Радиосхемы. — Ультразвуковой радар
материалы в категории
Этот ультразвуковой радар работает по тому-же принципу что и все остальные (например Инфракрасный локатор или Датчик присутствия)- излучение и прием отраженного сигнала. И если в отраженном сигнале будут какие-то искажения, то он издаст сначала предупредительный сигнал (например для хозяина как напоминание что его необходимо выключить), а затем включит сирену.
Применить такой радар можно в качестве охранного устройства— он позволит контролировать комнату площадью до 20 км. метров, не требует прокладки охранных шлейфов и его практически нельзя отключить если не знать где он находится.
Схема ультразвукового радара
В состав датчика перемещения входят акустический излучатель и приемник. Излучатель вырабатывает сигнал в ультразвуковом диапазоне стабильной амплитуды и частоты. Частоту желательно выбирать в пределах 25…35 кГц. Звуковые волны распространяются во все стороны от излучателя и попадают в приемный датчик разными путями. Прямой сигнал идет непосредственно от излучателя к приемнику. Кроме этого, на вход приемного датчика поступают сигналы, отраженные от окружающих предметов. Амплитуда и сдвиг фазы отраженного сигнала относительно прямого имеют случайную, но постоянную величину и зависят от размеров помещения, места расположения датчика и находящихся в помещении предметов.
Прямой сигнал идет непосредственно от излучателя к приемнику. Кроме этого, на вход приемного датчика поступают сигналы, отраженные от окружающих предметов. Амплитуда и сдвиг фазы отраженного сигнала относительно прямого имеют случайную, но постоянную величину и зависят от размеров помещения, места расположения датчика и находящихся в помещении предметов.
В приемном датчике прямой и отраженный сигналы смешиваются, образуя суммарный принятый сигнал определенной амплитуды. При перемещении хотя бы одного предмета, на который попадает звуковая волна, фаза и амплитуда отраженного сигнала изменяются. Перемещение отражающей поверхности приблизительно на 1 см приведет к изменению фазы отраженного сигнала на 180°, поэтому длительное перемещение отражающей поверхности вызовет пульсацию суммарного принятого сигнала с частотой от 1 до 100 Гц в зависимости от скорости и направления перемещения. При появлении в принятом сигнале такого рода пульсации срабатывает сигнальное устройство и подается звуковой сигнал.
Генератор излучателя построен по схеме емкостной трехточки. Излучатель BQ1 включен в цепь обратной связи транзистора VT1.
Частота колебаний генератора зависит от резонансной частоты излучателя BQ1 и параметров контура L1 С1. Мощность излучения регулируют подбором резистора R3, а подстройку частоты производят подбором конденсатора С1.
Приемник состоит из ультразвукового микрофона ВМ1, усилителя принимаемого сигнала на ОУ DA1.1, детектора на элементах R11, VD2, С8, R13, усилителя продетектированного сигнала на ОУ DA1.2 и транзисторного ключа VT2VT3. Параметры детектора подобраны таким образом, чтобы подавление несущей частоты в диапазоне 25…35 кГц было максимальным, а ослабление низкочастотных пульсации 1…100 Гц — минимальным. Цепь C7R12C9R14 задает коэффициент усиления и полосу пропускания ОУ DA1.2. При появлении переменного напряжения на его выходе положительная полуволна через конденсатор С10 открывает транзисторный ключ VT2VT3, а отрицательная полуволна через диодУОЗ перезаряжает конденсатор С10.
Сигнальное устройство включает в себя триггер Шмитта на элементах DD1.1, DD1.2, узел управления на элементах DD1.3, DD1.4, усилитель тока на транзисторах VT5, VT6, тиристор VS1 и излучатель звукового сигнала BF1. При включении питания заряжается конденсатор С12. Примерно через 1…1.5 мин на выводе 2 элемента DD1.1 возникает высокий уровень. Теперь, если сработает детектор перемещения, транзисторы VT2, VT3 и VT4 откроются, высокий уровень на выводе 1 элемента DD1.1 переключит триггер. На выходе DD1.1 возникнет низкий уровень, а на выходе триггера (вывод 4 DD1.2) — высокий. Цепь C13R23 задает длительность короткого звукового сигнала — 0,1 с, а цепь R21C14 — задержку подачи длительного звукового сигнала — 60 с. Цепь R20C12 определяет длительность звукового сигнала и задержку работы устройства после включения питания.
Потребляемый ток в дежурном режиме не превышает 70 мА, а в режиме подачи звукового сигнала — 1…2А.
В качестве излучателя BQ1 и приемника ВМ1 использованы биморф-ные пьезоэлементы, настроенные на одну и ту же резонансную частоту, например 34 кГц.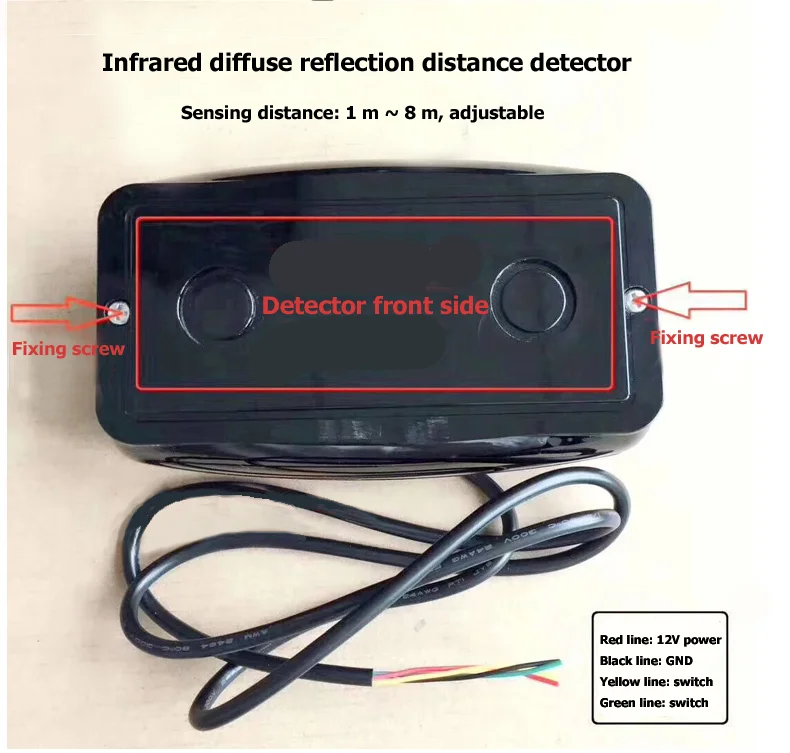 Расстояние между пьезоэлементами должно быть 3…5 см. Между ними необходимо проложить звукоизоляционную прокладку из поролона. В принципе,если не найдется биморфных пьезоэлементов, можно применить обыкновенную высокочастотную динамическую головку и микрофон, снизив при этом частоту излучения вплоть до 10 кГц. Но это ухудшит помехозащищенность устройства, так как ухудшится частотная избирательность приемника. Также станет слышен излучаемый звук, но для охраны небольших закрытых помещений, объектов, например автомобиля, чувствительности окажется вполне достаточно, а звуковое излучение будет хорошо экранировать корпус автомобиля. В таком варианте конструкцию генератора необходимо изменить.
Расстояние между пьезоэлементами должно быть 3…5 см. Между ними необходимо проложить звукоизоляционную прокладку из поролона. В принципе,если не найдется биморфных пьезоэлементов, можно применить обыкновенную высокочастотную динамическую головку и микрофон, снизив при этом частоту излучения вплоть до 10 кГц. Но это ухудшит помехозащищенность устройства, так как ухудшится частотная избирательность приемника. Также станет слышен излучаемый звук, но для охраны небольших закрытых помещений, объектов, например автомобиля, чувствительности окажется вполне достаточно, а звуковое излучение будет хорошо экранировать корпус автомобиля. В таком варианте конструкцию генератора необходимо изменить.
Звуковая сирена BF1 — автомобильный сигнал с током потребления 1…2 А. Катушка L1 намотана на ферритовом кольце марки М2000 размерами 20х12х6 и содержит 100 витков провода ПЭВ-0,3 с отводом от середины. Корпус устройства должен быть сделан с запасом прочности и надежно закреплен на стене внутри охраняемого помещения.
Налаживание начинают с настройки генератора. Для этого необходимо отключить приемный пьезоэлемент ВМ1 и подключить его к осциллографу. Расположив пьезоэлементы друг против друга и подав питание на генератор, подбором конденсатора С1 и резистора R3 добиваются максимальной амплитуды принимаемого сигнала. Можно измерить частоту генератора — она должна соответствовать резонансной частоте излучателя. Затем нужно восстановить соединения, разместить пьезоэлементы в корпусе и подать питание на все устройство. Напряжение на выходах ОУ DA1.1 и DA1.2 (выводы 10 и 12) должно быть равно половине напряжения питания.
В заключение проверяют амплитуду усиленного переменного напряжения на выходе ОУ DA1.1, она должна быть примерно равна 0,1 В. Сильное отличие амплитуды от этого значения приведет к некоторому ухудшению чувствительности. Если провести рукой перед пьезоэлементами, амплитуда переменного напряжения на выходе ОУ DA1.1 начнет пульсировать. Частота пульсации будет тем выше, чем выше скорость перемещения.
Остальная часть устройства в настройке не нуждается и при правильном монтаже должна работать сразу.
Источник: РАДИО №7, 1998
Автор: А. КОЙНОВ
Общее описание Это очень интересный проект с большими вариантами использования в системах безопасности, тревожных домашних системах и в автомобилях. В устройстве скомпонованы ультразвуковой передатчик и приемник работающие на одной частоте. Когда в зоне действия прибора появляется какой либо объект, то он нарушает балансировку схемы и запускается тревожный сигнал. Устройство обладает высокой чувствительностью. Может восстанавливать начальное состояние автоматически или в ручном режиме. Технические характеристики Рабочее напряжение: 12V Внешний вид устройства Работа схемы Приемник и передатчик работают на одной и той же частоте. В передатчике и приемнике используются ультразвуковые пьезоэлектрические преобразователи. Передатчик собран на двух элементах НЕ N1, N2 IC3 образующих мультивибратор. Генерируемый сигнал излучается УЗ преобразователем подключенным к точкам 5 и 6. Частота генерации подстраивается резистором R2. Схема устройства Подсоедините между положительным полюсом источника питания и выводом 9 на схеме последовательно соединенные светодиод и резистор номиналом 560 Ом.  При разомкнутых точках 7 и 8 УЗ радар дает короткие сигналы при появлении посторонних объектов и самостоятельно сбрасывается в исходное положение при их исчезновении. При разомкнутых точках 7 и 8 УЗ радар дает короткие сигналы при появлении посторонних объектов и самостоятельно сбрасывается в исходное положение при их исчезновении.
Монтажные платы Детали:
|


 Затем соедините положительный полюс источника питания с точками на схеме обозначенные как Vcc+. Движок переменного резистора P1 поверните в среднее положение. Затем медленно поворачивайте движок подстроечного резистора P2 и одновременно перемещайте кисть руки перед преобразователем до тех пор пока не будет загораться тестовый светодиод подключенный к точке 9. Быстрее произвести настройку можно, если использовать частотомер. Для этого подсоедините частотомер параллельно передающему УЗ преобразователю. Настраивая P2 добиваются совпадения частоты генератора и паспортного значения УЗ преобразователя. Затем P1 устанавливают требуемую чувствительность. Как вариант можно использовать НЧ осциллограф подключенный к коллектору TR3. В этом случае также настраивается частота генератора по максимальной амплитуде отраженного сигнала. Амплитуда отраженного сигнала на требуемой частоте будет максимальна если вся система УЗ преобразователей настроена в резонанс.
Затем соедините положительный полюс источника питания с точками на схеме обозначенные как Vcc+. Движок переменного резистора P1 поверните в среднее положение. Затем медленно поворачивайте движок подстроечного резистора P2 и одновременно перемещайте кисть руки перед преобразователем до тех пор пока не будет загораться тестовый светодиод подключенный к точке 9. Быстрее произвести настройку можно, если использовать частотомер. Для этого подсоедините частотомер параллельно передающему УЗ преобразователю. Настраивая P2 добиваются совпадения частоты генератора и паспортного значения УЗ преобразователя. Затем P1 устанавливают требуемую чувствительность. Как вариант можно использовать НЧ осциллограф подключенный к коллектору TR3. В этом случае также настраивается частота генератора по максимальной амплитуде отраженного сигнала. Амплитуда отраженного сигнала на требуемой частоте будет максимальна если вся система УЗ преобразователей настроена в резонанс.Радар 80 ГГц и ультразвук: сравнение технологий бесконтактного измерения уровня
Когда дело доходит до бесконтактного непрерывного измерения уровня, радар и ультразвук являются двумя наиболее распространенными технологиями. Обе технологии используются для аналогичных приложений в разных отраслях, и оба типа устройств используют схожие принципы для измерения уровня. Однако каждая технология имеет разную степень успеха в разных приложениях.
Обе технологии используются для аналогичных приложений в разных отраслях, и оба типа устройств используют схожие принципы для измерения уровня. Однако каждая технология имеет разную степень успеха в разных приложениях.
В этом документе сравниваются и противопоставляются радарные датчики с частотой 80 ГГц и ультразвуковые датчики для измерения уровня жидкостей и твердых тел. Пользователи должны учитывать множество переменных при выборе технологии измерения уровня, и в этом документе будет обсуждаться, как каждая технология работает по сравнению с несколькими из них.
Как работают технологии
Радарные и ультразвуковые приборы работают одинаково. Оба они обращены вниз, излучая сигнал, который отражается от поверхности продукта, а электроника датчика использует время пролета для расчета измерения. Тип и форма сигнала, который использует каждая технология, — вот где они начинают расходиться. Все радары, в том числе радиолокационные датчики с частотой 80 ГГц, излучают микроволны, а ультразвуковые передатчики используют звуковые волны.
Радар
Микроволны радара — это электромагнитные волны, а это означает, что сигнал не требует среды — он может распространяться в вакууме. Вот почему сигналы радара не зависят от условий процесса, таких как температура и давление. Это делает радарную технологию универсальной технологией измерения уровня в различных отраслях и областях применения.
Новейшие радарные датчики, использующие более высокую частоту 80 ГГц, имеют очень узкий угол луча — всего 3,6˚. Большая часть энергии сигнала радара фокусируется на небольшой площади, что позволяет радару избегать внутренних препятствий, мешалок или мешалок внутри сосуда. Исключительная фокусировка луча радара также сводит к минимуму любой дополнительный «шум» или нежелательные отражения, отражающиеся внутри судна.
Ультразвуковой
Звуковая волна ультразвукового датчика представляет собой механическую волну, а это означает, что для прохождения требуется среда, и в большинстве случаев этой средой является атмосфера или воздух внутри сосуда. Скорость сигнала зависит от среды, в которой он распространяется. Звуковые волны распространяются с разной скоростью в зависимости от температуры воздуха, давления, плотности и состава газа. Если какое-либо из этих свойств изменяется во время процесса, это может привести к ошибкам измерения, поэтому ультразвуковые датчики больше подходят для простых измерений уровня в процессах, условия которых практически не меняются.
Скорость сигнала зависит от среды, в которой он распространяется. Звуковые волны распространяются с разной скоростью в зависимости от температуры воздуха, давления, плотности и состава газа. Если какое-либо из этих свойств изменяется во время процесса, это может привести к ошибкам измерения, поэтому ультразвуковые датчики больше подходят для простых измерений уровня в процессах, условия которых практически не меняются.
Ультразвуковые сигналы работают с использованием частот в диапазоне от 30 кГц до 240 кГц. В отличие от радара, частота больше зависит от дальности измерения: низкие частоты используются для измерения больших расстояний, а высокие частоты используются для измерения малых расстояний. Некоторые ультразвуковые датчики могут фокусировать большую часть своего сигнала при угле луча 4 или 5˚, но из-за формы акустических волн ультразвуковые датчики с большей вероятностью будут получать нежелательные отражения изнутри сосуда.
Размер и конструкция судна
 Это обеспечит лучшее понимание измерения, требуемого датчиком. Он также может определить, как и где будет установлен датчик для получения точного и надежного измерения уровня.
Это обеспечит лучшее понимание измерения, требуемого датчиком. Он также может определить, как и где будет установлен датчик для получения точного и надежного измерения уровня.Радарные датчики традиционно использовались для измерения уровня на больших расстояниях в больших резервуарах, в то время как ультразвуковые датчики преуспели при меньших расстояниях. Однако по мере развития технологий эти условности начали исчезать. Ультразвуковые датчики по-прежнему более точны при исключительно малых размерах менее шести дюймов. Однако для большинства небольших судов современные радарные датчики с частотой 80 ГГц работают так же хорошо, как и их ультразвуковые аналоги. Кроме того, эти новые датчики имеют небольшие антенны с соответственно небольшими технологическими фитингами, что делает их подходящими для этих небольших резервуаров.
В больших резервуарах с более длительным интервалом измерения хорошо работают как радарные, так и ультразвуковые датчики. Однако пользователи должны быть готовы к компромиссу при использовании ультразвуковых датчиков. Низкочастотные ультразвуковые датчики, используемые для больших расстояний, обычно требуют большего отверстия в верхней части резервуара. Кроме того, у всех ультразвуковых датчиков есть ближняя зона или «мертвая зона», которая по существу представляет собой слепую зону рядом с датчиком, где он не может проводить измерения. Ультразвуковые датчики дальнего действия могут иметь ближние зоны, превышающие три фута, в то время как радарные датчики позволяют пользователям измерять весь путь до верхней части резервуара.
Низкочастотные ультразвуковые датчики, используемые для больших расстояний, обычно требуют большего отверстия в верхней части резервуара. Кроме того, у всех ультразвуковых датчиков есть ближняя зона или «мертвая зона», которая по существу представляет собой слепую зону рядом с датчиком, где он не может проводить измерения. Ультразвуковые датчики дальнего действия могут иметь ближние зоны, превышающие три фута, в то время как радарные датчики позволяют пользователям измерять весь путь до верхней части резервуара.
Конструкция резервуара или сосуда также может влиять на выбор технологии, так как от этого зависит способ установки датчика. Сигналы радара могут проникать через непроводящие материалы, такие как полиэтилен, стекловолокно и стекло. Это позволяет радарным датчикам измерять через пластиковые сосуды или смотровые стекла. Для ультразвукового датчика потребуется новое технологическое соединение, в то время как радар можно просто установить над сосудом и проводить те же измерения без вмешательства.
Условия процесса
У каждого процесса есть свои проблемы с получением точного измерения уровня. Стабильные, предсказуемые условия — роскошь в обрабатывающей промышленности. Изменение температуры, пена, отражательная способность продукта, пыль, конденсат, отложения и шум — вот лишь несколько потенциальных препятствий для получения точного измерения уровня. Пользователь должен найти лучшую технологию для своей задачи.
Температура
Радарные датчики уровня невосприимчивы к любым изменениям температуры, в то время как точность ультразвуковых датчиков может сильно различаться. Для борьбы с этим ультразвуковые преобразователи оснащены возможностью измерения температуры на преобразователе. Однако, если температура преобразователя значительно отличается от температуры воздуха вблизи поверхности продукта, измерение уровня будет отключено.
Состав газа
Подобно температуре, состав газа между датчиком и поверхностью жидкости влияет на звуковые волны ультразвуковых датчиков. Скорость звука сильно различается в зависимости от типа газа, что может привести к ошибкам измерения. Особенно этому подвержены пары кислот и растворителей, и это может сильно повлиять на точность ультразвуковых приборов. Радарные микроволны, с другой стороны, движутся с одинаковой скоростью независимо от воздушного пространства, поэтому измерение останется прежним.
Скорость звука сильно различается в зависимости от типа газа, что может привести к ошибкам измерения. Особенно этому подвержены пары кислот и растворителей, и это может сильно повлиять на точность ультразвуковых приборов. Радарные микроволны, с другой стороны, движутся с одинаковой скоростью независимо от воздушного пространства, поэтому измерение останется прежним.
| Тип | Скорость звука | Плотность (при 20ºC) |
| Водород | 1280 | 0,0899 |
| Гелий | 981 | 0,1785 |
| Воздух | 343 | 1.2041 |
| Кислород | 317,5 | 1,429 |
| Углекислый газ | 266 | 1,98 |
| Гексафторид серы | 129 | 6,63 |
Пена
Вспенивание является еще одним универсальным недостатком любой технологии бесконтактного измерения уровня, поскольку пена поглощает как микроволны, так и звуковые волны. Полное поглощение происходит редко, и в этих экстремальных случаях лучше всего подходит волноводный радар. В большинстве случаев с небольшим пенообразованием радар с частотой 80 ГГц может проводить измерения сквозь пену, как будто ее там и нет. Многим производителям ультразвуковых устройств потребуется стояк для того же применения.
Полное поглощение происходит редко, и в этих экстремальных случаях лучше всего подходит волноводный радар. В большинстве случаев с небольшим пенообразованием радар с частотой 80 ГГц может проводить измерения сквозь пену, как будто ее там и нет. Многим производителям ультразвуковых устройств потребуется стояк для того же применения.
Отражательная способность продукта
Высокая чувствительность радарных датчиков VEGA с частотой 80 ГГц позволяет им измерять даже самые неотражающие продукты. Жидкости и материалы, ранее не поддающиеся измерению с помощью старых радарных датчиков, теперь могут обеспечивать достаточно сильный сигнал для точного и надежного измерения уровня. В отличие от электромагнитных волн радара, механические волны ультразвука отражаются от большинства поверхностей, несмотря на их отражающие свойства.
Пыль, конденсат и отложения
Пользователи редко сталкиваются с пылью, конденсатом и отложениями в одном и том же приложении, но все три фактора оказывают одинаковое воздействие на ультразвуковые датчики. Звуковые волны, излучаемые ультразвуковыми датчиками, требуют среды для передачи энергии из одного места в другое. Пыль в воздухе представляет собой физический барьер для передачи энергии, что ослабляет амплитуду обратного сигнала. При конденсации или отложениях диафрагма преобразователя действует как среда, когда она вибрирует, создавая сигнал. Конденсация или отложения здесь ослабляют сигнал с самого начала. Тем не менее, некоторые ультразвуковые датчики с низкими частотами лучше справляются с такими ситуациями, потому что механическая волна вибрирует поверхность датчика, предотвращая попадание на нее капель воды или отложений.
Звуковые волны, излучаемые ультразвуковыми датчиками, требуют среды для передачи энергии из одного места в другое. Пыль в воздухе представляет собой физический барьер для передачи энергии, что ослабляет амплитуду обратного сигнала. При конденсации или отложениях диафрагма преобразователя действует как среда, когда она вибрирует, создавая сигнал. Конденсация или отложения здесь ослабляют сигнал с самого начала. Тем не менее, некоторые ультразвуковые датчики с низкими частотами лучше справляются с такими ситуациями, потому что механическая волна вибрирует поверхность датчика, предотвращая попадание на нее капель воды или отложений.
Радарные датчики не подвержены влиянию пыли, конденсата и отложений. Усовершенствованное программное обеспечение чувствительности в радарных датчиках VEGA 80 ГГц игнорирует любые сигналы, возвращающиеся к датчику слишком быстро, устраняя возможность ложного высокого уровня из-за конденсации и большей части отложений. Что касается пыли в воздухе, частицы пыли имеют размер от 0,5 до 1,0 микрометра, что слишком мало, чтобы влиять на микроволны радара с длиной волны от 3,5 до 4 мм. Это означает, что радар может продолжать измерения во время циклов заполнения и опорожнения в самых запыленных средах. Это позволяет радару точно измерять уровень в любых условиях с наличием пыли, конденсата или отложений.
Это означает, что радар может продолжать измерения во время циклов заполнения и опорожнения в самых запыленных средах. Это позволяет радару точно измерять уровень в любых условиях с наличием пыли, конденсата или отложений.
Шум
Громкий шум является обычным явлением при работе с сыпучими материалами и внутри силосов, поскольку падающий материал создает оглушающую атмосферу. Громкие шумы создают дополнительные звуковые волны, и в зависимости от частоты ультразвукового передатчика они могут мешать звуковым волнам, используемым для измерения. Это может привести к ошибкам измерения при наполнении, опорожнении и шумных процессах. Поскольку радарные датчики уровня используют радиомикроволны, шум не влияет на измерение.
Ультразвук против. Радарные датчики уровня | Блог
Существует тенденция противопоставлять ультразвуковые датчики уровня и радарные датчики уровня друг другу, хотя в действительности каждый датчик имеет свои преимущества и недостатки, которые отводят каждому датчику свое место. В этом блоге мы рассмотрим различия в работе этих двух технологий и рассмотрим приложения, для которых лучше всего подходит каждый датчик.
Что такое ультразвуковой датчик уровня?
Как следует из названия, ультразвуковые датчики уровня — это датчики уровня, которые работают, испуская всплеск звуковых волн в очень быстрой последовательности. Звуковые волны, излучаемые ультразвуковым датчиком уровня, движутся с известной скоростью (скоростью звука) к намеченной цели, где они отражаются от цели и возвращаются к датчику.
Используя количество времени, которое требуется звуковому импульсу, чтобы вернуться к датчику после отправки, рассчитывается расстояние между датчиком и измеряемым веществом или уровень вещества. С помощью других параметров, запрограммированных в датчике или системе управления, объем, вес или другие подобные измерения также могут быть рассчитаны на основе измеренного расстояния.
Для точного определения уровня целевого вещества ультразвуковые датчики уровня требуют беспрепятственного воздушного столба между датчиком и мишенью. Такие вещи, как физические препятствия, чрезмерная пена, тяжелые пары, густая пыль и легкие порошки, могут отклонять или поглощать сигнал или действовать как ложная поверхность, приводящая к ошибочным показаниям ультразвукового датчика уровня.
Обычное применение ультразвуковых датчиков уровня
Измерение уровня жидкости
Ультразвуковые датчики уровня чаще всего используются для измерения уровня в массе жидкости, такой как резервуар, колодец, яма, озеро или другой объем жидкости. Ультразвуковые датчики уровня также могут использоваться для измерения жидкости в нелинейных емкостях. Обычно для этого требуется диаграмма обвязки, чтобы приспособить показания к объему по мере того, как жидкость поднимается и падает.
Измерение уровня твердых частиц
Ультразвуковые датчики уровня являются отличным выбором для измерения уровня твердых частиц, особенно по сравнению с радарными датчиками уровня. Звуковые волны ультразвукового датчика уровня гораздо проще контролировать и измерять, чем электромагнитные волны радарного датчика уровня, когда они исходят из вещества с углом естественного откоса. Важно отметить, что использование ультразвукового датчика уровня для измерения уровня твердых частиц обычно уменьшает эффективный диапазон датчика вдвое. Кроме того, среда с пылью или порошком рассеивает звуковые волны, что приводит к ошибочным показаниям. Но ультразвуковой датчик уровня с соответствующим диапазоном, используемый в среде с небольшим содержанием частиц в воздухе или вообще без них, обеспечит чрезвычайно надежное измерение уровня твердых частиц.
Поток в открытом канале
Поток в открытом канале — еще одно применение ультразвукового датчика уровня. Открытые каналы являются основным средством транспортировки, фильтрации и учета воды, часто используемым на водоочистных сооружениях, мониторинге окружающей среды и оросительных каналах. Часто в этом типе применения ультразвуковые датчики уровня соединяются с соответствующим контроллером для расчета расхода.
Обнаружение присутствия и профилирование объектов
И последнее, но не менее важное: ультразвуковые датчики уровня прекрасно подходят для обнаружения присутствия и профилирования объектов. Если требуется обнаружение объектов в грязной или влажной среде, где цели довольно медленно движутся, можно использовать ультразвуковой датчик уровня. Они способны выдерживать суровые условия, что делает их подходящим выбором.
Автомойки — прекрасный пример использования ультразвуковых датчиков уровня для улучшения процессов и повышения эффективности. Вы когда-нибудь задумывались, как распылители, форсунки и губки находят точные места на вашем автомобиле при автоматической мойке? Ультразвуковой датчик обнаружения объектов IRU-2000 компании APG — ответ на этот вопрос! Узнайте больше о его возможностях здесь.
Радарные датчики уровня
Радарные датчики, напротив, работают не со звуковыми волнами, а с электромагнитными волнами. В этом ключевое различие между ультразвуковыми датчиками уровня и радарными датчиками уровня. Как и волны от ультразвуковых датчиков уровня, волны, излучаемые радарными датчиками уровня, отражаются от объектов и распространяются с известной скоростью (намного быстрее, чем ультразвуковые волны). В отличие от ультразвуковых звуковых волн, электромагнитные волны радара по-разному реагируют на определенные материалы, поскольку они отражаются от поверхности.
Радарные датчики уровня зависят от других переменных, чем другие датчики уровня. Радарные уровнемеры менее подвержены влиянию температуры, чем ультразвуковые датчики уровня, что повышает согласованность и точность. Радарные датчики уровня также хорошо подходят для специальных применений, таких как работа в вакууме или при более высоких давлениях (при условии, что корпус выдерживает это). Радарные датчики уровня также меньше подвержены влиянию пены, паров, порошков и пыли, которые могут мешать сигналам ультразвуковых датчиков уровня и приводить к ошибочным показаниям. Это может сделать радарные датчики уровня лучшим выбором для этих приложений.
Важным фактором для радарных датчиков уровня является диэлектрическая проницаемость материала цели. Материал с низкой диэлектрической проницаемостью не будет отражать электромагнитные волны, поэтому радар будет проходить насквозь. Эти материалы обычно непроводящие и имеют низкое содержание влаги, такие как сухие порошки и гранулы.
Справедливости ради следует отметить, что радар может обнаруживать многие из этих материалов, но энергия возвращающихся волн настолько мала, что первостепенное значение имеет точное выравнивание с сигналом. Это вводит такие методы, как волноводный радар или специальная антенна. Измерение материалов с низкой диэлектрической проницаемостью не всегда невозможно, просто очень сложно.
Common Radar Level Sensor Applications:
- Chemical / Petrochemicals
- Energy
- Food and Beverages
- Granular Solids
- Plastic Pellets
- Minerals and Mining
- Oil and Gas
- Asphalt Blending Tanks
- Alum and Wax Резервуары
- Фармацевтическая промышленность
- Целлюлозно-бумажная промышленность
- Песок и гравий
- Первичный и вторичный шлам
- Осветлители
- Сточные воды
Итог: ультразвуковой датчик против радарного
В конце концов, если ваше приложение прямолинейно, ультразвуковой датчик уровня является хорошим выбором для обеспечения высокого качества работы и долговечности. Для резервуаров, колодцев, каналов или резервуаров ультразвуковой датчик уровня можно настроить в соответствии с вашими потребностями.
Однако, как только в уравнение добавляются пена, пары, порошок, пыль, радарные датчики становятся ответом на ваши потребности в измерениях. Переменные окружающей среды не влияют на радарные измерения так, как на ультразвуковые датчики уровня.
Необходимое предостережение заключается в том, что хорошая технология всегда побеждает плохую. Да, радарные датчики уровня лучше, чем ультразвуковые датчики, в пенных и запыленных средах, но плохо спроектированный радарный датчик всегда будет плохо работать. Точно так же ультразвуковые датчики уровня обычно дешевле, чем радарные датчики уровня для более легкого измерения уровня жидкости или твердых частиц в чистом воздухе, но дешевый ультразвуковой датчик никогда не будет чем-то лучше, чем дешевый ультразвуковой датчик. Ультразвуковые и радарные датчики не конкурируют друг с другом, они дополняют друг друга.