Электродвигатели, их классификация
Электрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую.
В зависимости от назначения, от предполагаемых режимов и условий работы, от типа питания и т. д., все электродвигатели можно классифицировать по нескольким параметрам: по принципу получения рабочего момента, по способу работы, по роду тока питания, по способу управления фазами, по типу возбуждения и т. д. Давайте же рассмотрим классификацию электродвигателей более подробно.
Возникновение вращающего момента
Вращающий момент в электродвигателях может быть получен одним из двух способов: по принципу магнитного гистерезиса либо чисто магнитоэлектрически. Гистерезисный двигатель получает вращающий момент посредством явления гистерезиса во время перемагничивания магнитно-твердого ротора, в то время как у магнитоэлектрического двигателя вращающий момент является результатом взаимодействия явных магнитных полюсов ротора и статора.
Магнитоэлектрические двигатели по праву составляют сегодня львиную долю всего обилия электродвигателей, применяемых в очень многих областях. Они подразделяются по роду питающего тока на: двигатели постоянного тока, двигатели переменного тока и универсальные двигатели.
В отличие от магнитоэлектрического двигателя, в гистерезисном двигателе допускается перемещение намагниченности ротора относительно его геометрических осей, и именно данная особенность не позволяет распространять на синхронный режим работы гистерезисного двигателя общие закономерности магнитоэлектрического преобразования.
Двигатели постоянного тока
У двигателя, который питается постоянным током, за переключение фаз отвечает сам двигатель. Это значит, что хотя на электрическую машину и подается постоянный ток, тем не менее, благодаря действию внутренних механизмов устройства, магнитное поле оказывается движущимся и становится в состоянии поддерживать вращающий момент ротора (как будто в обмотке статора действует переменный ток).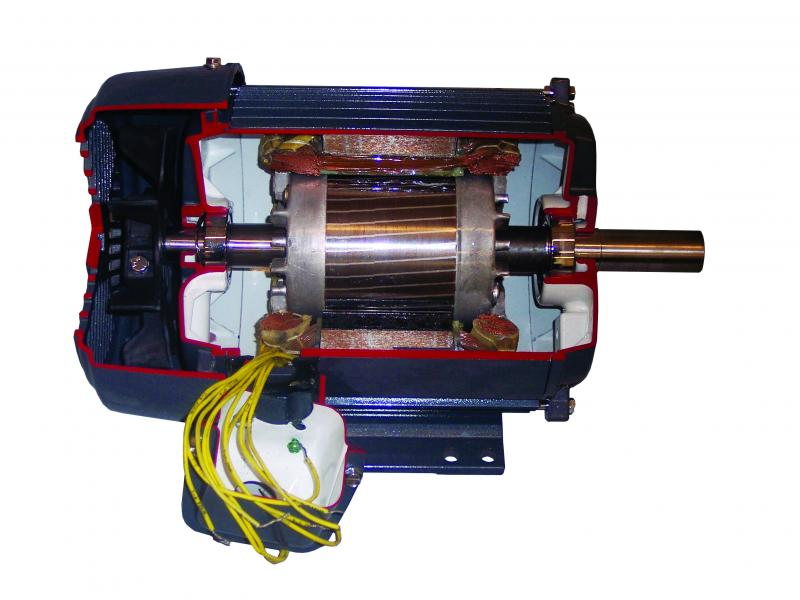
По способу создания движущегося магнитного поля, двигатели постоянного тока подразделяются на вентильные (бесколлекторные) и коллекторные. Бесколлекторные двигатели имеют в своей конструкции электронные инверторы, которые и осуществляют переключение фаз. Коллекторные же двигатели традиционно оснащены щеточно-коллекторными узлами, которые призваны чисто механически синхронизировать питание обмоток двигателя с вращением его движущихся частей.
Возбуждение коллекторных двигателей
Коллекторные двигатели по способу возбуждения бывают следующих видов: с независимым возбуждением от постоянных магнитов или от электромагнитов, либо с самовозбуждением. Двигатели с возбуждением от постоянных магнитов содержат магниты на роторе. Двигатели с самовозбуждением имеют на роторе специальную якорную обмотку, которая может быть включена параллельно, последовательно или смешано со специальной обмоткой возбуждения.
Двигатель пульсирующего тока
На двигатель постоянного тока похож двигатель пульсирующего тока. Отличие заключается в наличии шихтованных вставок на остове, а также дополнительных шихтованных полюсов. Кроме того, у двигателя пульсирующего тока имеется компенсационная обмотка. Применение такие двигатели находит в электровозах, где они обычно питается выпрямленным переменным током.
Двигатель переменного тока
Двигатели переменного тока, как ясно из названия, питаются током переменным. Бывают они синхронными и асинхронными.
У синхронных двигателей переменного тока магнитное поле статора движется с той же угловой скоростью, что и ротор, а у асинхронных всегда есть некое отставание (характеризующееся величиной скольжения s) — магнитное поле статора в своем движении как бы опережает ротор, который в свою очередь все время стремится его догнать.
Синхронные двигатели больших мощностей (мощностью в сотни киловатт) имеют на роторе обмотки возбуждения. Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Роторы менее мощных синхронных двигателей оснащены постоянными магнитами, которые и образуют полюса. Гистерезисные двигатели тоже в принципе относятся к синхронным.
Шаговые двигатели — это особая категория синхронных двигателей с высокой точностью управления скоростью вращения, вплоть до дискретного счета шагов.
Вентильные синхронные реактивные двигатели получают питание через инвертор.
Асинхронные двигатели переменного тока отличаются тем, что у них угловая скорость вращения ротора всегда меньше чем угловая скорость вращения магнитного поля статора. Асинхронные двигатели бывают однофазными (с пусковой обмоткой), двухфазными (к ним относится и конденсаторный двигатель), трехфазными и многофазными.
Универсальные коллекторные двигатели
Универсальный коллекторнй двигатель может работать хоть от постоянного, хоть от переменного тока (50 Гц). Имеет последовательное возбуждение, используется в бытовых электроприборах, где требуется скорость вращения более высокая чем максимальные для обычных двигателей переменного тока 3000 об/мин. Как правило, мощность таких двигателей не превышает 200 Вт. Встречается тиристорное управление скоростью вращения универсального двигателя.
Имеет последовательное возбуждение, используется в бытовых электроприборах, где требуется скорость вращения более высокая чем максимальные для обычных двигателей переменного тока 3000 об/мин. Как правило, мощность таких двигателей не превышает 200 Вт. Встречается тиристорное управление скоростью вращения универсального двигателя.
Усовершенствованная разновидность универсального двигателя — синхронный двигатель с датчиком положения ротора, где роль коллектора выполняет электронный инвертор.
Ранее ЭлектроВести писали, что американский стартап Malta получил $26 млн на создание системы хранения избыточной возобновляемой энергии в отдельных емкостях с расплавленной солью и жидкостью, подобной антифризу. Разработку поддержал фонд Breakthrough Energy Ventures, инвесторами которого являются Джефф Безос и Майкл Блумберг, а председателем Билл Гейтс.
По материалам: electrik.info.
Низковольтные асинхронные электродвигатели многополюсные по доступным ценам от «Электроресурс»
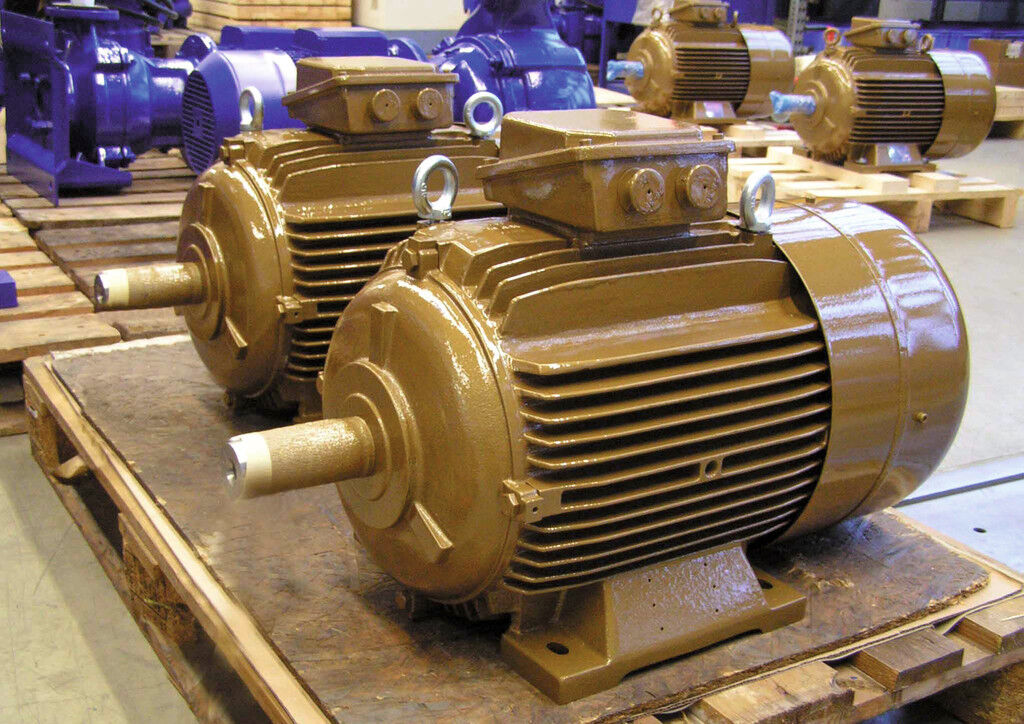
Предприятие «Электроресурс» занимается продажей различных видов продукции.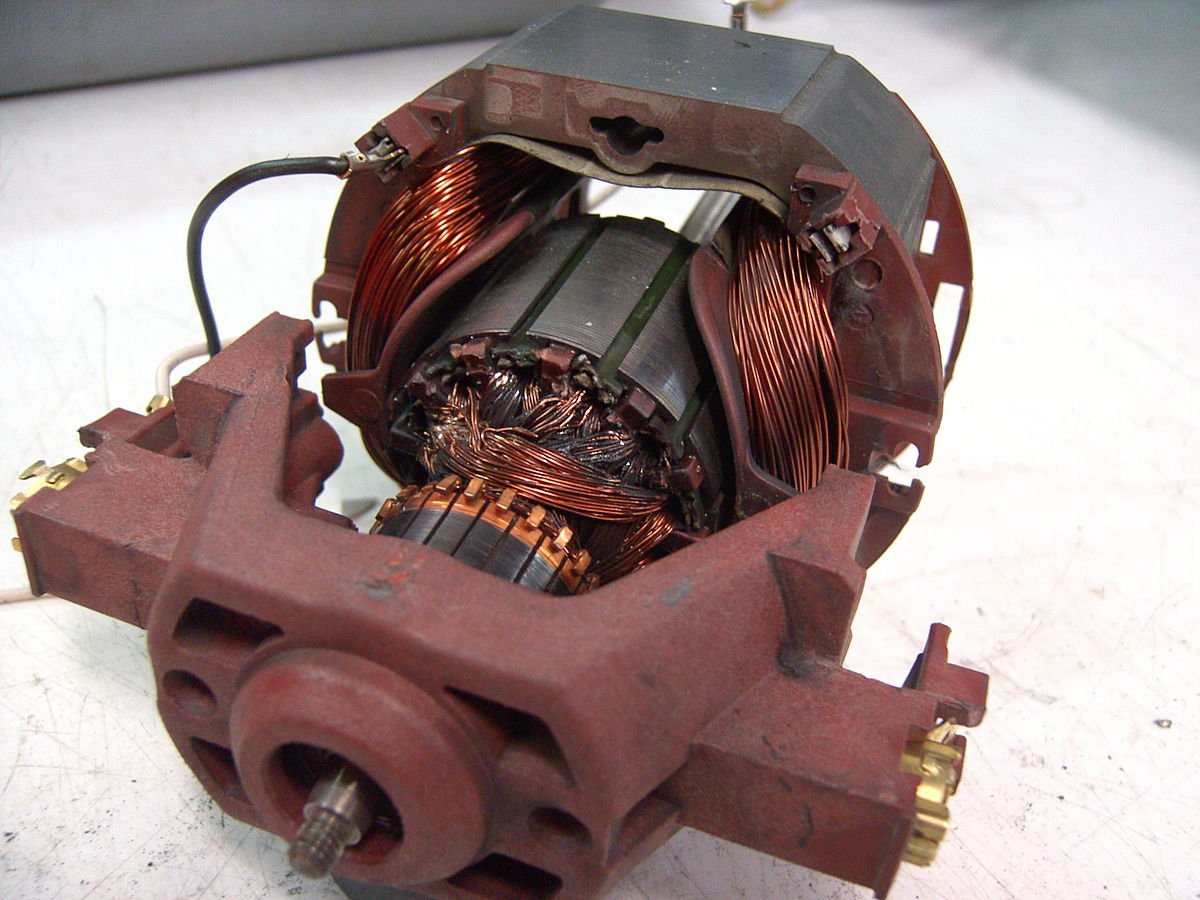 Ассортимент включает низковольтные асинхронные взрывозащищенные электродвигатели общепромышленного использования. Изделия создаются согласно существующим стандартам. Каждая из существующих линеек электродвигателей – это обширная номенклатура низковольтного оборудования. Отдельные варианты различаются по таким параметрам, как частота совершения вращательных движений, мощность, питающее напряжение, конструктивные особенности. Тот технический уровень, которого удалось достичь, а также достойное качество материалов и деталей, используемых в производственной деятельности, обеспечивают высокую надежность, эффективность и удобство использования готовых изделий.
Ассортимент включает низковольтные асинхронные взрывозащищенные электродвигатели общепромышленного использования. Изделия создаются согласно существующим стандартам. Каждая из существующих линеек электродвигателей – это обширная номенклатура низковольтного оборудования. Отдельные варианты различаются по таким параметрам, как частота совершения вращательных движений, мощность, питающее напряжение, конструктивные особенности. Тот технический уровень, которого удалось достичь, а также достойное качество материалов и деталей, используемых в производственной деятельности, обеспечивают высокую надежность, эффективность и удобство использования готовых изделий.
Мы производим и реализуем электромоторы совместно с деловыми партнерами. Сотрудничество c ОАО «ЭЛДИН» и ООО «ЭЛЕКТРОРЕСУРС» позволило производить особые многополюсные низковольтные электрические двигатели, относящиеся к серии ВАБ. Они были разработаны для оборудования воздушного охлаждения, чья мощность варьируется в пределах от 6,5 до 110 кВт, а частота вращения составляет 250-750 оборотов за минуту.
Базовые характеристики асинхронных низковольтных электродвигателей в стандартном исполнении:
- уровень шума: от 61 до 90 Гц;
- допустимые уровни звуковой мощности: от 77 до 87 Гц;
- высота вращения оси: от 160 до 450;
- допустимая температура окружающей среды: от -60 до +45ºС;
- класс нагревостойкости изоляции 155(F) согласно актуальным государственным стандаратам;
- класс изоляции 180(Н) по запросу.
Главные преимущества низковольтного асинхронного оборудования
- Регулярный мониторинг рынка, в котором функционирует компания, позволяет расширять номенклатуру.
- Стабильное повышение технического и экономического уровня производимых двигателей в зависимости от изменений, происходящих на рынке.
- Стабильность установочно-присоединительных параметров изделий, что позволяет использовать их для проведения замены оборудования, которое устарело, либо перестало функционировать в прежнем режиме.

- Удобство получения готовой продукции. При необходимости все технические характеристики низковольтных электродвигателей, а также расценки и условия поставки можно оговорить заблаговременно.
- Заключение официального договора с каждым клиентом.
- Выбор оптимального способа транспортировки электродвигателей находится в зависимости от заказанного товара. Специалисты выбирают подходящие средства и способ отгрузки.
- Все двигатели и другие виды оборудования поставляются со склада, располагающегося в Ярославле.
- На все виды электродвигателей оформлены сертификаты, есть разрешение на эксплуатацию во взрывоопасных районах.
- Наличие в штате квалифицированных специалистов с большим опытом, которые всегда готовы оказать техническую поддержку.
Разновидности асинхронных низковольтных электродвигателей
На выбор предлагаются различные комплектации:
- взрывозащитные электродвигатели;
- отличающиеся более высокой степенью безопасности;
- защищенные от воспламенения из-за взаимодействия с горючей пылью;
- дополненные тормозом и так далее.
Вы можете подобрать асинхронные электродвигатели, предназначенные для морского использования или для оснащения приводов прокатных станов.
Электрические показатели электродвигателей
Температурный класс Т4. Номинальные данные и мощности регламентированы для температуры окружающей среды 40°С. Превышение температуры по классу B.
| Типоразмер двигателя | Мощность (кВт) | Частота вращения (об/мин) | КПД (%) | Коэффициент мощности (о.с.) | Ток при 380 В (А) |
|---|---|---|---|---|---|
| 750 об/мин (синхронная частота вращения) | |||||
| с алюминиевой литой обмоткой ротора | |||||
| BA160SА8 | 4.0 | 730 | 84.0 | 0.71 | 10.2 |
| BA160SВ8 | 5.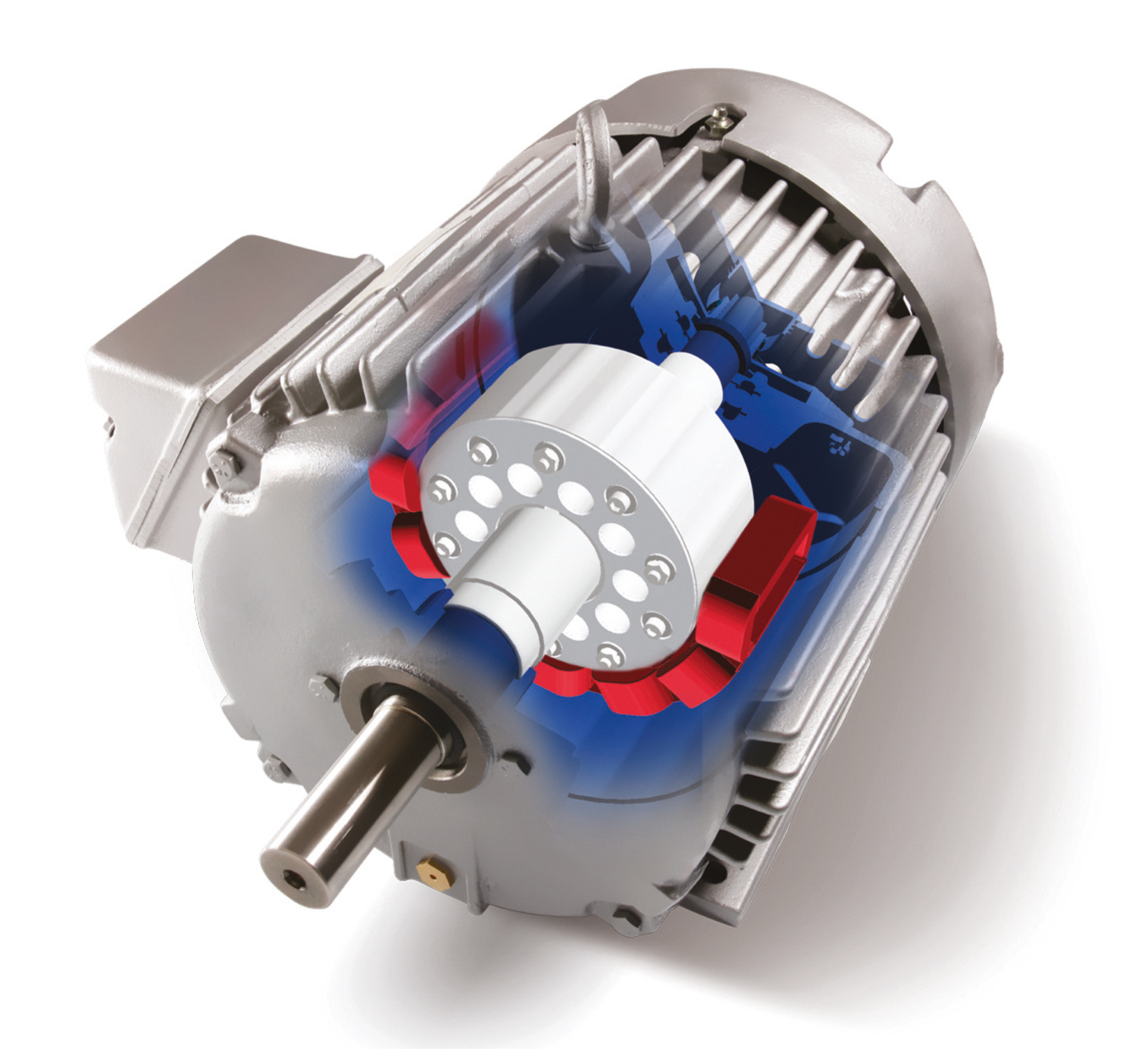 5 5 |
735 | 86.0 | 0.73 | 13.3 |
| BA160S8 | 7.5 | 730 | 86.0 | 0.75 | 17.7 |
| BA160М8 | 11.0 | 730 | 88.0 | 0.75 | 19.6 |
| ВАБ200SC8 | 9.0 | 730 | 88.5 | 0.80 | 19.3 |
| с медной стержневой обмоткой ротора | |||||
| ВАБ200SC8 | 9.0 | 740 | 90.3 | 0.80 | 18.9 |
| 500 об/мин (синхронная частота вращения) | |||||
| с алюминиевой литой обмоткой ротора | |||||
| ВАБ160S12 | 3. 0 0 |
480 | 83.0 | 0.75 | 7.3 |
| ВАБ160S12 | 5.5 | 481 | 80.8 | 0.72 | 14 |
| ВАБ180S12 | 6.0 | 483 | 81.7 | 0.71 | 16 |
| ВАБ180MA12 | 7.5 | 482 | 83.0 | 0.72 | 19 |
| ВАБ180MB12 | 9.0 | 480 | 83.5 | 0.72 | 23 |
| с медной стержневой обмоткой ротора | |||||
| ВАБ200SB12 | 6.5 | 488 | 85.1 | 0.71 | 16.3 |
| ВАБ200SC12 | 7.5 | 488 | 86.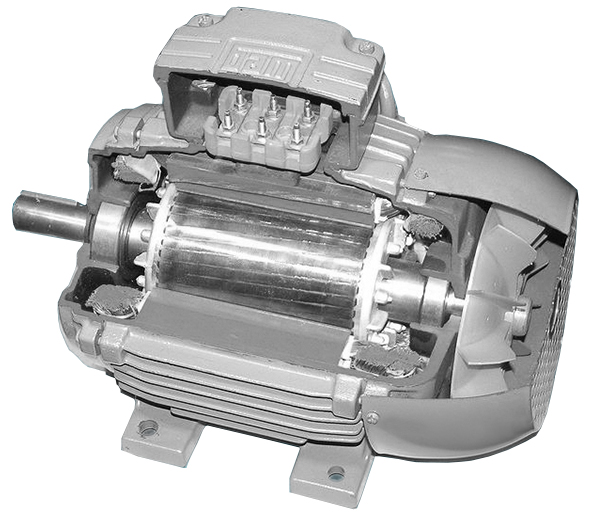 0 0 |
0.71 | 18.7 |
| ВАБ200MB12 | 9.0 | 489 | 86.3 | 0.70 | 22.6 |
| ВАБ200LB12 | 11.0 | 489 | 86.9 | 0.70 | 27.5 |
3-фазные низковольтные электродвигатели с короткозамкнутым ротором Класс изоляции F. Режим работы S1.
| В сети | |||||||
|---|---|---|---|---|---|---|---|
| Вид охлаждения | IC411 | ||||||
| Момент нагрузки | — | ||||||
| Частота | 50гц | ||||||
| Диапазон регулирования | — | ||||||
| Тип | P2H (кВт) | П2H (об/мин) | I1380В (А) | КПД (%) | Cos φ | MH (Нм) | Mмакс (Нм) |
| RA71A2 | 0. 37 37 |
2835 | 1.0 | 71.0 | 0.78 | 1.3 | 3.4 |
| RA71B2 | 0.55 | 2835 | 1.3 | 76.0 | 0.83 | 1.9 | 5.2 |
| RA80A2 | 0.75 | 2835 | 1.8 | 75.5 | 0.83 | 2.5 | 7.1 |
| RA80B2 | 1.1 | 2820 | 2.5 | 79.0 | 0.86 | 3.7 | 10.4 |
| RA90S2 | 1.5 | 2820 | 3.3 | 79.0 | 0.87 | 5.1 | 13.7 |
| RA90L2 | 2.2 | 2820 | 82. 0 0 |
0.87 | 0.80 | 7.5 | 23.1 |
| RA100L2 | 3.0 | 2805 | 6.5 | 82.0 | 0.86 | 10.2 | 32.7 |
| RA112M2 | 4.0 | 2865 | 8.1 | 85.0 | 0.88 | 13.3 | 48.0 |
| A71A2 | 0.75 | 2835 | 1.8 | 75.5 | 0.83 | 2.5 | 7.1 |
| A71B2 | 1.1 | 2820 | 2.5 | 79.0 | 0.86 | 3.7 | 10.4 |
| A80A2 | 1.5 | 2820 | 3.3 | 79.0 | 0. 87 87 |
5.1 | 13.7 |
| A80B2 | 2.2 | 2820 | 4.6 | 82.0 | 0.87 | 7.5 | 23.1 |
| A90L2 | 3.0 | 2805 | 6.5 | 82.0 | 0.86 | 10.2 | 32.7 |
| A100S2 | 4.0 | 2850 | 8.4 | 84.0 | 0.86 | 13.4 | 48.3 |
| A100L2 | 5.5 | 2890 | 11.0 | 87.0 | 0.87 | 18.2 | 61.8 |
| A112M2 | 7.5 | 2885 | 14.7 | 88.0 | 0.88 | 24.8 | 84. 4 4 |
| A132M2 | 11.0 | 2870 | 22 | 88.0 | 0.88 | 36.6 | 128 |
| АИР160S2 | 15.0 | 2940 | 30 | 89.0 | 0.86 | 48.7 | 156 |
| АИР160М2 | 18.5 | 2940 | 35 | 90.0 | 0.87 | 60.1 | 192 |
| АИР160S4 | 15.0 | 1460 | 29 | 89.0 | 0.87 | 98.1 | 284 |
| АИР160М4 | 18.5 | 1460 | 35 | 90.0 | 0.89 | 121 | 351 |
| АИР160S8 | 7. 5 5 |
730 | 18 | 85.0 | 0.73 | 98.1 | 235 |
| АИР160M8 | 11.0 | 730 | 26 | 87.0 | 0.75 | 144 | 346 |
Электродвигатели
Электродвигатели
- Подробности
- Категория: Электротехника
Электрические двигатели
В бытовой технике в основном применяют электродвигатели переменного тока двух видов: коллекторные (электробритва, швейная машина, пылесос, универсальная кухонная машина, электродрель и др.) и асинхронные (стиральная машина, холодильник).
Коллекторный электродвигатель является универсальным.
 Он может работать от постоянного и переменного токов. Принцип действия двигателя основан на взаимодействии проводника (якоря) с электрическим током и магнитным полем, создаваемым электромагнитом (индуктором). Механическая сила, возникающая при таком взаимодействии, заставляет вращаться якорь (ротор). Направление движения проводника с током определяется по правилу левой руки. Электрический двигатель с вращающимся валом был впервые сконструирован в 1834 г. русским физиком Б.С. Якоби (1801-1874).
Он может работать от постоянного и переменного токов. Принцип действия двигателя основан на взаимодействии проводника (якоря) с электрическим током и магнитным полем, создаваемым электромагнитом (индуктором). Механическая сила, возникающая при таком взаимодействии, заставляет вращаться якорь (ротор). Направление движения проводника с током определяется по правилу левой руки. Электрический двигатель с вращающимся валом был впервые сконструирован в 1834 г. русским физиком Б.С. Якоби (1801-1874).На рисунке ниже показано устройство коллекторного двигателя.
Станина и сердечник электромагнита двигателя переменного тока выполнена из листов электротехнической стали для уменьшения потерь энергии на нагревание сердечника. У двигателя постоянного тока эти детали в основном делают сплошными. Обмотка возбуждения электромагнита в двигателях переменного тока включается последовательно с обмоткой якоря. При таком соединении весь ток якоря проходит по обмотке возбуждения, обеспечивая большой пусковой момент двигателя.
Асинхронный двигатель не имеет коллектора и щеток, следовательно, в нем не возникает искра.
Принцип работы асинхронного двигателя основан на взаимодействии вращающегося магнитного поля с токами, которые наводятся этим полем в проводниках короткозамкнутого ротора. По закону Ленца в проводниках наводится ток такого направления, что своим магнитным полем препятствует причине, его создающей, т.е. тормозит вращающееся магнитное поле. Поскольку ротор укреплен в подшипниках, то он приходит в движение в направлении вращения поля. Скорость вращения ротора не совпадает со скоростью вращения магнитного поля статора, поэтому такие двигатели называются асинхронными. Отставание вращения ротора относительно магнитного поля статора называется скольжением. Оно составляет 3-6%.
При скорости вращения магнитного поля 3000 об/мин ротор вращается со скоростью 2800 об/мин. Если в статор двигателя уложено шесть обмоток (две пары полюсов), то поле статора вращается со скоростью 1500 об/мин, а ротор — со скоростью 1400 об/мин.
На рисунке ниже изображен асинхронный двигатель в разобранном виде.
Конструктивно асинхронный двигатель, как и всякая электрическая машина, состоит из двух основных частей: неподвижной части — статора и вращающейся части — ротора.
Статор имеет три обмотки, расположенные на кольцевом сердечнике и смещенные в пространстве на 120°, а ротор имеет обмотку в виде многих короткозамкнутых витков, уложенных на цилиндрическом сердечнике. Обмотка ротора без сердечника похожа на беличье колесо и называется коротко-замкнутой или обмоткой беличьего колеса. Она представляет собой стержни, замкнутые по торцам кольцами.
Асинхронные двигатели просты по устройству, надежны в работе. Они применяются во всех отраслях народного хозяйства. Из общего количества электродвигателей, изготавливаемых заводами, асинхронные двигатели составляют примерно 95%.
К недостаткам этих двигателей относятся: 1) невозможность получить постоянное и точное число оборотов на валу; 2) при пуске имеют большой ток; 3) чувствительны к колебаниям напряжения в сети.
Квартирная электропроводка является однофазной. Поэтому для использования трехфазного асинхронного двигателя в домашних условиях необходимо подключать дополнительно конденсаторы. На рис. справа показано включение трехфазного двигателя в однофазную сеть.
Недостатком этого способа подключения трехфазных двигателей в однофазную сеть является использование дорогостоящих бумажных конденсаторов большой емкости. Так, на каждые 100 Вт мощности нужен конденсатор емкостью 10 мкФ, рассчитанный на напряжение 250-450 В.
Наряду с трехфазными асинхронными двигателями применяются однофазные асинхронные двигатели. Эти двигатели имеют на статоре две обмотки: рабочую и пусковую. Обмотки расположены под углом 90° относительно друг друга. При включении в сеть обмоток образуется вращающееся магнитное поле и короткозамкнутый ротор приходит во вращение так же, как у трехфазного асинхронного двигателя. При этом появляется скольжение ротора и пусковая обмотка может быть отключена с помощью индукционного выключателя или специального реле.
Электродвигатели обладают большими преимуществами по сравнению с другими видами двигателей (паровыми, внутреннего сгорания): они экологичны—при работе не выделяют вредных газов, дыма или пара; экономичны — для них не нужен запас топлива и воды; их легко установить в любом доступном месте (на стене, под полом трамвая, троллейбуса, в корпусе игрушки и т. д.).
Для нужд народного хозяйства промышленность выпускает большое количество разнообразных электродвигателей: от миниатюрных, например для игрушек и моделей, до двигателей огромных размеров — для кораблей, электровозов. Электродвигатели различаются не только размерами, но и назначением, конструкцией, частотой вращения ротора.
На электротехнических предприятиях изготовлением электродвигателей занимаются рабочие разных профессий. Намотку катушек статора и ротора, соединение отдельных их частей осуществляют электромонтеры-обмотчики. Собирают электродвигатели слесари-сборщики. Они должны владеть навыками выполнения не только электромонтажных, но и слесарных работ.
Они должны владеть навыками выполнения не только электромонтажных, но и слесарных работ.
Электродвигатели. Общие сведения. – www.motors33.ru
Преобразование энергии в современных электродвигателях осуществляется посредством магнитного поля. Такие электродвигатели называются индуктивными. Возможно также создание электродвигателей, в которых энергия преобразуется посредством электрического поля (емкостные электродвигатели), однако такие двигатели существенного практического распространения не имеют. Это объясняется следующим.
В обоих классах двигателей взаимодействие между отдельными частями электродвигателя и преобразование энергии происходят через поле, существующее в среде, которая заполняет пространство между взаимодействующими частями электрической машины. Этой средой обычно является воздух или другое вещество с подобными же магнитными и электрическими свойствами. Однако при практически достижимых интенсивностях магнитного и электрического полей количество энергии в единице объема такой среды будет при магнитном поле в тысячи раз больше, чем при электрическом. Поэтому при одинаковых внешних размерах или габаритах электродвигателей обоих классов, индуктивные электродвигатели будут развивать значительно большую мощность.
Поэтому при одинаковых внешних размерах или габаритах электродвигателей обоих классов, индуктивные электродвигатели будут развивать значительно большую мощность.
Для получения по возможности более сильных магнитных полей применяются ферромагнитные сердечники, которые являются неотъемлемыми частями каждого электродвигателя. При переменных магнитных полях сердечники с целью ослабления вихревых токов и уменьшения вызываемых ими потерь энергии изготовляются из листовой электротехнической стали. Другими неотъемлемыми частями электродвигателя являются обмотки из проводниковых материалов, по которым протекают электрические токи. Для электрической изоляции обмоток применяются различные электроизоляционные материалы.
Как известно, электродвигатели тока обладают свойством обратимости: каждый электрический генератор может работать в качестве двигателя и наоборот, а в каждом трансформаторе и электромашинном преобразователе электрической энергии направление преобразования энергии может быть изменено на обратное.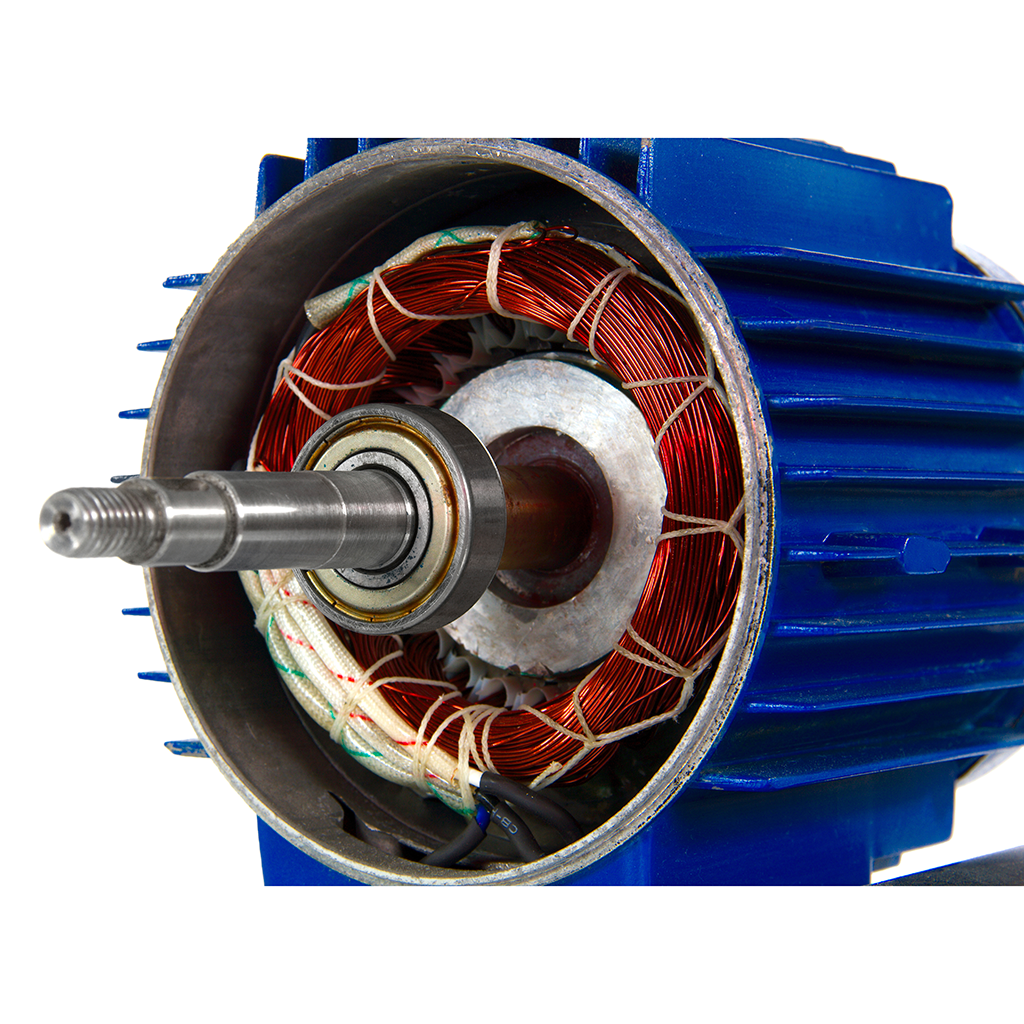 Однако каждая выпускаемая электромашиностроительным заводом вращающаяся машина обычно предназначается для одного, определенного режима работы, например, в качестве генератора или двигателя. Точно так же в трансформаторах одна из обмоток предусматривается для работы в качестве приемника электрической энергии (первичная обмотка), а другая (вторичная обмотка) — для отдачи энергии. При этом оказывается возможным наилучшим обра зом приспособить электродвигатель для заданных условий работы и добиться наилучшего использования материалов, т.е. получить наибольшую мощность на единицу в еса двигателя.
Однако каждая выпускаемая электромашиностроительным заводом вращающаяся машина обычно предназначается для одного, определенного режима работы, например, в качестве генератора или двигателя. Точно так же в трансформаторах одна из обмоток предусматривается для работы в качестве приемника электрической энергии (первичная обмотка), а другая (вторичная обмотка) — для отдачи энергии. При этом оказывается возможным наилучшим обра зом приспособить электродвигатель для заданных условий работы и добиться наилучшего использования материалов, т.е. получить наибольшую мощность на единицу в еса двигателя.
Преобразование энергии в электродвигателях неизбежно связано с ее потерями, вызванными перемагничиванием ферромагнитных сердечников, прохождением тока через проводники, трением в подшипниках и о воздух и т. д. Поэтому потребляемая мощность всегда больше отдаваемой, или полезной, мощности, а коэффициент полезного действия (КПД) меньше 100%.
Тем не менее, электродвигатели по сравнению с тепловыми и некоторыми другими типами машин, являются весьма совершенными преобразователями энергии с относительно высокими коэффициентами полезного действия. Так, в самых мощных электродвигателях КПД равен 98—99,5%, а в электродвигателях мощностью 10 вт. к. п. д. составляет 20—40%. Такие величины к. п. д. при столь малых мощностях во многих других типах электродвигателей недостижимы.
Так, в самых мощных электродвигателях КПД равен 98—99,5%, а в электродвигателях мощностью 10 вт. к. п. д. составляет 20—40%. Такие величины к. п. д. при столь малых мощностях во многих других типах электродвигателей недостижимы.
Высокие энергетические показатели электродвигателей , удобство подвода и отвода энергии, возможность выполнения на самые разнообразные мощности, скорости вращения, а также удобство обслуживания и простота управления обусловили повсеместное их широкое распространение.
Теряемая в электродвигателях энергия превращается в тепло и вызывает нагревание отдельных их частей. Для надежности работы и достижения приемлемого срока службы нагревание частей электродвигателей должно быть ограничено. Наиболее чувствительными в отношении нагревания являются электроизоляционные материалы, и именно их качеством определяются допустимые уровни нагревания электродвигателей . Большое значение имеет также создание хороших условий отвода тепла и охлаждения двигателей.
Потери энергии в электрической машине увеличиваются с повышением ее нагрузки, а вместе с этим увеличивается и нагревание машины. Поэтому наибольшая мощность нагрузки, допускаемая для данной машины, определяется главным образом допустимым уровнем ее нагревания, а также механической прочностью отдельных частей двигателя, условиями токосъема на скользящих контактах и т. д. Напряженность режима работы электродвигателей переменного тока в отношении электромагнитных нагрузок (величины магнитной индукции, плотности тока и т.д.), потерь энергии и нагревания определяется не активной, а полной мощностью, так как величина магнитного потока в машине определяется полным напряжением, а не его активной составляющей. Полезная мощность, на которую рассчитан электродвигатель, называется номинальной. Все другие величины, которые характеризуют работу двигателя при этой мощности, также называются номинальным. К ним относят ся: номинальные напряжение, ток, скорость вращения, к. п. д. и другие величины, а для двигателя переменного тока также номинальная частота и номинальный коэффициент мощности.
Поэтому наибольшая мощность нагрузки, допускаемая для данной машины, определяется главным образом допустимым уровнем ее нагревания, а также механической прочностью отдельных частей двигателя, условиями токосъема на скользящих контактах и т. д. Напряженность режима работы электродвигателей переменного тока в отношении электромагнитных нагрузок (величины магнитной индукции, плотности тока и т.д.), потерь энергии и нагревания определяется не активной, а полной мощностью, так как величина магнитного потока в машине определяется полным напряжением, а не его активной составляющей. Полезная мощность, на которую рассчитан электродвигатель, называется номинальной. Все другие величины, которые характеризуют работу двигателя при этой мощности, также называются номинальным. К ним относят ся: номинальные напряжение, ток, скорость вращения, к. п. д. и другие величины, а для двигателя переменного тока также номинальная частота и номинальный коэффициент мощности.
Основные номинальные величины указываются в паспортной табличке (на щитке), прикрепленной к двигателю. Принято, что для двигателя номинальная мощность является полезной мощностью на его валу, а для генератора — электрической мощностью, отдаваемой с его выходных зажимов. При этом для генераторов переменного тока дается либо полная, либо активная номинальная мощность (по последним стандартам — полная мощность). Для трансформаторов и некоторых других машин переменного тока в табличке всегда указывается полная номинальная мощность. Номинальные величины, методы испытаний электрических машин, а также другие их технико-экономические данные и требования регламентируются в России государственными стандартами (ГОСТ) на электродвигатели .
Принято, что для двигателя номинальная мощность является полезной мощностью на его валу, а для генератора — электрической мощностью, отдаваемой с его выходных зажимов. При этом для генераторов переменного тока дается либо полная, либо активная номинальная мощность (по последним стандартам — полная мощность). Для трансформаторов и некоторых других машин переменного тока в табличке всегда указывается полная номинальная мощность. Номинальные величины, методы испытаний электрических машин, а также другие их технико-экономические данные и требования регламентируются в России государственными стандартами (ГОСТ) на электродвигатели .
Номинальные напряжения электродвигателей согласованы в ГОСТ со стандартными номинальными напряжениями электрических сетей. Номинальные напряжения для электрических двигателей и первичных обмоток трансформаторов при этом берутся равными стандартным напряжениям электрических сетей, а для генераторов и вторичных обмоток трансформаторов — на 5—10% больше с целью компенсации падения напряжения в сетях. Наиболее употребительные номинальные напряжения электродвигателей следующие: для двигателей постоянного тока ПО, 220 и 440 в, для генераторов постоянного тока 115, 230 и 460 в, для двигателей переменного тока и первичных обмоток трансформаторов 220, 380, 660 б и 3, 6, 10 кв, для генераторов и вторичных обмоток трансформа торов 230, 400, 690 в и 3,15; 6,3; 10,5; 21 кв (для вторичных обмоток трансформаторов также 3,3; 6,6; 11 и 22 кв). Из более высоких напряжений для первичных обмоток трансфо рматоров стандартными являются 35, 110, 150, 220, 330, 500 и 750 кв и для вторичных обмоток 38,5; 121; 165; 242; 347; 525 и 787 кв.
Наиболее употребительные номинальные напряжения электродвигателей следующие: для двигателей постоянного тока ПО, 220 и 440 в, для генераторов постоянного тока 115, 230 и 460 в, для двигателей переменного тока и первичных обмоток трансформаторов 220, 380, 660 б и 3, 6, 10 кв, для генераторов и вторичных обмоток трансформа торов 230, 400, 690 в и 3,15; 6,3; 10,5; 21 кв (для вторичных обмоток трансформаторов также 3,3; 6,6; 11 и 22 кв). Из более высоких напряжений для первичных обмоток трансфо рматоров стандартными являются 35, 110, 150, 220, 330, 500 и 750 кв и для вторичных обмоток 38,5; 121; 165; 242; 347; 525 и 787 кв.
В России, а также в большинстве других стран мира промышленная частота тока равна 50 гц, и большинство асинхронных электродвигателей поэтому также строится на 50 гц. В США и других странах Америки промышленная частота тока равна 60 гц. Для разных специальных назначений (электротермические установки, устройства автоматики и др.) применяются также электродвигатели с другими значениями частоты тока.
По мощности электродвигатели можно подразделять на следующие группы: до 0,5 квт – электродвигатели весьма малой мощности, или микроэлектродвигатели, 0,5 – 20 квт – электродвигатели малой мощности, 20 – 250 электродвигатели средней мощности и более 250 квт — электродвигатели большой мощности. Эти границы между группами в определенной степени условны.
Асинхронные электродвигатели: схема, принцип работы и устройство
Асинхронный электродвигатель – это электрический агрегат с вращающимся ротором. Скорость вращения ротора отличается от скорости, с которой вращается магнитное поле статора. Это – одна из важных особенностей работы агрегата, так как если скорости выровняются, то магнитное поле не будет наводить в роторе ток и действие силы на роторную часть прекратится. Именно поэтому двигатель называется асинхронным (у синхронного показатели скоростного вращения совпадают).
В данной статье мы сфокусируемся на том, что представляет собой схема работы такого двигателя и – самое главное, насколько она эффективна при его эксплуатации.
Устройство и принцип действия
Ток в обмотках статора создает вращающееся магнитное поле. Это поле наводит в роторе ток, который начинает взаимодействовать с магнитным полем таким образом, что ротор начинает вращаться в ту же сторону, что и магнитное поле.
Относительная разность скоростей вращения ротора и частоты переменного магнитного поля называется скольжением. В установившемся режиме скольжение невелико: 1-8% в зависимости от мощности.
Асинхронный двигатель
Подробнее о принципах работы асинхронного электродвигателя – в частности, на примере агрегата трехфазного тока, вы можете прочесть здесь, на сайте, в одном из наших материалов. Далее же мы разберем, какие бывают разновидности асинхронных электрических машин.
Виды асинхронных двигателей
Можно выделить 3 базовых типа асинхронных электродвигателей:
- 1-фазный – с короткозамкнутым ротором
- 3-х фазный – с короткозамкнутым ротором
- 3-х фазный – с фазным ротором
Схема устройства асинхронного двигателя с короткозамкнутым ротором
То есть, двигатели классифицируются по количеству фаз (1 и 3) и по типу ротора – с короткозамкнутым и с фазным. При этом число фаз с установленным типом ротора никак не взаимосвязано.
При этом число фаз с установленным типом ротора никак не взаимосвязано.
Ещё одна разновидность – асинхронный двигатель с массивным ротором. Ротор сделан целиком из ферромагнитного материала и фактически представляет собой стальной цилиндр, играющий роль как магнитопровода, так и проводника (вместо обмотки). Такой вид двигателя очень прочный и обладает высоким пусковым моментом, однако в роторе могут возникать большие потери энергии, а сам он может сильно нагреваться.
Какой ротор лучше, фазный или короткозамкнутый?
Преимущества короткозамкнутого:
- Более-менее постоянная скорость вне зависимости от разных нагрузок
- Допустимость кратковременных механических перегрузок
- Простая конструкция, легкость пуска и автоматизации
- Более высокие cos φ (коэффициент мощности) и КПД, чем у электродвигателей с фазным ротором
Недостатки:
- Трудности в регулировании скорости вращения
- Большой пусковой ток
- Низкий мощностной коэффициент при недогрузках
Преимущества фазного:
- Высокий начальный вращающий момент
- Допустимость кратковременных механических перегрузок
- Более-менее постоянная скорость при разных перегрузках
- Меньший пусковой ток, чем у двигателей с короткозамкнутым ротором
- Возможность использования автоматических пусковых устройств
Недостатки:
- Большие габариты
- Коэффициент мощности и КПД ниже, чем у электродвигателей с короткозамкнутым ротором
Какой двигатель лучше выбрать?
Асинхронный или коллекторный? Синхронный или асинхронный? Сказать однозначно, что определенный тип двигателя лучше, точно нельзя. В пользу асинхронных моделей говорят их следующие преимущества.
В пользу асинхронных моделей говорят их следующие преимущества.
- Относительно небольшая стоимость
- Низкие эксплуатационные затраты
- Отсутствие необходимости в преобразователях при включении в сеть (только для нагрузок, не нуждающихся в регулировании скорости)
- Отсутствие потребности в дополнительном источнике питания – в отличие от синхронных аналогов
Тем не менее, у асинхроников есть недостатки. А именно:
- Малый пусковой момент
- Высокий пусковой ток
- Отсутствие возможности регулировки скорости при подключении к сети
- Ограничение максимальной скорости частотой сети
- Высокая зависимость электромагнитного момента от напряжения питающей сети
- Низкий мощностной коэффициент – в отличие от синхронных агрегатов
Тем не менее, все перечисленные недостатки можно устранить, если питать асинхронный двигатель от статического частотного преобразователя. Кроме того, если соблюдать правила эксплуатации и не перегружать агрегаты, то они исправно прослужат длительный срок.
Но даже несмотря на то, что синхронные машины обладают довольно конкурентными преимуществами, большинство двигателей сегодня – именно асинхронные. Промышленность, сельское хозяйство, ЖКХ и многие другие отрасли используют именно их за счет высокого КПД. Но коэффициент полезного действия может значительно снижаться за счет таких параметров, как:
- Высокий пусковой ток
- Слабый пусковой момент
- Рассинхрон между механическим моментом на валу привода и механической нагрузкой (это провоцирует высокий рост силы тока и избыточные нагрузки при запуске, а также снижение КПД при пониженной нагрузке)
- Невозможность точной регулировки скорости работы прибора
Другими факторами, от которых зависит КПД асинхронного электродвигателя, являются:
- степень загрузки двигателя по отношению к номинальной
- конструкция и модель
- степень износа
- отклонение напряжения в сети от номинального.
Как избежать снижения КПД?
- Обеспечение стабильного уровня загрузки – не ниже 75%
- Увеличение мощностного коэффициента
- Регулировать напряжение и частоту подаваемого тока
Для этого используются:
- Частотные преобразователи – они плавно изменяют скорость вращения двигателя путем изменения частоты питающего напряжения
- Устройства плавного пуска – они ограничивают скорость нарастания пускового тока и его предельное значение, как одни из факторов, из-за которых падает КПД
Итак, асинхронный двигатель имеет довольно широкую область использования и применяется во многих хозяйственных и производственных сферах деятельности.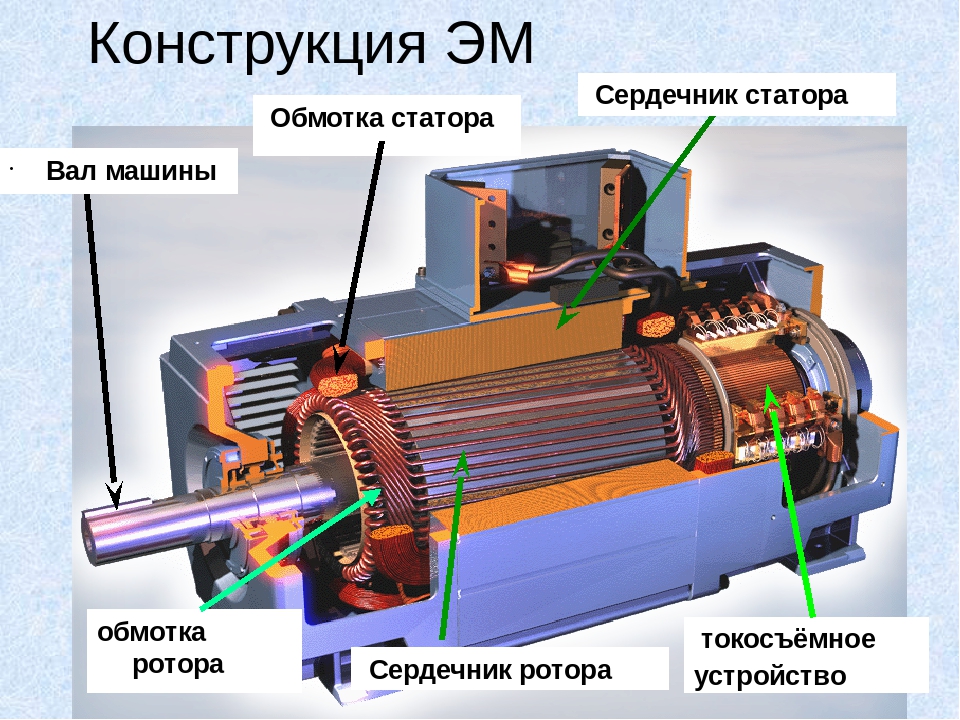 У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
У нас, в компании РУСЭЛТ, представлен широкий выбор электродвигателей данного типа, приобрести который вы можете по ценам, которые ощутимо выгоднее, чем у конкурентов.
Электродвигатели АИР
Электродвигатель АИР является ключевым звеном в механизме, обеспечивая его работоспособность. От того, какие характеристики предлагает двигатель, так будут действовать и все устройство в целом. Электродвигатели охватывают все сферы человеческой деятельности, в первую очередь, широко востребованы в промышленности.
Синхронный электродвигатель представляет собой устройство переменного тока. Частота вращения магнитного поля, которое создает якорь, равна частоте вращения ротора.
Асинхронный электродвигатель АИР представляет собой устройство, работающее за счет переменного тока, преобразуя электрическую энергию в механическую. В этом устройстве частота вращения ротора не равна частоте вращения магнитного поля. Бесперебойная и надежная работа асинхронного двигателя обеспечивается соблюдением необходимых условий: высота над уровнем моря, на которой работает двигатель, не должна превышать 1000 м; температура окружающей среды варьируется от -40 до +40 С; относительная влажность воздуха не должна превышать 90% (при температуре +25 С), запыленность воздуха для закрытых двигателей менее 10 мг/м3, 2 мг/м3 — для защищенных.
Для нестандартных условий производятся двигатели особого исполнения.
Взрывозащищенные асинхронные электродвигатели исключают возможность взрыва за счет заключения элементов двигателя, напрямую взаимодействующих с электричеством, в взрывонепроницаемую оболочку. Такая оболочка выдерживает давление взрыва внутри, не давая ему выйти в окружающую среду.
Общая схема маркировки электродвигателей
1. Обозначение серии:
АИР, А, 4А, 5А, АД, 7AVER — общепромышленные электродвигатели с привязкой мощностей по ГОСТ 51689-2000
АИС, 6А, IMM, RA, AIS — общепромышленные электродвигатели с привязкой мощностей по евростандарту DIN (CENELEC)
АИМ, АИМЛ, ВА, АВ, ВАО2, 1ВАО, 3В — взрывозащищенные электродвигатели
АИУ, ВРП, АВР, 3АВР, ВР — взрывозащищенные рудничные электродвигатели
А4, ДАЗО4, АОМ, ДАВ, АО4 — высоковольтные электродвигатели
2. Признак модификации:
Признак модификации:
М- модернизированный электродвигатель (например: АДМ63А2У3)
К- электродвигатель с фазным ротором (например: 5 АНК280А6)
Х- электродвигатель с алюминиевой станиной (например: 5АМХ180М2У3)
Е- однофазный электродвигатель 220В (например: АИРЕ80С2У3)
Н- электродвигатель защищенного исполнения с самовентиляцией (например: 5АН200М2У3)
Ф- электродвигатель защищенного исполнения с принудительным охлаждением
С- электродвигатель с повышенным скольжением (например: АИРС180М4У3)
В- встраиваемый электродвигатель (например: АДМВ63В2У3)
Р- электродвигатель с повышенным пусковым моментом (например: АИРР180S4У3)
П- электродвигатель для привода вентилятора в птицеводческих хозяйствах («птичник»)
3. Габарит (высота оси вращения вала над установочной поверхностью) мм.:
Габарит (высота оси вращения вала над установочной поверхностью) мм.:
50, 56, 63, 71, 80, 90, 100, 112, 132, 160, 180, 200, 225, 250, 280, 315, 355, 400
4. Установочные размеры или длина сердечника:
А, В — вариант длины сердечника
S, M, L — вариант длины сердечника и установочных размеров по длине станины
X, XK, Y, YK — вариант длины сердечника статора высоковольтных двигателей
5. Число полюсов:
2 (3000 об/мин), 4 (1500 об/мин), 6 (1000 об/мин), 8 (750 об/мин), 10 (600 об/мин), 12 (500 об/мин)
4/2, 6/4, 8/6, 12/4, 12/6, 6/4/2, 8/6/4 и т.д. — многоскоростные электродвигатели
6. Признак конструктивной модификации:
Б — электродвигатель со встроенным датчиком температурной защиты обмотки
Б1 — электродвигатель с датчиком температурной защиты обмотки и подшипниковых узлов
Б2 — электродвигатель с датчиком температурной защиты обмотки и подогревателем
Е — электродвигатель со встроенным электромагнитным тормозом (например: АИР80А2ЕУ3)
Е2 — электродвигатель со встроенным тормозом и ручкой расторможения
П — электродвигатель с повышенной точностью по установочным размерам
Ж — электтродвигатель для привода моноблочных насосов (например: АИР80А2ЖУ2)
Н — малошумный электродвигатель (например: 5АН180S4/16НЛБУХЛ4)
Л — электродвигатель для привода лифтов (например: 5АН180S4/16НЛБУХЛ4)
С — электродвигатель для привода нефтяных станков-качалок (например: АИР180S4СНУ1)
Тр — электродвигатель для осевых вентиляторов в системах охлаждения трансформаторов
Р3 — электродвигатель для мотор-редукторов
7. Климатическое исполнение (ГОСТ 15150-69)
Климатическое исполнение (ГОСТ 15150-69)
У — для макроклиматического района с умеренным климатом
УХЛ — для макроклиматических районов с умеренным и холодным климатом
ХЛ — для макроклиматического района с холодным климатом
Т — для макроклиматических районов как с сухим, так и с влажным тропическим климатом
М — для макроклиматического района района с умеренно-холодным морским климатом
О — для всех макроклиматических районов на суше, кроме очень холодного (общеклиматическое исполнение)
В — для всех макроклиматических районов на суше и на море, кроме очень холодного (всеклиматическое исполнение)
8. Категории размещения (ГОСТ 15150-69)
1- для эксплуатации на открытом воздухе
2- для эксплуатации под навесом, в палатках, кузовных прицепах
3— для эксплуатации в помещениях без регулируемых климатических условий
4— для эксплуатации в помещениях с искусственно регулируемыми климатическими условиями
5— для эксплуатации в помещениях с повышенной влажностью
Допустимые значения рабочих температур для основных климатических исполнений
| Климатическое исполнение | Категории размещения | Значение температуры воздуха при эксплуатации, С | |||
| Рабочее | Предельное рабочее | ||||
| верхнее | нижнее | верхнее | нижнее | ||
| У, ТУ | 1,2,3 | +40 | -45 | +45 | -45 |
| 5 | +35 | -5 | +35 | -5 | |
| УХЛ | 1,2,3 | +40 | -60 | +45 | -70 |
| 5 | +35 | -10 | +35 | -10 | |
| Т,ТС | 1,2,3 | +50 | -10 | +60 | -10 |
| 5 | +35 | +1 | +35 | +1 | |
Рабочие значения влажности воздуха для основных климатических исполнений
| Климатическое исполнение | Категория размещения | Относительная влажность |
Абс. среднегодовое значение, г*м3 |
|
| Среднегодовое значение | Верхнее значение | |||
| У, УХЛ, ХЛ, ТУ | 1, 2 | 75% при 15ºС | 100% при 25ºС | 11 |
| 3 | 75% при 15ºС | 98% при 25ºС | 11 | |
| Т, ТВ, О, М, ОМ | 5 | 90% при 15ºС | 100% при 25ºС | 13 |
| 1, 2, 5 | 80% при 27ºС | 100% при 35ºС | 20 | |
 влажность,
влажность,Монтажное исполнение IMxxxx
Монтажное исполнение электродвигателя АИР обозначается латинскими буквами IM и четырьмя цифрами после них. Также иногда встречается обозначение по международному стандарту МЭК60034-7 (код I), включающее латинские буквы IM, латинскую букву В или V и от 1 до 2 цифр.
Первая цифра — конструктивное исполнение электродвигателя
1— электродвигатель на лапах с подшипниковыми щитами
2— электродвигатель на лапах с подшипниковыми щитами и фланцем на одном щите
3— электродвигатель без лап с подшипниковыми щитами и фланцем на одном щите
Вторая и третья цифра — пространственный способ монтажа электродвигателя. Если третья цифра «8», например IM1081, то такой электродвигатель может монтироваться в любом положении.
Четвертая цифра — исполнение конца вала
1— электродвигатель с одним цилиндрическим концом вала
2— электродвигатель с двумя цилиндрическими концами вала
3— электродвигатель с одним коническим концом вала
4— электродвигатель с двумя коническими концами вала
Степень защиты IPxx (ГОСТ 17494-87)
Первая цифра — защита от проникновения твердых тел
0— незащищенный электродвигатель
1— электродвигатель, защищенный от твердых тел, диаметром более 50 мм
2— электродвигатель, защищенный от твердых тел, диаметром более 12 мм
3— электродвигатель, защищенный от твердых тел, диаметром более 2,5 мм
4— электродвигатель, защищенный от твердых тел, диаметром более 1,0 мм
5— электродвигатель, защищенный от пыли
Вторая цифра — защита от проникновения воды
0— незащищенный электродвигатель
1- электродвигатель, защищенный от вертикально капающей воды
2— электродвигатель, защищенный от падающих капель под углом до 15º к вертикали
3— электродвигатель, защищенный от падающих капель под углом до 60º к вертикали (от дождя)
4— электродвигатель, защищенный от воды, разбрызгиваемой со всех направлений
5- электродвигатель, защищенный от водяных струй со всех направлений.
Класс нагревостойкости изоляции
Электродвигатели, как правило, имеют класс нагревостойкости изоляция «В» (температурный индекс 135ºС), «F» (температурный индекс 155ºС) или «Н» (температурный индекс 180ºС) по ГОСТ 8865-70.
Класс нагревостойкости изоляции отражает максимальную рабочую температуру изоляции обмотки статора или ротора электродвигателя при номинальной нагрузке.
Номинальный режим работы электродвигателя
Определяет допустимую частоту и продолжительность включений электродвигателя, а также устанавливающийся при этих включениях температурный режим. ГОСТ 183-74 (МЭК 60034-1).
Напряжение и частота
При частоте тока 50Гц:
380, 660, 220/380, 380/660, 400/690 В
При частоте тока 60Гц:
440, 460, 240/415, 415/720 В
Также возможны иные значения частоты и напряжения, выполненные под заказ потребителя.
Для напряжений указанных через дробь справедлива схема соединения обмотки статора треугольник/звезда.
Схема подключения электродвигателей
Номинальные данные приводятся в соответствии с ГОСТ28173-89.
Электродвигатели АИР, расчитанные на напряжение 220/380В, должны подключаться при соединении обмоток в «звезду»на линейное напряжение 380В, а при соединении обмоток в «треугольник» на линейное напряжение 220В.
Аналогично, электродвигатели АИР, рассчитанные на напряжение 380/660В, должны подключаться при соединении обмоток в «звезду» на линейное напряжение 660В, а при соединении обмоток в «треугольник» на линейное напряжение 380В.
У электродвигателей, рассчитанных на напряжение 380В, обмотки по умолчанию соединены в «звезду» на линейное напряжение 380В.
Иное подключение обмоток приведет к выходу электродвигателя из строя и отказу завода-изготовителя от гарантийных обязательств по причине наличия «вины потребителя».
Что следует учитывать при выборе асинхронного электродвигателя
При выборе асинхронных электродвигателей переменного тока часто не учитываются требования к конструкции, которые связаны с их применением в составе того или иного оборудования. Также обычно имеет место подход, основанный на универсальности электродвигателя, и тогда выбор зависит только от его напряжения, мощности и скорости вращения ротора. Тем не менее есть еще целый ряд дополнительных аспектов для рассмотрения, таких как диапазон напряжения питания, сохранение номинальной мощности при изменении скорости вращения и область применения. Все это в итоге сводится к решению следующих вопросов: какова цель применения электродвигателя, как сделать все быстрее и эффективнее?
Базовые принципы выбора электродвигателя
Отправными точками для выбора асинхронного двигателя являются напряжение питания обмоток статора, создающего магнитное поле, а также номинальная мощность и скорость вращения ротора, которые соответствуют требованиям конкретного применения. Еще один, не менее важный момент — это необходимый вариант установки двигателя в приводе. Должен ли двигатель иметь крепление на основании, или он будет помещен на фланец на конце привода, или же должен предоставлять обе возможности? Кроме того, необходимо учитывать характеристики окружающей среды, в которой будет эксплуатироваться двигатель. При этом для выбора двигателя необходимо знать, потребуется ли ему работать под дождем и имеется ли вообще риск попадания на него воды, а также оценить уровень загрязнения и наличия пыли. Для эксплуатации в жестких условиях хорошо подходят электродвигатели закрытого типа с вентиляторным охлаждением (англ. totally enclosed fan cooled, TEFC) или электродвигатели закрытого типа без охлаждения (англ. totally enclosed non-vented, TENV). Если среда, в которой будет использоваться двигатель, не загрязнена и он будет эксплуатироваться без риска попадания на него воды, то в этом случае может быть достаточно применения каплезащищенного электродвигателя открытого исполнения (англ. open drip proof, ODP).
Выбор инвертора
Благодаря усилиям лоббистов местных энергетических компаний в сочетании с преимуществами, получаемыми при возможности регулирования скорости вращения ротора двигателей, все более распространенными становятся частотно-регулируемые приводы (ЧРП, англ. variable frequency drive, VFD). При их использовании особое внимание следует уделять генерации электромагнитных помех, которая характерна для таких приводов исходя из самой их природы. Для того чтобы электродвигатель мог использоваться с ЧРП, необходимо учитывать несколько технических особенностей, которым должен удовлетворять подходящий по остальным характеристикам электродвигатель. Среди них можно выделить две главные:
Максимально допустимое напряжение изоляции обмоточных проводов статора электродвигателя.
Электрическая прочность изоляции провода, из которого выполнена обмотка статора асинхронного электродвигателя, находится в пределах 1000–1600 В, но, как правило, в документации указывается значение прочности изоляции, равное 1200 В. Однако чем больше воздушный зазор между приводом и двигателем, тем, естественно, бо́льшим скачкам переходного напряжения, воздействующим на двигатель, он может противостоять. Электродвигатель, в котором для обмотки статора используется провод с электрической прочностью изоляции провода, равной 1600 В, может иметь ссылку на стандарт Национальной ассоциации производителей электрооборудования (NEMA, США) NEMA MG-1 2003, раздел 4, параграф 31, в котором говорится, что двигатель должен выдерживать без повреждений начальное напряжение коронного разряда (англ. corona inception voltage, CIV) уровнем до 1600 В.
Коэффициент сохранения постоянного крутящего момента (CT) двигателя, часто упоминается как «xx: 1 CT».
Этот показатель дает представление о диапазоне регулирования скорости. По нему можно узнать, насколько может быть снижена скорость вращения ротора двигателя, при которой он будет работать с сохранением того же крутящего момента (англ. CT — constant torque, постоянный крутящий момент), что и при номинальной скорости. Ниже этого значения крутящего момента производительность асинхронного электродвигателя снижается.
Например, возьмем электродвигатель мощностью 10 л. с. с начальной скоростью 1800 об/мин. При номинальной скорости (около 1800 об/мин), как указано, он имеет крутящий момент 29 фунтов на фут. Если в спецификации на электродвигатель написано, что коэффициент сохранения номинальной мощности составляет 10:1 CT, это означает, что такой электродвигатель может обеспечить номинальный крутящий момент до скорости 180 об/мин. Если же указано, что электродвигатель имеет коэффициент сохранения номинальной мощности 1000:1 CT, то имеется в виду, что крутящий момент сможет сохранять номинальное значение до скорости 1,8 об/мин.
При этом необходимо учитывать еще один нюанс, который связан с охлаждением электродвигателя. Нужно обязательно уточнить у поставщика, будет ли электродвигатель перегреваться при длительной работе на малых оборотах. Дело в том, что если двигатель охлаждается за счет крыльчатки, закрепленной на его валу, то на малых скоростях вы столкнетесь с низкой скоростью охлаждающего двигатель потока воздуха. Если асинхронный электродвигатель работает на низкой скорости и в течение длительного времени используется с большим крутящим моментом, то он будет выделять много тепла — при таких условиях, возможно, придется остановить свой выбор на двигателе с иным методом охлаждения.
Например, для организации принудительного охлаждения можно применить воздуходувное устройство, имеющее собственный, отдельно управляемый двигатель. Производительность такого устройства не связана с системой управления электропривода. В этом случае воздушный поток, который обдувает мощный электродвигатель, будет постоянным и достаточным для его охлаждения при низкой или даже при нулевой скорости.
Связь мощности и крутящего момента
При выборе асинхронного электродвигателя еще одним важным аспектом является номинальная, или основная, скорость двигателя. Обычно используются двухполюсные (3600 об/мин) и четырехполюсные (1800 об/мин) электродвигатели. Однако имеются и коммерчески доступные 6-, 8- и 12-полюсные асинхронные электродвигатели со скоростью вращения ротора 1200, 900
и 600 об/мин соответственно. Номинальная скорость асинхронного электродвигателя напрямую связана с числом полюсов, которые такой двигатель конструктивно содержит (табл.), и определяется по следующей формуле:
Об/мин = (120 × частота) / N (число полюсов)
В качестве примечания необходимо отметить, что, хотя прямой связи здесь нет, но, как правило, с увеличением количества полюсов возрастают и размеры, а также стоимость электропривода.
Кроме того, пользователям электроприводов, в зависимости от области применения данных устройств, может понадобиться обеспечить необходимый крутящий момент путем изменения скорости. В целом по мере увеличения скорости двигателя крутящий момент уменьшается, что также относится к редукторам и цепным приводам. Это соотношение объясняется следующим уравнением:
мощность (л. с.) = (крутящий момент × × номинальная скорость) / 5252
Крутящий момент, в соответствии с заданной целью, может быть достигнут путем выбора электродвигателя с необходимой мощностью и номинальной скоростью и реализован через любую цепную, ременную передачу или редуктор. Такой подход снижает стоимость привода, его габаритные размеры и время, уходящее на замену его подвижных заменяемых частей в ходе выполнения ремонта или технического обслуживания.
Число полюсов, N | Скорость, об/мин | Крутящий момент, |
2 | 3600 | 1,46 |
4 | 1800 | 2,92 |
6 | 1200 | 4,38 |
8 | 900 | 5,84 |
10 | 720 | 7,29 |
12 | 600 | 8,75 |
Примечание. Как правило, увеличение числа полюсов приводит к увеличению габаритов, а следовательно, и к повышению стоимости привода на основе асинхронного электродвигателя
Вконтакте
Google+
Как работают электродвигатели?
Криса Вудфорда. Последнее изменение: 25 июля 2020 г.
Щелкните выключателем и мгновенно получите власть — как любили наши предки электродвигатели! Вы можете найти их во всем, начиная с электропоезда с дистанционным управлением автомобили — и вы можете быть удивлены, насколько они распространены. Сколько электрических моторы сейчас есть в комнате с тобой? Наверное, два в вашем компьютере для начала, один круто ездить, а еще один питает охлаждающий вентилятор.Если вы сидите в спальне, вы найдете моторы в фенах и многих игрушки; в ванной — вытяжки и электробритвы; На кухне моторы есть практически во всех устройствах, от стиральных и посудомоечных машин до кофемолок, микроволновых печей и электрических консервных ножей. Электродвигатели зарекомендовали себя среди лучших изобретения всех времен. Давайте разберемся и узнаем, как они Работа!
Фото: Даже маленькие электродвигатели на удивление тяжелые.Это потому, что они набиты туго намотанной медью и тяжелыми магнитами. Это мотор от старой электрической газонокосилки. Вещь медного цвета в сторону В передней части оси с прорезями находится коммутатор, удерживающий двигатель. вращение в том же направлении (как объяснено ниже).
Как электромагнетизм заставляет двигатель двигаться?
Основная идея электродвигателя действительно проста: вы помещаете в него электричество с одного конца, а ось (металлический стержень) вращается на другом конце, давая вам возможность управлять машина какая то.Как это работает на практике? Как именно ваш преобразовать электричество в движение? Чтобы найти ответ на этот вопрос, у нас есть вернуться во времени почти на 200 лет.
Предположим, вы берете кусок обычного провода, превращаете его в большую петлю, и положите его между полюсами мощной постоянной подковы магнит. Теперь, если вы подключите два конца провода к батарее, провод будет прыгать кратко. Удивительно, когда видишь это впервые. Это прямо как по волшебству! Но есть совершенно научный объяснение.Когда электрический ток начинает течь по проводу, он создает магнитное поле вокруг него. Если разместить провод рядом с постоянным магнит, это временное магнитное поле взаимодействует с постоянным поле магнита. Вы знаете, что два магнита расположены рядом друг с другом. либо притягивать, либо отталкивать. Таким же образом временный магнетизм вокруг провода притягивает или отталкивает постоянный магнетизм от магнит, и это то, что заставляет проволоку подпрыгивать.
Правило левой руки Флеминга
Вы можете определить направление, в котором будет прыгать провод, используя удобная мнемоника (вспомогательная память), называемая правилом левой руки Флеминга (иногда называется Motor Rule).
Вытяните большой, указательный и второй пальцы левой руки.
рука так, чтобы все три были под прямым углом. Если вы укажете вторым пальцем
в направлении Течения
(который течет от положительного к положительному
отрицательная клемма АКБ), а Первая
палец в
направление поля (которое
течет с севера на южный полюс
магнит), ваш thuMb будет
показать направление, в котором провод
Движется.
Это …
- Первый палец = Поле
- SeCond палец = текущий
- ЧтМб = Движение
Несколько слов о текущем
Если вас смущает то, что я говорю, что ток течет от положительного к отрицательному, это просто историческая конвенция.Такие люди, как Бенджамин Франклин, помогавшие разобраться тайна электричества еще в 18 веке, считали, что это поток положительных зарядов, так что он перетекал с положительного на отрицательный. Мы называем эту идею условным током. и до сих пор используют его в таких вещах, как правило левой руки Флеминга. Теперь у нас есть лучшие идеи о том, как электричество работает, мы склонны говорить о токе как о потоке электронов от отрицательного к положительному в направлении , противоположном направлению обычного тока.Когда вы пытаетесь вычислить вращение двигателя или генератора, обязательно помните, что ток означает обычный ток , а не поток электронов.
Как работает электродвигатель — теоретически
Фото: Электрик ремонтирует электродвигатель. на борту авианосца. Блестящий металл, который он использует, может выглядеть как золото, но на самом деле это медь, хороший проводник, который намного дешевле. Фото Джейсона Якобовица любезно предоставлено ВМС США.
Связь между электричеством, магнетизмом и движением изначально была открыт в 1820 году французским физиком Андре-Мари Ампер (1775–1867), и это фундаментальная наука, лежащая в основе электродвигателя. Но если мы хотим превратить это удивительное научное открытие в более практическое Немного технологий для питания наших электрических косилок и зубных щеток, мы должны пойти немного дальше. Изобретателями, которые сделали это, были англичане Майкл Фарадей (1791–1867). и Уильям Стерджен (1783–1850) и американец Джозеф Генри (1797–1878).Вот как они пришли к своему гениальному изобретению.
Предположим, мы сгибаем нашу проволоку в квадратную U-образную петлю, так что эффективно два параллельных провода, проходящие через магнитное поле. Один из них отводит электрический ток от нас по проводам, а другой один возвращает ток обратно. Поскольку ток течет в в противоположных направлениях проводов, Правило левой руки Флеминга говорит нам о том, что два провода будут двигаться в противоположных направлениях. Другими словами, когда мы включите электричество, один из проводов двинется вверх и другой будет двигаться вниз.
Если бы катушка с проволокой могла продолжать двигаться вот так, она бы вращалась непрерывно — и мы будем на пути к созданию электрического мотор. Но этого не может произойти с нашей нынешней настройкой: провода будут быстро запутаться. Не только это, но если бы катушка могла вращаться далеко хватит, что-нибудь еще случится. Как только катушка достигла вертикали положение, он перевернется, и электрический ток будет течь через него в противоположном направлении. Теперь силы на каждого сторона катушки перевернется.Вместо непрерывного вращения в в том же направлении, он двинется назад в том же направлении, в котором только что пришел! Представьте себе электропоезд с таким двигателем: он будет держать перетасовки назад и вперед на месте, даже не идя в любом месте.
Как работает электродвигатель — на практике
Есть два способа решить эту проблему. Один из них — использовать своего рода электрический ток, который периодически меняет направление, что известно как переменный ток (AC). В виде небольших батарейных двигатели, которые мы используем дома, лучшее решение — добавить компонент назвал коммутатором концы катушки.(Не беспокойтесь о бессмысленных технических имя: это немного старомодное слово «коммутация» немного похоже на слово «добираться до работы». Это просто означает изменение взад и вперед в одном и том же путь, который ездит на работу, означает путешествовать туда и обратно.) В простейшей форме Коммутатор представляет собой металлическое кольцо, разделенное на две отдельные половины и его задача — реверсировать электрический ток в катушке каждый раз, когда катушка вращается на пол-оборота. Один конец катушки прикреплен к каждая половина коммутатора. Электрический ток от аккумулятора подключается к электрическим клеммам двигателя.Они подают электроэнергию в коммутатор через пару незакрепленных разъемы, называемые щетками, сделал либо из кусочков графита (мягкий уголь, похожий на карандаш «свинец») или тонкие отрезки упругого металла, который (как название предполагает) «задела» коммутатор. С коммутатор на месте, когда электричество течет по цепи, катушка будет постоянно вращаться в одном и том же направлении.
Художественное произведение: упрощенная схема деталей в электрическом мотор. Анимация: как это работает на практике.Обратите внимание, как коммутатор меняет направление тока каждый раз, когда катушка поворачивается. наполовину. Это означает, что сила с каждой стороны катушки всегда толкая в том же направлении, что позволяет катушке вращаться по часовой стрелке.
Такой простой экспериментальный двигатель, как этот, не может большая мощность. Мы можем увеличить усилие поворота (или крутящий момент) что мотор может творить тремя способами: либо у нас может быть больше мощный постоянный магнит, или мы можем увеличить электрический ток протекает через провод, или мы можем сделать катушку так, чтобы в ней было много «витки» (петли) очень тонкой проволоки вместо одного «витка» толстой проволоки.На практике двигатель также имеет постоянный магнит, изогнутый в круглой формы, так что он почти касается катушки с проволокой, которая вращается внутри него. Чем ближе друг к другу магнит и катушка, тем большее усилие, которое может создать двигатель.
Хотя мы описали несколько различных частей, вы можете представить двигатель как имеющий всего два основных компонента:
- По краю корпуса двигателя находится постоянный магнит (или магниты), который остается статичным, поэтому его называют статором двигателя.
- Внутри статора находится катушка, установленная на оси, которая вращается с высокой скоростью — и это называется ротором. Ротор также включает в себя коммутатор.
Универсальные двигатели
Такие двигатели постоянного токаотлично подходят для игрушек с батарейным питанием (таких как модели поездов, радиоуправляемые автомобили или электробритвы), но вы не найдете их во многих бытовых приборах. Мелкие бытовые приборы (например, кофемолки или электрические блендеры) обычно используют так называемые универсальные двигатели , которые могут питаться как от переменного, так и от постоянного тока.В отличие от простого двигателя постоянного тока, универсальный двигатель имеет электромагнит вместо постоянного магнита, и он получает питание от источника постоянного или переменного тока, который вы питаете:
- Когда вы питаетесь постоянным током, электромагнит работает как обычный постоянный магнит и создает магнитное поле, которое всегда направлено в одном направлении. Коммутатор меняет направление тока катушки каждый раз, когда катушка переворачивается, как в простом двигателе постоянного тока, поэтому катушка всегда вращается в одном и том же направлении.
- Однако, когда вы подаете переменный ток, ток, протекающий через электромагнит, и ток, протекающий через катушку , оба, , меняют направление, точно синхронно, поэтому сила, действующая на катушку, всегда в одном и том же направлении, а двигатель всегда вращается по часовой стрелке. или против часовой стрелки.А как насчет коммутатора? Частота тока изменяется намного быстрее, чем вращается двигатель, и, поскольку поле и ток всегда синхронизированы, на самом деле не имеет значения, в каком положении находится коммутатор в любой данный момент.
Анимация: Как работает универсальный двигатель: Электроснабжение питает как магнитное поле, так и вращающуюся катушку. С источником постоянного тока универсальный двигатель работает так же, как и обычный двигатель постоянного тока, как указано выше. При питании от сети переменного тока и магнитное поле, и ток катушки меняют направление каждый раз, когда ток питания меняется на противоположное.Это означает, что сила, действующая на катушку, всегда направлена в одну сторону.
Фото: Типичный универсальный двигатель: основные части двигателя среднего размера от кофемолки, которая может работать как от постоянного, так и от переменного тока. Серый электромагнит по краю — это статор (статическая часть), и он питается от катушек оранжевого цвета. Обратите внимание на прорези в коллекторе и прижимающиеся к нему угольные щетки, которые обеспечивают питание ротора (вращающейся части). Асинхронные двигатели в таких устройствах, как электрические железнодорожные поезда, во много раз больше и мощнее этого, и всегда работают с использованием переменного тока высокого напряжения (AC) вместо постоянного тока низкого напряжения (DC) или переменного тока умеренно низкого напряжения в домашних условиях. который приводит в действие универсальные двигатели.
Электродвигатели прочие
В простых двигателях постоянного тока и универсальных двигателях ротор вращается внутри статора. Ротор представляет собой катушку, подключенную к источнику электропитания, а статор представляет собой постоянный магнит или электромагнит. Большие двигатели переменного тока (используемые в таких вещах, как заводские машины) работают немного иначе: они пропускают переменный ток через противоположные пары магнитов, чтобы создать вращающееся магнитное поле, которое «индуцирует» (создает) магнитное поле в роторе двигателя, вызывая это вращаться.Подробнее об этом вы можете прочитать в нашей статье об асинхронных двигателях переменного тока. Если вы возьмете один из этих асинхронных двигателей и «развернете» его так, чтобы статор фактически превратился в длинную непрерывную дорожку, ротор может катиться по нему по прямой. Эта гениальная конструкция известна как линейный двигатель, и вы найдете ее в таких вещах, как заводские машины и плавучие железные дороги «маглев» (магнитная левитация).
Еще одна интересная конструкция — бесщеточный двигатель постоянного тока (BLDC). Статор и ротор эффективно меняются местами, при этом несколько железных катушек статичны в центре и постоянный магнит вращается вокруг них, а коммутатор и щетки заменяются электронной схемой.Вы можете прочитать больше в нашей основной статье о мотор-редукторах. Шаговые двигатели, которые вращаются на точно контролируемые углы, представляют собой разновидность бесщеточных двигателей постоянного тока.
Как работают электродвигатели?
Криса Вудфорда. Последнее изменение: 25 июля 2020 г.
Щелкните выключателем и мгновенно получите власть — как любили наши предки электродвигатели! Вы можете найти их во всем, начиная с электропоезда с дистанционным управлением автомобили — и вы можете быть удивлены, насколько они распространены.Сколько электрических моторы сейчас есть в комнате с тобой? Наверное, два в вашем компьютере для начала, один круто ездить, а еще один питает охлаждающий вентилятор. Если вы сидите в спальне, вы найдете моторы в фенах и многих игрушки; в ванной — вытяжки и электробритвы; На кухне моторы есть практически во всех устройствах, от стиральных и посудомоечных машин до кофемолок, микроволновых печей и электрических консервных ножей.Электродвигатели зарекомендовали себя среди лучших изобретения всех времен. Давайте разберемся и узнаем, как они Работа!
Фото: Даже маленькие электродвигатели на удивление тяжелые. Это потому, что они набиты туго намотанной медью и тяжелыми магнитами. Это мотор от старой электрической газонокосилки. Вещь медного цвета в сторону В передней части оси с прорезями находится коммутатор, удерживающий двигатель. вращение в том же направлении (как объяснено ниже).
Как электромагнетизм заставляет двигатель двигаться?
Основная идея электродвигателя действительно проста: вы помещаете в него электричество с одного конца, а ось (металлический стержень) вращается на другом конце, давая вам возможность управлять машина какая то. Как это работает на практике? Как именно ваш преобразовать электричество в движение? Чтобы найти ответ на этот вопрос, у нас есть вернуться во времени почти на 200 лет.
Предположим, вы берете кусок обычного провода, превращаете его в большую петлю, и положите его между полюсами мощной постоянной подковы магнит.Теперь, если вы подключите два конца провода к батарее, провод будет прыгать кратко. Удивительно, когда видишь это впервые. Это прямо как по волшебству! Но есть совершенно научный объяснение. Когда электрический ток начинает течь по проводу, он создает магнитное поле вокруг него. Если разместить провод рядом с постоянным магнит, это временное магнитное поле взаимодействует с постоянным поле магнита. Вы знаете, что два магнита расположены рядом друг с другом. либо притягивать, либо отталкивать.Таким же образом временный магнетизм вокруг провода притягивает или отталкивает постоянный магнетизм от магнит, и это то, что заставляет проволоку подпрыгивать.
Правило левой руки Флеминга
Вы можете определить направление, в котором будет прыгать провод, используя удобная мнемоника (вспомогательная память), называемая правилом левой руки Флеминга (иногда называется Motor Rule).
Вытяните большой, указательный и второй пальцы левой руки.
рука так, чтобы все три были под прямым углом.Если вы укажете вторым пальцем
в направлении Течения
(который течет от положительного к положительному
отрицательная клемма АКБ), а Первая
палец в
направление поля (которое
течет с севера на южный полюс
магнит), ваш thuMb будет
показать направление, в котором провод
Движется.
Это …
- Первый палец = Поле
- SeCond палец = текущий
- ЧтМб = Движение
Несколько слов о текущем
Если вас смущает то, что я говорю, что ток течет от положительного к отрицательному, это просто историческая конвенция.Такие люди, как Бенджамин Франклин, помогавшие разобраться тайна электричества еще в 18 веке, считали, что это поток положительных зарядов, так что он перетекал с положительного на отрицательный. Мы называем эту идею условным током. и до сих пор используют его в таких вещах, как правило левой руки Флеминга. Теперь у нас есть лучшие идеи о том, как электричество работает, мы склонны говорить о токе как о потоке электронов от отрицательного к положительному в направлении , противоположном направлению обычного тока.Когда вы пытаетесь вычислить вращение двигателя или генератора, обязательно помните, что ток означает обычный ток , а не поток электронов.
Как работает электродвигатель — теоретически
Фото: Электрик ремонтирует электродвигатель. на борту авианосца. Блестящий металл, который он использует, может выглядеть как золото, но на самом деле это медь, хороший проводник, который намного дешевле. Фото Джейсона Якобовица любезно предоставлено ВМС США.
Связь между электричеством, магнетизмом и движением изначально была открыт в 1820 году французским физиком Андре-Мари Ампер (1775–1867), и это фундаментальная наука, лежащая в основе электродвигателя. Но если мы хотим превратить это удивительное научное открытие в более практическое Немного технологий для питания наших электрических косилок и зубных щеток, мы должны пойти немного дальше. Изобретателями, которые сделали это, были англичане Майкл Фарадей (1791–1867). и Уильям Стерджен (1783–1850) и американец Джозеф Генри (1797–1878).Вот как они пришли к своему гениальному изобретению.
Предположим, мы сгибаем нашу проволоку в квадратную U-образную петлю, так что эффективно два параллельных провода, проходящие через магнитное поле. Один из них отводит электрический ток от нас по проводам, а другой один возвращает ток обратно. Поскольку ток течет в в противоположных направлениях проводов, Правило левой руки Флеминга говорит нам о том, что два провода будут двигаться в противоположных направлениях. Другими словами, когда мы включите электричество, один из проводов двинется вверх и другой будет двигаться вниз.
Если бы катушка с проволокой могла продолжать двигаться вот так, она бы вращалась непрерывно — и мы будем на пути к созданию электрического мотор. Но этого не может произойти с нашей нынешней настройкой: провода будут быстро запутаться. Не только это, но если бы катушка могла вращаться далеко хватит, что-нибудь еще случится. Как только катушка достигла вертикали положение, он перевернется, и электрический ток будет течь через него в противоположном направлении. Теперь силы на каждого сторона катушки перевернется.Вместо непрерывного вращения в в том же направлении, он двинется назад в том же направлении, в котором только что пришел! Представьте себе электропоезд с таким двигателем: он будет держать перетасовки назад и вперед на месте, даже не идя в любом месте.
Как работает электродвигатель — на практике
Есть два способа решить эту проблему. Один из них — использовать своего рода электрический ток, который периодически меняет направление, что известно как переменный ток (AC). В виде небольших батарейных двигатели, которые мы используем дома, лучшее решение — добавить компонент назвал коммутатором концы катушки.(Не беспокойтесь о бессмысленных технических имя: это немного старомодное слово «коммутация» немного похоже на слово «добираться до работы». Это просто означает изменение взад и вперед в одном и том же путь, который ездит на работу, означает путешествовать туда и обратно.) В простейшей форме Коммутатор представляет собой металлическое кольцо, разделенное на две отдельные половины и его задача — реверсировать электрический ток в катушке каждый раз, когда катушка вращается на пол-оборота. Один конец катушки прикреплен к каждая половина коммутатора. Электрический ток от аккумулятора подключается к электрическим клеммам двигателя.Они подают электроэнергию в коммутатор через пару незакрепленных разъемы, называемые щетками, сделал либо из кусочков графита (мягкий уголь, похожий на карандаш «свинец») или тонкие отрезки упругого металла, который (как название предполагает) «задела» коммутатор. С коммутатор на месте, когда электричество течет по цепи, катушка будет постоянно вращаться в одном и том же направлении.
Художественное произведение: упрощенная схема деталей в электрическом мотор. Анимация: как это работает на практике.Обратите внимание, как коммутатор меняет направление тока каждый раз, когда катушка поворачивается. наполовину. Это означает, что сила с каждой стороны катушки всегда толкая в том же направлении, что позволяет катушке вращаться по часовой стрелке.
Такой простой экспериментальный двигатель, как этот, не может большая мощность. Мы можем увеличить усилие поворота (или крутящий момент) что мотор может творить тремя способами: либо у нас может быть больше мощный постоянный магнит, или мы можем увеличить электрический ток протекает через провод, или мы можем сделать катушку так, чтобы в ней было много «витки» (петли) очень тонкой проволоки вместо одного «витка» толстой проволоки.На практике двигатель также имеет постоянный магнит, изогнутый в круглой формы, так что он почти касается катушки с проволокой, которая вращается внутри него. Чем ближе друг к другу магнит и катушка, тем большее усилие, которое может создать двигатель.
Хотя мы описали несколько различных частей, вы можете представить двигатель как имеющий всего два основных компонента:
- По краю корпуса двигателя находится постоянный магнит (или магниты), который остается статичным, поэтому его называют статором двигателя.
- Внутри статора находится катушка, установленная на оси, которая вращается с высокой скоростью — и это называется ротором. Ротор также включает в себя коммутатор.
Универсальные двигатели
Такие двигатели постоянного токаотлично подходят для игрушек с батарейным питанием (таких как модели поездов, радиоуправляемые автомобили или электробритвы), но вы не найдете их во многих бытовых приборах. Мелкие бытовые приборы (например, кофемолки или электрические блендеры) обычно используют так называемые универсальные двигатели , которые могут питаться как от переменного, так и от постоянного тока.В отличие от простого двигателя постоянного тока, универсальный двигатель имеет электромагнит вместо постоянного магнита, и он получает питание от источника постоянного или переменного тока, который вы питаете:
- Когда вы питаетесь постоянным током, электромагнит работает как обычный постоянный магнит и создает магнитное поле, которое всегда направлено в одном направлении. Коммутатор меняет направление тока катушки каждый раз, когда катушка переворачивается, как в простом двигателе постоянного тока, поэтому катушка всегда вращается в одном и том же направлении.
- Однако, когда вы подаете переменный ток, ток, протекающий через электромагнит, и ток, протекающий через катушку , оба, , меняют направление, точно синхронно, поэтому сила, действующая на катушку, всегда в одном и том же направлении, а двигатель всегда вращается по часовой стрелке. или против часовой стрелки.А как насчет коммутатора? Частота тока изменяется намного быстрее, чем вращается двигатель, и, поскольку поле и ток всегда синхронизированы, на самом деле не имеет значения, в каком положении находится коммутатор в любой данный момент.
Анимация: Как работает универсальный двигатель: Электроснабжение питает как магнитное поле, так и вращающуюся катушку. С источником постоянного тока универсальный двигатель работает так же, как и обычный двигатель постоянного тока, как указано выше. При питании от сети переменного тока и магнитное поле, и ток катушки меняют направление каждый раз, когда ток питания меняется на противоположное.Это означает, что сила, действующая на катушку, всегда направлена в одну сторону.
Фото: Типичный универсальный двигатель: основные части двигателя среднего размера от кофемолки, которая может работать как от постоянного, так и от переменного тока. Серый электромагнит по краю — это статор (статическая часть), и он питается от катушек оранжевого цвета. Обратите внимание на прорези в коллекторе и прижимающиеся к нему угольные щетки, которые обеспечивают питание ротора (вращающейся части). Асинхронные двигатели в таких устройствах, как электрические железнодорожные поезда, во много раз больше и мощнее этого, и всегда работают с использованием переменного тока высокого напряжения (AC) вместо постоянного тока низкого напряжения (DC) или переменного тока умеренно низкого напряжения в домашних условиях. который приводит в действие универсальные двигатели.
Электродвигатели прочие
В простых двигателях постоянного тока и универсальных двигателях ротор вращается внутри статора. Ротор представляет собой катушку, подключенную к источнику электропитания, а статор представляет собой постоянный магнит или электромагнит. Большие двигатели переменного тока (используемые в таких вещах, как заводские машины) работают немного иначе: они пропускают переменный ток через противоположные пары магнитов, чтобы создать вращающееся магнитное поле, которое «индуцирует» (создает) магнитное поле в роторе двигателя, вызывая это вращаться.Подробнее об этом вы можете прочитать в нашей статье об асинхронных двигателях переменного тока. Если вы возьмете один из этих асинхронных двигателей и «развернете» его так, чтобы статор фактически превратился в длинную непрерывную дорожку, ротор может катиться по нему по прямой. Эта гениальная конструкция известна как линейный двигатель, и вы найдете ее в таких вещах, как заводские машины и плавучие железные дороги «маглев» (магнитная левитация).
Еще одна интересная конструкция — бесщеточный двигатель постоянного тока (BLDC). Статор и ротор эффективно меняются местами, при этом несколько железных катушек статичны в центре и постоянный магнит вращается вокруг них, а коммутатор и щетки заменяются электронной схемой.Вы можете прочитать больше в нашей основной статье о мотор-редукторах. Шаговые двигатели, которые вращаются на точно контролируемые углы, представляют собой разновидность бесщеточных двигателей постоянного тока.
Как работают электродвигатели?
Криса Вудфорда. Последнее изменение: 25 июля 2020 г.
Щелкните выключателем и мгновенно получите власть — как любили наши предки электродвигатели! Вы можете найти их во всем, начиная с электропоезда с дистанционным управлением автомобили — и вы можете быть удивлены, насколько они распространены.Сколько электрических моторы сейчас есть в комнате с тобой? Наверное, два в вашем компьютере для начала, один круто ездить, а еще один питает охлаждающий вентилятор. Если вы сидите в спальне, вы найдете моторы в фенах и многих игрушки; в ванной — вытяжки и электробритвы; На кухне моторы есть практически во всех устройствах, от стиральных и посудомоечных машин до кофемолок, микроволновых печей и электрических консервных ножей.Электродвигатели зарекомендовали себя среди лучших изобретения всех времен. Давайте разберемся и узнаем, как они Работа!
Фото: Даже маленькие электродвигатели на удивление тяжелые. Это потому, что они набиты туго намотанной медью и тяжелыми магнитами. Это мотор от старой электрической газонокосилки. Вещь медного цвета в сторону В передней части оси с прорезями находится коммутатор, удерживающий двигатель. вращение в том же направлении (как объяснено ниже).
Как электромагнетизм заставляет двигатель двигаться?
Основная идея электродвигателя действительно проста: вы помещаете в него электричество с одного конца, а ось (металлический стержень) вращается на другом конце, давая вам возможность управлять машина какая то. Как это работает на практике? Как именно ваш преобразовать электричество в движение? Чтобы найти ответ на этот вопрос, у нас есть вернуться во времени почти на 200 лет.
Предположим, вы берете кусок обычного провода, превращаете его в большую петлю, и положите его между полюсами мощной постоянной подковы магнит.Теперь, если вы подключите два конца провода к батарее, провод будет прыгать кратко. Удивительно, когда видишь это впервые. Это прямо как по волшебству! Но есть совершенно научный объяснение. Когда электрический ток начинает течь по проводу, он создает магнитное поле вокруг него. Если разместить провод рядом с постоянным магнит, это временное магнитное поле взаимодействует с постоянным поле магнита. Вы знаете, что два магнита расположены рядом друг с другом. либо притягивать, либо отталкивать.Таким же образом временный магнетизм вокруг провода притягивает или отталкивает постоянный магнетизм от магнит, и это то, что заставляет проволоку подпрыгивать.
Правило левой руки Флеминга
Вы можете определить направление, в котором будет прыгать провод, используя удобная мнемоника (вспомогательная память), называемая правилом левой руки Флеминга (иногда называется Motor Rule).
Вытяните большой, указательный и второй пальцы левой руки.
рука так, чтобы все три были под прямым углом.Если вы укажете вторым пальцем
в направлении Течения
(который течет от положительного к положительному
отрицательная клемма АКБ), а Первая
палец в
направление поля (которое
течет с севера на южный полюс
магнит), ваш thuMb будет
показать направление, в котором провод
Движется.
Это …
- Первый палец = Поле
- SeCond палец = текущий
- ЧтМб = Движение
Несколько слов о текущем
Если вас смущает то, что я говорю, что ток течет от положительного к отрицательному, это просто историческая конвенция.Такие люди, как Бенджамин Франклин, помогавшие разобраться тайна электричества еще в 18 веке, считали, что это поток положительных зарядов, так что он перетекал с положительного на отрицательный. Мы называем эту идею условным током. и до сих пор используют его в таких вещах, как правило левой руки Флеминга. Теперь у нас есть лучшие идеи о том, как электричество работает, мы склонны говорить о токе как о потоке электронов от отрицательного к положительному в направлении , противоположном направлению обычного тока.Когда вы пытаетесь вычислить вращение двигателя или генератора, обязательно помните, что ток означает обычный ток , а не поток электронов.
Как работает электродвигатель — теоретически
Фото: Электрик ремонтирует электродвигатель. на борту авианосца. Блестящий металл, который он использует, может выглядеть как золото, но на самом деле это медь, хороший проводник, который намного дешевле. Фото Джейсона Якобовица любезно предоставлено ВМС США.
Связь между электричеством, магнетизмом и движением изначально была открыт в 1820 году французским физиком Андре-Мари Ампер (1775–1867), и это фундаментальная наука, лежащая в основе электродвигателя. Но если мы хотим превратить это удивительное научное открытие в более практическое Немного технологий для питания наших электрических косилок и зубных щеток, мы должны пойти немного дальше. Изобретателями, которые сделали это, были англичане Майкл Фарадей (1791–1867). и Уильям Стерджен (1783–1850) и американец Джозеф Генри (1797–1878).Вот как они пришли к своему гениальному изобретению.
Предположим, мы сгибаем нашу проволоку в квадратную U-образную петлю, так что эффективно два параллельных провода, проходящие через магнитное поле. Один из них отводит электрический ток от нас по проводам, а другой один возвращает ток обратно. Поскольку ток течет в в противоположных направлениях проводов, Правило левой руки Флеминга говорит нам о том, что два провода будут двигаться в противоположных направлениях. Другими словами, когда мы включите электричество, один из проводов двинется вверх и другой будет двигаться вниз.
Если бы катушка с проволокой могла продолжать двигаться вот так, она бы вращалась непрерывно — и мы будем на пути к созданию электрического мотор. Но этого не может произойти с нашей нынешней настройкой: провода будут быстро запутаться. Не только это, но если бы катушка могла вращаться далеко хватит, что-нибудь еще случится. Как только катушка достигла вертикали положение, он перевернется, и электрический ток будет течь через него в противоположном направлении. Теперь силы на каждого сторона катушки перевернется.Вместо непрерывного вращения в в том же направлении, он двинется назад в том же направлении, в котором только что пришел! Представьте себе электропоезд с таким двигателем: он будет держать перетасовки назад и вперед на месте, даже не идя в любом месте.
Как работает электродвигатель — на практике
Есть два способа решить эту проблему. Один из них — использовать своего рода электрический ток, который периодически меняет направление, что известно как переменный ток (AC). В виде небольших батарейных двигатели, которые мы используем дома, лучшее решение — добавить компонент назвал коммутатором концы катушки.(Не беспокойтесь о бессмысленных технических имя: это немного старомодное слово «коммутация» немного похоже на слово «добираться до работы». Это просто означает изменение взад и вперед в одном и том же путь, который ездит на работу, означает путешествовать туда и обратно.) В простейшей форме Коммутатор представляет собой металлическое кольцо, разделенное на две отдельные половины и его задача — реверсировать электрический ток в катушке каждый раз, когда катушка вращается на пол-оборота. Один конец катушки прикреплен к каждая половина коммутатора. Электрический ток от аккумулятора подключается к электрическим клеммам двигателя.Они подают электроэнергию в коммутатор через пару незакрепленных разъемы, называемые щетками, сделал либо из кусочков графита (мягкий уголь, похожий на карандаш «свинец») или тонкие отрезки упругого металла, который (как название предполагает) «задела» коммутатор. С коммутатор на месте, когда электричество течет по цепи, катушка будет постоянно вращаться в одном и том же направлении.
Художественное произведение: упрощенная схема деталей в электрическом мотор. Анимация: как это работает на практике.Обратите внимание, как коммутатор меняет направление тока каждый раз, когда катушка поворачивается. наполовину. Это означает, что сила с каждой стороны катушки всегда толкая в том же направлении, что позволяет катушке вращаться по часовой стрелке.
Такой простой экспериментальный двигатель, как этот, не может большая мощность. Мы можем увеличить усилие поворота (или крутящий момент) что мотор может творить тремя способами: либо у нас может быть больше мощный постоянный магнит, или мы можем увеличить электрический ток протекает через провод, или мы можем сделать катушку так, чтобы в ней было много «витки» (петли) очень тонкой проволоки вместо одного «витка» толстой проволоки.На практике двигатель также имеет постоянный магнит, изогнутый в круглой формы, так что он почти касается катушки с проволокой, которая вращается внутри него. Чем ближе друг к другу магнит и катушка, тем большее усилие, которое может создать двигатель.
Хотя мы описали несколько различных частей, вы можете представить двигатель как имеющий всего два основных компонента:
- По краю корпуса двигателя находится постоянный магнит (или магниты), который остается статичным, поэтому его называют статором двигателя.
- Внутри статора находится катушка, установленная на оси, которая вращается с высокой скоростью — и это называется ротором. Ротор также включает в себя коммутатор.
Универсальные двигатели
Такие двигатели постоянного токаотлично подходят для игрушек с батарейным питанием (таких как модели поездов, радиоуправляемые автомобили или электробритвы), но вы не найдете их во многих бытовых приборах. Мелкие бытовые приборы (например, кофемолки или электрические блендеры) обычно используют так называемые универсальные двигатели , которые могут питаться как от переменного, так и от постоянного тока.В отличие от простого двигателя постоянного тока, универсальный двигатель имеет электромагнит вместо постоянного магнита, и он получает питание от источника постоянного или переменного тока, который вы питаете:
- Когда вы питаетесь постоянным током, электромагнит работает как обычный постоянный магнит и создает магнитное поле, которое всегда направлено в одном направлении. Коммутатор меняет направление тока катушки каждый раз, когда катушка переворачивается, как в простом двигателе постоянного тока, поэтому катушка всегда вращается в одном и том же направлении.
- Однако, когда вы подаете переменный ток, ток, протекающий через электромагнит, и ток, протекающий через катушку , оба, , меняют направление, точно синхронно, поэтому сила, действующая на катушку, всегда в одном и том же направлении, а двигатель всегда вращается по часовой стрелке. или против часовой стрелки.А как насчет коммутатора? Частота тока изменяется намного быстрее, чем вращается двигатель, и, поскольку поле и ток всегда синхронизированы, на самом деле не имеет значения, в каком положении находится коммутатор в любой данный момент.
Анимация: Как работает универсальный двигатель: Электроснабжение питает как магнитное поле, так и вращающуюся катушку. С источником постоянного тока универсальный двигатель работает так же, как и обычный двигатель постоянного тока, как указано выше. При питании от сети переменного тока и магнитное поле, и ток катушки меняют направление каждый раз, когда ток питания меняется на противоположное.Это означает, что сила, действующая на катушку, всегда направлена в одну сторону.
Фото: Типичный универсальный двигатель: основные части двигателя среднего размера от кофемолки, которая может работать как от постоянного, так и от переменного тока. Серый электромагнит по краю — это статор (статическая часть), и он питается от катушек оранжевого цвета. Обратите внимание на прорези в коллекторе и прижимающиеся к нему угольные щетки, которые обеспечивают питание ротора (вращающейся части). Асинхронные двигатели в таких устройствах, как электрические железнодорожные поезда, во много раз больше и мощнее этого, и всегда работают с использованием переменного тока высокого напряжения (AC) вместо постоянного тока низкого напряжения (DC) или переменного тока умеренно низкого напряжения в домашних условиях. который приводит в действие универсальные двигатели.
Электродвигатели прочие
В простых двигателях постоянного тока и универсальных двигателях ротор вращается внутри статора. Ротор представляет собой катушку, подключенную к источнику электропитания, а статор представляет собой постоянный магнит или электромагнит. Большие двигатели переменного тока (используемые в таких вещах, как заводские машины) работают немного иначе: они пропускают переменный ток через противоположные пары магнитов, чтобы создать вращающееся магнитное поле, которое «индуцирует» (создает) магнитное поле в роторе двигателя, вызывая это вращаться.Подробнее об этом вы можете прочитать в нашей статье об асинхронных двигателях переменного тока. Если вы возьмете один из этих асинхронных двигателей и «развернете» его так, чтобы статор фактически превратился в длинную непрерывную дорожку, ротор может катиться по нему по прямой. Эта гениальная конструкция известна как линейный двигатель, и вы найдете ее в таких вещах, как заводские машины и плавучие железные дороги «маглев» (магнитная левитация).
Еще одна интересная конструкция — бесщеточный двигатель постоянного тока (BLDC). Статор и ротор эффективно меняются местами, при этом несколько железных катушек статичны в центре и постоянный магнит вращается вокруг них, а коммутатор и щетки заменяются электронной схемой.Вы можете прочитать больше в нашей основной статье о мотор-редукторах. Шаговые двигатели, которые вращаются на точно контролируемые углы, представляют собой разновидность бесщеточных двигателей постоянного тока.
Все о моторах | Конструкция машины
На первый взгляд моторы кажутся сложными машинами, и на самом деле так оно и есть. Но принцип работы электромагнетизма относительно прост, понятен даже старшеклассникам. Помимо различий, современные моторные технологии очень похожи и вполне понятны.
Происхождение первых двигателей — машин, преобразующих электрическую энергию в механическую — можно проследить до конструкций, разработанных Майклом Фарадеем. В 1831 году Фарадей сформулировал фундаментальные концепции электромагнитной индукции, отметив, что проводник с током в магнитном поле видит силу, пропорциональную напряженности поля и току, проходящему через него.
Конструкция электродвигателя, как тогда, так и сейчас, основана на размещении проводников в магнитном поле.Проводники, конечно, имеют форму обмоток с множеством витков провода, каждый из которых вносит свой вклад в интенсивность электромагнитного воздействия. Фарадей указал, что чем больше сила тока, тем большую силу (крутящий момент) можно ожидать. Таким образом, движение, конечная цель, является результатом притяжения друг к другу двух магнитных полей (одно на роторе, другое на статоре). Эта концепция является основой всех конструкций двигателей постоянного и переменного тока и отправной точкой для современной инженерии движения.
ABC’S ac
Двигатели переменного тока — наиболее широко используемые двигатели в мире.По сути, это устройства с постоянной скоростью, определяемой числом магнитных полюсов и входной частотой. В целом существует два типа двигателей переменного тока — асинхронные и синхронные.
Асинхронные двигатели можно рассматривать как тип трансформатора, первичная обмотка которого соответствует статору, а вторичная — ротору. Подача напряжения на «первичную обмотку» делает две вещи: проталкивает ток через статор, вызывая ток в роторе. Другими словами, он создает магнитное поле в статоре, создавая второе поле на роторе.Взаимодействие этих двух полей заставляет ротор двигаться.
Скорость магнитного поля вокруг статора определяет скорость ротора. Ротор будет пытаться следовать за полем статора, но будет «проскальзывать», особенно при приложении нагрузки. Поэтому асинхронные двигатели всегда работают медленнее, чем вращающееся поле статора.
Статор асинхронного двигателя состоит из стальных пластин и витков медной проволоки. С другой стороны, ротор обычно изготавливается из многослойных пластин с большими прорезями на периферии.В роторе с короткозамкнутым ротором щели заполнены медными или алюминиевыми стержнями, закороченными токопроводящими торцевыми крышками. Эта «цельная» отливка обычно включает встроенные лопасти вентилятора для циркуляции воздуха для охлаждения.
Стандартные асинхронные двигатели работают с «постоянной» скоростью, определяемой стандартной частотой сети. Однако есть способы контролировать скорость. Приводы на основе микропроцессоров, использующие технологию векторного управления, например, манипулируют величиной магнитного потока в полях ротора и статора, достигая своего рода отклика на переменное скольжение.При наличии соответствующего датчика обратной связи этот метод управления применим даже в приложениях для позиционирования.
Хотя об очень сложных задачах, таких как быстрое позиционирование старт-стоп, не может быть и речи, некоторые приложения индексации, тем не менее, выполнимы. Однако ограничивающим фактором является тепло. По мере увеличения размера двигателя, чтобы контролировать температуру — более крупные двигатели лучше охлаждаются — отношение крутящего момента к моменту инерции становится недопустимым для скорости.
Преимущества асинхронных двигателей хорошо известны, включая низкую начальную стоимость, доступность стандартных размеров, надежность и бесшумную работу без вибрации.
Синхронные двигатели аналогичны асинхронным двигателям, но отличаются в основном конструкцией ротора. Роторы предназначены для вращения с той же скоростью, что и поле статора, отсюда и название «синхронный». В основном существует два типа синхронных двигателей: с самовозбуждением (например, асинхронные двигатели) и с прямым возбуждением с использованием постоянных магнитов.
Самовозбуждающиеся синхронные двигатели (иногда называемые реактивными синхронными двигателями) используют ротор с выемками или зубьями на периферии.Количество выемок соответствует количеству полюсов статора. Часто выемки или зубцы называют «выступающими полюсами», что отражает тот факт, что они создают легкий путь, почти ручку, для поля магнитного потока, тем самым позволяя ротору блокироваться и работать с той же скоростью, что и вращающееся поле.
Синхронные двигатели с прямым возбуждением (иногда называемые гистерезисными синхронными двигателями или синхронными двигателями с постоянными магнитами переменного тока) используют ротор из сплава с постоянным магнитом. Постоянные полюса, по сути, являются «выступающими полюсами» и, следовательно, предотвращают скольжение.
Продолжить на странице 2
Важным фактором для синхронных двигателей является «угол сцепления», то есть небольшое расстояние, на которое ротор отстает от поля статора. Этот угол увеличивается с нагрузкой, и если нагрузка превышает возможности двигателя, ротор увязнет, в конечном итоге выйдя из синхронизма.
Синхронные двигатели обычно работают в разомкнутом контуре, обеспечивая абсолютную постоянную скорость для заданной нагрузки в пределах угла сцепления или крутящего момента «отрыва».Однако двигатели не являются самозапускающимися, им требуются конденсаторные или пусковые обмотки с расщепленной фазой (или специальные средства управления), которые постепенно увеличивают частоту и напряжение, чтобы ротор двигался.
Синхронные двигатели могут использоваться для управления скоростью с добавлением устройства обратной связи. Они также приспособлены для борьбы с переносчиками болезней. Однако в целом ротор больше, чем у эквивалентного серводвигателя, что означает более медленный отклик для возрастающих приложений.
Типы постоянного тока
Существует много типов двигателей постоянного тока — щеточные и бесщеточные, шаговые, с параллельной обмоткой и с последовательной обмоткой — но все они имеют одну общую черту: простое управление скоростью.Это делает их естественным выбором для сервоприводов позиционирования и регулирования скорости.
Двигатели с параллельной обмоткой имеют параллельные обмотки ротора и статора. Статор может подключаться к тому же источнику питания, что и ротор, или он может возбуждаться индивидуально. При отдельных источниках питания напряжение ротора можно изменять — относительно постоянного напряжения статора — для регулировки скорости.
Параллельное или параллельное соединение между ротором и статором обеспечивает относительно ровную кривую скорость-крутящий момент с хорошим регулированием скорости в широком диапазоне нагрузок.Однако из-за размагничивания двигателям постоянного тока с параллельной обмоткой не хватает пускового момента, как у других типов обмоток постоянного тока.
Двигатели с последовательной обмоткой соединяют обмотки ротора и статора последовательно. Это создает два сильных поля, создающих высокий пусковой крутящий момент. Типичные области применения включают краны и подъемники; Избегайте применения, когда двигатель может потерять нагрузку и «разлететься»
Электродвигатели с композитной обмоткой , напротив, используют как параллельное, так и последовательное соединение.Соотношение между полями ротора и статора определяет форму кривой скорость-крутящий момент. Как правило, малые составные двигатели имеют сильное шунтирующее поле и слабое последовательное поле, что приводит к высокому пусковому моменту и относительно ровной характеристике скорости-момента. Применение реверсирования в некоторой степени непрактично, поскольку необходимо переключать полярность обеих обмоток, что требует больших силовых цепей.
Занять позицию
Для позиционирования требуются специальные двигатели. Шаговый, вектор переменного тока, сервопривод постоянного тока и бесщеточный постоянный и переменный ток являются одними из наиболее распространенных вариантов.
Шаговые двигатели — это электромеханические устройства, которые преобразуют цифровые входы (с помощью контроллера) в аналоговое движение. Хотя существует много типов — с активированным соленоидом, с переменным сопротивлением, постоянным магнитом и синхронной индукцией — все они индексируются с фиксированными угловыми приращениями при запрограммированном включении. Другими словами, шаговый двигатель выполняет не непрерывное движение, а серию дискретных угловых движений одинаковой величины.
Шаговые двигателиособенно хорошо подходят для приложений, в которых управляющие сигналы появляются в виде последовательности импульсов.Один импульс заставляет двигатель увеличивать один угол движения; десять импульсов равны десяти шагам и так далее.
В большинстве шаговых двигателей используется разомкнутый контур, который, к сожалению, вызывает колебания. Для отверждения обычно требуется сложная схема «замыкающего контура» или устройство обратной связи. Даже при этом шаговые двигатели ограничены примерно 1 л.с. и 2000 об / мин.
Принцип работы разомкнутой системы лучше всего проиллюстрировать на примере. Предположим, что в приложении для сортировки контейнеров используется шаговый двигатель.Все идет так, как ожидалось, пока двигатель может отключиться на одно приращение за импульс. Но если механизм заклинивает и шаговый двигатель не может двигаться, контроллер может не знать о проблеме и будет продолжать посылать импульсы, которые по сути игнорируются. Нетрудно представить, что в конечном итоге, если система теряет слишком много шагов, она может помещать в одну корзину предметы, которые на самом деле предназначены для другой.
Двигатели постоянного тока с постоянными магнитами (PMDC) — популярный выбор для приложений с инкрементом (старт-стоп).И при соответствующей обратной связи они весьма эффективны в сервоуправлении с обратной связью.
Магнитный двигатель двигателя с постоянным постоянным током состоит из поля статора, исходящего от постоянных магнитов, и поля ротора, индуцированного током, проходящим через коммутатор или схему переключения в узел ротора. Поле статора неподвижно, а поле ротора движется. Каждый раз, когда два поля почти выравниваются, коммутатор переключает ток ротора. Пока поле ротора не догоняет поле статора, ротор будет продолжать движение.Скорость вращения, как быстро вращается ротор, зависит от силы поля ротора; чем больше напряжение, тем быстрее вращается ротор.
Продолжить на странице 3
ДвигателиPMDC имеют линейные кривые скорость-крутящий момент с относительно высоким пусковым (ускоряющим) крутящим моментом. Линейность обязана постоянным магнитам; поток, создающий крутящий момент в поле статора, остается постоянным на всех скоростях. Двигатели с постоянным постоянным током «фунт за фунт» довольно мощные, они подходят для приложений быстрого позиционирования.
Бесщеточные сервоприводы могут быть постоянного или переменного тока в зависимости от устройства обратной связи и схемы управления. Например, с датчиками Холла трехфазный бесщеточный двигатель обычно запитывает две из трех обмоток двигателя одновременно. Чтобы совершить один механический оборот, контроллер должен последовательно пройти шесть секций коммутации, подавая на каждую из них постоянное напряжение. Величина постоянного тока прямо пропорциональна рабочей скорости, отсюда и термин «бесщеточный постоянный ток».
Обратная связь энкодера используется в приложениях, требующих данных о местоположении.Некоторые энкодеры доступны с выходами Холла, которые используются для коммутации.
Обратная связь резольвератакже предоставляет данные о положении, но метод управления отличается. Здесь синусоидальная форма волны применяется к обмоткам двигателя, что дает начало термину «бесщеточный переменный ток». Преимущество перед бесщеточным двигателем постоянного тока заключается в том, что при одинаковом крутящем моменте бесщеточный двигатель переменного тока потребляет меньший ток. Поэтому контроллер обычно меньше и дешевле. Этого следовало ожидать, когда трехфазная обмотка запитана трехфазным синусоидальным током.
Бесщеточные двигатели быстрые, вырабатывают большой крутящий момент в небольшом корпусе и имеют небольшую инерцию, что приводит к более быстрому ускорению. Они также хороши на низких скоростях (вплоть до нулевой скорости) и обеспечивают длительный и надежный срок службы без обслуживания в сложных приложениях.
Джон Мазуркевич — директор по разработке двигателей Baldor Electric Co., Ft. Смит, Арк.
Статьи по теме
Муфты электромагнитные
С учетом электромагнитных задержек
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе.Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Британская энциклопедия, Inc.Принцип работы асинхронного двигателя может быть разработан, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений цикла. Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки.В момент t 1 на чертеже ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т. Е. Одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как в фазе b и фазе a составляет половину значения. положительный.Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени. Поле совершает один оборот за один цикл токов статора. Таким образом, объединенный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчасВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников. Поскольку проводники ротора закорочены друг с другом на каждом конце, в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника.На этом рисунке показана диаграмма токов ротора за момент времени t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (то есть вращающий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается.Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Британская энциклопедия, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле в присутствии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Полный ток статора в каждой фазной обмотке складывается из синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электрической мощности. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже полевой скорости (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты путем создания машины с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
Электродвигатель | Британника
Самый простой тип асинхронного двигателя показан на рисунке в разрезе. Трехфазный набор обмоток статора вставлен в пазы в железе статора. Эти обмотки могут быть подключены по схеме «звезда», обычно без внешнего подключения к нейтральной точке, или по схеме «треугольник». Ротор состоит из цилиндрического стального сердечника с проводниками, размещенными в пазах по всей поверхности. В наиболее обычной форме эти проводники ротора соединены вместе на каждом конце ротора токопроводящим концевым кольцом.
Поперечное сечение трехфазного асинхронного двигателя.
Британская энциклопедия, Inc.Принцип работы асинхронного двигателя может быть разработан, сначала предположив, что обмотки статора подключены к трехфазному источнику питания и что набор из трех синусоидальных токов, показанных на рисунке, протекает в обмотках статора. На этом рисунке показано влияние этих токов на создание магнитного поля через воздушный зазор машины в течение шести мгновений цикла.Для простоты показана только центральная токопроводящая петля для каждой фазной обмотки. В момент t 1 на чертеже ток в фазе a является максимально положительным, тогда как ток в фазах b и c составляет половину отрицательного значения. Результатом является магнитное поле с приблизительно синусоидальным распределением вокруг воздушного зазора с максимальным значением наружу вверху и максимальным значением внутрь внизу. В момент времени t 2 на рисунке (т.е.е., одна шестая цикла позже), ток в фазе c является максимально отрицательным, в то время как ток в фазе b и фазе a имеет положительное значение на половину. Результатом, как показано на рисунке для t 2 , снова является синусоидально распределенное магнитное поле, но повернутое на 60 ° против часовой стрелки. Исследование распределения тока для t 3 , t 4 , t 5 и t 6 показывает, что магнитное поле продолжает вращаться с течением времени.Поле совершает один оборот за один цикл токов статора. Таким образом, объединенный эффект трех равных синусоидальных токов, равномерно смещенных во времени и протекающих в трех обмотках статора, равномерно смещенных в угловом положении, должен создать вращающееся магнитное поле с постоянной величиной и механической угловой скоростью, которая зависит от частоты электроснабжение.
Получите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчасВращательное движение магнитного поля относительно проводников ротора вызывает индуцирование напряжения в каждом из них, пропорциональное величине и скорости поля относительно проводников.Поскольку проводники ротора закорочены друг с другом на каждом конце, в этих проводниках будут протекать токи. В простейшем режиме работы эти токи будут примерно равны индуцированному напряжению, деленному на сопротивление проводника. На этом рисунке показана диаграмма токов ротора за момент времени t 1 рисунка. Видно, что токи приблизительно синусоидально распределены по периферии ротора и расположены так, чтобы создавать вращающий момент против часовой стрелки на роторе (т.е.е. крутящий момент в том же направлении, что и вращение поля). Этот крутящий момент ускоряет ротор и вращает механическую нагрузку. По мере увеличения скорости вращения ротора его скорость относительно скорости вращающегося поля уменьшается. Таким образом, индуцированное напряжение уменьшается, что приводит к пропорциональному уменьшению тока в проводнике ротора и крутящего момента. Скорость ротора достигает постоянного значения, когда крутящий момент, создаваемый токами ротора, равен крутящему моменту, необходимому на этой скорости для нагрузки, без избыточного крутящего момента, доступного для ускорения объединенной инерции нагрузки и двигателя.
Вращающееся поле и токи, которые оно создает в короткозамкнутых проводниках ротора.
Британская энциклопедия, Inc.Механическая выходная мощность должна обеспечиваться входной электрической мощностью. Первоначальных токов статора, показанных на рисунке, достаточно для создания вращающегося магнитного поля. Чтобы поддерживать это вращающееся поле в присутствии токов ротора, показанных на рисунке, необходимо, чтобы обмотки статора несли дополнительную составляющую синусоидального тока такой величины и фазы, чтобы нейтрализовать влияние магнитного поля, которое в противном случае могло бы возникнуть. токами ротора на рисунке.Полный ток статора в каждой фазной обмотке складывается из синусоидальной составляющей, создающей магнитное поле, и другой синусоиды, опережающей первую на четверть цикла, или 90 °, для обеспечения необходимой электрической мощности. Вторая, или силовая, составляющая тока находится в фазе с напряжением, приложенным к статору, в то время как первая, или намагничивающая, составляющая отстает от приложенного напряжения на четверть цикла или 90 °. При номинальной нагрузке эта намагничивающая составляющая обычно находится в диапазоне 0.От 4 до 0,6 величины силовой составляющей.
Большинство трехфазных асинхронных двигателей работают с обмотками статора, подключенными непосредственно к трехфазному источнику питания постоянного напряжения и постоянной частоты. Типичные напряжения питания находятся в диапазоне от 230 вольт между фазами для двигателей относительно небольшой мощности (например, от 0,5 до 50 киловатт) до примерно 15 киловольт между фазами для двигателей большой мощности до примерно 10 мегаватт.
За исключением небольшого падения напряжения на сопротивлении обмотки статора, напряжение питания согласуется со скоростью изменения магнитного потока в статоре машины во времени.Таким образом, при питании с постоянной частотой и постоянным напряжением величина вращающегося магнитного поля остается постоянной, а крутящий момент примерно пропорционален силовой составляющей тока питания.
В асинхронном двигателе, показанном на предыдущих рисунках, магнитное поле совершает один оборот за каждый цикл частоты питания. Для источника с частотой 60 Гц скорость поля составляет 60 оборотов в секунду или 3600 оборотов в минуту. Скорость ротора меньше скорости поля на величину, достаточную для того, чтобы индуцировать необходимое напряжение в проводниках ротора для создания тока ротора, необходимого для момента нагрузки.При полной нагрузке скорость обычно на 0,5–5 процентов ниже полевой скорости (часто называемой синхронной скоростью), причем более высокий процент применяется к двигателям меньшего размера. Эта разница в скорости часто называется скольжением.
Другие синхронные скорости могут быть получены с источником постоянной частоты путем создания машины с большим количеством пар магнитных полюсов, в отличие от двухполюсной конструкции, показанной на рисунке. Возможные значения скорости магнитного поля в оборотах в минуту: 120 f / p , где f — частота в герцах (циклов в секунду), а p — количество полюсов (которое должно быть четное число).Данный железный каркас может быть намотан для любого из нескольких возможных количеств пар полюсов с помощью катушек, охватывающих угол приблизительно (360/ p ) °. Крутящий момент, доступный от рамы машины, останется неизменным, поскольку он пропорционален произведению магнитного поля и допустимого тока катушки. Таким образом, номинальная мощность рамы, являющаяся произведением крутящего момента и скорости, будет примерно обратно пропорциональна количеству пар полюсов. Наиболее распространенные синхронные скорости для двигателей с частотой 60 Гц — 1800 и 1200 оборотов в минуту.
Факты об электродвигателях для детей
Электродвигатель преобразует электрическую энергию в механическое движение. Динамо-машина или электрический генератор делают обратное: они превращают механическое движение в электрическую энергию. Большинство электродвигателей работают за счет силы магнетизма. Также использовались электростатические двигатели.
Машины, использующие электродвигатели, включают: вентиляторы, стиральные машины, холодильники, насосы и пылесосы.
Внутри электродвигателя
Анимация, показывающая работу щеточного электродвигателя постоянного тока.Начнем с общего плана простого двухполюсного электродвигателя постоянного тока. Простой мотор состоит из шести частей:
- Якорь или ротор
- Коммутатор
- Кисти
- Ось
- Полевой магнит
- Блок питания постоянного тока какой-то
Электродвигатель — это все о магнитах и магнетизме: двигатель использует магниты для создания движения. Если вы когда-либо играли с магнитами, вы знаете основной закон всех магнитов: противоположности притягиваются, а любит отталкиваться.Итак, если у вас есть два стержневых магнита, концы которых помечены как «север» и «юг», то северный конец одного магнита будет притягивать южный конец другого. С другой стороны, северный конец одного магнита будет отталкивать северный конец другого (и аналогично юг будет отталкивать юг). Внутри электродвигателя эти силы притяжения и отталкивания создают вращательное движение.
Чтобы понять, как работают электродвигатели, важно понять, как работают электромагниты. Электромагнит — основа электродвигателя.
Электродвигатели классифицируются по двум различным категориям: DC (постоянный ток) и AC (переменный ток). В этих категориях существует множество типов, каждый из которых предлагает уникальные возможности, которые подходят им для наилучшего применения.
История
В 1821 году Майкл Фарадей создал первый электродвигатель. Он работал с использованием силы магнетизма.
Он создал простой электромагнит, взяв гвоздь и проволоку, намотав около 100 петель проволоки вокруг гвоздя и подключив их к батарее.При этом у него был простой электромагнит с северным и южным полюсами. В середине гвоздя он проделал отверстие и вставил в него веретено, чтобы гвоздь мог вращаться. Затем он взял магнит в форме подковы и поместил гвоздь, обернутый проволокой, посередине.
Он подключил провод северного полюса к отрицательному полюсу батареи, а провод южного полюса к положительному полюсу. Основной закон магнетизма сказал ему, что произойдет: северный конец электромагнита будет отталкивать северный конец подковообразного магнита и притягивать южный полюс.То же самое произошло с другой стороной ногтя, в результате чего гвоздь повернулся.
Фарадей не был доволен результатом электромотора, потому что мотор вращался только один раз. Он поменял полярность аккума и проволочный гвоздь снова повернулся только один раз. Если бы он менял полярность каждый раз, когда северный полюс гвоздя, обернутого проволокой, находился напротив южного полюса подковообразного магнита, то он бы получил желаемый результат. Обернутый проволокой гвоздь будет вращаться и вращаться вокруг шпинделя (пока батарея не разряжена).
Связанные страницы
Детские картинки
Вид в разрезе статора асинхронного двигателя.
Электромагнитный эксперимент Фарадея, 1821 г.
«Электромагнитный самовращающийся двигатель» Джедлика, 1827 г. (Музей прикладного искусства, Будапешт). Исторический мотор отлично работает и сегодня.
Ротор электродвигателя (слева) и статор (справа)
Маленький мотор постоянного тока игрушки с коммутатором
Работа щеточного электродвигателя с двухполюсным ротором и статором ПМ.