Принцип работы и устройство электродвигателей?
Под электродвигателем подразумевается электротехнический механизм, который используется для получения механической энергии из электричества. Такое устройство распространено во всех сферах деятельности, включая промышленность и бытовую технику. Назначением техсредства считается приведение в движение присоединенных к нему механизмов. Есть большое количество модификаций электрического двигателя, но все они работают на одних и тех же принципах и имеют обязательный набор узлов.
Общая информация
Электродвигатели получили широкое распространение из-за нескольких качеств. Среди них:
- универсальность. Механизмы используются в различных сферах;
- простота и надежность;
- большой ресурс.
Используется несколько видов электродвигателей. По типу питания они могут быть постоянного и переменного тока. В первом случае электроэнергию двигатель получает от аккумулятора, батареи или блока. При переменном типе двигателя соединение идет напрямую к электросети.
При переменном типе двигателя соединение идет напрямую к электросети.
Принцип работы может быть синхронным и асинхронным. У механизма с синхронизацией есть обмотка на роторе, на которую подается напряжение. Асинхронные модели не обладают такими элементами и отличаются сниженной вращательной скоростью из-за отсутствия статорного магнитного поля.
Сам процесс взаимодействия осуществляется на основе влияния магнитного поля на элементы двигателя и приведение их во вращение. При поступлении в электродвигатель энергии внутри возникает электромагнитная индукция, которая в виде силы передается на вращающие сегменты.
Устройство
У электродвигателя есть стандартный набор узлов. Элементы:
- неподвижная часть в виде статора;
- в качестве подвижной части выступает ротор, который и формирует вращательный момент;
- коллектор. Он требуется для 2 функций, включая переключение тока при скользящих контактах, а также показатель роторного угла;
- скользящие контакты представлены в виде щеток, который находятся вне ротора и прижаты к коллектору.

Из электродвигателя формируется механизм электропривода, необходимый для функционирования оборудования.
Любой электродвигатель нуждается в двух основных частях, в частности подвижной и неподвижной части. Статорная часть включает в себя корпус, который создается из материалов немагнитного типа, медную обмотку с проволочным сечением квадратного или круглого типа, сердечник, собираемый из пакетов пластин стали электротехнического типа. В качестве немагнитных материалов выступает чугун или алюминиевый сплав.
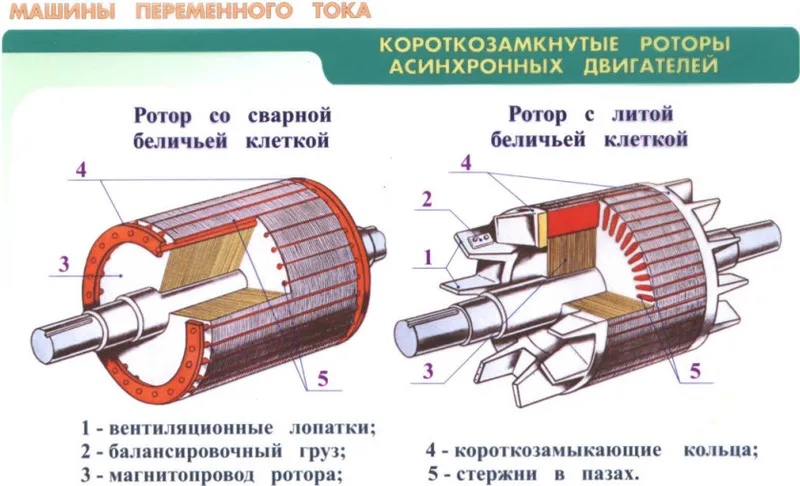
Роторная часть состоит из сердечника, у которого конструкция формируется из стальных листов с пазовой алюминиевой заливкой, что дает создать набор стержней. Также используются торцевые кольца, необходимые для замыкания конструкции, и электродвигательный вал, запрессовываемый в роторную часть из стали высокой прочности.
Принцип работы
Весь принцип работы основан на электромагнитной индукции, при которой осуществляется взаимодействие двух полей статора с роторными магнитными полями. Это дает привести в движение подвижную часть, что приводит к появлению вращательного момента. Именно с его помощью часть, которая относится к подвижным, приводит к появлению механической энергии, возникающей при вращении.
Это дает привести в движение подвижную часть, что приводит к появлению вращательного момента. Именно с его помощью часть, которая относится к подвижным, приводит к появлению механической энергии, возникающей при вращении.
Такой вариант работы одинаков для всех типов электрических двигателей.
Особенности
Электродвигатели при изготовлении получают определенный набор характеристик, который заложен с помощью конструкционных особенностей и использования модификаций.
Основные показатели, определяющие возможности двигателя электрического типа:
- мощность;
- частота вращения в об/м;
- крутящий момент, который также называется вращающим;
- потребление тока;
- КПД в %;
- сетевое напряжение;
- частота сети.
При выборе требуется учитывать не только показатели, но и тип электрического двигателя. Асинхронные и синхронные двигатели используются в разных сферах из-за своих особенностей. Первый тип также отличается тем, что может иметь многофазное функционирование.
Первый тип также отличается тем, что может иметь многофазное функционирование.
На рынке встречается много модификаций, которые значительно отличаются от стандартного простейшего двигателя на электрической основе. В большинстве ситуаций производители пытаются повысить КПД или устранить основные недостатки механизма. Но принцип работы остается одним для всех моделей.
Электродвигатель работает на основе электромагнитной индукции, когда подвижная и неподвижная часть устройства контактируют с друг другом электромагнитными полями. Это приводит к тому, что возникает вращательный момент, то есть электрическая энергия превращается в механическую. На рынке представлено много разнообразных моделей электродвигателей, но все они работают на одинаковых принципах и имеют однотипные составные части.
✔ Электродвигатели — типы, устройство, принцип работы, параметры
Электрическим двигателем называют машину, благодаря работе которой электроэнергия преобразуется в механическую, используемую, чтобы приводить в движение механизмы. Электрический двигатель – главный элемент электропривода, который управляет процессом преобразования энергии. Особенности его работы изучает электромеханика, одним из основоположников которой стал Майкл Фарадей, создавший первую модель электродвигателя.
Электрический двигатель – главный элемент электропривода, который управляет процессом преобразования энергии. Особенности его работы изучает электромеханика, одним из основоположников которой стал Майкл Фарадей, создавший первую модель электродвигателя.
Электропривод может работать в нескольких режимах. В некоторых из них происходит процесс обратного преобразования, электропривод в этом случае выполняет функции генератора. Двигатель может создавать движения нескольких видов – например, вращающиеся, линейные другие. Чаще всего, когда говорят об электродвигателе, имеют в виду вращающее устройство, поскольку оно получило наибольшее распространение.
Конструкция двигателя и принцип работы
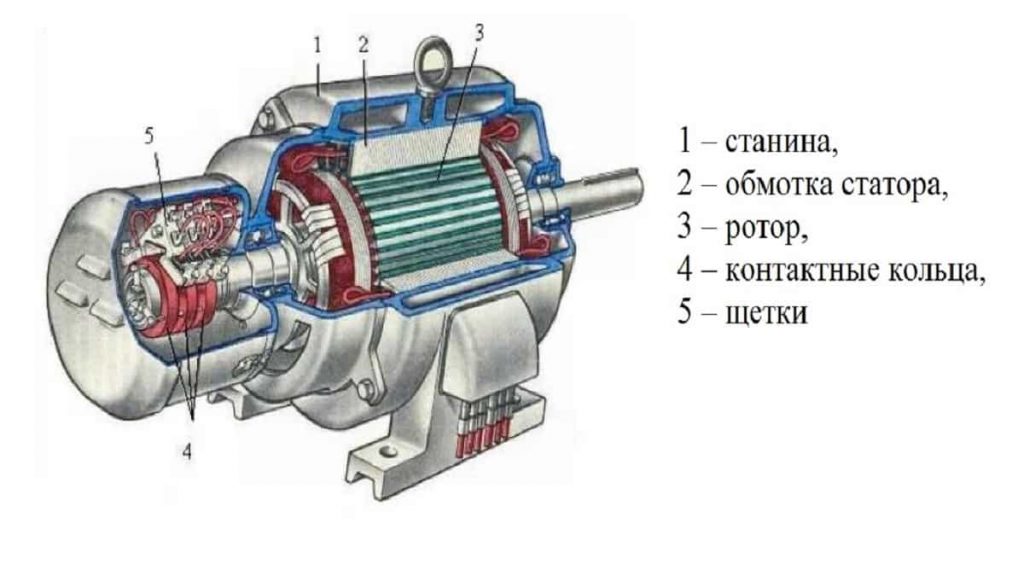
Основные элементы конструкции устройства – это ротор (элемент, который вращается) и статор (неподвижная часть). Ротор, как правило, находится внутри статора, однако встречает и иная конструкция. Такие электродвигатели, у которых ротор находится снаружи конструкции, называют обращенными.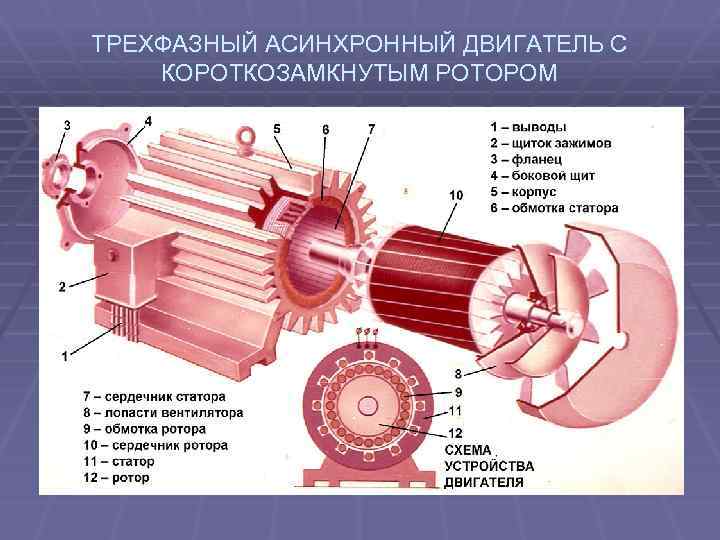
Устройства работают по следующему алгоритму:
- В соответствии с законом Ампера, сила действует на проводник с электрическим током в магнитном поле.
- В согнутом состоянии, когда проводник принимает форму рамки и находится в магнитном поле, обе его стороны принимают прямой угол по отношению к этому полю и испытывают силы, направленные противоположно.
- Эти силы образуют крутящий момент, который вращает рамку.
- На якоре, где образуется электродвижущая сила, есть несколько витков, необходимых для обеспечения большего постоянного момента.
- Магнитное поле создается не только магнитами, но и электромагнитами – намотанными на сердечник проводами. Ток, который протекает в рамки, усиливает движение тока в эти провода, благодаря чему и создается магнитное поле.
Типы электродвигателей
Классификация электродвигателей довольно разнообразна, две основные группы – коллекторные и бесколлекторные устройства.
Коллекторные двигатели (с механической коммутацией)
Конструкция устройства предполагает, что есть как минимум одна обмотка, которая подсоединена к коллектору.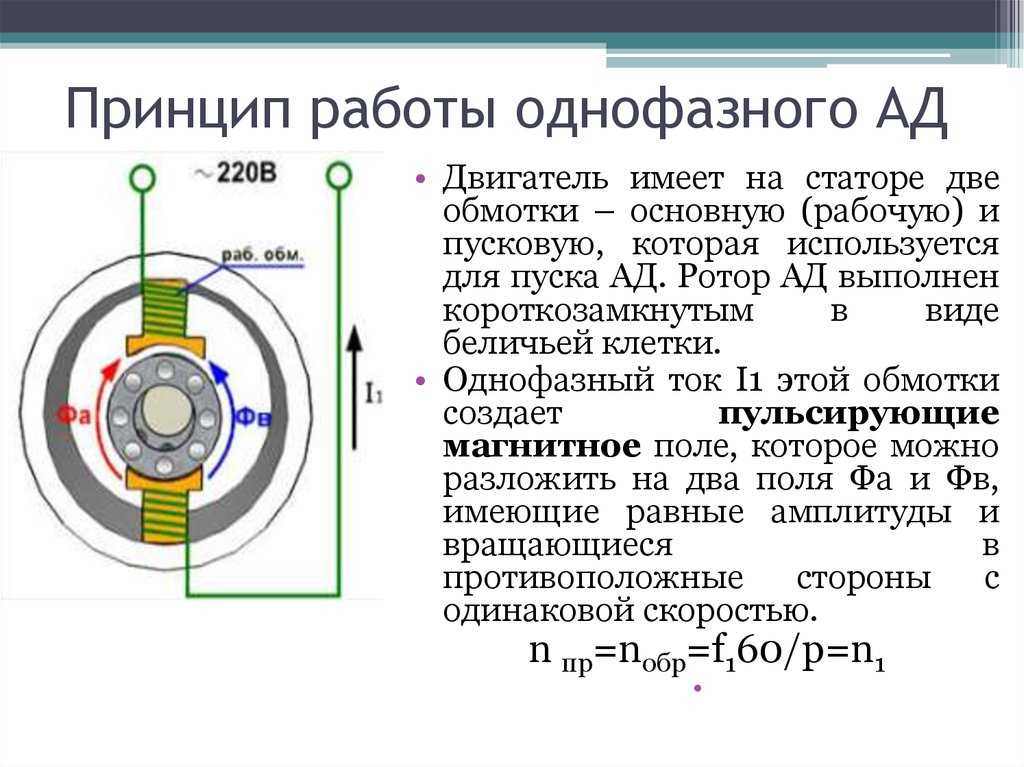 Этот элемент используется для переключения обмоток, а также выполняет функции датчика, который определяет положение ротора, являющегося якорем. Коллекторные двигатели могут быть:
Этот элемент используется для переключения обмоток, а также выполняет функции датчика, который определяет положение ротора, являющегося якорем. Коллекторные двигатели могут быть:
- Универсальные – они работают как на переменном токе, так и на постоянном. Особенно часто подобные устройства используются в бытовых приборах, а также в инструменте, предназначенном для ручного использования. Модели отличаются легкостью, простотой в управлении, компактными размерами, поэтому получили широкое распространение.
- Устройства постоянного тока, работа которых основана на преобразовании его электрической энергию в механическую. Они отличаются быстродействием, простотой управления, высоким пусковым моментом, возможностью плавной регулировки частоты вращения. Однако коллектор достаточно быстро изнашивается, поэтому агрегаты отличаются ограниченным сроком службы. Кроме того, его коллекторно-щеточные элементы нуждаются в регулярном обслуживании.
В целом коллекторные двигатели отличаются довольно простым устройством и невысокой стоимостью, поэтому они широко используются как в промышленных агрегатах, так и в бытовых. Их скорость можно регулировать в широких пределах, а для крутящего момента характерны хорошие показатели даже на малых оборотах.
Их скорость можно регулировать в широких пределах, а для крутящего момента характерны хорошие показатели даже на малых оборотах.
Бесколлекторные модели
Обмотки бесколлекторных двигателей располагаются на статоре. Типы таких устройств:
- Асинхронные модели очень распространены в промышленности. Они отличаются надежностью, долгим сроком службы, простотой обслуживания и низкой себестоимостью. Недостаток конструкций – сложная процедура регулирования частоты вращения.
- Синхронные модели используются там, где требуется точно управлять скоростью вращения, а также в случаях, когда важным становятся максимальные КПД и мощность.
Поскольку из конструкции двигателя исключен коллектор, она отличается большей простотой, по сравнению с коллекторными моделями. Другие достоинства – высокий КПД, хорошее охлаждение, а также возможность работы в воде, при условии использования специальных водоотталкивающих смазок.
Специальные модели
Серводвигателем называют устройство, которое позволяет фиксировать рабочий орган в требуемых положениях и перемещать его в соответствии с заданными параметрами. Серводвигатели не выделяют в отдельную группу, поскольку в этом качестве используются устройства как постоянного, так и переменного тока, в которых установлен датчик положения ротора. Чтобы привести устройство в действие и управлять им, необходима особая система управления, которая обычно создается специально для сервопривода.
Серводвигатели не выделяют в отдельную группу, поскольку в этом качестве используются устройства как постоянного, так и переменного тока, в которых установлен датчик положения ротора. Чтобы привести устройство в действие и управлять им, необходима особая система управления, которая обычно создается специально для сервопривода.
Дополнительные категории
В каждой из перечисленных категорий выделяют дополнительные подкатегории.
- Коллекторные модели могут быть универсальными либо репульсионными. Этот термин означает двигатель переменного тока, между ротором и статором которого есть трансформаторная связь. Частоту вращений такого электродвигателя можно регулировать в широких пределах.
- Двигатели постоянного тока могут различаться типом включения обмотки. Он может быть независимым, параллельным, комбинированным.
- Асинхронные двигатели бывают одно-, двух- или трехфазными.
Каждая из перечисленных моделей используется для выполнения конкретных задач и для разных типов устройств. Информация о возможностях двигателя, его типе указана в маркировке каждого агрегата.
Информация о возможностях двигателя, его типе указана в маркировке каждого агрегата.
Параметры работы электродвигателя
Надежность электродвигателя и экономичность его работы зависят от правильного подбора его параметров. При оценке устройства определяющими становятся следующие критерии:
- вращающий момент;
- мощность;
- частота вращения;
- КПД;
- напряжение;
- момент инерции ротора.
Дадим подробную характеристику каждому из этих критериев.
Вращающий момент
Термином называют физическую величину, измеряемую в Ньютонах на метр, которая является произведением силы на плечо силы. Для ее расчета радиус вектор, направленный от точки приложения силы к оси вращения, умножается на вектор силы. Формула выглядит следующим образом: M = Fr.
Мощность
Мощность демонстрирует, какую работу двигатель совершает за определенную единицу времени. С точки зрения электротехники мощность рассматривается как полезная механическая мощность на электровалу.
КПД
Характеристика демонстрирует, насколько эффективна система преобразования электроэнергии в механическую. Коэффициент (η) рассчитывается как соотношение между полезной энергией (P2) и потраченной (P1): η = P2 ÷ P1.
Эффективность работы электродвигателя может снижаться по следующим причинам:
- Проводники с током нагреваются, происходит потеря тепла – в этом случае говорят об электрических потерях.
- Излишнее намагничивание сердечника вызывает появление гистерезиса (ответной реакции системы) и вихревых токов.
- Дополнительные потери, обусловленные зубчатой формулой статора и ротора, в результате чего появляются гармоники магнитного поля.
КПД определяется типом устройства, а диапазон его вариаций – от 10% до 99%. Этот показатель является одним из определяющих для расчета мощности двигателя.
Частота вращения
Параметр определяется как число оборотов, которое совершает двигатель за минуту. Частота вращения используется для расчета мощности двигателя насоса, однако показатель меняется, в зависимости от того, происходят измерения под нагрузкой либо на холостом ходу. Параметр рассчитывается по формуле: n = 30 × ω ÷ pi.
Параметр рассчитывается по формуле: n = 30 × ω ÷ pi.
Момент инерции
Критерий демонстрирует степень инертности при движении вокруг своей оси. Основная характеристика представляет собой сумму произведений квадрата расстояния от материальных точек до оси на их массы. Момент инерции рассчитывается формулой J = ∑ r2 × dm, в которой m обозначает массу объекта.
Момент инерции взаимосвязан с моментом силы. Это соотношение выражается следующей формулой: M — J × ε, в которой epsilon – это угловое ускорение, рассчитываемое по формуле dω ÷ dt.
Расчетное (номинальное) напряжение
Термином называют базовое напряжение, под которое спроектирована электрическая сеть. Под номинальным напряжением понимается расчетные величины, спроектированные разработчиком и рассчитанные на работу оборудования в нормальном режиме. Перечень возможных вариантов перечислен в ГОСТ, характеристика всегда указывается в описании механизмов.
Электрическая константа времени
Время, необходимое после подачи на двигатель напряжения, за которое ток может достигнуть 63% от своего максимального финального значения. Значения рассчитываются по формуле te = L ÷ R.
Значения рассчитываются по формуле te = L ÷ R.
Сравнение параметров внешне коммутируемых двигателей
Рассматривая использование электродвигателей как тяговых компонентов транспортных средств, можно сделать вывод, что в автомобилестроении наиболее целесообразно применение синхронного реактивного электрического двигателя, оснащенного постоянными магнитами. Его применение позволяет достичь высокой мощности и КПД в широком диапазоне. Сравнение проводилось по следующим параметрам:
- Способность сохранять постоянную мощность во всем скоростном диапазоне.
- Момент к току статора.
- КПД во всем диапазоне.
- Вес.
Применение электродвигателей
Электрические двигатели считаются крупнейшими потребителями энергии. Около 45% энергии, потребляемой во всем мире, приходится именно на них. Устройства используются во всех отраслях промышленности, а также нашли широкое применение в быту. Чаще всего двигатели применяются в следующих сферах:
- В промышленности на их основе работают вентиляторы и насосы разной мощности.
 Без электрических двигателей невозможна работа компрессоров, конвейеров. Кроме того, они используются в качестве движущей силы для других промышленных устройств и оборудования.
Без электрических двигателей невозможна работа компрессоров, конвейеров. Кроме того, они используются в качестве движущей силы для других промышленных устройств и оборудования. - Строительство. Электродвигатели обеспечивают нормальную работу системы отопления, бесперебойную и безопасную работу лифтов. Устройства применяются для оборудования вентиляционных систем, насосов и конвейеров, систем кондиционирования.
- Потребительские товары. С работой электрических двигателей сталкивается каждый потребитель, поскольку они обеспечивают доступность многих благ цивилизации. Например, работа электродвигателя лежит в основе функций, которые выполняют холодильники и бытовые кондиционеры, миксеры, стиральные машины. Без этих агрегатов невозможна работа ноутбуков, поскольку благодаря им обеспечивается система охлаждения.
В таблице приведены основные технологии и устройства, работа которых невозможна без применения электрических двигателей.
|
Устройства |
Сферы использования |
|
Насосы |
Применяются при организации водоотведения, водоснабжения в жилых, промышленных, коммерческих и других зданиях. Используются в системах перекачки воды, при организации полива в сельском хозяйстве. Насосы используются для перекачивания нефтепродуктов как в местах добычи, так и на нефтеперегонных предприятиях. Необходимы для обустройства канализации – централизованный и некоторых типов автономной. |
|
Вентиляция |
Электромоторы устанавливаются как в бытовые вентиляторы, так и в промышленные системы приточно-вытяжной вентиляции. |
|
Компрессоры |
Используются в холодильных, морозильных установках на предприятиях, занимающихся производством и хранением продуктов питания. Устанавливаются в пневматических системах и в устройствах, предназначенных для распределения сжатого воздуха. Применяются в системах перекачки газа, его сжижения. |
|
Смешивание |
Используются на прокатных станах, для обработки металлов и камней. Широко применяются в текстильной промышленности – как для производства тканей, так и для их обработки, сушки, стирки. Необходимы не производствах, технологические процессы которых предполагают взбалтывание и смешивание – например, на пищевых или на лакокрасочных предприятиях. Используются в прессовом оборудовании, без которого невозможно производство пластиков или алюминия. |
|
Транспорт |
Электродвигатели широко используются во всех типах подъемных механизмов – таких как грузовые и пассажирские лифты, эскалаторы. На основе двигателей работают необходимые практически на каждом производстве лебедки и конвейеры. Устройства используются во всех транспортных средствах – в общественном транспорте (автобусах, троллейбусах, трамваях), в личном автотранспорте, а также железнодорожном. |
|
Перемещения под углом |
Двигатели применяются в конструкции вентилей, предполагающих открывание и закрывание, а также для установки положения. |


Производители
Перечислим некоторые ведущие российские и зарубежные предприятия, которые занимаются производством разных типов электродвигателей. Ведущие российские производители:
- Армавирский электротехнический завод – одно из старейших предприятий, которое занимается выпуском электродвигателей с середины 20 века, постоянно усовершенствуя конструкции.
- Владимирский электромоторный завод, являющийся частью крупного холдинга «Русэлпром», который объединяет несколько крупных российских предприятий, работающих над производством электротехнической продукции. В состав концерна входят также предприятия Санкт-Петербурга, Смоленской области.
Кроме того, на рынке широко востребована продукция зарубежных производителей, таких как General Electric, Emerson Electric и других.
Продукция от ведущих производителей, выпускающих конструкции всех типов, представлена в интернет-магазине «Мир привода». Мы предлагаем только качественные современные агрегаты, отличающиеся простотой и удобством использования, высокой эффективностью. В нашем каталоге можно подобрать устройства для решения любых задач, связанных с бесперебойной работой электрических двигателей.
Библиографический список
- ГОСТ 27471-87 Машины электрические вращающиеся. Термины и определения.
- И.В.Савельев. Курс общей физики, том I. Механика, колебания и волны, молекулярная физика.-М.:Наука, 1970.
- ГОСТ 29322-92 (МЭК 38-83) Стандартные напряжения.
- ГОСТ 16264.0-85 Электродвигатели малой мощности
- А.И.Вольдек, В.В.Попов. Электрические машины. Машины переменного тока: Учебник для вузов.- СПб.: Питер, 2007.
- Paul Waide, Conrad U. Brunner. Energy-Efficiency Policy Opportunities for Electric Motor-Driven Systems. International Energy Agency Working Paper, Energy Efficiency Series.
 : Paris, 2011.
: Paris, 2011. - Dr. J. Merwerth. The hybrid-synchronous machine of the new BMW i3 & i8 challenges with electric traction drives for vehicles. BMW Group, Workshop University Lund: Lund, 2014.
Нормы монтажа двигателя – Приводы и автоматика
Правильная установка и монтажное положение двигателя имеют важное значение для обеспечения высококачественной работы, эффективной работы и максимальной надежности. Однако иногда возникает путаница в отношении множества различных способов установки двигателя.
Существует два разных стандарта — NEMA и IEC, — которые вы увидите, глядя на места установки электродвигателя. Хотя в целом они сопоставимы, между ними есть небольшие различия.
Стандартное монтажное положение IEC размещает распределительную коробку на верхней части двигателя, известное как монтажное положение IM B3 в раме IEC (или F3 в рамах NEMA). С другой стороны, стандартное монтажное положение NEMA обозначается как F1, при этом распределительная/кабелепроводная коробка расположена с левой стороны двигателя, обращенной к выходному валу.
Конструкция большинства двигателей такова, что они обычно могут работать во многих монтажных положениях, если не указано иное. Однако некоторые монтажные положения требуют дополнительных модификаций конструкции для достижения оптимальной производительности. Например, при использовании на открытом воздухе валом вверх или вниз может потребоваться сверление дополнительных дренажных отверстий, защита от капель и более прочные подшипники для поддержки больших нагрузок. Не думайте, что вы можете прикрутить любой двигатель в любом положении!
Ниже приведена иллюстрация типовых монтажных положений электродвигателя. Являетесь ли вы установщиком, инженером или специалистом по сопровождению, это обязательный справочник.
| IM Ref# | Вал | Ножки | Крепление |
|---|---|---|---|
| IM 1001 / IM B3 | Горизонтальный | Напольный | Ножной |
| IM 1071 / IM B8 | Горизонтальный | на потолке | Ножка |
| IM 1051 / IM B6 | Горизонтальный | Настенный монтаж (ножки слева, если смотреть со стороны привода) | Опора |
| IM 1011 / IM V5 | Вертикальный | На стене | На ножке |
| IM 1061 / IM B7 | Горизонтальный | Настенный монтаж (ножки справа, если смотреть со стороны привода) | Опора |
| IM 1031 / IM V6 | Вертикальный | на стену | Ножка |
| IM 3001 / IM B5 | Горизонтальный | Фланец | |
| IM 2001 / IM B35 | Горизонтальный | Напольный | Фланцевый |
| IM 3011 / IM V1 | Вертикально (лицом вниз) | Фланец | |
| IM 2011 / IM V15 | Вертикально (лицом вниз) | На стене | Фланец |
| IM 3031 / IM V3 | Вертикально (лицом вверх) | Фланец | |
| IM 2031 / IM V36 | Вертикально (лицом вверх) | На стене | Фланец |
| IM 3601 / IM B14 | Горизонтальный | Торцевой | |
| IM 2101 / IM B34 | Горизонтальный | На стене | Лицевой |
| IM 3611 / IM V18 | Вертикально (лицом вниз) | Лицо | |
| IM 2111 / IM V58 | Вертикально (лицом вниз) | На стене | Лицевая сторона |
| IM 3631 / IM V19 | Вертикально (лицом вверх) | Лицом к лицу | |
| IM 2131 / IM V69 | Вертикально (лицом вверх) | На стене | Лицевая сторона |
| IM 9101 / IM B9 | Горизонтальный | Резьбовые стяжки | Без кожуха приводного конца |
| IM 1201 / IM B15 | Горизонтальный | опоры и резьбовые стяжки | Без кожуха приводного конца |
| IM Ref# | Вал | Ножки | Крепление |
Drives and Automation Ltd – это независимый универсальный магазин, предлагающий полный спектр продуктов промышленной автоматизации и услуг по системной интеграции. Мы предоставляем приводные модули, двигатели, системы управления и решения PLC / SCADA. Предоставляются независимые консультации по наиболее подходящему продукту в зависимости от области применения. Кроме того, мы предлагаем различные аксессуары для приводов. Мы являемся агентом в Великобритании по ассортименту двигателей переменного и постоянного тока Sicme Motori.
Мы предоставляем приводные модули, двигатели, системы управления и решения PLC / SCADA. Предоставляются независимые консультации по наиболее подходящему продукту в зависимости от области применения. Кроме того, мы предлагаем различные аксессуары для приводов. Мы являемся агентом в Великобритании по ассортименту двигателей переменного и постоянного тока Sicme Motori.
КПД электродвигателя и количество фаз
Введение
Чуть более 200 лет назад мы впервые научились создавать магнитные поля с помощью электричества. Сегодня эта концепция широко используется в электродвигателях во многих отраслях промышленности. Учитывая, что на разработку этого невидимого и неинтуитивного явления затрачивается относительно мало времени, неудивительно, что улучшения эффективности все еще находят. В этой статье основное внимание уделяется оптимизации обычно используемого бесщеточного двигателя постоянного тока с постоянными магнитами (PMDC). Эти двигатели стали широко популярными из-за их эффективности и высокой удельной мощности.
Повышение эффективности двигателей постоянного тока приветствуется, поскольку затраты на энергию растут, а такие приложения, как электромобили и промышленная автоматизация, стремятся делать больше с меньшими затратами. Обсуждаемая оптимизация направлена на повышение эффективности и эффективности электродвигателей за счет изменения их конструкции и способа привода.
Для простоты обсуждение здесь будет относиться к линейным двигателям, и, чтобы избежать некоторых нелинейностей и других осложнений, это обсуждение будет сосредоточено на двигателях с воздушным сердечником или двигателях, в статоре которых не используется железо. При этом концепции здесь выходят за рамки упрощенных примеров — например, роторные двигатели и двигатели с железным сердечником.
Линейный бесщеточный двигатель постоянного тока с постоянными магнитами
Справочная информация
(Для читателей, знакомых с анатомией двигателей постоянного тока, этот раздел может не понадобиться).
Основы анатомии
Открытие электромагнетизма показало, что перемещение электрических зарядов в пространстве приводит к возникновению вокруг них магнитных полей. Инженеры взяли это явление и построили машины, которые фокусировали генерируемые поля друг на друга для создания силы и движения. Мы называем медные обмотки этих машин статором двигателя. Статор питается и генерирует магнитные поля, которые взаимодействуют со второй частью двигателя, называемой ползунком (или ротором в роторном двигателе).
Коммутация
Природа электродвигателей такова, что поля, создаваемые статором, должны непрерывно изменяться в зависимости от положения двигателя. Коммутация — это имя для этого. Современные бесщеточные двигатели коммутируются разумно, так что поля в двигателе действуют вместе, а не конфликтуют, и поэтому двигатель эффективно создает силу и движение.
То, как статоры устроены и коммутированы, будет в центре этой статьи. Но сначала немного теории о том, как обмотки статора создают силы.
Существуют некоторые положения двигателя, при которых определенная обмотка будет генерировать «оптимальное» количество силы на протекающий через нее ток. Существуют и другие «бесполезные» положения, когда одна и та же обмотка не будет создавать силы, независимо от силы тока, протекающего через нее. Затем есть все промежуточные положения, где сила тока этой обмотки будет постепенно колебаться от оптимального до бесполезного, до оптимального в другом направлении и обратно. Если количество силы на ток одной обмотки в двигателе нанести на график в зависимости от положения двигателя, результирующий график обычно будет выглядеть примерно так, как показано на рисунке 1.9.0003
Рисунок 1: Сила тока в одиночной обмотке при 360 градусах положения двигателя бесполезно и обратно к оптимальному, в чередующихся направлениях.
Положение двигателя и электрический угол
На рисунке 1 ось X измеряет «электрический угол», который показывает, как ротор/ползун двигателя выравнивается со статором. Важной концепцией здесь является то, что на полном ходу двигателя (т. е. 360 градусов вращения для роторного двигателя или длина хода линейного двигателя) часто будет более 360 электрических градусов, и график выше будет повторить. Например, для роторного двигателя с 6-полюсным ротором (3 пары магнитов) этот график будет повторяться последовательно 3 раза. Этот двигатель будет иметь в общей сложности 1080 электрических градусов на 360 механических градусов движения.
Важной концепцией здесь является то, что на полном ходу двигателя (т. е. 360 градусов вращения для роторного двигателя или длина хода линейного двигателя) часто будет более 360 электрических градусов, и график выше будет повторить. Например, для роторного двигателя с 6-полюсным ротором (3 пары магнитов) этот график будет повторяться последовательно 3 раза. Этот двигатель будет иметь в общей сложности 1080 электрических градусов на 360 механических градусов движения.
Линейные двигатели обычно имеют общий электрический градус, равный 360-кратной длине хода двигателя, деленной на «шаг полюсов», или удвоенному расстоянию между соседними магнитами в ползунке.
Для этого обсуждения мы можем просто сосредоточиться на 360 электрических градусах движения, учитывая, что коммутация будет повторяться несколько раз за оборот или на протяжении всей длины хода. И мы будем игнорировать нюансы, когда ползунок линейного двигателя втягивается в статор.
Проверка всех обмоток статора
Рис.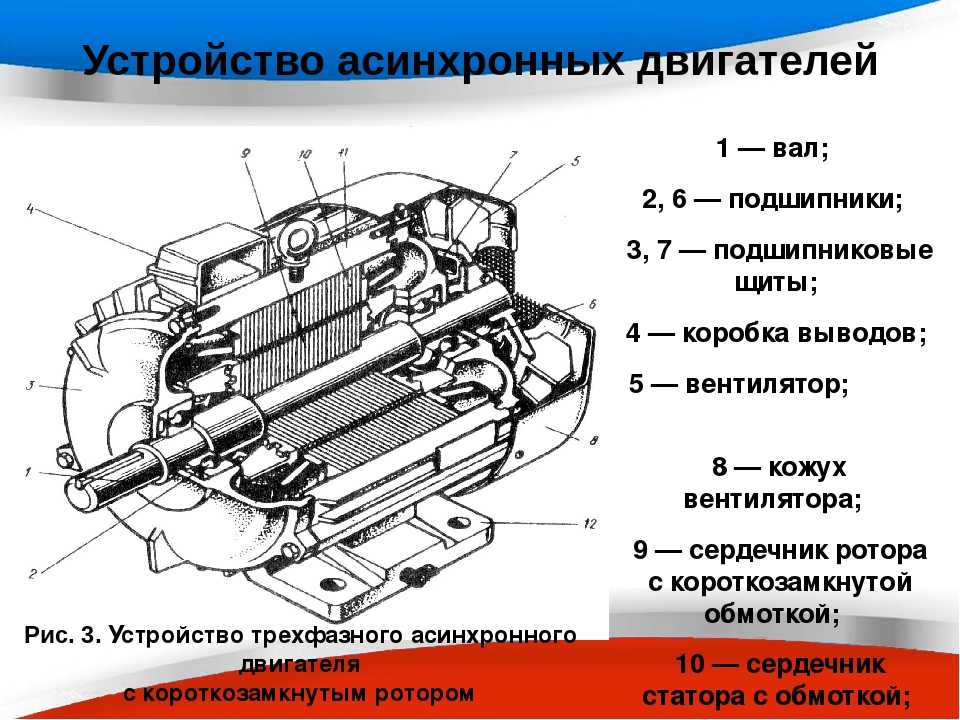 2. Сила тока всех обмоток статора в 6-полюсном статоре при различных положениях ползунка
2. Сила тока всех обмоток статора в 6-полюсном статоре при различных положениях ползунка
В то время как на графике рисунка 1 показана сила тока одной обмотки под разными электрическими углами , аналогичный график может исследовать силу тока всех обмоток двигателя одновременно под фиксированным электрическим углом. По мере движения двигателя (т. е. при изменении электрического угла) этот график будет смещаться влево и вправо.
На рис. 2 представлена зависимость силы от тока обмоток статора по всему линейному двигателю. Показаны 5 различных положений ползунка, чтобы проиллюстрировать, что при перемещении ползунка сила тока каждой из обмоток статора изменяется. Этот линейный двигатель имеет шаг полюсов ползуна 50,8 мм, а статор имеет 6 полюсов, что означает, что статор имеет длину 6 x 50,8 = 152 мм.
How Do We Make It Go
Общая идея коммутации двигателя состоит в том, чтобы подавать питание на обмотки, которые могут эффективно создавать силы (т. бесполезные обмотки (т. е. те, которые имеют нулевую силу на ампер). По мере движения двигателя обмотки, которые должны и не должны получать мощность, меняются вместе с ним. 9{N_w} I_n fw_n(\ тета)
бесполезные обмотки (т. е. те, которые имеют нулевую силу на ампер). По мере движения двигателя обмотки, которые должны и не должны получать мощность, меняются вместе с ним. 9{N_w} I_n fw_n(\ тета)
Уравнение 4
Важной концепцией этих уравнений является то, что сила в обмотке линейно пропорциональна току, а потери мощности экспоненциально пропорциональны току. Следствием этого является то, что важно использовать в двигателе каждую обмотку, которая может создавать силу, а не просто управлять наиболее эффективными. Это видно на следующем примере:
Пример 1: Оптимальное управление двухобмоточным двигателем.
Рассмотрим двигатель с двумя обмотками. Обе обмотки имеют сопротивление 1 Ом. При определенном электрическом угле одна обмотка двигателя имеет силу на ампер 2 Н/А, а вторая обмотка имеет силу на ампер -1 Н/А. Как можно достичь выходной мощности 4 Н?
Интуиция может заключаться в том, чтобы использовать только более эффективную обмотку: 2 ампера в первой обмотке, нулевой ток во второй. 2(\тета)
}
2(\тета)
}
Уравнение 5
Real Life Control
Почему идеал нереалистичен
Обычный метод подачи питания на обмотку заключается в подключении каждого из ее выводов к одному или двум МОП-транзисторам (электрическим переключателям), которые могут подключать и отключать выводы обмотки к власть. Именно по этой причине обмотки в двигателе не могут питаться по отдельности. Скорее, они сгруппированы в «фазы» последовательными, а иногда и параллельными соединениями, а затем подключены к драйверу двигателя как группа. Это означает, что все обмотки в пределах фазы получают одинаковую мощность.
Таким образом, мы должны отказаться от совершенства и рассмотреть компромиссы группировки обмоток вместе. Некоторые обмотки в фазе могут быть «бесполезными», в то время как другие в фазе могут вносить свой вклад; или некоторые обмотки внутри фазы могут создавать силы в противоположных направлениях, компенсируя друг друга.
Использование фаз
Статоры сгруппированы как минимум в две фазы, и количество используемых фаз определяет разрешающую способность управления обмотками.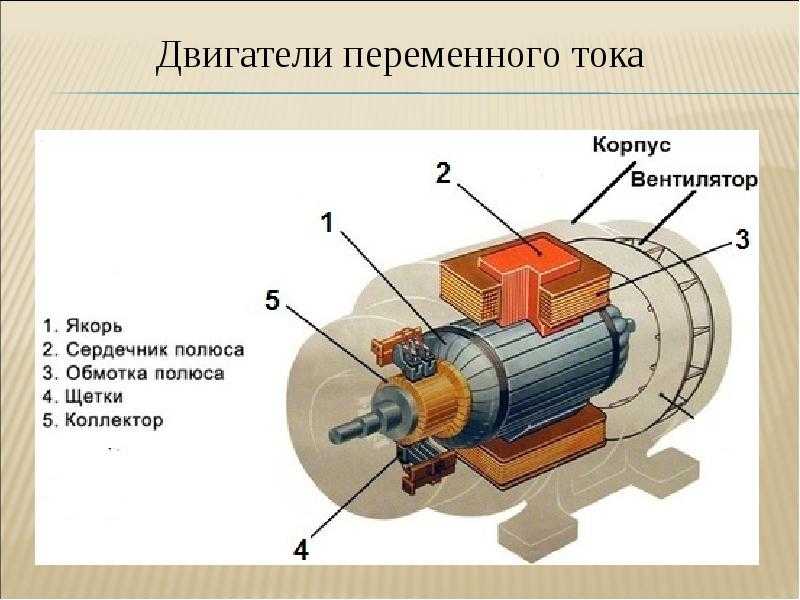 1.
1.
На рис. 2 показана сила тока всех обмоток двигателя (под разными электрическими углами). На рис. 3 показано разделение этих обмоток на 2–5 фаз. Группы фаз представлены цветными областями: зеленый — фаза 1, синий — фаза 2, желтый — фаза 3, фиолетовый — фаза 4, красный — фаза 5. Цветные области напоминают графическое представление интеграла, отражающее свойство суперпозиции: реакция фазы представляет собой сумму обмоток внутри нее.
Как и на Рисунке 2, по мере изменения электрического угла будет меняться и форма Рисунка 3. Распределения фаз (закрашенные области) не будут перемещаться, но их площадь ( и, следовательно, их общая сила тока) изменится .
Внимательный наблюдатель может обнаружить, что сумма заштрихованных областей равна нулю, так как области над и под осью x равны. И если бы соседние области были разведены без изменения полярности, это было бы правдой. Вместо этого каждая область связана с чередующейся полярностью.
Рис. 4. Области фазы 2 (синие) страдают от отмены противоположной полярности
Однако, когда некоторые обмотки в одной области (последовательно окрашенный блок) имеют чередующуюся полярность, эти обмотки фактически будут «бороться» друг с другом и сумма равна нулю, что указывает на пустую трату энергии. {th} фазы fp_n(\theta).
Чтобы найти оптимальный ток для фазы, мы можем использовать: 92 (\ тета)
}
{th} фазы fp_n(\theta).
Чтобы найти оптимальный ток для фазы, мы можем использовать: 92 (\ тета)
}
Уравнение 6
Как и для оптимального тока обмотки, вывод этого уравнения здесь выходит за рамки, но оно пропорционально подает ток на каждую обмотку на основе требуемой силы для двигателя и КПД фазы по сравнению с КПД все фазы. Используя этот метод оптимального питания двигателя с Np-фазами, мы можем исследовать преимущества построения двигателя с дополнительными фазами.
Повышение эффективности
Если мы начнем с того же количества обмоток, действующих на одни и те же постоянные магниты, какая разница между управлением им в 2, 3, 4 и 5 фазах?
Чтобы выяснить это, сначала определяется сила тока различных фаз для каждого электрического угла. Далее, для каждого электрического угла мы можем найти мощность, необходимую для воздействия на некоторую произвольную силу. Затем мы можем сравнить энергопотребление каждой фазы и узнать, что можно получить, а что нельзя.
Функции фазной силы тока
Чтобы найти функцию силы тока для каждой фазы, суммируются силы тока всех обмоток, составляющих эту фазу (следя за чередованием полярности для последовательных полюсов). Для примера статора, показанного на рисунке 2, обнаружены следующие функции.
Рисунок 5: Функции силы тока для 2-х, 3-х, 4-х и 5-фазных компоновок статора на рис. 2
Получение 100 Н от каждой компоновки приходят с потерями мощности. Величина потерь зависит от сопротивления обмоток и от того, насколько эффективно ток подается на обмотки. Как было показано, использование 5 фаз обеспечивает более точное управление подачей питания по сравнению с 2 фазами, и это должно привести к тому, что меньше обмоток будет бороться друг с другом, а больше энергии будет поступать на более эффективные обмотки.
Чтобы получить требуемую мощность для каждого электрического угла, применяется уравнение 6 для определения требуемых токов в каждой фазе. Затем общая мощность находится с помощью уравнения 1. Однако сначала необходимо знать сопротивление фазы.
Однако сначала необходимо знать сопротивление фазы.
Если предполагаемое общее сопротивление всех обмоток статора, соединенных последовательно, равно 36 Ом, мы можем использовать следующие сопротивления для каждой из фаз:
Эти цифры просто следуют из предположения, что каждая фаза состоит из последовательно соединенных обмоток.
Результирующая потребляемая мощность для создания 100 Н при каждом электрическом угле равна
0003
Как сравниваются константы двигателя?
Постоянная двигателя — это мера способности двигателя преобразовывать мощность в усилие. Это часто измеряется в силе на квадратный корень в ваттах.
В примере из этой статьи обнаруженные константы двигателя для каждой схемы фаз по электрическим углам равны
Если мы начнем с того же количества обмоток, действующих на одни и те же постоянные магниты, мы обнаружим, что управление статором в 2, 3, 4 или 5 фазах приводит к разным затратам энергии для той же выходной мощности. Конкретно:
Конкретно:
Рис. 9: Сравнение 2-, 3-, 4- и 5-фазной потребляемой мощности и констант двигателя
Это означает, что для одной и той же площади основания и материала добавление или удаление фаз из конструкции двигателя напрямую и значительно влияет на энергоэффективность этого двигателя. .
Зачем использовать 2 фазы, если она потребляет на 18% больше энергии, чем 4 фазы?
Учитывая, что большинство промышленных двигателей имеют 2-х или 3-х фазную обмотку, на данном этапе может возникнуть естественный вопрос. В основном это сводится к традициям и сложности.
Традиция
Обладая менее чем 200-летним опытом производства двигателей, наше общество далеко от оптимального решения. Инженеры всегда имеют дело с появлением новых инструментов и развитием современного искусства.
Первоначально коммутация производилась с помощью механических контактов (щеток), и о концепции управления обмотками статора с какой-либо оптимальной математикой не могло быть и речи. Меньшее количество фаз означает меньшее количество механических контактов и меньше отказов. Справедливо! Когда появились бесщеточные двигатели, они были по существу подключены непосредственно к сетям распределения электроэнергии, которые были все 2 или 3 фазы. Опять же, нельзя было точно контролировать фазные токи.
Меньшее количество фаз означает меньшее количество механических контактов и меньше отказов. Справедливо! Когда появились бесщеточные двигатели, они были по существу подключены непосредственно к сетям распределения электроэнергии, которые были все 2 или 3 фазы. Опять же, нельзя было точно контролировать фазные токи.
Когда методы электрического определения угла (например, датчики Холла и энкодеры) и технология драйверов двигателей продвинулись до такой степени, что стало возможным точное управление током, проектировщикам было предложено построить 2- и 3-фазные совместимые системы, которые могли бы обслуживать огромное количество 2 и существуют 3-фазные моторные корпуса.
В настоящее время подавляющее большинство доступных драйверов двигателей и управляющего программного обеспечения рассчитано только на 2-х и 3-х фазные двигатели.
Сложность
Интеллектуальное управление двигателем для достижения максимальной эффективности требует серьезной инженерной мысли: требуется быстрое и точное управление током, быстрое и точное определение электрического угла, некоторое знание силы тока рассматриваемого двигателя и логика, которая связывает все вместе с низкой задержкой. Таким образом, даже оптимальное управление 2 или 3 фазами — сложная задача.
Таким образом, даже оптимальное управление 2 или 3 фазами — сложная задача.
Когда фазы двигателя и привод двигателя расположены удаленно, как это обычно бывает, каждая фаза требует прокладки силовых проводов между двигателем и приводом. Эти выводы несут значительную мощность и значительные быстрые переходы напряжения, которые могут вызвать радиопомехи (ЭМП), которые могут повредить близлежащие линии датчиков. Добавление, например, еще 4-х таких линий путем перехода от 2-х фаз к 4-м не только затратно, но и потенциально может вызвать другие проблемы.
Зачем использовать 4 фазы, если это намного сложнее, чем 2 фазы?
Несмотря на трудности, появляется все больше причин, чтобы получить максимальную отдачу от электродвигателей. Рост цен на энергию может стимулировать заводы оптимизировать свои двигатели для снижения энергопотребления. Расширение запаса хода может побудить производителя электромобилей инвестировать в повышение эффективности. Быстро растущие цены на редкоземельные металлы, такие как неодим, делают получение большей производительности из меньшего количества материала еще более целесообразным.