет изменения диаметра ведущего и ведомого шкива. Данные компоненты соединяются при помощи ремня и цепи, а изменение диаметра будет зависеть от скорости и нагрузки.
- Роботизированная коробка. Массово начала использоваться около 20 лет назад. От механики отличий немного, имеется сцепление, но разница заключается в том, управление работой сцепления происходит в автоматическом режиме. К преимуществам «робота» можно отнести невысокую стоимость, динамичный разгон и экономию топлива. Что касается недостатков, главным является снижение уровня комфорта.
- Преселективные коробки с двойным сцеплением. К таким относятся устройства DSG или Powershift. Агрегат можно отнести к роботизированным КП, но с более высокими техническими характеристиками. По конструкции напоминает привычную механику, но в этот раз инженеры использовали сразу два агрегата, помещенные в одну коробку.
Роботизированные агрегаты и АКПП – это устройства, цель которых заключается в упрощении взаимодействия водителя с трансмиссией.
Функции гидротрансформатора
Гидравлический трансформатор, по сути, являет собой усовершенствованную гидромуфту. Обычная муфта выполняет задачу простого вращения, то в случае АКПП добавляется увеличение крутящего положения. Агрегат выполняет несколько основных функций, одной из которых является демпфирующее действие во время вращательного движения. При постоянной разнице скорости вращения возникают потери, поэтому происходит блокировка, в результате которой вращающий момент начинает передаваться через демпфирующие пружины. Блокировочная муфта выполняет еще одну полезную функцию, предотвращение повышения расхода топлива. Говоря о функциях гидромеханической трансмиссии автомобиля, стоит отметить и некоторые негативные факторы.
Важно! При блокировке нередко наблюдается повышенное давление на важные компоненты мотора и трансмиссии. Фрикционные компоненты могут изнашиваться быстрей, а в масло могут попадать частицы, образовавшиеся в результате трения. В результате ходовые характеристики могут ухудшиться, а смена передачи перестанет быть плавной. Автовладельцам необходимо беречь коробку во время разгона или торможения.
Устройство гидротрансформатора
О том, что представляет устройство гидромеханической передачи, можно понять, изучив ее конструкцию. Главным узлами являются гидротрансформатор, механическая КП и механизмы управления. Гидротрансформатор – это главный компонент, а выполняет он практически ту же функцию, что и сцепление. Изучив конструкцию данной детали, можно заметить, что она состоит из трех колес, имеющих специальную форму. Первое колесо – насосное, его назначение выполнять связь между гидравлическим узлом и силовым агрегатом. Второе кольцо – турбинное, оно образует связь с первичным валом коробки. Третье колесо – реакторное, его функция состоит в усилении крутящего момента. Все три компонента закрыты посредством специального корпуса, внутренний объем которого на три четверти заполнен смазочным материалом.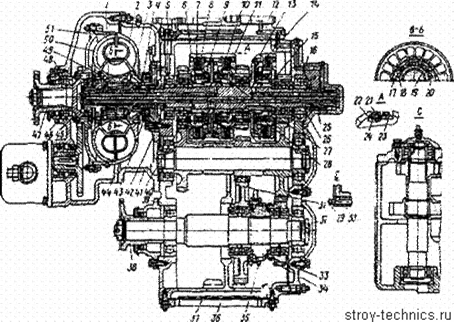 От двигателя крутящий момент поступает на насосную часть, затем посредством вращательных движений направляет на турбинное колесо смазочный материал, в результате чего усилие передается на первичный вал. По мере нагрузки гидротрансформатор в автоматическом режиме будет менять момент силы, который в свою очередь, передаваясь к механическим узлам, будет переключаться посредством фрикционных компонентов. Напор жидкости, проходящий от напорного диска к турбине, регулируется также в автоматическом режиме.
От двигателя крутящий момент поступает на насосную часть, затем посредством вращательных движений направляет на турбинное колесо смазочный материал, в результате чего усилие передается на первичный вал. По мере нагрузки гидротрансформатор в автоматическом режиме будет менять момент силы, который в свою очередь, передаваясь к механическим узлам, будет переключаться посредством фрикционных компонентов. Напор жидкости, проходящий от напорного диска к турбине, регулируется также в автоматическом режиме.
Планетарная коробка передач
В автомате обычно используется планетарная коробка. Несмотря на ее простое устройство, крутящий момент регулируется нужным образом и направляется к солнечной шестерне. С планетарным механизмом сцеплены шестерни-сателлиты свободного вращения, на которых предусмотрено специальное водило для связи с валом. Крутящий момент будет передаваться через водило в случае нахождения шестерни в заторможенном режиме, а если шестерня будет расторможено, то сателлиты начнут отправлять крутящий момент на нее. О том, как работает гидромеханическая коробка передач можно понять, изучив ее конструкцию. Планетарная КП является одной из разновидностей комбинированной системы. Название узла связано с тем, что сателлиты вращаются вокруг центральной шестерни подобно планетам солнечной системы. Применение данных компонентов в автомате обусловлено простотой модификации передаточного отношения. Для этого достаточно притормозить одну из деталей узла или соединить несколько элементов посредством фрикционной муфты.
Электронная часть гидромеханической АКПП
Современные автоматические коробки оснащаются электронным управлением, что позволяет выдерживать заданные моменты с более высокой точностью. Если в более старых устройствах речь шла о значении в 6-8%, то КП с электронным управлением выдерживают точность в 1%. Появились новые возможности, исходя из скорости и нагрузки на мотор, компьютер может определить массу транспортного средства и ввести необходимые поправки. Главными компонентами электронной системы управления являются рычаг управления и электронный блок. В данную систему также входят и определенные подсистемы, такие как:
Главными компонентами электронной системы управления являются рычаг управления и электронный блок. В данную систему также входят и определенные подсистемы, такие как:
- Подсистема ручного управления.
- Система, вырабатывающая управляемые сигналы.
- Элементы функционирования.
- Автоматическая защита.
- Измерительные узлы.
- Исполнительная система.
Плюсы и минусы гидромеханики
Автомобили, оснащенные АКПП, обеспечивают более безопасное и комфортное вождение, поскольку предоставляют возможность сконцентрироваться на дороге, не отвлекаясь на лишние действия. Особое преимущество получают начинающие водители, которым трудно использовать механику.
Важно! Если в автошколе ученик проходит обучение на авто с АКПП, он не сможет управлять транспортным средством с механической КП, так как в водительском удостоверении будет соответствующая пометка.
К преимуществам автоматизированной коробки можно отнести следующее:
- Передачи не нужно переключать вручную;
- Выполняется равномерная подача мощности. Авто, оснащенные АКПП, отличаются плавным ходом во время переключения скоростей.
- В случае с механической КП могут возникнуть трудности с троганием, при резком опускании сцепления двигатель может заглохнуть. В транспортных средствах с «автоматом» данный процесс контролируется электронными компонентами.
У коробки-автомат имеются и свои недостатки, главный из которых – это дороговизна обслуживания. Стоит отметить и высокие требования к условиям эксплуатации. Еще одним минусом является отсутствие возможности завести авто с «толкача», при севшем аккумуляторе.
Гидромеханика – это выбор тех автовладельцев, которые не стеснены в финансовых средствах и не готовы пожертвовать своим комфортом. При грамотном управлении и уходе машина с «автоматом» более надежна и безопасна в управлении.
устройство, принцип работы, особенности, преимущества и недостатки
АКПП (АКП) — автоматическая коробка переключения передач (автоматическая коробка передач, коробка «автомат») является одним из типов агрегатов, которые используются в устройстве трансмиссии автомобилей и другой техники с ДВС.
Главной задачей автоматической коробки, в отличие от МКПП, является возможность выбора и переключения передач без участия водителя транспортного средства. При этом выбор передачи (передаточного числа) осуществляется в зависимости от целого ряда условий и факторов.
При этом сегодня автоматической трансмиссией в обиходе принято называть любой тип коробок, которые работают по описанному выше принципу (когда переключение передач осуществляется автоматически). Сразу отметим, что называть «автоматом» все без исключения автоматические коробки является ошибкой.
Дело в том, что хотя изначально под АКПП следовало понимать исключительно классический гидромеханический «автомат», сегодня автоматической коробкой также называют роботизированные механические коробки передач (РКПП, коробка-робот), а также вариаторную коробку передач (вариатор, CVT).[/do]
Важно понимать, что данные типы коробок (робот и вариатор) сильно отличаются от гидромеханической трансмиссии как по устройству и принципам работы, так и по ресурсу, надежности, техническим характеристикам и т.д.
Содержание статьи
Автоматическая гидромеханическая коробка передач АКПП: особенности и отличия
Как уже было сказано выше, АКПП отличается от «коробки-робот» и вариаторных коробок CVT. В первом случае роботизированная КПП фактически является механической коробкой передач, в которой реализована возможность автоматизированного переключения передач при помощи электронных и механических устройств.
Коробка вариатор и вовсе не является коробкой передач в буквальном смысле, так как вариаторные КПП изменяют передаточное число плавно (бесступенчато). Другими словами, ступени (передачи) в устройстве такой коробки отсутствуют, а сам вариатор относится к отдельной разновидности бесступенчатых трансмиссий.
Если же говорить о классической гидромеханической коробке «автомат» (гидромеханическая передача), данный тип трансмиссии предполагает саму автоматическую коробку с планетарными передачами, а также гидротрансформатор (ГДТ).
При этом гидротрансформатор является обязательным элементом, так как гидромеханическая коробка без данного устройства работать не способна. Отметим, что сам ГДТ не участвует в процессе переключения передач, так как играет роль сцепления, передавая крутящий момент от двигателя на входной вал коробки – автомат.
Также гидротрансформатор гасит вибрации и сглаживает толчки при переходе с одной ступени на другую. Однако с учетом таких особенностей (сочетание механики и гидравлики) под автоматической коробкой передач часто понимают оба данных элемента трансмиссии, то есть саму коробку АКПП и гидротрансформатор.
Преимущества и недостатки АКПП
- Прежде всего, при учете соблюдения всех правил эксплуатации и своевременного обслуживания, ресурс данного типа коробок больше, в среднем, на 30-50%, чем у аналогов.
- Еще гидромеханическая АКПП хорошо сочетается с мощными двигателями, то есть коробка способна выдерживать большой крутящий момент.
- Также следует отметить ремонтопригодность самих коробок «автомат» и гидротрансформаторов, хотя качественный ремонт АКПП все равно остается достаточно дорогим.
Если говорить о минусах, гидромеханическая АКПП отличается тем, что автомобиль с такой коробкой расходует больше топлива по причине несколько сниженного КПД подобных трансмиссий. Также перед поездкой (даже в теплое время года) рекомендуется прогрев коробок данного типа, которые очень чувствительны к давлению трансмиссионной жидкости.
На владельцев автомобилей с АКПП с целью продления срока службы агрегата накладываются определенные ограничения. Например, запрет на буксировку автомобиля без вывешивания передних колес со скоростью выше 30-40 км/ч на расстояние больше 50-60 км и ряд других.
Также следует выделить повышенные требования к качеству и свойствам рабочей трансмиссионной жидкости ATF, а также необходимость ее периодической замены (каждые 40-60 тыс. км. пробега).
Отдельно специалисты выделяют проблемы с гидроблоком и клапанами (соленоидами). Узкие каналы гидроплиты в процессе эксплуатации забиваются продуктами износа коробки и различными отложениями, клапана также выходят из строя. В результате это приводит к некорректной работе коробки.
Узкие каналы гидроплиты в процессе эксплуатации забиваются продуктами износа коробки и различными отложениями, клапана также выходят из строя. В результате это приводит к некорректной работе коробки.
Еще на «классических» АКПП, особенно в случае с бюджетными авто, слабым местом является гидротрансформатор, который теряет герметичность и начинает давать течь на относительно небольших пробегах. В таком случае требуется ремонт гидротрансформатора или его замена.
Читайте также
Введение в гидромеханические трансмиссии
Стоимость топлива и топливосберегающие характеристики бесступенчатых трансмиссий (CVT) увеличили давление, чтобы обеспечить возможность CVT все более и более крупной внедорожной техники. Архитектура гидромеханической трансмиссии позволяет меньшим гидравлическим компонентам обеспечивать экономичную работу вариатора для более крупных машин. В результате количество гидромеханических трансмиссий на рынке растет.
Схема гидромеханической трансмиссии концептуально проста с двумя параллельными трактами мощности ( Рис. 1 ). Гидравлический тракт состоит из насоса и двигателя, называемого здесь «вариатором». Механический путь обычно представляет собой вал с одной или двумя шестернями. Эти пути связаны с обычными компонентами механической трансмиссии, такими как шестерни, валы, муфты и, по крайней мере, одна планетарная передача. Возможностей подключения очень много.В данном проекте именно детали этих взаимосвязей составляют основную часть интеллектуальной собственности и пригодности для целевого машинного приложения.
Гидромеханические трансмиссии используются в сельскохозяйственных тракторах давно. Они либо стандартны, либо предлагаются в качестве опции ( Рис. 2 ).
2 ).
Гидромеханические трансмиссии до сих пор обычно не использовались в землеройном оборудовании. Считается, что сегмент колесных погрузчиков получит наибольшую выгоду от вариатора, и именно здесь можно найти последние предложения.Примеры в Fig. 3 были анонсированы и доступны сейчас или будут в ближайшее время.
Данные конструкции различаются по трем причинам:
- Первый — это конструкция вариатора и его расположение, например, насос переменного рабочего объема с наклонной шайбой, двигатель постоянного рабочего объема с наклонной осью, установленный внутри.
- Второй — тип муфты. Общие термины — это входное соединение, выходное соединение и составное разделение.Хотя подробности этой номенклатуры выходят далеко за рамки данной статьи, в ней обычно описывается, подключен ли входной или выходной вал трансмиссии напрямую через передаточное число к одному из валов вариатора. В случае составного разъема ни один из валов вариатора не подсоединяется напрямую.
- Третий — количество диапазонов или режимов. Это количество различных механических взаимосвязей между механическими и гидравлическими путями за счет включения и выключения любых муфт в системах передач.Обратите внимание, что тип связи не обязательно одинаков для каждого диапазона или режима.
Рассмотрим топливную карту двигателя, показанную на рис. 4 . По вертикальной оси отложена мощность двигателя, по горизонтальной оси — частота вращения двигателя. Пик каждого контура указывает максимальную мощность двигателя для данного расхода топлива. Геометрическое место этих пиков определяет наилучшую скорость двигателя при минимальном расходе топлива.
Рассмотрим трансмиссию, описанную в Рис.5 . График в нижней части рисунка показывает, что для любой данной путевой скорости возможны только одна или две скорости вращения двигателя. Маловероятно, что одна из этих скоростей попадает в линию минимального расхода топлива Рис. 4 . Кроме того, ожидаемые изменения нагрузки, особенно если возникают какие-либо трудности с изменением передаточного числа, могут побудить оператора выбрать более высокую частоту вращения двигателя (более высокий расход топлива) и / или более низкую путевую скорость (более медленное время цикла).
Маловероятно, что одна из этих скоростей попадает в линию минимального расхода топлива Рис. 4 . Кроме того, ожидаемые изменения нагрузки, особенно если возникают какие-либо трудности с изменением передаточного числа, могут побудить оператора выбрать более высокую частоту вращения двигателя (более высокий расход топлива) и / или более низкую путевую скорость (более медленное время цикла).
Рассмотрим трансмиссию на рис.6 . График в нижней части рисунка показывает, что для данной путевой скорости возможна почти любая частота вращения двигателя и, следовательно, она может соответствовать частоте вращения двигателя с минимальным расходом топлива, показанной на рис. 4 . Линии оборотов двигателя из графика рис. 5 включены для справки. Поскольку современные гидромеханические вариаторы так хорошо меняют передаточное число, проблем с изменениями нагрузки, как, например, может быть с дискретными ступенчатыми трансмиссиями, мало, если они вообще возникают.
Хотя информация в этой статье может не подготовить вас к проектированию гидромеханической трансмиссии, она позволит вам легче распознать их и их потенциальные преимущества.
ОБ АВТОРЕ: Майк Кронин всю свою карьеру проработал в Caterpillar, работая над внедорожными трансмиссиями, в первую очередь проектированием и разработкой нескольких гидромеханических трансмиссий и систем рулевого управления для гусеничных машин. Он вышел на пенсию в 2010 году, но продолжает работать в компании Caterpillar на неполной ставке. В настоящее время он имеет 23 патента в области трансмиссии.Tagged затраты, конструкция, фундамент, гидромеханика, трансмиссия
Комплексное управление гидромеханической регулируемой трансмиссией
Гидромеханическая регулируемая трансмиссия (HMT) имеет преимущества непрерывного изменения и высокой эффективности.Так что это одна из идеальных трансмиссий для тяжелых автомобилей.![]() Процесс непрерывного изменения скорости включает в себя регулирование скорости в диапазоне и сдвиг диапазона. В данной статье предлагается интегрированная стратегия управления HMT. Получен алгоритм стратегии управления скоростью асимметричной насыщенной инкрементальной пропорциональной интегральной производной (ПИД) в условиях диапазона и сдвига диапазона. В этой статье представлена логика переключения диапазонов и стратегии управления переключением диапазонов. Модель контроллера создается в Matlab Simulink и симулируется с моделью транспортного средства, оснащенного двухдиапазонным HMT.Создан прототип HMT-платформы аппаратного моделирования (HILS) для интегрированной стратегии управления. Результаты HILS показывают, что процесс переключения диапазона плавный и колебаний скорости не происходит. На стадии стабилизации дроссельной заслонки частота вращения двигателя регулируется до близкой к оптимальной, а правила ее изменения соответствуют результатам моделирования. Стратегия интегрированного контроля разумна.
Процесс непрерывного изменения скорости включает в себя регулирование скорости в диапазоне и сдвиг диапазона. В данной статье предлагается интегрированная стратегия управления HMT. Получен алгоритм стратегии управления скоростью асимметричной насыщенной инкрементальной пропорциональной интегральной производной (ПИД) в условиях диапазона и сдвига диапазона. В этой статье представлена логика переключения диапазонов и стратегии управления переключением диапазонов. Модель контроллера создается в Matlab Simulink и симулируется с моделью транспортного средства, оснащенного двухдиапазонным HMT.Создан прототип HMT-платформы аппаратного моделирования (HILS) для интегрированной стратегии управления. Результаты HILS показывают, что процесс переключения диапазона плавный и колебаний скорости не происходит. На стадии стабилизации дроссельной заслонки частота вращения двигателя регулируется до близкой к оптимальной, а правила ее изменения соответствуют результатам моделирования. Стратегия интегрированного контроля разумна.
1. Введение
С развитием автомобильной промышленности заказчики повышают требования к комфорту и топливной экономичности.Передачи важны для удовлетворения требований [1, 2].
Основные характеристики и характеристики передаточного числа HMT показаны на рисунке 1. Входная мощность делится на две части: гидравлическую мощность и механическую мощность в блоке разделения мощности. Гидравлическая трансмиссия включает в себя гидравлический насос переменного рабочего объема и двигатель постоянного рабочего объема. Изменяя рабочий объем насоса, скорость двигателя постоянно изменяется от минимальной (отрицательной) до максимальной (положительной), что определяется как ход.Каждый ход соответствует рабочему режиму механической трансмиссии, который определяется как диапазон. Наконец, два потока мощности сходятся в непрерывно регулируемый поток мощности в блоке слияния.
(a) Основы HMT
(b) Характеристики передаточного числа
(a) Основы HMT
(b) Характеристики передаточного числа
HMT — новая бесступенчатая трансмиссия.![]() Это заставляет двигатель работать в высокоэффективной области, поэтому он имеет преимущество высокой эффективности.И он мог передавать большую нагрузку, чем бесступенчатая трансмиссия ременного типа (CVT). Следовательно, HMT — одна из идеальных трансмиссий для тяжелых грузовиков [3]. И его успешно применяли на большегрузных автомобилях [4–6].
Это заставляет двигатель работать в высокоэффективной области, поэтому он имеет преимущество высокой эффективности.И он мог передавать большую нагрузку, чем бесступенчатая трансмиссия ременного типа (CVT). Следовательно, HMT — одна из идеальных трансмиссий для тяжелых грузовиков [3]. И его успешно применяли на большегрузных автомобилях [4–6].
На основе большого количества исследований по проектированию и моделированию HMT был разработан ряд методов проектирования и анализа. Линарес и др. [5] объяснил основы всех типов трансмиссии CVT и описал конструктивные параметры и основы системы разделения мощности.Макор и Россетти [7] оптимизировали конструкцию HMT и получили хорошую сходимость по скорости и высокий средний КПД. Чтобы разработать систему управления HMT, Чжан и Чжо [8] построили модель HMT, используя принцип динамики. Choi et al. [9] провели тренажер трактора с ГМТ в режимах работы и движения. И скорость трактора, и частота вращения двигателя могли поддерживаться на желаемых значениях. По сравнению с технологиями проектирования и анализа HMT, контроль HMT все еще находится на ранней стадии разработки.
Процесс изменения скорости состоит из регулирования скорости по диапазону и смещения диапазона. Следовательно, необходимо регулировать скорость в диапазоне, время переключения диапазона и методы переключения. Множество исследований было посвящено регулированию скорости в диапазоне и компонентах управления. Юань и др. [10] и Wei et al. [11] разработал ПИД-регулятор с переменным параметром и изучил систему управления скоростью на HMT. В их исследованиях может быть реализовано отслеживание соотношения скоростей цели. Но их исследования были сосредоточены только на регулировании передаточного числа по дальности.Hu et al. [12] исследовали возможность переключения без отключения электроэнергии. Чжан и Чжо [13] представили метод изменения скорости и сдвига диапазона для достижения самого широкого диапазона скоростей и избежания повторяющегося переключения. Savaresi et al. [14] разработали систему управления, включающую сервоконтроллер на клапане, сервоконтроллер на гидравлическом передаточном числе и синхронизатор. Но улучшение характеристик трактора было достигнуто только за счет замены нынешних насосов / двигателей и датчиков скорости. Tanelli et al. [15] разработали систему управления для трактора, оснащенного HMT, включающую управление переключением одного и двух диапазонов сцепления, а также улучшенное качество переключения.В статье представлен комплексный метод управления HMT. Модель контроллера создается в Matlab Simulink и симулируется с моделью транспортного средства, оснащенного HMT. Проведен тест HILS HMT.
Savaresi et al. [14] разработали систему управления, включающую сервоконтроллер на клапане, сервоконтроллер на гидравлическом передаточном числе и синхронизатор. Но улучшение характеристик трактора было достигнуто только за счет замены нынешних насосов / двигателей и датчиков скорости. Tanelli et al. [15] разработали систему управления для трактора, оснащенного HMT, включающую управление переключением одного и двух диапазонов сцепления, а также улучшенное качество переключения.В статье представлен комплексный метод управления HMT. Модель контроллера создается в Matlab Simulink и симулируется с моделью транспортного средства, оснащенного HMT. Проведен тест HILS HMT.
2. Стратегия интегрированного управления HMT
Двухдиапазонный HMT показан на рисунке 2 и проиллюстрирован для иллюстрации метода управления. Двухдиапазонный HMT включает в себя три планетарных редуктора (, и), два тормоза (), один насос переменного рабочего объема () и один двигатель постоянного рабочего объема ().На рисунке 2 это входная скорость HMT и выходная скорость HMT. Когда тормоз включен, а тормоз отпущен, планетарный ряд работает, а HMT работает в гидравлическом диапазоне (). Когда тормоз включен и тормоз отпущен, планетарный редуктор включается и работает, а HMT работает в гидромеханическом диапазоне (HM).
Скоростные характеристики HMT состоят из нескольких связанных бесступенчато регулируемых диапазонов. Следовательно, интегрированная стратегия управления должна включать управление скоростью в диапазоне, логику переключения диапазона, условия переключения диапазона и стратегии управления переключением.
Скорость HMT регулируется в зависимости от скорости автомобиля и открытия дроссельной заслонки. HMT заставляет двигатель и транспортное средство работать различными способами в соответствии с выбранным режимом для достижения ожидаемых характеристик.
3. Стратегия управления скоростью в диапазоне
Стратегия управления скоростью в диапазоне изменяет управляющий ток гидравлического насоса в соответствии с разницей между частотой вращения двигателя и идеальной скоростью. Стратегия регулирования скорости в диапазоне изучалась в течение многих лет, в основном в области ПИД-регулирования, управления отслеживанием передаточного числа и т.д. [10–13].
Стратегия регулирования скорости в диапазоне изучалась в течение многих лет, в основном в области ПИД-регулирования, управления отслеживанием передаточного числа и т.д. [10–13].
В определенных дорожных условиях ускорение автомобиля с HMT ограничено крутящим моментом двигателя и максимальным крутящим моментом двигателя. Максимальный крутящий момент двигателя определяется максимальным давлением при условии, что двигатель выбран.
Когда ошибка между фактической частотой вращения двигателя и целевой скоростью больше во время ускорения транспортного средства, градиент диапазона управляющего тока насоса переменного рабочего объема увеличивается в соответствии с алгоритмом PID. И градиент скорости вращения двигателя и сопротивление ускорению транспортного средства увеличиваются, из-за чего гидравлический блок теряет способность ускорять транспортное средство после того, как давление поднимается до максимального давления.Следовательно, когда автомобиль ускоряется, необходимо установить верхний предел насыщения. Когда транспортное средство быстро замедляется, передаточное число HMT должно быстро уменьшаться. Таким образом, нижний предел насыщения при замедлении транспортного средства должен быть больше, чем при ускорении транспортного средства. То есть пределы насыщения асимметричны. В этой статье предлагается стратегия инкрементального ПИД-регулирования скорости асимметричного насыщения HMT в диапазоне, и выводятся общие алгоритмы в каждом диапазоне.
3.1. Универсальный алгоритм инкрементного ПИД-регулятора
Контроллер HMT относится к цифровому блоку управления ПИД-регулятором, и его приращение где-то означает приращение при и означает ошибку при; ,, и — коэффициенты соответственно, где,,; относится к коэффициенту масштабирования и относится к интегральному коэффициенту; относится к производному коэффициенту,; означает производную постоянную времени, означает интегральную постоянную времени и означает период выборки.
Результатом является сумма).![]()
3.2. Стратегия инкрементального ПИД-регулятора с асимметричным насыщением в диапазоне
Ошибка контроллера HMT находится где и — это частота вращения двигателя и идеальная частота вращения, соответственно.
Уравнение (2) может быть выражено следующим образом, если вместо и подставить ток насоса и приращение: где «» определяется рабочими диапазонами HMT. В диапазонах прямой пропорциональности, если передаточное число берется, знак плюс; в противном случае принимается знак минус. В диапазонах обратной пропорции, если передаточное число, берется знак минус; в противном случае используется знак плюса.В двухдиапазонном HMT диапазон H является прямо пропорциональным диапазоном. В положительной половине диапазона первая «±» в (4) принимает знак «плюс». А в отрицательной половине диапазона, вторая принимает знак минус. Диапазон HM — это диапазон обратной пропорции. Аналогично, первый «±» в (4) принимает знак минус, а второй — знак плюс. относится к току накачки при. и — верхний и нижний пределы тока накачки. В двухдиапазонном HMT гидравлический насос с регулируемым рабочим объемом представляет собой аксиально-поршневой насос Sauer Danfoss серии 90, где и mA (предназначен для устранения нулевой мертвой зоны механизма управления рабочим объемом).и являются асимметричными насыщенными верхним и нижним пределами градиента управляющего тока, которые зависят от рабочего объема насоса / двигателя, передаточного отношения, сопротивления транспортного средства и так далее.
На рисунке 2 выходная скорость HMT является функцией скорости двигателя. И подходящие параметры ПИД, и в (5) для каждого диапазона должны быть выбраны путем большого количества моделирования и экспериментов, чтобы уменьшить колебания скорости двигателя. В результате теоретических расчетов и моделирования параметры ПИД-регулятора выглядят следующим образом:,, в диапазоне,,, в диапазоне HM, мА и мА.
4. Логика сдвига диапазона
Логика сдвига диапазона — это порядок диапазонов. Для реализации бесступенчатой трансмиссии элементы переключения диапазонов HMT, такие как тормоза, должны управляться последовательно, и HMT может работать в последовательном диапазоне. Логика сдвига диапазона двухдиапазонного HMT показана в таблице 1.
Для реализации бесступенчатой трансмиссии элементы переключения диапазонов HMT, такие как тормоза, должны управляться последовательно, и HMT может работать в последовательном диапазоне. Логика сдвига диапазона двухдиапазонного HMT показана в таблице 1.
| |||||||||||||||||||
5.Условия сдвига диапазона
Сдвиг диапазона относится к процессу перехода между двумя соседними диапазонами. Чтобы улучшить качество переключения, условия переключения следующие: (1) Конечная выходная скорость HMT в текущем диапазоне должна быть равна исходной точке целевого диапазона. В каждом диапазоне применяется управление с обратной связью для управления скоростью двигателя. Идеальное время переключения достигается в соответствии с частотой вращения двигателя и частотой вращения двигателя. Целевая скорость двигателя достигается в идеальной точке переключения, когда скорости ведущего и ведомого дисков целевого тормоза равны.В двухдиапазонном HMT вычисляется идеальная скорость от диапазона H до диапазона HM: где,, и — количество зубьев шестерен от входного вала до соответственно; ,, и являются характеристическими параметрами трех планетарных передач. (2) Отклонение частоты вращения двигателя (абсолютное значение) должно быть больше минимального установленного значения. Во избежание повторения переключения необходимо установить минимальное отклонение частоты вращения двигателя. Только тогда, когда отклонение частоты вращения двигателя больше, чем оно может быть разрешено, переключение диапазона может быть разрешено. (3) Условие переключения на более высокую передачу должно быть выполнено.В зависимости от дорожной обстановки водитель выбирает больший диапазон с помощью переключателя диапазонов, чтобы ограничить скорость автомобиля. Только тогда, когда переключателем диапазона разрешено переключение на более высокую передачу, будет выполнено переключение на более высокий диапазон.
(3) Условие переключения на более высокую передачу должно быть выполнено.В зависимости от дорожной обстановки водитель выбирает больший диапазон с помощью переключателя диапазонов, чтобы ограничить скорость автомобиля. Только тогда, когда переключателем диапазона разрешено переключение на более высокую передачу, будет выполнено переключение на более высокий диапазон.
Подводя итог, условия переключения с диапазона H на диапазон HM равны
Условия переключения с диапазона HM на диапазон находятся где установленное значение переключателя диапазонов. Если выходная скорость HMT равна 0; если, HMT может работать только в диапазоне; и когда HMT может работать в диапазоне HM.- минимальное отклонение частоты вращения двигателя.
6. Стратегии переключения диапазона
В процессе переключения диапазона тормоз текущего диапазона отпускается, и включается тормоз целевого диапазона. Последовательность переключения тормоза определяется логикой сдвига диапазона, а время начала сдвига диапазона определяется условиями сдвига диапазона.
Направление вращения двигателя постоянно во время сдвига диапазона. Но изменение направления крутящего момента двигателя приводит к замене контуров высокого и низкого давления.Между тем, поток мощности в гидравлической системе меняется на противоположный. Скорость двигателя колеблется из-за резкого изменения давления и объемного КПД гидроагрегата. При этом резко меняются скоростные характеристики HMT и изменяются силовые характеристики, что приводит к появлению шума и вибрации.
Именно стратегии переключения диапазонов отвечают за идеальное включение и выключение тормозов, чтобы уменьшить время переключения и ударные нагрузки, а также минимизировать колебания входной и выходной скорости [10].Стратегии сдвига диапазона относятся к параметрам управления и их управляющим сигналам, включая изменение, время начала и время остановки. Стратегии смены диапазона в этой работе включают следующее: (1) Время перекрытия между двумя тормозами. относится ко времени начала включения встречного тормоза и относится ко времени начала отпускания выходящего тормоза. Время перекрытия между тормозами равно (2) Масляный буфер во время отпускания тормоза. На него влияют время начала, время окончания, максимальная ширина импульса и изменение ширины импульса сигнала пропорционального предохранительного клапана.(3) Регулировка рабочего объема насоса. Он определяется временем начала, временем окончания и изменением тока смещения.
относится ко времени начала включения встречного тормоза и относится ко времени начала отпускания выходящего тормоза. Время перекрытия между тормозами равно (2) Масляный буфер во время отпускания тормоза. На него влияют время начала, время окончания, максимальная ширина импульса и изменение ширины импульса сигнала пропорционального предохранительного клапана.(3) Регулировка рабочего объема насоса. Он определяется временем начала, временем окончания и изменением тока смещения.
Указанные выше время начала и время окончания являются приращениями времени относительно времени начала сдвига диапазона.
Время и изменение управляющих переменных стратегий переключения диапазонов должны определяться с помощью ряда моделирования и экспериментов и связаны со следующими факторами: (1) Схема механической трансмиссии. Из-за совпадения зубцов в конструкции механической трансмиссии фактическое передаточное число каждого диапазона не может быть равным идеальному передаточному отношению HMT, которое тесно связано с изменением тока смещения.(2) Характеристики отклика и объемный КПД замкнутого гидравлического контура. Изменение тока смещения может быть достигнуто только при сдвиге диапазона и может вызвать удар, если его синхронизация неверна. То есть ток смещения может изменяться после выключения отходящего тормоза. Его время начала больше нуля, а время окончания связано с характеристиками отклика замкнутого гидравлического контура. На изменение тока смещения влияет объемный КПД замкнутого гидравлического контура.(3) Параметры тормоза. На время перекрытия влияют диаметр гидроцилиндра и ход выходящего и встречного тормозов. На процесс изменения ширины импульса и максимальную длительность импульса пропорционального предохранительного клапана влияют коэффициент крутящего момента фрикционного диска, жесткость и начальное смещение возвратной пружины в выходном тормозе. Диаметр и длина гидравлического контура управления тормозом также влияют на управляющие сигналы.
Хотя стратегии сдвига диапазона различаются для разных схем HMT, существует несколько универсальных правил, а именно: (1) В процессе переключения с диапазона H на диапазон HM изменение тока смещения является отрицательным, в то время как в процессе переключения с диапазона HM на Диапазон H, положительный. (2),, и определяются временем запаздывания механизма управления гидронасосом переменной производительности и временем заполнения тормоза маслом. Если, то. Если, то и. Если, то и; немного меньше, чем. (3) Минимальное давление масла амортизатора давления масла должно быть больше минимального давления масла для перемещения поршня тормоза.
(2),, и определяются временем запаздывания механизма управления гидронасосом переменной производительности и временем заполнения тормоза маслом. Если, то. Если, то и. Если, то и; немного меньше, чем. (3) Минимальное давление масла амортизатора давления масла должно быть больше минимального давления масла для перемещения поршня тормоза.
Согласно результатам моделирования, стратегии сдвига диапазона из диапазона в диапазон HM следующие:,, и; мА; , как показано на рисунке 3. Управляющие сигналы от диапазона HM к диапазону такие же, как и при переключении на повышенную передачу по значению и времени, за исключением мА.
7. Моделирование стратегий управления
В соответствии со стратегиями управления модель контроллера построена в Matlab Simulink (рис. 4) и смоделирована с моделью транспортного средства, оснащенного двухдиапазонным HMT. Модель автомобиля построена на MSC Easy5 [16]. Результаты показаны на рисунке 5.
Когда коэффициент сопротивления качению равен 0,02, открытие дроссельной заслонки показано на рисунке 5 (a). Управляющие сигналы и скорости показаны на рисунках 5 (b), 5 (c) и 5 (d).
Перед открытием дроссельной заслонки двигателя (раньше) тормоз включается, а другой отключается. Двигатель находится в режиме холостого хода, HMT находится в нейтральном диапазоне, а автомобиль припаркован. При открытии дроссельной заслонки () сигнал управления начинает усиливаться, HMT переходит на диапазон, и автомобиль трогается с места.
Во время, условия сдвига диапазона HMT удовлетворяются от диапазона к диапазону HM, и контроллер начинает запускать стратегии сдвига диапазона (показанные на рисунке 3). Во время переключения диапазона () сигнал торможения уменьшается, а сигнал торможения постепенно увеличивается.Ток смещения уменьшается на 14 мА (), а частота вращения двигателя немного колеблется. После сдвига диапазона HMT переходит в диапазон HM. При уменьшении рабочего объема гидронасоса автомобиль ускоряется в отрицательной половине диапазона HM. Во время HMT проходит нулевую точку в положительную половину диапазона HM, в которой смещение равно нулю. В положительной половине диапазона HM, когда рабочий объем гидравлического насоса увеличивается в обратном направлении, автомобиль ускоряется.
Во время HMT проходит нулевую точку в положительную половину диапазона HM, в которой смещение равно нулю. В положительной половине диапазона HM, когда рабочий объем гидравлического насоса увеличивается в обратном направлении, автомобиль ускоряется.
При уменьшении дроссельной заслонки и уменьшении целевой скорости двигателя ток смещения увеличивается в обратном направлении, пока фактическая частота вращения двигателя не станет ниже ее целевой скорости.В момент времени скорость автомобиля начинает снижаться. В момент, когда дроссельная заслонка двигателя закрывается, целевая частота вращения двигателя изменяется, и ток смещения сильно изменяется. В момент, HMT возвращается к положительной половине диапазона HM, и автомобиль непрерывно замедляется. В момент, когда HMT входит в смещение диапазона от диапазона HM к диапазону H, управляющий сигнал тормоза постепенно уменьшается с увеличением управляющего сигнала торможения. Ток смещения увеличивается на 14 мА (), частота вращения двигателя также немного колеблется, и HMT переходит в диапазон H.В момент времени HMT возвращается в нейтральный диапазон.
На Рисунке 5 управляющий ток гидравлического насоса не колеблется в пределах диапазона. Повторяющегося сдвига нет. Двигатель падает до холостого хода после того, как HMT возвращается в нейтральное положение.
Идеальная и фактическая частота вращения двигателя показаны на Рисунке 5 (c). Запуск ракеты-носителя занимает 1,2 с (от 5 до 6,2 с). После запуска транспортного средства, очевидно, больше, чем. От s, поскольку нагрузка на двигатель больше, быстро падает до немного выше.После этого держится около, а максимальная разница составляет 44 об / мин (за исключением нулевых точек гидронасоса и переключения диапазонов). падает до менее чем после закрытия дроссельной заслонки. быстро снижается до. Из-за инерции автомобиля фактическая частота вращения двигателя сохраняется в течение некоторого времени (около 10,1 с) с регулировкой HMT. Когда скорость автомобиля приблизительно равна нулю, двигатель быстро переходит на холостой ход.
Скорость автомобиля показана на Рисунке 5 (d). При трогании с места, ускорении, замедлении и остановке транспортного средства не происходит колебаний скорости во время переключения диапазонов или в нулевых точках.
8. Аппаратное обеспечение в моделировании контура
HILS HMT — это метод тестирования, основанный на системе компьютерного моделирования. В тесте HILS объект HMT заменяет модель HMT в схеме моделирования. И он напрямую управляется контроллером через устройства ввода / вывода и интерфейсную схему.
Благодаря тому, что объект HMT подключен к схеме моделирования, этот тест может дополнительно подтвердить надежность результатов моделирования. Этот метод позволяет проверить правильность стратегии управления на основе компьютерного моделирования HMT и точно настроить параметры управления.Он также может проверить правильность имитационной модели HMT. Это особенно эффективно для использования модели серого ящика для описания HMT, которую трудно описать математической моделью.
На основе испытательного стенда динамического моделирования мощностью 330 кВт исходные объекты нагрузки приводят в движение и нагружают HMT в соответствии с динамическими характеристиками двигателя и транспортного средства посредством модели вождения в реальном времени. В этой системе HMT является материальным объектом, а все остальные части являются моделями или управляются моделями.Система HILS показана на Рисунке 6. И некоторые объекты теста HILS показаны на Рисунке 7.
Программное обеспечение HILS HMT состоит из модели контроллера HMT, модели двигателя, моделей автомобилей в реальном времени, и целевые окна в реальном времени. Под управлением модели двигателя в реальном времени компонент нагрузки 2 испытательного стенда динамического моделирования, который работает в соответствии с характеристиками двигателя, обеспечивает питание HMT. Под управлением модели транспортного средства в реальном времени компонент нагрузки 1 загружает HMT в соответствии с характеристиками движения транспортного средства. Модель контроллера осуществляет управление HMT в реальном времени в соответствии со стратегиями управления. HMT регулирует передаточное число в соответствии с изменением условий работы транспортного средства, что позволяет двигателю работать примерно с оптимальной скоростью (наилучшая экономия топлива или наилучшая производительность).
Модель контроллера осуществляет управление HMT в реальном времени в соответствии со стратегиями управления. HMT регулирует передаточное число в соответствии с изменением условий работы транспортного средства, что позволяет двигателю работать примерно с оптимальной скоростью (наилучшая экономия топлива или наилучшая производительность).
Входными данными модели двигателя в реальном времени является крутящий момент нагрузки, а выходными данными — частота вращения двигателя. На испытательном стенде динамического моделирования компонент нагрузки 2, моделирующий двигатель, находится под управлением режима постоянной скорости.Детектор скорости и крутящего момента 2 передает крутящий момент нагрузки обратно на компьютер моделирования. Результат расчета модели двигателя в реальном времени передается компоненту нагрузки 2.
Модель двигателя в реальном времени может быть описана следующим образом: где — инерция смоделированного двигателя, — статический выходной крутящий момент смоделированного двигателя, — крутящий момент нагрузки по обратной связи. датчика крутящего момента, является выходной скоростью компонента нагрузки 2, является управляющим напряжением контроллера компонента нагрузки 2, и является коэффициентом линейного преобразования управляющего напряжения компонента нагрузки 2.
В компьютерной имитационной модели входными и выходными данными модели транспортного средства являются выходная скорость и крутящий момент нагрузки HMT, соответственно. На испытательном стенде динамического моделирования компонент нагрузки 1, моделирующий транспортное средство, находится под управлением режима постоянного крутящего момента. Чтобы обеспечить соответствие входных и выходных данных расчетам в имитационной модели, необходимо ввести «виртуальную ось» в модель транспортного средства в реальном времени.
Выходной крутящий момент модели транспортного средства в реальном времени: где — жесткость на кручение виртуальной оси, — это демпфирование виртуальной оси, — это выходной крутящий момент модели транспортного средства в реальном времени, — это сигнал скорости обратной связи датчика скорости, — угловая скорость эквивалентной инерции транспортного средства, — управляющее напряжение контроллера компонента нагрузки 1, и — коэффициент линейного преобразования управляющего напряжения компонента нагрузки 1.![]()
Под нагрузкой компонент 1, работающий без нагрузки в ручном режиме управления, результаты теста переключения диапазона HMT показаны на рисунке 8. Рисунки показывают, что процесс переключения диапазона плавный и колебаний скорости не происходит. Это показывает, что стратегия управления сдвигом диапазона, определяемым скоростью двигателя, является разумной. Когда нагрузка увеличивается, выходная скорость явно колеблется в процессе сдвига диапазона. В нем говорится, что стратегии управления сдвигом диапазона необходимы.
Когда компоненты нагрузки 1 и 2 управляются автоматически, кривая дроссельной заслонки двигателя показана на рисунке 9 (a), а отклики HMT показаны на рисунке 9 (b).Основные показатели эффективности показаны на рисунках 9 (c) и 9 (d). Как показано на рисунке 9, при изменении дроссельной заслонки двигателя передаточное отношение HMT изменяется под управлением модели контроллера. На стадии стабилизации дроссельной заслонки частота вращения двигателя регулируется до близкой к оптимальной, а правила ее изменения соответствуют результатам моделирования. Благодаря регулировке характеристик двигателя и инерции автомобиля двигатель может работать на максимальной скорости в течение длительного времени.
9. Выводы
(1) Предлагается интегрированная стратегия управления HMT.Получен алгоритм стратегии асимметричного насыщенного инкрементального ПИД-регулирования скорости в условиях диапазона и сдвига диапазона. В этой статье представлена логика переключения диапазонов и стратегии управления переключением диапазонов. (2) Модель контроллера построена в Matlab Simulink и смоделирована с моделью транспортного средства, оснащенного двухдиапазонным HMT. Результаты моделирования показывают, что под управлением предложенных стратегий двигатель работает со скоростью, близкой к идеальной, и транспортное средство соответствует требованиям вождения с изменением дроссельной заслонки.(3) Выполняется HILS-тест HMT. Результаты испытаний показывают, что процесс переключения диапазона плавный и колебаний скорости не происходит. На стадии стабилизации дроссельной заслонки частота вращения двигателя регулируется до близкой к оптимальной скорости, а правила ее изменения соответствуют результатам моделирования. (4) Результаты демонстрируют, что модель HMT верна, а стратегия управления разумна. Система HILS работает надежно и соответствует требованиям исследования динамических характеристик HMT.
На стадии стабилизации дроссельной заслонки частота вращения двигателя регулируется до близкой к оптимальной скорости, а правила ее изменения соответствуют результатам моделирования. (4) Результаты демонстрируют, что модель HMT верна, а стратегия управления разумна. Система HILS работает надежно и соответствует требованиям исследования динамических характеристик HMT.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Благодарности
Эта работа поддержана Национальным фондом естественных наук Китая (грант № 51175449) и Программой научных исследований высшего образования провинции Хэбэй (грант № Z2015081).
Конструкция и управление гидромеханической трансмиссией вездехода
Особенности
- •
Предложен прототип гидромеханической силовой установки.
- •
В системе можно использовать метод разделения мощности и рекуперативное торможение.
- •
Подробно обсуждается метод расчета параметров гидромеханической системы.
- •
Управление ADRC адаптировано для управления соотношением скоростей системы.
- •
Движением транспортного средства можно управлять с помощью определенного передаточного числа.
Abstract
Исследуется гидромеханическая бесступенчатая трансмиссия вездехода. Коробка передач с одинарной планетарной передачей и входным дифференциалом.Гидравлический насос с регулируемой регулировкой и гидравлический двигатель оснащены для увеличения диапазона скоростей. Проанализировано влияние параметров на скорость и крутящий момент. Изучен метод расчета параметров системы. Алгоритм управления активным подавлением помех с упреждающей компенсацией принят для управления соотношением скоростей. Создан прототип гидромеханической бесступенчатой трансмиссии. Динамические характеристики транспортного средства и регулировка передаточного числа исследуются путем моделирования и экспериментов.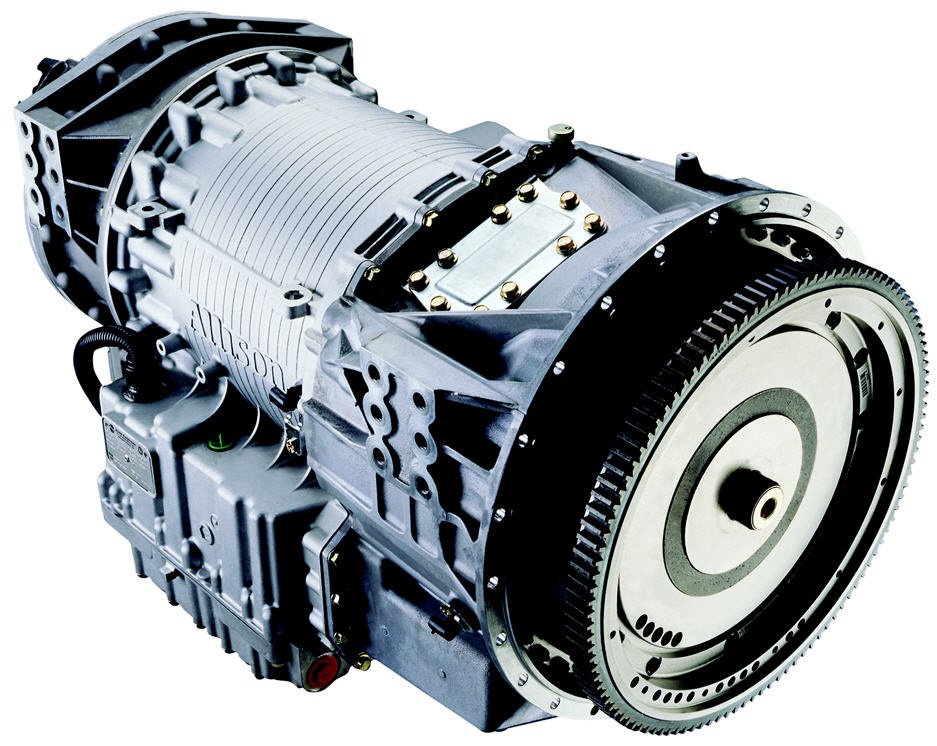 Проверяются и обсуждаются характеристики вождения и торможения автомобиля. Результаты показывают, что ускорение и замедление транспортного средства можно контролировать, изменяя коэффициент смещения. Управление активным подавлением помех с упреждающей компенсацией эффективно при управлении соотношением скоростей. Он снижает погрешность передаточного отношения бесступенчатой трансмиссии и обладает хорошей адаптируемостью. Результаты могут быть использованы для оптимизации конструкции и стратегии управления гидромеханической бесступенчатой трансмиссией.
Проверяются и обсуждаются характеристики вождения и торможения автомобиля. Результаты показывают, что ускорение и замедление транспортного средства можно контролировать, изменяя коэффициент смещения. Управление активным подавлением помех с упреждающей компенсацией эффективно при управлении соотношением скоростей. Он снижает погрешность передаточного отношения бесступенчатой трансмиссии и обладает хорошей адаптируемостью. Результаты могут быть использованы для оптимизации конструкции и стратегии управления гидромеханической бесступенчатой трансмиссией.
Ключевые слова
Гидромеханическая
Бесступенчатая трансмиссия
Гидростатическая трансмиссия
Управление ADRC
Регенеративное торможение
Передаточное число
Рекомендуемые статьи Цитирующие статьи (0)
Полный текст© 2020 Elsevier Ltd. .
Рекомендуемые статьи
Цитирующие статьи
(PDF) Проектирование гидромеханической передачи с использованием сетевого анализа
54 Духван Сун, Сунгхо Хван и Хюнсу Ким
Мощностьобъединена на входной стороне для входа. система классификации ПРО
сдвоенного типа.Взаимосвязь между заданной мощностью
, которая определяет соединения HSU, а также передаточным числом
, и передаточным числом была изучена для всех
в качестве положения разделения мощности. Новая классификация
типов входов и выходов связанных HMT в
состоит из трех заглавных букв в зависимости от того, где находится
литературы [4]. Для исследования мощности и скорости
мощность разделяется и объединяется. В выходных характеристиках
передачи с разделением мощности, таких как
, мощность объединяется на выходе
HMT, широко используется графический метод [5].
сторона HMT и разделена планетарной передачей,
В середине 1980-х годов был введен аналитический метод
, который расположен на входной стороне HMT. В
В
, называемое «сетевой анализ» [6]. Сеть
новая классификация выходного сцепленного типа
анализ может обрабатывать величину и направление
HMT, первая буква указывает компонент мощности
в каждом компоненте трансмиссии
планетарной передачи , который подключается к системе HMT input
путем построения матриц крутящего момента и скорости.
вал. Вторая буква обозначает планетарную передачу
Сетевой анализ был применен к компоненту split-
, который подключен к входной стороне
power HMT, который имеет более трех валов на одном
HSU. Последняя (третья) буква показывает, как работает узел скорости HMT
[7]. Для трансмиссий с разделенной мощностью
подсоединяется к выходному валу. Связь
с входной связью между охватом передаточного числа вариатора и трехвальным HMT типа
может быть классифицирована как
, общий охват передаточного числа был исследован с использованием метода
.В этом случае первая буква — «I», что означает
графических отображений проектных параметров [8].
, что источник питания подключен к входной стороне
Для разработки HMT, который может быть применен к
HMT. Вторая буква обозначает планетарный
крупногабаритных легковых и грузовых автомобилей,
редуктора, который подключен к выходу
, необходимо решить следующие ключевые проблемы:
HSU.Последняя буква представляет компонент планетарной передачи
, который подключен к выходу
(a), как спроектировать HSU, чтобы удовлетворить размер и
HMT. На рис. 1 показаны 12 конфигураций трех шумовых ограничений
;
валы HMT представлены по новой классификации. Для
(b), как спроектировать конфигурацию HMT, чтобы минимизировать
, например, в SRO типа HMT солнечная шестерня
обеспечивает циркулирующую мощность.
подключен к входной стороне HMT, а коронная шестерня
подключается к входу HSU, в то время как выход
Исследования HMT в последние годы показали, что в основном
HSU соединены с выходным валом HMT.
сфокусировано на технологиях, ориентированных на продукт [1, 9–11]
, в то время как несколько отчетов можно найти для метода проектирования —
ology для характеристик потока мощности и скорости.
В этой статье описывается систематический подход к конструкции механической системы трехвального HMT
3 АНАЛИЗ СЕТИ
.
Соотношения мощности и скорости исследуются для
Типичный HMT состоит из одного или двух HSU и
всех возможных конфигураций трехвального редуктора HMT
со сложной зубчатой передачей, который образует замкнутый контур.
с использованием сетевого анализа. На основе сети
. Эта конфигурация с замкнутым контуром вызывает результаты анализа силовой цепи.
. Предлагается методология проектирования для конфигурации HMT
, которая затрудняет применение конфигурации конвенции
.
метод анализа, например графический анализ. Анализ сети
, предложенный Хедманом [6] isapower-
, полный инструмент, используемый для анализа величины и направления
мощности для сложной системы передачи
2 ТРЕХВАЛЬНЫЙ HMT
, такой как HMT.В сетевом анализе механические компоненты
делятся на вал и элементы TM (транс-
Трехвальный HMT состоит из одного HSU и
миссии), таких как шестерня, сцепление и т. Д. планетарные передачи. В трехвальном HMT возможно построение матриц крутящего момента и скорости
, скорость
позволяет построить 12 механических конфигураций [3].
Определяются узели узел крутящего момента, а эффективность
из
Nomura классифицирует трехвальный HMT как входной
каждый элемент TM может быть включен в тип разделения крутящего момента
или тип разделения выхода в зависимости от
Матрица.Подробности сетевого анализа можно найти в позиции
, где происходит разделение мощности. На входе
в литературе [6].
HMT типа split, разделение мощности происходит на входе
Рисунок 2 — сетевая модель HMT типа IRC
сторона HMT, и можно получить шесть вариантов
на рисунке 1. Для HMT, используемого в В данном исследовании насос
Для HMT, используемого в В данном исследовании насос
в зависимости от схемы соединения
тактаST изменяется от -1 до +1, а у двигателя
HSU с планетарной передачей.Аналогичным образом,
ходфиксируется как ST = + 1. HG означает, что спиральный
с шестью вариациями HMT может быть сконструирован для типа
с раздельным выходом. механизм. Матрицы крутящего момента и скорости для сети
D20703 © IMechE 2005Proc. IMechE. Vol. 219 Часть D: J. Automobile Engineering
гостем 6 сентября 2012 г.
Обсуждаются разработка и испытания автомобильной гидромеханической трансмиссии (ГМТ) на транспортных средствах.Этот гидромеханический тип бесступенчатой трансмиссии (CVT) продемонстрировал 20% -ное улучшение экономии топлива при комбинированном ездовом цикле Federal (по сравнению с серийной трехступенчатой автоматической коробкой передач) без каких-либо модификаций двигателя. Скорость от 0 до 60 миль в час для автомобиля, оснащенного вариатором, равна скорости аналогичного автомобиля, оснащенного автоматической коробкой передач. HMT приводит к увеличению выбросов, наиболее серьезной проблемой является увеличение содержания оксидов азота на 40%.Наблюдение за характеристиками деградации серийного двигателя, широко используемого для испытаний HMT, позволяет предположить, что режим работы с высоким крутящим моментом и низкой скоростью, необходимый для максимальной эффективности, не оказывает существенного отрицательного воздействия на срок службы двигателя. Стабильность частоты вращения двигателя при управлении с обратной связью не является проблемой, и любые колебания частоты вращения двигателя, по-видимому, не приводят к значительному снижению экономии топлива. Средний КПД первого поколения HMT всего на 3% выше, чем у автоматической коробки передач.Предсерийный прототип HMI второго поколения является многообещающим с точки зрения веса, размера и стоимости изготовления. Шум по-прежнему вызывает беспокойство.
Информация для СМИ
Предметный указатель
Информация для подачи
- Регистрационный номер: 00396348
- Тип записи: Публикация
- Агентство-источник: Национальное управление безопасности дорожного движения
- Номер отчета / статьи : SAE 780688, HS-025 556U
- Номера контрактов: DOE-EY-76-C-03-1165
- Файлы: HSL, USDOT
- Дата создания: 31 августа 1985 г., 00:00
Энергии | Бесплатный полнотекстовый | Низкоуровневое управление гибридными гидромеханическими трансмиссиями тяжелых мобильных рабочих машин
1.Введение
Заботы об окружающей среде, ужесточение законодательства и требования более высокой производительности повысили интерес к гидравлическим гибридным трансмиссиям для тяжелых мобильных рабочих машин. Для этих транспортных средств комбинация двигателя внутреннего сгорания (ДВС) с гидроаккумуляторами предлагает привлекательные улучшения по нескольким параметрам, таким как энергоэффективность, производительность и работоспособность машины [1]. Однако гидравлическая гибридизация, как правило, увеличивает зависимость от контроля.В этом контексте часто решаемая проблема связана с оптимальным использованием дополнительного источника энергии; постоянно во время работы транспортного средства требуется правильное решение, следует ли заряжать аккумулятор или разряжать его [2]. Лицо, принимающее это решение, обычно называют стратегией управления высокого уровня, и в прошлом она исследовалась как для дорожных транспортных средств [3,4], так и для мобильных рабочих машин [5,6,7]. Что касается управления верхнего уровня, то гидравлическая гибридная рабочая машина полагается на стабильное, точное и правильно реализованное управление нижнего уровня. Этот аспект ограниченно рассматривался для этого приложения в прошлом и является основным предметом данной статьи. Подход, основанный на развязанном управлении множеством входов и множественных выходов (MIMO), ранее разработанный авторами [8], представлен и сравнивается с базовым подходом в двух ездовых циклах для эталонного транспортного средства в Hardware-In-the-Loop (HWIL). ) моделирования. Для разделения в подходе используется линейная модель общей гибридной многорежимной гидромеханической трансмиссии (HMT), подходящая для характерных особенностей тяжелой мобильной рабочей машины, в данном документе на примере колесного погрузчика.В этой статье низкоуровневое управление относится к концепции, применяемой в традиционной теории управления, для которой основное внимание уделяется реакции системы, динамике и стабильности, а не эффективности использования топлива. Таким образом, его цель состоит в том, чтобы управлять реализацией и динамической координацией потоков мощности, требуемых оператором станка и стратегией управления высокого уровня [2].
Этот аспект ограниченно рассматривался для этого приложения в прошлом и является основным предметом данной статьи. Подход, основанный на развязанном управлении множеством входов и множественных выходов (MIMO), ранее разработанный авторами [8], представлен и сравнивается с базовым подходом в двух ездовых циклах для эталонного транспортного средства в Hardware-In-the-Loop (HWIL). ) моделирования. Для разделения в подходе используется линейная модель общей гибридной многорежимной гидромеханической трансмиссии (HMT), подходящая для характерных особенностей тяжелой мобильной рабочей машины, в данном документе на примере колесного погрузчика.В этой статье низкоуровневое управление относится к концепции, применяемой в традиционной теории управления, для которой основное внимание уделяется реакции системы, динамике и стабильности, а не эффективности использования топлива. Таким образом, его цель состоит в том, чтобы управлять реализацией и динамической координацией потоков мощности, требуемых оператором станка и стратегией управления высокого уровня [2].1.1. Предыдущая работа
Фундаментальным принципом низкоуровневого управления гидравлическими гибридами является вторичный контроль, который присутствует в исследованиях гидравлической энергии с 1980-х годов; см., д.г., [9,10]. Идея этой концепции заключается в том, что регулирование скорости происходит непосредственно на грузе. Во вращающейся области эта идея реализуется путем воздействия на насос / двигатель (агрегат) переменного рабочего объема постоянным давлением. Таким образом, крутящий момент на валу агрегата пропорционален его настройке рабочего объема, который, в свою очередь, может использоваться для управления скоростью вала с обратной связью. Следовательно, стабильность и реакция вторичных управляемых систем зависят от быстрых и точных контроллеров перемещения [11,12].Вторичный контроль является центральным в управлении гидравлическими гибридами, поскольку он обеспечивает рекуперацию энергии; при торможении груза агрегат может работать как насос для зарядки аккумулятора.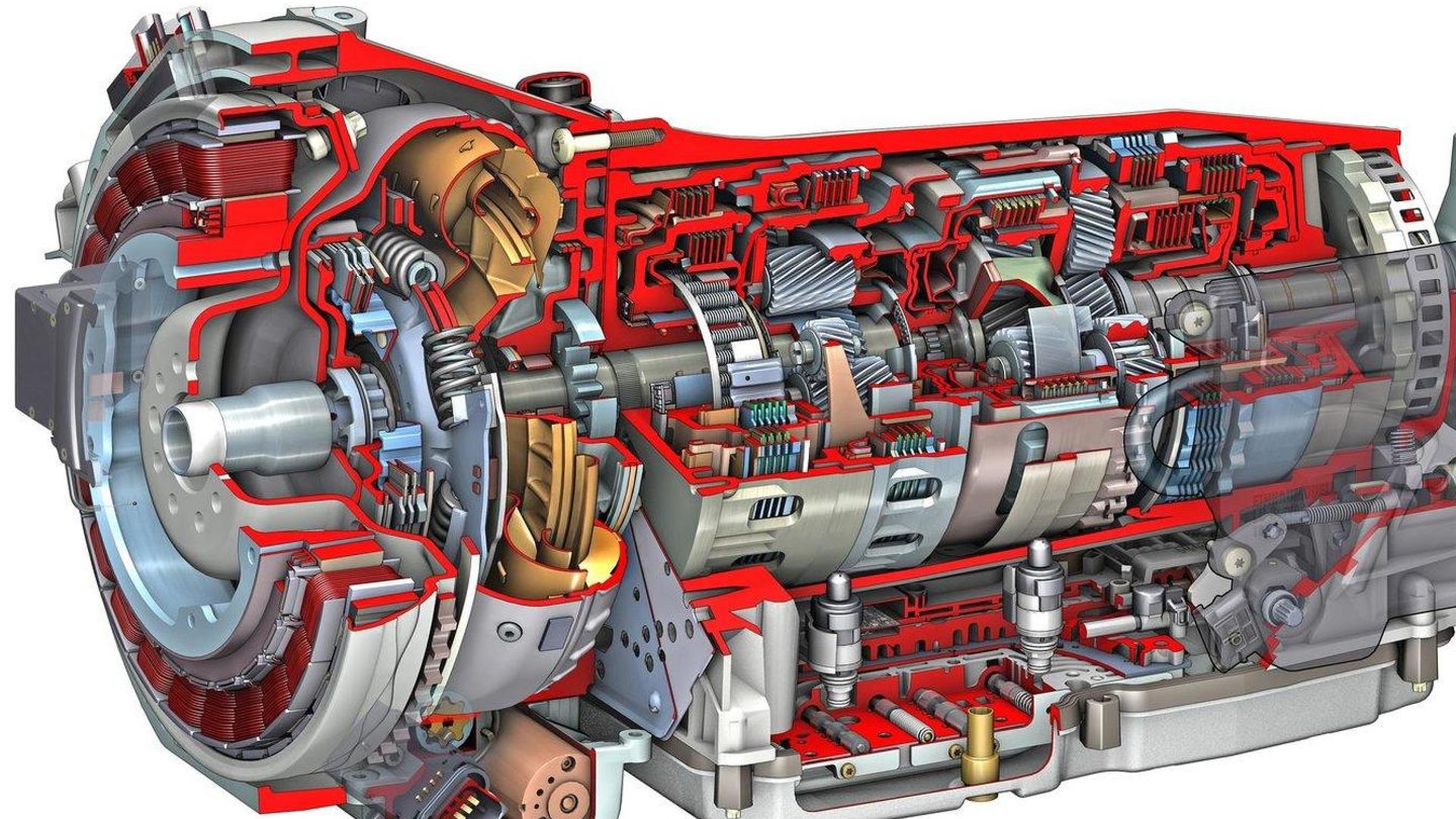 [15], в котором один гидравлический блок использовался для управления крутящим моментом, а другой — для регулирования давления. Для ДВС было предложено управление скользящим режимом с подавлением возмущений крутящего момента от трансмиссии. В [3,16] была предложена иерархическая стратегия управления гибридами с разделением мощности.В этом случае оба гидравлических блока управляют управлением крутящим моментом, в то время как один блок косвенно управляет регулированием давления, нагружая двигатель оптимальным крутящим моментом, требуемым стратегией среднего уровня. Для управления частотой вращения двигателя использовался ПИ-регулятор с упреждающей передачей крутящих моментов для подавления возмущений.
[15], в котором один гидравлический блок использовался для управления крутящим моментом, а другой — для регулирования давления. Для ДВС было предложено управление скользящим режимом с подавлением возмущений крутящего момента от трансмиссии. В [3,16] была предложена иерархическая стратегия управления гибридами с разделением мощности.В этом случае оба гидравлических блока управляют управлением крутящим моментом, в то время как один блок косвенно управляет регулированием давления, нагружая двигатель оптимальным крутящим моментом, требуемым стратегией среднего уровня. Для управления частотой вращения двигателя использовался ПИ-регулятор с упреждающей передачей крутящих моментов для подавления возмущений.В отличие от исследования, представленного выше, в данной статье основное внимание уделяется тяжелым мобильным рабочим машинам. Они отличаются от дорожных приложений по нескольким пунктам, что сказывается на низкоуровневом управлении.Здесь в качестве примера используется колесный погрузчик, но рассуждение справедливо и для многих других рабочих машин.
1.2. Колесные погрузчики
Колесные погрузчики — универсальные рабочие машины. По сравнению с дорожными транспортными средствами они обычно работают в коротких повторяющихся циклах с переходными процессами большой мощности. В дополнение к трансмиссии колесные погрузчики также выполняют рабочие функции, что приводит к появлению множества значительных потребителей энергии. Эти аспекты имеют сильное влияние как на конструкцию [7], так и на высокоуровневое управление [5] гибридных колесных погрузчиков и, следовательно, также должны учитываться при низкоуровневом управлении.Кроме того, уникальные условия и сложный характер колесных погрузчиков заставляют оператора играть ключевую роль в максимальном увеличении их производительности [17]. В этом смысле управление крутящим моментом трансмиссии обычно желательно и ожидается оператором [18]. По сравнению с дорожными транспортными средствами, большие колесные погрузчики требуют более широких диапазонов преобразования скорости / крутящего момента трансмиссии. В результате негибридные HMT с разделением мощности часто рассматриваются как жизнеспособные альтернативы гидродинамической трансмиссии (преобразователь крутящего момента) [19]. Эти системы сочетают в себе гидростатическую трансмиссию (HST) с планетарными зубчатыми передачами, тем самым обеспечивая высокую эффективность и оптимальную работу двигателя [20].Обычно для обеспечения достаточного диапазона преобразования, эффективности и удельной мощности требуются многорежимные HMT с муфтами [21]. Каждый режим состоит из одной из обычно упоминаемых одномодовых конфигураций; Разделение мощности на входе (ICPS), разделение мощности на выходе (OCPS) и составное [22]. Гибридный HMT в этой статье называется HMT с гидроаккумулятором в цепи HST, Таким образом, термин охватывает как последовательные, так и гибридные конфигурации с разделением мощности. Часто упоминаемый параллельный гибрид выходит за рамки данной статьи.См. [1] для попытки сопоставить все гибридные конфигурации, возможные как для трансмиссии, так и для рабочих функций колесного погрузчика.
В результате негибридные HMT с разделением мощности часто рассматриваются как жизнеспособные альтернативы гидродинамической трансмиссии (преобразователь крутящего момента) [19]. Эти системы сочетают в себе гидростатическую трансмиссию (HST) с планетарными зубчатыми передачами, тем самым обеспечивая высокую эффективность и оптимальную работу двигателя [20].Обычно для обеспечения достаточного диапазона преобразования, эффективности и удельной мощности требуются многорежимные HMT с муфтами [21]. Каждый режим состоит из одной из обычно упоминаемых одномодовых конфигураций; Разделение мощности на входе (ICPS), разделение мощности на выходе (OCPS) и составное [22]. Гибридный HMT в этой статье называется HMT с гидроаккумулятором в цепи HST, Таким образом, термин охватывает как последовательные, так и гибридные конфигурации с разделением мощности. Часто упоминаемый параллельный гибрид выходит за рамки данной статьи.См. [1] для попытки сопоставить все гибридные конфигурации, возможные как для трансмиссии, так и для рабочих функций колесного погрузчика.1,3. Резюме: Требования к низкоуровневому управлению для мобильных рабочих машин
В свете тем, обсужденных в предыдущих разделах, можно ожидать, что стратегия низкоуровневого управления трансмиссией тяжелой гидравлической гибридной мобильной рабочей машины будет:
легко подключиться к высокоуровневой стратегии управления,
учитывать динамику контроллера смещения,
регулировать давление на ручке,
ручку управления скоростью ICE,
обеспечивать для оператора,
учитывают помехи от внешних нагрузок и дополнительных потребителей энергии,
можно легко применить к многорежимной конфигурации передачи с разделением мощности.
В этой статье разделенное управление MIMO рассматривается как подходящий кандидат для этой стратегии.
1.4. Разделенное управление
Основная идея разделенного управления состоит в том, что система MIMO преобразуется в несколько контуров с одним входом и одним выходом (SISO), которые рассматриваются как отдельные системы. Для этого сначала реализуется подходящая стратегия развязки, обычно основанная на модели рассматриваемой системы [23]. Гибридные HMT содержат системные перекрестные связи [8], и разделенное управление может справиться с ними с помощью простой реализации и настройки [24].Другой аспект, который мотивирует независимое управление гибридными HMT, заключается в том, что одним из контроллеров является драйвер, который управляет выходной скоростью. Следовательно, этот контур недоступен для схемы управления и должен быть максимально изолирован. Кроме того, стратегия развязки может использоваться для преобразования системы в систему, которая не зависит от конфигурации передачи. Эта функция очень привлекательна для многорежимной концепции, так как конфигурация меняется между каждым режимом, и изменение режима должно быть как можно более плавным [25].
Для этого сначала реализуется подходящая стратегия развязки, обычно основанная на модели рассматриваемой системы [23]. Гибридные HMT содержат системные перекрестные связи [8], и разделенное управление может справиться с ними с помощью простой реализации и настройки [24].Другой аспект, который мотивирует независимое управление гибридными HMT, заключается в том, что одним из контроллеров является драйвер, который управляет выходной скоростью. Следовательно, этот контур недоступен для схемы управления и должен быть максимально изолирован. Кроме того, стратегия развязки может использоваться для преобразования системы в систему, которая не зависит от конфигурации передачи. Эта функция очень привлекательна для многорежимной концепции, так как конфигурация меняется между каждым режимом, и изменение режима должно быть как можно более плавным [25].1,5. Цель и ограничения
Основная цель данной статьи — представить экспериментальные результаты, показывающие принцип работы предложенной стратегии независимого управления. Это выполняется в моделировании HWIL эталонного автомобиля для двух случаев. Первый — это упрощенный ездовой цикл с загрузкой и перемещением, а второй — это серия ступенчатых реакций. Предлагаемая стратегия сравнивается с базовым подходом, который игнорирует перекрестные связи системы. Целью этого сравнения является оценка влияния взаимосвязей на характеристики управления и того, как этот эффект обрабатывается независимой стратегией.
Анализ ограничен управлением в пределах одного режима, т. Е. Сдвиги режима не учитываются, и эталонная передача имеет одномодовый тип. Кроме того, основное внимание уделяется передаче, а рабочие функции рассматриваются как возмущающие моменты или потоки.
2. Линейная модель
В этом разделе представлена линейная модель с сосредоточенными параметрами, используемая для вывода стратегии развязки. Модель выражена в частотной области в соответствии с Мерриттом [26] и была получена авторами в [8]. На рисунке 1 показана модель с определенными состояниями (psys, ωout, ωICE), управляющими сигналами (ε1, ref, ε2, ref, uICE) и возмущениями (Qext, Text, ICE, Text, v). Как упоминалось ранее, он описывает передачу в режиме m, поэтому муфты не показаны на рисунке. Сделаны следующие основные допущения:
На рисунке 1 показана модель с определенными состояниями (psys, ωout, ωICE), управляющими сигналами (ε1, ref, ε2, ref, uICE) и возмущениями (Qext, Text, ICE, Text, v). Как упоминалось ранее, он описывает передачу в режиме m, поэтому муфты не показаны на рисунке. Сделаны следующие основные допущения:Давление в баллоне pT≈0 постоянно.
Оба гидроагрегата могут работать в четырех квадрантах, то есть ε1 / 2∈ [-1,1].
Емкость гидравлического контура во многом определяется емкостью аккумулятора C и является высокой.
Аккумулятор работает в пределах минимального и максимального давления (т.е. он никогда не бывает пустым).
Инерция жидкости и влияние динамики линии жидкости пренебрежимо малы на интересующих частотах.
Вся механическая инерция сосредоточена в двигателе (JICE) и транспортном средстве (Jv).
Двигатель постоянно работает на холостом ходу или выше.
Подсистема передачи без потерь, и каждый режим m состоит из одной из ранее описанных базовых одномодовых конфигураций.
ω1ω2 = ambmcmdmωICEωout, TICETout = −ambmcmdmtT1T2 = −am − cm − bm − dmT1T2
(1)
Аналогичное описание ранее использовалось для оптимизации и управления гибридными HMT с разделением мощности для легковых автомобилей [3,13]. Значения am, bm, cm и dm являются следствием передаточных чисел и постоянных планетарной передачи, действующих в режиме m.Кроме того, в результате последнего предположения выше am ≠ 0 и dm ≠ 0. Модель в уравнении (1) затем может использоваться для удобного описания ICPS (bm = 0, см 0), OCPS (bm ≠ 0, cm = 0) и составных архитектур (bm ≠ 0, см 0). Последовательная гибридная конфигурация описывается с помощью bm = cm = 0. Причинные эффекты входных сигналов и возмущений в состояниях в модели на рисунке 1 проиллюстрированы блок-схемой на рисунке 2. Можно заметить, что подсистема передачи (am, bm, cm, dm) вводит перекрестные связи между psys и ωout, на которые влияют изменения как ε1, ref, так и ε2, ref.На ωICE влияют все управляющие сигналы. Однако, поскольку нет пути от uICE к psys и ωout, двигатель не подвержен перекрестным связям, а скорее помехам от ε1, ref и ε2, ref. Что касается нестабильности, перекрестные связи создают скрытые петли обратной связи, которые могут вызывать проблемы в системах MIMO [24]. В частотной области модель описывается следующим образом:
Можно заметить, что подсистема передачи (am, bm, cm, dm) вводит перекрестные связи между psys и ωout, на которые влияют изменения как ε1, ref, так и ε2, ref.На ωICE влияют все управляющие сигналы. Однако, поскольку нет пути от uICE к psys и ωout, двигатель не подвержен перекрестным связям, а скорее помехам от ε1, ref и ε2, ref. Что касается нестабильности, перекрестные связи создают скрытые петли обратной связи, которые могут вызывать проблемы в системах MIMO [24]. В частотной области модель описывается следующим образом:psysωoutωICE = GO (s) εref, 1εref, 2uICE − 1Cs + KC0001Jvs + Bv0001JICEs + BICEQextText, vText, ICE
(2)
где GO (s) — матрица передаточной функции без обратной связи:GOs = D1amωICE, 0 + bmωout, 0Gε, 1sCs + KCD2cmωICE, 0 + dmωout, 0Gε, 2sCs + KC0 − bmD1psys, 0Gε, 1sJvs + Bv − dmD2psys, 0Gε, 2sJvs + Bv0 −JSys, Bv0 − cmDICE2ps 0Gε, 2sJICEs + BICEKICEGTsJICEs + BICE
(3)
Для стратегии развязки удобно разложить GO (ы) на множители в соответствии с:GO (s) = Gsys (s) Gts, м (с)
(4)
где Gsyss — диагональная матрица, которая содержит управляющую динамику каждого состояния:Gsyss = 1Cs + KC0001Jvs + Bv0001JICEs + BICE
(5)
а Gts, ms содержит перекрестные связи:Gts, ms = D1amωICE, 0 + bmωout, 0Gε, 1sD2cmωICE, 0 + dmωout, 0Gε, 2s0 − bmD1psys, 0Gε, 1s − dmD2psys, 0Gε, 2s0 − amD1psys, 0Gε, 1s − cmD2psys, 9000Gε
(6)
В предыдущей работе авторов [29] было обнаружено, что регуляторы перемещения могут быть представлены передаточными функциями второго порядка:ε1ε1, ref = Gε, 1s = 1s2ωa, 12 + 2δa, 1ωa, 1s + 1ε2ε2, ref = Gε, 2s = 1s2ωa, 22 + 2δa, 2ωa, 2s + 1
(7)
Турбо-динамика моделируется согласно [30]:4.Эталонный автомобиль
Основной целью этого подхода к управлению являются колесные погрузчики большего размера с многорежимными трансмиссиями. Однако в этой статье основное внимание уделяется управлению в режиме, поэтому были выбраны компактный колесный погрузчик и одномодовая трансмиссия, размеры которых соответствуют испытательному стенду и его ограничениям по мощности. Параметры автомобиля приведены в таблице 1. Эталонная трансмиссия, показанная на рисунке 4а, была типа ICPS. Для этой конфигурации постоянные подсистемы передачи могут быть идентифицированы в соответствии с:
Параметры автомобиля приведены в таблице 1. Эталонная трансмиссия, показанная на рисунке 4а, была типа ICPS. Для этой конфигурации постоянные подсистемы передачи могут быть идентифицированы в соответствии с:ambmcmdm = i101i2RR − 1i2R
(19)
Эталонный автомобиль был смоделирован для двух ездовых циклов.Первый был упрощенной версией цикла загрузки и переноса [17], показанной на рисунке 4b. В цикле погрузки и транспортировки колесный погрузчик входит в гравийную кучу, чтобы заполнить ковш с низкой скоростью, разворачивается, а затем перемещается с более высокой скоростью к приемнику груза для опорожнения ковша. Целью моделирования этого цикла было изучение основной операции разделенного управления для реалистичного случая с относительно медленной динамикой.Второй цикл представлял собой серию шагов в опорных сигналах и сигналах возмущения.Этот случай не был таким реалистичным, как упрощенный цикл нагрузки и переноса, но здесь целью было изучить динамические связи в системе и влияние помех от дополнительных потребителей энергии, таких как рабочие функции.
7. Обсуждение
По сравнению со стратегией независимого управления, базовый подход страдает от установившихся ошибок, поскольку он не может предсказать возмущения, вызванные внутренними перекрестными связями системы. Естественно, с этой проблемой можно было справиться путем интеграции элементов в контроллер.Однако это приведет к фазовой задержке и, следовательно, отрицательно повлияет на стабильность. Что еще более важно, интеграторы могут отрицательно повлиять на функциональность в случае многорежимной передачи. В этих системах кинематика трансмиссии изменяется между режимами, что означает, что наматывание интегратора необходимо обрабатывать для обеспечения плавного переключения режимов [25]. Однако в подходе с развязкой матрица развязки решает эту проблему упреждающим образом. Кроме того, стратегия разъединения автоматически управляет управлением крутящим моментом водителя, которое сильно зависит от конфигурации трансмиссии [13]. Разделенная стратегия также автоматически обрабатывает отклонение возмущений, воздействующих на ДВС, что в противном случае обычно выполняется в отдельном контуре управления двигателем [3,15]. Следует отметить, что стратегия управления сама по себе не гарантирует энергоэффективной работы машины. Например, нецелесообразно опорожнять аккумулятор, когда автомобиль стоит на месте, что приводит к увеличению скорости двигателя. В окончательной реализации необходима высокоуровневая стратегия, гарантирующая, что аккумулятор используется с экономией топлива [3].Кроме того, желаемый выходной крутящий момент должен быть смешан с фрикционными тормозами во время торможения транспортного средства [2]. Некоторые расширения являются естественными, чтобы сделать предлагаемую стратегию управления для рассмотрения всей машины. Например, внешние возмущения, Qext и Text, ICE, должны быть расширены, чтобы учитывать рабочие функции с их входными сигналами оператора, исполнительными механизмами и состояниями. Они могут быть реализованы как рабочая гидравлическая система на двигателе (Text, ICE), как в случае с обычным колесным погрузчиком [17], или как вторичная управляемая система, подключенная к гидравлическому контуру (Qext) [6].Дополнительным аспектом для колесных погрузчиков является то, что нагрузка (например, гравийная куча) связывает трансмиссию и рабочие функции во время заполнения ковша [17]. Таким образом, на этом этапе следует ожидать перекрестной связи между Text, v и рабочими функциями. Другое расширение — улучшить рассматриваемые свойства ICE. Как правило, это усовершенствование должно включать в себя давление во впускном коллекторе как состояние и тем самым обеспечивать более точное моделирование эффектов турбо-динамики и «ограничителя дыма» на реакцию двигателя и расход топлива [40].Кроме того, потери на трение в гидравлических агрегатах и подсистеме трансмиссии могут влиять на управление в некоторых конфигурациях, и в этом случае их необходимо учитывать в стратегии управления [41].
Разделенная стратегия также автоматически обрабатывает отклонение возмущений, воздействующих на ДВС, что в противном случае обычно выполняется в отдельном контуре управления двигателем [3,15]. Следует отметить, что стратегия управления сама по себе не гарантирует энергоэффективной работы машины. Например, нецелесообразно опорожнять аккумулятор, когда автомобиль стоит на месте, что приводит к увеличению скорости двигателя. В окончательной реализации необходима высокоуровневая стратегия, гарантирующая, что аккумулятор используется с экономией топлива [3].Кроме того, желаемый выходной крутящий момент должен быть смешан с фрикционными тормозами во время торможения транспортного средства [2]. Некоторые расширения являются естественными, чтобы сделать предлагаемую стратегию управления для рассмотрения всей машины. Например, внешние возмущения, Qext и Text, ICE, должны быть расширены, чтобы учитывать рабочие функции с их входными сигналами оператора, исполнительными механизмами и состояниями. Они могут быть реализованы как рабочая гидравлическая система на двигателе (Text, ICE), как в случае с обычным колесным погрузчиком [17], или как вторичная управляемая система, подключенная к гидравлическому контуру (Qext) [6].Дополнительным аспектом для колесных погрузчиков является то, что нагрузка (например, гравийная куча) связывает трансмиссию и рабочие функции во время заполнения ковша [17]. Таким образом, на этом этапе следует ожидать перекрестной связи между Text, v и рабочими функциями. Другое расширение — улучшить рассматриваемые свойства ICE. Как правило, это усовершенствование должно включать в себя давление во впускном коллекторе как состояние и тем самым обеспечивать более точное моделирование эффектов турбо-динамики и «ограничителя дыма» на реакцию двигателя и расход топлива [40].Кроме того, потери на трение в гидравлических агрегатах и подсистеме трансмиссии могут влиять на управление в некоторых конфигурациях, и в этом случае их необходимо учитывать в стратегии управления [41]. В дополнение к этим эффектам, изменяются другие нелинейности, которые изменяются. динамика присутствует в реальной системе. В первую очередь, это насыщение управляющих сигналов, таких как ограниченный крутящий момент двигателя, ограниченное смещение и скорость исполнительного механизма смещения [8]. Ограничение скорости смещения исполнительного механизма из-за ограниченного потока исполнительного механизма [33] приводит к тому, что регуляторы смещения блоков 1 и 2 работают неравномерно для разных величин шага, что наблюдалось как динамические перекрестные связи в экспериментах, проведенных в этой статье. .Другой нелинейный эффект заключается в том, что гидравлическая емкость уменьшается с увеличением давления. При моделировании [8] этот эффект оказался больше, чем в проведенных здесь экспериментах. Однако емкость напрямую связана со стабильностью контура давления (см. Уравнение (17)), и поэтому этот эффект следует учитывать при проектировании регулятора давления. Стратегия независимого управления оказалась полезной для эталонного одиночного контура. -режим ICPS гибридный HMT. Однако следующим логическим шагом будет рассмотрение других конфигураций HMT и многорежимных концепций.Например, конфигурация OCPS (cm = 0, bm 0) содержит перекрестные связи между контурами скорости транспортного средства и давления в системе, что, вероятно, повлияет на управление крутящим моментом [13]. Когда дело доходит до многорежимных концепций, событие переключения режима создает дополнительную проблему управления, которую необходимо обрабатывать. Это касается как комбинации времени сцепления и реакции регулятора рабочего объема [25], так и влияния потерь насоса / двигателя на изменение направления потока мощности в гидравлическом контуре [38].В системах MIMO наличие перекрестных связей может в некоторых случаях приводить к нестабильности [24]. Для эталонного средства, изученного в этой статье, такие тенденции не наблюдались, и стабильный характер базовой стратегии еще раз подтверждает это.
В дополнение к этим эффектам, изменяются другие нелинейности, которые изменяются. динамика присутствует в реальной системе. В первую очередь, это насыщение управляющих сигналов, таких как ограниченный крутящий момент двигателя, ограниченное смещение и скорость исполнительного механизма смещения [8]. Ограничение скорости смещения исполнительного механизма из-за ограниченного потока исполнительного механизма [33] приводит к тому, что регуляторы смещения блоков 1 и 2 работают неравномерно для разных величин шага, что наблюдалось как динамические перекрестные связи в экспериментах, проведенных в этой статье. .Другой нелинейный эффект заключается в том, что гидравлическая емкость уменьшается с увеличением давления. При моделировании [8] этот эффект оказался больше, чем в проведенных здесь экспериментах. Однако емкость напрямую связана со стабильностью контура давления (см. Уравнение (17)), и поэтому этот эффект следует учитывать при проектировании регулятора давления. Стратегия независимого управления оказалась полезной для эталонного одиночного контура. -режим ICPS гибридный HMT. Однако следующим логическим шагом будет рассмотрение других конфигураций HMT и многорежимных концепций.Например, конфигурация OCPS (cm = 0, bm 0) содержит перекрестные связи между контурами скорости транспортного средства и давления в системе, что, вероятно, повлияет на управление крутящим моментом [13]. Когда дело доходит до многорежимных концепций, событие переключения режима создает дополнительную проблему управления, которую необходимо обрабатывать. Это касается как комбинации времени сцепления и реакции регулятора рабочего объема [25], так и влияния потерь насоса / двигателя на изменение направления потока мощности в гидравлическом контуре [38].В системах MIMO наличие перекрестных связей может в некоторых случаях приводить к нестабильности [24]. Для эталонного средства, изученного в этой статье, такие тенденции не наблюдались, и стабильный характер базовой стратегии еще раз подтверждает это. Для других конфигураций трансмиссии и расширенных версий стратегии в соответствии с вышеизложенным может быть мотивировано исследование серьезности перекрестных связей; см., например, [42]. Поскольку учитывалась статическая развязка, в измерениях возникали динамические возмущения.Для приложения, рассматриваемого в этой статье, эти возмущения считались приемлемыми. Однако при необходимости можно рассмотреть возможность динамической развязки, что потребует точных моделей регулятора смещения и турбодинамики. Что касается диагонального регулятора, то в экспериментах использовались пропорциональные элементы. Однако в зависимости от требований к замкнутым контурам можно рассмотреть более сложные контроллеры. Например, установившаяся ошибка, вызванная трением, утечкой и внешними помехами, может быть устранена с помощью интегрирующих элементов.
Для других конфигураций трансмиссии и расширенных версий стратегии в соответствии с вышеизложенным может быть мотивировано исследование серьезности перекрестных связей; см., например, [42]. Поскольку учитывалась статическая развязка, в измерениях возникали динамические возмущения.Для приложения, рассматриваемого в этой статье, эти возмущения считались приемлемыми. Однако при необходимости можно рассмотреть возможность динамической развязки, что потребует точных моделей регулятора смещения и турбодинамики. Что касается диагонального регулятора, то в экспериментах использовались пропорциональные элементы. Однако в зависимости от требований к замкнутым контурам можно рассмотреть более сложные контроллеры. Например, установившаяся ошибка, вызванная трением, утечкой и внешними помехами, может быть устранена с помощью интегрирующих элементов.8. Выводы
В отличие от базового подхода, предложенная стратегия разъединенного управления устраняет перекрестные муфты, присутствующие в сложной гибридной гидромеханической трансмиссии. Таким образом, установившиеся ошибки, вызванные этими перекрестными соединениями, были устранены методом прямой связи, а не с помощью интегрирующих элементов. Эта особенность в сочетании с тем, что она основана на общей модели сложной подсистемы передачи, мотивирует будущее применение стратегии для многорежимных передач.Кроме того, управление крутящим моментом было достигнуто удобным способом, который обычно требуется с точки зрения оператора.
Стратегия может быть расширена для учета дополнительных потребителей энергии машин, таких как рабочие функции, и предназначена в качестве инструмента для реализации стратегий управления на высоком уровне в топливосберегающих тяжелых мобильных рабочих машинах.
 с. (кВт)
с. (кВт)