Тяговая динамичность — Студопедия
Тяговая динамичность характеризует способность автомобиля производительно выполнять транспортные функции. Чем динамичнее автомобиль, тем он способен быстрее разгоняться и двигаться с более высокой скоростью в разнообразных условиях движения. Повышение тяговой динамичности возможно за счет увеличения удельной мощности двигателя и улучшения его приемистости, что достигается уменьшением массы автомобиля, улучшением его обтекаемости, совершенствованием конструкции двигателя, трансмиссии и ходовой части. Автомобиль, обладающий относительно более высокой тяговой динамичностью, в реальных дорожных условиях обладает большим запасом мощности, который может расходоваться на преодоление дорожных сопротивлений и на разгон.
Тяговые свойства (тяговая динамика) автомобиля определяют его способность интенсивно увеличивать скорость движения. От этих свойств во многом зависит уверенность водителя при обгоне, проезде перекрестков. Особенно важное значение тяговая динамика имеет для выхода из аварийных ситуаций, когда тормозить уже поздно, маневрировать не позволяют сложные условия, а избежать ДТП можно, только опередив события.
Так же как и в случае с тормозными силами, сила тяги на колесе не должна быть больше сцепления с дорогой, в противном случае оно начнет пробуксовывать. Предотвращает это противопробуксовочная система (ПБС). При разгоне автомобиля она подтормаживает колесо, скорость вращения которого больше, чем у остальных, а при необходимости уменьшает мощность, развиваемую двигателем.
Следует отметить, что тяговая динамичность автомобиля зависит от его конструктивных параметров и качества дороги.
Из конструктивных факторов наибольшее значение имеют:
o форма скоростной характеристики двигателя,
o КПД трансмиссии,
o передаточные числа трансмиссии,
o масса автомобиля,
o обтекаемость автомобиля.
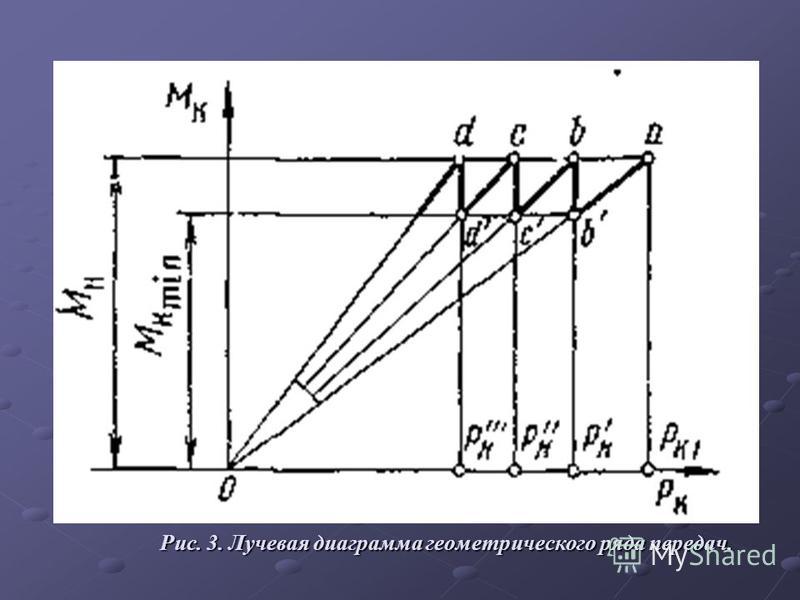
Форма скоростной характеристики. Карбюраторный двигатель имеет более выпуклую характеристику, чем дизель, что обеспечивает ему больший запас мощности при той же скорости. Следовательно, будет больше преодолеваемое сопротивление или развиваемое ускорение.
КПД трансмиссии. КПД трансмиссии оценивает величину непроизводительных потерь энергии. Уменьшение КПД, вызванное ростом потерь энергии на трение, приводит к уменьшению силы тяги на ведущих колесах. В результате снижается максимальная скорость автомобиля и максимальный коэффициент сопротивления дороги.
Применение в холодное время года летних трансмиссионных масел, имеющих большую вязкость, приводит к увеличению крутящегося момента, особенно заметному во время трогания автомобиля с места.
Передаточные числа трансмиссии. От передаточного числа главной передачи в большой степени зависит максимальная скорость автомобиля. От передаточного числа первой передачи зависит величина максимального сопротивления дороги, преодолеваемого при равномерном движении. Передаточные числа промежуточных ступеней подбирают таким образом, чтобы обеспечить максимальную интенсивность разгона.
Увеличение числа передач в коробке улучшает тяговую динамичность автомобиля. Хотя динамические факторы на первой и последних передачах в обоих случаях одинаковы, однако, сравнивая максимальные скорости на различных дорогах, видим преимущества четырехступенчатой коробки. Так, на дороге, характеризуемой коэффициентом сопротивления максимальная скорость автомобиля характеризуемых штриховой кривой, что вызывает ухудшение динамичности и топливной экономичности автомобиля.
Хотя динамические факторы на первой и последних передачах в обоих случаях одинаковы, однако, сравнивая максимальные скорости на различных дорогах, видим преимущества четырехступенчатой коробки. Так, на дороге, характеризуемой коэффициентом сопротивления максимальная скорость автомобиля характеризуемых штриховой кривой, что вызывает ухудшение динамичности и топливной экономичности автомобиля.
Масса автомобиля. Повышение массы автомобиля приводит к увеличению силы инерции и сил сопротивления качению и подъему и, как следствие, к ухудшению динамичности автомобиля.
Обтекаемость автомобиля. Для современных легковых автомобилей характерны строгие прямолинейные очертания с плавными переходами, однако нередко зарубежные фирмы в рекламных целях выпускают автомобили с кузовами вычурной формы, имеющими необычный внешний вид и создающими повышенное сопротивление воздуха.
Для уменьшения сопротивления воздуха ветровое стекло автомобиля располагают наклонно, а выступающие детали устанавливают так, чтобы они не выходили за внешние очертания кузова. У гоночных автомобилей число выступающих частей уменьшают до минимума, а заднюю часть кузова делают вытянутой, добиваясь плавного обтекания ее воздухом.
У гоночных автомобилей число выступающих частей уменьшают до минимума, а заднюю часть кузова делают вытянутой, добиваясь плавного обтекания ее воздухом.
Силу сопротивления воздуха у грузовых автомобилей можно уменьшить, закрыв грузовую платформу брезентом, натянутым между крышей кабины и задним бортом, или используя специальные щитки (обтекатели), уменьшающие завихрения воздуха.
Тема 4.3. Тяговая динамичность автомобиля
Студент должен:
знать:
возможностей движения автомобиля с учетом различных факторов.
Силовой баланс и его график. Мощностной баланс и его график.
Динамический
фактор и динамическая характеристика,
ее использование для определения
основных параметров движения автомобиля.
Динамическая характеристика и номограмма
нагрузок. Динамический паспорт, его
использование для определения динамических
свойств автомобиля с учетом основных
характеристик дорог.
Динамический паспорт, его
использование для определения динамических
свойств автомобиля с учетом основных
характеристик дорог.
Разгон автомобиля и графики ускорений. Время и путь разгона.
Параметры разгона автомобиля. Динамическое преодоление подъемов.
Движение автомобиля накатом.
Влияние конструкционных факторов на тяговую динамичность автомобиля.
Тяговые возможности автопоездов.
Тема 4.4. Тяговые испытания автомобиля
Студент должен:
знать:
цели и задачи испытания автомобиля на динамичность, оборудование и аппаратуру для дорожных испытаний на динамичность.
Цель
испытаний. Виды и методы испытаний.
Аппаратура и стенды для испытания
автомобилей. Определение силы тяги,
скорости, ускорения, замедления,
коэффициента сопротивления качению,
коэффициента сцепления с дорогой.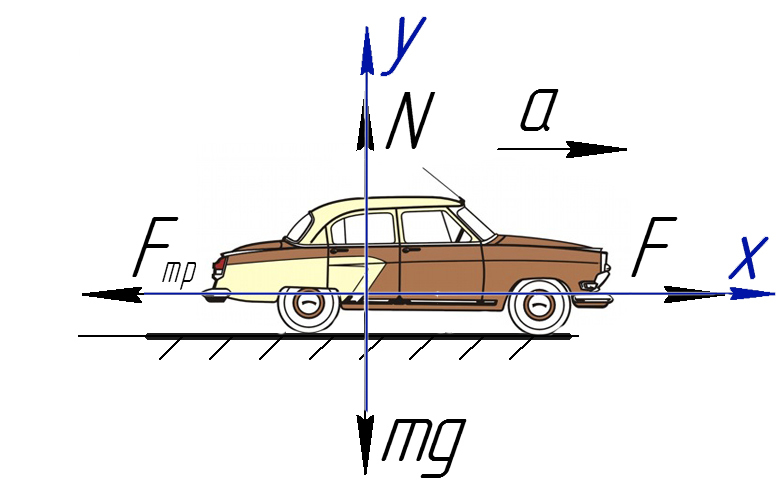 Техника безопасности и безопасность
дорожного движения при испытаниях
автомобиля.
Техника безопасности и безопасность
дорожного движения при испытаниях
автомобиля.
Тема 4.5. Тормозная динамичность автомобиля
Студент должен:
знать:
факторы, влияющие на тормозную динамику автомобиля, способы
торможения, методику и нормативы определения тормозных свойств
автомобиля.
Безопасность движения и тормозной момент. Тормозная сила, схема сил, действующих на автомобиль при торможении, и уравнение движения автомобиля при торможении.
Измерители тормозной динамичности автомобиля (замедление, время торможения, тормозной путь) и их графическое выражение.
Факторы, влияющие на тормозной путь. Показатели интенсивности торможения автомобиля.
Распределение
тормозной силы между мостами автомобиля.
Способы торможения автомобиля.
Нормальные значения тормозного пути и замедления, предусмотренные правилами дорожного движения.
Способы торможения автомобиля и автопоезда. Понятие о дорожно-транспортной экспертизе дорожно-транспортного происшествия.
Определение показателей тормозной динамичности автомобиля; виды дорожных испытаний, аппаратура для испытаний. Нормативы эффективности тормозных систем.
Тема 4.6. Топливная экономичность автомобиля
Студент должен:
знать:
конструктивные и эксплуатационные факторы, влияющие на
топливную экономичность автомобиля и автопоезда.
Значение топливной экономичности автомобиля для народного хозяйства и охраны окружающей среды. Измерители топливной экономичности.
Топливно-экономическая
характеристика автомобиля. Топливная
экономичность автопоезда.
Влияние конструктивных и эксплуатационных факторов на расход топлива.
Понятие о нормах расхода топлива.
Тема 4.7. Устойчивость автомобиля
Студент должен:
знать:
показатели устойчивости автомобиля, факторы, влияющие на устойчивость автомобиля при его движении.
Понятие об устойчивости автомобиля — поперечной, продольной.
Поперечная устойчивость автомобиля и силы, действующие на автомобиль при движении на повороте, на дороге с поперечным уклоном.
Показатели поперечной устойчивости.
Занос автомобиля: условия возможности заноса, занос переднего или заднего мостов.
Влияние конструктивных и эксплуатационных факторов на поперечную устойчивость автомобиля.
Продольная
устойчивость автомобиля.
Методы вождения автомобиля, предотвращающие занос и опрокидывание.
Тяговая динамика автомобиля — Энциклопедия по машиностроению XXL
Как уже отмечалось, эффективность автомобиля в значительной степени определяется его тягово-скоростными свойствами и экономичностью. Для полноприводных автомобилей, эксплуатируемых в плохих дорожных условиях, в межсезонье и по бездорожью, тягово-скоростные свойства являются основными. Рассмотрим общие и специфические вопросы тяговой динамики автомобилей в характерных дорожно-климатических условиях использования. Их анализ позволяет наметить пути соверщенствования конструкции или оценить потенциальные скоростные (и транспортные) возможности автомобилей в конкретных условиях эксплуатации. При этом важно с вероятностных позиций оценить, как влияют те или иные условия использования автомобилей на уровень реализации их тяговых и особенно скоростных свойств.
Уравнения, описывающие движение колесных мащин, хорошо известны [4, 5, 14]. Уточним их применительно к специфике полноприводного автомобиля и покажем, как использовать уравнения движения для исследования тяговой динамики автомобиля в различных условиях и режимах его работы. Для этого рассмотрим процесс движения автомобиля с прицепом в общем случае. [c.141]
Из уравнения (27) следует, что вид уравнения тяговой динамики автомобиля не зависит от его типа так же, как и от типа движителя, поскольку в уравнение входят параметры силовой установки, внешние и внутренние сопротивления. Тип автомобиля и движителя отражается лишь на количественных показателях входящих в уравнение (27) величин. [c.147]
Влияние неустановившегося режима работы двигателя на тяговую динамику автомобиля
[c. 82]
82]
В разделе тяговой динамики автомобиля рассматривались его тяговые свойства при полном открытии дроссельной заслонки (полной подаче топлива для дизеля), для оценки же топливной экономичности автомобиля большое значение имеют рас- [c.101]
ТЯГОВАЯ ДИНАМИКА АВТОМОБИЛЯ [c.116]
В том же году Евгении Алексеевич книгой Тяговый расчет автомобиля начинает издание ряда учебников по курсу Теория автомобиля . Если в указанной книге содержались сведения только по динамике автомобиля, то в вышедшем в 1935 г. учебнике Теория автомобиля уже были систематически изложены материалы по топливной экономичности и некоторые сведения по устойчивости автомобиля. В 1940 и 1950 гг. этот учебник дважды переиздавался, причем каждый раз Евгений Алексеевич вносил в него существенные изменения и дополнения. [c.243]
Полученное уравнение является уравнением полного баланса сил или уравнением тяговой динамики в отличие от уравнения (19) баланса внешних сил. Необходимо отметить, что величина р определяется как частное от деления мощности на теоретическую скорость без учета скольжения. Расчет величины Ро через действительную скорость V неверен, что приводит при значительном буксовании автомобиля к абсурдным результатам.
[c.147]
Необходимо отметить, что величина р определяется как частное от деления мощности на теоретическую скорость без учета скольжения. Расчет величины Ро через действительную скорость V неверен, что приводит при значительном буксовании автомобиля к абсурдным результатам.
[c.147]
Для построения тяговой характеристики используют уравнение (27), из которого исключают члены, не оказывающие заметного влияния на динамику автомобиля-тягача [c.150]
Для анализа тормозной динамики автомобиля рассмотрим силовой и энергетический баланс при торможении, как это было сделано при анализе тяговой динамики. [c.243]
ТЯГОВАЯ ДИНАМИКА И ТЯГОВЫЙ РАСЧЕТ АВТОМОБИЛЯ 26. Тяговый баланс автомобиля [c.73]
Динамичность автомобиля зависит от его тяговых и тормозных свойств. Поэтому ее изучают в двух разделах, один из которых посвящен тяговой, а другой — тормозной динамике автомобиля.
 [c.3]
[c.3]Уравнение движения автомобиля является основным в тяговой динамике. Оно связывает силы, движущие автомобиль, с силами сопротивления движению и позволяет определить характер движения автомобиля в каждый момент времени. При изучении динамичности автомобиля считают, что его возможности ограничены лишь мощностью двигателя и сцеплением ведущих колес с дорогой. Остальные ограничения, накладываемые, например, требованиями безопасности движения или комфортабельности, не учитывают. [c.108]
Для разработки новых моделей магистральных большегрузных автомобилей и автопоездов необходимы более совершенные методы расчетных, стендовых и дорожных исследований, конкретизация ряда теоретических вопросов как общей компоновки и плавности хода, управляемости и устойчивости, надежности и долговечности, тяговой динамики и технико-экономической целесообразности конструкций, так и основных узлов. [c.3]
Из анализа графиков рис. 34, а и б следует, что как в отношении тяговой динамики и расхода топлива, так и в отношении плавности хода желательно иметь малые значения жесткости шин. Для коэффициента амортизации шин нельзя дать такую однозначную рекомендацию, так как ответ зависит от того, какому показателю автомобиля отдается предпочтение — уменьшению расхода топлива или улучшению плавности хода, и любое решение будет в этом случае компромиссным.
[c.110]
Для коэффициента амортизации шин нельзя дать такую однозначную рекомендацию, так как ответ зависит от того, какому показателю автомобиля отдается предпочтение — уменьшению расхода топлива или улучшению плавности хода, и любое решение будет в этом случае компромиссным.
[c.110]
Тяговые свойства Г. а. оцениваются максимальной величиной динамич. фактора (см. Динамика автомобиля) на прямой передаче и скоростью движения автомобиля, соответствующей максимальным обо- [c.69]
Тяговые качества (динамика) определяют в конечном итоге среднюю в заданных дорожных условиях скорость движения автомобиля, которая зависит от максимальной скорости автомобиля, его способности преодолевать повышенные сопротивления (подъёмы) и приёмистости (способности к быстрому разгону). [c.1]
У автомобилей-тягачей особое значение имеет возможность создания и р.еализации максимального усилия Р р на крюке или усилия на рабочих органах. Для таких автомобилей тягово-ско-ростная характеристика не несет нужной информативности. Поэтому уравнения тяговой динамики представляют в виде графика тяговой характеристики зависимости реализуемой мощности и Л кр, скоростей V и ио, коэффициента а буксования и других параметров от усилия на крюке (рис. 52).
[c.149]
Поэтому уравнения тяговой динамики представляют в виде графика тяговой характеристики зависимости реализуемой мощности и Л кр, скоростей V и ио, коэффициента а буксования и других параметров от усилия на крюке (рис. 52).
[c.149]
Скоростные свойства полноприводных автомобилей зависят от многих факторов, которые в общем случае можно объединить в две группы конструктивные факторы и эксплуатационно-технические. Конструктивные факторы непосредственно влияют на скоростные свойства автомобля. Они выражаются в виде таких частных эксплуатационно-технических свойств, как тяговая динамика, тормозные свойства, устойчивость, управляемость, плавность [c.154]
Основоположником советской автомобильной школы является Е. А. Чудаков, которому принадлежат более двухсот работ по различным отраслям автомобильной науки. Г. В. Зимелев исследовал тяговую динамичность автомобиля и предложил аналитический метод расчета ее показателей. Я. М. Певзнер, А. С. Литвинов и Я. Е. Фаробин разработали теорию движения автомобиля на повороте. Б области тормозной динамики успешно работают И. А. Бухарин и А. Б. Гредескул, а вопросы плавности хода обобщены в трудах Р. В. Ротенберга. Н. А. Яковлевым и Я. X. Закиным проделана большая работа по исследованию эксплуатационных свойств автомобильного поезда.
[c.6]
Е. Фаробин разработали теорию движения автомобиля на повороте. Б области тормозной динамики успешно работают И. А. Бухарин и А. Б. Гредескул, а вопросы плавности хода обобщены в трудах Р. В. Ротенберга. Н. А. Яковлевым и Я. X. Закиным проделана большая работа по исследованию эксплуатационных свойств автомобильного поезда.
[c.6]
Наиболее полное суждение о тяговых качествах автомобиля получается на основе сравнения динамической характеристики данного автомобиля (см. Динамика автомобиля) с сопротивлением тех дорог, по к-рым должно работать проектируемое автомобильное хозяйство. Научно-тех-нич. советом НКПС были установлены в отношении тяговых качеств определенные требования для автомобилей, принятые за нормальные для эксплоатации в СССР. Ниже приведено постановление Научно-технич. совета НКПС по этому вопросу (1929 г.). [c.331]
ГЛАВА 2 ТЯГОВАЯ ДИНАМИКА И ТОПЛИВНАЯ экономичнрсть ТРАКТОРОВ И АВТОМОБИЛЕЙ [c.416]
Определения эксплуатационных свойств автомобиля | Теория
Тяговые свойства автомобиля — совокупность свойств, определяющих возможные по характеристикам двигателя или сцепления ведущих колес с дорогой, диапазоны изменения скоростей движения и предельные интенсивности разгона автомобиля при его работе на тяговом режиме в различных дорожных условиях.
Тяговым режимом считается режим работы двигателя, при котором от двигателя к ведущим колесам подводится мощность, достаточная для преодоления сопротивления движению.
Чем тяжелее дорожные условия, тем меньше диапазон возможных скоростей и меньше возможность ускорения. В некоторых условиях, называемых предельными, диапазон скоростей снижается до одного значения. При более тяжелых условиях движение невозможно.
Динамичность — свойство автомобиля перевозить грузы и пассажиров с максимально возможной средней скоростью. Чем выше динамичность автомобиля, тем больше его производительность. Динамичность автомобиля во многом зависит от его тяговых и тормозных свойств.
Топливная экономичность — свойство автомобиля рационально использовать энергию топлива при выполнении единицы транспортной работы.
Снижение расходов топлива транспортными средствами является важнейшей задачей. От того, насколько экономичен автомобиль, зависит себестоимость автоперевозок.
Управляемость — способность автомобиля сохранять заданное направление движения или изменять его при воздействии водителя на рулевое управление автомобиля.
Управляемость заивисит от конструкции автомобиля, технического состояния рулевого управления, подвески и шин, а также условий окружающей среды.
Устойчивость — свойство автомобиля сохранять направление движения и противодействовать силам, стремящимся увести в сторону или опрокинуть автомобиль.
Управляемость и устойчивость тесно связаны друг с другом.
Устойчивость вместе с управляемостью и тормозной динамичностью автомобиля обусловливают безопасность движения.
Проходимость — свойство автомобиля свободно двигаться по плохим (разбитым, размокшим) дорогам и пересеченной местности, преодолевая естественные и искусственные препятствия (канавы, рвы, пороги) без вспомогательных устройств и посторонней помощи.
Проходимость является одним из основных эксплуатационных свойств, определяющих эффективность использования данного транспортного средства. Этим качеством должны обладать автомобили всех типов, но в зависимости от их назначения — в различной степени.
Этим качеством должны обладать автомобили всех типов, но в зависимости от их назначения — в различной степени.
Автомобили обычной проходимости предназначены для движения по шоссейным и грунтовым дорогам. К ним относятся автомобили обшетранспортного назначения колесной формулой 4×2 или 6×4 с обычными тороидными или низкопрофильными шинами и не блокируемыми дифференциалами.
К автомобилям повышенной проходимости относятся автомобили колесной формулой 4×4, 6×4, 6×6 и т. д. с широкопрофильными шинами, шинами регулируемого давления воздуха, с частично или полностью блокируемыми дифференциалами.
К автомобилям высокой проходимости относятся полноприводные автомобили с шинами сверхнизкого давления, арочными шинами или пневмокатками Эти автомобили могут быть плавающими и работать в особо тяжелых климатических условиях, например на севере.
Плавность хода — свойство автомобиля двигаться по дорогам и местности с заданными скоростями без толчков и колебаний кузова, которые могут нарушить нормальную работу механизмов автомобиля, оказывать вредное влияние на водителя и пассажиров.
Выступы и впадины от 100 м до 10 см называют микропрофилем дороги, который является основной причиной колебаний автомобиля на подвеске.
Мелкие неровности дорожной поверхности менее 10 см называются шероховатостью. Они могут создать высокочастотные вибрации отдельных элементов шасси и кузова автомобиля и высокий уровень шума как внутри кузова, так и вокруг машины.
Надежность — свойство автомобиля безотказно перевозить грузы и пассажиров в течение определенного срока и без ухудшения основных эксплуатационных показателей автотранспортного средства.
Надежность — это совокупность свойств, которая может включать в себя безотказность, долговечность и ремонтопригодность объекта.
Безотказность — свойство автомобиля (двигателя) сохранять работоспособность в течение определенного интервала времени или пробега определенной величины.
Долговечность — свойство автомобиля сохранять работоспособность до определенного времени, когда установлено проведение технического обслуживания и ремонта автотранспортного средства.
Ремонтопригодность — приспособленность автомобиля к предупреждению, обнаружению и устранению неисправностей и отказов.
Тяговые испытания, тяговая и тормозная динамичность
1. Презентация на тему «Тяговые испытания, тяговая и тормозная динамичность»
Выполнил студент группы 17 ТОРЛогунов Глеб
Проверил преподаватель:
Рысев А.А
2. Тормозной путь
Это расстояниепроходимое
автомобилем с
момента
действия
тормозной
системы в
полную силу до
остановки
автомобиля
Возможность предотвращения ДТП
чаще всего связана с интенсивным
торможением, поэтому необходимо,
чтобы тормозные свойства автомобиля
обеспечивали его эффективное
замедление в любых дорожных
ситуациях.
4. Тормозная динамичность
тормозная динамичность — этоспособность автомобиля к экстренной
остановке в случае внезапного
появления препятствия на пути
движения.

Для выполнения этого условия сила, развиваемая
тормозным механизмом, не должна превышать силы
сцепления с дорогой, зависящей от весовой нагрузки
на колесо и состояния дорожного покрытия. Иначе
колесо заблокируется (перестанет вращаться) и
начнет скользить, что может привести (особенно при
блокировке нескольких колес) к заносу автомобиля и
значительному увеличению тормозного пути.
Чтобы предотвратить блокировку, силы, развиваемые
тормозными механизмами, должны быть
пропорциональны весовой нагрузке на колесо.
Реализуется это с помощью применения на передней
оси более эффективных дисковых тормозов, а на
задней – барабанных, причем с ограничителем
тормозных сил.
На современных автомобилях используется
антиблокировочная система тормозов (АБС),
корректирующая силу торможения каждого колеса и
предотвращающая их скольжение.
Зимой и летом состояние дорожного покрытия разное, поэтому
для наилучшей реализации тормозных свойств необходимо
применять шины, соответствующие сезону.

Если рассмотреть такой автомобиль, как Toyota Auris то он
оборудован полным набором средств активной безопасности,
помогающих предотвратить неприятности на дороге. Для этого
существуют интеллектуальные системы, помогающие водителю
контролировать автомобиль в сложных дорожных условиях.
Все комплектации Тойота Аурис включают в себя усилитель
экстренного торможения (BA) и антиблокировочную систему
(ABS) с электронной системой распределения тормозного усилия
(EBD). ABS предотвращает блокировку колес в случае
пробуксовки, система EBD оптимизирует распределение
тормозного усилия между задними и передними, правыми и
левыми колесами, что позволяет своевременно выравнивать
траекторию движения машины. Усилитель экстренного
торможения (BA) повышает давление в тормозной системе в
случае резкого, но недостаточно сильного нажатия на педаль
тормоза водителем при экстренном торможении.
7. Тяговая динамичность
Тяговая динамичность характеризует способность автомобиляпроизводительно выполнять транспортные функции.
 Чем
Чемдинамичнее автомобиль, тем он способен быстрее разгоняться и
двигаться с более высокой скоростью в разнообразных условиях
движения. Повышение тяговой динамичности возможно за счет
увеличения удельной мощности двигателя и улучшения его
приемистости, что достигается уменьшением массы автомобиля,
улучшением его обтекаемости, совершенствованием
конструкции двигателя, трансмиссии и ходовой части.
Автомобиль, обладающий относительно более высокой тяговой
динамичностью, в реальных дорожных условиях обладает
большим запасом мощности, который может расходоваться на
преодоление дорожных сопротивлений и на разгон.
Тяговые свойства (тяговая динамика) автомобиля
определяют его способность интенсивно увеличивать
скорость движения. От этих свойств во многом
зависит уверенность водителя при обгоне, проезде
перекрестков. Особенно важное значение тяговая
динамика имеет для выхода из аварийных ситуаций,
когда тормозить уже поздно, маневрировать не
позволяют сложные условия, а избежать ДТП можно,
только опередив события.

Так же как и в случае с тормозными силами, сила
тяги на колесе не должна быть больше сцепления с
дорогой, в противном случае оно начнет
пробуксовывать. Предотвращает это
противопробуксовочная система (ПБС). При разгоне
автомобиля она подтормаживает колесо, скорость
вращения которого больше, чем у остальных, а при
необходимости уменьшает мощность, развиваемую
двигателем.
Следует отметить, что
тяговая динамичность
автомобиля зависит от его
конструктивных
параметров и качества
дороги.
Из конструктивных
факторов наибольшее
значение имеют:
форма скоростной
характеристики двигателя,
КПД трансмиссии,
передаточные числа
трансмиссии,
масса автомобиля,
обтекаемость автомобиля.
Форма скоростной характеристики. Карбюраторный двигатель имеет
более выпуклую характеристику, чем дизель, что обеспечивает ему
больший запас мощности при той же скорости. Следовательно, будет
больше преодолеваемое сопротивление или развиваемое ускорение.

КПД трансмиссии. КПД трансмиссии оценивает величину
непроизводительных потерь энергии. Уменьшение КПД, вызванное
ростом потерь энергии на трение, приводит к уменьшению силы тяги на
ведущих колесах. В результате снижается максимальная скорость
автомобиля и максимальный коэффициент сопротивления дороги.
Применение в холодное время года летних трансмиссионных масел,
имеющих большую вязкость, приводит к увеличению крутящегося
момента, особенно заметному во время трогания автомобиля с места.
Передаточные числа трансмиссии. От передаточного числа главной
передачи в большой степени зависит максимальная скорость
автомобиля. От передаточного числа первой передачи зависит величина
максимального сопротивления дороги, преодолеваемого при
равномерном движении. Передаточные числа промежуточных ступеней
подбирают таким образом, чтобы обеспечить максимальную
интенсивность разгона.
Увеличение числа передач в коробке улучшает тяговую
динамичность автомобиля.
 Хотя динамические факторы на
Хотя динамические факторы напервой и последних передачах в обоих случаях одинаковы,
однако, сравнивая максимальные скорости на различных
дорогах, видим преимущества четырехступенчатой коробки.
Так, на дороге, характеризуемой коэффициентом
сопротивления максимальная скорость автомобиля
характеризуемых штриховой кривой, что вызывает ухудшение
динамичности и топливной экономичности автомобиля.
Масса автомобиля. Повышение массы автомобиля приводит к
увеличению силы инерции и сил сопротивления качению и
подъему и, как следствие, к ухудшению динамичности
автомобиля.
Обтекаемость автомобиля. Для современных легковых
автомобилей характерны строгие прямолинейные
очертания с плавными переходами, однако нередко
зарубежные фирмы в рекламных целях выпускают
автомобили с кузовами вычурной формы, имеющими
необычный внешний вид и создающими повышенное
сопротивление воздуха.
Для уменьшения сопротивления воздуха ветровое
стекло автомобиля располагают наклонно, а
выступающие детали устанавливают так, чтобы они не
выходили за внешние очертания кузова.
 У гоночных
У гоночныхавтомобилей число выступающих частей уменьшают
до минимума, а заднюю часть кузова делают
вытянутой, добиваясь плавного обтекания ее
воздухом.
Силу сопротивления воздуха у грузовых автомобилей
можно уменьшить, закрыв грузовую платформу
брезентом, натянутым между крышей кабины и задним
бортом, или используя специальные щитки
(обтекатели), уменьшающие завихрения воздуха.
Презентация на тему: Презентация на тему « Тяговые испытания, тяговая и тормозная динамичность »
1
Первый слайд презентации: Презентация на тему « Тяговые испытания, тяговая и тормозная динамичность »
Выполнил студент группы 17 ТОР Логунов Глеб Проверил преподаватель: Рысев А.А
Изображение слайда
2
Слайд 2: Тормозной путь
Это расстояние проходимое автомобилем с момента действия тормозной системы в полную силу до остановки автомобиля
Изображение слайда
3
Слайд 3
Возможность предотвращения ДТП чаще всего связана с интенсивным торможением, поэтому необходимо, чтобы тормозные свойства автомобиля обеспечивали его эффективное замедление в любых дорожных ситуациях.
Изображение слайда
4
Слайд 4: Тормозная динамичность
тормозная динамичность — это способность автомобиля к экстренной остановке в случае внезапного появления препятствия на пути движения.
Изображение слайда
5
Слайд 5
Для выполнения этого условия сила, развиваемая тормозным механизмом, не должна превышать силы сцепления с дорогой, зависящей от весовой нагрузки на колесо и состояния дорожного покрытия. Иначе колесо заблокируется (перестанет вращаться) и начнет скользить, что может привести (особенно при блокировке нескольких колес) к заносу автомобиля и значительному увеличению тормозного пути.
Чтобы предотвратить блокировку, силы, развиваемые тормозными механизмами, должны быть пропорциональны весовой нагрузке на колесо. Реализуется это с помощью применения на передней оси более эффективных дисковых тормозов, а на задней – барабанных, причем с ограничителем тормозных сил.
На современных автомобилях используется антиблокировочная система тормозов (АБС), корректирующая силу торможения каждого колеса и предотвращающая их скольжение.
Иначе колесо заблокируется (перестанет вращаться) и начнет скользить, что может привести (особенно при блокировке нескольких колес) к заносу автомобиля и значительному увеличению тормозного пути.
Чтобы предотвратить блокировку, силы, развиваемые тормозными механизмами, должны быть пропорциональны весовой нагрузке на колесо. Реализуется это с помощью применения на передней оси более эффективных дисковых тормозов, а на задней – барабанных, причем с ограничителем тормозных сил.
На современных автомобилях используется антиблокировочная система тормозов (АБС), корректирующая силу торможения каждого колеса и предотвращающая их скольжение.
Изображение слайда
6
Слайд 6
Зимой и летом состояние дорожного покрытия разное, поэтому для наилучшей реализации тормозных свойств необходимо применять шины, соответствующие сезону. Если рассмотреть такой автомобиль, как Toyota Auris то он оборудован полным набором средств активной безопасности, помогающих предотвратить неприятности на дороге. Для этого существуют интеллектуальные системы, помогающие водителю контролировать автомобиль в сложных дорожных условиях.
Все комплектации Тойота Аурис включают в себя усилитель экстренного торможения (BA) и антиблокировочную систему (ABS) с электронной системой распределения тормозного усилия (EBD). ABS предотвращает блокировку колес в случае пробуксовки, система EBD оптимизирует распределение тормозного усилия между задними и передними, правыми и левыми колесами, что позволяет своевременно выравнивать траекторию движения машины. Усилитель экстренного торможения (BA) повышает давление в тормозной системе в случае резкого, но недостаточно сильного нажатия на педаль тормоза водителем при экстренном торможении.
Если рассмотреть такой автомобиль, как Toyota Auris то он оборудован полным набором средств активной безопасности, помогающих предотвратить неприятности на дороге. Для этого существуют интеллектуальные системы, помогающие водителю контролировать автомобиль в сложных дорожных условиях.
Все комплектации Тойота Аурис включают в себя усилитель экстренного торможения (BA) и антиблокировочную систему (ABS) с электронной системой распределения тормозного усилия (EBD). ABS предотвращает блокировку колес в случае пробуксовки, система EBD оптимизирует распределение тормозного усилия между задними и передними, правыми и левыми колесами, что позволяет своевременно выравнивать траекторию движения машины. Усилитель экстренного торможения (BA) повышает давление в тормозной системе в случае резкого, но недостаточно сильного нажатия на педаль тормоза водителем при экстренном торможении.
Изображение слайда
7
Слайд 7: Тяговая динамичность
Тяговая динамичность характеризует способность автомобиля производительно выполнять транспортные функции. Чем динамичнее автомобиль, тем он способен быстрее разгоняться и двигаться с более высокой скоростью в разнообразных условиях движения. Повышение тяговой динамичности возможно за счет увеличения удельной мощности двигателя и улучшения его приемистости, что достигается уменьшением массы автомобиля, улучшением его обтекаемости, совершенствованием конструкции двигателя, трансмиссии и ходовой части. Автомобиль, обладающий относительно более высокой тяговой динамичностью, в реальных дорожных условиях обладает большим запасом мощности, который может расходоваться на преодоление дорожных сопротивлений и на разгон.
Чем динамичнее автомобиль, тем он способен быстрее разгоняться и двигаться с более высокой скоростью в разнообразных условиях движения. Повышение тяговой динамичности возможно за счет увеличения удельной мощности двигателя и улучшения его приемистости, что достигается уменьшением массы автомобиля, улучшением его обтекаемости, совершенствованием конструкции двигателя, трансмиссии и ходовой части. Автомобиль, обладающий относительно более высокой тяговой динамичностью, в реальных дорожных условиях обладает большим запасом мощности, который может расходоваться на преодоление дорожных сопротивлений и на разгон.
Изображение слайда
8
Слайд 8
Тяговые свойства (тяговая динамика) автомобиля определяют его способность интенсивно увеличивать скорость движения.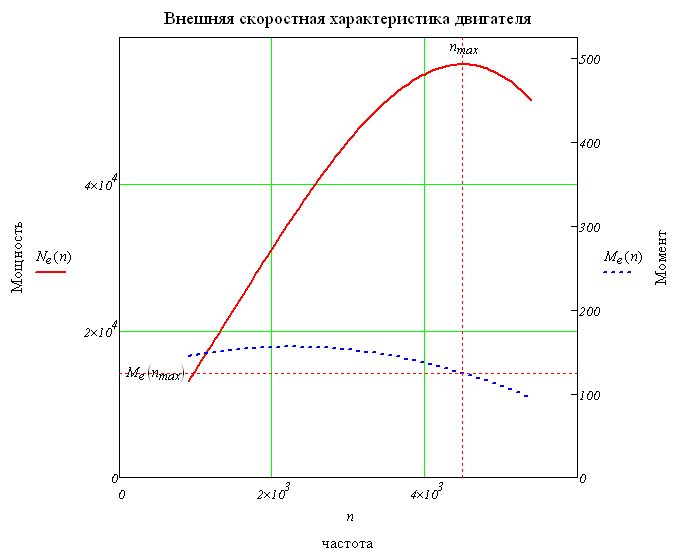 От этих свойств во многом зависит уверенность водителя при обгоне, проезде перекрестков. Особенно важное значение тяговая динамика имеет для выхода из аварийных ситуаций, когда тормозить уже поздно, маневрировать не позволяют сложные условия, а избежать ДТП можно, только опередив события.
Так же как и в случае с тормозными силами, сила тяги на колесе не должна быть больше сцепления с дорогой, в противном случае оно начнет пробуксовывать. Предотвращает это противопробуксовочная система (ПБС). При разгоне автомобиля она подтормаживает колесо, скорость вращения которого больше, чем у остальных, а при необходимости уменьшает мощность, развиваемую двигателем.
От этих свойств во многом зависит уверенность водителя при обгоне, проезде перекрестков. Особенно важное значение тяговая динамика имеет для выхода из аварийных ситуаций, когда тормозить уже поздно, маневрировать не позволяют сложные условия, а избежать ДТП можно, только опередив события.
Так же как и в случае с тормозными силами, сила тяги на колесе не должна быть больше сцепления с дорогой, в противном случае оно начнет пробуксовывать. Предотвращает это противопробуксовочная система (ПБС). При разгоне автомобиля она подтормаживает колесо, скорость вращения которого больше, чем у остальных, а при необходимости уменьшает мощность, развиваемую двигателем.
Изображение слайда
9
Слайд 9
Следует отметить, что тяговая динамичность автомобиля зависит от его конструктивных параметров и качества дороги. Из конструктивных факторов наибольшее значение имеют:
форма скоростной характеристики двигателя,
КПД трансмиссии,
передаточные числа трансмиссии,
масса автомобиля,
обтекаемость автомобиля.
Из конструктивных факторов наибольшее значение имеют:
форма скоростной характеристики двигателя,
КПД трансмиссии,
передаточные числа трансмиссии,
масса автомобиля,
обтекаемость автомобиля.
Изображение слайда
10
Слайд 10
Форма скоростной характеристики. Карбюраторный двигатель имеет более выпуклую характеристику, чем дизель, что обеспечивает ему больший запас мощности при той же скорости. Следовательно, будет больше преодолеваемое сопротивление или развиваемое ускорение.
КПД трансмиссии. КПД трансмиссии оценивает величину непроизводительных потерь энергии. Уменьшение КПД, вызванное ростом потерь энергии на трение, приводит к уменьшению силы тяги на ведущих колесах. В результате снижается максимальная скорость автомобиля и максимальный коэффициент сопротивления дороги.
Применение в холодное время года летних трансмиссионных масел, имеющих большую вязкость, приводит к увеличению крутящегося момента, особенно заметному во время трогания автомобиля с места.
Передаточные числа трансмиссии. От передаточного числа главной передачи в большой степени зависит максимальная скорость автомобиля. От передаточного числа первой передачи зависит величина максимального сопротивления дороги, преодолеваемого при равномерном движении. Передаточные числа промежуточных ступеней подбирают таким образом, чтобы обеспечить максимальную интенсивность разгона.
В результате снижается максимальная скорость автомобиля и максимальный коэффициент сопротивления дороги.
Применение в холодное время года летних трансмиссионных масел, имеющих большую вязкость, приводит к увеличению крутящегося момента, особенно заметному во время трогания автомобиля с места.
Передаточные числа трансмиссии. От передаточного числа главной передачи в большой степени зависит максимальная скорость автомобиля. От передаточного числа первой передачи зависит величина максимального сопротивления дороги, преодолеваемого при равномерном движении. Передаточные числа промежуточных ступеней подбирают таким образом, чтобы обеспечить максимальную интенсивность разгона.
Изображение слайда
11
Слайд 11
Увеличение числа передач в коробке улучшает тяговую динамичность автомобиля. Хотя динамические факторы на первой и последних передачах в обоих случаях одинаковы, однако, сравнивая максимальные скорости на различных дорогах, видим преимущества четырехступенчатой коробки. Так, на дороге, характеризуемой коэффициентом сопротивления максимальная скорость автомобиля характеризуемых штриховой кривой, что вызывает ухудшение динамичности и топливной экономичности автомобиля.
Масса автомобиля. Повышение массы автомобиля приводит к увеличению силы инерции и сил сопротивления качению и подъему и, как следствие, к ухудшению динамичности автомобиля.
Хотя динамические факторы на первой и последних передачах в обоих случаях одинаковы, однако, сравнивая максимальные скорости на различных дорогах, видим преимущества четырехступенчатой коробки. Так, на дороге, характеризуемой коэффициентом сопротивления максимальная скорость автомобиля характеризуемых штриховой кривой, что вызывает ухудшение динамичности и топливной экономичности автомобиля.
Масса автомобиля. Повышение массы автомобиля приводит к увеличению силы инерции и сил сопротивления качению и подъему и, как следствие, к ухудшению динамичности автомобиля.
Изображение слайда
12
Последний слайд презентации: Презентация на тему « Тяговые испытания, тяговая и тормозная динамичность »
Обтекаемость автомобиля. Для современных легковых автомобилей характерны строгие прямолинейные очертания с плавными переходами, однако нередко зарубежные фирмы в рекламных целях выпускают автомобили с кузовами вычурной формы, имеющими необычный внешний вид и создающими повышенное сопротивление воздуха.
Для уменьшения сопротивления воздуха ветровое стекло автомобиля располагают наклонно, а выступающие детали устанавливают так, чтобы они не выходили за внешние очертания кузова. У гоночных автомобилей число выступающих частей уменьшают до минимума, а заднюю часть кузова делают вытянутой, добиваясь плавного обтекания ее воздухом.
Силу сопротивления воздуха у грузовых автомобилей можно уменьшить, закрыв грузовую платформу брезентом, натянутым между крышей кабины и задним бортом, или используя специальные щитки (обтекатели), уменьшающие завихрения воздуха.
Для современных легковых автомобилей характерны строгие прямолинейные очертания с плавными переходами, однако нередко зарубежные фирмы в рекламных целях выпускают автомобили с кузовами вычурной формы, имеющими необычный внешний вид и создающими повышенное сопротивление воздуха.
Для уменьшения сопротивления воздуха ветровое стекло автомобиля располагают наклонно, а выступающие детали устанавливают так, чтобы они не выходили за внешние очертания кузова. У гоночных автомобилей число выступающих частей уменьшают до минимума, а заднюю часть кузова делают вытянутой, добиваясь плавного обтекания ее воздухом.
Силу сопротивления воздуха у грузовых автомобилей можно уменьшить, закрыв грузовую платформу брезентом, натянутым между крышей кабины и задним бортом, или используя специальные щитки (обтекатели), уменьшающие завихрения воздуха.
Изображение слайда
Динамичность — автомобиль — Большая Энциклопедия Нефти и Газа, статья, страница 1
Динамичность — автомобиль
Cтраница 1
Динамичность автомобиля зависит прежде всего от его тяговых и тормозных свойств. [1]
[1]
Динамичность автомобиля характеризуется также и его тормозными свойствами. [2]
Динамичность автомобиля зависит от условий эксплуатации, для которых он предназначается. Высокая максимальная скорость движения имеет наибольшее значение для автомобилей, работающих с большими пробегами по хорошим дорогам. В этих условиях величина динамического фактора на прямой передаче может быть сравнительно небольшой. [4]
Динамичность автомобиля зависит от его тяговых и тормозных свойств. Поэтому ее изучают в двух разделах, один из которых посвящен тяговой, а другой — тормозной динамике автомобиля. [5]
Для исследования динамичности автомобиля разгон его можно производить также на каждой из передач, изменяя скорость автомобиля от минимально устойчивой до максимально возможной. Минимальное значение скорости k min соответствует наименьшей устойчивой угловой скорости коленчатого вала cumin при полной нагрузке двигателя. В интервале от 0 до ут [ П автомобиль трогается с места при пробуксовывании сцепления и постепенном открытии дроссельной заслонки.
[7]
Минимальное значение скорости k min соответствует наименьшей устойчивой угловой скорости коленчатого вала cumin при полной нагрузке двигателя. В интервале от 0 до ут [ П автомобиль трогается с места при пробуксовывании сцепления и постепенном открытии дроссельной заслонки.
[7]
Динамической характеристикой определяется динамичность автомобиля лишь на дорогах с усовершенствованным покрытием, не перегруженных транспортом. На неровных дорогах решающую роль приобретает качество подвески, а на дорогах с интенсивным движением — маневренность и приемистость автомобиля. ГАЗ-51, М-20 Победа, ЗИМ, ЗИС-ПО позволяет им двигаться с высокими скоростями по дорогам с неровностями, на покрытии. [8]
Наиболее удобным измерителем динамичности автомобиля является отношение избыточной силы тяги к весу автомобиля. [10]
В практике для оценки динамичности автомобиля при накате широко используют длину пути выбега, которая является простым и наглядным показателем, позволяющим оценивать также и техническое состояние шасси автомобиля.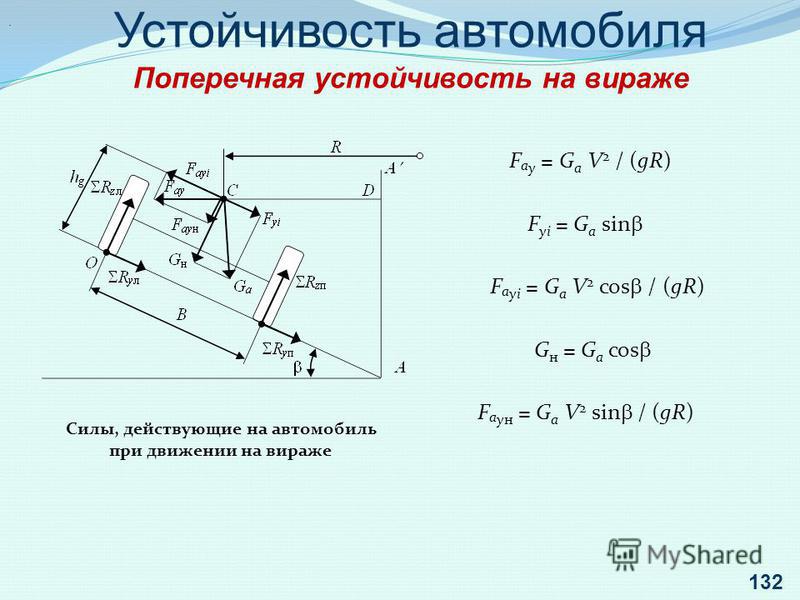 [12]
[12]
Эти же факторы одновременно с потерей динамичности автомобиля приводят и к увеличению расход ч топлива. Поэтому при ухудшении динамичности и увеличении расхода топлива надо, прежде вс: о, проверять величину пути торможения автомобиля по инерции ( выбега), как это указано в разделе Эксплуатационные данные автомобиля гл. [13]
Температура выкипания 50 % топлива характеризует продолжительность прогрева двигателя после его пуска и динамичность автомобиля. [15]
Страницы: 1 2
(PDF) Нелинейная динамика тяги транспортного средства
Б.Дж. ОЛ СО Н Е Т АЛ. 10
Траектории, начатые с начальными условиями в L (обозначены заштрихованными областями на рисунке 5), быстро стремятся к блокировке
при s = 1, затем перемещаются по WL
b и монотонно приближаются к точке (0,1) в соответствии с уравнению (16). Эта ситуация
Эта ситуация
соответствует торможению в условиях блокировки, что для характеристик мокрого и сухого асфальта всегда
неоптимально с точки зрения замедления, поскольку µ (s = 1) = µL <µ (sp).Область притяжения s +, то есть набор
начальных условий, при которых траектория достигает устойчивого инвариантного многообразия WL
b, задается выражением
S = {(u, s) | u> 0, s ∈I \ L}.
Траектории, начатые с начальными условиями в S, быстро сходятся к устойчивому инвариантному многообразию и развиваются
по существу вдоль W +
b, согласно уравнению (16), к точке (u, s) = (0, s +), где автомобиль остановился.
Скорость, с которой транспортное средство замедляется при устойчивом пробуксовке, зависит только от µ (s ∗), то есть от конкретной характеристики трения
и значения s ∗.Наконец, траектории, начатые на неустойчивом инвариантном многообразии, остаются на полосе W−
, монотонно эволюционируют к точке (0, s−). Эта ситуация, однако, физически недостижима, поскольку любое небольшое возмущение
Эта ситуация, однако, физически недостижима, поскольку любое небольшое возмущение
в системе заставит траекторию покинуть полосу W —
, переместившись либо в Sor L.
Обратите внимание, что, поскольку ˙s∼1
u, скорость при котором траектория стремится либо к WL
, либо к W +
bin, резко возрастает по мере того, как u
стремится к нулю.Фактически, из уравнения (14) скорость изменения проскальзывания колеса становится бесконечной при u → 0 с
s6 = 1, s ∗. Следовательно, автомобиль должен остановиться в условиях устойчивого пробуксовки, для которых s = 1 или s = s ∗. Есть только
двух таких физических возможностей: транспортное средство замедляется до нулевой скорости (1) со скоростью µLg с заблокированными колесами или
(2) с установившимся пробуксовкой с абсолютной скоростью µ (s +) g. Пиковая характеристика устойчивого торможения повлечет за собой устойчивое скольжение при s = sp
, при котором достигается максимальное замедление, равное по величине µpg. Однако в разделе 2.7
Однако в разделе 2.7
будет показано, что переход в режим блокировки происходит до того, как s ∗ может достичь sp. Таким образом, поскольку sp не может быть достигнут при стабильных условиях торможения
, оптимальное торможение повлечет за собой установившееся проскальзывание при s = scr. Соответствующее замедление равно величине
µcr g = µ (s = scr) g <µpg. Но поскольку scr является седловым узлом в динамике скольжения, любое возмущение в
может привести к блокировке колес в условиях торможения. Критический тормозной момент, необходимый для поддержания оптимального торможения
, и соответствующая нестабильность блокировки при этом значении тормозного момента обсуждаются в Разделе 2.7.
Еще раз подчеркнем, что функция hb (s) полностью определяет нелинейное динамическое поведение системы с одним колесом
при торможении во всем диапазоне скоростей транспортного средства и значений скольжения. Учитывая безразмерный тормозной момент
b, достаточно вычислить нули hb (s) для количественной оценки значений установившегося скольжения и соответствующих инвариантных наборов.
Наклон hb (s) при этих значениях установившегося скольжения указывает на устойчивость соответствующих инвариантных многообразий.Обладая
этими знаниями, можно построить полное описание динамики транспортного средства в пространстве состояний для тормозного момента
, из которого можно легко извлечь информацию об областях стабильного и нестабильного торможения.
2.6. Гистерезис в тормозной системе с одним колесом модели
Безразмерная функция hb (s) и динамика (u, s) выявляют определенные особенности системы, которые в противном случае было бы трудно выделить. Снова обращаясь к рисунку 5, рассмотрим случай, когда бифуркация седло-узел уже произошла
и что текущее состояние системы — это состояние блокировки колеса (рисунок 5e).Интуитивно можно догадаться, что крутящий момент тормоза
нужно только уменьшить до значения, немного меньшего, чем Υcr
b = 15,250, чтобы снова было восстановлено стабильное торможение.
Однако это не так. Хотя стабильная инвариантная точка s + появляется снова, состояние системы остается на уровне
(u, 1), или блокировка колеса, поскольку эта точка также остается стабильной. Фактически, b должно быть значительно уменьшено ниже значения
ΥL
b, например, hb (1) <0, то есть блокировка должна быть дестабилизирована для восстановления стабильных условий торможения.Как только это происходит
, состояние системы переходит от блокировки колес к стабильным условиям торможения. Это «явление скачка» может быть
, которое удобно фиксировать с помощью бифуркационной диаграммы.
На рис. 6 показан график зависимости инвариантных точек s ∗ от тормозного момента. Сплошные линии
на верхней и нижней ветвях соответствуют значениям устойчивого установившегося скольжения s = 1 (обозначено блокировкой) и s + (обозначено устойчивым торможением), соответственно,
, а пунктирная линия соответствует значениям s− (обозначается нестабильным).Нелинейность коэффициента трения
формирует область, в которой скольжение является многозначным. Именно эта множественность значений установившегося скольжения ответственна за явление скачка
и поведение гистерезиса. Когда Υbis увеличивается с нуля, состояние системы регулируется стабильной нижней ветвью
. В конце концов проскальзывание дестабилизируется до значения, соответствующего точке a (где Υb = Υcr
band s = scr)
и перескакивает на верхнюю ветвь при блокировке колеса.Чтобы восстановить стабильные условия торможения, тормозной момент
должен быть уменьшен до значения, соответствующего точке b (где Υb <ΥL
b, например, hb (1) <0), где блокировка дестабилизирует
, вызывая откат назад в стабильную нижнюю ветвь.
ДИНАМИКА АВТОМОБИЛЯ
ДИНАМИКА АВТОМОБИЛЯ
Динамика автомобиля — сложный аналитический и экспериментальная технология, которая используется для изучения и понимания откликов автомобиль в различных ситуациях движения.В области обучения водителей нет необходимости иметь дело с особенности этой технологии, а скорее с некоторыми из основных физических принципы, вовлеченные в это. В следующие принципы будут обсуждаться в этом разделе.
И. Кинетическая энергия
II. Центробежная сила
III. Инерция
IV. Трение
В. Тяга
Есть не имеет намерения дать полное техническое определение каждого принципа, но представить их таким образом, чтобы было полезно понять, почему автомобиль действует так, как это делает.
Кинетическая энергия — это термин, описывающий энергию a Автомобиль имеет благодаря своей массе и скорости.Его формула проста, но говорит о многом.
Кинетическая энергия = (масса) x (скорость) 2
Это показывает, что кинетическая энергия транспортного средства увеличивается как квадрат скорости. Это означает, что при удвоении скорости энергия увеличивается в четыре раза. раз. Это увеличение энергии не вызывает проблема, если ее не нужно быстро рассеять или перенаправить.
Один способ, которым кинетическая энергия может рассеиваться очень быстро, — это когда автомобиль сталкивается с твердый объект.В этом случае, когда скорость увеличивается вдвое, в четыре раза больше энергии доступно для повреждения автомобиля и травмировать пассажиров. Кинетический Энергия автомобиля весом 4000 фунтов, движущегося со скоростью 100 миль в час, равна 1,36 миллиона фут-фунтов достаточно, чтобы поднять человека весом 175 фунтов на 1,5 мили. Чтобы остановить этот автомобиль, необходима огромная энергия. рассеиваться. Это можно сделать ударом или тормозами. Остановка расстояние связано с квадратом скорости; следовательно, 30 миль в час требует четырех умноженное на расстояние до остановки, превышающее 15 миль в час.Многие водители никогда не задумываются о последствиях увеличения скорости, но они должны осознавать связанные с этим риски.
ЦЕНТРОБЕЖНАЯ СИЛА
Когда автомобиль поворачивается, центробежная сила действует на автомобиль и пытается толкнуть его вне кривой. Формула это:
Центробежная сила = (масса) X (скорость) 2 / радиус поворота
Это показывает, что центробежная сила увеличивается как квадрат скорости.Также при заданной скорости малый (узкий) радиус повороты создают больше силы, чем повороты с большим радиусом. Большое количество центробежной силы требует одинаково больших количеств противодействующей силы от шин, если автомобиль должен оставаться на Дорога. Шины можно рассматривать как струны от каждого конца транспортного средства к центру поворота. Если центробежная сила выше, чем шины могут противодействовать, одна или обе струны порвутся. После этого автомобиль покинет поворот.
ИНЕРЦИЯ
Инерция сопротивление изменению направления или скорости тела в состоянии покоя. или в движении.В данном случае это связанные с изменением курса или направления транспортного средства; то есть изменение от движения прямо до поворота.
важность инерции и распределения веса, поскольку они связаны с вождением, заключается в том, что они влияют на количество времени, необходимое для перехода от прямого к поворот или наоборот. Хотя эти изменения при обычной загрузке транспортного средства невелики, водителю следует распознавать необычную загрузку транспортного средства, например, размещение большого груза на задней двери универсала (или добавление тяжелого груза на крыша транспортного средства) вызовет изменения в способе движения транспортного средства и регулировки должно производиться в управлении автомобилем соответственно.
С инерция диктует, что движущееся тело будет продолжать движение по прямой линии, необходимо приложить силу, чтобы заставить автомобиль повернуть. Эта сила называется Центростремительная сила , и возникает в результате растяжения шин при движении автомобиля с прямой дороги. Центробежная сила должна превышать центробежных усилие для поворота автомобиля.
МОМЕНТЫ ИНЕРЦИИ:
А. Шаг силы, ощущаемой при ускорении или торможении, вокруг (Горизонтальная ось) автомобиля
Б. Сила, ощущаемая при прохождении поворотов, из стороны в сторону (поперечное ось) автомобиля
С. Рыскание сила, ощущаемая при вращении вокруг (вертикальной оси) автомобиль
ПОЛЯРНЫЙ МОМЕНТ ИНЕРЦИИ
Очень важная концепция обращения, которая диктует готовность автомобиля изменить направление движения, если это называется полярным моментом. инерции.Полюса инерции просто другой способ сказать центр концентрации веса. Момент в этой концепции определяется расположением центра тяжести спереди назад. Автомобиль поворачивает (меняет направление) вокруг своего центр тяжести в углу, поэтому чем дальше центры тяжести концентрации расположены от центра тяжести (что является их общим центр), тем больше момент.
Высокий полярный момент инерции присутствует, когда весовые концентрации велики и далеко друг от друга.Низкий полярный момент инерции обнаруживается, когда вес концентрации невелики и близки друг к другу. Другими словами, легче управлять транспортным средством с низкой полярностью. момент инерции.
Автомобиль с низким полярным моментом инерции дает быстрое реагирование на команды рулевого управления. А автомобиль с высоким полярным моментом имеет высокую курсовую устойчивость (т.е. сопротивляется изменению своего направления).
Трение определяется как сопротивление движению между двумя поверхностями.Есть четыре основных типа трения.
А. Статическая удерживающая сила между двумя неподвижными поверхностями
Б. Скольжение сопротивления движению между двумя поверхностями, которые перемещаются друг напротив друга
С. Rolling Сопротивление движению катящегося объекта, как мяча, цилиндр или колесо
Д. Внутреннее сопротивление движению в упругих объектах (шины получают нагреваются от внутреннего трения при изгибе)
величина трения между двумя поверхностями зависит от:
1) вещество материала
2) шероховатость поверхностей
3) величина силы, прижимающей поверхности друг к другу
4) наличие смазочных материалов
величина трения между двумя поверхностями называется коэффициентом трения .
КОЭФФИЦИЕНТ ТРЕНИЯ
Термин «коэффициент трения» определяется как максимальная сила, которую может создать шина на заданном дорожном покрытии состояние, разделенное на вес шины. Его формула:
Максимально возможное усилие
Коэффициент трения = Вес на шине
ИЛИ
Максимальное доступное усилие = коэффициент трения X Вес нагрузки на колесо
Таким образом, маневренность автомобиля на сухой Дорога зависит в первую очередь от дорожного покрытия и веса транспортного средства.На мокрой дороге другие факторы, например, шина состояние также необходимо учитывать.
По мере того, как автомобиль ускоряется или замедляется больше быстро, или когда автомобиль поворачивает на более высоких скоростях, он требует большего тяговые силы от автопоезда. Комбинация шины и дороги будет создавать эти силы вплоть до предел трения.
Тяга определяется как сцепление шины с поверхностью дороги.Имеется три тяговых силы:
1) Driving Traction Для ускорения автомобиля
2) Тормозная тяга Для замедления или остановки автомобиля
3) Тяга на повороте Поворот автомобиля
при каждый раз, когда сила тяги становится больше, чем коэффициент трения, автомобиль выйдет из-под контроля.
А водитель может задействовать три силы. Для любой ситуации существует определенный уровень трения. (коэффициент) для приложения этих сил и, следовательно, для маневрирования автомобиль. Когда водитель напрягает либо тормозная сила, либо сила ускорения при одновременном приложении сила поворота, вы должны добавить силы, учитывая доступные трение. Другими словами, сумма тяга при вождении или торможении и тяга на поворотах не должны на превышать предел трения, иначе автомобиль выйдет из-под контроля.По возможности избегайте торможения или ускоряется при прохождении поворотов. Этот позволяет использовать все имеющееся трение при прохождении поворотов.
А вращающаяся шина не может обеспечить полное сцепление с дорогой при ускорении. Если водитель вызывает пробуксовку ведущего колеса при при прохождении поворотов автомобиль может выйти из-под контроля.
А заблокированная шина обеспечивает no сцепление на поворотах и пониженное торможение тяга. Когда водитель блокирует колеса в повороте, не будет реагировать на рулевое управление .При торможении максимальный коэффициент трение; следовательно, максимальная тормозная способность — это когда водитель применяет тормоза на уровне 15% пробуксовки.
Адаптивная система контроля тяги автомобиля: комбинированное продольное и поперечное движение
Наша основная цель — разработать метод контроля тяги, который управляет положением дроссельной заслонки (крутящим моментом колеса) только на основе измеренного продольного ускорения. Поскольку также является целью реализовать метод на цифровом контроллере, мы сначала дискретизируем динамическую модель транспортного средства, сохраняя при этом нелинейности.Блок-схема на рис. 5 показывает, что линейная динамическая система имеет два выхода и два входа. Эта конкретная структура, то есть непрерывная динамика LTI в сочетании с нелинейным трактом обратной связи, является обобщенным представлением нелинейной динамической системы. Подход на основе градиента, мотивированный исследованием системы контроля тяги HIL [1], предлагается в качестве возможного решения для определения оптимального положения дроссельной заслонки для максимизации продольных и поперечных ускорений. Есть много возможных подходов на основе градиента, которые можно использовать; однако для этого исследования был выбран подход наискорейшего восхождения.
Предполагая, что соответствующий метод выбран для дискретизации системы уравнений. 6 и 7, можно прийти к системе уравнений. 20 и 21.
$$ \ begin {align} & \ mathbf {x} _ {k + 1} = \ mathbf {A} \ mathbf {x} _k + \ mathbf {B} \ mathbf {u} _k + \ mathbf {F} \ mathbf {u ‘} _ k \ end {align} $$
(20)
$$ \ begin {align} & \ mathbf {y} _ {k} = \ mathbf {C} \ mathbf {x} _k + \ mathbf {D} \ mathbf {u} _k + \ mathbf {G} \ mathbf {u ‘} _k \ end {align} $$
(21)
Выход \ (\ mathbf {y} _k \) динамической системы в этот момент не привязан к измеряемой величине и считается общим выходом динамической системы, показанной на рис. T_k}} {\ partial {\ mathbf {u} _k}} \ mathbf {Q} \ mathbf {y} _k.\ end {align} $$
(24)
Здесь важно отметить структуру, которую этот алгоритм принимает для случаев с несколькими входами и множеством выходов (MIMO) и с одним входом и множеством выходов (SIMO). Отметим, что обозначение модели как MIMO или SIMO относится к модели объекта, где входные данные относятся к \ (\ mathbf {u} _k \), а выходные данные относятся к \ (\ mathbf {y} _k \). Варианты с одним входом и одним выходом (SISO) и с несколькими входами и одним выходом (MISO) просты; однако применение к случаям MIMO и SIMO требует пояснений.Используя термин градиента, определенный в соответствии с формулой. 24 требует использования банка фильтров для случаев MIMO и SIMO. По сути, банк фильтров состоит из отдельных фильтров, которые используют ту же структуру, что и для случаев SISO и MISO. Это становится ясно при изучении уравнения. 25, и должен устранить любую двусмысленность при сравнении структуры MIMO и SIMO со структурой MISO и SISO. T \ mathbf {Q} \ mathbf {y} _ {k} \ end {align} $$
(25)
После формулировки градиента как процесса с дискретным временем по формуле.{-1} \) в сочетании с системой уравнений 26 и 27, можно определить эквивалентную систему в форме Ур. 27.
$$ \ begin {выровнено} & \ left [\ begin {array} {c} \ mathbf {x} (z) \\ \ mathbf {y} (z) \ end {array} \ right] = \ mathbf {T} \ left [\ begin {array} {c} \ mathbf {u} (z) \\ \ mathbf {u ‘} \ left (\ mathbf {y’} \ right) \ end {array} \ right] \\ & \ mathbf {T} = \ left [\ begin {array} {cc} \ mathbf {H} (z) \ mathbf {B} & {} \ mathbf {H} (z) \ mathbf {F } \\ \ mathbf {C} \ mathbf {H} (z) \ mathbf {B} + \ mathbf {D} & {} \ mathbf {C} \ mathbf {H} (z) \ mathbf {F} + \ mathbf {G} \ end {array} \ right] \ nonumber \ end {align} $$
(27)
Опять же, важно отметить, что когда \ (\ mathbf {u ‘} \ left (\ mathbf {y’} (z) \ right) = \ mathbf {0} \) или \ (\ mathbf {F} = \ mathbf {G} = \ mathbf {0} \), система сводится к линейной инвариантной системе во времени.Чтобы оценить член градиента в уравнении. 24 вывод уравнения. 27 можно дифференцировать, что дает выражение для \ ({\ partial {\ mathbf {y} (z)}} / {\ partial {\ mathbf {u} (z)}} \).
$$ \ begin {align} \ frac {\ partial {\ mathbf {y} (z)}} {\ partial {\ mathbf {u} (z)}} & = \ left [\ mathbf {C} \ mathbf {H} (z) \ mathbf {B} + \ mathbf {D} \ right] \ frac {\ partial {\ mathbf {u} (z)}} {\ partial {\ mathbf {u} (z)} } \ nonumber \\ & + \ left [\ mathbf {C} \ mathbf {H} (z) \ mathbf {F} + \ mathbf {G} \ right] \ frac {\ partial {\ mathbf {f} \ left (\ mathbf {y ‘} (z) \ right)}} {\ partial {\ mathbf {u} (z)}} \ end {align} $$
(28)
По определению, член нелинейной обратной связи \ (\ mathbf {f} (\ mathbf {y ‘} (z)) \) является функцией обоих состояний \ (\ mathbf {x} (z) \) и входы \ (\ mathbf {u} (z) \).Расширение частной производной этого члена приводит к формуле. 29.
$$ \ begin {align} \ frac {\ partial {\ mathbf {f}} \ left (\ mathbf {y ‘} (z) \ right)} {\ partial {\ mathbf {u} (z )}} & = \ frac {\ partial {\ mathbf {f} (z)}} {\ partial {\ mathbf {x} (z)}} \ frac {\ partial {\ mathbf {x} (z)} } {\ partial {\ mathbf {u} (z)}} \ end {align} $$
(29)
Подставляя уравнение. 29 в выходное уравнение, Ур. 28, приводит к расширенному выражению для \ ({\ partial {\ mathbf {y} (z)}} / {\ partial {\ mathbf {u} (z)}} \) в уравнении.30.
$$ \ begin {align} \ frac {\ partial {\ mathbf {y} (z)}} {\ partial {\ mathbf {u} (z)}} & = \ left [\ mathbf {C } \ mathbf {H} (z) \ mathbf {B} + \ mathbf {D} \ right] \ nonumber \\ & + \ left [\ mathbf {C} \ mathbf {H} (z) \ mathbf {F} + \ mathbf {G} \ right] \ left [\ frac {\ partial {\ mathbf {f} (z)}} {\ partial {\ mathbf {x} (z)}} \ frac {\ partial {\ mathbf {x} (z)}} {\ partial {\ mathbf {u} (z)}} \ right] \ end {align} $$
(30)
Частная производная вектора состояния, которая отображается в уравнении.30, можно выразить как Ур. 31.
$$ \ begin {align} \ frac {\ partial {\ mathbf {x} (z)}} {\ partial {\ mathbf {u} (z)}} & = \ mathbf {H} (z ) \ mathbf {B} + \ mathbf {H} (z) \ mathbf {F} \ left [\ frac {\ partial {\ mathbf {f} (z)}} {\ partial {\ mathbf {x} (z )}} \ frac {\ partial {\ mathbf {x} (z)}} {\ partial {\ mathbf {u} (z)}} \ right] \ end {align} $$
(31)
Поскольку уравнение. { -1} \ mathbf {H} (z) \ mathbf {B} \ end {align} $$
(32)
Подставляя уравнение.{-1} \ mathbf {H} \ mathbf {B} \ right \} \ end {align} $$
(33)
Уравнение 33 сложно реализовать в реальном времени. На практике более надежно и эффективно выразить уравнение. 33 как дискретная система в пространстве состояний. Для упрощения обозначений дано еще одно определение.
$$ \ begin {align} \ varOmega = \ mathbf {F} \ frac {\ partial {\ mathbf {f}}} {\ partial {\ mathbf {x}}} \ end {выравнивается} $$
(34)
Подставив \ (\ varOmega \) в часть уравнения.Т \). Эта единственная динамическая система, которая изменяется линейно во времени, расширяется до системы, описываемой уравнениями. 50 и 49. Эта система хорошо подходит для приложений в реальном времени при условии наличия априорных знаний, необходимых для вычисления \ ({{\ partial {\ mathbf {f} _k}}}} / {{\ partial {\ mathbf {x} _k} }} \) и \ ({{\ partial {\ mathbf {f} _k}}} / {{\ partial {\ mathbf {u} _k}}} \) доступно.
(49)
(50)
Член \ ({\ partial {\ mathbf {f} _k}}} / {{\ partial {\ mathbf {x} _k}}} \) в уравнениях.49 и 50 с участием частных производных нелинейной функции уравнения. 3 относительно состояний и входов представляют квазипостоянные матрицы преобразования. Частичный \ ({{\ partial {\ mathbf {{f} _k}}}} / {{\ partial {\ mathbf {{x}} _ {k}}}} \) для динамической модели велосипеда с 3 степенями свободы вычислять довольно утомительно. Соответствующие частные производные, \ ({\ partial {F_ {xt}}} / {\ partial {\ kappa}} \), \ (\ partial {F_ {xt}} / {\ partial {\ alpha}} \) , \ ({\ partial {F_ {yt}}} / {\ partial {\ kappa}} \), \ ({\ partial {F_ {yt}}} / {\ partial {\ alpha}} \) представлены , для иллюстрации на рис.7 и 8.
Рис. 7Частные производные от \ (F_ {xt} \) по коэффициенту скольжения \ (\ kappa \) и углу скольжения \ (\ alpha \) при работе в комбинированном режиме трения
Рис. 8Частные производные от \ (F_ {yt} \) по коэффициенту скольжения \ (\ kappa \) и углу скольжения \ (\ alpha \) при работе в комбинированном режиме с трением
Закон косвенной адаптации
Когда \ (\ mathbf {y} _k \), выходной сигнал динамической системы, определяется как продольное и поперечное ускорения, \ (\ mathbf {y} _k = [\ dot {v} _ {x, k}, \, \ dot {v} _ {y, k}] \) адаптация называется законом косвенной адаптации.Если мы определим положительно определенную матрицу \ (\ mathbf {Q} = \ left [\ begin {array} {ccccc} q_ {11} & q_ {12} &; & q_ {21} & q_ {22} \ end {array} \ справа] \), то уравнение. 24 может быть расширен и выражен как Ур. 52 для использования закона косвенной адаптации. Чтобы подкрепить концепцию использования банка фильтров для определения градиента динамической системы, следует отметить, что два члена частной производной в правой части уравнения. 52 — оба фильтра. Теперь должно быть ясно, как можно использовать дискретный фильтр для оценки градиента для общего класса систем SISO, SIMO, MISO и MIMO.
$$ \ begin {align} \ frac {\ partial {J} (\ mathbf {u} _k)} {\ partial {\ mathbf {u} _k}} & = \ frac {\ partial {J_x} (\ mathbf {u} _k)} {\ partial {\ mathbf {u} _k}} + \ frac {\ partial {J_y} (\ mathbf {u} _k)} {\ partial {\ mathbf {u} _k}} \ конец {выровнен} $$
(51)
$$ \ begin {align} \ frac {\ partial {J} (\ mathbf {u} _k)} {\ partial {\ mathbf {u} _k}} & = \ frac {\ partial {\ dot {v} _ {x, k}}} {\ partial {T_ {c, k}}} \ left [q_ {11} \ dot {v} _ {x, k} + q_ {12} \ dot {v} _ { y, k} \ right] \ nonumber \\ & + \ frac {\ partial {\ dot {v} _ {y, k}}} {\ partial {T_ {c, k}}} \ left [q_ {21 } \ dot {v} _ {x, k} + q_ {22} \ dot {v} _ {y, k} \ right] \ end {align} $$
(52)
Закон прямой адаптации
Мотивация для закона прямой адаптации станет ясна при анализе результатов моделирования, сравнивающего законы косвенной и прямой адаптации. T \).T_k \ mathbf {Q_b} \ mathbf {f} _k \ end {align} $$
(53)
Цель по-прежнему состоит в том, чтобы максимизировать целевую функцию в уравнении. 53. Это может быть выполнено с использованием вышеупомянутого адаптивного алгоритма на основе градиента уравнения. 23. Чтобы определить градиент уравнения. 53 необходимо дифференцировать по входному вектору \ (\ mathbf {u} \). Затем градиент определяется согласно формуле. 55, аналогично предыдущему определению градиента, но в этом случае целевая функция изменилась.T_k}} {\ partial {\ mathbf {u} _k}} \ mathbf {Q} \ mathbf {f} _k. \ end {align} $$
(55)
Для дальнейшего расширения целевой функции уравнения. 55 мы возвращаемся к формуле. 29 перечислены здесь для согласованности.
$$ \ begin {align} \ frac {\ partial {\ mathbf {f}} \ left (\ mathbf {y ‘} (z) \ right)} {\ partial {\ mathbf {u} (z)} } & = \ frac {\ partial {\ mathbf {f} (z)}} {\ partial {\ mathbf {x} (z)}} \ frac {\ partial {\ mathbf {x} (z)}} { \ partial {\ mathbf {u} (z)}} \ end {align} $$
Вывод продолжается, начиная с уравнения.29 и продолжая систему Ур. 42. Теперь должно быть ясно, что система Ур. 42 фильтрует сигналы ускорения, как в случае использования целевой функции уравнения. 22 или нелинейные силы \ (\ mathbf {f} \ left (\ mathbf {y ‘} (z) \ right) \), как в случае использования целевой функции уравнения. 53. Это не должно вызывать удивления, поскольку согласно второму закону Ньютона чистая сила \ (\ mathbf {f} \ left (\ mathbf {y ‘} (z) \ right) \) на теле прямо пропорциональна его ускорение \ (\ mathbf {y (z)} \).{(3)} (z) \) путь. В случае модели велосипеда с 3 степенями свободы набор фильтров описывается в соответствии с формулой. 56.
$$ \ begin {align} & \ frac {\ partial {J_f} (\ mathbf {u} _k)} {\ partial {\ mathbf {u} _k}} = \ nonumber \\ & \ left [ \ begin {array} {c} \ frac {\ partial {f_1}} {\ partial {T_ {c, k}}} \ left (q_ {11} F_ {xtf, k} + q_ {12} F_ {xtr , k} + q_ {13} F_ {ytf, k} + q_ {14} F_ {ytr, k} \ right) \\ \ frac {\ partial {f_2}} {\ partial {T_ {c, k}} } \ left (q_ {21} F_ {xtf, k} + q_ {22} F_ {xtr, k} + q_ {23} F_ {ytf, k} + q_ {24} F_ {ytr, k} \ right) \\ \ frac {\ partial {f_3}} {\ partial {T_ {c, k}}} \ left (q_ {31} F_ {xtf, k} + q_ {32} F_ {xtr, k} + q_ { 33} F_ {ytf, k} + q_ {34} F_ {ytr, k} \ right) \\ \ frac {\ partial {f_4}} {\ partial {T_ {c, k}}} \ left (q_ { 41} F_ {xtf, k} + q_ {42} F_ {xtr, k} + q_ {43} F_ {ytf, k} + q_ {44} F_ {ytr, k} \ right) \ end {array} \ вправо] \ nonumber \\ \ end {выровнено} $$
(56)
Алгоритм прямой адаптации, описанный в этом разделе, предпочтительнее закона косвенной адаптации, поскольку он обеспечивает больший контроль над каждым компонентом сил с использованием матрицы весов \ (\ mathbf {Q} \). T \ frac {\ partial {J_f}} {\ partial {\ mathbf {u} _k}} \ end {align} $$
(58)
$$ \ begin {align} & {\ nabla _ {k}} = \ frac {\ partial {J_ {fx}}} {\ partial {\ mathbf {u} _k}} + \ frac {\ partial {J_ {fy}}} {\ partial {\ mathbf {u} _k}} \ end {align} $$
(59)
Автомобиль — сила тяги
Сила тяги между колесом автомобиля и поверхностью может быть выражена как
F = μ t W
= μ t ma g (1)
, где
F = тяговое усилие или сила, действующая на колесо со стороны поверхности (Н, фунт f )
μ t = коэффициент сцепления или трения между колесом и поверхностью
W = вес или вертикальное усилие между колесом и поверхностью (Н, фунтов f ) )
м = масса на колесе (кг, пули )
a г = ускорение свободного падения (9.81 м / с 2 , 32,17405 фут / с 2 )
Коэффициенты сцепления для обычных автомобильных шин
| Поверхность | Коэффициент сцепления | |
|---|---|---|
| Мокрый лед | 0,1 | |
| Сухой лед / снег | 0,2 | |
| Рыхлый песок | 0,3 — 0,4 | |
| Сухая глина | 0.5 — 0,6 | |
| Гравий мокрый прокат | 0,3 — 0,5 | |
| Гравий сухой прокат | 0,6 — 0,7 | |
| Мокрый асфальт | 0,6 | |
| Мокрый бетон | 9096 0,6 9096 0,6Асфальт | 0,9 |
| Сухой бетон | 0,9 |
Пример — тяговое усилие на ускоряющемся автомобиле
Максимальное тяговое усилие , доступное на одном из двух задних колес автомобиля с задним приводом — с масса 2000 кг равномерно распределена по всем четырем колесам — по мокрому асфальту с коэффициентом сцепления 0.5 — можно рассчитать как
F one_wheel = 0,5 ((2000 кг) (9,81 м / с 2 ) / 4)
= 2453 Н
Сила тяги от обоих задних колес
F both_wheels = 2 (2452 Н)
= 4905 Н
Примечание! — что во время разгона сила двигателя создает момент, который пытается повернуть автомобиль вокруг ведущих колес. Для автомобиля с задним приводом это выгодно за счет увеличения вертикальной силы и увеличения тяги на ведущих колесах.Для автомобиля с передним приводом сила тяги будет уменьшаться во время разгона.
максимальное ускорение автомобиля в этих условиях можно рассчитать с помощью Второго закона Ньютона как
автомобиль = F / m
= (4904 Н) / (2000 кг)
= 2,45 м / с 2
= (2,45 м / с 2 ) / (9,81 м / с 2 )
= 0.25 г
где
a автомобиль = ускорение автомобиля (м / с 2 )
Минимальное время до разгона с 0 км / ч до 100 км / ч можно рассчитать как
dt = dv / a легковой автомобиль
= ((100 км / ч) — (0 км / ч)) (1000 м / км) (1/3600 ч / с) / (2,4 м / с 2 )
= 11,3 с
где
dt = используемое время (с)
dv = изменение скорости (м / с)
Калькулятор ускорения автомобиля
Этот калькулятор можно использовать для расчета максимального ускорения и минимального времени разгона автомобиля на различных поверхностях.
масса автомобиля (кг)
коэффициент тяги
шт. колес
конечная скорость (км / ч)
Крутящий момент, тяга и пробуксовка колес — крутящий момент, тяга и пробуксовка колеса
Крутящий момент — это крутящая сила, которую создает двигатель. Крутящий момент двигателя — это то, что движет вашей машиной. Различные шестерни трансмиссии и дифференциала увеличивают крутящий момент и распределяют его между колесами.На первой передаче крутящий момент может быть передан на колеса больше, чем на пятой передаче, потому что первая передача имеет большее передаточное число, на которое умножается крутящий момент.
Гистограмма ниже показывает величину крутящего момента, развиваемого двигателем. Отметка на графике указывает величину крутящего момента, которая вызовет пробуксовку колеса. Автомобиль, который хорошо трогается с места, никогда не превышает этот крутящий момент, поэтому шины не проскальзывают; автомобиль, который плохо трогается с места, превышает этот крутящий момент, поэтому шины проскальзывают. Как только они начинают проскальзывать, крутящий момент падает почти до нуля.
Этот контент несовместим с этим устройством.
Интересная особенность крутящего момента заключается в том, что в ситуациях с низким сцеплением максимальный крутящий момент, который может быть создан, определяется количеством тяги, а не двигателем. Даже если в вашем автомобиле установлен двигатель NASCAR, если шины не будут прилипать к земле, просто невозможно использовать эту мощность.
В рамках этой статьи мы определим тяговое усилие как максимальное количество силы, которое шина может приложить к земле (или которую земля может приложить к шине — это одно и то же).Вот факторы, которые влияют на тягу:
Вес шины — Чем больше вес на шине, тем больше у нее сцепления. Вес может смещаться при движении автомобиля. Например, когда автомобиль делает поворот, вес переносится на внешние колеса. Когда он ускоряется, вес переносится на задние колеса. (Для получения более подробной информации см. Как работают тормоза.)
Коэффициент трения — Этот коэффициент связывает величину силы трения между двумя поверхностями с силой, удерживающей две поверхности вместе.В нашем случае он связывает силу сцепления между шинами и дорогой с весом, лежащим на каждой шине. Коэффициент трения в основном зависит от типа шин на транспортном средстве и типа поверхности, по которой оно движется. Например, шина NASCAR имеет очень высокий коэффициент трения при движении по сухой бетонной трассе. Это одна из причин, почему гоночные автомобили NASCAR могут разворачиваться на такой высокой скорости. Коэффициент трения той же шины в грязи будет почти равен нулю.Напротив, огромные, узловатые, внедорожные шины не имели бы такого высокого коэффициента трения на сухой трассе, но в грязи их коэффициент трения чрезвычайно высок.
Пробуксовка колес — Шины могут контактировать с дорогой двух видов: статический и динамический.
- статический контакт — Шина и дорога (или земля) не скользят относительно друг друга. Коэффициент трения для статического контакта выше, чем для динамического контакта, поэтому статический контакт обеспечивает лучшее сцепление.
- динамический контакт — Шина скользит относительно дороги. Коэффициент трения для динамического контакта ниже, поэтому у вас меньше тяги.
Проще говоря, пробуксовка колеса происходит, когда сила, приложенная к шине, превышает силу сцепления, доступную этой шине. Сила прикладывается к шине двумя способами:
- Продольно — Продольная сила возникает из крутящего момента, прикладываемого к шине двигателем или тормозами. Он имеет тенденцию либо ускорять, либо замедлять автомобиль.
- Боковое — Боковое усилие создается, когда автомобиль движется по повороту. Чтобы заставить автомобиль изменить направление, требуется сила — в конечном итоге поперечную силу создают шины и земля.
Допустим, у вас достаточно мощный заднеприводный автомобиль, и вы едете по кривой по мокрой дороге. Ваши шины обладают достаточным сцеплением, чтобы прикладывать поперечную силу, необходимую для удержания вашего автомобиля на дороге при повороте. Допустим, вы нажимаете педаль газа в середине поворота ( не делайте этого! ) — ваш двигатель передает намного больший крутящий момент на колеса, создавая большое количество продольной силы.Если вы сложите продольную силу (создаваемую двигателем) и поперечную силу, создаваемую при повороте, и полученная сумма превышает доступное тяговое усилие, вы просто создадите пробуксовку колес.
Большинство людей даже близко не подходят к превышению доступного сцепления на сухом или даже ровном мокром асфальте. Полноприводные и полноприводные системы наиболее полезны в условиях плохого сцепления с дорогой, например, на снегу и на скользких склонах.
Преимущества полного привода легко понять: если вы управляете четырьмя колесами вместо двух, у вас есть возможность удвоить величину продольной силы (силы, которая заставляет вас двигаться), на которую действуют шины. земля.
Это может помочь в самых разных ситуациях. Например:
- В снегу — Чтобы протолкнуть машину по снегу, требуется большое усилие. Доступная сила ограничена доступной силой тяги. Большинство полноприводных автомобилей не могут двигаться, если на дороге больше нескольких дюймов снега, потому что на снегу каждая шина имеет лишь небольшое сцепление с дорогой. Полноприводный автомобиль может использовать тягу всех четырех шин.
- Внедорожник — В условиях бездорожья довольно часто хотя бы один комплект шин находится в ситуации с низким сцеплением, например, при пересечении ручья или грязевой лужи.С полным приводом другой комплект шин по-прежнему сохраняет сцепление, поэтому они могут вытащить вас.
- Подъем по скользким холмам — Эта задача требует большого тягового усилия. Полноприводный автомобиль может использовать тягу всех четырех шин, чтобы тянуть автомобиль вверх по склону.
Также есть ситуации, в которых полный привод не дает преимущества перед полным приводом. В частности, полноприводные системы не помогут вам остановиться на скользкой поверхности. Все дело в тормозах и антиблокировочной тормозной системе (ABS).
Теперь давайте посмотрим на части, из которых состоит система полного привода.
Стратегия контроля тяги с моделью эффективности в распределенном транспортном средстве
Как активная безопасность, так и экономия топлива являются важными проблемами для транспортных средств. В этой статье основное внимание уделяется стратегии контроля тяги с моделью эффективности в электромобиле с распределенным вождением. В аварийной ситуации был использован алгоритм управления скользящим режимом для достижения контроля против скольжения за счет поддержания коэффициента проскальзывания колес ниже 20%.Для общих случаев продольного вождения модель эффективности, направленная на повышение экономии топлива, была построена через поток автономной оптимизации в двухмерном пространстве проектирования, состоящем из сигнала педали ускорения и скорости автомобиля. Были смоделированы стратегия управления скользящим режимом для соединенных дорог и модель эффективности для типичных ездовых циклов. Результаты моделирования показывают, что предложенный подход к управлению движением может применяться к различным дорожным покрытиям. Он поддерживает коэффициент пробуксовки колес в стабильной зоне и улучшает экономию топлива за счет отслеживания намерений водителя.
1. Введение
Для решения двух актуальных в настоящее время проблем защиты окружающей среды и достижения энергетической устойчивости в глобальном масштабе стратегически важно заменить зависимые от нефти транспортные средства электромобилями (ЭМ) [1–3]. По сравнению с автомобилями с двигателем внутреннего сгорания, электромобили с двигателями имеют множество замечательных преимуществ, таких как более быстрое и точное создание крутящего момента, более простое измерение крутящего момента двигателя [4], что открывает широкие возможности для управления динамикой автомобиля.За последние несколько лет исследователи разработали многие типы приводных систем для электромобилей. Kim et al. изучили управление переходом режима для двигателя внутреннего сгорания вместе с двигателем [5]. Лю и др. провели дальнейшее исследование управления движением электромобилей с независимыми передними и задними колесами [6]. Двигатели электромобиля с распределенным приводом устанавливаются непосредственно в колеса или рядом с ними, что приводит к короткой и эффективной цепи передачи и компактной конструкции, поэтому это становится важным направлением исследований электромобилей [7].
Управление динамикой транспортного средства с распределенным вождением электромобиля — одно из направлений исследований в настоящее время, которое привлекает большое внимание ученых [8–10]. Ибрагим и др. предоставили новый блок оценки момента нагрузки для повышения устойчивости системы тягового привода [11]. Gasbaoui et al. предложил стратегию прямого управления крутящим моментом для обеспечения безопасности и устойчивости, которые проверяются на всех типах дорог [12]. Athari et al. предложила новую стратегию управления вектором крутящего момента для транспортного средства с электрическим приводом с четырьмя колесными двигателями, чтобы помочь водителю управлять транспортным средством в неожиданных условиях [13].Chen et al. изучили нечеткий метод контроля сцепления для четырехколесного электромобиля, и этот метод был подтвержден дорожным экспериментом [14]. Kim et al. предложили алгоритм управления движением для автомобиля 6WD / 6WS, оснащенного шестью колесными двигателями, для улучшения устойчивости и маневренности автомобиля [15]. Несколько исследователей также исследовали стратегии управления для повышения экономии энергии транспортных средств [16, 17]. Для повышения экономии энергии и устойчивости движения необходима и очень важна стратегия управления электромобилями с распределенным приводом.
Сосредоточившись на электромобиле с распределенным приводом с полным приводом (4 колеса), в этом документе представлена стратегия управления движением для повышения безопасности вождения и экономии топлива. Чтобы обеспечить безопасность движения в аварийной ситуации, мы использовали стратегию управления скользящим режимом, чтобы гарантировать скорость пробуксовки колес в стабильной зоне. Помимо этого случая, применяется модель эффективности для снижения энергопотребления. Модель эффективности строится методом оптимизации в двухмерном пространстве дизайна, и это пространство содержит сигнал педали ускорения и скорость автомобиля.При построении модели эффективности, чтобы избежать проблемы, заключающейся в том, что методы онлайн-оптимизации имеют ограничения, связанные с тяжелыми вычислениями, мы используем методы поверхности отклика для разработки прогнозной модели, которая может реализовать управление в реальном времени через поток автономной оптимизации. Стратегия управления движением для различных случаев была проверена посредством моделирования.
Эта статья организована следующим образом. Модель динамики автомобиля построена в разделе 2, где приведены основные параметры автомобиля.В разделе 3 разрабатывается стратегия управления движением с моделью эффективности. Результаты моделирования и аналитический эксперимент представлены в Разделе 4 до того, как в Разделе 5 будут сделаны выводы.
2. Модель динамики транспортного средства
2.1. Конфигурация системы
Конфигурация системы питания электромобиля с распределенным приводом показана на рисунке 1.
Это электромобиль с полным приводом и четырьмя двигателями. Через высоковольтную распределительную коробку основная батарея, за которой непосредственно следила система управления батареями, обеспечивает электроэнергией каждый контроллер двигателя.Контроллер мотора преобразует постоянный ток в трехфазный переменный ток для мотора в соответствии с командой требования крутящего момента. Для подачи питания на контроллеры и другую низковольтную аппаратуру оборудована вспомогательная батарея, которая заряжается от основной батареи через трансформатор постоянного / постоянного тока. Кроме того, связь с автомобилем осуществляется по шине CAN (сеть контроллера). При продольном движении блок управления транспортным средством будет анализировать и вычислять потребность в крутящем моменте каждого двигателя электромобиля в реальном времени в соответствии со стратегией управления.Затем требуемый крутящий момент каждого двигателя будет передан на шину CAN. После приема сигнала требования крутящего момента от шины CAN контроллер двигателя преобразует их в трехфазный переменный ток, чтобы соответствующий двигатель генерировал фактический крутящий момент привода. В конце концов, двигатели приводят в движение автомобиль, а контроллеры двигателей передают обратную связь по шине CAN. Чтобы узнать скорость автомобиля, электромобиль оснащен GPS.
Технические характеристики электромобилей с распределенным вождением показаны в таблице 1.
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||
2.2. Продольная динамическая модель автомобиля
2.2.1. Модель с одним колесом
Учитывая, что каждое колесо может управляться независимо в электромобилях с распределенным приводом, принята модель с одним колесом. Модель показана на рисунке 2. В соответствии с динамикой транспортного средства, если игнорировать сопротивление качению, уравнение движения колеса может быть определено как где — инерция вращения колеса, означает тяговое усилие колеса на дороге, обозначает скорость колеса, представляет тяговый момент колеса и — радиус колеса.
Кроме того, коэффициент скольжения колеса можно описать как где — коэффициент скольжения колеса, а — скорость автомобиля.
2.2.2. Модель шины
«Волшебная формула», разработанная Пацейкой и др. широко используется как способ моделирования при динамическом моделировании [18]. Для продольного динамического движения продольная сила шины может быть упрощена как где,, и обозначают пик, форму, жесткость и коэффициент кривизны соответственно.Вышеуказанные параметры можно получить следующим образом: где обозначает вертикальную нагрузку на шину и является коэффициентом посадки, который можно получить из таблицы 2.
| |||||||||||||||||||||||||||||||||||||||
| () — это коэффициент подгонки, необходимый для расчета продольной силы шины, соответственно, в «Волшебной формуле», разработанной Пацейкой и др. [18]. | |||||||||||||||||||||||||||||||||||||||
2.2.3. Приводной момент Модель
Исходя из пикового крутящего момента двигателей при заданной скорости двигателя, требуемый момент тяги для общего случая привода может быть получен как где — максимальный крутящий момент двигателя при заданной скорости двигателя, его можно получить из рисунка 3; означает сигнал педали акселератора.
2.2.4. КПД двигателя Модель
КПД двигателя, включающий КПД контроллера двигателя, показанный на рисунке 4, был измерен с помощью специального динамометра.
Согласно рисунку 4, если вычислены скорость вращения двигателя и крутящий момент двигателя, соответствующие значения эффективности могут быть получены из таблицы данных испытаний. Данные, которых нет в таблице, можно рассчитать с помощью метода двоичной интерполяции Лагранжа, как показано на рисунке 5.КПД двигателя в любой момент можно рассчитать по следующей формуле:
3. Стратегия и алгоритм управления движением
3.1. Блок-схема стратегии управления
В этом документе в основном исследуются стратегии управления в сценарии продольного вождения, который имеет два уровня. На рисунке 6 показана иерархическая стратегия управления. Верхний слой предназначен для получения разумного предварительного распределения крутящего момента двигателя, а нижний слой предназначен для обеспечения продольной устойчивости и требуемого крутящего момента привода.В соответствии со скоростью транспортного средства и сигналом педали ускорения верхний уровень может получить схему предварительного распределения крутящего момента двигателя на основе модели эффективности. Тогда распределенный крутящий момент будет передан нижнему слою. Нижний уровень сначала рассчитает коэффициент скольжения на основе значения предварительного распределения крутящего момента, а затем решит, нужно ли применять алгоритм управления режимом скольжения. В конце концов, он подаст команду требуемого крутящего момента на каждый двигатель, подчиняясь принципу равного крутящего момента между двумя колесами одной оси.
3.2. Верхний слой
3.2.1. Модель эффективности
Когда транспортное средство движется в общем случае, крутящий момент привода будет распределяться с помощью модели эффективности в этой статье.
Чтобы максимизировать эффективность вождения, обычно применяется метод оптимизации для разработки модели эффективности. Однако это может вызвать проблему в реальном времени во время вождения автомобиля. Таким образом, технология модели поверхности отклика была использована в модели эффективности для реализации управления в реальном времени.Модель эффективности была построена в двухмерных пространствах дизайна, которые состоят из сигнала педали ускорения и скорости автомобиля на основе данных автономной оптимизации.
Оптимизационная математическая модель . Для выполнения потока офлайн-оптимизации была создана математическая модель оптимизации для получения максимальной общей эффективности вождения.
Электромобиль с распределенным приводом (см. Рис. 1), которому посвящена данная статья, имеет четыре двигателя. Общий выходной крутящий момент двигателей определяется следующим образом: где,, и — крутящие моменты двигателя 1, двигателя 2, двигателя 3 и двигателя 4 соответственно.
Обычно два момента двигателя каждой оси должны быть равны в модели продольной динамики:
Как следствие баланса крутящего момента в (7) и (8) рабочие точки трансмиссии полностью определяются путем выбора разделения крутящего момента двигателя между передней осью и задней осью. Таким образом, коэффициент распределения тягового усилия определяется как коэффициент распределения крутящего момента: Когда равно 1, это означает, что автомобиль находится только в режиме привода на переднюю ось.Принимая во внимание, что один только способ управления передней осью аналогичен по результату задней оси, коэффициент распределения может быть ограничен от 0,5 до 1.
Общий КПД системы трансмиссии определяется моделью эффективности каждого двигателя из эксперимента как следует: где и обозначают скорость и крутящий момент каждого двигателя соответственно. обозначает эффективность каждого двигателя при соответствующей скорости двигателя. обозначает общий КПД системы силовых двигателей.
С учетом этого ограничения математическая модель оптимизации может быть выражена следующим образом: где обозначают максимальный выходной крутящий момент каждого двигателя при заданной скорости двигателя, соответственно.
Поток автономной оптимизации . В соответствии с математической моделью оптимизации была разработана автономная оптимизация, как показано на рисунке 7. Ее можно в основном разделить на три этапа.
Шаг 1. Принимая сигнал педали ускорения и скорость как непрерывное пространство проектирования, можно получить дискретный набор точек выборки в модуле выборки DOE.
Шаг 2. Принимая точки выборки в качестве входных параметров, в качестве переменной проектирования оптимизации и максимальную эффективность управления в качестве цели оптимизации, оптимальное значение для каждой точки выборки будет получено модулем оптимизации эффективности.
Шаг 3. На основе данных оптимизации, полученных в модуле оптимизации эффективности, создайте модель эффективности, в которой используется метод поверхности отклика. Что касается модели эффективности, и рассматриваются как входы, а оптимальное значение рассматривается как выход.
3.2.2. Выборка DOE для пространства проектирования с непрерывным вводом
Как видно из рисунка 4, когда заданы скорость и крутящий момент двигателя, мы можем вычислить КПД в этой точке с помощью карты КПД двигателя. Следовательно, мы берем скорость автомобиля и сигнал педали ускорения в качестве входного расчетного пространства, которое можно вывести по скорости и крутящему моменту двигателя. Учитывая ограничение скорости транспортного средства на скоростной автомагистрали, максимальная скорость транспортного средства модели эффективности ограничена до 120 км / ч, а сигнал педали ускорения находится в диапазоне от 0 до 1.Тогда пространство проектирования с непрерывными входами может быть дискретным, как показано на рисунке 8.
Для повышения точности прогнозирования модели эффективности и оценки ожидаемого коэффициента распределения в этой статье было отобрано 3000 точек в пространстве дизайна (см. Рисунок 8). ) с использованием метода оптимизации латинского гиперкуба (Opt LHD). Opt LHD может сделать распределение точек отбора проб более равномерным и лучше заполнять пространство, чем другие методы экспериментального проектирования [19].
3.2.3. Оптимизация и анализ коэффициента распределения тягового усилия
Из (9) мы можем видеть, что распределенный коэффициент имеет линейную зависимость с крутящим моментом каждого двигателя. И, как показано на рисунке 4, расчет КПД в основном представляет собой проблему с одним пиком. Поэтому в процессе вычисления оптимизации применяется метод Хука-Дживса, который хорошо подходит как для линейных, так и для нелинейных проектных пространств. Кроме того, этот подход представляет собой метод прямого поиска и имеет высокую скорость сходимости [20].
Учитывая точку в пространстве конструкции, оптимальный коэффициент распределения тягового усилия может быть получен путем максимизации общей эффективности системы трансмиссии, показанной в (11). На рисунке 9 показаны результаты оптимизации коэффициента распределения. Чтобы дополнительно проанализировать результаты оптимизации, мы разделим пространство дизайна на три области, используя три цвета в соответствии с общими характеристиками на рисунке 9, как показано на рисунке 10.
В соответствии с результатами разделения области дизайна, мы перерисовали результаты оптимизации коэффициента распределения с использованием трех цветов, как показано на рисунках 11 и 12.Исходя из приведенных выше результатов, мы можем создать модель эффективности с тремя зонами. Первая область — синяя, где коэффициент распределения равен 1; то есть работают только моторы передней оси. Вторая область — красная, где коэффициент распределения равен 0,5, что означает, что каждый двигатель выдает равный крутящий момент. Третья область — зеленая, где мы должны представить модель поверхности отклика для прогнозирования коэффициента распределения на основе сигнала педали ускорения и скорости автомобиля.
3.2.4. Дизайн модели эффективности
Как обсуждалось выше, модель прогнозирования была предложена с использованием подхода RSM (модель поверхности отклика). Приближение RSM основано на полиномиальной аппроксимации с помощью регрессии выходных параметров по методу наименьших квадратов к входным параметрам. Здесь входными параметрами являются сигнал педали ускорения и скорость автомобиля, а выходным параметром является коэффициент распределения. RSM, полученный из данных оптимизации, можно выразить следующим образом:
3.3. Нижний уровень
Основная цель нижнего уровня — обеспечить продольную устойчивость транспортного средства и получить разумный крутящий момент, необходимый для каждого распределения двигателей.
3.3.1. Состояние переключения
Нижнему уровню необходимо оценить состояние движения, чтобы реализовать переключение стратегии. Как мы все знаем, согласно кривым зависимости коэффициента сцепления от коэффициента скольжения шин, если коэффициент скольжения ниже 15–20%, автомобиль будет находиться в обычном режиме движения.Напротив, автомобиль будет находиться в режиме противобуксовочной системы. Итак, условие переключения определяется как коэффициент скольжения, превышающий 15%; то есть, если коэффициент скольжения ниже 15%, это в общем случае вождения и модель эффективности работает; в противном случае будет активирован алгоритм управления скользящим режимом для обеспечения безопасности вождения.
3.3.2. Алгоритм управления скользящим режимом
Когда транспортное средство движется в аварийном случае, то есть при коэффициенте скольжения не ниже 15–20%, если выходной тяговый момент все еще соответствует требуемому тяговому моменту, колесо будет чрезмерно вращаться.Для обеспечения безопасности вождения следует ограничить тяговый момент, и в таких обстоятельствах следует использовать стратегию управления скользящим режимом.
Стратегия управления скользящим режимом направлена на то, чтобы контролировать коэффициент скольжения колеса до 16%, за счет чего будет достигнута максимальная адгезионная характеристика. Функцию переключения можно выразить следующим образом: где — целевое значение коэффициента скольжения, равное 16%; — весовой параметр, обозначающий значение наклона скользящей кривой.
Закон достижения определяется как где обозначает скорость достижения.
Взяв производную от (13), мы можем дать
Взяв производную от (2), получаем
Подстановка (16), (1) и (14) на (15) дает
3.3.3. Требования к крутящему моменту для каждого блока распределения двигателя
Если значение коэффициента скольжения выше 15% на основе крутящих моментов двигателя, предварительно заданных в модели эффективности, условие переключения удовлетворяется и будет активирована стратегия управления скользящим режимом.В этом случае значение предварительного распределения крутящего момента будет регулироваться на основе контроллера скользящего режима и принципа равного крутящего момента колес на одной оси. Затем команда распределения крутящего момента каждого двигателя будет соответственно передана на двигатели.
4. Результаты моделирования и анализ
Исследования по моделированию были проведены для проверки предложенной стратегии управления в предположении, что транспортное средство движется по прямой дороге без уклона дороги.
4.1. Анализ имитационного моделирования для модели эффективности
На рисунках 13, 14 и 15 показаны результаты моделирования модели эффективности в сравнении со стратегией равномерного распределения (коэффициент распределения равен 0,5) для общего дорожного сценария по NEDC (новый европейский ездовой цикл). ) условие. На рисунке 13 показано, что фактический следующий DC (цикл движения) в моделировании хорошо согласуется с NEDC, за исключением того, что есть небольшая ошибка отслеживания в высокоскоростной секции, но это не влияет на анализ результатов моделирования. .
Рисунок 14 иллюстрирует мгновенную общую мощность и результаты улучшения общего энергопотребления. Результаты моделирования на рисунке 14 показывают, что предлагаемая модель эффективности может снизить общую мощность и общее потребление энергии по NEDC, особенно в высокоскоростной зоне.
На рисунке 15 показан общий контраст эффективности и сигнал педали ускорения по NEDC. Результаты моделирования показывают, что общая эффективность была улучшена в рамках стратегии управления моделью эффективности.Эффект в высокоскоростной зоне ездового цикла очевиден, поскольку коэффициент распределения отличается от 0,5 в основном в этих областях. Кроме того, как показано на Рисунке 15, сигнал педали акселератора в основном ниже 0,5, что соответствует реальной ситуации вождения.
Для проверки модели поверхности отклика, в которой сигнал педали ускорения больше 0,5, было проведено моделирование ускорения за 30 секунд до 120 км / ч. Как показано на рисунках 16, 17 и 18, результаты моделирования аналогичны результатам для NEDC.Мгновенное потребление мощности и энергии при стратегии управления моделью эффективности ниже, чем при стратегии равномерного распределения, а общая эффективность также выше. Кроме того, сигнал педали ускорения находится между интервалом 0,5 и 0,7, в котором поверхностная модель отклика модели эффективности срабатывает примерно через 5 секунд.
В таблице 3 приведены результаты моделирования улучшения экономии энергии. По сравнению со стратегией равномерного распределения предложенная стратегия управления моделью эффективности может снизить потребление энергии в 2 раза.3% в случае NEDC и на 1,1% в случае ускорения 0 ~ 120 км / ч. Общая средняя эффективность составляет 81,12% при стратегии равномерного распределения и 81,89% при модели эффективности по NEDC. И общая средняя эффективность при модели эффективности в случае ускорения также выше, чем при стратегии равномерного распределения, как показано в таблице 3. Таким образом, стратегия управления моделью эффективности может улучшить экономию энергии по сравнению со стратегией равномерного распределения.
| |||||||||||||||||||||||||||||||||||||||
4.2. Имитационный анализ алгоритма управления скользящим режимом
4.2.1. Параметры моделирования дороги
Пиковый коэффициент сцепления на каждом колесе представляет условия сцепления с дорогой.В этой статье устанавливаются параметры поверхности на каждом колесе различных дорожных покрытий, как показано на рисунке 19. Коэффициенты сцепления дороги с высоким сцеплением, низкой адгезией и однородной поверхностью постоянны, а коэффициенты совместной дороги представляют собой поверхность с изменением ступени сцепления.
4.2.2. Результаты моделирования и анализ
На рисунке 20 показаны результаты моделирования стратегии управления скользящим режимом на объединенной поверхности дороги, состоящей из трех участков. Как показано на Рисунке 19, коэффициенты сцепления участков дороги равны 0.1, 0,4 и 0,05 последовательно. Сначала по дороге едет электромобиль с распределенным приводом, сцепление которого составляет 0,1. Когда коэффициент скольжения превышает 15%, работает стратегия управления скользящим режимом, и коэффициент скольжения приближается к 16%. В то время как транспортное средство движется с первого участка дороги на второй участок дороги, сцепление которого составляет 0,4 на четвертом втором участке, коэффициент скольжения ниже 15%. Затем стратегия управления в скользящем режиме завершается, и распределение крутящего момента двигателя соответствует стратегии управления в режиме КПД.Поскольку транспортное средство повторно въезжает на дорожное покрытие с низким сцеплением на двенадцатую секунду, а коэффициент скольжения превышает 15%, возобновляется стратегия управления в режиме скольжения, и коэффициент скольжения также приближается к 16% в соответствии с заданным значением.
5. Выводы
(1) Была изучена стратегия контроля тяги, включая стратегию контроля модели эффективности для общего сценария дорожного покрытия и стратегию контроля скользящего режима для сценария аварийного контроля противоскольжения.(2) Было проведено несколько экспериментов по моделированию для проверки стратегии управления моделью эффективности на общем сценарии дорожного покрытия. Результаты моделирования показали, что стратегия управления моделью эффективности может улучшить экономию топлива транспортного средства по сравнению со стратегией равномерного распределения крутящего момента. Это может снизить потребление энергии на 2,3% в ситуации NEDC и на 1,1% в случае ускорения 0 ~ 120 км / ч на постоянном токе в соответствии с предложенной стратегией управления моделью эффективности. (3) Ориентация на сценарий аварийного вождения, стратегия управления скользящим режимом был проанализирован на стыке дорожного покрытия.Результаты моделирования показывают, что коэффициенты скольжения предпочтительно регулировались на уровне 16% для различных случаев изменения сцепления с дорожным покрытием.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Благодарность
Эта работа была поддержана Национальным фондом естественных наук Китая (51175043).
Наблюдение за весом — понимание переноса веса и динамики гоночного автомобиля
Распределение роликового пары определяет, куда переносится вес, спереди или сзади.сзади, при прохождении поворотов. Повышение сопротивления качению задней части приводит к тому, что большая часть веса переносится на задние колеса.Большинство из нас понимают, что шины создают сцепление за счет трения между молекулами резины в пятне контакта шины с поверхностью дороги. И большинство из нас понимает, что тяга увеличивается с увеличением вертикальной нагрузки на шину, поэтому аэродинамическая прижимная сила работает так хорошо. Кроме того, мы понимаем, что шина будет иметь большее сцепление с дорогой, если все пятно контакта будет равномерно нагружено, поэтому мониторинг температуры шины полезен.В основе этих базовых знаний лежат заблуждения и дезинформация, которые могут добавить путаницы в и без того сложную тему. Посмотрим, сможем ли мы пролить свет на эту тему.
Мы не будем рассматривать дизайн или конструкцию шин, поскольку никто из моих знакомых в любом случае не может изменить эти параметры. Начнем с факторов в шине, которые влияют на сцепление с дорогой. Это единственные факторы, влияющие на тягу в шине:
- Базовая конструкция и конструкция шины
- Жесткость боковины
- Резиновая смесь протектора
- Рисунок протектора
- Размер резины
Размер шин, состав и, возможно, дизайн протектора — единственные варианты, которые у нас есть, и они ограничены.
Есть еще факторы, которые мы контролируем. К ним относятся:
- Давление в шинах
- Развал шин
- Схождение шин (наруж)
- Изменение развала колес
Каждый из этих элементов имеет оптимальную настройку, которая позволяет шине создавать максимальное сцепление с дорогой при заданном наборе обстоятельств на данном автомобиле.
Затем есть вертикальная нагрузка на шину, которую очень важно понять, но также и наиболее неправильно понимаемый элемент сцепления шины.Сцепление увеличивается по мере увеличения вертикальной нагрузки на шину. Но очень важно понимать, что соотношение между вертикальной нагрузкой и тягой составляет , а не линейно. Нелинейность означает, что если нагрузка на шину увеличивается, а тяговое усилие также увеличивается, оно увеличивается не так сильно, как нагрузка. Это подходящее время для более четкого объяснения тяги с точки зрения силы в фунтах и вертикальной нагрузки на шину.
Один из способов оценить тягу — это фунты силы.Самый удобный способ сделать это — посмотреть на всю машину в целом и измерить силу, создаваемую шинами. Большинство энтузиастов автомобильных характеристик слышали термин «сила перегрузки». Если автомобиль разгоняется на 1 г, а его вес составляет 3000 фунтов, то шины создают тяговое усилие в 3000 фунтов. Это касается ускорения вперед, торможения (отрицательное ускорение) и прохождения поворотов (поперечное ускорение).
Автомобиль с «хорошими управляемыми характеристиками» может развить силу на повороте около 0.99 г в повороте, около 1,01 г при торможении и где-то около 0,50 г при разгоне на первой передаче. Для автомобиля весом 3500 фунтов при повороте при 0,99 г тяговое усилие в фунтах составляет 3465 фунтов (3500 x 0,99 = 3465). Это большая сила от этих четырех пятен контакта шин. Установите шину DOT с R-образным составом на тот же автомобиль и увеличьте это усилие до 1,05 г силы поворота.
Вертикальная нагрузка — это нагрузка, фактически наблюдаемая в пятне контакта шины. Это включает в себя вес, приходящийся на пятно контакта шины , плюс любую аэродинамическую прижимную силу.Если автомобиль создает какой-либо аэродинамический подъем, то вертикальная нагрузка на шину будет меньше, чем вес на шину, поскольку автомобиль поднимается, а не опускается. Аэродинамическая прижимная сила хороша, потому что она увеличивает тягу , а не увеличивает вес автомобиля. Давайте посмотрим на это более внимательно, поскольку это еще одна область некоторой путаницы.
Downforce — это в значительной степени халява от тяги. Это немного требует ускорения на высоких скоростях и несколько снижает максимальную скорость, но не добавляет веса автомобилю.Увеличение веса автомобиля фактически снижает относительное тяговое усилие по сравнению с общим весом автомобиля. Например, предположим, что автомобиль массой 3000 фунтов развивает предельное усилие на повороте в 3000 фунтов. Это 1 грамм боковой силы.
Допустим, мы добавили машине 500 фунтов без каких-либо изменений, включая распределение веса. Легко понять, что автомобиль не будет ускоряться так быстро, потому что он весит больше, а мощность двигателя такая же. Менее очевидно, что скорость на поворотах снизится.Вот почему. 500 фунтов веса добавляют 500 фунтов вертикальной нагрузки к шинам, но поскольку соотношение между увеличением вертикальной нагрузки и увеличением тяги составляет , а не линейных, величина увеличения тяги будет только около 400 фунтов.
Это означает, что теперь шины обеспечивают дополнительные 400 фунтов тяги (400 x 1 г), что в сумме дает 3400 фунтов тяги. Таким образом, сила поворота составляет всего 0,97 г. Это равносильно потере скорости на поворотах из-за воздействия только на шины, а не на динамику подвески.Это полностью связано с характеристиками шин, в которых тяговое усилие не увеличивается так быстро, как нагрузка. Эта нелинейная зависимость также становится более значительной по мере приближения к расчетной нагрузке шины.
Другими словами, если шина имеет максимальную грузоподъемность 2000 фунтов, но обычно выдерживает только 750 фунтов, удвоение нагрузки до 1500 приближается к расчетному пределу. Здесь тяга может увеличиться только примерно на половину дополнительной нагрузки. Если расчетная нагрузка будет превышена, ситуация ухудшится.Хотя на самом деле вы ничего не можете сделать с шиной или подвеской, чтобы изменить эту нелинейную зависимость, есть множество факторов, которые вам необходимо понять, чтобы минимизировать ее влияние и позволить вашему автомобилю создать максимально возможное сцепление с дорогой.
Эти факторы имеют решающее значение для обеспечения максимального сцепления с дорогой для каждой отдельной шины:
- Угол развала передних колес
- Развал сзади для автомобилей с независимой или регулируемой задней подвеской
- Давление в каждой шине
- Настройки носка спереди и сзади; прямоугольность оси или картера моста на вагонах с неразрезной осью
- Рулевое управление и перпендикулярность оси сзади
- Отбойник рулевого управления
НАШИВКА ДЛЯ КОНТАКТА ШИНЫ
Более крупное пятно контакта шины при прочих равных означает большее тяговое усилие, но большее не всегда означает быстрее.Иногда более широкая шина работает медленнее, потому что она слишком сильно увеличивает сопротивление качению и / или потому, что подвеска не может эффективно контролировать пятно контакта шины (изменение развала и т. Д.). Какой бы размер шины вы ни использовали, важно, чтобы на вас работало как можно больше пятна контакта с шиной.
Единая цель в каждом случае состоит в том, чтобы весь контакт шины был равномерно нагружен по поверхности пятна контакта. Если все пятно контакта нагружено неравномерно, вы не получаете всей возможной тяги от этой шины.Если вы посмотрите на пятно контакта шины как на серию квадратов размером в один дюйм, то один квадрат по сравнению с другим действует так же, как одна шина по сравнению с другой шиной. Уменьшение нагрузки на одну клетку увеличивает нагрузку на другую. Квадрат, теряющий нагрузку, теряет сцепление быстрее, чем другой квадратик получает тягу из-за увеличенной нагрузки. Другими словами, пятно контакта шины в целом обеспечивает меньшее сцепление с дорогой, чем могло бы быть, если бы пятно контакта было равномерно нагружено по всей своей площади.
Когда все пятно контакта шины на каждом углу работает с максимальным тяговым потенциалом, цель состоит в том, чтобы все четыре шины создавали максимальное возможное сцепление с дорогой для всего транспортного средства.Чтобы добиться этого, вы должны понимать перенос веса. На тягу влияют многие факторы, такие как характеристики конструкции, дизайн, пиковые углы скольжения и состояние гусеницы. Вещи, в некоторой степени контролируемые командой, такие как распределение веса и настройка шасси, имеют решающее значение в управляемости. В автоспорте команда, наилучшим образом использующая потенциальное сцепление всех четырех шин, — это команда, у которой больше шансов ехать быстрее или победить.
УГОЛ ШИНЫУгол скольжения шины, который на самом деле представляет собой величину скручивания боковины шины, из-за которой пятно контакта шины поворачивается на меньший угол, чем осевая линия колеса — разница в угле скольжения — определяет поперечную силу шины.При заданном угле скольжения шина будет создавать максимальное усилие на повороте. При меньшем угле скольжения шина будет создавать меньшую силу на повороте, и то же самое верно при больших углах скольжения. Задача водителя — удерживать шину под оптимальным углом скольжения для обеспечения максимальной силы поворотов в любое время в повороте — непростая задача. Углы скольжения передних шин по сравнению с углами скольжения задних шин определяют управляемость автомобиля. Если они равны, машина нейтральна. Если передние углы скольжения больше задних, автомобиль будет толкать или испытывать недостаточную поворачиваемость.Если задние колеса больше, автомобиль будет болтаться или поворачиваться с избыточной поворачиваемостью.
Если передние углы скольжения больше задних, автомобиль будет толкать или испытывать недостаточную поворачиваемость. Если задние колеса больше, автомобиль будет болтаться или иметь избыточную поворачиваемость. ОБЩАЯ ВЕСЗажигалка лучше. Для соревнований в большинстве классов действуют правила минимального веса. Вы хотите иметь минимальный вес. Если нет правила минимального веса, бегайте как можно легче. Минимальный вес важен по двум причинам.Во-первых, двигатель должен разогнать лишний вес. Во-вторых, фактор, который мы рассмотрели выше, — сцепление шины с вертикальной нагрузкой на шину. Если вы добавите к машине 500 фунтов для улучшения управляемости, вы увеличите нагрузку на шину на 500 фунтов, но лишь около 450 фунтов дополнительной тяговой силы. Это делает автомобиль медленнее при торможении и поворотах. Это не лучший компромисс.
Если вы добавите к машине 600 фунтов для улучшения управляемости, вы увеличите рабочую нагрузку шины на 600 фунтов, но лишь примерно на 510 фунтов дополнительной тяговой силы.Это делает автомобиль медленнее при торможении и поворотах. Это не лучший компромисс. ПЕРЕДАЧА ВЕСАВо время поворота вес переносится изнутри наружу, при торможении сзади на перед и при ускорении спереди назад. Перенос веса ухудшает общую тягу автомобиля. В поворотах вес перемещается с внутренних шин на внешние. Это изменяет вертикальную нагрузку на все четыре колеса.
Внутренние шины теряют вертикальную нагрузку, в то время как внешние шины получают вертикальную нагрузку.Внутренние шины теряют сцепление, в то время как внешние шины набирают силу. Пока что звучит нормально. Но помните, что соотношение между вертикальной нагрузкой на шину и силой тяги этой шины составляет , а не линейно. Вес, исходящий от внутренних шин, заставляет их терять сцепление быстрее, чем внешние шины приобретают сцепление с новой найденной дополнительной вертикальной нагрузкой. Таким образом, общее чистое тяговое усилие шин уменьшается по сравнению с той же ситуацией, если не происходит переноса веса. Поскольку невозможно исключить перенос веса в повороте, мы, по крайней мере, хотим минимизировать его, чтобы общее сцепление с дорогой оставалось как можно более высоким.
При торможении происходит то же самое, но менее выражено. При ускорении на заднеприводном автомобиле перенос веса фактически помогает ускорить автомобиль, потому что ведущие колеса набирают тягу, в то время как шины, теряющие сцепление, не управляют автомобилем — и наоборот, для автомобиля с передним приводом. Несмотря на то, что мы получаем некоторое ускорение от большего переноса веса, если вам нужно повернуть и замедлить движение в поворотах, перенос веса ухудшает время круга, поэтому наша цель — максимально снизить перенос веса.
Есть только четырех факторов, которые влияют на количество переносимого веса. Больше ничего не влияет на величину переноса веса.
- Общий вес автомобиля — больший вес означает больший перенос веса при прочих равных
- Сила, действующая на центр тяжести — чем больше сила, тем больше переносится вес
- Высота центра тяжести над землей — более высокие центры тяжести переносят больший вес
- Ширина колеи (для прохождения поворотов) или колесная база (для ускорения и торможения) — меньшая ширина колеи или более короткая колесная база означают большую передачу веса
Давайте подробнее рассмотрим каждый из них.Мы уже обсуждали общий вес. Поскольку мы хотим бегать как можно легче или с минимальным весом, это постоянный фактор, который мы не можем изменить, если не внесем серьезные изменения в транспортное средство. Сила тяги шин определяет силу, действующую в центре тяжести. Уменьшение тяги или движение ниже пределов сцепления шин, безусловно, противоречат нашей цели — как можно быстрее объезжать трассу, поэтому, опять же, это не тот фактор, который мы хотим использовать.
Максимальная ширина колеи всегда устанавливается правилами соревнований или практическими соображениями, и, если вы не бежите на очень высоких скоростях, когда аэродинамическое сопротивление является большим фактором, вы хотите использовать колею с максимально возможной шириной, так что это опять же не контролируемый фактор. .
Однако можно изменить центр тяжести, точку внутри автомобиля, в которой он, если бы он был подвешен в этой точке, находился бы в идеальном равновесии. Может быть, немного на некоторых машинах, но достаточно, чтобы повлиять на производительность. Простое поддержание минимально возможного веса в автомобиле снизит центр тяжести, тем самым уменьшив перенос веса. Это очень важно учитывать при изменении подвески и опускании автомобиля, что также снижает центр тяжести.
Есть много неправильных представлений о переносе веса.Только четыре перечисленных пункта влияют на величину переноса веса. Крен тела имеет минимальный эффект и не должен считаться фактором. Прыжки и приседания не являются факторами. Нет и фазы луны. Поэтому не заблуждайтесь, полагая, что что-либо, кроме четырех перечисленных факторов, влияет на величину переносимого веса при прохождении поворотов, торможении или ускорении.
РАСПРЕДЕЛИТЕЛЬНАЯ МУФТАПара валков — это общее сопротивление качению в автомобиле.Сопротивление качению создается пружинами и стабилизаторами поперечной устойчивости. Более жесткие пружины и стабилизаторы поперечной устойчивости уменьшают крен кузова. Крен кузова не обязательно является плохим сам по себе, но он вызывает некоторую динамику в машине, которая может ухудшить управляемость и общие характеристики. Наиболее существенными проблемами являются повышенное изменение развала колес и аэродинамика.
Изменение развала приводит к неравномерной нагрузке пятна контакта шины с поверхностью шины, вплоть до того, что часть пятна контакта шины теряет контакт с дорогой.Для противодействия этому требуется более отрицательный развал, который может вызвать ту же проблему при прямолинейном торможении — часть пятна контакта не находится в плотном контакте с дорогой. Уменьшение крена тела уменьшит этот эффект. Говоря аэродинамически, крен спереди позволяет большему количеству воздуха под частью автомобиля, вызывая аэродинамический подъем и увеличивая аэродинамическое сопротивление. Это важный фактор для серийных автомобилей для соревнований, который ухудшается по мере увеличения скорости.
Изменение развала приводит к неравномерной нагрузке пятна контакта шины с поверхностью шины, вплоть до того, что часть пятна контакта шины теряет контакт с дорогой.Крен кузова возникает при повороте автомобиля. Перенос веса не вызван креном тела, и уменьшение крена тела не уменьшает перенос веса. Перенос веса в повороте происходит даже при нулевом крене кузова, даже при отсутствии подвески на транспортном средстве, как у картинга.
Перенос веса не вызван креном тела, и уменьшение крена тела не уменьшает перенос веса. Перенос веса в повороте происходит даже при нулевом крене кузова, даже при отсутствии подвески на транспортном средстве, как у картинга.Если пара валков — это общая величина сопротивления качению кузова, обеспечиваемая пружинами и стабилизаторами поперечной устойчивости как спереди, так и сзади, распределение роликовых пар — это величина сопротивления качению спереди по отношению к величине сзади.Изменение баланса распределения валковой пары автомобиля изменяет баланс управляемости автомобиля. Если мы увеличим сопротивление переднему крену, баланс управляемости изменится. Если перед переключением автомобиль находился в нейтральном положении, теперь будет недостаточная поворачиваемость. Если перед изменением поворачиваемость автомобиля была недостаточной, то недостаточная поворачиваемость будет больше. Если он чрезмерно поворачивается, он будет меньше поворачиваться после изменения. Обратный эффект происходит в задней части, где увеличение сопротивления качению сзади увеличивает избыточную поворачиваемость или уменьшает недостаточную поворачиваемость. Сопротивление качению можно увеличить, увеличив жесткость пружины или жесткость стабилизатора поперечной устойчивости, либо и то, и другое.Это делает изменения сопротивления качению ключом к нахождению идеального устойчивого равновесия управления. Регулируемые стабилизаторы поперечной устойчивости позволяют точно настроить распределение пары валков, что значительно упрощает настройку.
Сопротивление качению можно увеличить, увеличив жесткость пружины или стабилизатора поперечной устойчивости, либо и то, и другое. Это делает изменения сопротивления качению ключом к нахождению идеального устойчивого равновесия управления.В то время как крен кузова не связан напрямую с величиной передачи веса во время поворота, распределение роликового пары определяет, где переносится вес, спереди или сзади.сзади, при прохождении поворотов. Увеличение сопротивления переднему качению заставляет большую часть общего веса переноситься на передние шины и меньше — на задние. Повышение сопротивления качению задней части приводит к тому, что большая часть веса переносится на задние колеса. Изменение нагрузки на шины, больше на одном конце и меньше на другом, — вот что меняет баланс управляемости. Это работает именно так, как и следовало ожидать, исходя из влияния вертикальной нагрузки на сцепление шин, о котором мы говорили ранее.
ТЯГОВОЙ КРУГКруг сцепления — это графическое представление сцепления шин с дорогой при прохождении поворотов, торможении и ускорении.Шины могут тянуться в любом направлении: вперед для ускорения, назад для торможения и вбок для прохождения поворотов. Молекулы резины в пятне контакта шины не знают и не заботятся о том, в каком направлении они работают. По этой причине вся сила сцепления шины может использоваться в одном направлении, или часть может использоваться для прохождения поворотов, а часть — для торможения или ускорения. Изучите прилагаемую иллюстрацию, чтобы полностью понять этот принцип.
Шины могут тянуться в любом направлении: вперед для ускорения, назад для торможения и вбок для прохождения поворотов.Молекулы резины в пятне контакта шины не знают и не заботятся о том, в каком направлении они работают. ВОДИТЕЛЬЧасто упускаемый из виду фактор динамики гоночного автомобиля, на самом деле главный фактор — это водитель. Драйвер управляет возникновением динамических событий в зависимости от того, когда драйвер использует один или несколько элементов управления. И драйвер определяет, по крайней мере частично, насколько быстро происходят динамические события, в зависимости от того, насколько быстро и резко драйвер использует элементы управления. Многие водители слишком резкие с управляющими сигналами и нарушают динамический баланс шасси, что ухудшает общие характеристики автомобиля.Термин «медленные руки», используемый многими гоночными инструкторами и тренерами, относится к мягкому рулевому управлению. Тот же фактор применяется к тормозам и дроссельным заслонкам.
НАЗАД К ПЕРЕДАЧЕ ВЕСАДавайте еще раз посмотрим на нашу основную тему: перенос веса. О гоночных автомобилях, их настройке и динамике движется так много дезинформации, что все это может сбивать с толку. Хотя концепция переноса веса достаточно проста — поскольку вы можете почувствовать это во время вождения, — влияние переноса веса на характеристики гоночного автомобиля совсем не простое.Во-первых, плохая информация.
Крен кузова или шасси влияет на перенос веса, а уменьшение крена кузова снижает перенос веса. Технически это действительно так, но влияние кувырка тела на перенос веса крошечное, возможно, менее 1 процента от общего. Таким образом, уменьшение крена тела даже на 100 процентов очень мало повлияет на перенос веса. Однако крен кузова имеет большое влияние на изменение развала и аэродинамику. Теперь о самом важном.
Влияние кувырка тела на перенос веса ничтожно, возможно, менее 1 процента от общего количества.Таким образом, уменьшение крена тела даже на 100 процентов очень мало повлияет на перенос веса.С точки зрения модификации автомобиля, максимально низкое расположение центра тяжести улучшит сцепление шин с дорогой за счет уменьшения передачи веса — так же, как и при беге с самой широкой шириной колеи в соответствии с вашими правилами. И, конечно же, уменьшение веса автомобиля до минимума также уменьшит перенос веса.
Далее идет раздача роликов. С точки зрения управления переносом веса не имеет значения, изменяете ли вы жесткость пружины или стабилизатора поперечной устойчивости.Имеет значение сопротивление переднему и заднему качению. Так что лучше, стабилизаторы поперечной устойчивости или пружины? Хороший вопрос. Это зависит от плавности трассы. Скорость пружин определяется — или должна определяться — неровностями поверхности гусеницы. Это делается путем расчета частот подвески. Следующий вопрос!
Что лучше: увеличить на одном конце или понизить на другом? Если все близко, и недостаточная / избыточная поворачиваемость не вызвана проблемой настройки, такой как давление в шинах или углы развала, то изменение должно быть довольно небольшим.Посмотрите на температуру шин, особенно на среднюю температуру шин. Если температура резиновой смеси на одном конце высока (спросите инженера вашей шинной компании), смягчите этот конец. Если один конец слишком холодный, сделайте его жестче.
АЭРОДИНАМИКАКак правило, если проблемы возникают при поворотах на малых скоростях, балансируйте валковую пару стержнями и пружинами. Если проблемы возникают только в скоростных поворотах, используйте аэродинамику. Но всегда сначала добивайтесь механического сцепления (сцепление шин на низкой скорости), а затем работайте над балансом на высоких скоростях в поворотах с аэродинамикой.
ТЕПЕРЬ, ЧТО ВЫ ПЕРЕГРУЖЕНЫЭто много для понимания, но если вы поработаете над основами, вы будете очень удивлены, насколько хорошо все это работает на самом деле. И работа здесь ключевое слово. На самом деле это требует много работы. Но для успеха на треке требуется серьезное обязательство, и все это является частью этого обязательства. Но это весело, так что продолжайте!
Мы обнаружили на YouTube это видео, в котором используется аквариум, наполненный водой, чтобы продемонстрировать эффекты переноса веса.
Мы нашли это видео от сотрудников Национального научного фонда, в котором также освещаются детали переноса веса.
.