Виды электродвигателей. Статьи компании «ООО «РПО Электродвигатель»»
Изобретение электрических двигателей ускорило развитие промышленности и улучшило качество жизни. Агрегаты востребованы во многих производственных отраслях, в транспорте, в быту. Создано много видов электромоторов, но их конструкция и принцип работы остаются неизменными.
Основные виды электродвигателей
Электрические моторы — агрегаты, в которых происходит преобразование электрической энергии в механическую, чтобы привести в движение всевозможные механизмы. Разделяются на два основных вида: постоянного и переменного тока (асинхронные или синхронные). В зависимости от конструкции все электромашины постоянного тока разделяют на коллекторные или бесколлекторные.
Двигатели переменного тока представлены синхронными или асинхронными моделями. Первые востребованы при производстве устройств с высокой мощностью. Асинхронные моторы получили большое производственное и бытовое распространение.
Преимущества электромоторов
Все электродвигатели устроены одинаково: внутри расположен статор, где вращается ротор.
- Простая конструкция. Количество узлов минимально, в связи с чем агрегат редко выходит из строя.
- Самостоятельный пуск. Для старта не требуется пусковой импульс, мотор начинает вращение самостоятельно после включения электропитания.
- Отсутствие вибраций. При правильной балансировке ротора двигатели не шумят, не вибрируют.
- Лёгкое управление оборотами и крутящим моментом.
- Наличие реверса. На коллекторном двигателе для этого меняют местами полюса якоря, на трёхфазном электромоторе – корректируют последовательность включения фаз.
Важный плюс — обратимость. Коллекторные устройства при внешнем приводе начинают работать как электрогенераторы, что позволяет использовать их для рекуперации энергии при торможении электротранспорта.
Компания «РПО-Электродвигатель» занимается продажей высоковольтных и низковольтных электродвигателей. Располагаем собственным производственным цехом, где изготавливаем оборудование по техническому заданию заказчика. Гарантируем оперативность выполняемых услуг при высоком качестве исполнения.
Располагаем собственным производственным цехом, где изготавливаем оборудование по техническому заданию заказчика. Гарантируем оперативность выполняемых услуг при высоком качестве исполнения.
Производим электромоторы с возможностью модернизации и совершенствования по желанию заказчика. Звоните и заказывайте!
Виды электродвигателей и их особенности
Электродвигатели эффективное оборудование, которое отличается от других агрегатов многочисленными преимуществами. Их можно устанавливать на небольших площадках, например, на различных станках, в оборудовании электротранспорта. В отличие от двигателя внутреннего сгорания, электродвигатель обладает высоким КПД 90-95% по сравнению с 22-60%.
В процессе работы они практически не выделяют вредных выхлопов, так как применение нефтяного топлива, моторного или трансмиссионного масла не требуется.
Различают такие типы электродвигателей:
- постоянного и переменного тока;
- шаговые;
- линейные;
- серводвигатели.

Электродвигатели переменного тока бывают синхронными и асинхронными.
Особенности электродвигателей постоянного тока
Агрегат приводится в движение путем воздействия постоянного тока. Его используют для создания регулируемых электроприводов, к которым предъявляют повышенные требования по эксплуатации. Такой двигатель отличается высокой равномерностью вращения и способностью перезагрузки.
Электродвигатели постоянного тока имеют небольшие габариты, легко управляются, быстро запускаются. Их используют для комплектации электротранспорта, промышленного оборудования, подъемно-транспортных механизмов.
Электродвигатели переменного тока
Такие устройства более востребованы, чем двигатели постоянного тока. Их используют не только в промышленной, но и в бытовой сфере. Они имеют простую и прочную конструкцию, не требуют особого обслуживания. Электродвигатели переменного тока просты в эксплуатации.
Агрегатами такого типа оснащаются практически все виды бытовой техники (стиральные машины-автомат, кухонные вытяжки).
Электродвигатели также используют в промышленности для приведения в действие тяжелых станков, пневматического и гидравлического насосного оборудования, манипуляторов для перемещения тяжелых грузов.
Характеристики шаговых электродвигателей
Такие агрегаты переводят электричество в механическое движение. Они часто устанавливаются в компьютерах и различной офисной технике. Двигатели такого типа имеют небольшой размер, но при этом обладают высокой производительностью.
Серводвигатели
Эта разновидность относится к двигателям постоянного тока. Агрегат представляет собой вращающийся двигатель с датчиком обратной связи. Такая конструкция позволяет контролировать угловое положение, а также скорость и ускорение исполнительного механизма.
Двигатель обладает высокой мощностью. Его используют для оборудования поточных линий, а также комплектации промышленного станочного оборудования.
Синхронные двигатели
Синхронные электродвигатели являются разновидностью электродвигателей переменного тока. Они работают с постоянной скоростью. Частота вращения ротора равна частоте вращения магнитного поля в воздушном зазоре. Двигатели данного типа используют для комплектации генераторов постоянного тока, компрессоров, промышленных насосов – там, где требуется большая мощность.
Они работают с постоянной скоростью. Частота вращения ротора равна частоте вращения магнитного поля в воздушном зазоре. Двигатели данного типа используют для комплектации генераторов постоянного тока, компрессоров, промышленных насосов – там, где требуется большая мощность.
Скорость вращения стабильна при перегрузках и просадках.
Асинхронные двигатели
Асинхронные электродвигатели принадлежат к группе электродвигателей переменного тока. В зависимости от конструкции ротора, они бывают короткозамкнутыми и фазными. От этого зависит обмотка статора.
Асинхронные двигатели бывают одно- и трехфазными.
К их преимуществам относят простоту конструкции, неприхотливость в эксплуатации, высокий коэффициент мощности.
Самый мощный электромотор для лодки
Какой лодочный электромотор считать самым мощным? Тот, который потребляет большую мощность от аккумуляторной батареи? Или может быть тот, который легко толкает вперед даже тяжелую лодку, потребляет маленький ток и долго работает от аккумуляторов?
Содержание статьи
Бензиновый и электрический моторы для лодки
Лодочные электромоторы могут развивать ту же тягу, что и двигатели внутреннего сгорания обладая при этом значительно меньшей мощностью на валу. Это происходит благодаря различной форме кривых крутящего момента электрического и бензинового двигателей. У двигателя внутреннего сгорания график крутящего момента имеет выраженный пик, из-за которого максимальный момент доступен только в ограниченном диапазоне оборотов вала. Зависимость крутящего момента от оборотов у электродвигателя гораздо более плоская и его достаточно при любой частоте вращения

Пологая характеристика момента позволяет устанавливать на лодочные электромоторы более эффективные гребные винты. КПД гребного винта у некоторых электромоторов для небольших лодок в три раза выше, чем у подвесных бензиновых двигателей того же класса.
Какая бывает мощность
Производители лодочных моторов используют разные виды мощности. Встречаются мощность на валу, потребляемая мощность и даже тяга. Поэтому прежде чем сравнивать лодочные электромоторы различных марок нужно привести имеющиеся данные к «общему знаменателю»
Единый критерий для сравнения важен. Мощности, измеренные в разных местах, существенно отличаются друг от друга. Мотор, развивающий на валу 4 л. с., на винте выдает всего 1 л.с.
Потребляемая мощность, на валу и на винте
Гребной винт преобразует энергию двигателя в силу, которая преодолевая сопротивления воды и воздуха двигает лодку вперед с выбранной скоростью. Часть энергии при этом теряется и мощность, идущая на движение судна, всегда меньше той, что потребляет двигатель.
Потребляемая мощность – часто используется как характеристика электродвигателя для лодки (мощность = ток х напряжение). Измеряется в Ваттах или лошадиных силах. Производители бензиновых или дизельных лодочных моторов этот вид мощности не используют. Однако для двигателя внутреннего сгорания потребляемую мощность также можно посчитать, если умножить теплотворную способность топлива на его расход.
Мощность на валу – используют производители подвесных бензиновых лодочных моторов. Этот вид мощности считается также как у автомобиля (мощность = крутящий момент х угловая скорость). Единица измерения – лошадиные силы или ватты. Мощность на валу учитывает потери в редукторе, но не учитывает потери на винте, которые составляют от 20 до 70%.
Мощность на винте – более ста лет служит общепринятой характеристикой двигателя в судостроении. Учитывает все потери мощности и определяет энергию, передаваемую лодке двигателем.
Учитывает все потери мощности и определяет энергию, передаваемую лодке двигателем.
Тяга лодочного электромотора
Во время вращения винта на поверхностях лопастей возникает подъемная сила. Составляющая этой силы направленная по оси движения лодки называется упором или тягой. Она характеризует ту часть подъемной силы, которая толкает судно вперед.
Полезная мощность, производимая лодочным винтом, равна его тяге, умноженной на текущую скорость лодки. В характеристиках электромоторов производители всегда указывают максимальное значение тяги. Сделать по ней вывод о мощности электромотора на винте без установки датчиков и проведения измерений нельзя.
Тягу определяют в ходе испытаний, во время которых лодку соединяют с пирсом динамометром и заставляют двигаться вперед. Проверку проводят на спокойной воде, в безветренную погоду, на достаточной глубине и расстоянии от берега. Для носовых лодочных электромоторов значение тяги чаще всего указывают в фунтах силы (lbs).
Потери мощности в лодочном электромоторе
Ротор, щеточный узел и щетки лодочного электромотора. Щетки и кольца служат источником потерь и снижают надежность электромотора. В мощных лодочных электромоторах двигатели постоянного тока не используют
Щетки и кольца служат источником потерь и снижают надежность электромотора. В мощных лодочных электромоторах двигатели постоянного тока не используютОбщая эффективность силовой установке на лодке с двигателем внутреннего сгорания около 15%. Для судна с электромотором такой показатель – непозволительная роскошь. Считается, что лодочный электродвигатель работает эффективно, если с учетом потерь на винте его КПД около 50 %. При этом КПД электромотора должен быть не менее 80%, а винта не мене 63%.
Потери мощности пропорциональны сопротивлению проводника и квадрату протекающего через него тока. Если ток возрастает вдвое, потери возрастают в четыре раза. Если ток растет в десять раз, потери увеличиваются в сто. Уменьшить ток и потери можно, если повысить напряжение в цепи.
Общепринятое на сегодня напряжение мощных лодочных электромоторов 48 вольт, но для небольших лодок подходят и 24-вольтовые модели. При силе тока 50 А максимальная мощность электромотора в 12-вольтовой системе составит 600 Ватт, а в 24 Вольтовой – 1200 Ватт
Второй способ снизить потери в цепи постоянного тока – это увеличить сечение кабеля. Правильно подобранный кабель повышает эффективность и безопасность электрической системы, устраняет локальный перегрев и снижает потери энергии.
Правильно подобранный кабель повышает эффективность и безопасность электрической системы, устраняет локальный перегрев и снижает потери энергии.
Винт
Высокий КПД имеет винт с большим диаметром, шагом и низкой скоростью вращения. Однако с таким винтом может работать только мотор, развивающий высокий крутящий момент.
Редуктор служит источником дополнительного шума и потерь. В профессиональных электромоторах их стараются не использоватьБольшинство гребных винтов для подвесных моторов небольших лодок созданы на основе испытаний проведенных еще в 1940–1960-х годах прошлого века. Общие принципы проектирования, появившиеся тогда, систематизированы в виде таблиц и графиков и используются изготовителями до сих пор.
При разработке современных винтов используют другой подход. Сначала на компьютере создают трехмерную модель, а затем шаг и кривизну профиля винта оптимизируют для каждого сечения с учетом изменяющихся вдоль диаметра условий обтекания потоком воды. Винты этого типа называют винтами с переменным шагом. Их потери меньше, а КПД выше.
Их потери меньше, а КПД выше.
Виды электромоторов
Подвесные
Подвесной лодочный электромотор для профессионального использования AquamotПодвесные электромоторы устанавливают на транце или реже на носу лодки. В стандартном исполнении электромотор соединяется с системой рулевого управления, в моделях с румпелем лодкой управляют поворачивая двигатель. Мощность румпельных электромоторов варьируется от 1 до 4 кВт, а у моделей с рулевым управлением достигает 15 кВт.
Как правило мощные подвесные электромоторы рассчитаны на напряжение 24-48 Вольт. 24 вольтовый электрический двигатель мощностью 2,2 кВт развивает на винте тягу 124 lbs и сопоставим по этому показателю с подвесным бензиновым мотором мощностью 6,5 л.с. Двигатель мощностью 15 кВт эквивалентен бензиновому мотору 35 л.с
В подвесных лодочных электромоторах используют асинхронные двигатели переменного тока или синхронные двигатели на постоянных магнитах. Оба типа двигателей бесщеточные, не имеют изнашивающихся частей и не требуют обслуживания.
Pod электромоторы
POD электромоторы подходят как для однокорпусных лодок и катеров, так и для катамаранов
Фиксированные POD электромоторы бывают мощностью от 1 до 25 кВт. Они подходят как для небольших лодок, сдающихся в прокат, так и для судов весом несколько тоннЭлектромотор состоит из блока управления и гондолы внутри которой установлен асинхронный или BLDC электродвигатель. Гондола аэродинамической формы крепится к днищу судна фланцами из нержавеющей стали между килем и рулем. Чтобы избежать вибрации на руле, вызванной турбулентностью за винтом, и снизить сопротивление потоку воды гондолу стараются располагать ближе к килю.
Фиксированный (слева) и поворотный Pod электромоторы. Внутри корпуса, находящегося под водой, находится только двигатель. Электроника и органы управления расположены на борту суднаПроизводится две модификации POD электромоторов — фиксированная и поворотная. Поворотная модель соединяется с системой рулевого управления или румпелем и обеспечивает более высокую маневренность судна
Электрические лодочные моторы типа Pod выпускаются мощностью от 1 до 25 кВт.
Бортовые лодочные электромоторы
Бортовой лодочный электромотор Aquamot. Электромоторы этого типа выпускаются мощностью от 2,5 до 30 кВТВ бортовой силовой установке электродвигатель устанавливают внутри судна и соединяют с винтом валопроводом. Бортовым моторам требуется принудительное охлаждение. В зависимости мощности электродвигателя оно может быть воздушным или водяным.
Установка бортового электромотора на лодку сложнее чем подвесного или POD. Дополнительно потребуется вал, муфта, сальник, втулка Гудрича (дейдвудный подшипник), дейдвудная труба. Валы электромотора и винта необходимо центрировать – они должны иметь общую ось. При неправильной установке возможны протечки через сальник
Электромоторы для профессионального использования
Если лодка или катер используется для перевозки туристов, организации экскурсий или водных прогулок, то электрическая установка может оказаться выгоднее двигателя внутреннего сгорания. Экономия достигается из-за более низкой стоимости энергии и практически нулевых затрат на техническое обслуживание.
Сравнение показывает, что при коммерческой эксплуатации судна переход с бензинового на электрический двигатель окупается за 1-2 года. Однако для этого профессиональный лодочный электромотор должен отвечать определенным требованиям:
- Иметь высокий КПД – это позволит эксплуатировать его с аккумуляторной батареей меньшей емкости, снизит первоначальные затраты, время зарядки и стоимость потребляемой электроэнергии
- Быть простым и надежным — электромотор должен выдерживать ежедневную интенсивную нагрузку и иметь минимум лишних функций. Дополнительные возможности, такие как встроенный компьютер c GPS, повышают цену и могут стать источником неисправностей в будущем.
- Стоимость ремонта и технического обслуживания в течении периода эксплуатации должна быть минимальной Катамаран с установленным лодочным электромотором отправляется к месту эксплуатации
Надежность
Корпуса профессиональных лодочных электромоторов отливают из алюминия, а затем дополнительно наносят многослойное антикоррозионное покрытие. Вал делают из нержавеющей стали, а винт из бронзы. Для защиты от коррозии устанавливают жертвенный анод
Вал делают из нержавеющей стали, а винт из бронзы. Для защиты от коррозии устанавливают жертвенный анод
В мощных электромоторах для лодок используют асинхронные двигатели переменного тока или BLDC PM электродвигатели, которые также называют вентильными. Питание вентильных двигателей осуществляется от импульсных источников энергии. При этом импульсы напряжения подаются на обмотки статора в заданные моменты времени – при определенном положении ротора относительно статора. Положение ротора определяют датчики, которые, как и импульсный источник питания, в моторах небольшой мощности находятся на печатной плате, расположенной внутри подводной части электромотора.
Зеленая плата в центре электромотора — электронный коммутатор, который заменяет щетки и кольца. Слева та же плата в увеличенном виде. В окружении воды электронные компоненты иногда работают не стабильно и отказ всего одного элемента на плате влечет за собой выход из строя всего электромотора. Заменять приходится плату целиком — это увеличивает стоимость ремонта, время простоя электромотора и срок его окупаемости при профессиональном использованииВнутри корпуса трехфазного асинхронного двигателя дополнительных электронных компонентов нет. На долговечность двигателя влияют только подшипники и обмотки, однако качество этих элементов в настоящее время таково, что асинхронные двигатели служат до 50 000 часов без осмотра и ремонта. Асинхронные двигатели просты, надежны и эффективны. КПД мощного электродвигателя 85-92%, что на 30% выше, чем у двигателя постоянного тока, и на 40-50% больше, чем у двигателя внутреннего сгорания.
На долговечность двигателя влияют только подшипники и обмотки, однако качество этих элементов в настоящее время таково, что асинхронные двигатели служат до 50 000 часов без осмотра и ремонта. Асинхронные двигатели просты, надежны и эффективны. КПД мощного электродвигателя 85-92%, что на 30% выше, чем у двигателя постоянного тока, и на 40-50% больше, чем у двигателя внутреннего сгорания.
Система безопасности электромотора для коммерческих лодок имеет как механические, например, заданный предел прочности киля, так и электронные средства защиты. Электромотор отключается при перегрузке по току, при пониженном и повышенном напряжении аккумуляторов
Экономичность
Два подвесных электромотора мощностью по 11 кВт каждый на небольшом пароме для перевозки пассажировВысокий КПД достигается только при последовательном и тщательном улучшении всех элементов электромотора. Потерь мощности стараются избежать во всех узлах. Воздушный зазор в двигателе, конструкция ротора, изоляция обмоток оптимизируют на компьютере так, чтобы электродвигатель подходил для использования на лодках.
Корпуса двигателей и винты проектируют по тем же правилам, что и в коммерческом судостроении. Сначала рассчитывают обтекание подводных частей по трехмерной модели, а затем результаты проверяют на натурных гидродинамических испытаниях.
Редуктор, который устанавливают на некоторых моделях лодочных электромоторов не используют. Вместо этого вал электродвигателя напрямую соединяют с винтом, и конструируют двигатель таким образом, чтобы его обороты совпадали с оптимальными для винта
В результате во время движения электромотор не теряет мощность, не создает дополнительное сопротивление и способен долго работать на одной зарядке аккумулятора
Типы асинхронных электродвигателей ☀ Электродвигатель АИР и АИРЕ
Асинхронный электродвигатель
Электродвигатели Аир или однофазные, использующие для своей работы вращающееся магнитное поле статора, являются в настоящее время весьма распространенными электрическими машинами. Те из них, у которых частота вращения ротора отличается от частоты вращения магнитного поля статора, называются асинхронными двигателями
Те из них, у которых частота вращения ротора отличается от частоты вращения магнитного поля статора, называются асинхронными двигателями
В связи с большими мощностями энергетических систем и большой протяженностью электрических сетей энергоснабжение потребителей всегда осуществляется на переменном токе. Поэтому естественно стремление к максимальному использованию электрических двигателей переменного тока. Это, казалось бы, освобождает от необходимости многократного преобразования энергии.
К сожалению, двигатели переменного тока по своим свойствам, и прежде всего по управляемости, существенно уступают двигателям постоянного тока, поэтому они используются преимущественно в установках, где не требуется регулирование скорости.
Относительно недавно начали активно использоваться регулируемые системы переменного тока с подключением электродвигателей переменного тока через частотные преобразователи.
Асинхронный электродвигатель с короткозамкнутым ротором представляет собой вращающийся трансформатор, первичная обмотка которого — это статор, а вторичная — ротор. Между статором и ротором находится воздушный зазор. Как и в любом реальном трансформаторе, каждая обмотка имеет также и собственное активное сопротивление.
Между статором и ротором находится воздушный зазор. Как и в любом реальном трансформаторе, каждая обмотка имеет также и собственное активное сопротивление.
При подключении двигателя в электрическую сеть в статоре возникает магнитное поле, которое вращается синхронно с частотой питающей сети. За счет явления электромагнитной индукции под действием магнитного поля статора в электрически замкнутых обмотках ротора возникает электрический ток.
Наведенный электрический ток ротора создаст собственное магнитное поле, которое вступает во взаимодействие с вращающимся магнитным полем статора. В результате ротор начинает вращаться, и на валу двигателя возникает механический момент, пропорциональный току статора.
Характерной особенностью асинхронного электродвигателя является то, что за счет взаимодействия полей статора и ротора скорость вращения вала двигателя несколько меньше, чем частота питающей сети. Разность между частотой питающей сети и скоростью вращения называют скольжением.
Разность между частотой питающей сети и скоростью вращения называют скольжением.
Виды электродвигателей
Очень широко применяются в различных отраслях хозяйства и производства асинхронные двигатели в силу простоты их изготовления и высокой надежности. Между тем, можно выделить четыре основных типа асинхронных электромоторов:
- однофазный асинхронный двигатель аире с короткозамкнутым ротором;
- двухфазный асинхронный двигатель с короткозамкнутым ротором;
- трехфазный асинхронный электродвигатель аир с короткозамкнутым ротором;
- трехфазный асинхронный двигатель с фазным ротором.
Однофазный двигатель на 220 В содержит на статоре лишь одну рабочую обмотку, на которую в процессе работы двигателя подается переменный ток. Но для пуска двигателя на его статоре есть и дополнительная обмотка, которая кратковременно подключается к сети через конденсатор или индуктивность, либо замыкается накоротко. Это необходимо для создания начального сдвига фаз, чтобы ротор начал вращаться, иначе пульсирующее магнитное поле статора не столкнуло бы ротор с места.
Это необходимо для создания начального сдвига фаз, чтобы ротор начал вращаться, иначе пульсирующее магнитное поле статора не столкнуло бы ротор с места.
Ротор такого двигателя, как и любого другого асинхронного двигателя с короткозамкнутым ротором, представляет собой цилиндрический сердечник с залитыми алюминием пазами, с одновременно отлитыми вентиляционными лопастями. Такой ротор, типа «беличья клетка» и называется короткозамкнутым ротором. Однофазные электромоторы применяются в маломощных приборах, таких как комнатные вентиляторы или небольшие насосы.
Двухфазные асинхронные двигатели наиболее эффективны при работе от однофазной сети переменного тока. Они содержат на статоре две рабочие обмотки, расположенные перпендикулярно, причем одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так получается вращающееся магнитное поле, а без конденсатора ротор бы сам не сдвинулся с места.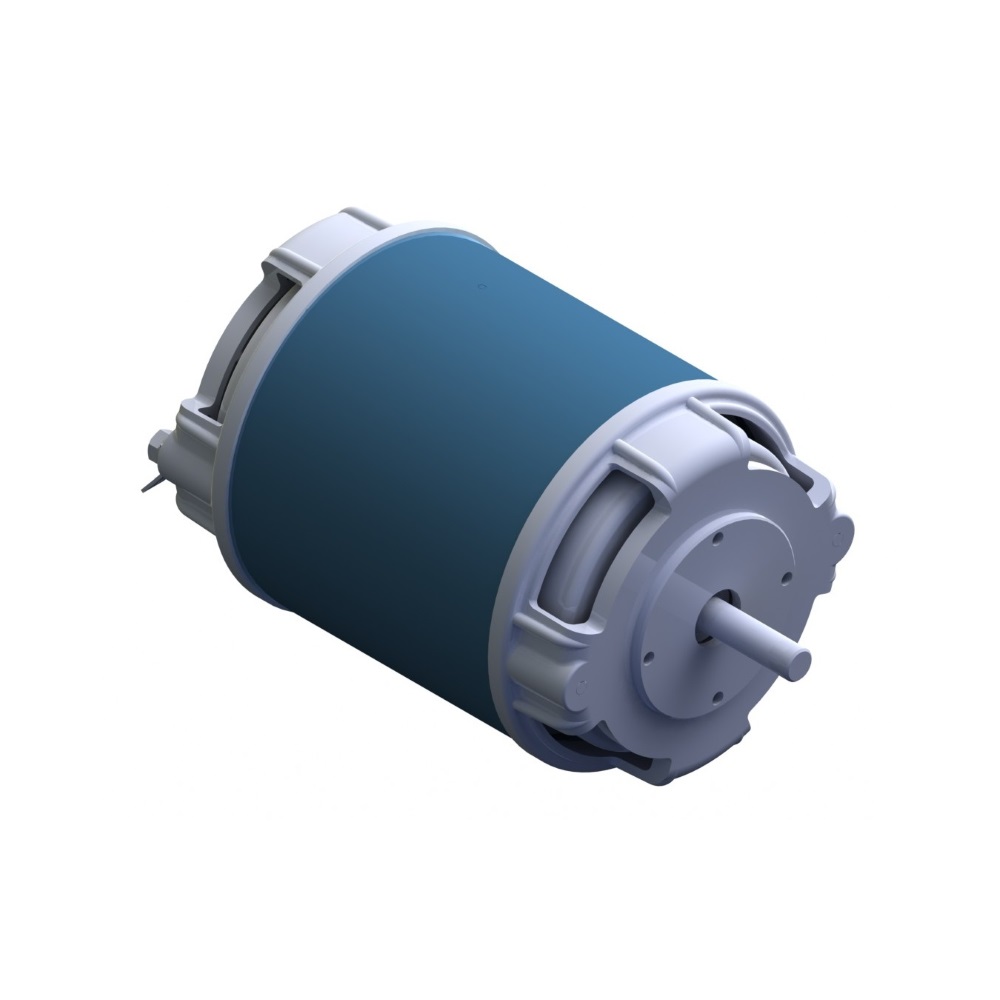
Эти двигатели также имеют короткозамкнутый ротор, а их применение гораздо шире, чем у однофазных. Здесь уже и стиральные машины, и различные станки. Двухфазные двигатели для питания от однофазных сетей называют конденсаторными двигателями, так как фазосдвигающий конденсатор является зачастую неотъемлемой их частью
Трехфазный асинхронный двигатель содержит на статоре три рабочие обмотки, сдвинутые относительно друг друга так, что при включении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве относительно друг друга на 120 градусов. При подключении трехфазного двигателя к трехфазной сети переменного тока, возникает вращающееся магнитное поле, приводящее в движение короткозамкнутый ротор.
Обмотки статора трехфазного двигателя можно соединить по схеме «звезда» или «треугольник», причем для питания двигателя по схеме «звезда» требуется напряжение выше, чем для схемы «треугольник», и на двигателе, поэтому, указываются два напряжения, например: 127/220 или 220/380. Трехфазные электродвигатели незаменимы для приведения в действие различных станков, лебедок, циркулярных пил, подъемных кранов, и т.д.
Трехфазные электродвигатели незаменимы для приведения в действие различных станков, лебедок, циркулярных пил, подъемных кранов, и т.д.
Трехфазный асинхронный двигатель с фазным ротором имеет статор аналогичный описанным выше типам электродвигателей, — шихтованный магнитопровод с тремя уложенными в его пазы обмотками, однако в фазный ротор не залиты алюминиевые стержни, а уложена уже полноценная трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически изолированных от него.
Посредством щеток, на кольца также подается трехфазное переменное напряжение, и подключение может быть осуществлено как напрямую, так и через реостаты. Безусловно, двигатели с фазным ротором стоят дороже, но их пусковой момент под нагрузкой значительно выше, чем у типов двигателей с короткозамкнутым ротором. Именно в силу повышенной мощности и большого пускового момента, этот тип двигателей нашел применение в приводах лифтов и подъемных кранов, то есть там, где устройство запускается под нагрузкой, а не вхолостую.
Именно в силу повышенной мощности и большого пускового момента, этот тип двигателей нашел применение в приводах лифтов и подъемных кранов, то есть там, где устройство запускается под нагрузкой, а не вхолостую.
Регуляторы хода для электродвигателей: виды и особенности
Во всех радиоуправляемых моделях c электродвигателями применяется устройство управляющее электромоторами. Для включения/выключения, а также для изменения оборотов необходим электронный регулятор хода.
Изначально существовали механические регуляторы, обладающие достаточно простой конструкцией, но тратящие слишком много энергии при работе, при этом обладая не очень хорошей надежностью. Современные электронные регуляторы хода лишены большинства недостатков механических аналогов.
Силовые электродвигатели бывают с коллектором и без. Соответственно, регуляторы хода можно разделить на два типа — для коллекторных двигателей и для бесколлекторных двигателей. Некоторые из регуляторов второго вида могут работать и с коллекторными моторами, но не наоборот.
Некоторые из регуляторов второго вида могут работать и с коллекторными моторами, но не наоборот.
Основные функции регуляторов
Во всех профессиональных моделях регуляторов кроме стандартных функций управления оборотами, могут присутствовать и дополнительные функции.
- Для радиоуправляемых авто и авиа моделей важно не только быстро набрать скорость, но и быстро убрать обороты двигателя, поэтому в регуляторах присутствует функция торможения, которое осуществляется путем замыкания обмоток двигателя через регулятор. Также многие регуляторы имеют возможность плавного торможения, что позволяет уменьшить нагрев регулятора и продлить срок службы коллектора электродвигателя.
- Для автомоделей важен задний ход, поэтому многие регуляторы позволяют менять направление вращения электродвигателя, подавая на него напряжение в обратной полярности. Чаще всего при работе в обратном направлении, на двигатель подается не полная мощность, т.
 к. она при этом просто не нужна.
к. она при этом просто не нужна. - Очень полезной является BEC-система применяемая в большинстве регуляторов для низковольтных моторов. Эта функция не имеет отношения к управлению двигателем, но позволяет не ставить на модель аккумулятор для системы радиоуправления, а использовать для этого силовой аккумулятор.
- В мощных регуляторах предназначенных для работы с повышенным напряжением (от 15 до 36 банок) встраивают гальваническую развязку силовых цепей от цепей приемника системы радиоуправления — опторазвязку. Это необходимо для того, чтобы мощные импульсные помехи из силовой части регулятора и двигателя не попали на высокочувствительные входные цепи приемника. При этом приемнику требуется отдельное питание от своего аккумулятора.
Дополнительные функции регуляторов
- Функция POR — сброс при включении. Является крайне полезной т.к. может спасти как саму модель, так и владельца от травм.
 При включении бортового питания модели ручка управления двигателем может быть не в положении Стоп. В этом случае двигатель модели может сразу набрать максимальные обороты. При использовании POR регулятор при подаче питания принудительно ставит двигатель в положение Стоп и выходит из него только после того, как ручка управления газом будет переведена в положение Стоп.
При включении бортового питания модели ручка управления двигателем может быть не в положении Стоп. В этом случае двигатель модели может сразу набрать максимальные обороты. При использовании POR регулятор при подаче питания принудительно ставит двигатель в положение Стоп и выходит из него только после того, как ручка управления газом будет переведена в положение Стоп. - Функция PCO (Power Cut Off) предназначена для отключения электродвигателя при падении напряжения аккумулятора ниже установленного значения. Эта функция поможет защитить аккумулятор от переразряда, но особенно она важна на летающих моделях с системой ВЕС. При разряде силового аккумулятора, модель ещё необходимо безопасно посадить. При использовании PCO ходовой двигатель отключиться, но в аккумуляторе ещё остается немного энергии для работы приемника и сервомашинок, что позволит посадить модель. При использовании этой функции очень важно выбрать регулятор рассчитанный именно на используемый тип аккумуляторов.
- Функция TOP (Thermal Overload Protection) предназначена для защита силовых ключей от токовой перегрузки, что может привести к тепловому разрушению MOSFET-транзисторов.
- Для защиты регулятора от перегрева применяется TP (Thermal Protection). В этом случае на плате устанавливается термодатчик, отключающий регулятор при его нагреве свыше допустимого уровня.
- RVP (Reverse Voltage Protection) это защита от переполюсовки питающего напряжения. Функция применяемая достаточно редко, т.к. она усложняет и удорожает регулятор, при этом ещё и ухудшая его рабочие параметры. Переплюсовка питания является одной из самых распространённых причин сгорания регуляторов, при этом, как правило, сгорают все силовые ключи. Но несмотря на это у RVP есть множество недостатков.
Характеристики регуляторов
У регуляторов хода есть свои характеристики, поэтому необходимо подбирать регулятор предназначенный для работы с выбранным электродвигателем и силовым аккумулятором. Существуют коллекторные и бесколлекторные электродвигатели, соответственно существуют и регуляторы предназначенные для разных видов двигателей. Важен тип аккумуляторов для работы с которыми предназначен данный регулятор. Существуют и универсальные модели регуляторов, в которых тип используемого аккумулятора меняется в настройках.
Существуют коллекторные и бесколлекторные электродвигатели, соответственно существуют и регуляторы предназначенные для разных видов двигателей. Важен тип аккумуляторов для работы с которыми предназначен данный регулятор. Существуют и универсальные модели регуляторов, в которых тип используемого аккумулятора меняется в настройках.
Значение максимального постоянного тока указывает какой максимальный ток двигателя сможет выдавать регулятор длительное время. По английски обозначается как Continuous Current. Но особенность обозначения в том, что часто указывается ток, который выдержат силовые ключи, но чаще всего его не выдержат провода или плата, поэтому важно помнить, что реальное значение в несколько раз ниже указанного.
Другое значение это максимальный пиковый ток – это ток, который кратковременно сможет выдерживать регулятор. Такие токи возникают, например, во время старта. При этом сейчас часто также указывается на сколько-витковые моторы рассчитан регулятор.
Максимальное рабочее напряжение. При слишком большом напряжении, регулятор просто сгорит. Иногда указывается не напряжение, а количество банок. В этом случае просто умножьте это количество на 1,2 Вольта.
Внутреннее сопротивление. Все схемы коммутации электроэнергии, применяемые в регуляторах, имеют определенные потери энергии, за счет внутреннего сопротивления. У регуляторов с реверсом это значение немного выше. Вообще внутреннее сопротивление современных регуляторов невелико, поэтому эти потери важны только при участии в серьезных соревнованиях.
Настройка регуляторов хода
Производители регуляторов хода стараются сделать их совместимыми с большинством моделей двигателей и передатчиков радиоуправления. Для этого в регулятор предусмотрена возможность регулировки некоторых параметров.
Часто есть возможность настройки положения джойстиков передатчика, соответствующие режимам нейтраль, тормоз, максимальный газ и реверс, при этом режимы тормоз и реверс могут быть отключены. Для настройки регулятора используются кнопки на корпусе регулятора. На некоторых моделях регуляторов для настройки применяются перемычки-джамперы. А в качестве индикатора настраиваемых режимов служат светодиоды на корпусе регулятора. Некоторые регуляторы позволяют изменять частоту импульсного регулирования при работе регулятора с разными двигателями. Причем частота может определяться отдельно для прямого хода и для торможения.
Для настройки регулятора используются кнопки на корпусе регулятора. На некоторых моделях регуляторов для настройки применяются перемычки-джамперы. А в качестве индикатора настраиваемых режимов служат светодиоды на корпусе регулятора. Некоторые регуляторы позволяют изменять частоту импульсного регулирования при работе регулятора с разными двигателями. Причем частота может определяться отдельно для прямого хода и для торможения.
В наиболее продвинутых моделях регуляторов хода для бессенсорных двигателей есть возможность изменения сдвига фаз (Timing) трехфазного тока относительно положения ротора. Это связано с особенностью работы бессенсорных регуляторов, у которых режимы наибольшей мощности и наивысшего КПД не совпадают, а настройка это параметра позволяет выбрать то, что важнее для данной модели.
Существуют и модели регуляторов предназначенные для определенных целей, например для автомоделей, судомоделей, или авиамоделей различающиеся набором функций.
Многофункциональные регуляторы при настройке в вертолетный режим, стабилизируют и регулируют не мощность, а обороты двигателя.
Подключения регуляторов хода
Регуляторы хода соединяются проводами с аккумулятором и электродвигателем. Проводам стоит уделить особое внимание. В качестве соединительных проводов лучше всего использовать гибкий медный многожильный провод. Провода нужны не обычные электротехнические, а специальные, с очень большим количеством очень тонких жил, такие например как применяемые для подключения акустических систем большой мощности. Рекомендуемые сечения проводов: 1 кв. мм. для токов до 20 ампер, 1,5 кв. мм. — для токов до 30 ампер, 2,5 кв. мм. — до 50 ампер и 4 кв. мм. — до 80 ампер. Использование проводов меньшего, чем необходимо сечения приведёт к снижению КПД или вообще к пожару, а применение большего, чем необходимо к неоправданному увеличению веса. При этом важно следить за изоляцией проводов, т.к. при работе модели они могут сильно греться. Длину проводов стоит выбирать минимально допустимую.
Длину проводов стоит выбирать минимально допустимую.
В профессиональных моделях провода между регулятором и двигателем припаиваются. В любительских моделях чаще всего применяются разъемы. Разъем между регулятором и аккумулятором должен быть рассчитан на огромные токи и обязательно иметь механическую защиту от переполюсовки.
Выключатель в силовые провода чаще всего не устанавливают, т.к.к все регуляторы хода рассчитаны на длительное подключение силовой части при обесточенной сигнальной. Большинство регуляторах с системой ВЕС имеют отдельный выключатель, который подает питание на приемник и сервомашинки.
Современные регуляторы имеют высокий КПД, но при больших нагрузках все же выделяется значительное количество тепла, которое нужно отвести, чтобы не спалить регулятор. Для этих целей многие регуляторы имеют небольшие радиаторы, иногда даже с электровентиляторами. Вообще размещение регулятора хода должно обеспечивать его обдув набегающим потоком воздуха, но очень часто это невозможно, т. к. необходимо защитить регулятор от влаги и грязи. Конечно существуют дорогие модели регуляторов защищенные от пыли и влаги. Другой вариант решения проблемы это использование регуляторов, рассчитанных на меньшее количество витков, чем в применяемом электродвигателе. Их КПД гораздо выше и они рассеивают меньше тепла.
к. необходимо защитить регулятор от влаги и грязи. Конечно существуют дорогие модели регуляторов защищенные от пыли и влаги. Другой вариант решения проблемы это использование регуляторов, рассчитанных на меньшее количество витков, чем в применяемом электродвигателе. Их КПД гораздо выше и они рассеивают меньше тепла.
Существуют радиоуправляемые модели с несколькими электродвигателями, в этом случае возможна как установка отдельного регулятора на каждый двигатель, так и использование одного сразу на несколько двигателей. При этом максимально допустимый продолжительный ток регулятора должен превышать суммарный потребляемый ток всех подключенных к нему электродвигателей. Двигатели желательно подключать к регулятору хода параллельно друг другу.
Для бесколлекторных двигателей с датчиками, необходимо устанавливать свой регулятор на каждый двигатель. Для безсенсорных электродвигателей возможно подключение к одному регулятору двух двигателей, но производители регуляторов считают такой режим нештатным, и не рекомендуют его использование. Также важно помнить, что недопустимо использование с одним регулятором хода двух жестко связанных бесколлекторных двигателей.
Также важно помнить, что недопустимо использование с одним регулятором хода двух жестко связанных бесколлекторных двигателей.
Ремонт регуляторов
Современные регуляторы хода часто стоят больших денег, при этом не редки случаи их частичного или полного выхода из строя. Ремонт регуляторов хода вполне возможен самостоятельно. Если плата не выгорела полностью, то вполне возможно заменить только сгоревшие компоненты сэкономив немалые средства.
Виды повреждений электродвигателей. Виды защиты от них
К повреждениям, возникающим в обмотке статора электродвигателей переменного тока, относятся многофазные короткие замыкания, однофазные замыкания на землю и замыкания между витками одной фазы (витковые замыкания).
Повреждениями синхронных электродвигателей и электродвигателей постоянного тока являются также обрывы в цепях возбуждения. Для синхронных электродвигателей представляют опасность замыкания на землю обмотки ротора.
Многофазные короткие замыкания всегда сопровождаются значительным возрастанием тока в поврежденном электродвигателе и понижением напряжения в питающей сети. Такие повреждения опасны не только для электродвигателя, но и для других неповрежденных электроприемников, поэтому на электродвигателях предусматривается быстродействующая защита от многофазных коротких замыканий в его обмотках и соединениях с коммутационным аппаратом, действующая на отключение.
Такие повреждения опасны не только для электродвигателя, но и для других неповрежденных электроприемников, поэтому на электродвигателях предусматривается быстродействующая защита от многофазных коротких замыканий в его обмотках и соединениях с коммутационным аппаратом, действующая на отключение.
Однофазное повреждение на землю в обмотке статора определяется режимом заземления нейтралей в питающей сети. Если нейтрали глухо заземлены, что обычно характерно для четырехпроводных сетей напряжением до 1 кВ, то ток однофазного короткого замыкания представляет опасность для поврежденного электродвигателя, поэтому и при таких повреждениях электродвигатель должен отключаться защитой без выдержки времени. Обычно это возлагается на защиту от многофазных коротких замыканий, выполняемой трехфазной. Специальную защиту от однофазных коротких замыканий на землю, как правило, не предусматривают.
В сетях с изолированными или заземленными через дугогасящие реакторы нейтралями однофазные замыкания на землю, как правило, непосредственной опасности для поврежденного электродвигателя и для системы электроснабжения в целом не представляют. Поэтому специальная защита от замыкания на землю, действующая на отключение, устанавливается на двигателях мощностью Рд≤2 МВт лишь в тех случаях, когда ток замыкания на землю Iз>=10 А. На электродвигателях мощностью Рд>2 МВт такая защита предусматривается при токах замыкания на землю I3≥5 А. Однако, по некоторым данным, ток замыкания на землю I3≥5 А представляет непосредственную опасность и для электродвигателей мощностью Рд≤2 МВт. Поэтому предлагается защиту электродвигателей независимо от их номинальной мощности выполнять одинаково. Опасность однофазных замыканий на землю заключается и в том, что они могут переходить в двойные замыкания на землю в разных точках. В этом случае значения токов повреждения могут достигать значения тока двухфазного к.з. Отключение электродвигателя при двойных замыканиях на землю возлагается обычно на защиту от замыкания на землю. Если она имеет выдержку времени, то в ее схему дополнительно вводят реле тока, срабатывающее при токах повреждения, равных 50—100 А, и отключающее электродвигатель без выдержки времени.
Поэтому специальная защита от замыкания на землю, действующая на отключение, устанавливается на двигателях мощностью Рд≤2 МВт лишь в тех случаях, когда ток замыкания на землю Iз>=10 А. На электродвигателях мощностью Рд>2 МВт такая защита предусматривается при токах замыкания на землю I3≥5 А. Однако, по некоторым данным, ток замыкания на землю I3≥5 А представляет непосредственную опасность и для электродвигателей мощностью Рд≤2 МВт. Поэтому предлагается защиту электродвигателей независимо от их номинальной мощности выполнять одинаково. Опасность однофазных замыканий на землю заключается и в том, что они могут переходить в двойные замыкания на землю в разных точках. В этом случае значения токов повреждения могут достигать значения тока двухфазного к.з. Отключение электродвигателя при двойных замыканиях на землю возлагается обычно на защиту от замыкания на землю. Если она имеет выдержку времени, то в ее схему дополнительно вводят реле тока, срабатывающее при токах повреждения, равных 50—100 А, и отключающее электродвигатель без выдержки времени.
Витковые замыкания в обмотке опасны для электродвигателя в связи с тем, что наведенные в замкнувшихся витках токи могут намного превышать номинальный ток. При этом из-за теплоты, выделяемой в замкнувшихся витках, происходит повышенный нагрев магнитопровода и неповрежденной части обмотки и, как следствие, дальнейшее разрушение изоляции. Ток в неповрежденной части обмотки при витковых замыканиях изменяется незначительно, поэтому защиты, включенные на полные токи фаз, не могут использоваться для действия при таких повреждениях. Для этого в случае необходимости рекомендуется применять фильтровую токовую защиту. Имеются и другие предложения. В частности, информацией о витковых замыканиях может служить фазовый сдвиг между токами электродвигателя. На этой основе разработано импульсное устройство защиты, измеряющее интервал между импульсами, сформированными в момент перехода токов через нулевое значение. Защита действует также при несимметричных к.з.
Обрывы в цепях возбуждения синхронных электродвигателей происходят очень редко, поэтому защита от этих повреждений предусматривается только для некоторых мощных электродвигателей. Более вероятен обрыв в цепях возбуждения двигателей постоянного тока. При обрыве цепи возбуждения электродвигатель или тормозится (если на валу есть нагрузка), или чрезмерно повышает частоту вращения (незагруженный электродвигатель с независимым возбуждением или с параллельным самовозбуждением). И то, и другое нежелательно, так как при торможении значительна, возрастает ток якоря, а работа с чрезмерной скоростью может привести к разрушению электродвигателя. Поэтому электродвигатели постоянного тока средней и большой мощности снабжаются защитой от обрыва цепи возбуждения.
Более вероятен обрыв в цепях возбуждения двигателей постоянного тока. При обрыве цепи возбуждения электродвигатель или тормозится (если на валу есть нагрузка), или чрезмерно повышает частоту вращения (незагруженный электродвигатель с независимым возбуждением или с параллельным самовозбуждением). И то, и другое нежелательно, так как при торможении значительна, возрастает ток якоря, а работа с чрезмерной скоростью может привести к разрушению электродвигателя. Поэтому электродвигатели постоянного тока средней и большой мощности снабжаются защитой от обрыва цепи возбуждения.
Замыкания на землю обмотки ротора. Как и для турбогенераторов, опасно замыкание на землю во второй точке обмотки возбуждения синхронного электродвигателя. Его защита от этого вида повреждения может быть выполнена аналогично защите турбогенератора. Однако в соответствии с «Правилами устройства электроустановок» такая защита необязательна.
Виды электродвигателей и немного истории электричества
Виды электродвигателей и немного истории электричества
История открытия электричества очень долгая и тернистая.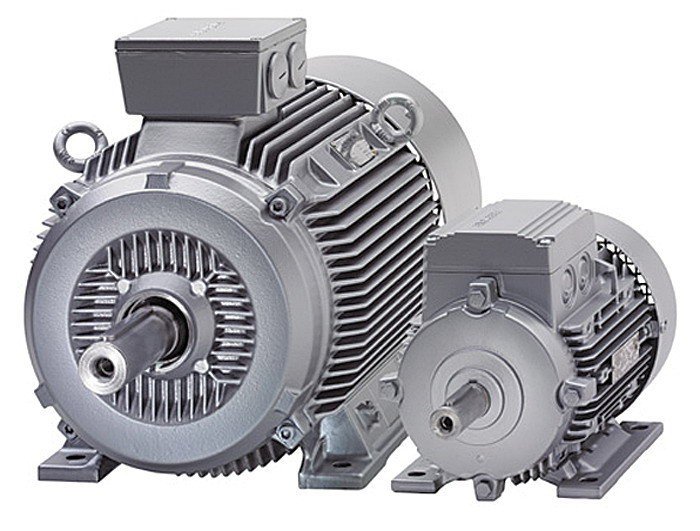 Все знают, что электродвигатель изобрел Борис Якоби в 20х годах 19 века, но кто открыл само электричество? О свойствах некоторых материалов электризоваться — притягивать легкие предметы знали древние греки, они заметили что таким свойством обладает прежде всего янтарь, на древнегреческом он звучал как электрон и дал название этой отрицательно заряженной частице.
Все знают, что электродвигатель изобрел Борис Якоби в 20х годах 19 века, но кто открыл само электричество? О свойствах некоторых материалов электризоваться — притягивать легкие предметы знали древние греки, они заметили что таким свойством обладает прежде всего янтарь, на древнегреческом он звучал как электрон и дал название этой отрицательно заряженной частице.
Но, как известно, знания древних греков до новейшего времени не дошли, поэтому фактически до 16-17 века никакой информации об электричестве не было, лишь в конце 16 века физик (а по совместительству и придворный врач английской королевы Елизаветы) Уильям Гилберт заметил, что способностью притягивать мелкие частицы обладает не один янтарь, но и другие материалы и камни — хрусталь, алмаз, аметист и прочие, а также заметил также что огонь уничтожает эти магнитные свойства, также Гилберт исследовал свойства и полюса магнита, железа, заметил природный магнетизм Земли, в общем сделал первые шаги в развитии такой непростой науки электричества, за век до широко известного Луиджи Гальвани.
Неравномерное распределение электрических зарядов, вызванное каким либо образом, дает значительную потенциальную электростатическую энергию. Её возможно накапливать, для этого используют конденсатор, система состоящая из группы проводников, разъединенных диэлектриками (непроводниками), небольшой толщины, обладающими большей емкостью. И таким образом, емкость конденсатора пропорциональна толщине диэлектрика (чем она меньше, тем емкость больше) или диэлектриком могут выступать различные вещества с большим сопротивлением ( от 10+8 Ом).
Теперь о двигателях, наиболее распространенный тип — асинхронный трехфазный электродвигатель, именно он используется в подавляющем большинстве оборудования и станков. в бытовой технике чаще всего используют однофазные. Ключевые детали электромотора — статор и ротор, ротор вращается и образует магнитное поле опеределенной силы, причем скорость движения магнитного поля несколько запаздывает по сравнению с движением ротора, он замедляется или наоборот, увеличивает скорость вращения.
Важной деталью мотора является вал ротора, от качества его обработки зависит равномерность воздушного зазора между ним и статором и влияет на точность работы. Ротор вращается со скоростью не равной скорости магнитного потока таким образов, регулируя толщину и количество обмотор регулируется и мощность двигателя, в обмотках протекает переменный синусоидальный ток. Применяется там где не нужна постоянная скорость двигателя, и незначительные погрешности и колебания движения для оборудования вполне допустимы, кроме того обычно для понижения скорости вращения на выходном валу и увеличение пускового момента, используется редуктор.
Мы предлагаем широчайший ассортимент электромоторов. Двигатели асинхронные переменного тока, трехфазные и однофазные, с тормозом, защитным реле, многоскоростные, с возможностью переключения полюсов. Различной мощности, возможны индивидуальные заказы, другие габаритные размеры и фланцы. Мощностью в данном случае принято называть, количество механической энергии, которую этот двигатель вырабатывает.
Приводной механизм с электрическим двигателем называется соответственно электропривод двигателя постоянного тока вращается постоянный магнит или якорь другой конструкции, питание на обмотки подается через щетки (щеточно-коллекторный узел), обмотки при этом находятся на самом роторе, а не во вне, как у двигателя переменного тока.
Свое необычное название щетки приобрели от первых конструкций двигателей, где они, состоящие из множества проволочем напоминали щетку. Сейчас они обычно изготавливаются из графитовых брусков или других, проводящих ток, материалов с маленьким сопротивлением.
Существует также еще и асинхронный двухфазный двигатель, он содержит две обмотки сдвинутыми на 90 градусов и полый ротор типа беличье колесо (или короткозамкнутый), он редко используется в промышленности, но его можно встретить в приборостроении, например он приводит в движение кулер в компьютере.
Кроме асинхронного бывает синхронный двигатель он отличается тем, что у первого скорость и частота движения ротора и магнитного поля равны, то есть вращаются синхронно, конечно, можно сделать опережение по фазе, но эти частности к теме не относится).
Трубопроводная арматура — конденсатоотводчики — электроприводы — КИПиА — теплообменники — соленоидные клапаны — расширительные баки — теплоавтоматика — насосы — котлы отопления — радиаторы — водонагреватели — тепловые пункты
Типы электродвигателей
Электродвигатели теперь более разнообразны и адаптируемы, чем когда-либо прежде. При планировании системы управления движением чрезвычайно важен выбор двигателя. Двигатель должен соответствовать назначению и общим рабочим характеристикам системы. К счастью, существует конструкция двигателя, подходящая для любых мыслимых целей.
К наиболее распространенным электродвигателям, используемым сегодня, относятся:
Бесщеточные двигатели переменного тока
Бесщеточные двигатели переменного тока являются одними из самых популярных в управлении движением. Они используют индукцию вращающегося магнитного поля, генерируемого в статоре, для вращения как статора, так и ротора с синхронной скоростью. Для работы они полагаются на постоянные электромагниты.
Они используют индукцию вращающегося магнитного поля, генерируемого в статоре, для вращения как статора, так и ротора с синхронной скоростью. Для работы они полагаются на постоянные электромагниты.
Щеточные двигатели постоянного тока
В щеточном двигателе постоянного тока ориентация щетки на статоре определяет ток. В некоторых моделях решающее значение имеет ориентация щетки относительно сегментов стержня ротора. Коммутатор особенно важен в любой конструкции щеточного двигателя постоянного тока.
Бесщеточные двигатели постоянного тока
Бесщеточные двигатели постоянного тока были впервые разработаны для достижения более высоких характеристик в меньшем пространстве, чем щеточные двигатели постоянного тока, и они меньше, чем сопоставимые модели переменного тока.Встроенный контроллер используется для облегчения работы при отсутствии контактного кольца или коммутатора.
Прямой привод
Прямой привод — это высокоэффективная технология с низким уровнем износа, которая заменяет обычные серводвигатели и сопутствующие им трансмиссии. Эти двигатели не только намного легче обслуживать в течение длительного периода времени, но и ускоряются быстрее.
Линейные двигатели
Эти электродвигатели имеют раскрученный статор и двигатель, создающий линейную силу по длине устройства.В отличие от цилиндрических моделей, они имеют плоскую активную секцию с двумя торцами. Как правило, они быстрее и точнее вращающихся двигателей.
Серводвигатели
Серводвигатель — это любой двигатель, соединенный с датчиком обратной связи для облегчения позиционирования; Таким образом, серводвигатели являются основой робототехники. Используются как поворотные, так и линейные приводы. Недорогие щеточные двигатели постоянного тока широко распространены, но их заменяют бесщеточные двигатели переменного тока для высокопроизводительных приложений.
Недорогие щеточные двигатели постоянного тока широко распространены, но их заменяют бесщеточные двигатели переменного тока для высокопроизводительных приложений.
Шаговые двигатели
В шаговых двигателяхиспользуется внутренний ротор, управляемый электроникой с помощью внешних магнитов.Ротор может быть изготовлен на постоянных магнитах или из мягкого металла. Когда обмотки находятся под напряжением, зубья ротора выравниваются по магнитному полю. Это позволяет им перемещаться от точки к точке с фиксированным шагом.
Перед тем, как начать работу над какой-либо новой системой, тщательно подумайте о конкурирующих свойствах различных двигателей. Выбор правильного двигателя позволяет лучше начать любой проект.
Готовы узнать больше? Ознакомьтесь с курсом «Основы проектирования электродвигателей», предлагаемым колледжем движения и моторизации MCMA.
Типы электродвигателей и их использование
Знание о различных типах электродвигателей всегда полезно из-за широкого использования двигателей от бытовых до промышленных. Если у вас есть система кондиционирования воздуха дома или вы используете воздушный компрессор на промышленном предприятии, вы используете электродвигатели. Таким образом, если вы знаете о различных типах электродвигателей, вы сможете лучше понять систему, которой владеете, и лучше контролировать ее работу.
Здесь, в Linquip, мы предоставили вам удобную платформу, чтобы вы могли найти тип электродвигателя, который вам нужен для вашего приложения. Кроме того, в этом посте мы пытаемся демистифицировать различные типы электродвигателей для вашей справки. Итак, следите за обновлениями!
Что такое электродвигатели?
Прежде чем узнать о различных типах электродвигателей, лучше начать с вопроса «что такое электродвигатель»? Что ж, самый короткий ответ заключается в том, что электродвигатель или просто двигатель — это электромеханическое устройство, которое получает электрическую энергию и преобразует ее в движение или механическую энергию.
Это движение в основном имеет вращательную форму. Поток электрического тока индуцирует магнитное поле, и в электродвигателе возникает вращательное движение, перпендикулярное направлению тока и магнитного поля.
Применение электродвигателей
Электродвигатели могут использоваться в домашних условиях, например, в таких электроприборах, как кондиционеры, пылесосы, вентиляторы, кухонные комбайны и т. Д.все они по-своему используют вращательную силу электродвигателей или даже в игрушках, таких как игрушечные машинки или модели самолетов с дистанционным управлением или с помощью приложений.
Говоря об электрических моделях транспортных средств, более крупные и сложные версии электродвигателей можно найти в электромобилях и самолетах реальных размеров (ну, эти самолеты все еще изучаются, чтобы стать коммерчески доступными).
И последнее, но не менее важное: некоторые типы электродвигателей широко используются в промышленности, например, в промышленных газовых компрессорах, насосах, подъемных транспортных средствах, смесителях и т. Д.
Д.
Способы классификации электродвигателей
Различные типы электродвигателей можно классифицировать по-разному. Один из способов классификации основан на их вольерах. У нас есть двигатели с защитой от капель (ODP), подходящие для чистых, сухих и закрытых помещений, улучшенной версией которых являются двигатели с защитой от атмосферных воздействий с конфигурацией корпуса WP1 или WP2. У нас также есть полностью закрытые корпуса с вентиляторным охлаждением (TEFC), полностью закрытые воздушные клапаны (TEAO), полностью закрытые с принудительной вентиляцией (TEFV) и полностью закрытые невентилируемые корпуса (TENV) для различных типов электродвигателей.Существуют также взрывозащищенные (Ex) двигатели, используемые во взрывоопасных зонах с возможностью взрыва из-за присутствия в этой зоне некоторых взрывоопасных жидкостей, пыли и т. Д.
Тем не менее, электродвигатели обычно классифицируют по источнику питания. Существуют двигатели переменного тока или двигатели переменного тока, в которых ток меняет направление с некоторой частотой. Существуют также двигатели постоянного или постоянного тока, которые широко используются в небольших приложениях из-за их легкого регулирования скорости.
Существуют также двигатели постоянного или постоянного тока, которые широко используются в небольших приложениях из-за их легкого регулирования скорости.
Двигатели переменного тока подразделяются на однофазные и трехфазные.Однофазный двигатель может достигать мощности около 3 кВт при питании от однофазного источника питания, что характерно для бытовых и коммерческих приложений. С другой стороны, трехфазный двигатель может производить мощность до 300 кВт. Эти двигатели — идеальный выбор для промышленного применения.
Двигатели переменного тока
Как упоминалось ранее, двигатель переменного тока является одним из типов электродвигателей, в которых используется ток переменного направления. Эти двигатели не так легко регулируются по скорости, как двигатели постоянного тока; однако, с небольшими потерями в мощности, можно использовать двигатели переменного тока с частотно-регулируемыми приводами, чтобы лучше регулировать скорость.
Существует два широко используемых типа двигателей переменного тока и еще один менее распространенный тип:
- Асинхронные двигатели
Асинхронный или асинхронный двигатель — это механизм, который никогда не работает с синхронной скоростью. Этот двигатель преобразует электрическую энергию в механическую, используя явление электромагнитной индукции. В этих типах электродвигателей магнитное поле вращается в статорах, которые индуцируют ток в роторе, что приводит к вращению двигателя.Поскольку вращение ротора вызывается внешним магнитным полем, эти двигатели возбуждаются извне. Существует два типа асинхронных двигателей в зависимости от конструкции ротора: асинхронные двигатели с короткозамкнутым ротором и асинхронные двигатели с фазной обмоткой.
Этот двигатель преобразует электрическую энергию в механическую, используя явление электромагнитной индукции. В этих типах электродвигателей магнитное поле вращается в статорах, которые индуцируют ток в роторе, что приводит к вращению двигателя.Поскольку вращение ротора вызывается внешним магнитным полем, эти двигатели возбуждаются извне. Существует два типа асинхронных двигателей в зависимости от конструкции ротора: асинхронные двигатели с короткозамкнутым ротором и асинхронные двигатели с фазной обмоткой.
В синхронных типах электродвигателей происходит прямое приложение магнитного поля к обмоткам ротора, что имеет свои недостатки и преимущества. Такие двигатели с внутренним возбуждением требуют иных требований к защите и управлению, чем асинхронные двигатели.
Существуют также линейные типы электродвигателей, в которых статор и ротор не катятся, и поэтому они создают линейную силу вместо крутящего момента. Этот тип двигателя обычно используется в раздвижных дверях и приводах.
Асинхронный двигатель
Асинхронный двигатель — это один из типов электродвигателей Elector, который, вероятно, наиболее широко используется в промышленности. Статор намагничивается из-за его подключения к электросети, затем магнитное поле индуцирует напряжение и, следовательно, ток в обмотках ротора, затем индуцированный ток в роторе создает другое магнитное поле, а затем взаимодействие между этими двумя магнитными полями. создает вращающую силу или крутящий момент, приводящий в движение вал двигателя.
Эти двигатели имеют очень простую конструкцию, прочную конструкцию, низкую цену и простоту обслуживания. Они также имеют широкий диапазон номинальной мощности, как уже было сказано, наиболее широко используемые типы электродвигателей. Тем не менее, регулирование скорости непросто без частотно-регулируемого привода, который заставляет двигатель работать с запаздывающим коэффициентом мощности.
Асинхронный двигатель выпускается двух различных типов: с короткозамкнутым ротором, , асинхронный двигатель с фазным ротором, , асинхронный двигатель с фазным ротором, , как упоминалось ранее.
Двигатель с фазным ротором или электродвигатель с контактным кольцом имеет большее количество витков обмотки, что означает, что он имеет более высокое наведенное напряжение и снижает ток, чем асинхронный электродвигатель с короткозамкнутым ротором.Они также могли производить больший пусковой крутящий момент. С другой стороны, их сложнее производить из-за добавленного количества компонентов по сравнению с асинхронными двигателями с короткозамкнутым ротором, что значительно увеличивает их удельную стоимость, а также затраты на их обслуживание.
- Ротор с короткозамкнутым ротором Асинхронный двигатель изготовлен из параллельно расположенных токопроводящих шин, закороченных на обоих концах закорачивающими кольцами.

- Однофазные асинхронные двигатели с короткозамкнутым ротором имеют одну обмотку статора, и всегда есть какое-то другое устройство, запускающее двигатель.Они идеально подходят для приложений, требующих всего несколько лошадиных сил, например, для бытовой техники. До сих пор они были наиболее широко используемыми для бытовой техники.
- Трехфазные асинхронные двигатели с короткозамкнутым ротором могут работать с высокими требованиями к мощности; их номинальная мощность может варьироваться от очень небольшой до сотен лошадиных сил. Они тоже самозапускаются. Почти 90% трехфазных асинхронных двигателей, используемых в промышленности, таких как насосы, компрессоры и вентиляторы, относятся к типу с короткозамкнутым ротором.
- Ротор Асинхронный двигатель имеет распределенную обмотку, состоящую из двух слоев. Причина названия в том, что ротор этих типов электродвигателей намотан на столько же полюсов, сколько и статор.
 Из-за более высокой стоимости двигатели с фазным ротором рассматриваются в ситуациях, когда требуется высокий пусковой момент.
Из-за более высокой стоимости двигатели с фазным ротором рассматриваются в ситуациях, когда требуется высокий пусковой момент.- Однофазные двигатели с фазным ротором подходят для более высоких номинальных мощностей, чем их аналоги с короткозамкнутым ротором.Они могут довольно комфортно стартовать и могут очень хорошо разгоняться. Некоторые машины, превышающие размеры бытовой техники, могут использовать эти типы электродвигателей, например, в сельском хозяйстве, небольших воздушных компрессорах, горнодобывающей промышленности и т.д. моторы используются в промышленности, но имеют хорошие характеристики своих братьев с короткозамкнутым ротором.
см. Здесь видео о том, как работает асинхронный двигатель.
Синхронные двигатели
В отличие от асинхронных двигателей, синхронные двигатели в основном не самозапускаются, несмотря на некоторые самовозбуждающие конфигурации, которые можно найти для некоторых небольших приложений. Создание магнитного поля ротора для этих типов электродвигателей не зависит от тока, а скорость вращения синхронного двигателя привязана к частоте сети. Другими словами, вращение вала синхронных электродвигателей происходит с синхронизацией скорости с частотой питающего тока.
Создание магнитного поля ротора для этих типов электродвигателей не зависит от тока, а скорость вращения синхронного двигателя привязана к частоте сети. Другими словами, вращение вала синхронных электродвигателей происходит с синхронизацией скорости с частотой питающего тока.
Что делает их интересными для промышленных предприятий с более высокими требованиями к мощности, так это их высокая эффективность преобразования переменного тока в работу и их способность корректировать коэффициент мощности. Это означает, что они могут работать при единичном коэффициенте мощности, что предполагает равную активную мощность нагрузки с полной мощностью цепи.
Синхронные двигатели переменного тока бывают двух типов: без возбуждения и с возбуждением постоянным током. Синхронные электродвигатели без возбуждения подразделяются на три категории: с постоянным магнитом, реактивным сопротивлением и гистерезисным типом.
Синхронные двигатели без возбуждения
Электродвигатели синхронного типа без возбуждения спроектированы таким образом, чтобы их ротор следовал за синхронизированным вращающимся полем на разных этапах, что создавало бы постоянное поле. Когда ротор синхронных двигателей без возбуждения вращается, он взаимодействует со статором. Взаимодействие между полюсами поля статора и ротором приводит к тому, что ротор становится электромагнитным с северным и южным полюсами. Ротор этих типов электродвигателей обладает высокой удерживающей способностью, что означает, что он обладает высокой способностью удерживать или сопротивляться намагничиванию.
Когда ротор синхронных двигателей без возбуждения вращается, он взаимодействует со статором. Взаимодействие между полюсами поля статора и ротором приводит к тому, что ротор становится электромагнитным с северным и южным полюсами. Ротор этих типов электродвигателей обладает высокой удерживающей способностью, что означает, что он обладает высокой способностью удерживать или сопротивляться намагничиванию.
Как уже упоминалось, существует три типа синхронных двигателей без возбуждения, а именно синхронные двигатели с постоянным магнитом, реактивные и гистерезисные синхронные двигатели. Давайте обсудим их далее.
Постоянный магнит
В синхронных типах электродвигателей с постоянными магнитами стальной ротор прикреплен к постоянному магниту, например неодимовому магниту, который обеспечивает непрерывное непрерывное магнитное поле. Это реализуется посредством взаимодействия ротора с вращающимся полем, создаваемым статором, к которому подключен источник переменного тока. Постоянная часть ротора привязана к вращающемуся полю статора, что обеспечивает синхронную скорость вращения ротора. Эта конструкция похожа на бесщеточные двигатели постоянного тока, которые будут рассмотрены позже.
Постоянная часть ротора привязана к вращающемуся полю статора, что обеспечивает синхронную скорость вращения ротора. Эта конструкция похожа на бесщеточные двигатели постоянного тока, которые будут рассмотрены позже.
Для запуска этих типов электродвигателей необходим источник переменной частоты, поскольку ротор в этой конструкции представляет собой постоянный магнит, создающий постоянное магнитное поле. Управление скоростью осуществляется с использованием прямого управления крутящим моментом и управления с ориентацией на поле.
Сопротивление
Ротор для реактивных синхронных электродвигателей, не имеющих обмоток, изготовлен из ферромагнитного материала, на котором индуцируются непостоянные магнитные полюса. Причина названия в том, что он генерирует крутящий момент, используя магнитное сопротивление, то есть которое является мерой сопротивления или сопротивления материала магнитному потоку.
Изображение предоставлено ABB Group Число полюсов ротора реактивных синхронных двигателей равно числу полюсов статора. Число полюсов всегда четное и обычно равно четырем или шести. Однако количество полюсов ротора меньше, чем количество полюсов статора, чтобы предотвратить пульсации крутящего момента. Пульсация крутящего момента — это периодическое увеличение и уменьшение крутящего момента, создаваемого валом двигателя, что не очень хорошо.
Число полюсов всегда четное и обычно равно четырем или шести. Однако количество полюсов ротора меньше, чем количество полюсов статора, чтобы предотвратить пульсации крутящего момента. Пульсация крутящего момента — это периодическое увеличение и уменьшение крутящего момента, создаваемого валом двигателя, что не очень хорошо.
Когда ротор статора находится под напряжением, на ротор действует крутящий момент в направлении уменьшения магнитного сопротивления. Этот крутящий момент будет тянуть ближайший к ротору усилие, так что он будет выровнен с полем статора в положение с меньшим сопротивлением.Следовательно, чтобы поддерживать вращение, полюс статора должен постоянно выходить из полюса ротора, вращаясь впереди полюсов ротора.
Гистерезис
В синхронных двигателях с гистерезисом при вращении магнитного поля статора на ротор действует реверсивное магнитное поле. Причина этого явления в том, что цилиндрический ротор этих типов электродвигателей изготовлен из материала с высокой коэрцитивной силой.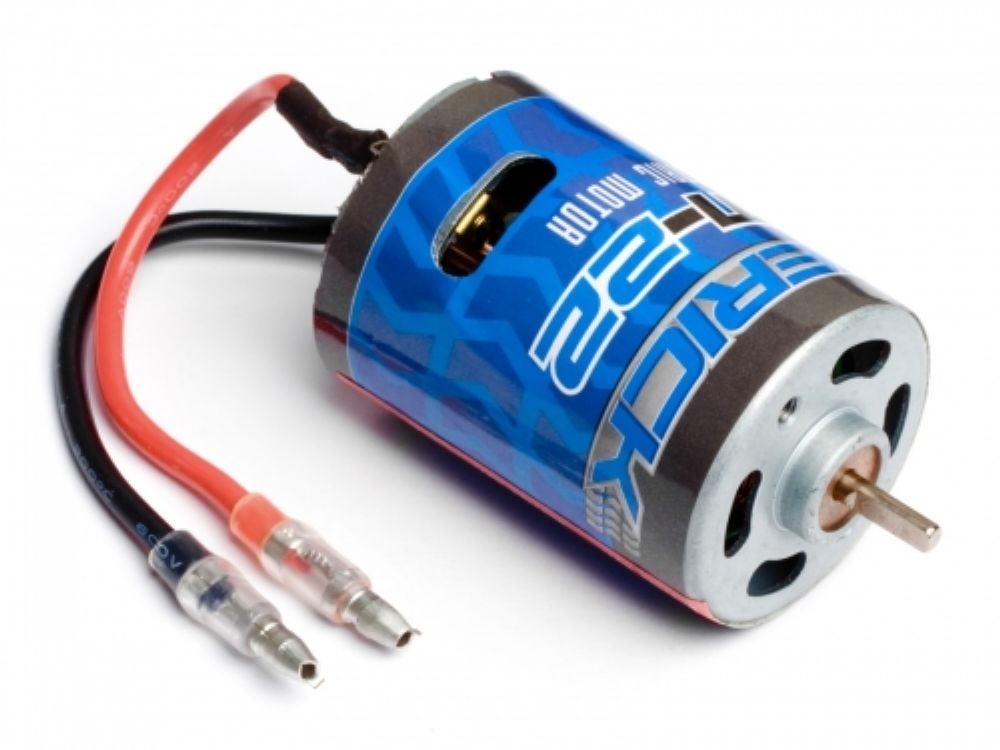 Это означает, что, как только ротор намагничен в каком-либо направлении, вы не сможете легко изменить его направление без приложения большого обратного магнитного поля.
Это означает, что, как только ротор намагничен в каком-либо направлении, вы не сможете легко изменить его направление без приложения большого обратного магнитного поля.
Обратное магнитное поле, испытываемое каждым небольшим объемом ротора из-за вращения магнитного поля статора, будет продолжаться до тех пор, пока не будет достигнута синхронная скорость. Это дает нам преимущество синхронных двигателей с гистерезисом, которые могут создавать постоянный крутящий момент до достижения синхронной скорости без пульсаций крутящего момента. Еще один момент, связанный с этими типами двигателей, заключается в том, что, несмотря на то, что обычно имеется короткозамкнутая обмотка для запуска двигателя, двигатель может запускаться самостоятельно из-за того, что движение ротора зависит только от фазовой задержки между статором и магнитным полем ротора. поля.
Синхронные двигатели с возбуждением постоянным током
Ротор этих типов электродвигателей возбуждается с помощью внешнего источника постоянного тока, который создает магнитный поток, необходимый для приведения ротора в движение. Это можно сделать с помощью отдельного источника постоянного тока или источника, напрямую подключенного к валу двигателя.
Это можно сделать с помощью отдельного источника постоянного тока или источника, напрямую подключенного к валу двигателя.
Вы можете посмотреть видео здесь, чтобы увидеть, как работают синхронные двигатели.
Линейные
Линейные двигатели — это один из типов электродвигателей переменного тока, создающих линейную силу вместо крутящего момента.Они похожи на те, что уже обсуждались ранее, за исключением того, что их роторы и статоры развернуты. Они широко используются в таких приложениях, как электропоезда, приводы, используемые в раздвижных дверях и т. Д.
Это видео покажет вам, как работают такие двигатели.
Двигатели постоянного тока
В электродвигателях постоянного тока электрическая энергия постоянного тока преобразуется в механическую. Двигатели постоянного тока могут быть с самовозбуждением или с независимым возбуждением. Однако двигатели постоянного тока с самовозбуждением, вероятно, более интересны, если вы можете использовать их в своих приложениях. Электродвигатели постоянного тока
Электродвигатели постоянного тока
также можно классифицировать в зависимости от того, являются ли они щеточными двигателями постоянного тока (BDC) или бесщеточными двигателями постоянного тока (BLDC). Щеточные двигатели постоянного тока дешевы и просты в разработке и производстве; однако двигатели BLDC сложны и дороги. В целом, небольшие и малочувствительные приложения, такие как электроприборы и автомобильные электрические стеклоподъемники и сиденья, могут использовать двигатели BDC, тогда как приложения, такие как HVAC и охлаждение, автомобильные электродвигатели и другие подобные промышленные системы, будут работать с BLDC.
Щеточный DC
Щеточные электродвигатели постоянного тока имеют внутреннюю коммутацию, что означает, что крутящий момент создается непосредственно из мощности постоянного тока, подаваемой с помощью стационарных постоянных магнитов или электромагнитов и вращающихся электромагнитов.
Достаточно недорогие и очень надежные. Вы можете легко контролировать их скорость, используя простую двухпроводную систему, хотя есть некоторые конструкции с фиксированной скоростью, для которых нет управления скоростью.
У щеточных электродвигателей постоянного тока также могут быть некоторые недостатки, такие как необходимость периодического технического обслуживания, обусловленного специально щетками, и малый срок службы для сложных работ, для которых высоки крутящий момент или скорость. Другой важной проблемой является их ограниченная скорость из-за щеток и генерации электромагнитных помех (EMI) из-за искрения щеток.
Изображение с двигателя ZGCШунтирующая обмотка
Катушки возбуждения или обмотки электродвигателей постоянного тока с шунтирующей обмоткой и щеткой подключены параллельно якорю; отсюда и название этих типов электродвигателей. В этой конфигурации обмоток подаваемый ток будет распределяться между шунтирующим якорем и обмотками возбуждения. С двигателями BDC с параллельной обмоткой регулировать скорость очень просто.
Когда нагрузка прикладывается к электродвигателям постоянного тока с шунтирующей обмоткой и щеточным электродам, скорость имеет тенденцию к снижению, но в этой ситуации сетевое напряжение будет увеличиваться. Когда сетевое напряжение увеличивается, ток якоря увеличивается, а это означает, что будет генерироваться некоторый дополнительный крутящий момент, который компенсирует снижение скорости из-за приложения нагрузки, что делает эти типы электродвигателей устройствами с постоянной скоростью.
Когда сетевое напряжение увеличивается, ток якоря увеличивается, а это означает, что будет генерироваться некоторый дополнительный крутящий момент, который компенсирует снижение скорости из-за приложения нагрузки, что делает эти типы электродвигателей устройствами с постоянной скоростью.
Все это означает, что вы, вероятно, захотите рассмотреть такой двигатель, если бы у вас были низкие требования к пусковому крутящему моменту, а также хорошее регулирование скорости.
Последовательная обмотка
Если вместо параллельного соединения обмоток якоря и обмоток возбуждения последовательно, а не параллельно, получится щеточный электродвигатель постоянного тока с последовательной обмоткой.Понятно, что ток в обмотках возбуждения и якоря для этой конструкции будет одинаковым. Им потребуется значительный ток, но крутящий момент, который они создают, очень высок, особенно при запуске.
Однако эта конструкция не очень хороша с регулированием скорости. Причина в том, что, несмотря на повышенное напряжение из-за нагрузки, двигатель будет увеличивать ток для нарастания, но магнитное поле в конечном итоге станет насыщенным, что означает, что магнитный поток между якорем и статором не будет расти достаточно быстро, что означает недостаточный крутящий момент. будет сгенерирован, чтобы вернуть скорость к предыдущим условиям.
будет сгенерирован, чтобы вернуть скорость к предыдущим условиям.
Можно сказать, что вы могли бы рассмотреть типы электродвигателей, когда вам нужен высокий пусковой крутящий момент, но не слишком заботитесь о регулировании скорости.
Составная обмотка
Что делать, если вам нужен НМТ с высоким пусковым моментом, а также с хорошим контролем скорости? Что ж, для этого тоже есть решение: электродвигатели постоянного тока с комбинированной обмоткой и щеткой. Двигатели с комбинированной обмоткой — это «гибрид» двигателей постоянного тока с шунтирующей обмоткой и щеточных двигателей с последовательной обмоткой. В этих типах электродвигателей имеется обмотка возбуждения, включенная последовательно с обмоткой якоря, и еще одна обмотка возбуждения, шунтирующая с обмоткой якоря.
Существует конфигурация с коротким шунтом и конфигурация с длинным шунтом для двигателей BDC с комбинированной обмоткой. Если бы поле шунта было только параллельно якорю, это была бы конфигурация короткого шунта, но если бы поле шунта было параллельно ряду якоря и последовательному полю, это был бы BDF с составной обмоткой с длинным шунтом.
У вас может быть полярность шунтирующего поля, совпадающая с полярностью последовательного поля, что создает кумулятивную составную обмотку BDC. Это двигатель с высоким пусковым моментом и хорошей регулировкой скорости.У вас также может быть полярность шунтирующего поля, противоположная последовательному полю, что делает дифференциальный двигатель с составной обмоткой.
Постоянный магнит
В щеточном двигателе постоянного тока с постоянными магнитами якорь окружен постоянными магнитами, прикрепленными к внутренней поверхности цилиндрического статора этих типов электродвигателей. Магниты установлены таким образом, чтобы противоположные полюса соседних магнитов были обращены к якорю. Якорь, который является проводником с током, поэтому будет испытывать механическую силу, действующую на него со стороны магнитного поля этой системы постоянных магнитов, и будет вращаться в его направлении.
Серводвигатель
Серводвигатели на самом деле могут не относиться к одному из типов электродвигателей и, вероятно, представляют собой отдельную категорию, но поскольку в самых простых небольших из них используются двигатели с постоянным магнитом BDC вместе с системой управления с обратной связью, мы решили упомяните их и здесь. Серводвигатели — это механические устройства или приводы, которые очень удобны, когда дело доходит до точного управления положением, скоростью или ускорением. Они состоят из двигателя постоянного тока, датчика положения и контроллера.
Серводвигатели — это механические устройства или приводы, которые очень удобны, когда дело доходит до точного управления положением, скоростью или ускорением. Они состоят из двигателя постоянного тока, датчика положения и контроллера.
Бесщеточный DC
Вы, наверное, заметили, что щетки и их взаимодействие с механическим коммутатором двигателей BDC являются причиной появления бесщеточных электродвигателей постоянного тока. Что ж, щетки изнашиваются и требуют обслуживания и замены, а щетки создают искры, которые опасны для мест, где есть вероятность взрыва.
Бесщеточные двигатели постоянного тока коммутируются с помощью электроники, что обеспечивает им более длительный срок службы, лучшие характеристики скорости и крутящего момента, высокую эффективность, лучший динамический отклик и более высокие изменения скорости, а также бесшумную работу.
Эти типы электродвигателей могут использоваться как для переменных, так и для фиксированных нагрузок, а также для позиционирования, и они становятся все более популярными на рынке.
Видео, в котором сравниваются щеточные двигатели постоянного тока с бесщеточными двигателями постоянного тока, и критерии выбора между ними см. Здесь.
Заключение
Таким образом, речь шла о типах электродвигателей. Мы попытались представить простое руководство по этим типам двигателей. В настоящее время существуют разные и гибкие.Назначение двигателя — всякий раз, когда «требуется управление движением», это лучший выбор. Двигатель должен поддерживать использование и общее функционирование системы. Это отличный шанс, если вам нужно больше узнать о типах электродвигателей, не стесняйтесь зарегистрироваться в Linquip. Наши специалисты будут рады получить ваши вопросы и с энтузиазмом на них ответить.
Типы электродвигателей — Thomson Lamination Company, Inc.
Электродвигатели можно найти во многих сферах применения, от обычных предметов домашнего обихода до различных видов транспорта и даже передовых аэрокосмических приложений. Здесь мы делимся руководством, которое поможет вам лучше понять доступные варианты.
Здесь мы делимся руководством, которое поможет вам лучше понять доступные варианты.
Сравнение электродвигателей и генераторов
И электродвигатели, и генераторы представляют собой электромагнитные устройства с обмоткой якоря или ротором, который вращается внутри обмотки возбуждения или статора; однако у них противоположные функции. Генераторы преобразуют механическую энергию в электрическую, а двигатели преобразуют электрическую энергию в механическую.
Два типа электродвигателей
Обмотка возбуждения в электродвигателях вырабатывает электрический ток для создания фиксированного магнитного поля, которое обмотка якоря использует для создания крутящего момента на валу электродвигателя.Различия между различными типами электродвигателей связаны с их уникальной работой, напряжением и требованиями к применению. Существует как минимум дюжина различных типов электродвигателей, но есть две основные классификации: переменного тока (AC) или постоянного тока (DC). То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом для создания механической силы, создает дополнительные различия в каждой из этих классификаций.
То, как обмотки в двигателях переменного и постоянного тока взаимодействуют друг с другом для создания механической силы, создает дополнительные различия в каждой из этих классификаций.
Двигатели постоянного тока
Матовые двигателиЩеточные двигатели состоят из четырех основных компонентов:
- Статор
- Ротор или якорь
- Кисти
- Коммутатор
Существует четыре основных типа щеточных двигателей, в том числе:
- Двигатели серии. Статор включен последовательно или идентичен ротору, поэтому их токи возбуждения идентичны. Характеристики: используется в кранах и лебедках, большой крутящий момент на низкой скорости, ограниченный крутящий момент на высокой скорости.
- Параллельные двигатели. Катушка возбуждения параллельна (шунтируется) ротору, благодаря чему ток двигателя равен сумме двух токов. Характеристики: используется в промышленности и автомобилестроении, отличное управление скоростью, высокий / постоянный крутящий момент на низких скоростях.
- Кумулятивные составные двигатели. Этот тип сочетает в себе аспекты как последовательного, так и закрытого типов, делая ток двигателя равным сумме как последовательных, так и шунтирующих токов поля. Характеристики: используется в промышленности и автомобилестроении, объединяет преимущества как серийных, так и параллельных двигателей.
- Двигатели PMDC (постоянный магнит). Наиболее распространенный тип щеточных электродвигателей, электродвигатели с постоянным постоянным током, в которых для создания поля статора используются постоянные магниты. Характеристики: используется в коммерческом производстве игрушек и бытовой техники, дешевле в производстве, хороший крутящий момент на нижнем конце, ограниченный крутящий момент на верхнем конце.
Двигатели категории бесколлекторных не имеют коллектора и щеток. Вместо этого ротор представляет собой постоянный магнит, а катушки находятся на статоре. Вместо того, чтобы управлять магнитными полями на роторе, бесщеточные двигатели управляют магнитными полями статора, регулируя величину и направление тока в катушках. Одним из основных преимуществ бесщеточных двигателей является их эффективность, которая позволяет лучше контролировать и производить крутящий момент в более компактной сборке.
Двигатели переменного тока
Двигатели, относящиеся к классификации двигателей переменного тока, бывают синхронными или асинхронными, в первую очередь различаются скоростью ротора относительно скорости статора. Скорость ротора относительно статора в синхронном двигателе равна, но скорость ротора меньше, чем его синхронная скорость в асинхронном двигателе. Кроме того, синхронные двигатели имеют нулевое скольжение и требуют дополнительного источника питания, в то время как асинхронные или асинхронные двигатели имеют скольжение и не требуют вторичного источника питания.
Синхронный двигательСинхронный двигатель — это машина с двойным возбуждением, то есть он имеет два электрических входа. В обычном трехфазном синхронном двигателе один вход, обычно трехфазный переменный ток, питает обмотку статора, создавая трехфазный вращающийся магнитный поток. Питание ротора обычно осуществляется постоянным током, который возбуждает или запускает ротор. Как только поле ротора сцепляется с полем статора, двигатель становится синхронным.
Асинхронный (индукционный)В отличие от синхронных двигателей, асинхронные двигатели позволяют запускать асинхронные двигатели, подавая питание на статор без подачи питания на ротор.Асинхронные двигатели имеют конструкцию с возбуждением или с короткозамкнутым ротором. Некоторые примеры асинхронных асинхронных двигателей включают:
- Индукционные двигатели с конденсаторным пуском. Это однофазный двигатель с ротором и двумя обмотками статора, запускаемый конденсатором. Их использование включает компрессоры и насосы в холодильниках и системах переменного тока с частым запуском и остановом.
- Асинхронные двигатели с короткозамкнутым ротором. Трехфазное питание создает магнитное поле в обмотке статора в этом двигателе, который включает в себя ротор с короткозамкнутым ротором, сделанный из листовой стали с высокой проводимостью.Это недорогие, низкие эксплуатационные расходы и высокоэффективные двигатели, используемые в центробежных насосах, промышленных приводах, больших нагнетателях и вентиляторах, станках, токарных станках и другом токарном оборудовании.
- Двигатели с двойным короткозамкнутым ротором. Эти двигатели решают проблемы с низким пусковым крутящим моментом в двигателях с короткозамкнутым ротором. Их конструкция уравновешивает отношение реактивного сопротивления к сопротивлению между внешней и внутренней клеткой, увеличивая пусковой крутящий момент при сохранении общей эффективности.
Нажмите, чтобы развернуть
Идентификация электродвигателя
Выбор двигателя, наиболее подходящего для конкретного применения, зависит от четырех характеристик:
- Мощность и скорость
- Рама двигателя
- Требования к напряжению
- Корпуса и монтажные позиции
Металлическая табличка, прикрепленная к двигателю, содержит важную информацию, относящуюся к этим характеристикам, за исключением информации о корпусе.
Номинальная мощность и скорость электродвигателя
Как номинальная мощность, так и номинальная частота вращения (об / мин) должны соответствовать требованиям к нагрузке для установленного приложения. Двигатели бывают разных категорий мощности, в том числе: дробные двигатели (от 1/20 до 1 л.с.), встроенные двигатели (от 1 до 400 л.с.) и большие двигатели (от 100 до 50 000 л.с.). Номинальные значения частоты вращения включают 3600 об / мин (2 полюса), 1800 об / мин (4 полюса) и 1200 об / мин (6 полюсов).
Рама электродвигателя
Размер рамы двигателя не указывает на его рабочие характеристики, особенно на номинальную мощность в лошадиных силах.Национальная ассоциация производителей электрооборудования (NEMA) разработала номера корпусов, соответствующие монтажным размерам, с их цифрами, относящимися к их размеру «D» или расстоянию от центра вала до центра нижней части крепления. Как правило, двухзначные метки предназначены для дробных двигателей, но в них могут быть встроены двигатели большей мощности.
Требования к напряжению
Напряжение, частота и фаза — все это часть требований к напряжению. В большинстве случаев в Северной Америке и Европе трехфазные двигатели оснащены дисплеями с двойным напряжением, например 230/460.Стандартная рабочая частота для большинства электродвигателей составляет 60 Гц, хотя в Европе распространены двигатели с частотой 50 Гц. Это изменение в герцах указывает на то, что двигатель будет работать со скоростью 5/6 от нормальной скорости вращения. Фаза — это последний бит информации, включенный в требования к напряжению двигателя, указывающий тип требуемого источника питания, например трехфазный, однофазный и постоянный ток.
Корпуса и монтажные позиции
Информация о корпусе зависит от среды, в которой установлен двигатель.Есть две основные категории корпусов: открытые двигатели и закрытые двигатели.
Открытые двигателиПрименения для открытых двигателей включают помещения в относительно чистых и сухих помещениях, что важно, поскольку открытые кожухи двигателей обеспечивают циркуляцию воздуха через обмотки.
Закрытые двигателиЭти типы не допускают свободного воздухообмена между внешней и внутренней частью двигателя. Различия в герметичности корпуса и характеристиках охлаждения дополнительно различают двигатели закрытого типа, в том числе:
- Полностью закрытый с вентиляторным охлаждением (TEFC)
- Полностью закрытые, невентилируемые (TENV)
- Полностью закрытый воздуховод (TEAO)
- Полностью закрытая промывка (TEWD)
- Взрывозащищенные корпуса (EXPL)
- Опасная зона (HAZ)
Найдите электродвигатель, наиболее подходящий для вашего применения
Thomson Lamination Company — ведущий производитель штампованных компонентов для ламинирования двигателей, способный производить большие партии пластин ротора и статора из металлов с высокой проводимостью.
Ознакомьтесь с нашими возможностями по производству ламинации или свяжитесь с нами, чтобы узнать больше о наших решениях для ламинирования с электродвигателем.
Различные типы двигателей и их применение
При покупке двигателя часто спрашивают, какая технология лучше, переменного или постоянного тока, но на самом деле это зависит от области применения и стоимости.
Двигатели переменного тока
Двигатели переменного токаобладают высокой гибкостью по многим функциям, включая управление скоростью (VSD — приводы с регулируемой скоростью), и имеют гораздо большую установленную базу по сравнению с двигателями постоянного тока, некоторые из ключевых преимуществ:
- Низкое энергопотребление при запуске
- Контролируемое ускорение
- Регулируемая рабочая скорость
- Управляемый пусковой ток
- Регулируемый предел крутящего момента
- Снижение нарушений в ЛЭП
Текущая тенденция для VSD заключается в добавлении дополнительных функций и функций программируемого логического управления (ПЛК), которые добавляют преимущества, но требуют большего технического опыта во время обслуживания.
Щелкните здесь, чтобы увидеть пример двигателя переменного тока от RS
Типы двигателей переменного тока включают:
Синхронный
В этом типе двигателя вращение ротора синхронизировано с частотой питающего тока, а скорость остается постоянной при переменных нагрузках, поэтому он идеально подходит для привода оборудования с постоянной скоростью и используется в высокоточных устройствах позиционирования, таких как роботы. , КИПиА
Щелкните здесь, чтобы увидеть пример синхронного двигателя из RS
Индукция (асинхронная)
Этот тип двигателя использует электромагнитную индукцию из магнитного поля обмотки статора для создания электрического тока в роторе и, следовательно, крутящего момента.Это наиболее распространенный тип двигателей переменного тока, который важен для промышленности из-за их нагрузочной способности, при этом однофазные асинхронные двигатели используются в основном для небольших нагрузок, например, в бытовой технике, тогда как трехфазные асинхронные двигатели чаще используются в промышленности. приложения, включая компрессоры, насосы, конвейерные системы и подъемные механизмы.
Нажмите здесь, чтобы увидеть пример асинхронного двигателя RS
Двигатели постоянного тока
Двигатели постоянного токабыли первым широко используемым типом двигателей, и начальные затраты на системы (двигатели и привод) обычно ниже, чем на системы переменного тока для маломощных агрегатов.Однако при более высокой мощности общие затраты на техническое обслуживание увеличиваются, и это необходимо учитывать. Скорость двигателей постоянного тока можно регулировать путем изменения напряжения питания, они доступны в широком диапазоне напряжений, самые популярные типы — 12 и 24 В. Преимущества двигателя постоянного тока:
- Простая установка
- Регулировка скорости в широком диапазоне
- Быстрый запуск, остановка, реверсирование и ускорение
- Высокий пусковой крутящий момент
- Линейная кривая скорость-крутящий момент
Двигатели постоянного тока широко используются в небольших инструментах и бытовой технике, вплоть до электромобилей, подъемников и подъемников
Щелкните здесь, чтобы увидеть пример двигателей постоянного тока от RS
Два общих типа:
Матовый
Это более традиционный тип двигателя, который обычно используется в приложениях, чувствительных к стоимости, где система управления относительно проста, например, в потребительских приложениях и более простом промышленном оборудовании, эти типы двигателей можно разбить на:
- Series Wound — здесь обмотка возбуждения соединена последовательно с обмоткой ротора, а регулирование скорости осуществляется путем изменения напряжения питания, однако этот тип обеспечивает плохое управление скоростью, и по мере увеличения крутящего момента на двигателе скорость падает.Применяется в автомобилях, подъемниках, подъемниках и кранах, поскольку он имеет высокий пусковой крутящий момент.
- Шунтирующая обмотка — Этот тип имеет один источник напряжения, а обмотка возбуждения подключена параллельно обмотке ротора и может обеспечивать повышенный крутящий момент без снижения скорости из-за увеличения тока двигателя. Он имеет средний уровень пускового момента при постоянной скорости, поэтому подходит для таких применений, как токарные станки, пылесосы, конвейеры и шлифовальные машины.
- Составная обмотка — это совокупность последовательностей и шунтов, где полярность шунтирующей обмотки такова, что она добавляется к последовательным полям.Этот тип имеет высокий пусковой крутящий момент и может плавно работать при незначительном изменении нагрузки, он используется для привода компрессоров, центробежных насосов с регулируемым напором, ротационных прессов, дисковых пил, ножниц, элеваторов и конвейеров непрерывного действия
- Постоянный магнит — Как следует из названия, вместо электромагнита используется постоянный магнит, который используется в приложениях, где требуется точное управление и низкий крутящий момент, например, в робототехнике, сервосистемах.
Бесщеточный
Бесщеточные двигатели устраняют некоторые проблемы, связанные с более распространенными щеточными двигателями (короткий срок службы для интенсивных применений), и имеют более простую механическую конструкцию (не имеют щеток).Контроллер мотора использует датчики Холла для определения положения ротора, с помощью которых контроллер может точно управлять мотором с помощью тока в катушках ротора) для регулирования скорости. Преимущества этой технологии — долгий срок службы, небольшие затраты на обслуживание и высокий КПД (85-90%), тогда как недостатки — более высокие начальные затраты и более сложные контроллеры. Эти типы двигателей обычно используются для регулирования скорости и положения в приложениях, где требуется надежность и устойчивость, таких как вентиляторы, насосы и компрессоры.
Примером бесщеточной конструкции являются шаговые двигатели, которые в основном используются для управления положением без обратной связи, от принтеров до промышленных приложений, таких как высокоскоростное оборудование для захвата и размещения.
Бесщеточные двигатели также доступны с устройством обратной связи, которое позволяет управлять скоростью, крутящим моментом и положением двигателя, а интеллектуальная электроника управляет всеми тремя, поэтому, если для быстрого ускорения до определенной скорости требуется больший крутящий момент, то подается больший ток. , они известны как бесщеточные сервомоторы.
Пример щеточного и бесщеточного двигателей постоянного тока
Что такое электродвигатель? Определение и типы
Определение : Электродвигатель — это электромеханическая машина, преобразующая электрическую энергию в механическую. Другими словами, устройство, создающее вращающую силу, называется двигателем. Принцип работы электродвигателя в основном зависит от взаимодействия магнитного и электрического поля. Электродвигатели в основном подразделяются на два типа.Это двигатель переменного тока и двигатель постоянного тока. Двигатель переменного тока принимает переменный ток в качестве входа, тогда как двигатель постоянного тока принимает постоянный ток.
Типы электродвигателей
Классификация электродвигателя показана на рисунке ниже.
Двигатель переменного тока
Двигатель переменного тока преобразует переменный ток в механическую энергию. Он подразделяется на три типа; это асинхронный двигатель, синхронный двигатель, линейный двигатель. Подробное описание двигателя приведено ниже.
1. Асинхронный двигатель
Машина, которая никогда не работает с синхронной скоростью, называется асинхронным или асинхронным двигателем. Этот двигатель использует явление электромагнитной индукции для преобразования электроэнергии в механическую. По конструкции ротора различают два типа асинхронных двигателей. А именно асинхронный двигатель с короткозамкнутым ротором и асинхронный двигатель с фазной обмоткой.
- Ротор с короткозамкнутым ротором — Двигатель, который состоит из ротора с короткозамкнутым ротором, известен как асинхронный двигатель с короткозамкнутым ротором.Ротор с короткозамкнутым ротором уменьшает гудение и магнитную блокировку ротора.
- Ротор с фазовой обмоткой — Этот ротор также известен как ротор с контактным кольцом, а двигатель, использующий этот тип ротора, известен как ротор с фазовой обмоткой.
По фазам асинхронный двигатель подразделяется на два типа. Это однофазный асинхронный двигатель и трехфазный асинхронный двигатель.
- Однофазный асинхронный двигатель — Машина, которая преобразует электрическую мощность однофазного переменного тока в механическую с помощью явления электромагнитной индукции, известна как однофазный асинхронный двигатель.
- T Трехфазный асинхронный двигатель — Двигатель, который преобразует трехфазную электрическую мощность переменного тока в механическую энергию, такой тип двигателя известен как трехфазный асинхронный двигатель.
2. Линейный двигатель
Двигатель, который создает линейную силу вместо силы вращения, известен как линейный двигатель. Этот двигатель имеет развернутые ротор и статор. Такой тип двигателя используется в раздвижных дверях и в приводах.
3. Синхронный двигатель
Машина, которая преобразует переменный ток в механическую энергию с желаемой частотой, известна как синхронный двигатель.В синхронном двигателе скорость двигателя синхронизирована с частотой питающего тока.
Синхронная скорость измеряется относительно вращения магнитного поля и зависит от частоты и полюсов двигателя. Синхронный двигатель подразделяется на два типа: реактивный и гистерезисный.
- Реактивный двигатель — Двигатель, процесс пуска которого аналогичен асинхронному двигателю и который работает как синхронный двигатель, известен как реактивный двигатель.
- Двигатель с гистерезисом — Двигатель с гистерезисом представляет собой тип синхронного двигателя, который имеет равномерный воздушный зазор и не имеет системы возбуждения постоянным током. Крутящий момент в двигателе создается гистерезисом и вихревым током двигателя.
Двигатель постоянного тока
Машина, преобразующая электрическую мощность постоянного тока в механическую, известна как двигатель постоянного тока. Его работа зависит от основного принципа: когда проводник с током помещается в магнитное поле, на него действует сила и возникает крутящий момент.Электродвигатели постоянного тока подразделяются на два типа: электродвигатели с самовозбуждением и электродвигатели с независимым возбуждением.
1. Двигатель с автономным возбуждением
Двигатель, в котором обмотка постоянного тока возбуждается от отдельного источника постоянного тока, известен как двигатель постоянного тока с отдельным возбуждением. С помощью отдельного источника обмотка якоря двигателя возбуждается и создает магнитный поток.
2. Двигатель с самовозбуждением
По подключению обмотки возбуждения двигатели постоянного тока с самовозбуждением подразделяются на три типа.Это двигатель постоянного тока с последовательной обмоткой, шунтирующий двигатель и двигатель постоянного тока с комбинированной обмоткой.
- Шунтирующий двигатель — Двигатель, в котором обмотка возбуждения расположена параллельно якорю, такой тип двигателя известен как параллельный двигатель.
- Двигатель серии — В этом двигателе обмотка возбуждения соединена последовательно с якорем двигателя.
- Двигатель с комбинированной обмоткой — Двигатель постоянного тока, который имеет как параллельное, так и последовательное соединение обмотки возбуждения, известен как комбинированный ротор.Двигатель с комбинированной обмоткой подразделяется на двигатели с коротким и длинным шунтом.
- Короткий шунтирующий двигатель — Если шунтирующая обмотка возбуждения параллельна только якорю двигателя, а не последовательному полю, то это известно как короткое шунтирующее соединение двигателя.
- Длинный шунтирующий двигатель — Если шунтирующая обмотка возбуждения параллельна якорю и последовательной обмотке возбуждения, то двигатель называется длинным шунтирующим двигателем.
Помимо вышеупомянутых двигателей, существуют различные другие типы специальных машин, которые имеют дополнительные функции, такие как шаговый двигатель, серводвигатель переменного и постоянного тока и т. Д.
Электродвигатели— различные типы и применения каждого двигателя
Электродвигатель — это удобное устройство, вырабатывающее механическую энергию из электрической энергии. Сегодня двигатели используются как в жилых, так и в промышленных условиях. Однако выбор двигателя будет зависеть от ваших конкретных потребностей.
Во-первых, различные типы двигателей на рынке делают процесс покупки утомительным. Вы должны выбирать между двигателями переменного тока, двигателями постоянного тока и двигателями специального назначения.
Типы двигателей переменного тока
Асинхронный двигатель переменного тока
Асинхронный двигатель является наиболее распространенным типом двигателя переменного тока на современном рынке. Его также называют асинхронным. Асинхронный двигатель переменного тока работает с импульсом ниже его синхронной скорости. Здесь электрический ток создает крутящий момент в роторе. Асинхронные двигатели используют электромагнитную индукцию для преобразования энергии из электрической в механическую.
Классификация асинхронных двигателей основана на типе ротора; беличья клетка или контактное кольцо.Асинхронные двигатели отлично подходят для промышленности из-за их допустимой нагрузки.
Конструкция компрессоров, насосов, подъемных механизмов и конвейерных систем входит в число его многочисленных областей применения.
Синхронный двигатель переменного тока
Этот тип двигателя в основном зависит от трехфазного источника питания. Статор генерирует ток возбуждения, в то время как ротор зависит от тока возбуждения для своего вращения. Скорость вращения ротора соответствует частоте подаваемого тока.В этом двигателе импульс не зависит от нагрузки.
Синхронные двигатели переменного токанаходят широкое применение в робототехнике, управлении технологическими процессами и автоматизации. Эти двигатели используются в большинстве оборудования с постоянной скоростью.
Типы двигателей постоянного тока
Матовый двигатель постоянного тока
В этом двигателе устройство щеток статора определяет ток. Его крутящий момент создается от источника постоянного тока с помощью электромагнитов. Они дешевы и очень эффективны.
В машинах с высоким пусковым моментом, таких как краны, подъемники и лифты, используются щеточные электродвигатели постоянного тока.Они также применимы для целей с постоянной скоростью, таких как пылесосы и конвейеры.
Бесщеточный двигатель постоянного тока
Эти двигатели обеспечивают высокую производительность при меньшем размере по сравнению с щеточными двигателями постоянного тока. Они работают с контактными кольцами, коммутаторами или встроенным контроллером.
Их эффективность, улучшенный динамический отклик, бесшумная работа и высокая скорость переключения делают их отличным выбором для большинства отраслей промышленности. Фиксированная нагрузка, переменная нагрузка и положение зависят от этого типа двигателя.
Другие типы двигателей
Серводвигатели
Это двигатели, соединенные с датчиками обратной связи для помощи в позиционировании, что является ключом к робототехнике. Они позволяют точно контролировать угловое положение, ускорение и скорость. Серводвигатели обладают высокой эффективностью и точностью, поэтому используются во вращающихся компонентах машин.
Его приложения включают строительство игрушек, автомобилей, самолетов, бытовой электроники и т. Д.
Шаговый двигатель
Судя по названию, шаговые двигатели работают ступенчато.Он преобразует электрическую энергию в обширные дискретные механические ступени. Поскольку другие двигатели вращаются на 180 градусов, шаговые двигатели могут делать десять шагов по 18 градусов каждый.
В этом случае для завершения оборота потребуется десять электрических импульсов. Они используются в плоттерах, производстве схем, инструментах управления технологическим процессом, медицинских сканерах, жидкостных насосах, респираторах, автоматической фокусировке цифровых камер и т. Д.
Гистерезисный двигатель
В гистерезисных двигателях магнитные поля статора и ротора противоположны.Как только ротор намагничен, вам потребуется мощное обратное магнитное поле, чтобы перевернуть его. Гистерезис и вихревые токи от ротора создают крутящий момент.
Двигатели с гистерезисоммогут генерировать крутящий момент без пульсаций, пока вы не достигнете синхронной скорости. Они используются при изготовлении звуковых проигрывателей, диктофонов и т. Д.
В Mader Electric наша команда экспертов готова помочь вам со всеми вашими потребностями в обслуживании двигателей как в бизнесе, так и в быту. Свяжитесь с нами сегодня, если у вас возникнут какие-либо вопросы или проблемы, связанные с электродвигателями, и наши специалисты будут рады помочь вам найти нужные решения.
Типы двигателей и принцип их работы (для коммерческого и промышленного применения)
Двигатели — это механические или электромеханические устройства, преобразующие энергию в движение. Энергия в форме электрической, гидравлической или пневматической преобразуется во вращательное или линейное движение, а затем выводится на вал или другой компонент передачи энергии, где она обеспечивает полезную работу. Электродвигатели включают разновидности переменного или постоянного тока, которые далее подразделяются на электродвигатели специального назначения, включая мотор-редукторы, шаговые двигатели, серводвигатели и линейные двигатели.Гидравлические и пневматические двигатели используют жидкость (масло, воздух) в качестве движущей силы. К химическим двигателям относятся подвесные моторы для использования на лодках и ракетных двигателях, оба из которых используют внутреннее сгорание и часто называются двигателями. Электродвигатель, используемый для приведения в движение небольших рыбацких лодок, называется троллинговым двигателем. Ни одна из этой последней группы здесь не обсуждается.
Типы двигателей (и принцип их работы)
Двигатели переменного тока
Двигатели переменного тока— это электромеханические устройства, приводимые в действие переменным током для создания вращательного движения.Вращение обеспечивает механическую работу для привода других вращающихся машин, таких как насосы. Стандартные размеры корпуса доступны в широком диапазоне мощностей, чтобы облегчить взаимозаменяемость. Корпуса могут варьироваться от простых открытых конструкций до взрывозащищенных невентилируемых конструкций, обычно полностью закрытые с вентиляторным охлаждением (TEFC). Международная рейтинговая система также предписывает уровни охлаждения и защиты. Двигатели переменного тока составляют значительную часть используемых сегодня двигателей и приводят в действие насосы, вентиляторы, компрессоры и т. Д. Диапазон размеров от машин с малой мощностью до 20 000 л.с.Двигатели переменного тока будут одно- или трехфазными.
Трехфазные машины классифицируются по конструкции ротора: с короткозамкнутым ротором или с фазным ротором. В конструкции с короткозамкнутым ротором используются медные или алюминиевые стержни ротора, закороченные концевыми кольцами, и в определенном смысле они представляют собой настоящие индукционные машины — своего рода вращающийся трансформатор. В роторах с обмоткой используется проволочная обмотка ротора, количество полюсов которой равно количеству полюсов статора, а контактные кольца обеспечивают метод вставки сопротивления для запуска и изменения скорости. Пуск трехфазных машин при полном напряжении или через линию возможен примерно до 200 л.с., после чего часто требуется метод пониженного напряжения, особенно для двигателей, которые запускаются часто, из-за заметного падения напряжения, влияющего на освещение. , другие двигатели и т. д.
Однофазные двигатели используются в основном в диапазонах малых л.с. Они не запускаются автоматически и могут быть сгруппированы по способу запуска. Наиболее широко используемая конструкция — двигатель с расщепленной фазой — использует две обмотки статора для получения пары несбалансированных токов обмотки, при этом вспомогательная обмотка отключается, когда двигатель приближается к синхронной скорости. Конденсаторный двигатель вставляет конденсатор во вспомогательную обмотку, который в случае конденсаторной пусковой машины выпадает, когда двигатель приближается к рабочей скорости, и, в случае двухзначного конденсаторного двигателя, переключается на второй конденсатор по мере приближения. скорость бега.В конструкции постоянного разделенного конденсатора вспомогательная обмотка и конденсатор остаются под напряжением на рабочей скорости. Наконец, в двигателе с экранированными полюсами используются неравномерно разделенные полюса с экранирующими катушками, которые заставляют вращающееся поле перемещаться в направлении заштрихованного полюса (т. Е. Необратимо). Двигатели с расщепленными полюсами — одни из самых дешевых из однофазных машин. В синхронизирующих устройствах используются синхронные однофазные двигатели.
Для получения дополнительной информации ознакомьтесь с нашей полной статьей о типах двигателей переменного тока.
Двигатели постоянного тока
Двигатели постоянного тока— это электромеханические устройства, приводимые в действие постоянным током для создания вращательного движения. Движение обеспечивает вращательную работу для приведения в движение других вращающихся машин, таких как подъемники, с разными скоростями. Определенные схемы проводки могут создавать сильный крутящий момент на низкой скорости, что делает их пригодными в качестве тяговых двигателей для локомотивов, хотя они в значительной степени были заменены двигателями с регулируемой частотой вращения. Точно так же двигатели для гольф-каров неуклонно переделываются от щеточных конструкций к более продвинутым формам с электронными приводами.Стандартные размеры корпуса доступны в широком диапазоне мощностей, чтобы облегчить взаимозаменяемость. Корпуса могут быть от простых открытых до взрывозащищенных, невентилируемых. Международная рейтинговая система также предписывает уровни охлаждения и защиты. Двигатели постоянного тока находят множество применений в игрушках и потребительских товарах и широко используются автопроизводителями. Они находят обслуживание на лифтах, вилочных электропогрузчиках и конвейерах, где нагрузки с постоянным крутящим моментом являются нормальным явлением. Двигатели постоянного тока доступны в щеточном и бесщеточном исполнении (с постоянными магнитами), причем последние требуют для работы электронных приводов и контроллеров.
Традиционные щеточные двигатели постоянного тока классифицируются на основе возбуждения, используемого в обмотке возбуждения, с тремя основными различиями: шунтирующие, последовательные и составные. Шунтовые двигатели имеют низкий пусковой момент, низкую перегрузочную способность, минимальное изменение скорости в ответ на нагрузку и плохую стабильность при нулевой нагрузке. Серийные двигатели обладают высокими пусковыми моментами, высокой перегрузочной способностью, значительным изменением скорости в зависимости от нагрузки и хорошей стабильностью при нулевой нагрузке. Составные двигатели находятся где-то между двумя другими по характеристикам, хотя они тоже остаются стабильными при нулевой нагрузке.
Для двигателей постоянного тока мощностью более 3/4 л.с. необходимо использовать стартеры для ограничения пускового тока во избежание возгорания коммутаторов.
Мотор-редукторы
Мотор-редукторы— это электромеханические устройства, приводимые в действие переменным или постоянным током для создания вращательного движения. Движение обеспечивает вращательную работу, которая затем понижается через встроенный редуктор для привода других вращающихся машин, таких как конвейеры или упаковочные машины. Мотор-редукторы используются там, где требуется, чтобы двигатели и редукторы скорости обеспечивали высокий крутящий момент на низких скоростях.За счет интеграции этих двух компонентов мотор-редукторы достигают КПД по размеру, устраняют внешние муфты, улучшают сопротивление смыванию и т. Д. Часто редукторы взаимозаменяемы между производителями. Хотя мотор-редукторы редко используются для больших двигателей, они довольно часто имеют дробную мощность. Они доступны с различными типами выходных валов с выбором среди двигателей переменного тока, щеточных и бесщеточных двигателей постоянного тока.
Шаговые двигатели
Шаговые двигатели— это электромеханические устройства, приводимые в действие переменным током для создания вращательного движения и позиционирования.Как правило, шаговые двигатели не включают в себя контур обратной связи, как серводвигатели, а вместо этого достигают управления положением, поворачивая ротор двигателя на дискретное количество шагов. Они специфичны для приложений управления движением. Шаговые двигатели используются в приложениях позиционирования, где важно удерживать позицию, и используются на упаковочных машинах, принтерах и т. Д., Где потеря положения из-за перегрузки не критична и где важна экономия.
Серводвигатели
Серводвигатели— это электромеханические устройства, приводимые в действие переменным или постоянным током для создания вращательного движения и позиционирования.Серводвигатели используют контур обратной связи для управления радиальным положением ротора двигателя относительно его статора. Они специфичны для приложений управления движением. Серводвигатели используются в приложениях для позиционирования, где первостепенное значение имеет плавное управляемое движение, например, в промышленных роботах. Во втором примере упаковочная машина может использовать серводвигатель для индексации точного количества упаковочной пленки в зону формования, где в прошлом такая подача могла регулироваться с помощью механического индексатора с приводом от двигателя.
Линейные двигатели
Линейные двигатели— это электромеханические устройства, приводимые в действие переменным или постоянным током для создания линейного, а не вращательного движения. Линейное движение полезно в приложениях, где можно использовать воздушный цилиндр, но где требуется большая точность и обратная связь по положению, или где движение может изменяться от хода к ходу. Конфигурация двигателя и форма движка / ползуна также могут быть проблемой. Линейные двигатели используются в упаковочных машинах, сборочных машинах, подъемно-транспортном оборудовании и в различных областях медицинского оборудования.
Пневматические двигатели
Пневматические двигатели— это механические устройства, приводимые в действие давлением воздуха для создания вращательного движения. Движение обеспечивает вращательную работу для привода других вращающихся машин, таких как приемные бобины и инструменты. Пневматические двигатели используются там, где есть источник сжатого воздуха и где необходим постоянный крутящий момент независимо от скорости, например, на приемной бобине на упаковочной машине. Они также используются во взрывоопасных средах, где считаются искробезопасными.
Гидравлические двигатели
Гидравлические двигатели— это механические устройства, приводимые в действие жидкостью для создания вращательного движения. Движение обеспечивает вращательную работу для привода других вращающихся элементов, таких как ведущие колеса экскаватора тяжелого оборудования. Гидравлические двигатели широко используются в строительной технике, где требуется вращательное движение от компактного устройства, а гидравлическая энергия уже доступна. Гидравлические двигатели могут быть лопастными, шестеренчатыми или поршневыми, как и гидравлические насосы. Двигатели LSHT или низкоскоростные двигатели с высоким крутящим моментом доступны у некоторых производителей.Модифицированный лопаточный двигатель, называемый роторным двигателем абатмента, имеет более низкое трение и лучшее уплотнение, чем эквивалентный лопастный двигатель.
Различные области применения двигателей и отрасли
Среди двигателей переменного, постоянного, шестеренчатого, пневматического и гидравлического двигателей они обеспечивают вращательное движение, в то время как шаговые, сервомоторы и линейные двигатели обеспечивают позиционирование. Электродвигатель переменного тока — вероятный выбор для привода насоса; двигатель постоянного тока хорошо подходит для привода барабана крана, где важна переменная скорость; мотор-редукторы выполняют те же функции, что и двигатели постоянного и переменного тока без покрытия, за исключением того, что они имеют встроенные редукторы; а воздушные и гидравлические двигатели удовлетворяют аналогичные потребности в ситуациях, когда электричество нецелесообразно или неприемлемо.
Позиционирование — это область трех других типов, что означает, что эти типы используются там, где элементы машины необходимо переместить в точные места. В то время как машины вращательного движения охватывают весь спектр размеров от очень маленьких субфракционных единиц HP до самых больших машин, превышающих NEMA, шаговые, сервоприводы и линейные двигатели обычно имеют максимальную мощность в несколько лошадиных сил и превосходят в меньших размерах.
Трехфазные асинхронные двигатели переменного тока широко используются в промышленности. В них используются роторы с короткозамкнутым ротором (бесщеточные), которые создают магнитные поля в обмотках полюсов, которые затем взаимодействуют с магнитными полями обмоток статора, вызывая вращение.Скорость двигателя переменного тока зависит от количества полюсов и частоты приложенного напряжения, особенно часто встречаются 1800 (4-полюсный) и 3600 об / мин (2-полюсный). Фактическая скорость немного отстает от номинальной скорости вращающегося магнитного поля или линейной скорости и зависит от нагрузки. Синхронные двигатели переменного тока точно соответствуют скорости вращающегося поля независимо от нагрузки, но их применение обычно ограничивается особыми случаями, когда это важно, например, в двигателях-генераторах. Другой синхронный двигатель, так называемый двигатель переменного тока с постоянными магнитами, использует ту же технологию с постоянными магнитами, что и бесщеточные конструкции постоянного тока, для создания синхронных двигателей переменного тока, которые доступны в дробных и интегральных размерах л.с.Для этих двигателей требуются электронные приводы. Двигатели переменного тока по своей сути не подходят для управления скоростью, хотя существует ряд методов как в конструкции двигателя (с фазным ротором), так и в схеме контроллера, чтобы сделать возможным управление скоростью. Несколько обмоток — это один из способов получения двухскоростного асинхронного двигателя. Частотно-регулируемые приводы могут обеспечивать плавную регулировку скорости. Также доступны различные пускатели, такие как устройства плавного пуска, которые помогают снизить воздействие запуска двигателя, например, на бутылки на конвейерной линии.
Другой двигатель переменного тока, получивший название универсального двигателя или двигателя переменного тока серии , используется во многих устройствах, таких как пылесосы, дрели, вакуумные системы и т. Д. Он использует те же щетки и коммутатор, что и двигатель постоянного тока, но может работать от переменного тока. ток также, потому что направление переключения тока возбуждения точно совпадает с направлением коммутируемого тока якоря. Они имеют тенденцию к шуму при работе и лучше всего подходят для периодического использования, например, в электроинструментах, из-за износа щеток, но они могут регулировать скорость.
Двигатели постоянного тока предлагают внутреннее регулирование скорости в силу своей конструкции и использования нечастотного постоянного тока в качестве движущей силы. В двигателе постоянного тока обычно используются щетки для подачи постоянного тока на ротор. Контролируя уровень постоянного напряжения, оператор может напрямую управлять скоростью двигателя. Двигатели постоянного тока этой конструкции, иногда называемые коллекторными двигателями для установленного на валу коммутатора, на котором движутся щетки, используются в автомобилях и в основном в небольших приложениях.В своих больших размерах они используются в приложениях, где регулирование скорости является обязательным: подъемники и краны, станки, прессы и т. Д. С появлением более сильных магнитов стали популярными двигатели постоянного тока с постоянными магнитами, которые обходятся без щеток. Эти двигатели несколько ограничены по размеру, примерно в одну лошадиную силу в верхней части, и для их электронного переключения требуются приводы. Прорези между зубьями обмотки статора вызывают явление, известное как «зубчатость», а конструкция без зазоров представляет собой попытку преодолеть это явление.Доступны определенные конструкции с постоянными магнитами, которые обеспечивают высокий крутящий момент на низких скоростях, например, двигатели BLDC типа «блины», которые особенно подходят для роботизированных приложений. Существуют также небольшие двигатели постоянного тока, называемые микродвигателями, которые используются в электронных устройствах и т.п., часто питающихся от батареи.
Мотор-редукторы доступны как блоки переменного и постоянного тока, как правило, небольших размеров, где практично тесное соединение двигателя и коробки передач. Мотор-редукторы доступны с различными редукторами, такими как параллельный вал, прямой угол, планетарный редуктор и т. Д.
Шаговые двигатели предназначены для позиционирования. В их роторах используются постоянные магниты, которыми можно управлять через дискретные промежутки времени, возбуждая поле статора. Шаговый двигатель нуждается в контроллере / приводе для работы. Шаговые двигатели обычно имеют угол поворота 1,8 или менее градусов для каждого шага, но они могут быть дополнительно подразделены за счет использования так называемых микрошаговых контроллеров. Конструкция двигателя также играет роль в разрешающей способности шагового двигателя — количестве шагов на оборот — при этом 5-фазные двигатели предлагают большее количество шагов, чем 2-фазные двигатели.Шаговые двигатели обеспечивают относительно недорогой способ имитации позиционирования сервоприводов, хотя, как правило, им не хватает обратной связи по положению. Шаговые двигатели обычно могут удерживать нагрузку в остановленном состоянии, что является преимуществом для приложений позиционирования.
Серводвигатели — это позиционеры с истинной обратной связью, которые включают энкодеры для передачи информации о положении обратно своим контроллерам. Они контролируют как скорость, так и точность за счет использования контуров обратной связи. Специальный серводвигатель, называемый моментным двигателем, предназначен для приложения крутящего момента к валу, не обязательно его вращая, что может потребоваться для поддержания постоянного натяжения на натяжителе полотна.Конструкция позволяет двигателю создавать крутящий момент при остановке без перегрева. Его также можно использовать для прямого доступа к индексным таблицам.
Линейные двигатели лучше всего рассматривать как роторные двигатели, которые были «развернуты» для создания роторов, движущихся по линейным путям. Обычно они управляются сервоприводом, но также могут быть основаны на шаговом двигателе и использоваться для позиционирования и точного управления скоростью, чего нельзя достичь с помощью более дешевых средств, таких как воздушные цилиндры и т. Д. Некоторые производители предлагают линейные двигатели, которые также могут вращаться.Как и для любого серво- или шагового двигателя, для линейных двигателей требуются электронные приводы / контроллеры.
Пневматические двигатели просто приводятся в действие воздухом, а не электричеством и обычно используются в пневматических инструментах, таких как пневматические ключи и т. Д. Пневматические двигатели используются там, где требуется постоянный крутящий момент, например, на натяжных барабанах на машинах для обработки полотна. Они также используются во взрывоопасных средах, поскольку считаются искробезопасными. Скорость пневмодвигателя можно несколько изменить, дросселируя впускной клапан, что дает возможность бесплатно регулировать скорость, например, при использовании на подъемнике.
Гидравлические двигатели приводятся в действие гидравлической жидкостью и обычно используются на вращающихся элементах строительного оборудования, например, на колесных двигателях. Они мощные для своего размера, легко переворачиваются и регулируются по скорости. Для них требуются источники гидравлической энергии, которая на строительной технике с приводом от двигателя обычно осуществляется в виде гидравлических насосов / систем. Стационарные станции с меньшей вероятностью будут иметь гидравлическую энергию, доступную в качестве коммунальных услуг, поскольку они будут использовать сжатый воздух, но для них доступны так называемые гидравлические силовые агрегаты.
Соображения
Двигатели переменного и постоянного тока доступны в стандартных типоразмерах NEMA, что делает эти двигатели взаимозаменяемыми. Их иногда называют интегральными агрегатами высокого давления или просто средними машинами. Двигатели также бывают в виде дробных блоков HP, получивших название FHP или, проще говоря, малых, и имеют нестандартную конструкцию за пределами встроенных рамок NEMA, иногда называемых большими машинами. IEC предлагает аналогичные стандартизированные моторные корпуса и подразделения метрических размеров.
Варианты защиты обычно указываются в одной из двух форм: кода или классификации NEMA и кода IEC.Большинство двигателей представляют собой полностью закрытые двигатели с вентиляторным охлаждением, сокращенно TEFC, но существует множество разновидностей от открытых, каплезащищенных (ODP) до полностью закрытых, невентилируемых (TENV). Код IEC обеспечивает аналогичную классификацию с помощью двузначного цифрового кода, первый из которых определяет защиту корпуса от твердых предметов, а второй — уровень защиты от проникновения влаги. Например, двигатель со степенью защиты IP67 считается пыленепроницаемым и водонепроницаемым. Погружные двигатели, охлаждаемые иммерсивной жидкостью, доступны для скважинных насосов и т.п.
NEMA также делает различие между двигателями, работающими в непрерывном и прерывистом режиме. Двигатель с прерывистым режимом работы спроектирован для нечастого использования с достаточным охлаждением между пусками, как это может быть в случае с воздушным компрессором нижнего уровня, который также имеет рабочий цикл менее 100%. Также существует пятибуквенная рейтинговая система NEMA для описания работы двигателя, например «A», которая может использоваться для вентилятора, который не нужно запускать под нагрузкой, или «C», который подходит для конвейер, который, вероятно, запустился бы под нагрузкой.
Эти же коды могут применяться и к другим типам двигателей, особенно к редукторным, шаговым и серводвигателям.
Варианты монтажа включают монтаж на основании или на лапах и лицевой монтаж. В первом варианте двигатели поддерживаются на собственных основаниях — часто на одной раме с приводным оборудованием, тогда как во втором варианте двигатели прикреплены к корпусам ведомого оборудования, что иногда используется с насосами. Некоторые двигатели специально разработаны для работы в вертикальной ориентации.Эти так называемые специализированные двигатели предназначены для привода насосов и особенно подходят для работы в ограниченном пространстве, например, на борту судов.
Номинальная частота вращения и мощность являются основными характеристиками для определения двигателей ротационного типа. Количество фаз тоже важно, обычно одна или три.
Важные атрибуты и критерии выбора
Тип двигателя
Для блоков переменного тока основной выбор — между асинхронными и синхронными машинами. Двигатели с тормозом — это асинхронные машины со встроенными тормозами, которые могут удерживать нагруженный двигатель на месте.Для машин постоянного тока основной выбор — между бесщеточными агрегатами и теми, которые используют щетки. Мотор-редукторы предлагают многие из этих вариантов.
Ориентация на отрасль / предполагаемое применение
Многие двигатели предназначены для использования в обычных условиях, в то время как некоторые из них обладают специальными функциями или характеристиками, позволяющими использовать их в определенных областях применения. NEMA определяет множество двигателей специального назначения, в том числе для вентиляторов и воздуходувок, деревообрабатывающих станков и т. Д. Производители часто классифицируют свои двигатели специального назначения по этим линиям, т.е.например, работа на ферме, система отопления, вентиляции и кондиционирования воздуха, промывка и т. д. Специалисты по спецификациям двигателей могут полагаться на эти атрибуты, чтобы сузить выбор, выходя за пределы диапазона двигателей общего назначения. Один пример — 400 Гц. двигатели, предназначенные для авиационной и космической техники. В некоторых приложениях, таких как вибраторы для погрузочно-разгрузочных работ, могут использоваться электрические или пневматические двигатели.
Вращение вала
Обычно трехфазные асинхронные двигатели реверсивны. Многие из них могут работать в противоположном направлении, переключая провода в месте их подключения к двигателю.Некоторые двигатели, особенно небольшие синхронные двигатели, используемые для управления заслонкой и т. Д., Являются однонаправленными, но часто могут быть указаны как вращение по часовой стрелке или против часовой стрелки. Вращение двигателя обычно определяется, если смотреть со стороны привода (DE), то есть конца двигателя на стороне нагрузки или соединенной стороне. Для нереверсивных двигателей постоянного тока, однофазных двигателей переменного тока, синхронных и универсальных двигателей обычное направление — CW.
Напряжение двигателя
Двигатели среднего напряжения обычно работают от 2300 или 4000 вольт.Меньшие трехфазные двигатели общего назначения могут работать от источников питания 208–230 или 460 В. Однофазные двигатели обычно работают от источника питания 115 или 230 В.
Расчетный класс по NEMA
NEMA поддерживает ряд номинальных характеристик двигателя, которые определяют изоляцию и превышение температуры, которое он должен выдерживать.
Конструкция вала
Валы двигателей и могут быть заказаны со шпоночными пазами или плоскими шлицами для крепления муфт и т. Д. Они также могут быть короче стандартных валов. Валы также могут иметь резьбу для крепления резьбовых крепежных элементов.
ресурса
Торговые ассоциации
Коды и стандарты
Стандартов на двигателислишком много, чтобы их перечислить, но читатель может обратиться к организациям по стандартизации, таким как NEMA, IEC и NFPA (Nat’l Fluid Power Assn.), За их исчерпывающими сборниками стандартов на двигатели. Выборка включает:
- Гидравлический насос SAE J744 / Размеры опоры двигателя и привода
- NEMA MG1 Двигатели и генераторы
- NEMA SEM S1 Малые электродвигатели
- IEC 60034 Вращающиеся электрические машины
- NEMA ICS 16 Двигатели с управлением движением / положением, управление, обратная связь
Внешние ссылки
Сводка
Это руководство дает общее представление об электродвигателях и двигателях с гидравлическим приводом, а также об их выборе и использовании в различных средах.