ГОСТ 31507-2012 Автотранспортные средства. Управляемость и устойчивость. Технические требования. Методы испытаний
ГОСТ 31507-2012
МКС 43.060.01
Дата введения 2013-09-01
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 «Межгосударственная система стандартизации. Основные положения» и ГОСТ 1.2-2008* «Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Правила разработки, принятия, применения, обновления и отмены».
________________
* Вероятно, ошибка оригинала. Следует читать: ГОСТ 1.2-2009. — Примечание изготовителя базы данных.
Сведения о стандарте
1 РАЗРАБОТАН Федеральным государственным унитарным предприятием «Центральный ордена Трудового Красного Знамени научно-исследовательский автомобильный и автомоторный институт «НАМИ» (ФГУП «НАМИ»)
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол N 41-2012 от 24 мая 2012 г. )
)
За принятие стандарта голосовали:
Краткое наименование страны по МК (ИСО 3166) 004-97 | Код страны по МК (ИСО 3166) 004-97 | Сокращенное наименование национального органа по стандартизации |
Азербайджан | AZ | Азстандарт |
Армения | AM | Армгосстандарт |
| Беларусь | BY | Госстандарт Республики Беларусь |
Казахстан | KZ | Госстандарт Республики Казахстан |
Кыргызстан | KG | Кыргызстандарт |
Молдова | MD | Молдова-Стандарт |
Российская Федерация | RU | Ростехрегулирование |
Таджикистан | TJ | Таджикстандарт |
Узбекистан | UZ | Узстандарт |
4 Приказом Федерального агентства по техническому регулированию и метрологии от 27 ноября 2012 г. N 1258-ст межгосударственный стандарт ГОСТ 31507-2012 введен в действие в качестве национального стандарта Российской Федерации с 01 сентября 2013 г.
N 1258-ст межгосударственный стандарт ГОСТ 31507-2012 введен в действие в качестве национального стандарта Российской Федерации с 01 сентября 2013 г.
5 Стандарт подготовлен на основе применения ГОСТ Р 52302-2004
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта и изменений к нему на территории указанных выше государств публикуется в указателях национальных (государственных) стандартов, издаваемых в этих государствах.
Информация об изменениях к настоящему стандарту публикуется в указателе (каталоге) «Межгосударственные стандарты», а текст этих изменений — в информационных указателях «Межгосударственные стандарты». В случае пересмотра или отмены настоящего стандарта соответствующая информация будет опубликована в информационном указателе «Межгосударственные стандарты»
1 Область применения
Настоящий стандарт распространяется на автотранспортные средства (далее — АТС) категорий М, N и О в соответствии с [1]*, кроме АТС:
________________
* См. раздел Библиография, здесь и далее по тексту. — Примечание изготовителя базы данных.
раздел Библиография, здесь и далее по тексту. — Примечание изготовителя базы данных.
— имеющих максимальную скорость менее 40 км/ч;
— прицепов-тяжеловозов и полуприцепов-тяжеловозов;
— не предназначенных для эксплуатации на дорогах общего пользования.
2 Нормативные ссылки
В настоящем стандарте использованы нормативные ссылки на следующие стандарты:
ГОСТ 15467-79 Управление качеством продукции. Основные понятия. Термины и определения
ГОСТ 16504-81 Система государственных испытаний продукции. Испытания и контроль качества продукции. Основные термины и определения
ГОСТ 17697-72 Автомобили. Качение колеса. Термины и определения
Примечание — При пользовании настоящим стандартом целесообразно проверить действие ссылочных стандартов в информационной системе общего пользования — на официальном сайте Федерального агентства по техническому регулированию и метрологии в сети Интернет или по ежегодно издаваемому информационному указателю «Национальные стандарты», который опубликован по состоянию на 1 января текущего года, и по соответствующим ежемесячно издаваемым информационным указателям, опубликованным в текущем году. Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
Если ссылочный стандарт заменен (изменен), то при пользовании настоящим стандартом следует руководствоваться заменяющим (измененным) стандартом. Если ссылочный стандарт отменен без замены, то положение, в котором дана ссылка на него, применяется в части, не затрагивающей эту ссылку.
3 Термины и определения
В настоящем стандарте применены термины по ГОСТ 17697 и ГОСТ 16504, а также следующие термины с соответствующими определениями:
3.1 скорость автомобиля : Линейная скорость центра масс автомобиля.
3.2 заброс угловой скорости автомобиля : Превышение угловой скорости автомобиля над установившимся ее значением, возникающим при переходе от прямолинейного движения к движению по окружности.
3.3 усилие на рулевом колесе : Усилие, приложенное к ободу рулевого колеса в его плоскости, необходимое для его поворота или предотвращения поворота.
3.4 стабилизация рулевого управления: Свойство рулевого управления, заключающееся в самостоятельном возвращении выведенных из нейтрального положения управляемых колес и рулевого колеса в нейтральное положение, соответствующее прямолинейному движению АТС, после снятия усилия с рулевого колеса.
3.5 передаточное число рулевого управления : Отношение угла поворота рулевого колеса к среднему углу поворота управляемых колес, которое может определиться при любом значении угла поворота рулевого колеса.
3.6 прицеп (полуприцеп)-тяжеловоз: АТС категории О, предназначенное для перевозки неделимых крупногабаритных, в том числе негабаритных тяжеловесных, грузов массой 20 т и более.
3.7 специализированные автотранспортные средства: АТС, предназначенные для перевозки грузов одного типа.
3.8 габаритный радиус автомобиля: Радиус окружности, которую описывает на горизонтальной опорной поверхности наиболее удаленная от центра поворота точка автомобиля во время его движения по окружности. Проекции выступающих частей кузова типа зеркал заднего вида при измерении габаритного радиуса не учитывают.
Проекции выступающих частей кузова типа зеркал заднего вида при измерении габаритного радиуса не учитывают.
3.9 база автомобиля (прицепа): Расстояние между вертикальной поперечной плоскостью, проходящей через ось передних колес, и вертикальной поперечной плоскостью, проходящей через ось задних колес.
3.10 автотранспортные средства повышенной проходимости: АТС категории G по [1].
3.11 тип автотранспортного средства в отношении управляемости и устойчивости: АТС одной марки, модели и изготовителя, не имеющие существенного различия в отношении следующих характеристик:
а) категории;
б) колесной формулы;
в) типа привода;
г) массы и ее распределения по осям, высоте центра тяжести;
д) габаритных размеров;
е) базы;
ж) колеи;
з) электронных систем контроля устойчивости АТС;
и) рулевого управления:
1) конструкции элементов рулевого привода и геометрии их установки;
2) рулевого механизма и его передаточного отношения;
3) усилителя и (или) демпфера;
4) автоматических систем, влияющих на рулевое управление;
к) подвески и ее геометрии:
1) направляющих, демпфирующих и упругих элементов, стабилизаторов;
2) начальной регулировки параметров подвески;
3) автоматических систем изменения параметров подвески;
л) шин:
1) размера;
2) конструкции шин;
3) категории скорости и индекса грузоподъемности;
4) области применения (летние, зимние, всесезонные, универсальные, повышенной проходимости, спортивные, запасные временного использования, специальные).
4 Технические требования
4.1 Усилие на рулевом колесе
Усилие на рулевом колесе автомобиля не должно превышать значений, указанных в таблице 1.
Таблица 1 — Предельные величины усилий на рулевом колесе
Категория АТС | Усилие на рулевом колесе, , не более | |||
Неподвижный автомобиль | Движущийся автомобиль | |||
без рулевого усилителя | с рулевым усилителем | с исправным рулевым управлением | при отказе усилителя | |
200 | 60 | 150 | 300 | |
250 | ||||
350 | 250 | 200 | 450 | |
300 | 180 | 300 | ||
350 | 250 | 400 | ||
250 | 200 | 450* | ||
* Для грузовых автомобилей с двумя или большим числом мостов (осей) с управляемыми колесами допускается 500 | ||||
4. 2 Стабилизация рулевого управления
2 Стабилизация рулевого управления
4.2.1 Требования распространяются на АТС категорий М и N.
4.2.2 Угол поворота рулевого колеса после его освобождения не должен увеличиваться.
4.2.3 Управляемые колеса и рулевое колесо должны самостоятельно возвращаться в сторону нейтрального положения.
4.2.4 Максимальное значение угла поворота рулевого колеса, не достигшего нейтрального положения в течение 6 с после его освобождения, не должно превышать 30% величины угла поворота рулевого колеса, соответствующего движению АТС по окружности радиусом 50 м.
4.2.5 Процесс возврата рулевого колеса через нейтральное положение не должен быть колебательным. Допускается один переход рулевого колеса через нейтральное положение в любом из заездов.
4.3 Поперечная статическая устойчивость при испытаниях «опрокидывание на стенде»
4. 3.1 Требования распространяются на АТС категорий М, N, О (применительно к категории — только на АТС повышенной проходимости, применительно к категории О для полуприцепов — только в составе автопоезда).
3.1 Требования распространяются на АТС категорий М, N, О (применительно к категории — только на АТС повышенной проходимости, применительно к категории О для полуприцепов — только в составе автопоезда).
4.3.2 Показателями поперечной статической устойчивости против опрокидывания АТС являются:
— угол статической устойчивости — угол наклона опорной поверхности опрокидывающей платформы относительно горизонтальной плоскости, при котором произошел отрыв всех колес одной стороны одиночного АТС или всех колес одной стороны одного из звеньев седельного автопоезда от опорной поверхности;
— угол крена подрессоренных масс — угол между опорной поверхностью опрокидывающей платформы и поперечной осью подрессоренных масс, проходящей через центр масс АТС, полученный в результате наклона АТС на опрокидывающей платформе.
4.3.3 Величина угла статической устойчивости АТС против опрокидывания, полученная в результате испытаний, должна быть не меньше нормативного значения , зависящего от коэффициента поперечной устойчивости АТС.
Коэффициент поперечной статической устойчивости вычисляют по формуле
, (1)
где — колея колес, приведенная к поперечному сечению АТС в плоскости, проходящей через его центр масс (рисунок 1), мм;
— высота центра масс над опорной поверхностью, мм.
Рисунок 1 — Схемы определения величины приведенной колеи b
Рисунок 1 — Схемы определения величины приведенной колеи
Величину колеи колес полуприцепа вычисляют как среднее между серединами наружных колес задней оси (тележки) тягача и серединами наружных колес оси (тележки) полуприцепа.
4.3.4 Высоту центра масс вычисляют по формуле
, (2)
где — высота оси крена над опорной поверхностью в поперечном сечении, проходящем через центр масс, мм;
— боковое смещение центра масс, определяемое по результатам измерений боковой деформации шин, мм.
При отсутствии точных данных величина может быть принята равной статическому радиусу колеса АТС.
При определении соответствия величины угла нормативным значениям , АТС всех категорий, в зависимости от коэффициента поперечной устойчивости (большего или меньшего единицы), разделены на две группы, каждой из которых соответствует своя зависимость :
при 0,551,0, (3)
при 1,0, (4)
° при 0,55.
График зависимостей (3) и (4) для АТС различных категорий приведен на рисунке 2.
Рисунок 2 — Зависимость угла «альфа»(н) опрокидывания АТС на стенде от коэффициента поперечной устойчивости q(s) АТС различных категорий и типов
А — диапазон значений для автокранов, автобетоносмесителей, рефрижераторов, контейнеровозов категории , двухэтажных автобусов категории ;
— диапазон значений для автомобилей цистерн категории , прицепов цистерн категорий , ;
Б — диапазон значений для рефрижераторов, самосвалов категории , одноэтажных автобусов категории , прицепов категорий , ;
В — диапазон значений для автокранов, самосвалов, рефрижераторов категории , бортовых автомобилей категории , автобусов категории и прицепов категории ;
Г — диапазон значений для бортовых автомобилей категорий , , фургонов категории , автомобилей повышенной проходимости категории ;
Д — диапазон значений для автомобилей категории (за исключением автомобилей повышенной проходимости), прицепов категории .
Рисунок 2 — Зависимость угла опрокидывания АТС на стенде от коэффициента поперечной устойчивости АТС различных категорий и типов (зоны A, , Б, В, Г, Д приведены для справок)
Для автомобилей-контейнеровозов, предназначенных для эксплуатации на магистральных автомобильных дорогах общегосударственного значения (в том числе для международного сообщения), республиканского, областного (краевого) значения, при загрузке более 0,8 полного объема контейнера и расположении центра масс балласта в геометрическом центре контейнера минимальное допустимое значение равно 19°.
4.3.5 Угол крена подрессоренных масс определяют при угле наклона платформы, при котором происходит отрыв всех колес одной стороны одиночного АТС или всех колес одного из звеньев автопоезда от опорной поверхности. Максимальное допустимое значение угла крена подрессоренных масс в центре масс АТС, полученное в результате испытаний, не должно превышать предельных значений , заданных в зависимости от коэффициента поперечной устойчивости .
При этом АТС всех категорий (аналогично 4.3.4) разделены на две группы, каждой из которых соответствует своя зависимость :
— при
Стабилизация автомобиля при потере устойчивости и управляемости
Десять способов стабилизации автомобиля при потере устойчивости и управляемости.
Снос передних колес
Снос – боковое скольжение передних колес – чаще всего возникает при экстренных маневрах и прохождении поворота на критической скорости. Факторами, влияющими на это явление, могут быть профиль дороги (отрицательный уклон), боковой ветер, чрезмерное или недостаточное давление в шинах, низкий коэффициент сцепления. Явление сноса связано с тем, что боковая сила превосходит силу сцепления шины с дорогой. На заднеприводном автомобиле повернутые передние колеса создают эффект торможения, а толкающие задние – избыточную силу. Для переднеприводного автомобиля характерен снос передних колес из-за избытка или недостатка тяги при чрезмерных углах поворота колес.
Для полноприводных моделей характерны особенности одноприводных автомобилей, а разнонаправленная тяга передних и задних колес усиливает увод с траектории движения, особенно на «Джипах» с высоким профилем покрышки и всесезонным протектором.
Снос передних колес следует рассматривать как результат грубой ошибки водителя, так как он всегда сопровождается частичной потерей управляемости. Сигналом о совершенной ошибке служит «визг» передних покрышек на сухом покрытии. Поэтому «визжащий» на поворотах автомобиль (что обычно характерно для кинобоевиков и детективной литературы) свидетельствует о низком профессиональном уровне водителя.
Опасность сноса заключается в привычке многих водителей реагировать на частичную потерю управляемости рефлексом резкого торможения. Блокирование передних колес при сносе полностью лишает водителя возможности управлять автомобилем и приводит к его прямолинейному скольжению на заблокированных колесах. Большая часть ДТП с тяжкими последствиями на поворотах связана с этим явлением, и рассматривать черный след на асфальте, уходящий на обочину или встречную полосу, следует как «роспись страха» и отказ от управления из-за шокового состояния.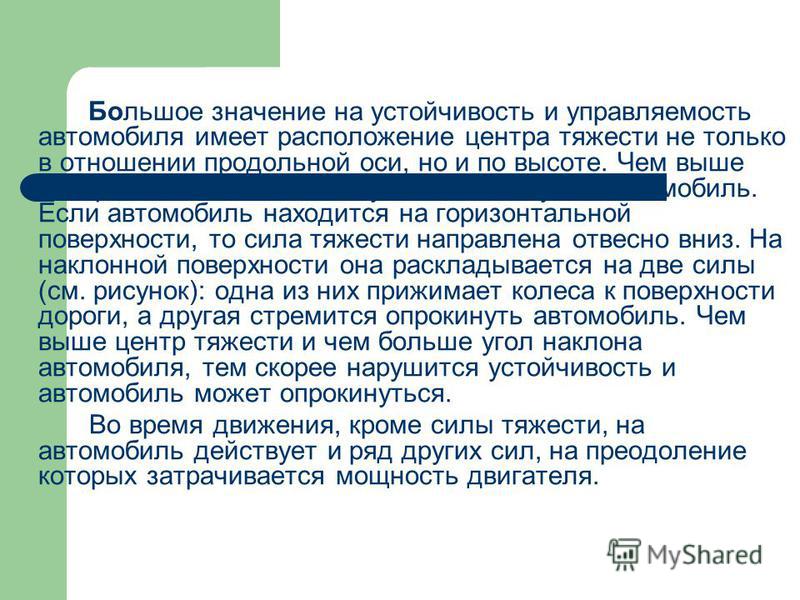
Прекратить или уменьшить снос передних колес можно двумя способами: либо увеличить загрузку передних колес, либо уменьшить угол их поворота, чтобы от скольжения перейти к качению.
Можно рекомендовать несколько приемов безопасности при сносе.
1. Торможение двигателем на постоянной передаче.
2. Торможение двигателем на понижающей передаче.
3. Легкое подтормаживание левой ногой для увеличения загрузки переднего наружного колеса. Режим торможения плавный, с постоянным тормозным усилием, исключающим блокирование колес.
4. Выравнивание управляемых колес (если это позволяют ситуация и ширина проезжей части).
Почти всегда снос следует рассматривать как результат ошибки в прогнозировании ситуации или в управлении. Профилактикой сноса является опережающая загрузка передних колес и выбор оптимальной скорости входа в дугу. При экстренных маневрах снос может возникать в результате резкого руления, торможения и комбинации этих действий. Желательна выработка навыков с «мягкой» структурой, исключающей резкое начало как в рулении, так и в торможении, несмотря на дефицит времени в критической ситуации.
Желательна выработка навыков с «мягкой» структурой, исключающей резкое начало как в рулении, так и в торможении, несмотря на дефицит времени в критической ситуации.
Гонщики экстракласса рекомендуют мягкое отпускание педали после экстренного торможения при подходе к повороту. Резкое отпускание тормозной педали провоцирует быстрое разжатие передних пружин и, как следствие, разгрузку передних колес в момент их поворота на дугу.
Занос малой амплитуды
Управляемость и устойчивость скоростных автомобилей
Управляемость и устойчивость скоростных автомобилей
При изучении движения автомобилей наиболее сложными вопросами являются управляемость и устойчивость. Для скоростных автомобилей эти вопросы имеют первостепенное значение, так как они связаны с безопасностью движения, на что с увеличением скорости должно быть обращено особенно большое внимание.Устойчивость автомобиля определяется его способностью противостоять боковому заносу и опрокидыванию.
Под управляемостью автомобиля понимается его способность сохранять заданное направление движения (что иногда называют держанием дороги), а при движении на повороте — точно следовать повороту управляемых колес.
Оба эти качества связаны между собой, так как плохая управляемость автомобиля приводит к потере устойчивости и заносу автомобиля. Совместное рассмотрение этих вопросов дает возможность выявить влияние основных конструктивных факторов как в том, так и в другом отношении.
Ниже будут рассмотрены основные условия управляемости и устойчивости автомобиля и факторы, от которых, они зависят, а также указаны способы повышения устойчивости и улучшения управляемости скоростных автомобилей.
Для того, чтобы выявить влияние отдельных факторов на управляемость и устойчивость автомобиля, необходимо рассмотреть отдельно движение автомобиля по прямой и движение на повороте.
При движении по прямой должна быть обеспечена хорошая управляемость, заключающаяся в том, что автомобиль должен сохранять заданное направление, не вызывая у водителя необходимости постоянно выправлять его. В тех случаях, когда колебания одного из колес передаются через органы подвески, рулевого управления и даже раму другому колесу, может наступить явление резонанса, что приводит к колебаниям всего передка автомобиля и вилянию передних колес. Такое виляние колес, нарушив управляемость автомобиля, может привести к потере устойчивости.
В тех случаях, когда колебания одного из колес передаются через органы подвески, рулевого управления и даже раму другому колесу, может наступить явление резонанса, что приводит к колебаниям всего передка автомобиля и вилянию передних колес. Такое виляние колес, нарушив управляемость автомобиля, может привести к потере устойчивости.
При движении на повороте наибольшее значение приобретает устойчивость автомобиля против заноса и опрокидывания под действием центробежной силы.
При переходе автомобиля к прямолинейному движению после завершения поворота большое значение для управляемости имеет способность автомобиля к быстрому выпрямлению, или так называемая стабилизация. Эта способность автомобиля также зависит от ряда конструктивных факторов.
Конструктивные факторы, влияющие на управляемость автомобиля
Жесткость рамы. Рама должна обладать жесткостью в горизонтальной и вертикальной плоскости. Для скоростных автомобилей наибольшее значение имеет жесткость в горизонтальной плоскости (по сравнению с автомобилями других видов), недостаток этой жесткости может привести к продольному смещению одного лонжерона по отношению к другому, что вызовет ухудшение управляемости. Это явление может произойти при торможении автомобиля с большой скорости, когда вследствие неодинаковой затяжки тормозов правой и левой сторон может появиться сила, стремящаяся сдвинуть один лонжерон по отношению к другому.
Это явление может произойти при торможении автомобиля с большой скорости, когда вследствие неодинаковой затяжки тормозов правой и левой сторон может появиться сила, стремящаяся сдвинуть один лонжерон по отношению к другому.
Чтобы противостоять скручиванию, рама должна обладать достаточной жесткостью также и в вертикальной плоскости.
Для обеспечения большой жесткости в горизонтальной плоскости рама должна иметь простую треугольную форму. Однако такая форма рамы не получила широкого распространения, так как на ней очень трудно размещать агрегаты силовой передачи. В некоторых случаях для обеспечения жесткости раме придают форму трапеции; большей же частью сохраняют форму рамы прямоугольной и добиваются наибольшей жесткости применением поперечных балок-траверс.
Жесткость рамы в вертикальной плоскости обеспечивается выбором соответствующих размеров и профиля лонжеронов. Значительное повышение жесткости дают к-образные и х-образные поперечные балки.
Эластичность шин. Особенностью шин является то, что, помимо деформации в радиальном направлении, они имеют под действием боковой силы (например, та повороте) некоторую деформацию в боковом направлении, так называемый боковой увод. В этом случае колесо катится не в своей плоскости, а под некоторым углом к ней, называемым углом бокового увода (рис. 131). Как показали исследования академика Е. А. Чудакова*, боковой увод колес оказывает большое влияние на устойчивость автомобиля.
Особенностью шин является то, что, помимо деформации в радиальном направлении, они имеют под действием боковой силы (например, та повороте) некоторую деформацию в боковом направлении, так называемый боковой увод. В этом случае колесо катится не в своей плоскости, а под некоторым углом к ней, называемым углом бокового увода (рис. 131). Как показали исследования академика Е. А. Чудакова*, боковой увод колес оказывает большое влияние на устойчивость автомобиля.
Рис. 131. Деформация шины под действием боковой силы |
Благодаря наличию бокового увода колес появляется стабилизирующий момент шины, стремящийся вернуть колесо в его плоскость качения, т. е. выравнять колесо в новом заданном им направлении, полученном в результате поворота.
Значительный боковой увод шин затрудняет управление и нарушает точность работы рулевого механизма. Поэтому для шин скоростных автомобилей боковая эластичность должна быть уменьшена по сравнению с боковой эластичностью шин обычных легковых автомобилей.
Величина боковой эластичности зависит от конструкции шин, ширины профиля шины и внутреннего давления в ней. Повышение внутреннего давления и увеличение жесткости боковин покрышек уменьшают боковую эластичность шин.
Радиальная эластичность шин влияет на управляемость обычно при больших скоростях движения, когда инерция неподрессоренных масс имеет большое значение. При этом от деформации шин и быстрого изменения этих деформаций могут возникать периодические колебания, которые в случае недостаточной чувствительности подвески передаются всем агрегатам автомобиля.
В том случае, когда внутреннее давление повышается относительно немного, шины скоростных автомобилей сохраняют большую чувствительность к неровностям дороги, чем рессорная подвеска, в особенности при наезде на небольшие неровности, которые встречаются на дорогах с усовершенствованным покрытием.
Подвеска автомобиля. Для обеспечения хорошей управляемости автомобиля подвеска должна смягчать толчки и обеспечивать быстрое гашение вызываемых ими колебаний; кроме того, она должна сохранять постоянство ширины колеи как передних, так и задних колес в моменты подъемов и опускания при наезде на неровности дороги.
Уменьшение веса неподрессоренных частей позволяет уменьшить жесткость упругих элементов подвески (рессор, пружин или стержней) и получить мягкую подвеску, почти полностью поглощающую толчки, передаваемые колесами. При значительном увеличении внутреннего давления в шинах скоростных автомобилей толчки от небольших неровностей дороги неполностью поглощаются шинами, а передаются на подвеску, которая должна обеспечить мягкость хода.
Неправильный выбор упругих элементов подвески часто способствует появлению боковых и продольных колебаний, вызывающих соответственно боковую и продольную качки и этим ухудшающих устойчивость автомобиля.
Для ослабления действия колебаний рессоры снабжаются амортизаторами, которые уменьшают амплитуду колебаний рессоры, не сокращая периода этих колебаний. Амортизаторы способствуют улучшению управляемости автомобиля, но они могут уменьшить степень свободы и повысить жесткость рессор. Устранение этих отрицательных последствий зависит от конструкции и регулировки амортизаторов, поэтому амортизаторы, подобранные соответственно параметрам свободных колебаний данной подвески, не должны намного увеличивать ее жесткости.
Описанные выше свойства подвески могут влиять главным образом на устойчивость в продольной плоскости, т. е. на уменьшение продольных колебаний. При рессорной подвеске каждая рессора подвергается скручиванию от боковых усилий, которые могут вызвать большие изменения в способности автомобиля держать дорогу.
Конструкция и способ крепления подвески влияют как на ее жесткость, так и на сохранение постоянства ширины колеи. При независимой подвеске постоянство ширины колеи наилучшим образом обеспечивается при качании колес в продольной плоскости. Сохранение постоянства ширины колеи необходимо для хорошей управляемости автомобиля. В случае изменения ширины колеи колеса скользят, перемещаясь в поперечном направлении, при этом часть силы сцепления оказывается использованной на это перемещение.
Использование сцепления колес в продольном направлении связано с использованием сцепления колес в поперечном направлении. Практически коэффициент сцепления колес с дорогой можно считать одинаковым в продольном и поперечном направлении. Таким образом, использование части силы сцепления на перемещение колес в поперечном направлении уменьшает сцепление колес в продольном направлении. Для ведущих колес автомобиля это уменьшение сцепления колес с дорого в продольном направлении приводит к пробуксовке и скольжению колес, вследствие чего может наступить занос автомобиля. В случае скольжения управляемых (передних) колес становится невозможным повернуть автомобиль и он будет скользить в прежнем направлении с повернутыми колесами; управляемость автомобиля при этом, конечно, теряется. Кроме того, при колебаниях подвески может возникать гироскопический момент, действующий в горизонтальной плоскости. Этот момент стремится повернуть колесо, что также ухудшает управляемость.
Таким образом, использование части силы сцепления на перемещение колес в поперечном направлении уменьшает сцепление колес в продольном направлении. Для ведущих колес автомобиля это уменьшение сцепления колес с дорого в продольном направлении приводит к пробуксовке и скольжению колес, вследствие чего может наступить занос автомобиля. В случае скольжения управляемых (передних) колес становится невозможным повернуть автомобиль и он будет скользить в прежнем направлении с повернутыми колесами; управляемость автомобиля при этом, конечно, теряется. Кроме того, при колебаниях подвески может возникать гироскопический момент, действующий в горизонтальной плоскости. Этот момент стремится повернуть колесо, что также ухудшает управляемость.
Оба указанных явления, происходящих при изменении ширины колеи, ухудшают управляемость и устойчивость автомобиля.
Механизмы управления и передние колеса. Как указывалось, для обеспечения хорошей управляемости рулевое управление скоростных автомобилей должно иметь относительно небольшое передаточное число и обладать обратимостью.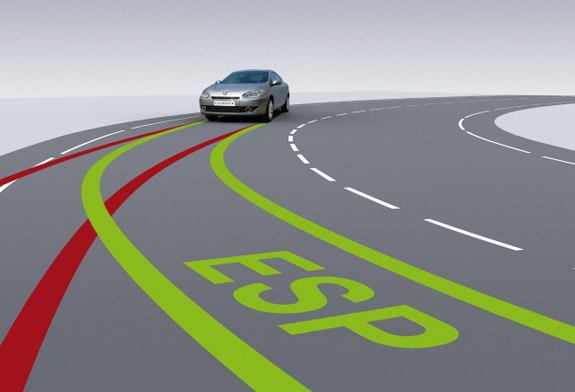 Кроме того, система тяг рулевого привода не должна передавать колебания от одного колеса к другому во избежание возможного резонанса колебаний и появления виляния передних колес.
Кроме того, система тяг рулевого привода не должна передавать колебания от одного колеса к другому во избежание возможного резонанса колебаний и появления виляния передних колес.
Легкость управления и стабилизация передних колес в значительной мере зависят от углов установки передних колес.
Углы развала и схода колес для скоростных автомобилей имеют такое же значение, как и для обычных легковых автомобилей.
Углы наклона шкворня назад (α) и вбок (β), определяющие стабилизацию управляемых колес, имеют для скоростных автомобилей весьма важное значение, и их величина отличается от величины соответствующих углов у современных серийных легковых автомобилей.
При наклоне шкворня назад его ось пересекается с дорогой в точке, лежащей впереди точки касания колеса с дорогой. В результате этого при движении автомобиля на повороте боковая реакция Y, возникающая от центробежной силы, приложенная в точке касания колеса с дорогой, образует стабилизирующий момент. Этот стабилизирующий момент М, равный Yc (рис. 132а), стремится вернуть колесо в нейтральное положение.
132а), стремится вернуть колесо в нейтральное положение.
Рис. 132. Углы установки передних колес |
Угол наклона шкворня вбок β (см. рис. 132б) также способствует стабилизации, так как благодаря этому наклону при поворачивании колес из нейтрального положения происходит подъем передней части автомобиля. В результате затраты работы на подъем передней части автомобиля накапливается некоторое количество энергии, использование которой способствует стабилизации колес.
У большинства современных легковых автомобилей углы наклонов шкворня назад и вбок имеют сравнительно небольшое значение. У автомобиля М-20 допускают даже отрицательный угол наклона шкворня назад; величина угла колеблется в пределах ±0,5°. У легковых автомобилей применяют небольшие углы наклона шкворней вследствие установки шин низкого давления, имеющих большую боковую эластичность; стабилизация управляемых колес при этом в основном происходит за счет бокового увода шин.
Для скоростных автомобилей, имеющих шины высокого давления, стабилизация управляемых колес должна обеспечиваться соответствующими углами их установки. Вследствие этого большинство гоночных автомобилей имеет относительно большую величину углов наклона шкворня назад и вбок. У большинства современных гоночных автомобилей угол наклона шкворня назад составляет 2—3°, а угол наклона шкворня вбок 7—9°.
Углы установки колес должны сохраняться во время работы автомобиля, так как от этого зависит стабилизация управляемых колес во время движения.
Нарушения в установке колес вследствие случайных толчков и ударов способствуют появлению вредных колебательных движений (виляние).
Причина виляния заключается в конструктивных особенностях передней части автомобиля. Многие наблюдения показывают, что, помимо чисто конструктивных факторов, виляние вызывается также неравномерностью накачки шин, низким давлением в них и неуравновешенностью колес.
Колесо автомобиля может быть уравновешено статически и динамически. Статически уравновешенное колесо находится в безразличном равновесии по отношению к своей оси вращения, и это равновесие не зависит от распределения веса относительно средней плоскости вращения колеса. Динамически уравновешенное колесо, наоборот, характеризуется тем, что центр тяжести его лежит в средней плоскости вращения. Для скоростных автомобилей особенно важно, чтобы все колеса были динамически сбалансированы. Поэтому противовесы, устанавливаемые при уравновешивании колес, должны иметь симметричное расположение относительно средней плоскости вращения колеса.
* Чудаков Е. А., акад. Влияние боковой эластичности колес на движение автомобилей, АН СССР, 1947.
Глава 7 УПРАВЛЯЕМОСТЬ И УСТОЙЧИВОСТЬ АВТОМОБИЛЯ
Основные понятия и определения
В предыдущих главах были рассмотрены эксплуатационные свойства автомобилей для случаев прямолинейного движения. Однако, в общем случае траекторию движения любого автомобиля всегда можно рассматривать как криволинейную с изменяющейся кривизной. Если кривизна траектории близка к нулю, то такое движение условно принято называть прямолинейным. Криволинейность движения обусловлена необходимостью совершать повороты в соответствии с задаваемой водителем траекторией, а также неизбежным отклонением автомобиля от заданной траектории вследствие действия внешних возмущений.
Криволинейное движение автомобиля характеризуется изменением во времени положения его продольной и вертикальной осей, а также наличием продольных и, главным образом, поперечных ускорений. Процесс изменения траектории состоит из входа в поворот, движения с постоянным радиусом (этот этап иногда может отсутствовать) и выхода из поворота. При входе в поворот и выходе из него кривизна траектории центра масс автомобиля меняется по закону близкому к линейному, что соответствует приблизительно равномерному повороту рулевого колеса. Количество криволинейных участков, их протяженность и радиусы кривизны на дорогах различных категорий существенно отличаются (см.табл.9)
Движение по грунтовым дорогам (V-ой категории) характеризуется почти беспрерывным воздействием водителя на рулевое колесо. Время условного прямолинейного движения в этом случае составляет всего 30…35 % от общего времени движения.
Способность АТС совершать движение по задаваемым траекториям оценивается двумя свойствами: управляемостью и устойчивостью.
Под управляемостью понимается эксплуатационное свойство ТС, характеризующее его способность изменять параметры движения под воздействием водителя.
Таблица 9
Относительная длина криволинейных участков на дорогах различных категорий, %
Управляемость автомобиля тесно связана со свойствами устойчивости. При движении автомобиля на него кроме управляющих сил действуют различного рода случайные силы за счет взаимодействия колес с неровностями дороги, наклона дороги, сил инерции, аэродинамических сил и др.
Эти силы, также их кинематические последствия называют возмущающими. Влияние возмущающих сил на характер движения различных автомобилей различно. Рассмотрение этих влияний на поведение автомобиля при движении и производится в разделе «устойчивость».
Под устойчивостью понимается эксплуатационное свойство ТС, характеризующее его способность сохранять заданные параметры движения или положения, т. е. свойство противодействовать силам, стремящихся отклонить его от заданных параметров движения или положения. Устойчивость и управляемость автомобиля взаимосвязаны, поскольку они определяются, в основном, одними и теми же конструктивными параметрами, такими как: компоновка автомобиля, габариты и масса, колея, база, координаты центра масс, точки нейтральной поворачиваемости, расположение сцепного устройства на тягаче и прицепе, распределение массы по осям, масса прицепного звена, особенности конструкции характеристики рулевого управления (размеры рулевого колеса, передаточное число рулевого механизма и всего привода, наличие усилителя), характеристики подвески и ее составных частей (упругих элементов, амортизаторов, направляющих устройств, стабилизаторов поперечной и продольной устойчивости), конструкция и выходные характеристики шин (конструкция каркаса и брекера, толщина и рисунок протектора, давление воздуха в шине, размеры колеса, коэффициент сцепления, нормальная, радиальная и крутильная жесткость и др.), конструкция и характеристики управляемого моста и его составных частей (балки, шкворней, поворотные цапфы, шаровые опоры, углы установки управляемых колес и осей их поворота).
Принципиальное же различие между понятиями управляемости и устойчивости заключается в том, что управляемость это способность автомобиля выходить на задаваемую водителем траекторию движения, а устойчивость – это способность сохранять движение по заданной траектории при действии возмущающих сил. Поэтому влияние одних и тех же параметров автомобиля на устойчивость и управляемость может быть различным. Например, с увеличением массы автомобиля увеличивается его момент инерции, а увеличение момента инерции относительно вертикальной оси, проходящей через центр масс, улучшает устойчивость при прямолинейном движении автомобиля и ухудшает управляемость при поворотах. То есть, выбор параметров автомобиля, обеспечивающих наилучшие характеристики управляемости и устойчивости, является задачей оптимизации.
Анализ особенностей криволинейного движения АТС в различных условиях позволяет разделить эти режимы на два вида:
1. Повороты автомобиля с малыми радиусами и не высокими скоростями движения;
2. Повороты автомобиля с большими радиусами и высокими скоростями.
Первый режим движения обычно относят к свойствам маневренности (поворачиваемости), второй – к управляемости. При повороте автомобиля с малыми скоростями возникающие центробежные силы незначительны, поэтому при рассмотрении свойств маневренности действие боковых сил на автомобиль не учитывается. При высоких скоростях движения боковые силы достигают значительной величины, поэтому их обязательно необходимо учитывать при рассмотрении свойств управляемости.
Движение автомобиля как механической системы может определяться траекторией какой-либо ее точки (направляющая точка), углом поворота некоторой прямой, связанной с автомобилем, относительно выбранной системы координат и перемещениями отдельных элементов автомобиля относительно направляющей точки.
При теоретическом рассмотрении вопроса управляемости одиночного автомобиля в качестве направляющей точки удобнее всего выбрать центр его масс, а для автопоезда – центры масс его звеньев. Зная ускорение центров масс, можно непосредственно определить силы инерции, действующие на систему.
При изучении управляемости в первом приближении можно пренебречь перемещением отдельных масс автомобиля или звеньев автопоезда относительно их центров масс за исключением поворотов управляемых колес или мостов. При более детальном рассмотрении управляемости это все следует учитывать, а также следует учитывать еще и повороты кузова в поперечной и продольной плоскостях и повороты звеньев а/п относительно тягача.
Поворот ТС может осуществляться за счет поворота управляемых колес относительно оси (шкворня) (передних или задних, или тех и других), поворота тележки, подводом избыточного тягового или тормозного моментов к колесам одного из бортов автомобиля, складыванием звеньев ТС. У подавляющего большинства автомобилей изменение траектории движения осуществляется в результате поворота передних управляемых колес. В результате взаимодействия шин с дорогой происходит изменение курсовых и боковых параметров автомобиля. Характер функциональной зависимости между управляющими воздействиями и реакциями на них автомобиля может служить оценкой его свойств как управляемого объекта.
Оценка управляемости ТС может быть произведена как экспериментальными методами, так и теоретически.
Ученые разработали автомобиль Maglev с повышенной устойчивостью
Ученые изготовили модели автомобилей Maglev с использованием технологии высокотемпературных сверхпроводников, которая может повысить стабильность и вдохновить на дальнейшие разработки для решения проблем Maglev. Фотография предоставлена: Ванминь Ян и др.С конца 60-х годов ученые разрабатывают, строят и эксплуатируют «летающие поезда» или системы на магнитной подвеске («Маглев»).Тем не менее, научно-фантастическая технология по-прежнему сталкивается с проблемами повышения стабильности, управляемости и рентабельности, но ученые постоянно совершенствуются.
Поезда на магнитной подвеске, которые используют электромагнитную силу для преодоления гравитации, заинтриговали ученых в течение последних нескольких десятилетий. Поднимаясь на несколько сантиметров над рельсами, вагоны поезда не имеют физического контакта и трения с рельсами, что позволяет развивать скорость более 400 миль в час.Внедрение маглев в городских районах — или даже по всей стране — может превратить пятичасовую поездку в 40-минутную поездку, а также заново изобрести мировую инфраструктуру.
Первые действующие низкоскоростные системы Maglev, построенные в Англии и Германии в середине 80-х, больше не существуют. Однако новейшая система со скоростью 300 миль в час, построенная в 2002 году в Шанхае, Китай, возродила политический и потребительский интерес к этой технологии, несмотря на нынешние большие затраты на строительство. Хотя город планирует расширить 18-мильную трассу до 100 миль для World Expo в 2010 году, технология должна стать более экономически жизнеспособной с доказанной безопасностью для массового внедрения.
В рамках исследования группа ученых (W. Yang et al. ) из Китая недавно разработала и построила новую модель автомобиля Maglev, которая может предложить значительные преимущества в стабильности по сравнению с существующими технологиями. Ученые использовали специально изготовленные высокотемпературные сверхпроводники (ВТСП) для автомобилей и постоянные магниты для треков, которые демонстрируют более высокую силу левитации и большую стабильность, чем когда постоянные магниты используются как на треке, так и в автомобиле.Несмотря на то, что модели автомобилей имеют длину всего около 12 см и ширину 4 см, они продемонстрировали стабильное движение без трения по 10-метровой трассе.
«Расположение магнитов позволило легко получить однородное распределение магнитного поля по длине дорожки», — писал W. Yang et al. в недавнем выпуске Superconductor Science and Technology . «Модель может быть использована [для] быстрой транспортировки студентов и взрослых».
В модели HTSC автомобили приводятся в движение комбинацией линейных двигателей на гусеницах и алюминиевых роторов автомобилей.Фотоэлектрические переключатели рядом с линейными двигателями экономят энергию, гарантируя, что двигатели работают только тогда, когда автомобиль движется через них.
Большие магнитные поля модели HTSC на трассе также обеспечивают сильную направляющую силу и хорошее магнитное распределение, которое не позволяет автомобилям выезжать за пределы трассы. Поскольку эта магнитная конфигурация обеспечивает большую силу сопротивления, она также устраняет необходимость в каком-либо внешнем контроле устойчивости.
Используя жидкий азот для охлаждения ВТСП до -196 ° C, ученые исследовали различные методы охлаждения, чтобы оптимизировать левитационные и направляющие силы.Команда обнаружила, что процесс с полевым охлаждением, который охлаждает магниты внутри автомобиля после того, как автомобиль находится на трассе, обеспечивает значительную стабильность, но также требует дальнейшего исследования.
Образец цитирования: Yang, W. M., et al. Небольшая модель автомобиля Маглев, использующая объемные сверхпроводники YBCO. Наука и технологии сверхпроводников . 19 (2006) S537-S539.
Лиза Зига, Copyright 2006 PhysOrg.com. Все права защищены. Этот материал нельзя публиковать, транслировать, переписывать или распространять.
Исследователи улучшают конструкцию автономных лодок
Цитата : Ученые конструируют более устойчивую машину Маглев (2 июня 2006 г.) получено 23 января 2021 г. с https: // физ.org / news / 2006-06-science-maglev-car-better-stable.html
Этот документ защищен авторским правом. За исключением честных сделок с целью частного изучения или исследования, никакие часть может быть воспроизведена без письменного разрешения. Контент предоставляется только в информационных целях.
Устойчивость самолета
Устойчивость самолета- Устойчивость в основном определяется как способность самолета сохранять / возвращаться к исходной траектории полета.
- Позволяет самолету поддерживать единообразные условия полета, восстанавливаться после сбоев и минимизировать рабочую нагрузку пилота
- Самолеты спроектированы с положительной динамикой, что также подразумевает положительную статику.
- Более устойчивая в правых поворотах за счет склонности к левому повороту
- Оси самолета — это воображаемые линии, проходящие через самолет; считается опорными точками
- Продольная ось: простирается от носа до хвоста через фюзеляж
- Боковая ось: проходит от законцовки крыла до законцовки крыла
- Вертикальная ось: проходит через центр фюзеляжа сверху вниз
- Летательный аппарат считается устойчивым, если нет вращательного движения или тенденции относительно какой-либо оси самолета.
- Справочник пилота по авиационным знаниям
Взаимосвязь сил, действующих на самолет - Справочник пилота по аэронавигационным знаниям
Векторы силы во время стабилизированного набора высоты - В установившемся полете принципы полета демонстрируют взаимосвязь между силами, действующими на самолет [Рис. 1].
- Проще говоря: тяга равна лобовому сопротивлению, а подъемная сила равна массе, но более точно:
- Сумма всех восходящих составляющих сил (не только подъемной силы) равна сумме всех нисходящих составляющих сил (не только веса)
- Сумма всех передних составляющих сил (не только тяги) равна сумме всех обратных составляющих сил (не только сопротивления)
- Это уточнение касается того, как каждый раз, когда траектория полета самолета не является горизонтальной, векторы подъемной силы, веса, тяги и сопротивления должны быть разбиты на два компонента.
- Векторы силы во время стабилизированного набора высоты показывают, что тяга имеет восходящую составляющую [Рис. 2]
- В глиссаде часть вектора веса направлена по прямой траектории полета и, следовательно, действует как тяга.
- Справочник пилота по авиационным знаниям
Взаимосвязь сил, действующих на самолет - Справочник пилота по аэронавигационным знаниям
Векторы силы во время стабилизированного набора высоты
- Справочник пилота по авиационным знаниям
Типы статической устойчивости - Статическая устойчивость — начальная тенденция самолета
- Стабильность может быть описана как положительная, отрицательная или нейтральная [Рисунок 3].
- Тенденция к возврату в исходное положение
- Если самолет рыскает или буксует, внезапный натиск воздуха на фюзеляж и поверхности управления быстро заставляет самолет вернуться в исходное направление.
- Тенденция остаться на новой должности
- Если самолет входит в поворот, и пилот отпускает рычаги управления, и самолет остается в этом повороте, но не выкатывается и не становится круче
- Тенденция к дальнейшему отклонению от исходного положения
- Если самолет перекатывается на большой угол крена, отпускание рычагов управления приводит к тому, что самолет продолжает катиться дальше
- Справочник пилота по авиационным знаниям
Типы статической устойчивости - Стабильность с демпфированием и без него
- Динамическая устойчивость — это тенденция самолета с течением времени
- Для обеспечения динамической устойчивости самолет должен иметь положительную статику [Рисунок 4]
- Положительная динамическая устойчивость — это тенденция самолета смещаться в исходное положение после нарушения
- Нейтральная динамическая устойчивость — это тенденция самолета возвращаться в исходное положение после того, как его перевели в новое положение
- Отрицательная динамическая устойчивость — это тенденция самолета отклоняться от исходного положения после нарушения
- Продольная ось — это воображаемая линия, идущая от носа до хвоста самолета, движение вокруг этой оси называется креном, и им управляют элероны
- Продольная устойчивость — это тенденция самолета вернуться к уменьшенному углу атаки.
- Осуществляется лифтами и рулями направления
- Авторы:
- Прямые крылья (отрицательные)
- Стреловидность крыла (положительная)
- Фюзеляж (минус)
- Горизонтальный стабилизатор (наибольший положительный)
- Аэродинамический центр на корме C.Г. — стабилизирующий момент
- Аэродинамический центральный нападающий C.G. дестабилизирующий момент
- Боковая ось представляет собой воображаемую линию, идущую от кончика крыла до кончика крыла, движение вокруг этой оси вызывает подъем или опускание носовой части самолета и вызывается перемещением рулей высоты
- Боковая устойчивость — это способность самолета сопротивляться крену.
- Двугранный эффект
- Двугранный вид очевиден, когда самолет катится, создавая боковое скольжение (при условии отсутствия руля направления)
- Одно из крыльев ниже другого, что создает разницу в угле атаки каждого крыла.
- Угол атаки нижнего крыла увеличен, что заставляет его создавать большую подъемную силу и, следовательно, подниматься, в то время как противоположное верно для верхнего крыла [Рис. 7]
- В результате самолет откатывается от бокового скольжения, таким образом сопротивляется крену и пытается вернуть крылья на уровень .
- Использование руля направления сгладит поворот и преодолеет эти силы, а также другие силы, такие как неблагоприятное рыскание.
- Двугранный эффект
- Стреловидность крыла
- Боковое скольжение создает более прямой относительный ветер по отношению к крылу со стреловидностью против ветра, что создает откат к уровню крыльев [Рис. 6].
- Стреловидность крыла
- Вертикальная ось представляет собой воображаемую линию, идущую от вершины плоскости до низа плоскости, вращение вокруг этой оси называется «рысканием» и управляется рулем направления
- Тенденция противостоять рысканию
- Момент рыскания
- Осуществляется через рули направления
- Эффект руля
- Устойчивость вокруг вертикальной оси
- Вертикальный хвост выполняет это
- У вас должно быть больше площади поверхности позади ЦТ, чем перед ним
- Соединение поперечной и направляющей осей вызывает голландский валок
- Голландский крен — это комбинированное рыскание-крен самолета, которое может рассматриваться только как неудобство, если только не разрешено продвижение на большие углы крена.
- Большие крены и рыскания могут стать опасными, если их не погасить должным образом
- Возмущение бокового скольжения приведет к крену самолета
- Угол крена, в свою очередь, вызывает боковое скольжение в противоположном направлении
- Этот постоянный компромисс между боковым скольжением и углом крена не является нестабильным.
- Голландский валок может быть возбужден грубым воздухом или поперечным направлением контроля.
- После наведения он гасится за счет нормальной устойчивости самолета.
- Плохие характеристики крена голландского самолета могут сделать самолет восприимчивым к колебаниям, вызванным пилотом (PIO)
- Боковое движение PIO чаще всего встречается, когда пилот преследует очередь в посадочной конфигурации.
- Также называется асимметричной нагрузкой
- Р-фактор представляет собой сложное взаимодействие между относительным ветром самолета и относительным вращательным ветром.
- Нисходящая лопасть имеет более высокое AoA и, следовательно, увеличенную тягу
- Гироскопическая прецессия — это приложенная сила (которая перемещает пропеллер из плоскости его вращения) ощущается под углом 90 ° от этого места в направлении вращения
- Гироскопическая прецессия более распространена на самолетах с хвостовым колесом на более низких скоростях с высокими настройками мощности.
- В самолете с хвостовым колесом на разбеге, когда хвост поднимается вверх, он создает тенденцию к левому повороту, поскольку верхняя часть гребного винта «толкается» вперед, а нижняя «тянется» назад.
- Когда нос поднимается для набора высоты, он создает усилие вправо.
- Когда нос опускается для спуска, он создает усилие влево
- В вертолетном сообществе гироскопическая прецессия также называется фазовой задержкой
- Крутящий момент — это сила, возникающая, когда вращение лопасти по часовой стрелке заставляет самолет вращаться против часовой стрелки
- Наибольшее значение при низких скоростях полета при высоких настройках мощности и большом угле атаки.
- Ветер штопором ударяет в хвост (руль направления) слева
- Управляемость и маневренность — противоречащие друг другу идеи, и конструкторы должны уравновесить эти два понятия при создании самолета.
- В авиации нет ничего бесплатного, и цена за более высокую подъемную силу всегда выше сопротивления
- Позволяет легко маневрировать и выдерживать нагрузки
- Зависит от:
- Масса
- Система управления полетом
- Конструкционная прочность
- Тяга
- Способность воздушного судна реагировать на управляющие воздействия с учетом положения и траектории полета
- Неблагоприятный рыскание
- Неблагоприятный рыскание вызвано несбалансированным сопротивлением между крыльями, которое вызывает рыскание на летательном аппарате, противоположном направлению поворота.
- Каждый раз, когда используются элероны, возникает обратный рысканье.
- Когда подвесной элерон отклоняется вниз, подъемная сила на внешнем крыле увеличивается, а подъемная сила на внутреннем крыле уменьшается, что приводит к крену самолета.
- При повороте направо: правый элерон вверх, левый элерон опущен
- При повороте налево: левый элерон вверх, правый элерон опущен.
- Однако, поскольку отклоненный вниз элерон увеличивает подъемную силу аэродинамического профиля, он также увеличивает сопротивление.
- Когда элероны отклоняются вниз, подъемная сила и лобовое сопротивление увеличиваются (особенно на внешнем крыле)
- Это замедляет подвесное крыло, и необходимо использовать руль направления в направлении поворота, чтобы преодолеть повышенное сопротивление внешнего крыла, чтобы это сопротивление не удерживало крыло назад.
- При отсутствии руля направления нос будет отклоняться наружу (за пределы поворота) при повороте в поворот.
- Мяч указывает на рыскание, скользя внутрь поворота, который мы называем скольжением
- Руль направления используется для компенсации неравномерного сопротивления крыльев, которое создается только при отклонении элеронов.
- Несбалансированное сопротивление существует только тогда, когда элероны отклонены, и самолет находится в процессе крена
- Это также говорит о том, что когда самолет находится в устойчивом крене, например, при повороте, элероны нейтральны, поэтому подъемная сила на двух крыльях уравновешена.
- Сопротивление также сбалансировано
- В этом случае руль направления обычно не нужен при повороте.
- Кроме того, поскольку самолет находится в установившемся состоянии (крен), отклонение элеронов обычно не требуется для поддержания этого состояния.
- Чем дальше крылья (элероны), тем больше будет момент сопротивления.
- Неблагоприятный рыскание
- Используя аэродинамические силы тяги, сопротивления, подъемной силы и веса, пилоты могут управлять безопасным полетом.
- Почему имеет значение неблагоприятное рыскание:
- При повороте скорость сваливания увеличивается
- Если вы испытываете резкий рыскание без правильного поворота руля направления для противодействия, значит, вы не скоординированы.
- Если вы станете медленным, нескоординированным с более высокой скоростью сваливания, то вы можете оказаться в штопоре.
Фактически, учитывая только горизонтальный полет и нормальный набор высоты и глиссирование в установившемся состоянии, все же верно, что подъемная сила, обеспечиваемая крылом или винтом, является основной восходящей силой, а вес — основной направленной вниз силой. - Тенденция к левому повороту — явление, в первую очередь затрагивающее одномоторные винтовые самолеты
- Хотя во время полета на реактивный самолет действуют различные силы, вы можете считать эти силы незначительными.
- Все еще что-то ищете? Продолжить поиск:
Стабильность
Устойчивость Устойчивость и управляемость| Кроме поддержки в полете лифтом и движением
по воздуху тягой, самолет должен быть устойчивым и управляемым
поскольку он может свободно вращаться или перемещаться по трем осям.Эти оси могут быть
мысли как оси, вокруг которых вращается самолет, как колесо
делает. Каждая ось перпендикулярна двум другим, и все три пересекаются.
в центре тяжести самолета (ЦТ). Точка, вокруг которой летит самолет.
Вес, равномерно распределенный или сбалансированный, считается ЦТ самолета. Ось, проходящая через фюзеляж в продольном направлении от носа к хвосту — продольная ось. Ось, проходящая через фюзеляж от законцовки крыла до законцовки крыла — боковая ось.Ось, проходящая вертикально Через фюзеляж в центре тяжести проходит вертикальная ось (рис. 3-8). Вращение вокруг продольной оси самолета — крен, вращение вокруг его поперечная ось — тангаж, а вращение вокруг вертикальной оси — рыскание. |
Вследствие их способности вращаться вокруг этих осей, все самолеты должны обладать устойчивостью в различной степени для безопасности и легкости операции.Нестабильный самолет требует, чтобы пилот постоянно изменять давление на органы управления полетом и, следовательно, было бы трудно контролировать. Термин «остойчивость» означает способность самолета возвращаться сам по себе в исходное состояние полета или нормальный полет отношение после того, как оно было нарушено какой-то внешней силой. Мяч в круглая чаша считается устойчивой, потому что после того, как ее отодвинули в сторону он будет катиться взад и вперед, пока, наконец, не остановится в центре чаши.
Если стрела без оперенного хвоста выпущена из лука, он обычно будет раскачиваться или падать из стороны в сторону во время движения, так как там не создается сила, чтобы вернуть его в исходную точку при первом перемещении. Стрелу можно сделать устойчивой, добавив кусочки пера рядом с задняя часть его вала. Затем, когда стрела выстрелит и начнет раскачиваться, поверните, или рыскание, воздух ударяет в хвостовые перья под углом и отклоняет конец стержня из пера, чтобы стрелка вернулась на прямую траекторию.Этот корректирующее действие продолжается, пока стрелка достаточно вперед движение.
Само по себе крыло самолета тоже неустойчиво. Это перевернулось бы
над и продолжайте переворачивать конец за концом, пока он падает на землю. подобно
нестабильная стрела, нестабильному крылу нужны какие-то «рулевые перья»
чтобы сбалансировать его и держать на прямом курсе. Как устойчивая стрела,
у самолетов есть свои «хвостовые оперения» в виде горизонтальных и вертикальных
поверхности, расположенные в задней части фюзеляжа.Эти поверхности являются горизонтальными
стабилизатор и вертикальный стабилизатор или плавник.
Если бы все восходящие подъемные силы на крыле были сосредоточены в одном
место, там будет установлен центр лифта, который обычно называют
центр давления (ЦП). К тому же, если весь вес самолета
были сосредоточены в одном месте,
| быть центром тяжести или, как его еще называют, центром тяжести
(CG). Однако редко CP и CG расположены в одной и той же точке. Расположение этих центров по отношению друг к другу имеет значительную влияет на устойчивость самолета. Если центр подъема крыла сила (CP) направлена вперед от центра тяжести самолета (CG) — самолет всегда имел склонность задирать нос и имел врожденную тенденцию войти в состояние остановки. Поэтому большинство самолетов предназначены для располагайте их ЦТ немного впереди ЦТ, чтобы создать нос вниз тенденция, поэтому у самолета будет естественная тенденция к наклону вниз вдали от состояния сваливания (рис.3-9). Это обеспечивает функцию безопасности в характеристиках самолета. |
| Когда самолет летит в пределах своего диапазона нормальных скоростей,
воздушный поток оказывает на горизонтальный стабилизатор направленную вниз силу; таким образом, в
при нормальной крейсерской скорости он частично компенсирует присущую носу тяжесть
самолет. Кроме того, на многих самолетах линия тяги расположена
ниже, чем ЦТ.В этой ситуации тяга винта обеспечивает
Сила подачи носа вверх, чтобы помочь преодолеть врожденную тяжесть носа. С участием
В этом сбалансированном состоянии самолет обычно остается в
горизонтальный полет. Однако при уменьшении мощности и уменьшении воздушной скорости
воздушный поток оказывает меньшее давление на горизонтальный стабилизатор. В
в то же время уменьшается сила тяги носа вверх (Рис. 3-10).
Из-за этого неуравновешенного состояния нос самолета будет иметь тенденцию опускаться.
и самолет автоматически войдет в режим снижения. Во время снижения скорость полета начнет увеличиваться. В следствии, сила, направленная вниз на горизонтальный стабилизатор, увеличивается, вызывая нос подниматься. Этот процесс будет продолжаться снова и снова, если самолет динамически стабильна (и если пилот не предпринимает никаких действий, чтобы остановить его), но с каждым колебанием движение носа вверх и вниз становится меньше и Меньше. В конце концов, посадка и воздушная скорость самолета стабилизируются. |
| Как и оперенная стрела, самый важный фактор
обеспечение курсовой устойчивости — это эффект флюгирования, создаваемый
фюзеляж и вертикальное оперение самолета (рис.3-11). Он сохраняет
самолет направился навстречу относительному ветру. Если самолет рыскает или скользит,
внезапный натиск воздуха на поверхность фюзеляжа и киля быстро
возвращает самолет в исходное направление полета. Обычно при прямом и горизонтальном полете крылья с каждой стороны самолеты имеют одинаковые углы атаки и развивают одинаковую величину лифта. Это состояние боковой балансировки обычно держит самолет уровень. Однако иногда порыв воздуха нарушает этот баланс, увеличивая подъемная сила на одном крыле и заставляет самолет катиться вокруг своей продольной ось.Хорошо спроектированный самолет имеет определенные конструктивные особенности, которые противодействуют это кратковременное неуравновешенное состояние и вернуть самолет к крыльям уровень отношения. |
| Большинство самолетов спроектированы так, что концы крыльев
выше, чем корни крыла, прикрепленные к фюзеляжу. Таким образом, угол вверх
образованный крыльями, называется двугранным и обычно составляет всего несколько градусов
(Инжир.3-12). Крен самолета, вызванный порывами ветра, постоянно корректируется двугранностью крыльев. Если одно крыло опускается ниже другой, когда самолет летит прямо, у него будет другой отношение по отношению к набегающему воздуху. В результате пониженный крыло имеет больший угол атаки и, следовательно, большую подъемную силу, чем поднятое крыло и, следовательно, поднимется. Если из-за этого подъема крыло выходит за горизонтальное положение, противоположное крыло тогда будет иметь больший угол атаки и большую подъемную силу.Динамически устойчивый самолет будет колебаться все меньше и меньше, и в конечном итоге вернется в исходное положение по мере ослабления колебаний. Хотя устойчивость самолета желательна, она должна не быть настолько сильным, чтобы пилот не смог преодолеть присущую ему устойчивость. Пилот должен иметь возможность управлять самолетом или маневрировать по своему усмотрению. три оси самолета. |
Крен, тангаж и рыскание, движение самолета вокруг его продольная, поперечная и вертикальная оси контролируются тремя рули.Это будет обсуждаться в главе Эффект и Использование элементов управления.