Рулевое управление автомобиля | Автомобильный справочник
Рулевое управление автомобиля, это система управления направлением движения с помощью рулевого колеса. Рулевое управление представляет собой совокупность узлов и механизмов, предназначенных для синхронизации положения рулевого колеса и угла поворота управляемых колес. Вот о том, из каких узлов состоит современное рулевое управление автомобиля, мы и поговорим в этой статье.
Содержание
Классификация системы рулевого управления
Системы рулевого управления можно классифицировать следующим образом:
Мускульная система рулевого управления
Необходимые усилия рулевого управления генерируются исключительно мускульной энергией водителя. Эти системы рулевого управления в настоящее время используются в самых маленьких легковых автомобилях.
Система рулевого управления с усилителем
Усилия рулевого управления генерируются мускульной энергией водителя и вспомогательной силой, реализуемой гидравлически и в последнее время все чаще электрически.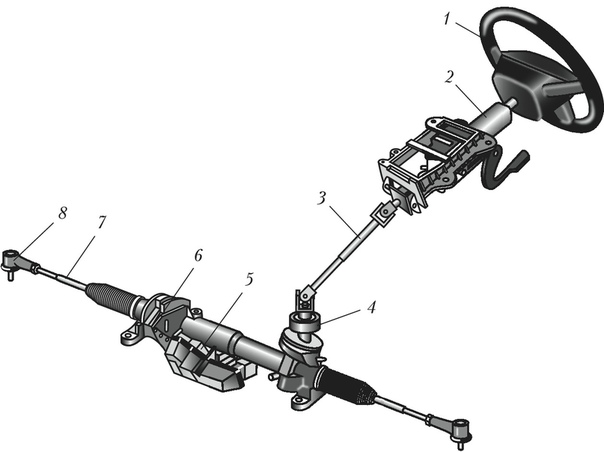
Система автоматизированного рулевого управления
Усилия рулевого управления генерируются исключительно не мускульной (внешней) энергией (например, в машинах).
Фрикционная система рулевого управления
Усилия рулевого управления создаются силами, воздействующими на контактное пятно шины. Примером такой системы могут служить поддерживающие мосты в грузовиках. Передача рулевых и вспомогательных сил происходит механически, гидравлически или электрически либо сочетаниями этих трех компонентов.
Требования к системе рулевого управления
Система рулевого управления преобразует создаваемые водителем вращательные движения рулевого колеса в изменение угла поворота управляемых колес автомобиля. Конструкция и схема системы призваны обеспечить удобное и безопасное рулевое управление автомобиля во всех ситуациях и на всех скоростях.
Передача инициируемых водителем рулящих движений на рулевом колесе без люфта особенно важна при движении по прямой. Это гарантирует безопасное, неутомительное для водителя управление автомобилем, прежде всего на средних и высоких скоростях.
Поэтому рулевой механизм должен быть очень жестким. Это необходимо для обеспечения точной управляемости и преодоления отклонения от заданного угла поворота рулевого колеса под действием изменяющихся возвратных сил, возникающих, например, при изменении бокового ускорения.
Слабое трение в рулевом механизме позволяет водителю получать через реактивные силы тактильную обратную связь, дающую информацию о коэффициенте сцепления между дорогой и шинами. Слабое трение также помогает колесам выровняться для движения по прямой. В системах рулевого управления с мускульной энергией слабое трение обеспечивает небольшие движущие силы.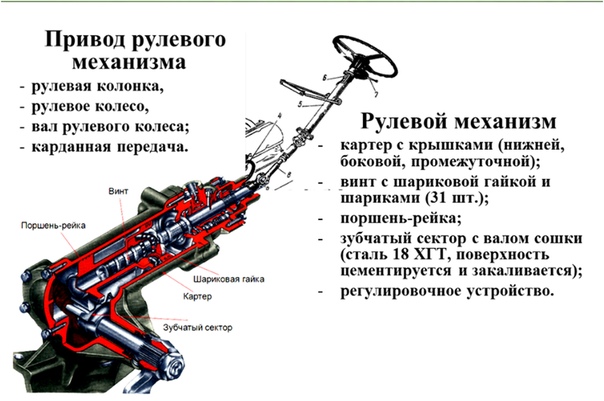
Кинематические параметры рулевого управления и конструкция управляемой оси автомобиля должны быть такими, чтобы водитель мог чувствовать величину сцепления между шинами и дорогой.
Требования к рулевому управлению
Требованиями к функционированию системы рулевого управления являются:
Легкое, безопасное рулевое управление автомобилем. Сюда, к примеру, относится тенденция рулевого управления автоматически возвращаться в положение прямолинейного движения при отпускании руля.
Максимально возможное демпфирование колебаний, передаваемых от колес автомобиля на рулевое колесо при движении по неровным дорогам. Но этот процесс не должен приводить к потере обратной связи в рулевом управлении.
Для обеспечения чистого качения колес и, соответственно, предотвращения их избыточного износа вся рулевая кинематика должна удовлетворять условию Аккермана.
Достаточно жесткая схема всех компонентов рулевого механизма означает, что даже малые инициируемые водителем рулевые движения преобразуются в изменение направления управляемых колес, обеспечивая безопасную и точную управляемость автомобиля.
Угол поворота рулевого колеса от упора до упора по соображениям комфорта должен быть как можно меньше при парковке и движении с небольшой скоростью. Однако на средних и высоких скоростях рулевое управление не должно быть столь чувствительным.
Требования законодательства, предъявляемые к системам рулевого управления автомобилей
Требования законодательства, предъявляемые к системам рулевого управления автомобилей, описаны в международных правилах ECE-R79. К этим требованиям, наряду с базовыми функциональными требованиями, относятся максимально допустимые управляющие силы для исправной и неисправной систем рулевого управления.
Для автомобилей категории М1 (легковые автомобили с числом посадочных мест до 8): когда автомобиль в тангенциальном направлении выезжает из круга с радиусом 50 м на скорости 50 км/ч, в системе рулевого управления не должно возникать никаких необычных вибраций. В автомобилях категорий М2, М3, N1, N2 и N3 это поведение должно демонстрироваться на скорости 40 км/ч или, если это значение не достигается, то на максимальной скорости.
Это поведение также предписывается в случае неисправности у автомобилей с гидро- или электроусилителем рулевого управления. У автомобилей категории М1 это должно быть возможно в случае отказа сервопривода рулевого управления для въезда со скоростью 10 км/ч в течение 4 секунд в круг радиусом 20 м. Управляющее усилие на рулевом колесе не должно превышать 30 даН (табл. «Нормы рабочих усилий в системе рулевого управления» ).
Управляющее усилие на рулевом колесе не должно превышать 30 даН (табл. «Нормы рабочих усилий в системе рулевого управления» ).
Типы рулевых механизмов автомобиля
Требования к системе рулевого управления дали развитие прежде всего двум фундаментальным типам рулевых механизмов. Оба типа можно использовать в системах с чисто мускульной энергией или (в сочетании с соответствующими сервосистемами) в системах с усилителем рулевого управления.
Реечный рулевой механизм
В принципе, как следует из названия, реечный рулевой механизм состоит из шестерни и зубчатой рейки (рис. «Реечный рулевой механизм» ). Передаточное отношение механизма определяется отношением числа оборотов шестерни, равного числу оборотов рулевого колеса, к перемещению рейки.
В качестве альтернативы постоянному передаточному числу рейки на рейке за счет соответствующей нарезке зубьев имеется возможность изменять это число в зависимости от длины хода. Таким образом, устойчивость при движении автомобиля по прямой можно улучшить посредством непрямого передаточного числа вокруг центра рулевого управления. В то же время, это возможно с реализацией прямого передаточного числа в диапазоне средних и больших углов поворота (например, при парковке) для уменьшения необходимого угла поворота при повороте рулевого колеса от упора до упора.
Таким образом, устойчивость при движении автомобиля по прямой можно улучшить посредством непрямого передаточного числа вокруг центра рулевого управления. В то же время, это возможно с реализацией прямого передаточного числа в диапазоне средних и больших углов поворота (например, при парковке) для уменьшения необходимого угла поворота при повороте рулевого колеса от упора до упора.
Рулевой механизм типа «винт-шариковая гайка-сектор»
Усилия, возникающие между винтом и гайкой рулевой передачи, передаются через ряд рециркулирующих шариков, снижающих трение (рис. «Рулевой механизм с шариковой гайкой» ). Гайка воздействует на вал сошки через зубчатый сектор. Этот рулевой механизм также позволяет получать переменное передаточное отношение.
Повышение эффективности рулевого управления с зубчатой рейкой означает, что рулевой механизм с шариковой гайкой практически больше не используется в легковых автомобилях.
Рулевое управление с усилителем для легковых автомобилей
Увеличение размеров и массы автомобилей и повышение требований к комфорту и безопасности в последние годы привело к тому, что рулевое управление с усилителем появилось на всех категориях легковых автомобилей, вплоть до компактных. Эти системы, за редким исключением, устанавливаются в базовой комплектации. Усилия водителя по рулению поддерживаются гидравлической или электрической сервосистемой. Эта сервосистема должна быть такой, чтобы водитель постоянно получал четкую обратную связь о сцеплении шин с дорогой, и чтобы эффективно гасились негативные воздействия, вызываемые неровностями дороги.
Эти системы, за редким исключением, устанавливаются в базовой комплектации. Усилия водителя по рулению поддерживаются гидравлической или электрической сервосистемой. Эта сервосистема должна быть такой, чтобы водитель постоянно получал четкую обратную связь о сцеплении шин с дорогой, и чтобы эффективно гасились негативные воздействия, вызываемые неровностями дороги.
Системы рулевого управления с гидравлическим усилителем
Сочетание механической конструкции рулевого механизма с гидравлической сервосистемой привело к созданию реечного рулевого механизма с усилителем (рис. «Схема системы рулевого управления с усилителем» ) и рулевой механизм с шариковой гайкой с усилителем.
Распределительный клапан рулевой системы
Служит для нагнетания в силовой цилиндр гидравлической жидкости под таким давлением, которое соответствует углу поворота рулевого колеса (рис.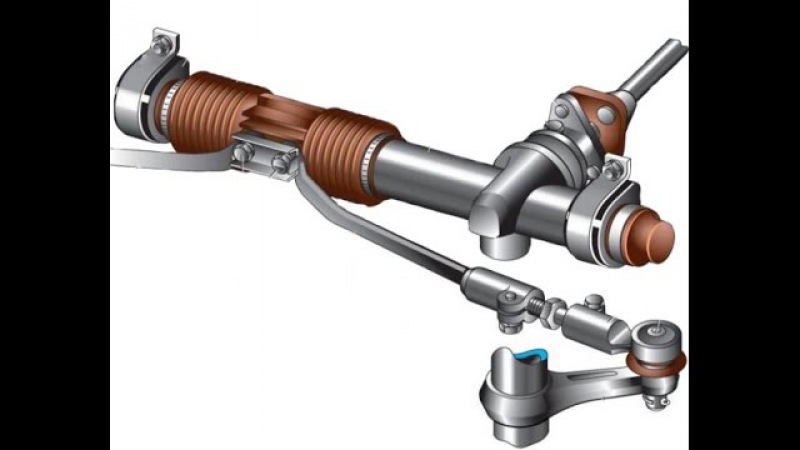 «Принцип действия управляющего клапана рулевого управления с гидроусилителем» ). Упругий датчик крутящего момента, обычно торсион (« Схема системы рулевого управления с усилителем» ) обеспечивает преобразование момента на рулевом колесе при отсутствии люфта в пропорциональное этому моменту прецизионное управляющее перемещение золотника. Перемещение золотника вызывается поворотным скольжением относительно управляющей втулки. Каналы золотника, которые выполнены в форме паза, в результате управляющего перемещения образуют отверстия соответствующего поперечного сечения для пропуска жидкости.
«Принцип действия управляющего клапана рулевого управления с гидроусилителем» ). Упругий датчик крутящего момента, обычно торсион (« Схема системы рулевого управления с усилителем» ) обеспечивает преобразование момента на рулевом колесе при отсутствии люфта в пропорциональное этому моменту прецизионное управляющее перемещение золотника. Перемещение золотника вызывается поворотным скольжением относительно управляющей втулки. Каналы золотника, которые выполнены в форме паза, в результате управляющего перемещения образуют отверстия соответствующего поперечного сечения для пропуска жидкости.
Распределительные клапаны обычно работают в соответствии с так называемым принципом «открытого центра», т.е. когда распределительный клапан не действует, жидкость, подаваемая насосом, перепускается обратно в бачок при нулевом давлении.
Характеристики рулевого управления с усилителем
Растущие требования к удобству и безопасности привели к появлению управляемых систем рулевого управления с усилителем.
Определенные характеристики усилителя рулевого управления позволяют поворачивать рулевое колесо с минимальным усилием при стоящем автомобиле или вовремя его движения с небольшой скоростью. Степень усиления снижается с повышением скорости движения. Таким образом, при движении с высокими скоростями обеспечивается возможность управления поворотами автомобиля в оптимальном режиме.
Степень усиления снижается с повышением скорости движения. Таким образом, при движении с высокими скоростями обеспечивается возможность управления поворотами автомобиля в оптимальном режиме.
При такой системе важно, что давление и расход гидравлической жидкости никогда не снижаются и поэтому эти параметры могут быть немедленно востребованы в критических ситуациях управления.
Рабочий цилиндр рулевой системы
Силовой цилиндр двойного действия преобразует давление гидравлической жидкости во вспомогательное усилие, воздействующее на рейку и усиливающее воздействие водителя на рулевое колесо. Этот цилиндр обычно размещается внутри картера рулевого механизма и характеризуется низким трением. Поскольку цилиндр должен иметь крайне низкое трение, то особо высокие требования предъявляются к поршню и уплотнениям штока.
Подача жидкости гидроусилителя руля
Подача жидкости осуществляется насосом (обычно приводимым от двигателя автомобиля), который соединен с бачком посредством шлангов и трубок. Насос должен быть рассчитан на нагнетание необходимого давления и объема гидравлической жидкости для выполнения парковки даже на холостых оборотах двигателя.
Насос должен быть рассчитан на нагнетание необходимого давления и объема гидравлической жидкости для выполнения парковки даже на холостых оборотах двигателя.
Для защиты от перегрузок в системе рулевого управления требуется клапан ограничения давления. Этот клапан обычно встраивается в насос. Конструкция насоса должна обеспечивать такой режим работы, чтобы рабочая температура гидравлической жидкости не поднималась выше предельного уровня, отсутствовал шум при работе насоса и не образовывалась пена в используемой жидкости.
Насос для усиления рулевого управления может также иметь привод от электродвигателя. Здесь обычно используется шестеренчатый или роторный насос. Из-за ограниченной мощности электрической системы автомобиля эти системы используются в основном в автомобилях классов А и В. Поскольку необходимость в ременном приводе от ДВС отпадает, то насос можно устанавливать произвольно, что благоприятствует модульной конструкции автомобиля. Управляющая электроника и анализ сигналов, например, скорости автомобиля и скорости руления, позволяют адаптировать частоту вращения вала насоса к текущему энергопотреблению рулевого управления и ситуации на дороге в целях экономии энергии.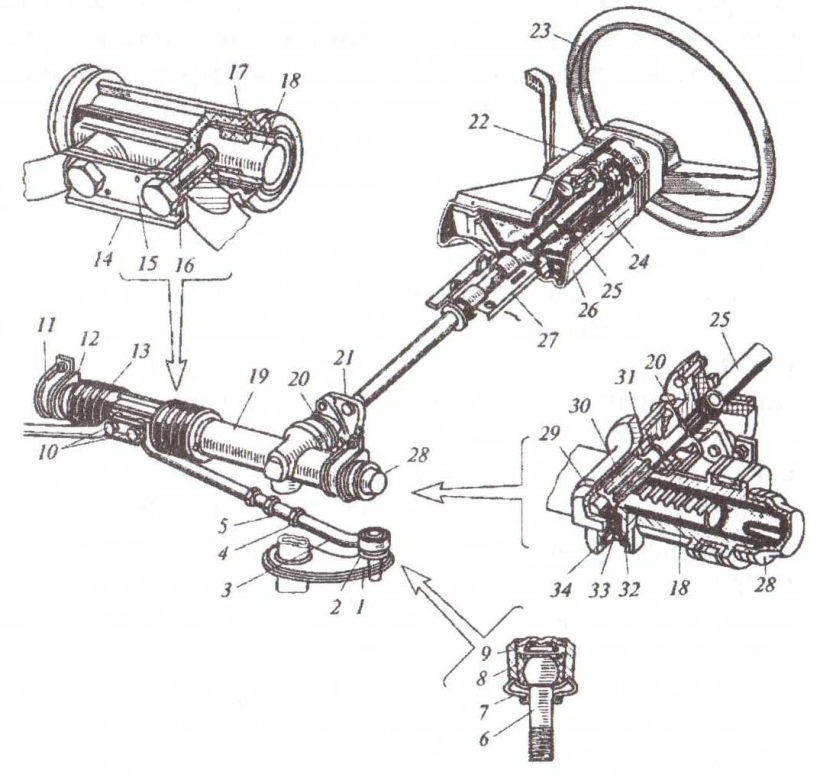
Системы рулевого управления с электроусилителем
Системы рулевого управления с электромеханическим усилителем также используются в легковых автомобилях среднего и малого классов. Такие системы имеют электродвигатель, работающий от бортовой сети. Механическое соединение электродвигателя и рулевого механизма может быть реализовано в виде рулевой колонки и привода. Система состоит из следующих компонентов (рис. «Схема рулевого управления с электроусилителем» ):
- Рулевая колонка, соединяющая шестеренку рулевого механизма с рулевым колесом автомобиля;
- Шестерня, преобразующая вращательное рулевое движение в линейное перемещение зубчатой рейки;
- Зубчатая рейка, соединенная с колесами через тяги и рычаги;
- Датчики, регистрирующие информацию для вычисления необходимого дополнительного крутящего момента на шестерне;
- Серво-блок, состоящий из ЭБУ и серводвигателя (электродвигателя), генерирующего дополнительный крутящий момент на шестерне.

Когда водитель поворачивает рулевое колесо, датчик регистрирует прилагаемый крутящий момент и отправляет эту информацию в виде электрического сигнала (аналогового или цифрового) на ЭБУ. ЭБУ вычисляет дополнительный крутящий момент и на основании вычисленного значения активирует серводвигатель. В настоящее время в качестве серводвигателей используются коллекторные или бесщеточные электродвигатели постоянного тока или трехфазные асинхронные двигатели. В зависимости от необходимых характеристик рулевого управления создаваемый этими электродвигателями крутящий момент составляет 3-6 Н-м.
Направление вращения двигателя зависит от направления вращения рулевого колеса. Возвратное движение рулевого колеса также может быть усилено. Это происходит, когда водитель выходит из поворота. В этой ситуации серводвигатель создает крутящий момент, поддерживающий обратное вращение рулевого колеса в положение движения по прямой.
Серводвигатель передает этот поддерживающий крутящий момент через червячную передачу или механизм типа «винт- шариковая гайка-сектор». В зависимости от варианта рулевого управления он передается на рулевую колонку, шестерню и зубчатую рейку реечного механизма.
В зависимости от варианта рулевого управления он передается на рулевую колонку, шестерню и зубчатую рейку реечного механизма.
Управляющая электроника учитывает различные сигналы и параметры, например, скорость движения, угол поворота рулевого колеса, крутящий момент на рулевой колонке и скорость руления. С помощью других расположенных в автомобиле датчиков и благодаря объединению в сеть ЭБУ рулевого управления с другими ЭБУ, эту систему рулевого управления можно использовать для реализации вспомогательных функций, повышающих комфорт и безопасность движения.
Ориентированное на потребности управление электродвигателем позволяет достичь значительной экономии топлива, в среднем на 0,3 л /100 км по сравнению с гидроусилителем, насос которого приводится в действие от ДВС. В городском цикле экономия топлива возрастает до 0,7 л /100 км.
В случае сбоя энергоснабжения или усиления рулевого управления водитель может продолжить руление чисто механически, но с большими мускульными затратами.
Рулевое управление с наложением угла поворота рулевого колеса
В системе рулевого управления с наложением угол поворота рулевого колеса может увеличиваться или уменьшаться на определенную величину. Эта система обычно комбинирует с управляемой системой рулевого управления с электро- или гидроусилителем. Рулевое управление с наложением угла поворота рулевого колеса не обеспечивает автономной езды, но оптимально адаптирует характеристики рулевого управления к ситуации движения, обеспечивая максимальный комфорт и курсовую устойчивость. При объединении в сеть системы управления с динамическими параметрами такое рулевое управление может еще больше повысить безопасность в критических ситуациях дорожного движения посредством не зависящих от водителя регулировок рулевого управления. Такие системы рулевого управления уже производятся серийно под торговыми марками Active Steering (BMW) и Dynamic Steering (Audi).
Угловое наложение, не зависящее от задаваемого водителем угла поворота рулевого колеса, в настоящее время реализуется двумя техническими решениями.
Планетарный механизм рулевой системы
Двойной планетарный механизм с различными передаточными числами встроен в общее водило планетарной передачи в рулевом механизме (рис. «Планетарный механизм, рулевое управление с наложением» ). Это означает постоянное наличие механической связи между рулевым колесом и управляемыми колесами.
Разные передаточные числа означают, что при повороте водила планетарной передачи задается дополнительный угол поворота. Угол задается электродвигателем, вращающим червячное колесо-водило планетарной передачи.
Волновая зубчатая передача с гибким звеном
Блок наложения угла поворота (рис. «Схема рулевого управления с наложением угла поворота с волновой передачей» ) в этом случае состоит из волновой зубчатой передачи с гибким звеном и электродвигателя с полым валом (рис. «Актуатор рулевого управления с наложением угла поворота с волновой передачей» ).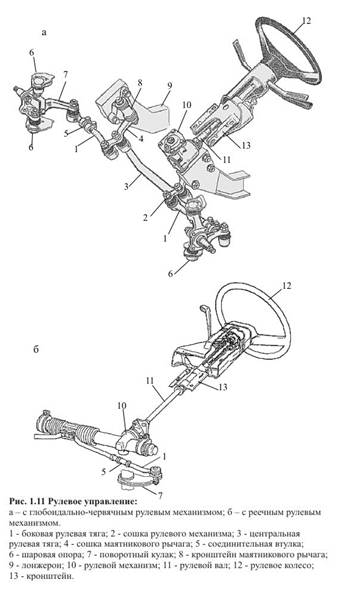 Очень компактная конструкция позволяет встроить этот блок в рулевую колонку без ущерба таким параметрам, как монтажное пространство и поведение при столкновении. Вал на конце с рулевым колесом положительно соединен с гибким шлицем. Поворотное движение рулевого колеса через зубчатое зацепление передается на внутреннюю шестерню (круговой шлиц) для выходного вала. Эллиптический внутренний ротор (валогенератор), размещенный в гибком шлице, приводимый электродвигателем, генерирует наложенный угол поворота через разное количество зубьев между гибким и круговым шлицами. Здесь также имеется постоянная механическая связь между рулевым колесом и управляемыми колесами через зубчатое зацепление волновой передачи.
Очень компактная конструкция позволяет встроить этот блок в рулевую колонку без ущерба таким параметрам, как монтажное пространство и поведение при столкновении. Вал на конце с рулевым колесом положительно соединен с гибким шлицем. Поворотное движение рулевого колеса через зубчатое зацепление передается на внутреннюю шестерню (круговой шлиц) для выходного вала. Эллиптический внутренний ротор (валогенератор), размещенный в гибком шлице, приводимый электродвигателем, генерирует наложенный угол поворота через разное количество зубьев между гибким и круговым шлицами. Здесь также имеется постоянная механическая связь между рулевым колесом и управляемыми колесами через зубчатое зацепление волновой передачи.
В пассивном состоянии электродвигатель блокируется электромеханической блокировкой, обеспечивая прямой механический сквозной привод для рулящего движения.
Концепция активации рулевого управления автомобиля
ЭБУ рулевого управления с наложением угла поворота проверяет правдоподобность необходимой информации датчика и анализирует. Он вычисляет заданный угол для электродвигателя и через встроенный задающий каскад генерирует сигналы широтно-импульсной модуляции для активации электродвигателя, который представляет собой бесщеточный электродвигатель постоянного тока со встроенным датчиком положения ротора. Максимальный ток электродвигателя составляет 40 А при напряжении бортовой сети 12 В. Датчик положения ротора позволяет блоку управления регулировать электронную коммутацию и, соответственно, направление вращения ротора. Он также вычисляет и проверяет суммарный заданный дополнительный угол поворота с помощью алгоритма суммирования в программном обеспечении блока управления.
Он вычисляет заданный угол для электродвигателя и через встроенный задающий каскад генерирует сигналы широтно-импульсной модуляции для активации электродвигателя, который представляет собой бесщеточный электродвигатель постоянного тока со встроенным датчиком положения ротора. Максимальный ток электродвигателя составляет 40 А при напряжении бортовой сети 12 В. Датчик положения ротора позволяет блоку управления регулировать электронную коммутацию и, соответственно, направление вращения ротора. Он также вычисляет и проверяет суммарный заданный дополнительный угол поворота с помощью алгоритма суммирования в программном обеспечении блока управления.
Эффективный угол поворота, сумма угла поворота рулевого колеса и наложенного угла поворота электродвигателя вычисляются блоком управления и передаются по автомобильной шине связи на соответствующие ЭБУ.
Заданное значение эффективного угла поворота
Заданное значение эффективного угла поворота, формируемое в ЭБУ рулевого управления с наложением угла поворота состоит из частичного заданного значения для комфортабельности рулевого управления и частичного заданного значения для стабилизации автомобиля. Сигналы, необходимые для вычисления этих переменных, считываются блоком управления по шине CAN.
Сигналы, необходимые для вычисления этих переменных, считываются блоком управления по шине CAN.
Частичное заданное значение для комфортабельности рулевого управления представляет собой зависимое от скорости движения переменное передаточное отношение рулевого управления. Это значение вычисляется из скорости движения автомобиля и угла поворота рулевого колеса. Когда автомобиль неподвижен или движется с небольшой скоростью, к задаваемому водителем углу поворота добавляется определенный угол. Это делает передаточное отношение более чувствительным. Водитель может полностью повернуть колеса менее чем за один полный оборот рулевого колеса. Этот добавочный угол поворота непрерывно уменьшается с ростом скорости движения. Начиная со скорости порядка 80-90 км/ч из задаваемого водителем угла поворота вычитается определенный угол, и рулевое управление становится менее чувствительным. Это обеспечивает устойчивость автомобиля при движении по прямой на высокой скорости и в то же время предотвращает потерю управления над автомобилем из-за слишком резкого руления.
Для вычисления частичного заданного значения для стабилизации автомобиля — в дополнение к углу поворота и скорости движения — перемещение автомобиля измеряется с помощью датчиков угловой скорости поворота вокруг вертикальной оси и бокового ускорения. В системе рулевого управления с наложением используются датчики системы курсовой устойчивости. Как же, как и ESP, запускаемая в ЭБУ вычислительная модель рассчитывает эталонное движение автомобиля. В случае отклонения фактического движения автомобиля от эталонного активируется рулевое управление для стабилизации автомобиля. Обе системы непрерывно обмениваются информацией, чтобы эффект взаимодействия контроллеров ESP и системы рулевого управления с наложением угла поворота был оптимальным.
Концепция безопасности рулевого управления
Все используемые внутренние и внешние сигналы непрерывно контролируются блоком управления, проверяется их правдоподобность. Если сигнал датчика больше не кажется правдоподобным, то дополнительная функция рулевого управления, на базе которой работает датчик, деактивируется. Например, при отказе датчика поворота автомобиля вокруг вертикальной оси отключается измерение угла поворота автомобиля вокруг вертикальной оси системы рулевого управления с наложением угла поворота. Переменное передаточное отношение остается активным.
Например, при отказе датчика поворота автомобиля вокруг вертикальной оси отключается измерение угла поворота автомобиля вокруг вертикальной оси системы рулевого управления с наложением угла поворота. Переменное передаточное отношение остается активным.
Если безопасная активация электродвигателя больше невозможна из-за сбоя, то система полностью выключается, и обеспечивается непосредственный сквозной привод рулевого механизма от рулевого колеса путем самоторможения шестеренчатой ступени и электромеханической блокировки. Этот переход на аварийный режим также активируется при остановке ДВС или отключении электропитания, что позволяет, к примеру, отбуксировать автомобиль.
Рулевое управление с усилителем для грузовых автомобилей
Рулевое управление полностью гидравлического типа
Гидростатические системы рулевого управления представляют собой системы рулевого управления с гидроусилителем. Рулящее усилие водителя гидравлически усиливается и исключительно гидравлически передается на управляемые колеса. Поскольку механическая связь отсутствует, то максимально допустимая скорость ограничивается региональным законодательством. В Германии она составляет 25 км/ч. В зависимости от конфигурации системы и свойств аварийного рулевого управления возможно увеличение скорости до 62 км/ч. Поэтому использование этих систем ограничивается спецтехникой.
Рулевое управление с одноконтурным гидроусилителем для грузовых автомобилей
Грузовые автомобили обычно оснащаются рулевым управлением с шариковой гайкой (рис. «Рулевой механизм с шариковой гайкой с усилителем» ). Управляющий клапан встроен в рулевой механизм и вместе с червячной передачей образует единый блок. Вращающее движение рулевого колеса передается по бесконечной цепи рециркулирующих шариков на шариковую гайку. Короткие зубья на шариковой гайке входят в зацепление с зубьями сектора. Создаваемое вращательное движение сектора через рулевой рычаг передается на рулевой привод управляемых колес.
Сервоусилие прилагается так же, как и в реечном рулевом механизме с усилителем — поворотным золотниковым клапаном. Рабочий цилиндр образуется уплотняющей поверхностью между корпусом шариковой гайки и рулевым блоком. Поскольку снаружи корпуса не требуется дополнительных трубопроводов, создается прочный и компактный рулевой блок с высокой выходной мощностью.
Двухконтурная система рулевого управления, предназначенная для большегрузных грузовых автомобилей
Двухконтурные системы рулевого управления (рис. «Двухконтурная система рулевого управления с усилителем» ) требуются тогда, когда необходимые движущие силы на рулевом колесе превышают регламентируемые Правилами ECE-R79 при отказе усилителя рулевого управления. Эти системы рулевого управления отличаются гидравлической избыточностью. Оба контура рулевого управления в этих системах функционально испытываются с помощью индикаторов расхода, и водителю сигнализируется состояние сбоя. Насосы для запитывания независимых контуров рулевого управления должны иметь разные приводы (например, от двигателя, от устройства, работа которого зависит от скорости движения автомобиля или электропривода). При отказе одного контура, к примеру, из-за сбоя в системе рулевого управления или остановки ДВС, автомобилем можно управлять с помощью рабочего резервного контура в соответствии с требованиями законодательства.
Насосы для запитывания независимых контуров рулевого управления должны иметь разные приводы (например, от двигателя, от устройства, работа которого зависит от скорости движения автомобиля или электропривода). При отказе одного контура, к примеру, из-за сбоя в системе рулевого управления или остановки ДВС, автомобилем можно управлять с помощью рабочего резервного контура в соответствии с требованиями законодательства.
Двухконтурные системы обычно принимают форму рулевого управления с шариковой гайкой с усилителем со встроенным вторым клапаном рулевого управления. Этот второй клапан управляет дополнительно установленным рабочим цилиндром и обеспечивает дублирование существующей сервосистемы в рулевом управлении с шариковой гайкой.
РЕКОМЕНДУЮ ЕЩЁ ПОЧИТАТЬ:
Усилители руля | Усилители рулевого управление: описание и типы
Водители со стажем на всю жизнь запомнили специфику управления машиной без усилителя рулевого управления: на стоящем автомобиле колеса провернуть очень сложно, крутить рулем необходимо в движении. К счастью, необходимость в овладении подобными навыками осталась в прошлом, практически все современные машины оснащены усилителями руля.
К счастью, необходимость в овладении подобными навыками осталась в прошлом, практически все современные машины оснащены усилителями руля.
Преимущества очевидны:
- легко вращать руль;
- при маневрировании необходимо меньшее количество поворотов руля;
- легче удержать машину на нужной траектории при повреждении колеса или иных экстремальных ситуациях;
- при наезде на препятствие усилитель действует как демпфер, сглаживая удар при передаче на руки водителя.
В автосалонах ГК FAVORIT MOTORS представлены автомобили с разными типами усилителей рулей.
Классификация усилителей рулевого управления
Гидравлический усилитель руля (ГУР)
Это один из наиболее распространенных типов, применяемый с 50-х годов прошлого века. Состоит из насоса, гидроцилиндра, бачка с запасом гидравлической жидкости (также называют маслом ГУР) и распределителя, соединенных между собой трубками. Насос, соединенный приводом с двигателем, создает необходимое давление в системе. Гидроцилиндр преобразует давление жидкости в перемещение поршня и штока, тем самым облегчает вращение колес.
Насос, соединенный приводом с двигателем, создает необходимое давление в системе. Гидроцилиндр преобразует давление жидкости в перемещение поршня и штока, тем самым облегчает вращение колес.
Гидравлический усилитель нравится опытным водителям по той причине, что обеспечивает информативное и точное управление. При выходе из строя, руль будет сложно вращать, но все же доехать до сервиса можно.
Минусы такой системы:
- на насос уходит часть энергии двигателя, что приводит к увеличению расхода топлива;
- есть вероятность протечек системы.
При нарушении герметичности системы жидкость постепенно уходит. Если это вовремя не заметить, то из строя может выйти дорогостоящий узел. Когда вы заметите снижения уровня жидкости в бачке ГУР, необходимо немедленно связаться с технической службой ГК FAVORIT MOTIRS. Квалифицированные мастера в короткие сроки устранят неисправность.
Электрический усилитель руля (ЭУР)
Миром правит электричество, и сейчас большое распространение получили электрические усилители руля, состоящие из электродвигателя, механической передачи и системы управления (датчиков). Датчик фиксирует действия водителя и активирует мотор, интегрированный в рейку рулевого колеса. В результате от водителя требуется минимальное усилие.
Датчик фиксирует действия водителя и активирует мотор, интегрированный в рейку рулевого колеса. В результате от водителя требуется минимальное усилие.
Такая система компактна, не так уж дорога, требует минимальных настроек. Вероятность выхода из строя, по сравнению с гидравлической, мала. Чаще всего причина неисправности состоит в окислении контактов или неисправности датчика. Бывают случаи, когда причиной дефекта становятся сбои в работе блоков управления или скачки напряжения бортовой сети. В этом случае на панели приборов загорится сигнал неисправности, и нужно оперативно связаться с технической службой ГК FAVORIT MOTORS.
Электрогидравлический усилитель руля (ЭГУР)
Замкнутая система состоит из тех же элементов, что и классический гидравлический усилитель руля: насос, гидроцилиндр, распределитель, бачок с запасом жидкости ГУР. Основное отличие в том, что насос вращает дополнительный электродвигатель, получающий питание от генератора. Такая система работает не постоянно, а только в момент вращения колеса, что снижает расход топлива. Вероятность утечки жидкости ГУР и выхода из строя электрических блоков, разумеется, есть, но и преимущества налицо: энергоэффективность, сочетающаяся с информативностью и точностью управления.
Вероятность утечки жидкости ГУР и выхода из строя электрических блоков, разумеется, есть, но и преимущества налицо: энергоэффективность, сочетающаяся с информативностью и точностью управления.
Деление по принципу действия
Усилители могут быть адаптивными (также используется термин активный) и неадаптивными. Первые имеют переменный коэффициент усиления, который зависит от скорости машины: на малом ходу руль крутится легко, при наборе скорости рулевое колесо наливается тяжестью. Это сделано в целях безопасности, поскольку сильный и резкий поворот руля на скорости может привести к аварии. В конструкцию адаптивного усилителя руля входит дополнительный датчик скорости.
Как сберечь и продлить жизнь усилителю руля
Часто водители сами выводят из строя системы. Классический случай: попытка забраться на высокий бордюр с сильно вывернутыми колесами. Создается повышенное давление в гидравлической системе, что приводит к утечке. От повышенной нагрузки может выйти из строя электромотор. Эксперты ГК FAVORIT MOTORS не рекомендуют удерживать руль в крайнем положении более 4 секунд – опять же по причине возникновения избыточного давления.
Эксперты ГК FAVORIT MOTORS не рекомендуют удерживать руль в крайнем положении более 4 секунд – опять же по причине возникновения избыточного давления.
В морозы перед стартом нужно слегка разогреть жидкость ГУР. Для этого достаточно пары-тройки вращений рулем. И, разумеется, нужно периодически проверять натяжение ремня привода насоса гидроусилителя, контролировать уровень рабочей жидкости в бачке, своевременно производить замену жидкости ГУР вместе с фильтром.
Как видите, большинство рекомендаций относится к гидравлическим или электрогидравлическим системам. Электрические усилители требуют меньшего ухода.
Назначение и типы рулевых устройств автомобилей
содержание .. 40 41 42 43 44 45 46 47 48 49 50 ..
34. Рулевое управление,
назначение и устройство привода его механизмов
Рулевое управление,
назначение и устройство привода его механизмов
34.1. Назначение и типы рулевых устройств автомобилей
Рулевым управлением называется совокупность устройств, осуществляющих поворот управляемых колес автомобиля. Рулевое управление служит для изменения и поддержания направления движения автомобиля. Оно в значительной степени обеспечивает безопасность движения автомобиля. Типы рулевых управлений, классифицированные по различным признакам проиллюстрированы на рис. 9.1.
Рис. 9.1. Типы рулевых управлений, классифицированные по различным
признакам
На автомобилях изменение
направления движения осуществляется поворотом передних колес различными типами
рулевых управлений (рис. 9.2).
9.2).
Рис. 9.2. Рулевые управления при независимой (а) и зависимой (б) подвесках
управляемых колес:ь1 – рулевое колесо; 2 – вал; 3 – рулевая передача;
4, 12 – цапфы; 5, 9, 11, 14 – рычаги; 7 – сошка; 6, 8, 10, 13, 15 – тяги
Левое рулевое управление применяется в автомобилях большинства стран, где принято правостороннее движение транспорта (Россия, США и др.), а правое рулевое управление — в странах с левосторонним движением транспорта (Япония, Великобритания). При этом рулевое колесо, установленное с левой или правой стороны автомобиля, обеспечивает лучшую видимость при разъезде с транспортом, движущимся навстречу.
Рулевые управления без
усилителя обычно устанавливаются на легковых автомобилях особо малого и малого
классов и грузовых малой грузоподъемности. Рулевые управления с усилителем
применяются на всех остальных автомобилях. При этом значительно облегчается их
управление, улучшается маневренностьи повышается безопасность движения, — при
разрыве шины автомобиль можно удержать на заданной траектории движения.
Конструкция рулевого управления во многом зависит от типа подвески передних
колес автомобиля. При независимой подвеске передних управляемых колес, которая
применяется на всех легковых автомобилях, в рулевое управление без усилителя
входят, см. рис. 9.1, а; при зависимой подвеске передних колес см.рис. 9.1, б.
При этом значительно облегчается их
управление, улучшается маневренностьи повышается безопасность движения, — при
разрыве шины автомобиль можно удержать на заданной траектории движения.
Конструкция рулевого управления во многом зависит от типа подвески передних
колес автомобиля. При независимой подвеске передних управляемых колес, которая
применяется на всех легковых автомобилях, в рулевое управление без усилителя
входят, см. рис. 9.1, а; при зависимой подвеске передних колес см.рис. 9.1, б.
34.2. Травмобезопасное рулевое управление
На легковых автомобилях находят широкое применение травмобезопасные рулевые управления. Травмобезопасное рулевое управление обеспечивает пассивную безопасность автомобиля — свойство уменьшать тяжесть последствий дорожно-транспортных происшествий.
Водитель может
получить травму от рулевого колеса или рулевого вала при резком перемещении
вперед вследствие лобового столкновения. Для уменьшения тяжести травм,
получаемых водителями при лобовых столкновениях, которые составляют более 50 %
всех дорожно-транспортных происшествий, применяют различные конструкции
травмобезопасных рулевых механизмов. С этой целью кроме рулевого колеса с
утопленной ступицей и двумя спицами, позволяющими значительно снизить тяжесть
наносимых травм при ударе, в рулевом механизме устанавливают специальное
энергопоглощающее устройство, а рулевой вал часто выполняют составным.
Для уменьшения тяжести травм,
получаемых водителями при лобовых столкновениях, которые составляют более 50 %
всех дорожно-транспортных происшествий, применяют различные конструкции
травмобезопасных рулевых механизмов. С этой целью кроме рулевого колеса с
утопленной ступицей и двумя спицами, позволяющими значительно снизить тяжесть
наносимых травм при ударе, в рулевом механизме устанавливают специальное
энергопоглощающее устройство, а рулевой вал часто выполняют составным.
На рис. 9.3, а
представлен рулевой механизм легкового автомобиля, рулевой вал которого состоит
из трех частей, соединенных карданными шарнирами 2, а роль энергопоглощающего
устройства выполняет специальное крепление рулевого вала к кузову автомобиля.
При лобовом столкновении, когда передняя часть автомобиля деформируется, рулевой
вал складывается и незначительно перемещается в салон кузова автомобиля. При
этом кронштейн 1 крепления рулевого вала деформируется и поглощает часть энергии
удара.
Рулевой механизм с энергопоглощающим устройством сильфонного типа показан на рис. 9.3, б. Рулевое колесо соединено с рулевым валом металлическим гофрированным цилиндром 3, который при столкновении деформируется, частично поглощает энергию удара и обеспечивает небольшое перемещение рулевого вала в сторону водителя.
Рис. 9.3. Травмобезопасные рулевые механизмы: 1 — кронштейн; 2 — карданный
шарнир; 3 — гофрированный цилиндр; 4 — перфорированная труба
На рис. 9.3, в представлен рулевой механизм, у которого верхняя часть рулевого вала выполнена в виде перфорированной трубы 4. Показаны также последовательный процесс и максимальная деформация верхней части рулевого вала, которая весьма значительна.
В травмобезопасных
рулевых управлениях легковых автомобилей применяются и другие энергопоглощающие
устройства, которые соединяют составные рулевые валы. К ним относятся резиновые
муфты специальной конструкции, а также устройства типа «японский фонарик»,
который выполнен в виде нескольких продольных пластин, приваренных к концам
соединяемых частей рулевого вала. При столкновениях резиновая муфта разрушается,
а соединительные пластины деформируются и уменьшают перемещение рулевого вала
внутрь салона кузова.
К ним относятся резиновые
муфты специальной конструкции, а также устройства типа «японский фонарик»,
который выполнен в виде нескольких продольных пластин, приваренных к концам
соединяемых частей рулевого вала. При столкновениях резиновая муфта разрушается,
а соединительные пластины деформируются и уменьшают перемещение рулевого вала
внутрь салона кузова.
содержание .. 40 41 42 43 44 45 46 47 48 49 50 ..
Назначение, расположение и устройство рулевого управления
Рулевое управление предназначено для изменения направления движения автомобиля путем поворота колес. Колеса, которые могут быть повернуты по желанию водителя, называются управляемыми.
Колеса, которые могут быть повернуты по желанию водителя, называются управляемыми.
На большинстве автомобилей управляемыми являются передние колеса. На некоторых моделях автомобилей, управляемыми являются все четыре колеса.
Рулевое управление автомобиля состоит из следующих основных узлов: привода рулевого механизма, рулевого механизма и привода управляемых колес.
Узлы рулевого управления автомобилей с передними управляемыми колесами расположены в передней части автомобиля. Рулевой механизм и привод управляемых колес обычно расположены в моторном отсеке.
Если вам нужны запчасти на ваш автомобиль, хотим порекомендовать вам отличный интернет-магазин запчастей для иномарок http://www.vollo.ru/.
На автомобилях со всеми управляемыми колесами задний рулевой механизм и задний привод управляемых колес расположены в зоне задней подвески.
В современных автомобилях в основном используются рулевые механизмы типа шестерня-рейка. Реже можно встретить автомобили с классическим механизмом червяк-ролик.
Рулевой механизм типа шестерня-рейка обладает легким ходом и практически не имеет люфта. Привод управляемых колес при такой схеме состоит из меньшего количества деталей. При вращении рулевого колеса поворачивается шестерня, закрепленная на рулевом вале (см. рисунок). Зубья шестерни воздействуют на зубья рейки, и рейка смещается. Смещение рейки передается тягами на поворотные рычаги, которые, в свою очередь, поворачивают передние колеса автомобиля.
Рулевой механизм типа червяк-ролик по большинству параметров уступает механизму типа «шестерня-рейка», его применение на современных моделях вызвано компоновочными соображениями. Рулевое управление с таким механизмом содержит большее количество шарнирных соединений (см. рисунок). Поскольку любые шарнирные соединения склонны к износу, их техническое состояние требует постоянного внимания.
При вращении рулевого колеса поворачивается глобоидальный червяк, связанный с рулевым валом Вращение червяка вызывает поворот ролика, закрепленного на валу сошки. Поворот сошки передается колесам через рулевую трапецию и поворотные рычаги.
Поворот сошки передается колесам через рулевую трапецию и поворотные рычаги.
определение рулевого управления по The Free Dictionary
Группа, которой мы сейчас руководили (хотя среди самых ранних европейских открытий в Южных морях, она была впервые посещена в 1595 году), по-прежнему проживает в квартирах существа, столь же странные и варварские, как и всегда. Чарли, который руководил, Казалось, у него был инстинкт для такого рода работы. Монтгомери, который был рулевым, поднес лодку ко мне, поднялся, схватил и привязал моего маляра к румпелю, чтобы буксировать меня, потому что на борту не было места. Прежде чем они достигли его подножия, они прошли еще одну большую тропу, повернув немного правее вершины горы. В наших самых тривиальных прогулках мы постоянно, хотя и бессознательно, рулим, как летчики, по известным маякам и мысу, и если мы выйдем за пределы нашего обычного курса, мы все еще будем держать в уме направление какого-нибудь соседнего мыса; и только когда мы полностью потеряемся или не повернемся — ибо человеку нужно только один раз повернуться с закрытыми глазами в этом мире, чтобы погибнуть, — мы не ценим необъятность и необычность природы.«Ты мне не понравишься, если ты столкнешь меня с кирпичной стеной», — сказала она, когда машина с треском упала на бордюр. «Обрати внимание на рулевое управление». Когда я вернулся на палубу, я обнаружил, что Волк Ларсен управляет в основном одной рукой. , а другой рукой он держал морские очки и изучал положение лодок, уделяя особое внимание положению Македонии. Да это и не очень легкое дело; потому что в его задней части огромное выступающее рулевое весло время от времени ударяет его по пояснице, а заднее весло совершает возвратно-поступательные движения, стуча его коленями впереди.
Прежде чем они достигли его подножия, они прошли еще одну большую тропу, повернув немного правее вершины горы. В наших самых тривиальных прогулках мы постоянно, хотя и бессознательно, рулим, как летчики, по известным маякам и мысу, и если мы выйдем за пределы нашего обычного курса, мы все еще будем держать в уме направление какого-нибудь соседнего мыса; и только когда мы полностью потеряемся или не повернемся — ибо человеку нужно только один раз повернуться с закрытыми глазами в этом мире, чтобы погибнуть, — мы не ценим необъятность и необычность природы.«Ты мне не понравишься, если ты столкнешь меня с кирпичной стеной», — сказала она, когда машина с треском упала на бордюр. «Обрати внимание на рулевое управление». Когда я вернулся на палубу, я обнаружил, что Волк Ларсен управляет в основном одной рукой. , а другой рукой он держал морские очки и изучал положение лодок, уделяя особое внимание положению Македонии. Да это и не очень легкое дело; потому что в его задней части огромное выступающее рулевое весло время от времени ударяет его по пояснице, а заднее весло совершает возвратно-поступательные движения, стуча его коленями впереди. А потом я остался совсем один на корме, управляя своим кораблем, который то и дело шёл против ветра с плавучей лифтом, и даже немного покачивался. Мне пришлось приложить усилие, чтобы отвлечься от его взгляда и обратить внимание на рулевое управление. Одной рукой я нащупал над головой линию парового свиста и поспешно выдёргивал визг за визгом. Сам инструмент находится под палубой, привязан как к рулевому устройству, так и к рычагам управления. матрос-крекерджек, — так она сказала, — крекерджек.- И я поехал на ее китовой лодке, Адаму Адам управлял и выглядел торжественно, как на похоронах.
А потом я остался совсем один на корме, управляя своим кораблем, который то и дело шёл против ветра с плавучей лифтом, и даже немного покачивался. Мне пришлось приложить усилие, чтобы отвлечься от его взгляда и обратить внимание на рулевое управление. Одной рукой я нащупал над головой линию парового свиста и поспешно выдёргивал визг за визгом. Сам инструмент находится под палубой, привязан как к рулевому устройству, так и к рычагам управления. матрос-крекерджек, — так она сказала, — крекерджек.- И я поехал на ее китовой лодке, Адаму Адам управлял и выглядел торжественно, как на похоронах.Устройство поворота луча
Заказы на закупку: Заказы на закупку принимаются в письменной форме, по факсу и электронной почте. Все заказы требуют немедленного письменного подтверждения.
Гарантия на продукцию: Наша гарантия на все наши механические компоненты и системы составляет ОДИН год с даты отгрузки. Ремонт или замена будут производиться бесплатно для продуктов с дефектами материалов и изготовления в течение этого периода.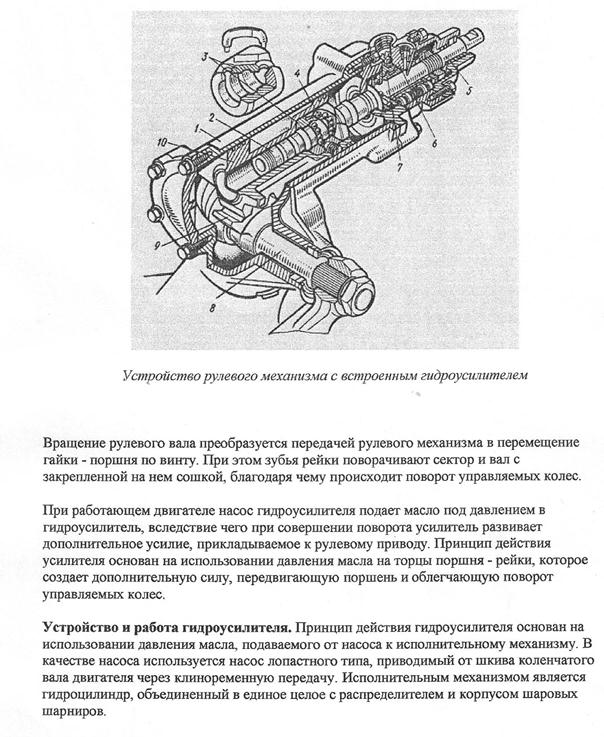 Гарантия на наши оптические компоненты составляет 30 дней с даты отгрузки. Неисправные элементы будут заменены бесплатно. Заказчик должен сообщить о любом дефекте оптических компонентов в течение 48 часов с момента получения. При любой замене по гарантии к возвращенным деталям требуется письменное заявление с авторизованной подписью с указанием причины отказа с приложением отчетов об испытаниях. Все дефектные товары должны быть возвращены в оригинальной транспортной таре в течение 10 дней с даты отгрузки.
Гарантия на наши оптические компоненты составляет 30 дней с даты отгрузки. Неисправные элементы будут заменены бесплатно. Заказчик должен сообщить о любом дефекте оптических компонентов в течение 48 часов с момента получения. При любой замене по гарантии к возвращенным деталям требуется письменное заявление с авторизованной подписью с указанием причины отказа с приложением отчетов об испытаниях. Все дефектные товары должны быть возвращены в оригинальной транспортной таре в течение 10 дней с даты отгрузки.
Котировки: Все расценки действительны в течение 90 дней с даты выставления.
Оплата: 100% предоплата до отгрузки. Клиенты, осуществляющие платежи международным банковским переводом, должны предоплатить все банковские сборы, включая все сборы, взимаемые банками-корреспондентами или посредниками.
Отгрузка и доставка: Стоимость доставки, таможенных пошлин и любых (если) сборов за посадку и т. Д. Будет дополнительной. Дата доставки является приблизительной, и мы не несем ответственности за несвоевременную или частичную доставку.мы можем отказаться от любого заказа по любой причине. Элементы каталога обычно отправляются сразу со склада. В случае, если товара нет на складе, предполагаемая дата доставки указывается во время заказа. Большинство товаров могут быть отправлены в течение 45 дней.
Дата доставки является приблизительной, и мы не несем ответственности за несвоевременную или частичную доставку.мы можем отказаться от любого заказа по любой причине. Элементы каталога обычно отправляются сразу со склада. В случае, если товара нет на складе, предполагаемая дата доставки указывается во время заказа. Большинство товаров могут быть отправлены в течение 45 дней.
Установка: Возможна установка нашего оборудования на месте за счет покупателя.
Спецификации: HOLMARC оставляет за собой право изменять, изменять или иным образом улучшать все элементы в спецификациях каталога без предварительного уведомления.
Налоги: Мы взимаем общий налог с продаж с поставок, если покупатель не предоставит нам подписанный официальный сертификат освобождения от налога с продаж вместе с заказом. Покупки, совершенные за пределами нашего региона, облагаются государственным или местным налогом с продаж / использования, если таковой имеется, и другими налогами, подлежащими уплате в связи с этой транзакцией.
Ремонт: Если на ваше устройство не распространяется гарантия, но требуется ремонт, пожалуйста, свяжитесь с нами и сообщите подробности о повреждении.
АВТОМОБИЛИ. Оборудование для автоматического управления рулевым управлением транспортного средства Устройство для автоматического управления рулевым управлением любого дорожного транспортного средства без водителя.
Презентация на тему: «АВТОУПРАВЛЕНИЕ. Оборудование для автоматического управления рулевым управлением транспортного средства. Устройство для автоматического управления рулевым управлением любого дорожного транспортного средства без водителя». — Расшифровка презентации:
1
АВТОМОБИЛЬ. Оборудование для автоматического управления рулевым управлением транспортного средства Устройство для автоматического управления рулевым управлением любого дорожного транспортного средства без вмешательства водителя и минимальных изменений внутренней механики транспортного средства.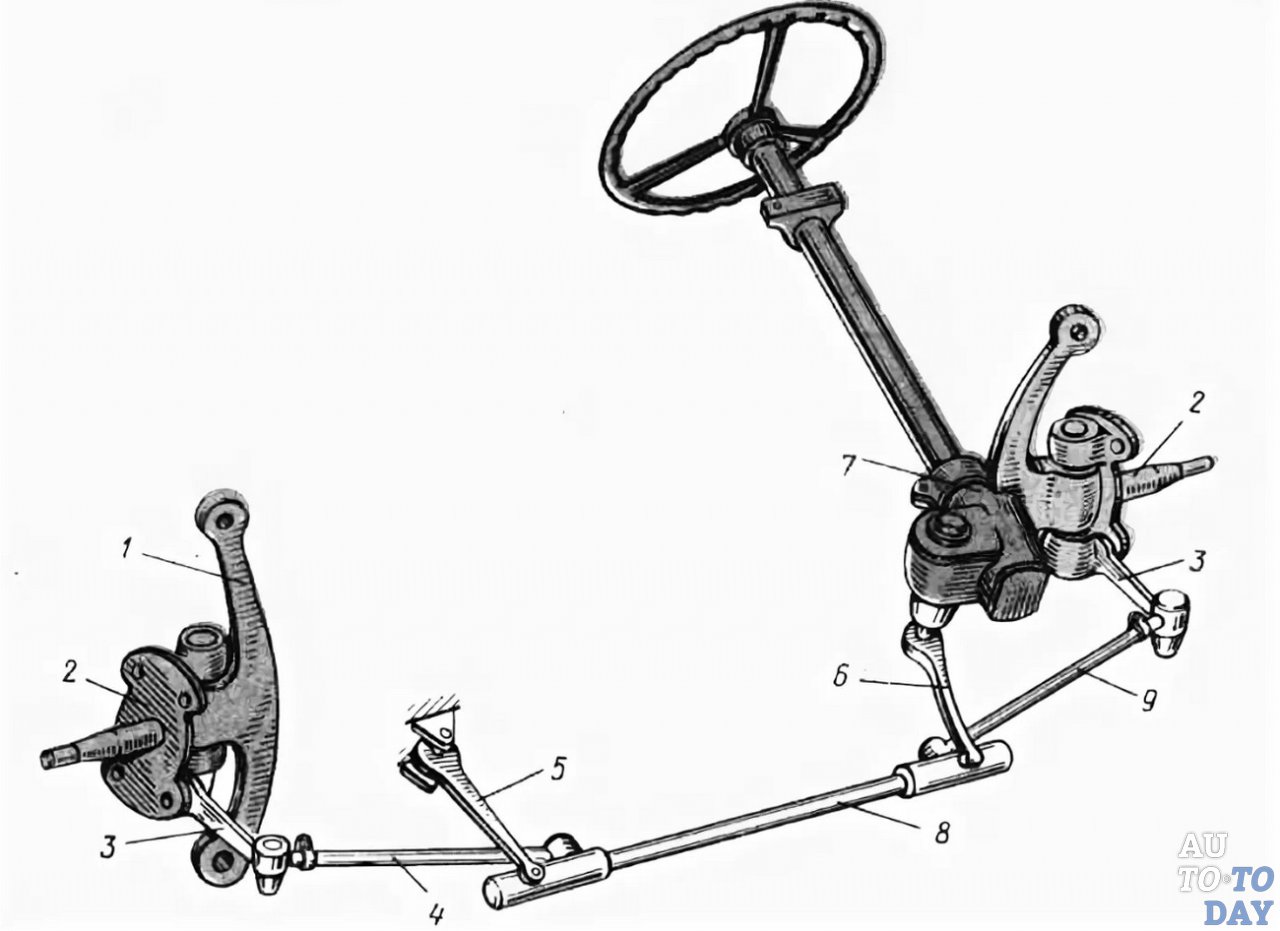 Настоящее изобретение представляет собой оборудование, которое позволяет управлять рулевым управлением транспортного средства с помощью контроллера путем автоматизации рулевого колеса без вмешательства водителя. Это решение преодолевает проблемы, существующие в современном уровне техники. Таким образом, он не зависит от типа транспортного средства и типа помощи при рулевом управлении (электрическая или гидравлическая), включая наличие или отсутствие такой помощи. Это изобретение не вносит постоянных изменений в транспортное средство и не мешает управлению автомобилем. Кроме того, соединение или разъединение одиночного режима контролируется автоматически, и никакие ручные и другие разработки не выполняются, имея возможность выполнять перемещение и мгновенно с того же процессора, который контролирует направление, и водитель не теряет полный контроль над направлением движения. транспортное средство.Устройство было установлено на транспортном средстве и использовалось для реализации системы автоматического предотвращения столкновений.
Настоящее изобретение представляет собой оборудование, которое позволяет управлять рулевым управлением транспортного средства с помощью контроллера путем автоматизации рулевого колеса без вмешательства водителя. Это решение преодолевает проблемы, существующие в современном уровне техники. Таким образом, он не зависит от типа транспортного средства и типа помощи при рулевом управлении (электрическая или гидравлическая), включая наличие или отсутствие такой помощи. Это изобретение не вносит постоянных изменений в транспортное средство и не мешает управлению автомобилем. Кроме того, соединение или разъединение одиночного режима контролируется автоматически, и никакие ручные и другие разработки не выполняются, имея возможность выполнять перемещение и мгновенно с того же процессора, который контролирует направление, и водитель не теряет полный контроль над направлением движения. транспортное средство.Устройство было установлено на транспортном средстве и использовалось для реализации системы автоматического предотвращения столкновений. «Универсальное устройство для любого типа транспортного средства для управления рулевым управлением дорожного транспортного средства без вмешательства водителя» Технологическое решение Под решением понимается оборудование, позволяющее управлять рулевым управлением дорожного транспортного средства с помощью контроллера без вмешательства водителя путем автоматизации рулевого управления. Следовательно, это устройство, встроенное в автомобиль, которое включает в себя узел, содержащий электродвигатель, который приводит в движение зубчатое колесо, которое входит в зацепление с цепью, прикрепленной к другому зубчатому колесу устройства тормозной колонки.Чтобы связать или отсоединить по желанию в любое время вращение электродвигателя и рулевой колонки, переключение с ручного на автоматический или наоборот, муфта состоит из электромагнита. Сферы применения Сектор 1: ИКТ, применяемые к мобильности, интеллектуальным транспортным системам Сектор 2: Транспортное приложение Технологическое решение, поддерживаемое Мадридским техническим университетом
«Универсальное устройство для любого типа транспортного средства для управления рулевым управлением дорожного транспортного средства без вмешательства водителя» Технологическое решение Под решением понимается оборудование, позволяющее управлять рулевым управлением дорожного транспортного средства с помощью контроллера без вмешательства водителя путем автоматизации рулевого управления. Следовательно, это устройство, встроенное в автомобиль, которое включает в себя узел, содержащий электродвигатель, который приводит в движение зубчатое колесо, которое входит в зацепление с цепью, прикрепленной к другому зубчатому колесу устройства тормозной колонки.Чтобы связать или отсоединить по желанию в любое время вращение электродвигателя и рулевой колонки, переключение с ручного на автоматический или наоборот, муфта состоит из электромагнита. Сферы применения Сектор 1: ИКТ, применяемые к мобильности, интеллектуальным транспортным системам Сектор 2: Транспортное приложение Технологическое решение, поддерживаемое Мадридским техническим университетом
2
Конкурентные преимущества Решение не зависит от типа транспортного средства. Установка технологии не требует постоянной модификации транспортного средства.Рулевое управление не обязано отдавать приказы через внутреннюю автобусную связь транспортного средства. Включение или выключение автономного режима контролируется автоматически и может осуществляться в движении. Водитель не теряет полного контроля над направлением движения автомобиля. Блокировка и опора съемные. Источники Решения по автоматизации транспортных средств исследовательской группы применялись в проектах, финансируемых такими компаниями, как Siemens, UAH Universities, а также в конкурсных проектах с государственным финансированием в Испании. Исследовательская группа имеет опыт работы более 10 лет в этой области и опубликовала более 40 статей в журналах. «К 2050 году большинство транспортных средств будут автономными» Требования рынка Сектор 1: ИКТ, применяемые к мобильности, интеллектуальные транспортные системы Автономные транспортные средства были определены как тренд 2014 года различными СМИ.
Установка технологии не требует постоянной модификации транспортного средства.Рулевое управление не обязано отдавать приказы через внутреннюю автобусную связь транспортного средства. Включение или выключение автономного режима контролируется автоматически и может осуществляться в движении. Водитель не теряет полного контроля над направлением движения автомобиля. Блокировка и опора съемные. Источники Решения по автоматизации транспортных средств исследовательской группы применялись в проектах, финансируемых такими компаниями, как Siemens, UAH Universities, а также в конкурсных проектах с государственным финансированием в Испании. Исследовательская группа имеет опыт работы более 10 лет в этой области и опубликовала более 40 статей в журналах. «К 2050 году большинство транспортных средств будут автономными» Требования рынка Сектор 1: ИКТ, применяемые к мобильности, интеллектуальные транспортные системы Автономные транспортные средства были определены как тренд 2014 года различными СМИ. Системы автономного вождения: при определенных условиях автономное вождение является более безопасной и более эффективной альтернативой, согласно исследованиям, которые утверждают, что автономное вождение значительно сокращает количество аварий и смертей на дорогах.Среди целей European Horizon 2020 ИКТ, применяемые на транспорте, играют важную роль, это одна из конкретных тем, связанных с автоматизацией. Ожидается, что автономные транспортные средства не только уменьшат количество аварий (по некоторым оценкам, количество аварий приближается к нулю), но также уменьшат выбросы и загрязнение из-за более эффективного вождения транспортных средств. Сектор 2: Транспортное приложение. Многочисленные исследования транспортных средств нуждаются в автоматизации транспортных средств для тестирования их разработок, например, систем предотвращения столкновений для автономного вождения или даже в качестве поддержки систем динамической индукции нагрузки.После успешного тестирования Google большинство производителей автомобилей участвовали в гонке автономных транспортных средств. Потенциал рынка Годовые продажи автономных транспортных средств увеличатся с 230 000 единиц в 2025 году до 11,8 миллионов в 2035 году [IHS Automotive]. В 2035 году ожидается, что около 54 миллионов автомобилей будут беспилотными на наших дорогах [IHS Automotive]. В 2040 году 75% транспортных средств на дорогах будут автономными [IEEE]. В 2050 году большинство автомобилей будут автономными [IHS Automotive].В штате Невада разрешено автономное вождение, а в Калифорнии ведутся законодательные дебаты [Forbes]. Автопроизводители потратили более 10 миллиардов долларов на «продвинутые системы помощи водителю» в 2011 году и, как ожидается, вырастут до 130 миллиардов в 2016 году [ABI Research]. IPR Патент выдан в Испании. P201330627 Стадия разработки Контактное лицо по автомобильному управлению Фелипе Хименес e: felipe.jimenez @ upm.esfelipe.jimenez @ upm.es José Eugenio Naranjo e: joseeugenio.naranjo @ upm.esjoseeugenio.naranjo @ contact Innovation. Сфера коммерциализации и предпринимательства Центр поддержки технологических инноваций — UPM e: Innovacion.
Системы автономного вождения: при определенных условиях автономное вождение является более безопасной и более эффективной альтернативой, согласно исследованиям, которые утверждают, что автономное вождение значительно сокращает количество аварий и смертей на дорогах.Среди целей European Horizon 2020 ИКТ, применяемые на транспорте, играют важную роль, это одна из конкретных тем, связанных с автоматизацией. Ожидается, что автономные транспортные средства не только уменьшат количество аварий (по некоторым оценкам, количество аварий приближается к нулю), но также уменьшат выбросы и загрязнение из-за более эффективного вождения транспортных средств. Сектор 2: Транспортное приложение. Многочисленные исследования транспортных средств нуждаются в автоматизации транспортных средств для тестирования их разработок, например, систем предотвращения столкновений для автономного вождения или даже в качестве поддержки систем динамической индукции нагрузки.После успешного тестирования Google большинство производителей автомобилей участвовали в гонке автономных транспортных средств. Потенциал рынка Годовые продажи автономных транспортных средств увеличатся с 230 000 единиц в 2025 году до 11,8 миллионов в 2035 году [IHS Automotive]. В 2035 году ожидается, что около 54 миллионов автомобилей будут беспилотными на наших дорогах [IHS Automotive]. В 2040 году 75% транспортных средств на дорогах будут автономными [IEEE]. В 2050 году большинство автомобилей будут автономными [IHS Automotive].В штате Невада разрешено автономное вождение, а в Калифорнии ведутся законодательные дебаты [Forbes]. Автопроизводители потратили более 10 миллиардов долларов на «продвинутые системы помощи водителю» в 2011 году и, как ожидается, вырастут до 130 миллиардов в 2016 году [ABI Research]. IPR Патент выдан в Испании. P201330627 Стадия разработки Контактное лицо по автомобильному управлению Фелипе Хименес e: felipe.jimenez @ upm.esfelipe.jimenez @ upm.es José Eugenio Naranjo e: joseeugenio.naranjo @ upm.esjoseeugenio.naranjo @ contact Innovation. Сфера коммерциализации и предпринимательства Центр поддержки технологических инноваций — UPM e: Innovacion.