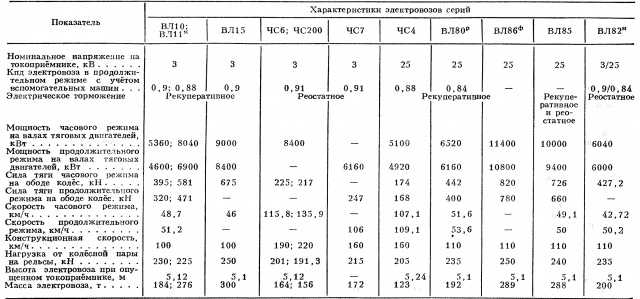
4. Тягово-динамические характеристики лесных машин
4.1. Тяговая характеристика автомобиля
Тяговой характеристикой называется зависимость свободной силы на ободе колеса от скорости движения машины :
. (4.1)
Свободная сила тяги определяется как
, (4.2)
где – касательная сила тяги;
–сила сопротивления воздушной среды.
Сила тяги зависит от передаточного числа трансмиссии (передаточного числа коробки передач, раздаточной коробки и ведущего моста). Поэтому на тяговой характеристике наносится ряд кривых, соответствующих передаточному числу трансмиссии на каждой из передач.
Общий вид графика тяговой характеристики приведен на рис. 4.
Из внешней скоростной
характеристики определяется значение
крутящего момента для каждого значения
частоты вращения коленчатого вала.
Момент, подводимый к ведущим колесам, определится из выражения
. (4.3)
Касательная сила тяги на ведущих органах колесных машин составит
. (4.4)
Сила сопротивления воздушной среды определится из уравнения (при скорости в км/ч)
, (4.5)
а свободная сила тяги
. (4.6)
При определении значения касательной силы тяги в таблицу результатов расчетов заносятся значения , , , и .
0
Va, м/с
Vmax
Pψ
Pa, Н
Pψ
Pψ + w
Pw
I
II
III
IV
Рис. 4. Тяговая характеристика
Параметры тяговой характеристики
n | Мк | ||||||||||||
* | * | * | |||||||||||
Va | Pк | Pw | Pa | Va | Pк | Pw | Pa | Va | Pк | Pw | Pa | ||
* Параметры
тяговой характеристики определяются
на всех передачах коробки передач.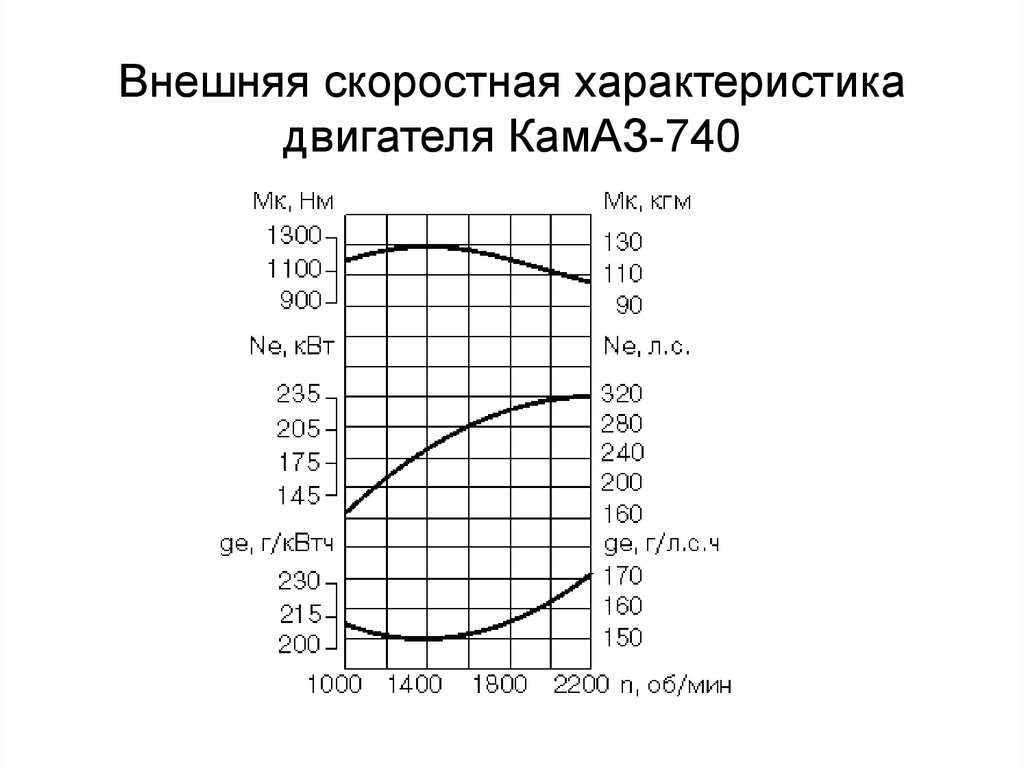
График тяговой характеристики, дополненный силами внешнего сопротивления, называется графиком тягового баланса.
4.2. Динамическая характеристика автомобиля
Использование графика тяговой характеристики в практических целях при сравнении машин с разными весовыми параметрами не всегда удобно, т. к. силы сопротивления движению в одинаковых условиях различны.
Сравнение тяговых свойств автомобилей удобнее проводить, используя динамическую характеристику, предложенную академиком Е. А. Чудаковым и представляющую собой графическую зависимость динамического фактора от скорости движения :
, (4.7)
где D– динамический фактор, определяемый свободной силой тяги, отнесенной к полной массе транспортной системы.
Таким образом, динамический фактор представляет собой свободную силу тяги, приходящуюся на единицу полного веса транспортной системы.
Особенно удобно
пользоваться динамической характеристикой
машины в случае установившегося движения,
т. е. при
.
е. при
.
Тогда
ψ, (4.8)
где ψ– коэффициент суммарного дорожного сопротивления.
Примерный график динамической характеристики представлен на рис. 5.
Рис. 5. Примерный график динамической характеристики автомобиля
На практике часто выполняют совмещенную тягово-динамическую характеристику машины с различными масштабами значений ипо оси координат.
Значение динамического фактора так же, как и свободной силы, больше на низших передачах вследствие увеличения касательной силыи уменьшения силы сопротивления воздуха.
Средние значения динамического фактора для различных типов автомобилей приведены в табл. 7.
Таблица 7. Значения динамического факторадля различных типов автомобилей
Тип автомобиля | Динамический фактор, D |
Легковые: микролитражные малого литража среднего и большого литража | 0,20÷0,25 0,25÷0,30 0,35÷0,50 |
Грузовые: малой грузоподъемности средней и большой грузоподъемности Автопоезда Автомобили высокой проходимости | 0,35÷0,45 0,30÷0,40 0,18÷0,25 0,60÷0,80 |
Тягово скоростные свойства автомобиля — Автомобили (Инженерия)
План лекции
6. 1. Тяговая сила и тяговая характеристика автомобиля
1. Тяговая сила и тяговая характеристика автомобиля
6.2. Тяговая характеристика автомобиля с дополнительной
коробкой передач
6.3. Скорость и ускорение автомобиля
6.4. Реакции дороги, действующие при движении на колеса автомобиля
6.5. Сила и коэффициент сцепления колес автомобиля
с дорогой
6.1. Тяговая сила и тяговая характеристика автомобиля
Тяговой силой называется отношение крутящего момента на полуосях к радиусу ведущих колес автомобиля. Это толкающая автомобиль сила, которая передается от ведущих колес к несущей системе (рама, кузов). При увеличении тяговой силы на ведущих колесах автомобиль может развивать большие ускорения, преодолевать более крутые подъемы, буксировать прицепы большей массы и иметь лучшие тягово-скоростные свойства.
Рекомендуемые материалы
Тяговая сила определяется экспериментально при испытаниях автомобиля или расчетным путем с использованием внешней скоростной характеристики двигателя по формуле
(6. 1)
1)
Из выражения (6.1) следует, что максимальное значение тяговой силы ограничено, поскольку оно определяется максимальными значениями момента двигателя Меи передаточного числа трансмиссии щ. Тяговая сила ограничена также вследствие действия силы сцепления между ведущими колесами и дорогой.
Рис. 6.1. Тяговая характеристика автомобиля со ступенчатой коробкой передач: I — IV — передачи
Рис. 6.2. Тяговые характеристики автомобилей с бесступенчатой (а) и гидромеханической (б) коробками передач: I, II — передачи
Изменение тяговой силы на ведущих колесах показывает тяговая характеристика автомобиля (рис. 6.1) — зависимость тяговой силы от скорости движения на различных передачах.
Характер изменения тяговой силы на ведущих колесах зависит от типа коробки передач в трансмиссии автомобиля. Так, механическая ступенчатая коробка передач обеспечивает ступенчатое изменение тяговой силы (см. рис.6.1), бесступенчатая — плавное (рис. 6.2, а), а гидромеханическая — и плавное, и ступенчатое (рис. 6.2, б).
6.2, а), а гидромеханическая — и плавное, и ступенчатое (рис. 6.2, б).
6.2. Тяговая характеристика автомобиля с дополнительной коробкой передач
Представленная на рис. 6.1 тяговая характеристика соответствует автомобилю ограниченной проходимости с колесной формулой 4 х 2, в трансмиссии которого установлена только механическая ступенчатая коробка передач и отсутствует дополнительная коробка передач. Однако в трансмиссии полноприводных автомобилей, тяжелых грузовых автомобилей и автомобилей-тягачей, работающих с прицепами и полуприцепами, кроме основной устанавливают еще и дополнительные коробки передач: делитель, демультипликатор или раздаточную коробку. Они позволяют улучшить тягово-скоростные свойства, повысить проходимость и топливную экономичность автомобиля.
Делитель (мультипликатор) представляет собой повышающую коробку передач. Он устанавливается перед основной коробкой передач и увеличивает число ее передач в 2 раза. Обычно он имеет две передачи: прямую с передаточным числом и = 1 и повышающую с и < 1.
Рис. 6.3. Тяговые характеристики автомобилей с дополнительными коробками передач:
а — с делителем; б — с демультипликатором; I—IV — передачи;———-включена повышающая передача;———-включена понижающая передача
Тяговая характеристика автомобиля с делителем представлена на рис. 6.3, а, где штриховыми линиями показано изменение тяговой силы на ведущих колес автомобиля при включенной повышающей передаче делителя. Из рисунка видно, что делитель не увеличивает передаточные числа коробки передач и тяговую силу на ведущих колесах, а только уменьшает разрыв между передаточными числами соседних передач и расширяет диапазон передач и значений тяговой силы.
Демультипликатор является понижающей коробкой передач. Он устанавливается за основной коробкой передач и увеличивает в 2—3 раза ее передаточные числа и количество передач. Он имеет две или три передачи: прямую с передаточным числом и = 1 и понижающие с и > 1.
На рис. 6.3, б приведена тяговая характеристика автомобиля с демультипликатором. Штрих-пунктирными линиями показано изменение тяговой силы при включенной понижающей передаче демультипликатора. Из тяговой характеристики следует, что демультипликатор увеличивает передаточные числа и количество передач, а также значения тяговой силы на ведущих колесах автомобиля, существенно расширяя их диапазон.
Раздаточная коробка представляет собой понижающую коробку передач. Она устанавливается в трансмиссии полноприводных автомобилей и увеличивает передаточные числа и количество передач коробки передач, а также тяговую силу на ведущих колесах автомобиля. В автомобилях со всеми ведущими колесами раздаточная коробка выполняет функции демультипликатора.
Тяговая характеристика автомобиля с раздаточной коробкой при включенной понижающей передаче раздаточной коробки имеет такой же вид, как у автомобиля с демультипликатором (см. рис. 6.3, б).
6.3. Скорость и ускорение автомобиля
Линейную скорость колеса, м/с, можно определить с помощью выражения
где rк — радиус колеса, м;
к — угловая скорость колеса, рад/с.
Скорость автомобиля при его прямолинейном движении равна линейной скорости колеса, т.е. v = vK.
Так как скорость автомобиля v обычно выражается в км/ч, а скорость колеса vK — в м/с, то для получения скорости автомобиля v в км/ч необходимо ввести переводной коэффициент 3,6. С учетом этого коэффициента скорость автомобиля, км/ч:
Аналогично при прямолинейном движении ускорение автомобиля равно линейному ускорению колеса:
(6.2)
6.4. Реакции дороги, действующие при движении на колеса автомобиля
При движении автомобиля его колеса могут катиться в различных режимах: тяговом, ведомом и тормозном. При этих режимах качения со стороны дороги на колеса действуют силы, называемые реакциями. Для определения их величины рассмотрим качение колеса автомобиля по жесткой (недеформируемой) дороге. Схема сил, действующих в этом случае на ведущее колесо, представлена на рис. 6.4.
6.4.
Силы Рхи Pz и момент М’ действуют на колесо со стороны автомобиля. Силы Rx и Rz действуют на колесо со стороны дороги и представляют собой ее реакции.
Рис. 6.4. Силы, действующие на ведущее колесо при качении по недефор-мируемой дороге: О — центр колеса
Рассмотрим указанные силы и момент.
Pz — вертикальная нагрузка на колесо, направленная вниз перпендикулярно поверхности дороги.
Рх— продольная сила, параллельная поверхности дороги. В зависимости от режима качения колеса она может быть направлена как в сторону движения автомобиля, так и в противоположную.
М’ — момент, подводимый к колесу от полуоси или тормозного барабана (тормозного диска). Иногда момент может быть равен нулю (не подводится к колесу). Момент считается положительным, если его направление совпадает с направлением вращения колеса, и наоборот.
Rz — нормальная реакция дороги, направленная вверх перпендикулярно поверхности дороги. Точка приложения нормальной реакции смещена относительно оси колеса на некоторую величину аш из-за большей деформации шины в набегающей на дорогу части, чем в сбегающей с дороги. Это подтверждает эпюра элементарных сил, действующих в месте контакта колеса с дорогой, для которых нормальная реакция является результирующей силой.
Rx — касательная реакция дороги. Это сила, которая действует в плоскости дороги и в зависимости от режима качения колеса может быть направлена в сторону движения автомобиля или в противоположную. Касательная реакция считается положительной, если она направлена в сторону движения, и наоборот.
Составим уравнение моментов относительно оси колеса:
(6.3)
где jк — момент инерции колеса относительно оси вращения. Из выражения (6.3) находим касательную реакцию дороги:
Обозначим отношение символом f и, выразив величину
— с помощью формулы (6.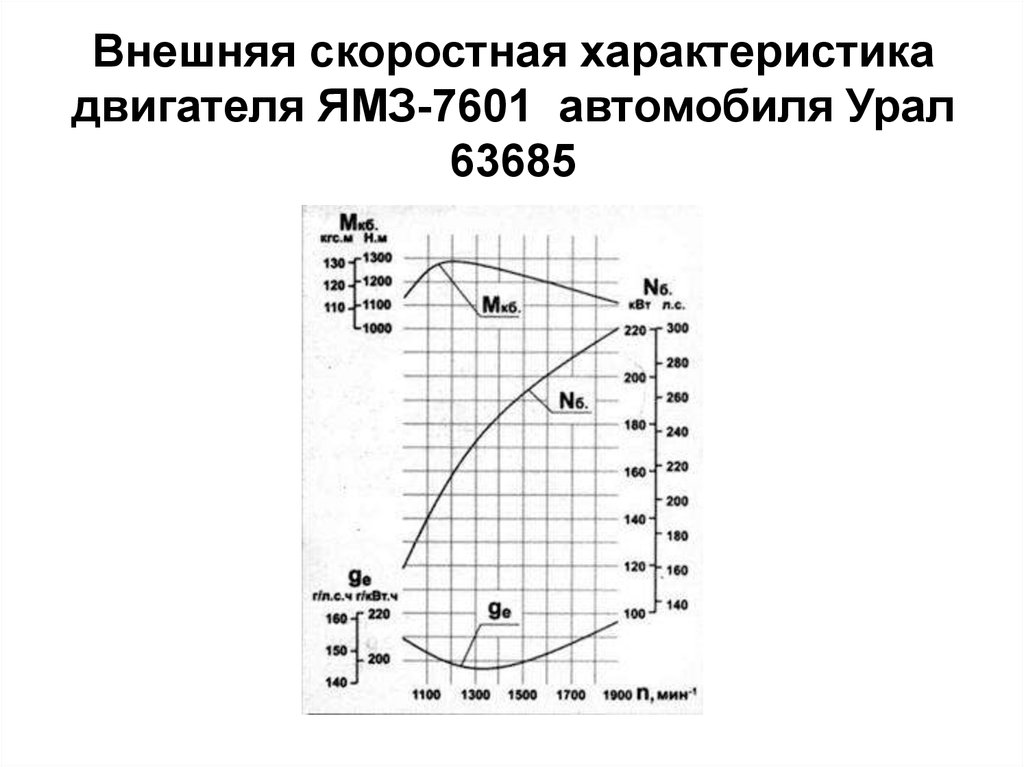 2) через ускорение автомобиля j,
2) через ускорение автомобиля j,
Для касательной реакции дороги получим в общем случае (при любых режимах качения колеса)
(6.4)
Рассмотрим типичные режимы качения колеса.
Тяговый режим характерен для ведущего колеса. Момент М’ подводится к колесу через полуось, и направление момента совпадает с направлением вращения колеса. В этом случае момент называется крутящим. Подставляя в выражение (6.4) вместо М’ выражение для крутящего момента Мк, подводимого к ведущим колесам, для ведущего колеса получим
где— тяговая сила.
Для ведущего колеса касательная реакция Rx > 0. Следовательно, она направлена в сторону движения, как показано на рис.6.4.
Ведомый режим характерен для ведомого колеса. Момент М’ к колесу не подводится, и, следовательно, он равен нулю. Для ведомого колеса касательная реакция дороги
Знак «-» показывает, что у ведомого колеса касательная реакция дороги направлена против движения (рис. 6.5, а).
6.5, а).
Рис. 6.5. Силы, действующие на ведомое (а) и тормозящее (б) колеса
при качении по недеформируемой дороге:
О — центр колеса
Тормозной режим является характерным для тормозящего колеса (ведущего, ведомого). Момент М’ подводится к колесу от тормозного барабана или тормозного диска и направление его противоположно направлению вращения колеса. В этом случае момент называется тормозным (Мтор). Подставив в выражение (7.4) вместо М’ тормозной момент (М’ = -Мтор), для тормозящего колеса получим
Знак «-» свидетельствует о том, что у тормозящего колеса касательная реакция дороги направлена против движения (рис. 6.5, б).
6.5. Сила и коэффициент сцепления колес автомобиля с дорогой
Значение тяговой силы, необходимой для движения, ограничено вследствие действия силы сцепления колес с дорогой.
Под силой сцепления понимают силу, противодействующую скольжению колеса относительно поверхности дороги. Она равна силе трения, возникающей в месте контакта колеса с дорогой.
Она равна силе трения, возникающей в месте контакта колеса с дорогой.
Сила сцепления
Рсц = Rzφ,
где Rz — нормальная реакция дороги; φ — коэффициент сцепления.
Равномерное качение колеса без скольжения и буксования возможно только при выполнении условия РТ < РсцЕсли тяговая сила
больше силы сцепления (Рт> Рси), то автомобиль движется с пробуксовкой ведущих колес. Это происходит, например, тогда, когда при движении по сухой дороге он попадает на участок со скользким покрытием. Если же автомобиль стоял на месте, то не только движение, но и его трогание с места невозможны.
Коэффициент сцепления. Этот коэффициент во многом определяет значение силы сцепления. В зависимости от направления скольжения колеса относительно поверхности дороги различают коэффициенты продольного φ х и поперечного φ усцепления. Эти коэффициенты зависят от одних и тех же факторов, и можно считать, что они практически равны (φ х = φ у).
Эти коэффициенты зависят от одних и тех же факторов, и можно считать, что они практически равны (φ х = φ у).
На коэффициент продольного сцепления ц>хоказывают влияние многие конструктивные и эксплуатационные факторы. Он определяется экспериментально. Ниже приведены средние значения фх для различных дорог и состояний их поверхности:
Сухое Мокрое
Асфальтобетонное шоссе………………. 0,7…0,8 0,35…0,45
Дорога с щебенчатым покрытием …. 0,6…0,7 0,3…0,4
Грунтовая дорога………………………….. 0,5…0,6 0,2…0,4
Снег…………………………………………….. 0,2 0,3
Лед……………………………………………….. 0,1 0,2
Рассмотрим, как влияют различные конструктивные и эксплуатационные факторы на коэффициент продольного сцепления.
Тип и состояние покрытия дороги. На сухих дорогах с твердым покрытием коэффициент сцепления имеет наибольшее значение, так как в этом случае он обусловливается не только трением скольжения, но и межмолекулярным взаимодействием материалов колеса и дороги (механическим зацеплением). На мокрых дорогах с твердым покрытием коэффициент сцепления существенно уменьшается (в 1,5 — 2 раза) по сравнению с сухими дорогами, так как между колесом и дорогой образуется пленка из частиц грунта и воды. На деформируемых дорогах коэффициент сцепления зависит от внутреннего трения в грунте и сопротивления грунта срезу.
Рис. 6.6. Рисунки протектора шин:
а, б — дорожный; в, г — универсальный; д—з — повышенной проходимости
Рисунок протектора шины (рис. 6.6). Дорожный рисунок протектора обеспечивает наибольший коэффициент сцепления на дорогах с твердым покрытием, универсальный — на дорогах смешанного типа, а рисунок протектора повышенной проходимости — в тяжелых дорожных условиях и по бездорожью. По мере изнашивания рисунка протектора значение коэффициента сцепления уменьшается.
По мере изнашивания рисунка протектора значение коэффициента сцепления уменьшается.
Если Вам понравилась эта лекция, то понравится и эта — 19 Центроиды или подпорки.
Внутреннее давление воздуха в шине. При увеличении давления воздуха в шине (рис. 6.7, а) коэффициент сцепления сначала возрастает, а затем уменьшается.
Рис. 6.7. Зависимости коэффициента сцепления от давления воздуха в шине (а), скорости движения (б) и вертикальной нагрузки на колесо (в)
Скорость движения. При увеличении скорости движения (рис. 6.7, б) коэффициент сцепления сначала возрастает, а потом падает.
Нагрузка на колесо. Увеличение вертикальной нагрузки на колесо (рис. 6.7, в) приводит к незначительному уменьшению коэффициента сцепления.
Коэффициент сцепления существенно влияет на безопасность движения. Его недостаточно высокое значение вызывает многочисленные аварии и несчастные случаи на дорогах. Как показали исследования, по этой причине происходит 15% общего числа Дорожно-транспортных происшествий, а в неблагоприятные периоды года — около 70 %.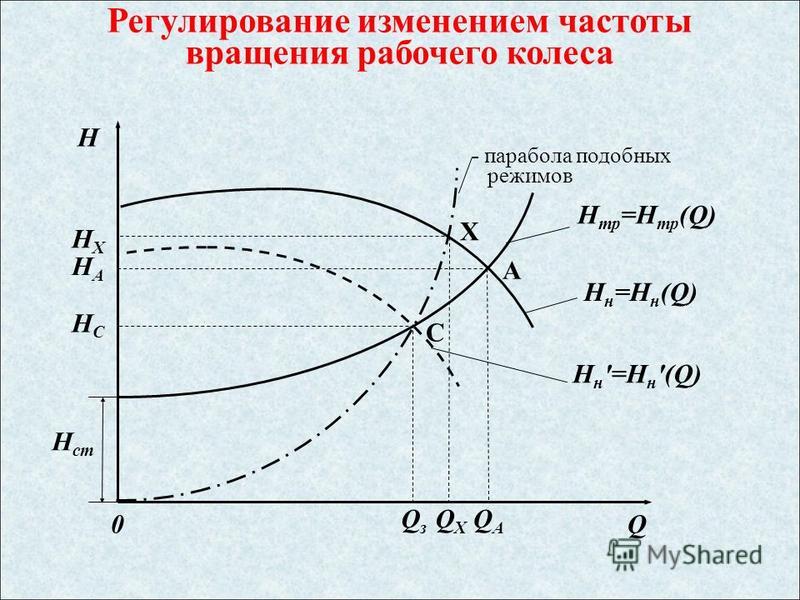 Исследованиями установлено, что для обеспечения безопасного движения значение коэффициента сцепления должно составлять не менее 0,4.
Исследованиями установлено, что для обеспечения безопасного движения значение коэффициента сцепления должно составлять не менее 0,4.
Исследование характеристик разности тяговых сил тележек с асимметричным управлением
На этой странице разработка нового типа конструктивно простых асимметричных радиальных тележек, что привело к предложению разностно-управляемых тяговых несимметричных радиальных тележек. Асимметричные радиальные тележки с разницей тяговых усилий, управляющие асимметричными радиальными тележками, называются TFDA-тележками, в которых разность продольных сил ползучести между передними и задними колесами вызывает радиальное управление обеими колесными парами. Концепция разности тяговых усилий включена в систему управления, а конструкция тележки также упрощена в виде асимметричных радиальных тележек. Датчики угла установлены для облегчения изменения электрических токов переднего и заднего тяговых двигателей для управления направляющим механизмом, чтобы колесные пары могли принимать радиальное положение.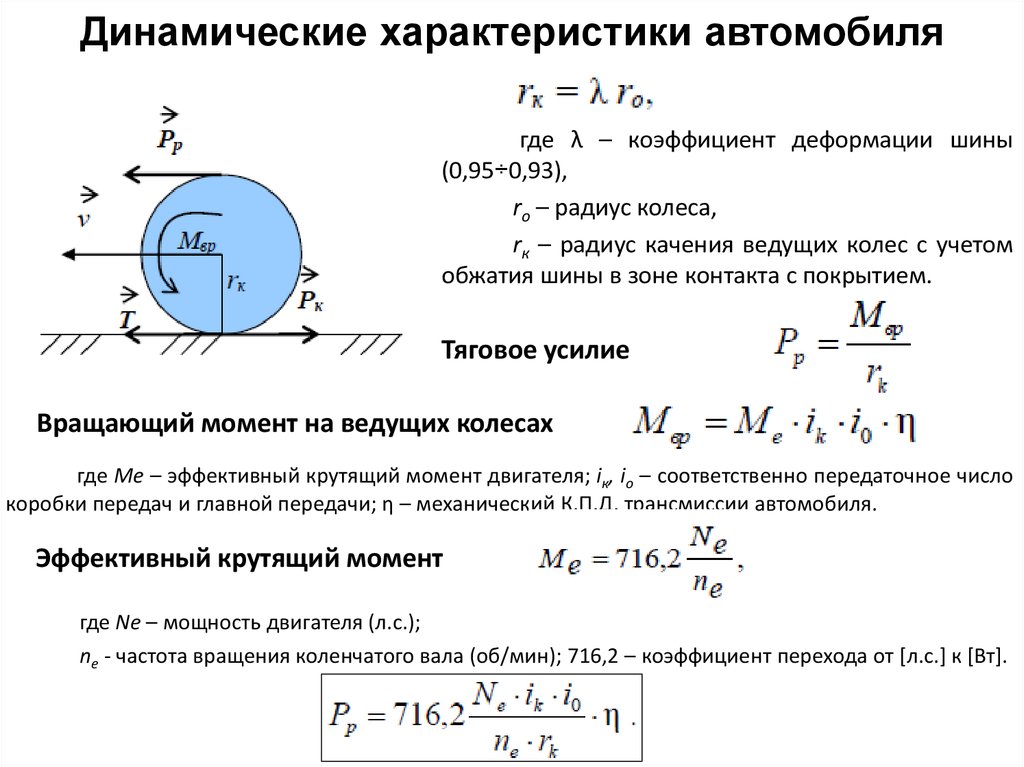 С SIMPACK, программным обеспечением для анализа динамики нескольких тел, настраиваются три полных модели транспортного средства с тележками TFDA, радиальными тележками и обычными тележками, и выполняется сравнительный анализ угла атаки ведущего колеса, поперечной силы ведущего колеса, мощности трения ведущего колеса, и полная мощность трения транспортного средства в условиях холостого хода и в условиях тяги соответственно. Результаты показывают, что тележки TFDA являются радиальными тележками с упрощенной конструкцией.
С SIMPACK, программным обеспечением для анализа динамики нескольких тел, настраиваются три полных модели транспортного средства с тележками TFDA, радиальными тележками и обычными тележками, и выполняется сравнительный анализ угла атаки ведущего колеса, поперечной силы ведущего колеса, мощности трения ведущего колеса, и полная мощность трения транспортного средства в условиях холостого хода и в условиях тяги соответственно. Результаты показывают, что тележки TFDA являются радиальными тележками с упрощенной конструкцией.
1. Введение
Одним из первых хорошо известных и успешных применений технологии радиальных тележек для тележек транспортных средств являются тележки Шеффеля [1], которые были введены в эксплуатацию в 1976 году в Южной Африке. Из-за технологической сложности первая радиальная тележка локомотива ДР-1 [2] не была успешно разработана до 1978 года. Самоуправляемые тележки [3], полностью зависящие от силы ползучести колеса и рельса, имеют худшие характеристики рулевого управления по сравнению с тележками с принудительным управлением [ 4]. Для разрешения противоречия между тяговым усилием и рулевым управлением появляются тележки с приводом от рыскания [5], среди успешных применений которых в настоящее время являются тележки с принудительным управлением с приводными двигателями, управляемые радиальные тележки, электромеханическое активное рулевое управление и устройства контроля устойчивости. Тележки с принудительным управлением с приводными двигателями, разработанными немецкой фирмой AEG, приводятся в действие гидроцилиндром для осуществления регулировки колесных пар по рысканию; горизонтальная длина гидроцилиндра регулируется для управления каждой колесной парой так, чтобы последняя могла принимать радиальное положение [6]. Хотя этот тип тележки еще не нашел практического применения, это новая идея применения современных технологий благодаря своей простой конструкции и функции рулевого управления, не зависящей от силы тяги. Приводные тележки [7] имеют принцип работы, аналогичный тележкам с принудительным управлением: привод, установленный на раме тележки, отвечает за перемещение радиального механизма, так что колесные пары могут принимать приблизительно радиальное положение в кривых.
Для разрешения противоречия между тяговым усилием и рулевым управлением появляются тележки с приводом от рыскания [5], среди успешных применений которых в настоящее время являются тележки с принудительным управлением с приводными двигателями, управляемые радиальные тележки, электромеханическое активное рулевое управление и устройства контроля устойчивости. Тележки с принудительным управлением с приводными двигателями, разработанными немецкой фирмой AEG, приводятся в действие гидроцилиндром для осуществления регулировки колесных пар по рысканию; горизонтальная длина гидроцилиндра регулируется для управления каждой колесной парой так, чтобы последняя могла принимать радиальное положение [6]. Хотя этот тип тележки еще не нашел практического применения, это новая идея применения современных технологий благодаря своей простой конструкции и функции рулевого управления, не зависящей от силы тяги. Приводные тележки [7] имеют принцип работы, аналогичный тележкам с принудительным управлением: привод, установленный на раме тележки, отвечает за перемещение радиального механизма, так что колесные пары могут принимать приблизительно радиальное положение в кривых. На 6-м Международном конгрессе локомотивов и тележек в 2005 году компания Bombardier представила динамические характеристики и последние разработки тележек «МЕХАТРОНИКА», которые имеют систему контроля устойчивости и активный электромеханический радиальный рулевой механизм. Линейные испытания показывают, что эта тележка может не только повысить комфорт и устойчивость, но и снизить уровень шума и износа. Однако его сложная структура и высокая стоимость производства препятствуют его продвижению на рынке.
На 6-м Международном конгрессе локомотивов и тележек в 2005 году компания Bombardier представила динамические характеристики и последние разработки тележек «МЕХАТРОНИКА», которые имеют систему контроля устойчивости и активный электромеханический радиальный рулевой механизм. Линейные испытания показывают, что эта тележка может не только повысить комфорт и устойчивость, но и снизить уровень шума и износа. Однако его сложная структура и высокая стоимость производства препятствуют его продвижению на рынке.
Эти активно управляемые радиальные тележки одновременно оснащены дополнительными двигателями в качестве исполнительных механизмов, поэтому в данной статье предлагается новая конструкция асимметричной радиальной тележки, управляемой и управляемой разницей тяговых усилий передней и задней колесных пар, которая проще и практичнее по сравнению с обычными тележки и традиционные радиальные тележки, как показано в сравнительном исследовании.
2. Направляющий механизм прохождения кривой
Во время прохождения кривой транспортное средство в основном управляется силами ползучести. С учетом вибрации стального рельса в точках контакта колеса с рельсом продольная ползучесть , поперечная ползучесть и крутильная ползучесть определяются следующим образом [8, 9].]:где , представляющие левую и правую точки контакта соответственно.
С учетом вибрации стального рельса в точках контакта колеса с рельсом продольная ползучесть , поперечная ползучесть и крутильная ползучесть определяются следующим образом [8, 9].]:где , представляющие левую и правую точки контакта соответственно.
Предположим, что стальной рельс находится в статическом состоянии, пренебрегая бесконечно малыми членами всех кинематических величин более высокого порядка; согласно методу синтеза кинематической скорости, (1) можно записать в другом виде [10]: где относится к углу крена колесной пары; угол рыскания колесной пары; боковое смещение колесной пары; угол контакта колеса с рельсом; — смещение точки контакта колеса с рельсом на беговой дорожке колеса; – мгновенный радиус качения колесной пары; номинальный радиус качения колесной пары; — поперечное расстояние между центральным положением колесной пары и номинальной окружностью качения колесной пары; – скорость движения колеса вперед; радиус кривой.
Теория ползучести [11, 12] показывает, что с увеличением угла атаки увеличивается боковая ползучесть колесной пары. В результате увеличиваются боковые силы проскальзывания между колесом и рельсом, что приводит к возможному боковому смещению пути и серьезному износу колеса/рельса [13]; при этом уменьшается продольное сцепление колеса, что приводит к уменьшению гиропоперечного момента и ухудшению характеристик сцепления. Таким образом, угол атаки становится важным показателем для измерения криволинейных характеристик радиальных тележек. Уменьшение горизонтальной позиционной жесткости буксы колесной пары способствует уменьшению угла атаки, но не может гарантировать поперечную устойчивость тележки.
В результате увеличиваются боковые силы проскальзывания между колесом и рельсом, что приводит к возможному боковому смещению пути и серьезному износу колеса/рельса [13]; при этом уменьшается продольное сцепление колеса, что приводит к уменьшению гиропоперечного момента и ухудшению характеристик сцепления. Таким образом, угол атаки становится важным показателем для измерения криволинейных характеристик радиальных тележек. Уменьшение горизонтальной позиционной жесткости буксы колесной пары способствует уменьшению угла атаки, но не может гарантировать поперечную устойчивость тележки.
3. Конструкция и механизм TFDA-тележек
Симметричная радиальная конструкция тележки со стержнем «»-образной формы представлена немецким электровозом Э120 [14]. Эта радиальная тележка имеет симметричную конструкцию, передний и задний мосты которой вращаются вокруг осей и соответственно, а также равноплечие левого и правого колес. Как показано на рисунке 1, во время прохождения кривой продольные силы ползучести левого и правого колес создают момент силы ползучести. Под его действием передняя и задняя оси вращаются вокруг осей и, соответственно, в противоположном направлении, что вынуждает колесную пару занимать примерно радиальное положение в поворотах.
Под его действием передняя и задняя оси вращаются вокруг осей и, соответственно, в противоположном направлении, что вынуждает колесную пару занимать примерно радиальное положение в поворотах.
Если радиальная регулировочная тяга установлена только на одном конце, а другой конец остается неизменным, тележка станет асимметричной. Как показано на рис. 2(а), центры вращения передней и задней колесных пар смещаются к левой стороне буксы, а стержень в форме буквы «» расположен с правой стороны.
Под действием момента силы ползучести правые стороны переднего и заднего мостов сближаются или отдаляются друг от друга, а сторона и остается неизменной, как показано на рис. 2(б). То есть увеличьте расстояние между внешними колесами передней и задней колесных пар, чтобы колесные пары могли принять радиальное положение. Из этого следует, что радиальная регулировка может быть достигнута, если для соединения передней и задней колесных пар используется стержень в форме « ».
На рис. 3 показаны силы, действующие на симметричный радиальный механизм [15]. К силам, действующим на колесные пары, относятся сила ползучести колеса/рельса, момент силы ползучести, нормальная контактная сила колеса/рельса, силы первичной подвески и сила тяжести колесных пар. Силы, действующие на переднюю и заднюю колесные пары, одинаковы: – сила ползучести, – нормальная контактная сила, – сила подвеса; представляет продольное направление, левое и правое; момент и сила тяжести колесной пары. Например, представляет продольную силу ползучести левого колеса передней колесной пары. расстояние между журнальными ящиками. — расстояние между окружностью качения переднего колеса и буксой. расстояние между окружностью качения заднего колеса и буксой.
3 показаны силы, действующие на симметричный радиальный механизм [15]. К силам, действующим на колесные пары, относятся сила ползучести колеса/рельса, момент силы ползучести, нормальная контактная сила колеса/рельса, силы первичной подвески и сила тяжести колесных пар. Силы, действующие на переднюю и заднюю колесные пары, одинаковы: – сила ползучести, – нормальная контактная сила, – сила подвеса; представляет продольное направление, левое и правое; момент и сила тяжести колесной пары. Например, представляет продольную силу ползучести левого колеса передней колесной пары. расстояние между журнальными ящиками. — расстояние между окружностью качения переднего колеса и буксой. расстояние между окружностью качения заднего колеса и буксой.
Установлен активный управляющий сигнал для двигателей несимметричной радиальной тележки; затем можно определить направления кривой и соответствующим образом отрегулировать токи переднего и заднего двигателей, чтобы колесные пары могли занять радиальное положение.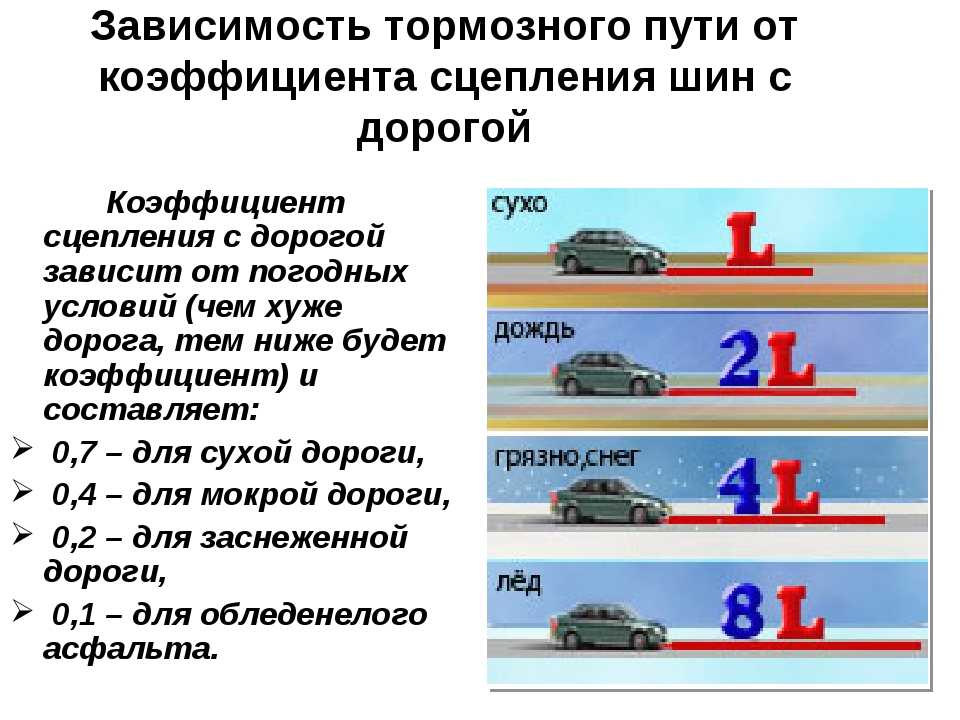 Такой тележкой является управляемая по перепаду тяговых усилий асимметричная радиальная тележка (далее — TFDA-тележка).
Такой тележкой является управляемая по перепаду тяговых усилий асимметричная радиальная тележка (далее — TFDA-тележка).
Как показано на рис. 4, представляют собой электрический ток переднего и заднего двигателей соответственно. Вышеупомянутый активный управляющий сигнал, по сути, представляет собой датчик угла поворота, установленный на кузове вагона, который в реальном времени отслеживает рысканье его тележки 9.0035 α во время согласования кривой. В соответствии с обнаруженным рысканием тележки α контроллер производит разумную регулировку токов переднего и заднего двигателей и, таким образом, создает разность тягового усилия между передней и задней колесными парами, которая воздействует моментом заданной величины и направления на асимметричный радиальный механизм, так что правые концы передней и задней колесных пар сближаются или расходятся.
Активный управляющий сигнал имеет множество источников, которые могут включать угол между передним и задним кузовом автомобиля, угол между кузовом автомобиля и радиальной рамой, радиус кривой, полученный из поперечного ускорения и скорости транспортного средства, скорость угла рыскания и скорость транспортного средства . Некоторые из этих сигналов относительно легко измерить, в то время как другие трудно обработать. Например, некоторые сигналы наклона после обработки также могут быть использованы для радиального контроля [16, 17], но могут привести к значительной погрешности из-за необходимости измерения сверхбольшого угла.
Некоторые из этих сигналов относительно легко измерить, в то время как другие трудно обработать. Например, некоторые сигналы наклона после обработки также могут быть использованы для радиального контроля [16, 17], но могут привести к значительной погрешности из-за необходимости измерения сверхбольшого угла.
Вышеизложенное относится к радиальным тележкам любого типа. Однако промежуточная ось трехосных тележек напрямую не связана с направляющим механизмом и поэтому на рисунке не показана.
4. Модель транспортного средства и тележки
Используемые модели транспортных средств предназначены для трехосных локомотивов с соответствующими размерами и массой кузова, рамы тележки и колесной пары. Полная масса автомобиля составляет 150 тонн. В таблице 1 перечислены основные параметры автомобиля.
С SIMPACK, программным обеспечением для динамики нескольких тел, настраиваются динамические модели тележек TFDA, обычных тележек и радиальных тележек. На рис. 5 (а) показана радиальная тележка, а на рис. 5 (б) — тележка TFDA, только с половиной количества стержней и соединений радиальной тележки на рис. 5 (а).
5 (б) — тележка TFDA, только с половиной количества стержней и соединений радиальной тележки на рис. 5 (а).
JM3 — износостойкий протектор. Геометрия контакта колесной пары показана на рисунке 6.
5. Результаты
5.1. Анализ производительности кривой
Существует множество индикаторов для измерения производительности кривой. Обычно угол атаки колесной пары, поперечная сила ведущего колеса, мощность трения ведущего колеса и общая мощность трения транспортного средства могут определить, хорошо или плохо справляются тележки с криволинейными характеристиками. С SIMPACK сила ползучести колеса/рельса рассчитывается в соответствии с нелинейной теорией ползучести Калкера, а взаимосвязь между силой контакта колеса/рельса и ползучести основана на алгоритме FASTSIM, упрощенной теории Калкера [18, 19].].
Сила износа колеса отражает степень износа беговой дорожки колеса/рельса, которую можно рассчитать по следующей формуле [20]: где – продольная сила ползучести; – боковая сила ползучести; представляет собой ползучий крутящий момент.
Мощность износа всего транспортного средства определяется алгебраической суммой износа всех колес и отражает уровень износа колеса/рельса транспортного средства.
Когда тяговое усилие на каждой колесной паре установлено на 0, это состояние холостого хода; в противном случае это состояние тяги. Тяговые силы в 150 кН действуют на локомотивы с тремя различными типами тележек соответственно. При движении по прямой тяговое усилие в 150 кН равномерно распределяется между 6 колесными парами, и, таким образом, тяговое усилие, действующее на каждую колесную пару, составляет 25 кН. Когда каждая тележка приближается к повороту, TFDA-тележки используют следующую стратегию управления: при подаче сигнала правого поворота от датчика угла сохранить тягу на промежуточных колесных парах 2 и 5 неизменной, отключить ток двигателей колесных пар. 1 и 4, и, таким образом, снизить их тягу с 25 кН до 0. При этом увеличить ток двигателя колесных пар 3 и 6 и, таким образом, увеличить их тягу с 25 кН до 50 кН, чтобы разница тяги передней и задней колесных пар создается 50 кН.
Когда каждый Bogie ведет переговоры R = 300 м, R = 400 м, R = 500 м, R = 600 м, R = 800 м, R = 1000 м, R, 800 м, R = 1000 м, R. = 1200 м и R = 1600 м, соответственно, получены такие показатели, как угол атаки ведущего колеса, боковая сила ведущего колеса и мощность износа всего транспортного средства, все из которых показаны на рисунке 7; представляет собой тяговую силу, действующую на каждую колесную пару (далее аналогично).
Как показано на рис. 7, угол атаки ведущего колеса обычных тележек достигает максимума во время прохождения кривой с тяговым усилием. При радиусе кривизны более 800 м радиальные тележки теряют направляющую функцию. В режиме холостого хода угол атаки тележек TFDA близок к углу атаки обычных тележек; направляющее усилие тележек TFDA меньше, в которых направляющее усилие отнесено к внешней боковой силе колеса/рельса первой колесной пары на криволинейном пути, а знак «» относится к другому направлению; мощность износа ведущего колеса тележек TFDA аналогична мощности обычных тележек, в то время как мощность износа всего транспортного средства у тележек TFDA ниже. В условиях тяги общие характеристики тележек TFDA превосходят обычные тележки, поскольку тяга является важным фактором, влияющим на общую мощность износа транспортного средства. Из-за четырехкратной разницы в продольной позиционной жесткости динамические показатели тележек TFDA не уступают радиальным тележкам. Для дальнейшего анализа необходимо уменьшить продольную позиционную жесткость тележек TFDA.
В условиях тяги общие характеристики тележек TFDA превосходят обычные тележки, поскольку тяга является важным фактором, влияющим на общую мощность износа транспортного средства. Из-за четырехкратной разницы в продольной позиционной жесткости динамические показатели тележек TFDA не уступают радиальным тележкам. Для дальнейшего анализа необходимо уменьшить продольную позиционную жесткость тележек TFDA.
5.2. Влияние разницы тягового усилия передних и задних колесных пар на управляемость
Во время прохождения кривой с приложенным тяговым усилием тяговое усилие изменяет размер и направление продольных и поперечных сил проскальзывания колеса/рельса, тем самым снижая функцию самоуправляемости тележек. Чтобы проанализировать положительное влияние разницы тяги на управляемость, исследуются динамические характеристики тележек TFDA при прохождении кривой радиусом R = 600 м с виражом 50 мм.
Суммарные тяговые силы, действующие на локомотив с TFDA-тележками, устанавливаются равными 60 кН, 120 кН и 180 кН соответственно, и соответственно тяговые силы, действующие на каждую колесную пару, равномерно распределяются на уровне 10 кН, 20 кН и 30 кН, когда стратегия разницы тяговых сил не используется. При применении стратегии тягу на промежуточных колесных парах 2 и 5 оставить неизменной, тягу на передних колесных парах 1 и 4 снизить до 0, а на задних колесных парах 3 и 6 поднять вверх; следовательно, разница тягового усилия каждой передней и задней колесных пар составляет 20 кН, 40 кН и 60 кН соответственно. Результаты расчета приведены на рис. 8.
При применении стратегии тягу на промежуточных колесных парах 2 и 5 оставить неизменной, тягу на передних колесных парах 1 и 4 снизить до 0, а на задних колесных парах 3 и 6 поднять вверх; следовательно, разница тягового усилия каждой передней и задней колесных пар составляет 20 кН, 40 кН и 60 кН соответственно. Результаты расчета приведены на рис. 8.
Тяговые силы значительно улучшили угол рыскания. При одинаковых суммарных тягах угол атаки ведущего колеса уменьшается не более чем на 18,8 %, а общая мощность износа машины снижается не более чем на 6,3 %. При одинаковой силе тяги, действующей на каждую колесную пару, угол атаки ведущего колеса и мощность износа всего транспортного средства увеличиваются по мере увеличения общей тяги; в то время как вводится разница в тяге, угол атаки ведущего колеса эффективно уменьшается и даже сохраняется тенденция к снижению по мере увеличения общей тяги. Хотя общая мощность износа транспортного средства увеличивается по мере увеличения общей тяги, ее рост можно замедлить за счет управления разницей тяги. Например, когда общая тяга составляет 120 кН, а соответствующая разница тяги составляет 40 кН, общая мощность износа транспортного средства достигает максимального снижения на 6%.
Например, когда общая тяга составляет 120 кН, а соответствующая разница тяги составляет 40 кН, общая мощность износа транспортного средства достигает максимального снижения на 6%.
5.3. Влияние продольной жесткости оси
При уменьшении продольной жесткости оси TFDA-тележек с 20 МН/м до 10 МН/м и 5 МН/м, остальные параметры неизменны, при условии полной тяги 120 кН и соответствующей разница тягового усилия при 40 кН, сравниваются характеристики поворота тележек TFDA и радиальных тележек при движении по криволинейной дороге длиной 400 м, 600 м, 800 м, 1000 м, 1200 м и 1600 м соответственно, и результаты показаны на Рисунок 9.
Угол атаки ведущего колеса и мощность износа ведущего колеса тележек TFDA уменьшаются по мере уменьшения жесткости продольной оси. При этом угол атаки ведущего колеса тележек TFDA аналогичен углу атаки радиальных тележек в тяговом режиме; направляющее усилие TFDA-тележек при прохождении кривой от 600 м до 1200 м аналогично радиальным тележкам на холостом ходу; мощность износа ведущего колеса TFDA-тележек находится между таковой для радиальных тележек на холостом ходу и в тяговом режиме, сохраняя при этом сходство с таковой у радиальных тележек на холостом ходу при радиусе кривизны более 800 м; а в целом по изнашиваемости тележек TFDA-тележек всецело уступает таковой радиальных тележек в тяговом режиме.
5.4. Анализ симметрии TFDA-тележек
Кривые S-образной формы изучаются, когда тележки TFDA преодолевают кривую 400 м, 600 м, 800 м, 1000 м, 1200 м и 1600 м, соответственно, с приложенной разностью тягового усилия 50 кН, и результаты показаны на рисунке 10.
Угол атаки ведущего колеса и мощность износа всего транспортного средства тележек TFDA имеют лучшие симметричные характеристики, в то время как направляющая сила и мощность износа ведущего колеса симметрично хуже, с соответствующей средней разницей в 8,0 кН и 0,9кН·м/с. С учетом индикатора износа тележки TFDA имеют сравнительно слабые характеристики при прохождении правильного поворота. Однако, поскольку весь вышеупомянутый анализ включает в себя правую кривую, сравнительный анализ между тележками TFDA и другими тележками, соответственно, надежен.
6. Заключение и перспективы
Были проведены исследования криволинейных характеристик трех различных тележек, из которых тележки TFDA, как новый тип радиальных тележек, компенсирующих кривые за счет использования разницы тягового усилия, никогда ранее не исследовались.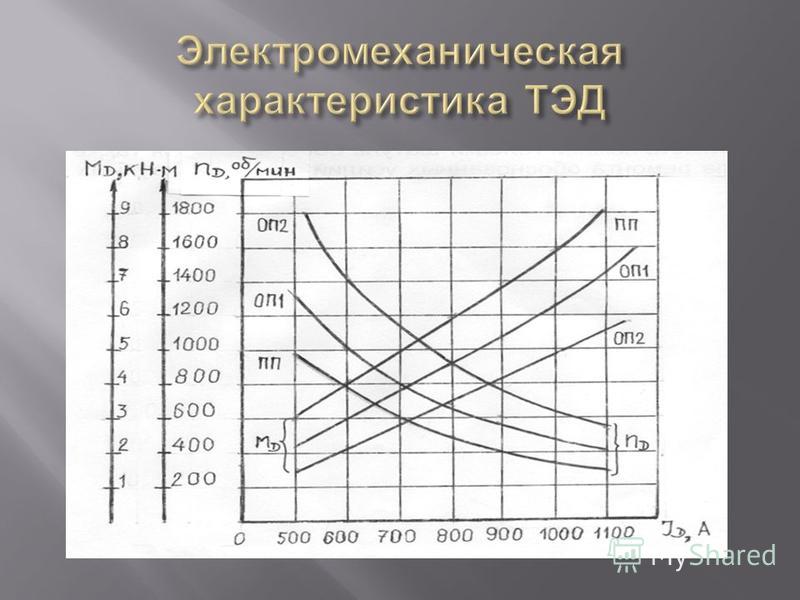 Исследования показывают, что некоторые рабочие характеристики тележек TFDA могут достигать уровня радиальных тележек в режиме холостого хода, что дает основания для дальнейших исследований. Таким образом, делаются выводы и выдвигается перспектива, исходя из современного уровня исследований.
Исследования показывают, что некоторые рабочие характеристики тележек TFDA могут достигать уровня радиальных тележек в режиме холостого хода, что дает основания для дальнейших исследований. Таким образом, делаются выводы и выдвигается перспектива, исходя из современного уровня исследований.
(1) Механизм TFDA-тележек конструктивно прост, в частности, для электротехников, от датчика до управления двигателем. Активные источники управляющих сигналов легко доступны, например, угол между кузовом вагона и рамой тележки, который относительно легко обрабатывать и обладает сильными антипомеховыми характеристиками.
(2) При тех же условиях характеристики поворота тележек TFDA превосходят обычные тележки; по сравнению с радиальными тележками обе имеют свои достоинства и недостатки.
(3) Криволинейные характеристики тележек TFDA еще предстоит улучшить путем углубленных исследований; например, можно ли поднять всю мощность износа вагона до уровня радиальных тележек, регулируя параметры TFDA-тележек? Как минимизировать разницу мощности трения ведущего колеса на правой и левой кривых?
(4) Несимметричные радиальные тележки представляют собой конструктивно упрощенные радиальные тележки, которые служат простейшим радиальным механизмом применения разности тяг. Можно ли отделить понятие разности тяг от радиального механизма? Какую роль при этом играет тяговый редуктор? Вопросы в этом плане еще предстоит решить в будущих исследованиях.
Можно ли отделить понятие разности тяг от радиального механизма? Какую роль при этом играет тяговый редуктор? Вопросы в этом плане еще предстоит решить в будущих исследованиях.
Конкурирующие интересы
Авторы заявили об отсутствии потенциальных конкурирующих интересов в отношении исследования, авторства и/или публикации этой статьи.
Благодарности
Работа поддерживается независимым исследовательским проектом Государственной ключевой лаборатории тяговой мощности (№ 2016TPL-T10) и Национальным фондом естественных наук Китая (грант № 51575458).
Ссылки
Х. Шеффель, «Опыт работы южноафриканских железных дорог с диагонально стабилизированными (CROSS-ANCHOR) тележками с самоуправляемыми колесными парами», в Proceedings of the Heavy Haul Railways Conference , Perth, Western Australia, 1978.
Посмотреть по адресу:
Google Scholar
Х.
 А. Лист и Г. Венн-Браун, Условия , Институт инженеров, Австралия, 1985.
А. Лист и Г. Венн-Браун, Условия , Институт инженеров, Австралия, 1985.М. Ахмадиан и В. Хуанг, «Качественный анализ динамики самоуправляемых локомотивных тележек», Динамика систем транспортных средств , том. 37, нет. 2, стр. 85–127, 2002 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Р. Э. Смит и Дж. Калоусек, «Методология проектирования профилей колес и рельсов для использования на управляемых железнодорожных транспортных средствах», Wear , vol. 144, нет. 1–2, стр. 329–342, 1991.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Р. М. Гудолл, «Проблемы инженерии управления для железнодорожных поездов будущего», Измерение и управление , том. 44, нет. 1, стр. 16–24, 2011 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Ф.
 Брагин, С. Бруни и Ф. Реста, «Активный демпфер рыскания для улучшения устойчивости железнодорожного транспортного средства и кривых характеристик: моделирование и экспериментальные результаты», Vehicle System Dynamics , vol. 44, нет. 11, стр. 857–869, 2006.
Брагин, С. Бруни и Ф. Реста, «Активный демпфер рыскания для улучшения устойчивости железнодорожного транспортного средства и кривых характеристик: моделирование и экспериментальные результаты», Vehicle System Dynamics , vol. 44, нет. 11, стр. 857–869, 2006.Посмотреть по адресу:
Сайт издателя | Google Scholar
Н. Миядзима, А. Мацумото, Ю. Суда и др., «Моделирование динамики нескольких тел и оценка конструкции тележки для грузовика с активным управлением тележкой», в Материалы Международного конгресса и выставки ASME по машиностроению (IMECE ’07) , стр. 459–465, ноябрь 2007 г.
Посмотреть по адресу:
Сайт издателя | Google Scholar
М. Чиаварелла и Дж. Барбер, «Влияние продольной ползучести и инерции колеса на волнистость с коротким шагом: безрезонансный механизм для объяснения феномена ревущего рельса», Труды Института инженеров-механиков, Часть J: Журнал инженерной трибологии , том.
 222, нет. 3, стр. 171–181, 2008 г.
222, нет. 3, стр. 171–181, 2008 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
JJ Kalker, Трехмерные упругие тела в контакте качения , vol. 2, Kluwer Academic Publishers, Дордрехт, Нидерланды, 1990.
Посмотреть по адресу:
Сайт издателя | MathSciNet
W. Zhai, J. Gao, P. Liu и K. Wang, «Уменьшение бокового износа рельсов на кривых большегрузных железных дорог на основе динамического взаимодействия колеса с рельсом», Динамика систем автомобиля , том. 52, нет. 1, стр. 440–454, 2014.
Посмотреть по адресу:
Сайт издателя | Google Scholar
О. Полах, «Силы ползучести в моделировании тяговых транспортных средств, работающих на пределе сцепления», Wear , vol. 258, нет. 7–8, стр.
 992–1000, 2005 г.
992–1000, 2005 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
Дж. Сантамария, Э. Г. Вадильо и Дж. Гомес, «Влияние сил ползучести на риск схода с рельсов железнодорожных транспортных средств», Динамика систем автомобиля , том. 47, нет. 6, стр. 721–752, 2009.
Посмотреть по адресу:
Сайт издателя | Google Scholar
С. Ямасита, А. Сакамаки и Х. Сугияма, «Характеристики силы ползучести контакта колеса с рельсом при контроле трения», в Proceedings of the International Machine Engineering Congress and Exposition (ASME ’11) , стр. 375–379, Денвер, штат Колорадо, США, ноябрь 2011 г.
Посмотреть по адресу:
Сайт издателя | Академия Google
A. Schaefer-Enkeler, «Drehgestelle mit radio einstellbaren radsaetzen fuer triebfahrzeuge», Zeitschrift für Eisenbahnwesen und Verkehrstechnik , vol.
 116, стр. 44–48, 1992.
116, стр. 44–48, 1992.Посмотреть по адресу:
Google Scholar
С. А. Симсон и К. Коул, «Идеализированное рулевое управление для буксировки локомотивов», Труды Института инженеров-механиков, часть F: Журнал железнодорожного и скоростного транспорта , том. 221, нет. 2, стр. 227–236, 2007.
Посмотреть по адресу:
Сайт издателя | Google Scholar
К. П. Уорд, П. Ф. Уэстон, Э. Дж. К. Стюарт и др., «Возможности мониторинга состояния с использованием автомобильных датчиков», Труды Института инженеров-механиков, часть F: Журнал железных дорог и скоростного транспорта , том . 225, нет. 2, стр. 202–218, 2011.
Посмотреть по адресу:
Сайт издателя | Google Scholar
Р. М. Гудолл, «Управление железными дорогами — активные подвески и другие возможности», в Материалы 19-й Средиземноморской конференции по управлению и автоматизации (MED ’11) , стр.
 639–643, июнь 2011 г.
639–643, июнь 2011 г.Посмотреть по адресу:
Сайт издателя | Google Scholar
А. Алонсо, Дж. Г. Хименес и Л. М. Мартин, «Расчет момента вращения и его важность в динамике железных дорог», Труды Института инженеров-механиков, часть F: Журнал железных дорог и скоростного транспорта , том . 223, нет. 5, стр. 453–460, 2009.
Посмотреть по адресу:
Сайт издателя | Google Scholar
JJ Kalker, Трехмерные упругие тела в контакте качения , vol. 2, Springer, Дордрехт, Нидерланды, 1990.
Посмотреть по адресу:
Сайт издателя | MathSciNet
С. Ян-Свиту, З. Ву, В. Ма и Л. Зонг, «Сравнение криволинейных характеристик тележек разных типов», Журнал Балканской трибологической ассоциации , том. 22, нет.
 2016. Т. 2. С. 1175–1183.
2016. Т. 2. С. 1175–1183.Посмотреть по адресу:
Google Scholar
Copyright
Copyright © 2016 Yan Shi et al. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Проблемы с дорожной солью — и как она усиливает зависимость от автомобилей — Streetsblog USA
Примечание редактора: эта статья изначально была опубликована в Strong Towns и публикуется с разрешения.
Во время зимних штормов во многих северных странах соль используется в качестве основного средства против обледенения дорог зимой. Дорожная соль довольно недорогая, но на самом деле она наносит большой ущерб нашей общественной инфраструктуре (дорогам, мостам), транспортным средствам и источникам пресной воды. Соль, или хлорид натрия, вызывает коррозию, поэтому можно предположить, что это недорогое краткосрочное решение, которое сделает наши дороги более безопасными, может стоить нам дороже в долгосрочной перспективе.
Соль, или хлорид натрия, вызывает коррозию, поэтому можно предположить, что это недорогое краткосрочное решение, которое сделает наши дороги более безопасными, может стоить нам дороже в долгосрочной перспективе.
Потребление соли резко возросло после Второй мировой войны, с появлением пригородов. Поскольку люди стали полагаться на автомобили для поездок на работу, вождение в любых погодных условиях стало критически важным для экономики, и, таким образом, мы увидели, что соль стала основным средством контроля скользкости зимних дорог.
Когда пассажирам и дальнобойщикам приходилось передвигаться в любых условиях, во многих городах стало принято расчищать дороги вскоре после шторма. Из-за того, что на дорогах в скользких условиях было больше автомобилей, было больше столкновений, поэтому были найдены другие решения, выходящие за рамки типичного плуга. Более недавнее исследование показало, что, посыпая наши заснеженные и обледенелые дороги солью, мы сокращаем количество дорожно-транспортных происшествий до 87%.
Но до того, как наше общество вращалось вокруг использования автомобилей, когда начинались штормы и делали дороги небезопасными, большинство людей просто смирились с тем, что по тротуару нельзя проехать, и остались дома. Если не было возможности передвигаться пешком или поездом, поездки откладывались, и люди брали выходные, пока не проезжали плуги и не прояснялась погода. Те, кому приходилось ездить в опасных условиях, ставили на свои машины цепи противоскольжения, а местные органы власти посыпали песком и золой, чтобы улучшить сцепление на льду.
Хотя люди могли не знать об этом в то время, оставаться дома в течение нескольких «снежных» дней может быть лучшим вариантом для финансовой устойчивости наших городов, чем наша нынешняя привычка мгновенно расчищать дороги. Якобы каменная или дорожная соль стоит недорого. Это одна из причин, по которой мы так полагаемся на нее, поскольку Соединенные Штаты используют до 20 миллионов тонн соли в год для удаления льда с дорог. Тем не менее, Агентство по охране окружающей среды США (EPA) подсчитало, что использование каменной соли в качестве антиобледенителя обошлось нам примерно в 5 миллиардов долларов в год на ремонт автомобилей, грузовиков, дорог и мостов из-за долговременного ущерба, который она наносит.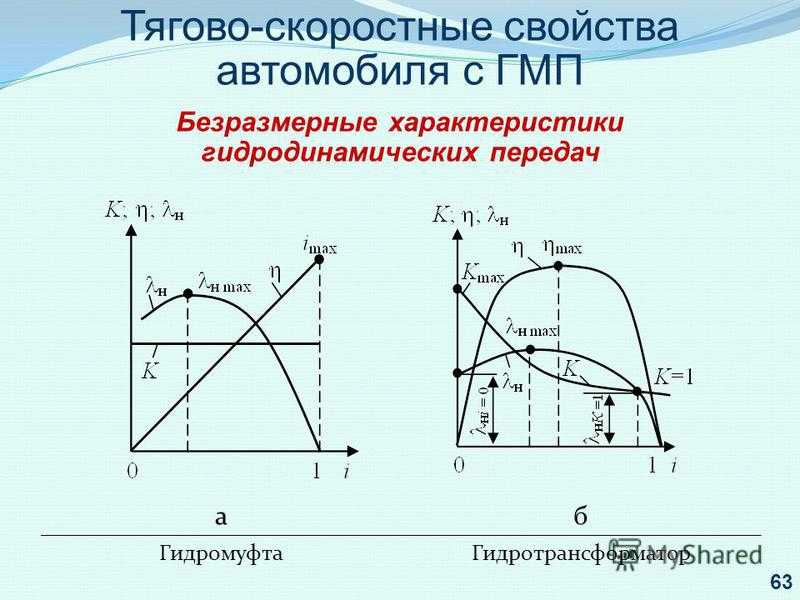
Те из нас, кто живет в более холодном северном климате, знают, что в конце концов после многих лет езды по соленым дорогам днище наших автомобилей ржавеет и разрушается. Ионы хлора в соли обладают способностью разрушать защитный оксидный слой, образующийся на поверхности некоторых металлов (в том числе алюминия), и ускорять процесс долговременного повреждения. Не все покрытия одинаковы, но соль сокращает срок службы бетона и асфальта, ускоряя нормальный процесс износа в результате циклов замерзания-оттаивания зимой.
Изображение: Unsplash Несмотря на то, что дорожная соль сокращает продолжительность жизни нашей инфраструктуры, в северной части США и Канады стало необходимо сделать наши дороги безопасными для вождения в снежные зимы. Как правило, мы покрываем наши дороги галитом или каменной солью (той же формой соли, которую мы иногда используем для картофеля фри), после того как она прошла длительный процесс очистки.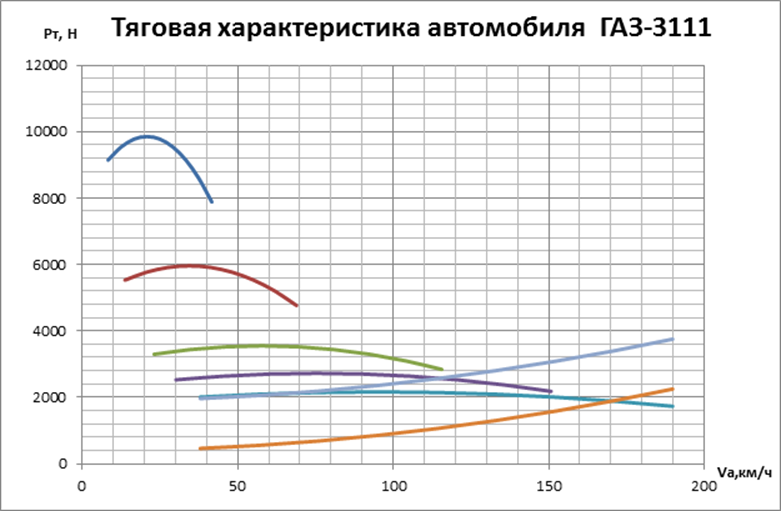
Соль снижает температуру замерзания воды в результате процесса, называемого снижением точки замерзания. Вода должна иметь температуру 32 градуса по Фаренгейту (0 градусов по Цельсию), чтобы начать превращаться в лед. По сути, после добавления соли в смесь вода должна стать намного холоднее, чем обычно, чтобы замерзнуть. Вот как мы получаем эффект таяния льда, когда посыпаем солью передние крыльца.
Конечно, недорогая каменная соль не является идеальным решением для борьбы с обледенением. Когда температура опускается ниже 20 градусов по Фаренгейту, может быть слишком холодно, чтобы хлорид натрия мог действовать сам по себе. Именно тогда вы можете увидеть, как местные общественные работы и транспортные отделы добавляют другие химические вещества (соли), такие как хлорид магния или хлорид кальция, в свои солевые смеси (хлорид натрия).
Хлористый натрий не только способствует эрозии дорожного покрытия и металла, смываясь с дороги, он попадает в землю и может загрязнять наши пресноводные системы, вызывая повышение уровня натрия.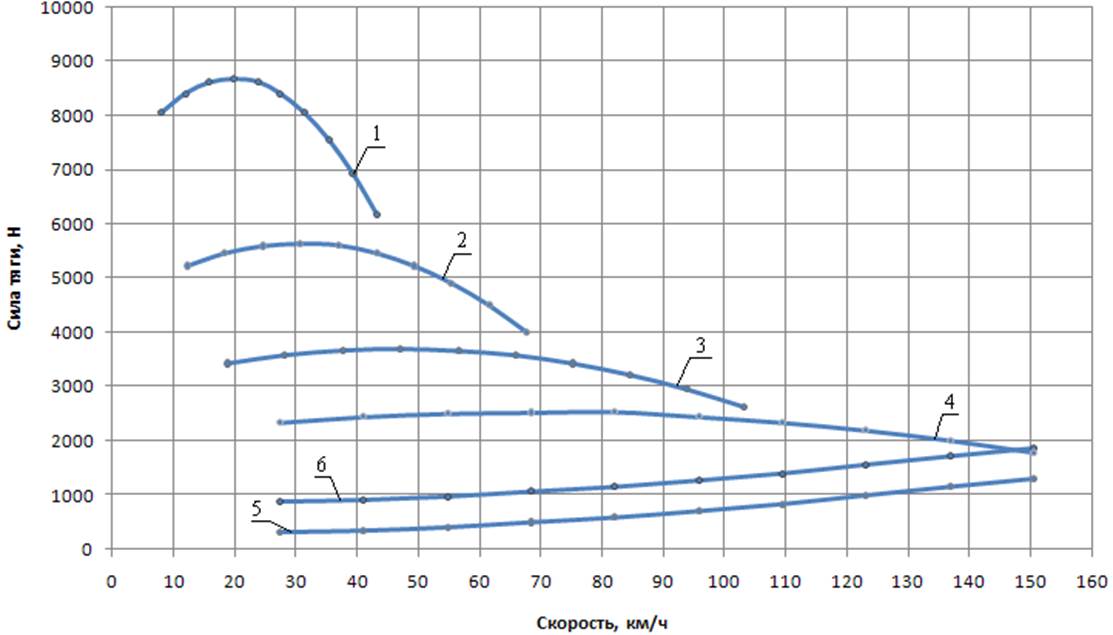 И на данный момент у нас нет возможности его удалить. В 2018 году исследование колодцев в округе Датчесс, штат Нью-Йорк, показало, что концентрация натрия была намного выше, чем рекомендации федерального уровня и штата. Они обнаружили уровни до 860 миллиграммов на литр в некоторых скважинах, в то время как общая рекомендация составляет 270 миллиграммов на литр.
И на данный момент у нас нет возможности его удалить. В 2018 году исследование колодцев в округе Датчесс, штат Нью-Йорк, показало, что концентрация натрия была намного выше, чем рекомендации федерального уровня и штата. Они обнаружили уровни до 860 миллиграммов на литр в некоторых скважинах, в то время как общая рекомендация составляет 270 миллиграммов на литр.
Джозеф Стромберг из Smithsonian Magazine писал: «По мере того, как все больше и больше США становятся урбанизированными и пригородными, и по мере того, как все больше дорог пересекает ландшафт, растущие груды соли, которые мы сбрасываем на них, могут становиться все меньше. большая проблема, чем когда-либо».
В 2004 году Канада объявила дорожную соль экологическим токсином и ввела новые правила ее использования. Многие местные органы власти США искали способы хотя бы сократить использование дорожной соли. Однако найти альтернативу, которая полностью исключает использование соли, не так просто, поскольку многие из этих альтернатив требуют более высоких первоначальных затрат. Другие потенциальные варианты защиты от обледенения, которые стоят по той же или более низкой цене, чем соль, как правило, не так эффективны при разрушении обледенелых дорог.
Другие потенциальные варианты защиты от обледенения, которые стоят по той же или более низкой цене, чем соль, как правило, не так эффективны при разрушении обледенелых дорог.
Полное удаление соли с наших дорог может показаться сложной задачей, пока мы полагаемся на автомобили в качестве транспорта, но, возможно, мы сможем сократить ее использование. Организации и некоторые местные органы власти сосредоточены на распределении необходимого количества соли для различных условий.
Агентство по контролю загрязнения Миннесоты, например, предлагает обучение «Умному солению» для отдельных лиц и организаций. Их цель — «предоставить новейшие технологии, передовой опыт и инструменты, а также доступные ресурсы, чтобы помочь вашей организации эффективно управлять снегом и льдом».
Wisconsin Salt Wise Partnership занимается обучением специалистов по техобслуживанию тому, сколько соли действительно необходимо для эффективной работы. Даже при личном использовании соли, при уходе за подъездными путями и тротуарами, мы склонны посыпать больше соли, чем нам действительно нужно для эффективного разрушения льда.
Даже при личном использовании соли, при уходе за подъездными путями и тротуарами, мы склонны посыпать больше соли, чем нам действительно нужно для эффективного разрушения льда.
Также велись дискуссии о предварительном засыпании дороги солью перед штормом — методе, принятом в Род-Айленде в 2012 году, под названием Anti-Icing. В более малоизвестной альтернативе используется свекольный и томатный сок в качестве решения для предотвращения обледенения наших дорог. Это может показаться странным, но также говорят, что использование соляного раствора помогает минимизировать сток соли и потенциально помогает сократить потребление соли.
Помимо изменения способа выбрасывания соли на наши дороги, возможны инновационные решения в отношении использования пористого дорожного покрытия. Агентство по охране окружающей среды пишет: «пористое или проницаемое дорожное покрытие позволяет просачиваться стоячей воде, удаляя воду с дорог, которые обычно проходят через периоды замерзания и оттаивания, тем самым предотвращая образование льда на дорогах».