Система динамической стабилизации (VDC) — общая информация, принцип функционирования
Система динамической стабилизации (VDC) — общая информация, принцип функционирования
Схема расположения компонентов VDC и смежных системПринцип функционирования VDC при заносе на повороте
Принцип функционирования VDC при недостаточной реакции автомобиля на поворот руля
Функционирование гидромодулятора VDC в режиме нормального торможения (на примере контура одного колеса)
Функционирование гидромодулятора VDC в режиме сброса давления при выжатой педали ножного тормоза (на примере контура одного колеса)
Функционирование гидромодулятора VDC в режиме удержания давления при выжатой педали ножного тормоза (на примере контура одного колеса)
Функционирование гидромодулятора VDC в режиме повышения давления при выжатой педали ножного тормоза (на примере контура одного колеса)
Функционирование гидромодулятора VDC в режиме повышения давления при отпущенной педали ножного тормоза (на примере контура одного колеса)
Функционирование гидромодулятора VDC в режиме удержания давления при отпущенной педали ножного тормоза (на примере контура одного колеса)
Функционирование гидромодулятора VDC в режиме сброса давления при отпущенной педали ножного тормоза (на примере контура одного колеса)
Система VDC представляет собой систему с обратной связь, позволяющую сохранить курсовую устойчивость при движении транспортного средства в различных режимах (полное или частичное торможение, движение накатом, разгон, торможение двигателем, изменение нагрузок, выполнение экстремальных маневров, и пр.
 ) VDC объединена с
ABS и антипробуксовочной системой/системой контроля тяги (TCS), логически развивая
предоставляемые ими преимущества.
) VDC объединена с
ABS и антипробуксовочной системой/системой контроля тяги (TCS), логически развивая
предоставляемые ими преимущества.Схема размещения компонентов VDC и смежных систем представлена на иллюстрации.
Система VDC упреждает «опережение» или «запаздывание» входа автомобиля в поворот
при движении по дорогам со скользким покрытием. Модуль управления VDC выявляет
намерения водителя по совершению маневров на основании анализа информации, поступающей
от датчиков угла поворота рулевого колеса, тормозного давления, отслеживания рабочих
параметров силового агрегата и пр. Одновременно, ориентируясь на показания датчиков
ABS, поперечных перегрузок (G), уводящего момента, и пр., система оценивает реакцию
автомобиля на действия водителя. Сравнивая поступающую информацию с заложенными
в память процессора базовыми параметрами, модуль управления выявляет тенденции
к заносам, связанным с недостаточностью или чрезмерностью чувствительности транспортного
средства, и своевременно обеспечивает создание противодействующих усилий за счет
индивидуальной активации тормозных механизмов, корректировки тягового усилия двигателя
и управления подключением полного привода (через TCM автоматической трансмиссии),
т.
Принцип функционирования VDC
Подавление «чрезмерной» реакции автомобиля поворот руля
(«опережение»)
В момент начала увода (заноса) задней части автомобиля в результате чрезмерной
реакции на поворот руля модуль управления VDC активирует колесные цилиндры тормозных
механизмов обоих наружных колес, что приводит к возникновению силы, противодействующей
уводящему моменту.
Подавление «недостаточной» реакции автомобиля на поворот
руля («запаздывание»)
Если при входе автомобиля в поворот передок начинает уводить (сносить) в курсовом
направлении, модуль управления VDC активирует тормозные механизмы обоих «внутренних»
колес, создавая силу реакции, компенсирующую связанный со сносом передка уводящий
момент.
Модуль управления VDC
На основании данных, поступающих от соответствующих информационных датчиков,
модуль осуществляет управление функционированием гидромодулятора VDC, а также
производит активацию отдельных устройств ABS и антипробуксовочной системы/системы
контроля тяги (TCS).
Обмен данными модуля управления VDC с TCM автоматической трансмиссии и датчиком поворота рулевого колеса осуществляется по шине CAN.
В случае выявления нарушений исправности функционирования VDC модуль управления
обеспечивает отключение системы и активацию соответствующей контрольной лампы
на приборном щитке автомобиля. Коды выявленных отказов сохраняются в памяти
процессора.
Гидромодулятор VDC
Гидромодулятор по команде модуля управления обеспечивает активацию насосной
сборки и переключение электромагнитных клапанов, контролирующих подачу тормозной
жидкости к колесным цилиндрам.
Принцип функционирования гидромодулятора
Режим нормального торможения (ABS не активирована)
В режиме нормального торможения ни один из электромагнитных клапанов не активирован
(порты впускного и отсечного клапанов открыты, выпускного и всасывающего — закрыты).
Режим сброса давления при выжатой педали ножного тормоза
Впускной и выпускной электромагнитные клапаны активированы, все прочие — нет. Таким образом, порты впускного и всасывающего клапанов закрыты, выпускного и отсечного — открыты. Несмотря на то, что напор ГТЦ передается через открытый порт всасывающего клапана, дальнейшее распространение давление блокируется закрытым впускным клапаном, с другой стороны, пока порт выпускного клапана открыт, тормозная жидкость из колесного цилиндра свободно перетекает в резервуар, что приводит к сбросу гидравлического давления и ослаблению тормозного усилия.
Из резервуара тормозная жидкость перекачивается насосом обратно в ГТЦ.
Режим удержания давления при выжатой педали ножного тормоза
В данном режиме активирован лишь впускной электромагнитный клапан, т. е. порты
всех клапанов кроме отсечного закрыты. Напор жидкости от ГТЦ через открытый
порт отсечного клапана подается на впускной клапан, но дальше не проходит. Так
как порт выпускного клапана также закрыт, давление продолжает удерживаться в
колесном цилиндре.
е. порты
всех клапанов кроме отсечного закрыты. Напор жидкости от ГТЦ через открытый
порт отсечного клапана подается на впускной клапан, но дальше не проходит. Так
как порт выпускного клапана также закрыт, давление продолжает удерживаться в
колесном цилиндре.
В течение всего цикла данного режима насос продолжает срабатывать по командам
модуля управления VDC.
Режим повышения давления при выжатой педали ножного тормоза
Все электромагнитные клапаны деактивированы, как и в режиме нормального торможения. Напор гидравлической жидкости от ГТЦ через открытые порты отсечного и впускного клапанов передается в колесный цилиндр, обеспечивая повышение давления.
Насос продолжает срабатывать по командам модуля управления VDC в течение всего цикла.
Режим повышения давления при отпущенной педали ножного тормоза
В данном режиме активируются только отсечной и всасывающий клапаны, впускной
и выпускной остаются деактивированными. Таким образом, порты отсечного и выпускного
клапанов закрыты, впускного и отсечного — открыты и насос обеспечивает перекачивание
тормозной жидкости из резервуара ГТЦ в колесный цилиндр через открытые порты
всасывающего и впускного клапанов, что приводит к активации тормозного механизма.
Таким образом, порты отсечного и выпускного
клапанов закрыты, впускного и отсечного — открыты и насос обеспечивает перекачивание
тормозной жидкости из резервуара ГТЦ в колесный цилиндр через открытые порты
всасывающего и впускного клапанов, что приводит к активации тормозного механизма.
Режим удержания давления при отпущенной педали ножного тормоза
Режим сброса давления при отпущенной педали ножного тормоза
Все электромагнитные клапаны активированы, т.е., порты отсечного и впускного клапана закрыты, всасывающего и выпускного — открыты. При этом насос обеспечивает забор тормозной жидкости из резервуара и подачу ее к ГТЦ через открытый порт всасывающего клапана. Поскольку впускной клапан закрыт, жидкость не попадает в колесный цилиндр, в то время как отток ее из цилиндра в резервуар обеспечивается через открытый порт выпускного клапана. В результате давление в колесном цилиндре сбрасывается. Из резервуара тормозная жидкость перекачивается к ГТЦ через открытый всасывающий клапан. При этом напор подаваемой насосом жидкости на закрытый отсечной клапан продолжает расти и по достижении предельного допустимого значения сбрасывается через редукционную сборку в резервуар ГТЦ.
Датчик поворота рулевого колеса
Датчик выдает на модуль управления информацию о направлении и величине угла
поворота рулевого колеса.
Датчик поперечных перегрузок (G) и уводящего момента
На основании поступающей от датчика информации модуль управления VDC оценивает
реакцию автомобиля на действия водителя при выполнении маневров.
Колесные датчики ABS
Датчики ABS выполняют свою штатную функцию по контролю частоты вращения оборотов
каждого из колес автомобиля.
Модуль управления двигателем (ECM)
ECM осуществляет управление выходными параметрами двигателя в соответствии с
данными, поступающими с модуля управления VDC, а также поставляет на последний
информацию о текущих рабочих параметрах и оборотах силового агрегата.
Модуль управления АТ (TCM)
TCM осуществляет управление муфтами сцепления АТ, корректируя тяговое усилие
в соответствии с данными, поступающими с модуля управления VDC.
Контрольная лампа ABS
Контрольная лампа служит для предупреждения водителя об отказах системы антиблокировки
тормозов (ABS).
Контрольная лампа VDC
Данная контрольная лампа предупреждает водителя о неисправностях в системах
динамической стабилизации (VDC) и TCS.
Сигнальный индикатор активации VDC
Активируясь в проблесковом (VDC) или постоянном (TCS) режиме, индикатор предупреждает
водителя о срабатывании соответствующей системы.
Сигнальный индикатор отключения VDC (VDC OFF)
Индикатор активируется при принудительном отключении систем VDC/TCS по команде
пользователя.
Выключатель деактивации VDC
|
|
Выключатель помещается на консольной секции панели приборов под сборкой радиоприемником
и позволяет водителю произвести временное принудительное отключение системы
динамической стабилизации.
|
Отключение VDC возможно только при скоростях движения автомобиля ниже 60 км/ч (38 миль/ч). |
Удерживание кнопки выключателя VDC нажатой в течение более 10 секунд приводит к отключению сигнального индикатора «VDC OFF», после чего кнопка блокируется и пользование ею становится возможным лишь после перезапуска двигателя.
Автоматическая активация отключенной системы VDC происходит при повышении скорости движения автомобиля до 60 км/ч (38 миль/ч).
Необходимость в отключении VDC, когда определенное пробуксовывание колес оказывается полезным, может возникать в следующих случаях:
a) При начале движения по обледенелой или идущей круто в гору дороге;
b) При попытках выбраться из грязи или сугроба в случае увязания всех четырех
колес.
назначение, устройство и принцип работы
К сожалению, среди массы автолюбителей распространено мнение о том, что от мощности авто зависит его управляемость. Однако, любой автомобиль может отклониться от курса и создать аварийную ситуацию на дороге. Тема безопасности вождения и сохранности жизни водителя и пассажиров авто не теряет актуальности и по сей день. В 90-х годах прошлого века был сделан значительный шаг в обеспечении безопасности вождения. Была создана система динамической стабилизации автомобиля ESP и ESC. Благодаря этому снизилось количество ДТП на дорогах в ряде развитых стран. Так, система стабилизации стала обязательной к установке на выпускаемых авто.
Однако, любой автомобиль может отклониться от курса и создать аварийную ситуацию на дороге. Тема безопасности вождения и сохранности жизни водителя и пассажиров авто не теряет актуальности и по сей день. В 90-х годах прошлого века был сделан значительный шаг в обеспечении безопасности вождения. Была создана система динамической стабилизации автомобиля ESP и ESC. Благодаря этому снизилось количество ДТП на дорогах в ряде развитых стран. Так, система стабилизации стала обязательной к установке на выпускаемых авто.
Назначение ESP и ESC
Обобщённо систему динамической стабилизации называют — ESP (Electronic Stability Program). Вместе с тем, ESP ещё означает и система курсовой стабилизации ESC (Electronic Stability Control). У различных производителей автомобилей ESP может называться по-разному. Но суть от этого не меняется.
Устройство ESP и ESCСистема ESP предназначена для:
- Предотвращения пробуксовки колес;
- Предотвращение заносчивость авто.
 На скользкой дороге автомобили с задним приводом склонны к заносам. ESP минимизирует заносчивость задней оси, отслеживать на сколько был повернут руль, и на сколько сильно была нажата педаль газа. Так она не даст водителю «пере газовать» в момент поворота;
На скользкой дороге автомобили с задним приводом склонны к заносам. ESP минимизирует заносчивость задней оси, отслеживать на сколько был повернут руль, и на сколько сильно была нажата педаль газа. Так она не даст водителю «пере газовать» в момент поворота; - Отслеживание, чтобы автомобиль двигался в том направлении, в котором повернут руль машины.
Устройство ESP и ESC
Система динамической стабилизации охватывает возможности более простых систем, таких как ABS, TCS, EBD, и EDS. Чтоб лучше разобраться нужно воспользоваться электрической схемой.
Если рассматривать по отдельности, то ABS (антиблокировочная тормозная система) предназначена для предотвращения блокировки тормозной системы. Благодаря ей даже у самого неопытного водителя останется возможность управлять машиной. Даже если водитель начал экстренное торможение, если к примеру неожиданно появилось препятствие на дороге, в таком случае, водитель инстинктивно нажмёт на педаль тормоза, машина при этом не уйдет в занос. Если в автомобиле не предусмотрена система ABS следует практиковать прерывистое торможение.
Если в автомобиле не предусмотрена система ABS следует практиковать прерывистое торможение.
ABS контролирует вращение всех колес, сохраняя требуемое сцепление с дорожным покрытием или асфальтом, когда это требуется.
TCS (система контроля тяги) — предназначена для предотвращения пробуксовки колес машины. TCS работает следующим образом: электронные датчики, контролируют и регистрируют положение колес. Также, контролю подвергается угловая скорость и проскальзывание колес, вернее их степень. Если зафиксирована потеря сцепления с асфальтом или другим дорожным покрытием, или обнаружена пробуксовка, TCS максимально быстро устраняет этот факт.
EBD (электронная система распределения тормозных усилий) — распределяет тормозные усилия в момент торможения. EBD отличается от ABS тем, что способна помогать водителю в постоянном управление автомобилем, не только в моменте резкого, экстренного торможения.
Основными задачами EBD являются: снизить риски и вероятности заноса при непредвиденном торможении, сохранить курсовую устойчивость используя боковые силы, и определить степень проскальзывания колес машины.
EDS (электронная блокировка дифференциала) — предназначена для блокировки дифференциалов при участии электронных датчиков и предотвращает пробуксовку колёс автомобиля. EDS работает в скоростном диапазоне до 80 км/ч. В случае если EDS зафиксировала проскальзывание одного из колес, то происходит притормаживание скользящего колеса. На подтормаживающем колесе увеличивается крутящий момент. Из-за того, что колеса соединены дифференциалом, крутящий момент передаётся на соседнее.
Так можно наверное догадаться EDS построена на базе ABS. Отличие в том, что в EDS есть возможность создания давления в тормозной системе. Создаётся давление самостоятельно.
В систему ESP и ESC также входят следующие компоненты:
- чувствительные сенсоры;
- блок управления;
- гидроблок.
Принцип работы ESP и ESC
Сенсоры и датчики фиксируют характеристику движения автомобиля. Сопоставляют с работой различных элементов и агрегатов автомобиля. Зафиксированные данные попадают в блок управления. В блоке управления все полученные данные анализируется по сложным алгоритмам. Ведётся электронный контроль.
В блоке управления все полученные данные анализируется по сложным алгоритмам. Ведётся электронный контроль.
Если было зафиксировано отклонение от курса, то система подаёт импульсы в гидроблок. Импульсы от гидроблока идут различные системы, к примеру в ABS. При необходимости ESC будет подключать и другие элементы контроля автомобиля. Благодаря этому, автомобиль двигается по заданной траектории и курсу.
Высокая загрузка ЦП в процессе ЛСАИСО — Windows Client
- Чтение занимает 3 мин
В этой статье
В этой статье описывается решение проблемы, при которой процесс ЛСАИСО использует высокую загрузку ЦП на компьютере под управлением Windows.
Исходная версия продукта: Windows 10 — все выпуски, Windows Server 2016, Windows Server 2019
Исходный номер статьи базы знаний: 4032786
Симптомы
На компьютере под управлением Windows 10, Windows Server 2016 или более поздней версии на компьютере под управлением Windows 10, Windows Server или более поздней версии используется высокая загрузка ЦП ЛСАИСО (LSA изолирована).
Причина
В Windows процесс ЛСАИСО выполняется как процесс изолированного режима пользователя (ИУМ) в новой среде безопасности, который называется виртуальным безопасным режимом (VSM).
Приложения и драйверы, которые пытаются загрузить DLL в процесс ИУМ, внедрять поток или доставлять APC пользовательского режима, могут полностью стабилизировать всю систему. Этот дестабилизатион может включать высокий ЛСАИСО ЦП, описанный в разделе «симптомы».
Решение 1: использование процесса исключения
Некоторые приложения (например, антивирусные программы) часто могут внедрять библиотеки DLL или очереди АПКС в процесс ЛСАИСО. Это приводит к тому, что процесс ЛСАИСО будет работать с большим потреблением ресурсов ЦП.
Это приводит к тому, что процесс ЛСАИСО будет работать с большим потреблением ресурсов ЦП.
Для устранения неполадок невозможно присоединить средства к процессу ИУМ. Это предотвратит использование средств отладки Windows или ВПА\КСПЕРФ для записи трассировок стека во время ЛСАИСО процессора спикинг. Поэтому оптимальным способом устранения неполадок в этом сценарии является использование методологии «Process of списания». Для этого отключите приложения и драйверы до тех пор, пока не будет устранено снижение производительности ЦП. Определив программное обеспечение, которое вызывает проблему, обратитесь к поставщику за обновлением программного обеспечения. Вы можете ссылаться на рекомендации независимых поставщиков программного обеспечения, перечисленные в следующей статье MSDN:
Процессы изолированного режима пользователя (ИУМ)
Примечание
Этот способ может требовать перезагрузку после отключения подозреваемого программного обеспечения и драйверов во время тестирования пик процессора.
Решение 2: Проверка наличия АПКС в очереди
Скачайте бесплатные средства отладки для Windows (WinDbg, КД, CDB, NTSD). Эти средства включены как в набор драйверов Windows (WDK), так и в набор драйверов Windows (WDK). Затем выполните указанные ниже действия, чтобы определить, какой драйвер помещается в очередь с помощью APC ЛСАИСО:
При воспроизведении копилки ЦП создайте дамп памяти ядра с помощью средства, такого как NotMyFault.exe, на следующем веб-сайте Sysinternals:
Набор Sysinternals
Примечание
Полный дамп памяти не рекомендуется, так как он потребует расшифровки, если в системе включен VSM. Чтобы включить дамп ядра, выполните указанные ниже действия.
- Откройте элемент » система » в панели управления, а затем выберите пункт Дополнительные параметры системы.
- На вкладке Дополнительно диалогового окна Свойства системы выберите Параметры в области Загрузка и восстановление .

- В диалоговом окне Загрузка и восстановление выберите дамп памяти ядра в списке запись отладочной информации .
- Обратите внимание на расположение файла дампа для использования на шаге 5, а затем нажмите кнопку ОК.
Откройте средство «WinDbg.exe» в средствах отладки для Windows.
В меню файл выберите путь к файлу символов , добавьте следующий путь для сервера символов Майкрософт в поле путь к символам и нажмите кнопку ОК :
https://msdl.microsoft.com/download/symbolsВ меню файл выберите команду Открыть аварийную копию памяти.
Перейдите к расположению файла дампа ядра, записанного в действии 1d, и нажмите кнопку Открыть. Проверьте дату в DMP файле и убедитесь, что он был только что создан в ходе этого сеанса устранения неполадок.

В командной строке введите ! APC , а затем нажмите клавишу ВВОД.
Выходные данные должны выглядеть так, как показано на следующем снимке экрана.
Поиск в результатах LsaIso.exe. Если драйвер с именем <ProblemDriver> sys указан в разделе LsaIso.exe (как показано на примере снимка экрана результатов на шаге 6), обратитесь к поставщику и попросите его перейти к рекомендованному снижению, указанному в разделе процессы изолированного пользователя (ИУМ) .
Примечание
Если в разделе Lsaiso.exe не указаны драйверы, это означает, что процесс лсаисо не содержит очереди АПКС.
Дополнительные сведения
В VSM используются режимы изоляции, которые называются виртуальными уровнями доверия (ВТЛ) для защиты процессов ИУМ (также известных как трустлетс). Процессы ИУМ, такие как ЛСАИСО, выполняются в VTL1, пока другие процессы работают в VTL0.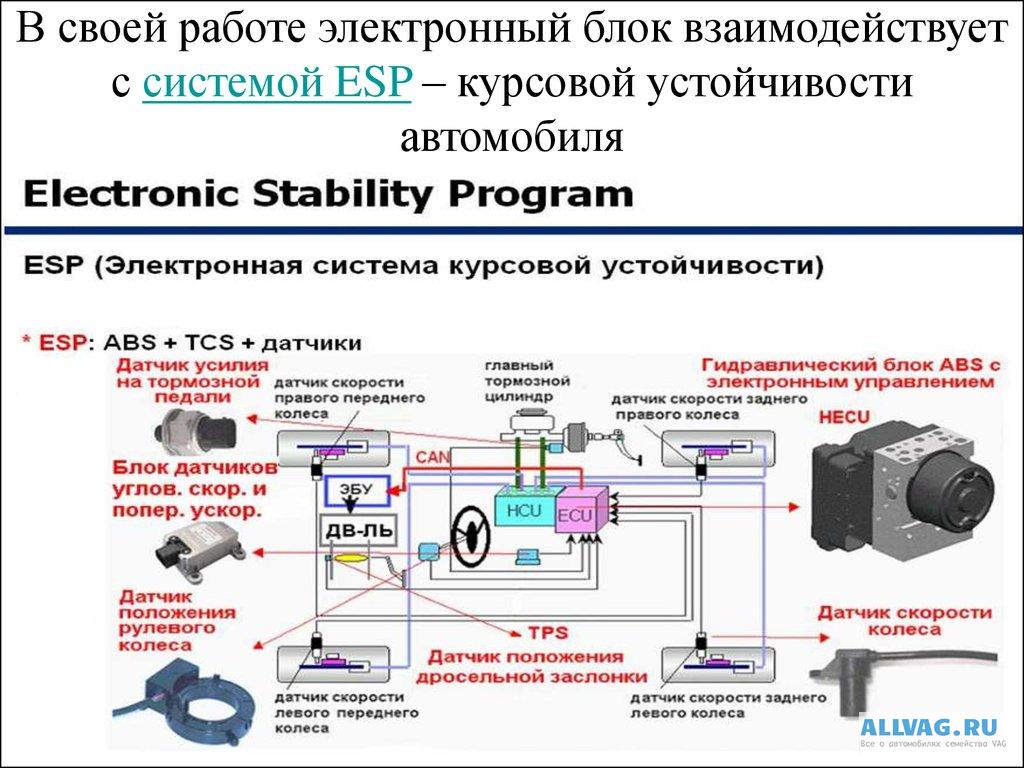 Страницы памяти процессов, выполняемых в VTL1, защищены от вредоносного кода, запущенного в VTL0.
Страницы памяти процессов, выполняемых в VTL1, защищены от вредоносного кода, запущенного в VTL0.
До Windows 10 и Windows Server 2016 процесс службы подсистемы LSASS был исключительно ответственен за управление политикой локальной системы, проверкой подлинности пользователей и аудитом, пока он также обрабатывает конфиденциальные данные безопасности, такие как хэши паролей и ключи Kerberos.
Чтобы использовать преимущества безопасности VSM, трустлет ЛСАИСО, выполняемые в VTL1, взаимодействуют через канал RPC с процессом ЛСАИСО, запущенным в VTL0. Секреты ЛСАИСО шифруются перед отправкой в LSASS, а страницы ЛСАИСО защищены от вредоносных программ, запущенных в VTL0.
Базовая спецификация производительности рабочей станции мониторинга видеонаблюдения Cisco, выпуск 7.0
Содержание
Базовая спецификация производительности рабочей станции мониторинга видеонаблюдения Cisco, выпуск 7.0 и выше
Содержание
Обзор
Технические характеристики рабочей станции
Разрешение микширования и кодеки
Передовой опыт: используйте инструмент профилирования рабочей станции
Вопросы и ответы
Связанная документация
Базовая спецификация производительности рабочей станции мониторинга видеонаблюдения Cisco, выпуск 7. 0 и выше
0 и выше
Последнее обновление: 12 апреля 2013 г.
Содержание
• Обзор
• Технические характеристики рабочей станции
• Смешивание разрешений и кодеков
• Передовой опыт: используйте инструмент профилирования рабочей станции
• Вопросы и ответы
• Связанная документация
Обзор
В этом документе представлены базовые характеристики рабочей станции видеонаблюдения.Производительность рабочей станции, на которой отображается несколько окон видеонаблюдения, зависит от многих переменных, в том числе от ЦП, памяти, скорости шины, возможностей видеокарты и других приложений, установленных на рабочей станции. Общее качество восприятия также может варьироваться в зависимости от типа используемой системы, количества визуализируемых видеопотоков и характеристик этих потоков.
В этом документе описываются базовые показатели производительности для выделенной рабочей станции наблюдения за мониторингом, чтобы гарантировать общее качество мониторинга. В этом документе также описывается максимальное количество видеопотоков, которые могут выполняться с приемлемым качеством на рабочей станции мониторинга при использовании различных кодеков (MPEG-4 и H.264). Значения, перечисленные в таблице допустимой нагрузки стандартного разрешения, были проверены с использованием настроек видео NTSC. .
В этом документе также описывается максимальное количество видеопотоков, которые могут выполняться с приемлемым качеством на рабочей станции мониторинга при использовании различных кодеков (MPEG-4 и H.264). Значения, перечисленные в таблице допустимой нагрузки стандартного разрешения, были проверены с использованием настроек видео NTSC. .
Примечание Убедитесь, что вы используете версию этой спецификации, которая соответствует вашей версии Cisco Video Surveillance Manager (VSM). В этой спецификации использовался VSM 7.0 для проверки допустимых нагрузок
Совет Используйте инструмент Cisco Video Surveillance Workstation Profiler Tool, чтобы определить ожидаемую производительность рабочей станции. Дополнительные сведения см. В разделе Использование инструмента Pofiler рабочей станции для мониторинга видеонаблюдения Cisco.
Технические характеристики рабочей станции
В таблице 1 описаны конфигурации рабочей станции мониторинга, которая отображает видео из Cisco Video Surveillance Manager (VSM) 7. 0. Рабочие станции с этими конфигурациями использовались для определения рекомендуемых максимальных нагрузок видео. Это предполагает, что рабочая станция предназначена для видео. Запуск другого программного обеспечения, например брандмауэров, антивирусных приложений, утилит для записи CD / DVD и приложений общего назначения, снизит качество взаимодействия с пользователем.
0. Рабочие станции с этими конфигурациями использовались для определения рекомендуемых максимальных нагрузок видео. Это предполагает, что рабочая станция предназначена для видео. Запуск другого программного обеспечения, например брандмауэров, антивирусных приложений, утилит для записи CD / DVD и приложений общего назначения, снизит качество взаимодействия с пользователем.
Атрибут рабочей станции | Клиентская рабочая станция с физической безопасностью |
Операционная система (ОС) | Windows 7 Pro, Ultimate или Enterprise, 64-разрядная |
ЦП | Intel Core i7, 3. |
Память | 6 ГБ DDR3 или больше. |
Видеокарта | Nvidia GeForce GT430 PCIe Nvidia GeForce GTX460 PCIe Обновите драйверы видеокарты до последней версии. |
Браузер | Microsoft Internet Explorer 8 или более поздняя версия, 32- или 64-разрядная версии |
Сетевое подключение | Требуется сетевое подключение Gigabit Ethernet (GigE). Обновите драйверы сетевой карты до последней версии. |
.Net Framework | На клиентском ПК должна быть установлена Microsoft .NET Framework 4.0 (полная установка). Инструкции по загрузке см. http://www.microsoft.com/en-us/download/confirmation.aspx?id=17851 |
Тип учетной записи пользователя | Требуется стандартная учетная запись пользователя Windows 7 (гостевые учетные записи не поддерживаются). |
Версия DirectX | DirectX 11.0 или новее (входит в состав Windows 7). |
 07 ГГц или быстрее.
07 ГГц или быстрее. На веб-сайте .Net:
На веб-сайте .Net:В таблице 2 показано максимальное количество видеопотоков стандартной четкости, которые могут выполняться с приемлемым качеством на рекомендуемой рабочей станции мониторинга.
MPEG-4 | ЧАС. | Смешанный | |
Видеопотоки | 16 | 16 | 16 |
Разрешение | 4CIF | 4CIF | 4CIF |
Частота кадров | 30 кадров в секунду | 30 кадров в секунду | 30 кадров в секунду |
Битрейт на поток (CBR) | 3 Мбит / с | 3 Мбит / с | 2-3 Мбит / с |
 264 SD
264 SD В таблице 3 показано максимальное количество видеопотоков высокой четкости, которые могут выполняться с приемлемым качеством на рекомендованной рабочей станции для мониторинга при использовании H. 264 кодек.
264 кодек.
H.264 HD | H.264 HD | H.264 HD | |
Видеопотоки | 9 | 6 | 4 |
Разрешение | 720p | 1080p | 1080p |
Частота кадров | 30 кадров в секунду | 30 кадров в секунду | 30 кадров в секунду |
Битрейт на поток (CBR) | 4 Мбит / с | 4 Мбит / с | 12 Мбит / с |
Разрешения микширования и кодеки
На одной рабочей станции мониторинга можно одновременно использовать несколько кодеков. Однако количество потоков не обязательно совмещается линейно. Кроме того, потоки 1080p 12 Мбит / с следует смешивать только с одним потоком меньшего разрешения.
Однако количество потоков не обязательно совмещается линейно. Кроме того, потоки 1080p 12 Мбит / с следует смешивать только с одним потоком меньшего разрешения.
Передовой опыт: используйте инструмент профилирования рабочей станции
Лучше всего проверять производительность любой существующей системы с помощью инструмента Cisco Video Surveillance Workstation Profiler Tool. Этот инструмент позволяет пользователю рабочей станции определить ожидаемую производительность рабочей станции.
Информацию об установке и работе с этим инструментом см. В документе Использование инструмента Pofiler для рабочей станции мониторинга видеонаблюдения Cisco.
Вопросы и ответы
Q. Можно ли использовать два видеомонитора с двумя видеокартами или с одной картой с двумя разъемами?
A. В одной системе можно использовать до 2 одинаковых видеокарт, максимум с 4 мониторами, по два на видеокарту. Хотя дополнительные графические карты и / или дополнительные мониторы не создают дополнительной производительности в системе, эту конфигурацию можно использовать для обеспечения большей гибкости отображения. Необходимо обеспечить, чтобы общее совокупное видео, отображаемое в одной системе, независимо от количества дисплеев или видеокарты, оставалось в пределах параметров, указанных выше.
Хотя дополнительные графические карты и / или дополнительные мониторы не создают дополнительной производительности в системе, эту конфигурацию можно использовать для обеспечения большей гибкости отображения. Необходимо обеспечить, чтобы общее совокупное видео, отображаемое в одной системе, независимо от количества дисплеев или видеокарты, оставалось в пределах параметров, указанных выше.
В. Какая конфигурация Windows 7 рекомендуется при использовании двух видеокарт?
А. Чтобы настроить рабочую станцию Windows 7 с двумя картами, мы рекомендуем следующее.
1. Подключите мониторы к видеокарте через разъемы DVI.
2. На рабочей станции Windows 7 выберите Панель управления> Система и безопасность.
3. Выберите «Система» и нажмите «Дополнительные параметры системы».
4. На вкладке «Дополнительно» щелкните «Параметры производительности» и выберите «Оптимизировать производительность».
Рисунок 1 Настройка рабочей станции для достижения максимальной производительности
Q. Поддерживается ли Многоканальный клиент видеонаблюдения в Windows 7?
A. Многоканальный клиент видеонаблюдения 32-разрядный поддерживается в Windows 7, 64-разрядная версия с использованием Internet Explorer 8, 32-разрядная версия, а 64-разрядная версия Многоканальный клиент видеонаблюдения поддерживается в 64-разрядной версии Windows 7 с использованием Cisco Safety and Security Desktop. Если у вас есть вопрос о том, поддерживает ли ваша рабочая станция VSM AXClient, используйте инструмент профилирования рабочей станции (как описано в разделе «Рекомендации: использование инструмента профилирования рабочей станции»).
В. Как настройки видео PAL влияют на ожидаемое поведение?
A. Хотя таблицы приемлемой нагрузки стандартной четкости были проверены с использованием настроек видео NTSC, использование настроек PAL (например, 25 кадров в секунду) не должно ухудшать качество наблюдения.
В. Могу ли я использовать рабочую станцию, не соответствующую рекомендованным базовым характеристикам?
A. При рассмотрении количества кодеков, разрешений и частоты кадров, поддерживаемых VSM, а также количества доступных рабочих станций, видеокарт и процессоров, трудно определить оптимальную рабочую станцию для данного пользовательского опыта, поэтому в этом документе приведены рекомендуемые максимальные нагрузки.Рабочие станции, не соответствующие базовым спецификациям, могут воспроизводить некоторое видео, но они не могут обеспечить такое же качество наблюдения. Если у вас есть вопрос о том, может ли ваша рабочая станция выполнять необходимые вам задачи, следуйте рекомендациям по использованию инструмента профилирования рабочих станций (как описано в разделе «Рекомендации: использование инструмента профилирования рабочих станций»).
Q. В чем разница между «минимальными требованиями» и этой «базовой спецификацией»?
А. Минимальные требования определяют, что требуется для установки и запуска VSM AXClient для отображения одного видеопотока. Они не определяют допустимые нагрузки для сценариев использования с несколькими панелями или необходимую конфигурацию для обеспечения качественного мониторинга.
Минимальные требования определяют, что требуется для установки и запуска VSM AXClient для отображения одного видеопотока. Они не определяют допустимые нагрузки для сценариев использования с несколькими панелями или необходимую конфигурацию для обеспечения качественного мониторинга.
Связанная документация
См. Следующую документацию для получения дополнительной информации о видеонаблюдении Cisco, включая установку сервера, конфигурацию системы, видеонаблюдение и другие функции.
Тема | Связанный документ | Описание |
|---|---|---|
Все документы | Веб-сайт документации по видеонаблюдению Cisco | Ссылки на все документы, описанные в этой таблице. |
Примечания к выпуску | Примечания к выпуску Cisco Video Surveillance Manager, выпуск 7.0 | Описывает новые и измененные функции, открытые и устраненные предупреждения и другую информацию. |
Установка сервера | Руководство пользователя серии мультисервисных платформ для обеспечения физической безопасности Cisco | Инструкции по физической установке и настройке серверного устройства Cisco VSM .На каждом сервере может быть запущено приложение Media Server, приложение Operations Manager или и то, и другое. |
Консоль управления | Руководство администратора консоли управления видеонаблюдением Cisco | Используйте консоль управления Cisco VSM на основе браузера для настройки и обслуживания сервера Cisco VSM. |
Конфигурация и мониторинг на основе браузера | Руководство пользователя Cisco Video Surveillance Operations Manager | Используйте браузер Operations Manager для настройки и управления развертыванием Cisco VSM. Operation Manager также можно использовать для мониторинга видео в реальном времени и в записи. |
Видеонаблюдение за рабочей станцией | Руководство пользователя настольного компьютера Cisco Video Surveillance Safety and Security | Используйте приложение Cisco Video Surveillance Safety and Security Desktop (Cisco SASD) для просмотра камер, видео и предупреждений на графической карте. Вы также можете отображать видеосетку на отдельном мониторе, просматривать видеостены на нескольких рабочих станциях или создавать автоматические рабочие станции. |
Проигрыватель видеоклипов | Руководство пользователя проигрывателя Cisco Video Surveillance Review | Используйте настольное приложение Cisco VSM Review Player для базового воспроизведения многопанельных видеоклипов. |
Требования к рабочей станции | Базовая спецификация производительности рабочей станции мониторинга видеонаблюдения Cisco | Базовые технические характеристики рабочей станции видеонаблюдения. |
Инструмент профилировщика рабочей станции | Использование инструмента Pofiler для рабочей станции мониторинга видеонаблюдения Cisco | Описывает, как использовать инструмент Cisco Video Surveillance Workstation Profiler Tool (Profiler Tool) для анализа способности клиента ПК рендерить видео. |
Разверните виртуальную машину Cisco VSM. | Руководство по развертыванию виртуальной машины для видеонаблюдения Cisco для платформ UCS, выпуск 7.0 | Разверните виртуализированный Cisco VSM на поддерживаемой платформе Cisco Unified Computing System. |
VMware HA для Cisco VSM 7.0 Operations Manager на платформах UCS серий B и C | Описывает основные требования и инструкции по развертыванию диспетчера операций с высокой доступностью Cisco Video Surveillance Manager (VSM) 7.0 в виртуализированной среде на сервере UCS серий B и C с использованием VMware HA. | |
Восстановление или ремонт серверного программного обеспечения | Руководство по восстановлению флэш-накопителя Cisco Video Surveillance Manager | Инструкции по ремонту или восстановлению программного обеспечения сервера Cisco VSM. • Восстановить: переустанавливает файлы и разделы операционной системы без удаления видеофайлов, хранящихся на сервере. Перед использованием образа для восстановления необходимо создать резервную копию базы данных Cisco VSM, а затем восстановить базу данных после завершения процесса восстановления.Это действие также сохраняет конфигурацию RAID. • Заводское восстановление: восстанавливает заводские настройки сервера по умолчанию, переустанавливает операционную систему, очищает и перенастраивает RAID. Это действие удаляет все данные, конфигурации, программное обеспечение и видеофайлы с устройства, а затем переустанавливает операционную систему и программное обеспечение Cisco VSM. Выполняйте эту процедуру только при необходимости. |
Ссылка API | • Руководство по программированию API видеонаблюдения Cisco • Справочное руководство API видеонаблюдения Cisco | Описывает интерфейс прикладного программирования (API), используемый для отображения видео с помощью сторонних приложений. Примечание Эти документы доступны в Cisco Developer Network (CDN). Увидимся у представителя службы поддержки Cisco для получения дополнительной информации. |
Миграция системы 6.3.2 на выпуск 7.0 | Руководство по миграции Cisco для видеонаблюдения, выпуск 6.3.2–7.0 | Описывает, как перенести развертывание версии 6.3.2 Cisco Video Surveillance Manager (Cisco VSM) на выпуск 7.0. Перенос развертывания системы видеонаблюдения Cisco с выпуска 6.3.2 на выпуск 7.0 — это однократный процесс, который выполняется с помощью специального набора утилит Cisco. Вы можете выполнить миграцию всего развертывания, включая все медиа-серверы одновременно, или мигрировать медиа-серверы в течение длительного периода времени. Примечание Этот документ доступен в Cisco Developer Network (CDN). Увидимся у представителя службы поддержки Cisco для получения дополнительной информации. |





Cisco и логотип Cisco являются товарными знаками или зарегистрированными товарными знаками Cisco и / или ее дочерних компаний в США.С. и др. Страны. Чтобы просмотреть список товарных знаков Cisco, перейдите по этому URL-адресу: www.cisco.com/go/trademarks. Упомянутые сторонние товарные знаки являются собственностью их владельцев. Использование слова «партнер» не подразумевает партнерских отношений между Cisco и какой-либо другой компанией. (1110R)
Любые IP-адреса и номера телефонов, используемые в этом документе, не предназначены для использования в качестве реальных адресов и телефонных номеров. Любые примеры, вывод команд, схемы топологии сети и другие рисунки, включенные в документ, показаны только в иллюстративных целях. Любое использование реальных IP-адресов или номеров телефонов в иллюстративных материалах является непреднамеренным и случайным.
Любое использование реальных IP-адресов или номеров телефонов в иллюстративных материалах является непреднамеренным и случайным.
© Cisco Systems, Inc., 2012–2013. Все права защищены.
Руководство по настройке высокой доступности и избыточности Cisco Nexus 1000V, выпуск 4.2 (1) SV1 (4) — Настройка высокой доступности на уровне системы [Коммутатор Cisco Nexus 1000V для VMware vSphere]
Настройка высокой доступности на уровне системы
В этой главе описывается система высокой доступности (HA) Cisco NX-OS и операции перезапуска приложений.
В эту главу входят следующие разделы:
• Информация о перезапусках и переключениях VSM
• Рекомендации и ограничения
• Настройка высокой доступности на уровне системы
• Проверка статуса HA
• Дополнительные ссылки
Информация о высокой доступности на уровне системы
Этот раздел включает следующие темы:
• Информация об одинарных и двойных супервизорах
• Информация о перезапусках и переключениях VSM
Информация об одном и двух супервизорах
Cisco Nexus 1000V можно настроить с одним виртуальным модулем супервизора (VSM) или двумя VSM. В Табл. 3-1 описаны роли супервизора высокой доступности для работы с одним и двумя VSM.
В Табл. 3-1 описаны роли супервизора высокой доступности для работы с одним и двумя VSM.
| Работа с одним VSM | Двойная работа VSM |
|---|---|
• Без сохранения состояния — в случае сбоя служба перезапускается из начальной конфигурации. • Stateful — в случае сбоя обслуживание возобновляется из предыдущего состояния. | • Резервирование обеспечивается одним активным VSM и одним резервным VSM. • Активный VSM запускает все системные приложения и управляет системой. • На резервном VSM приложения запускаются и инициализируются в режиме ожидания. Они также синхронизируются и обновляются с активным VSM, чтобы быть готовыми к работе. • При переключении резервный VSM заменяет активный VSM. • Интерфейс управления VSM используется для передачи контрольных сигналов между двумя VSM. • Интерфейс управления используется для предотвращения сценариев разделения мозга. |
Этот раздел включает следующие темы:
• Роли супервизора HA
• Активное и резервное состояния двойного супервизора
• Двойная синхронизация супервизора
Роли супервизора HA
Роль резервирования указывает не только, взаимодействует ли VSM с другими VSM, но также и номер модуля, который он занимает.В таблице 3-2 показаны доступные роли HA для VSM.
| Роль | Номер модуля | Описание |
|---|---|---|
Автономный | 1 | • Эта роль не взаимодействует с другими VSM. • Вы назначаете эту роль, когда в системе есть только один VSM. • Это роль по умолчанию. |
Первичный | 1 | • Эта роль координирует активное / резервное состояние с вторичным VSM. • Эта роль имеет приоритет во время загрузки при согласовании активного / резервного режима. То есть, если вторичный VSM не имеет активной роли при загрузке, первичный VSM принимает активную роль. • Вы назначаете эту роль первому VSM, который вы устанавливаете в системе с двумя VSM. |
Вторичная | 2 | • Эта роль координирует активное / резервное состояние с первичным VSM. • Вы назначаете эту роль второму VSM, который вы устанавливаете в системе с двумя VSM. |

Состояния активного и резервного резервирования двойного супервизора
Независимо от его роли состояние резервирования VSM может быть одним из описанных в таблице 3-3.
| Состояние резервирования | Описание |
|---|---|
Активно | Управляет системой и виден внешнему миру. |
В режиме ожидания | Синхронизирует свою конфигурацию с конфигурацией активного VSM, чтобы он был постоянно готов к работе в случае сбоя или ручного переключения. Вы не можете использовать протоколы Telnet или Secure Shell (SSH) для связи с резервным VSM. Вместо этого вы можете использовать команду attach module из активного VSM для доступа к резервной консоли VSM. Из резервной консоли VSM доступна только часть команд CLI. |

Синхронизация с двумя супервизорами
Активный и резервный VSM находятся в рабочем состоянии HA и могут автоматически синхронизироваться, когда внутреннее состояние одного модуля супервизора является Активным с HA Standby, а внутреннее состояние другого модуля супервизора — HA Standby.
Если выходные данные команды show system redundancy указывают, что рабочий режим избыточности активного VSM — Нет, то активный и резервный VSM еще не синхронизированы. В следующем примере показано внутреннее состояние VSM двойных супервизоров, наблюдаемое в выходных данных команды show system redundancy status .
switch # показать статус резервирования системы
Роль резервирования
—————
административный: автономный
в рабочем состоянии: автономный
Режим резервирования
—————
административный: HA
в рабочем состоянии: нет
Настоящий супервайзер (sup-1)
————————
Состояние резервирования: активно
Состояние супервизора: Активный
Внутреннее состояние: Активно без ожидания
Другой руководитель (sup-2)
————————
Состояние резервирования: отсутствует
переключатель #
Информация о перезапусках и переключениях VSM
Этот раздел включает следующие темы:
• Перезапуск на автономных VSM
• Перезапуск на двойных VSM
• Переключение на сдвоенных VSM
Перезапуск на автономных VSM
В системе только с одним супервизором, когда всем политикам высокой доступности не удалось перезапустить службу, супервизор перезапускается. Супервизор и все службы перезапускаются без предварительной информации о состоянии.
Супервизор и все службы перезапускаются без предварительной информации о состоянии.
Перезапуск на двойных VSM
Когда VSM выходит из строя в системе с двумя супервизорами, система выполняет переключение, а не перезапуск системы, чтобы поддерживать операцию с отслеживанием состояния. Однако в некоторых случаях переключение может оказаться невозможным во время сбоя. Например, если резервный VSM не находится в стабильном резервном состоянии, выполняется перезапуск, а не переключение.
Переключения на двойных VSM
Конфигурация с двумя VSM обеспечивает непрерывную пересылку трафика с переключением с отслеживанием состояния (SSO), когда в VSM происходит сбой. Два VSM работают в режиме «активный / резервный», при этом только один активен в любой момент времени, а другой действует как резервный резервный. Два VSM постоянно синхронизируют состояние и конфигурацию, чтобы обеспечить плавное переключение с отслеживанием состояния большинства служб в случае отказа активного VSM.
Этот раздел включает следующие темы:
• Характеристики переключения
• Автоматические переключатели
• Ручное переключение
Характеристики переключения
Переключение происходит при выходе из строя активного супервизора (например, при повторяющихся сбоях в важной службе или в случае отказа системы, в которой размещен VSM).
Может произойти переключение, инициируемое пользователем (например, если вам нужно выполнить задачи обслуживания в системе, в которой размещен активный VSM).
Переключение HA имеет следующие характеристики:
• Это состояние с отслеживанием состояния (без прерывания работы), поскольку управляющий трафик не изменяется.
• Он не нарушает трафик данных, потому что это не влияет на VEM.
Автоматические переключатели
Когда стабильный резервный VSM обнаруживает отказ активного VSM, он инициирует переключение и переходит в активный. Когда начинается переключение, другое переключение не может быть запущено, пока не станет доступен стабильный резервный VSM.
Когда начинается переключение, другое переключение не может быть запущено, пока не станет доступен стабильный резервный VSM.
Если резервный VSM, который нестабилен, обнаруживает, что активный VSM вышел из строя, то вместо инициирования переключения он пытается перезапустить систему.
Ручные переключатели
Прежде чем вы сможете инициировать переключение с активного на резервный VSM вручную, резервный VSM должен быть стабильным. Чтобы узнать, есть ли это, см. Раздел «Проверка готовности системы к переключению».
После того, как вы убедились, что резервный VSM стабилен, вы можете вручную инициировать переключение (см. Раздел «Ручное переключение активного VSM в резервный»).
Как только начинается процесс переключения, другой процесс переключения не может быть запущен, пока не станет доступен стабильный резервный VSM.
Рекомендации и ограничения
Следуйте этим рекомендациям и ограничениям при настройке высокой доступности на уровне системы:
• Хотя первичный и вторичный VSM могут находиться на одном хосте, для улучшения резервирования устанавливайте их на разных хостах и, если возможно, подключайте их к разным вышестоящим коммутаторам.
• Консоль для резервного VSM доступна через клиент vSphere или с помощью команды module attach
• Вы не можете использовать протоколы Telnet или Secure Shell (SSH) для связи с резервным VSM, поскольку IP-адрес интерфейса управления не настроен, пока VSM не станет активным.
• Активный и резервный VSM должны находиться в одной подсети управления.
Настройка высокой доступности на уровне системы
Этот раздел включает следующие темы:
• Изменение роли VSM
• Настройка переключения
• Добавление второго VSM в автономную систему
• Замена резервного в системе с двумя VSM
• Замена активного элемента в системе с двумя VSM
• Изменение идентификатора домена в системе с двумя VSM
Изменение роли VSM
Используйте эту процедуру для изменения роли VSM на одну из следующих после того, как он уже находится в эксплуатации:
• Автономная
• Первичная
• Среднее
ПЕРЕД НАЧАЛОМ
Перед тем, как начать эту процедуру, вы должны знать или выполнить следующее:
Осторожно Изменение роли VSM может привести к конфликту между парой VSM.Если первичный и вторичный VSM видят друг друга как активные одновременно, система решает эту проблему, сбрасывая первичный VSM.
• Если вы заменяете автономный VSM на вторичный VSM, обязательно сначала изолируйте его от другого VSM в паре, чтобы предотвратить любое взаимодействие с первичным VSM во время изменения. Выключите виртуальную машину от клиента vSphere, прежде чем повторно подключить ее в качестве резервной.
Пример изменения групп портов и профилей портов, назначенных интерфейсам VSM в vSphere Client, см. В следующем документе:
– Руководство по установке программного обеспечения Cisco Nexus 1000V, выпуск 4.2 (1) SV1 (4)
Чтобы изменить автономный VSM на дополнительный VSM, см. Раздел «Добавление второго VSM в автономную систему».
• Вы вошли в интерфейс командной строки в режиме EXEC.
Примечание Установка программного обеспечения Cisco Nexus 1000V VSM дает вам возможность назначить роль для каждого VSM. Эту процедуру можно использовать для изменения исходной конфигурации.
• Возможные роли высокой доступности: автономные, первичные и вторичные.
Для получения дополнительной информации см. Раздел «Роли супервизора HA».
• Возможные состояния резервирования HA — активное и резервное.
Для получения дополнительной информации см. Раздел «Состояния резервирования активного и резервного двойного супервизора».
• Чтобы активировать переключение с основного на дополнительный VSM, необходимо перезагрузить VSM, выполнив одно из следующих действий:
–выпустите команду reload .
— Выключите и снова включите виртуальную машину с клиента vSphere.
• Переход от автономного VSM к основному вступает в силу немедленно.
КРАТКИЕ ДЕЙСТВИЯ
1. роль резервирования системы { автономный | первичный | вторичный }
2. показать статус резервирования системы
3. копировать текущую конфигурацию start-config
ПОДРОБНЕЕ
| Команда | Цель | |
|---|---|---|
Шаг 1 | роль резервирования системы { автономный | первичный | вторичный } Пример: n1000v # роль резервирования системы автономная n1000v # | Обозначает HA-роль VSM. |
Шаг 2 | показать статус резервирования системы Пример: switch # показать статус резервирования системы | (Необязательно) Отображает текущий статус резервирования для VSM (ов). |
Шаг 3 | копировать текущую конфигурацию запуска конфигурации Пример: n1000v (config) # copy running-config startup-config | Постоянно сохраняет текущую конфигурацию посредством перезагрузки и перезапуска, копируя ее в конфигурацию запуска. |
ПРИМЕР
В этом примере показано, как отобразить состояние резервирования системы автономного VSM:
switch # показать статус резервирования системы
Роль резервирования
—————
административный: автономный
в рабочем состоянии: автономный
Режим резервирования
—————
административный: HA
в рабочем состоянии: нет
Настоящий супервайзер (sup-1)
————————
Состояние резервирования: активно
Состояние супервизора: Активный
Внутреннее состояние: Активно без ожидания
Другой руководитель (sup-2)
————————
Состояние резервирования: отсутствует
переключатель #
Настройка переключения
Этот раздел включает следующие процедуры для настройки переключения в системе с двумя VSM:
• Рекомендации и ограничения
• Проверка готовности системы к переключению
• Переключение активного VSM в режим ожидания вручную
Рекомендации и ограничения
При переключении следуйте этим рекомендациям:
• Когда вы вручную инициируете переключение, генерируются системные сообщения, которые указывают на наличие двух VSM и определяют, какой из них становится активным.
• Переключение может быть выполнено только тогда, когда работают оба VSM.
Проверка готовности системы к переключению
Используйте эту процедуру, чтобы убедиться, что и активный, и резервный VSM находятся на своем месте и работают, прежде чем переходить к переключению.
ПЕРЕД НАЧАЛОМ
Перед тем, как начать эту процедуру, вы должны знать или выполнить следующее:
• Вы вошли в интерфейс командной строки в режиме EXEC.
• Если резервный VSM не находится в стабильном состоянии (состояние должно быть ha-standby), то переключение, инициированное вручную, не может быть выполнено.
КРАТКИЕ ДЕЙСТВИЯ
1. показать статус резервирования системы
2. показать модуль
ПОДРОБНЕЕ
| Команда | Цель | |
|---|---|---|
Шаг 1 | показать статус резервирования системы Пример: n1000v # показать статус резервирования системы Роль резервирования --------------- административный: первичный рабочий: первичный Режим резервирования Настоящий супервайзер (sup-1) ----------------------- Состояние резервирования: активно Состояние супервизора: Активный Внутреннее состояние: активно с режимом ожидания высокой доступности Другой руководитель (sup-2) ------------------------ Состояние резервирования: Ожидание Состояние супервизора: HA standby Внутреннее состояние: режим ожидания высокой доступности | Отображает текущий статус резервирования для VSM (ов). Если вывод показывает следующее, то при необходимости вы можете перейти к переключению системы. • Наличие активного VSM • Наличие резервного VSM в состоянии резервирования HA |
Шаг 2 | показать модуль n1000v # показать модуль | Отображает информацию обо всех доступных VEM и VSM в системе. В выводе команды в столбце «Состояние» должно отображаться «ОК» для коммутационных модулей и статус «Активный» или «Резервный» для модулей супервизора. Если вывод показывает следующее, то при необходимости вы можете продолжить переключение системы: • Наличие активного VSM • Наличие резервного VSM в состоянии резервирования HA |
ПРИМЕР
В этом примере показано, как отобразить информацию обо всех доступных VEM и VSM в системе:
n1000v # показать модуль
Mod Ports Тип модуля Состояние модели
--- ----- -------------------------------- --------- --------- ------------
1 0 Виртуальный модуль супервизора Nexus1000V активен *
2 0 Модуль виртуального супервизора Nexus1000V ha-standby
3248 Модуль виртуального Ethernet Нет данных ОК
Mod Sw Hw
--- --------------- ------
1 4.0 (4) SV1 (0,37) 0,0
2 4,0 (4) SV1 (0,37) 0,0
3 4,0 (4) SV1 (0,37) 0,4
Mod MAC-адрес (а) Серийный номер
--- -------------------------------------- -------- -
1 00-19-07-6c-5a-a8 до 00-19-07-6c-62-a8 NA
2 00-19-07-6c-5a-a8 до 00-19-07-6c-62-a8 NA
3 02-00-0c-00-21-00 до 02-00-0c-00-21-80 NA
Mod Server-IP Server-UUID Имя сервера
--- --------------- ------------------------------- ----- --------------------
1 192.168.48.66 NA NA
2 192.168.48.66 NA NA
3 192.168.48.45 b497bc96-1583-32f1-9062-de3b5d37709c strider.cisco.com
* этот терминальный сеанс
Переключение активного VSM в режим ожидания вручную
Используйте эту процедуру для ручного переключения активного VSM в режим ожидания в системе с двумя супервизорами.
ПЕРЕД НАЧАЛОМ
Перед тем, как начать эту процедуру, вы должны знать или выполнить следующее:
• Вы вошли в активный интерфейс командной строки VSM в режиме EXEC.
• Вы выполнили действия, описанные в разделе «Проверка готовности системы к переключению», и обнаружили, что система готова к переключению.
• Переключение может быть выполнено только в том случае, если в переключателе работают два VSM.
• Если резервный VSM не находится в стабильном состоянии (ha-standby), вы не можете инициировать переключение вручную. Вы увидите следующее сообщение об ошибке:
Не удалось переключиться (резервный режим не готов к переключению в vdc 1)
• После ввода команды system Switchover вы не сможете запустить другой процесс переключения в той же системе, пока не станет доступен стабильный резервный VSM.
• Если переключение не завершится успешно в течение 28 секунд, супервизоры будут сброшены.
• Любая несохраненная рабочая конфигурация, которая была доступна в активном VSM, все еще не сохраняется в новом активном VSM. Вы можете проверить эту несохраненную рабочую конфигурацию с помощью команды show running-config diff . При необходимости сохраните эту конфигурацию, как и в другом VSM (введя команду copy running-config startup-config ).
КРАТКИЕ ДЕЙСТВИЯ
1. переключение системы
2. показать разницу в рабочей конфигурации
3. копировать текущую конфигурацию start-config
ПОДРОБНЕЕ
| Команда | Цель | |
|---|---|---|
Шаг 1 | переключение системы Пример: n1000v # переключение системы | На активном VSM инициирует ручное переключение на резервный VSM. Примечание После того, как вы введете эту команду, вы не сможете запустить другой процесс переключения в той же системе, пока не станет доступен стабильный резервный VSM. Примечание Прежде чем продолжить, подождите, пока переключение завершится и резервный супервизор станет активным. |
Шаг 2 | показать разницу в рабочей конфигурации Пример: n1000v # show running-config diff | (Необязательно) Проверьте разницу между рабочей и начальной конфигурациями. Любая несохраненная рабочая конфигурация в активном VSM также не сохраняется в VSM, который становится активным после переключения. При необходимости сохраните эту конфигурацию в автозагрузке. |
Шаг 3 | копировать текущую конфигурацию запуска конфигурации Пример: n1000v (config) # copy running-config startup-config | (Необязательно) Постоянно сохраняет текущую конфигурацию посредством перезагрузки и перезапуска, копируя ее в конфигурацию запуска. |
ПРИМЕРЫ
В этом примере показано, как переключить активный VSM на резервный VSM, и отображается выход, который появляется на резервном VSM, когда он становится активным VSM.
n1000v # переключение системы
----------------------------
31 марта 2009 г., 04:21:56 n1000v% $ VDC-1% $% SYSMGR-2-HASWITCHOVER_PRE_START: Этот супервизор становится активным (предпусковая фаза).31 марта 2009 г., 04:21:56 n1000v% $ VDC-1% $% SYSMGR-2-HASWITCHOVER_START: Этот руководитель становится активным. 31 марта 2009 г., 04:21:57 n1000v% $ VDC-1% $% SYSMGR-2-SWITCHOVER_OVER: переключение завершено. 31 марта 2009 г., 04:22:03 n1000v% $ VDC-1% $% PLATFORM-2-MOD_REMOVE: Модуль 1 удален (Последовательный число )
В этом примере показано, как отобразить разницу между текущей и начальной конфигурациями:
n1000v # показать различную рабочую конфигурацию
*** Startup-config
--- Рабочая конфигурация
***************
*** 1,38 ****
версия 4.0 (4) SV1 (1)
имя группы функций роли новое
имя роли testrole
имя пользователя пароль администратора 5 $ 1 $ S7HvKc5G $ aguYqHl0dPttBJAhEPwsy1 роль сетевого администратора
telnet server enable
IP-поиск домена
Добавление второго VSM в автономную систему
Используйте этот раздел, чтобы превратить автономную систему в систему с двумя супервизорами, добавив второй VSM.
Этот раздел включает следующие темы:
• Добавление второго VSM в автономную систему
• Замена автономного VSM на первичный VSM
• Проверка перехода на двойную систему VSM
ПЕРЕД НАЧАЛОМ
Перед добавлением второго VSM в автономную систему необходимо знать или выполнить следующее:
• Вы вошли в интерфейс командной строки в режиме EXEC.
• У вас есть Руководство по установке программного обеспечения Cisco Nexus 1000V , версия 4.2 (1) SV1 (4) .
• Хотя первичный и вторичный VSM могут находиться на одном хосте, для улучшения резервирования устанавливайте их на разных хостах и, если возможно, подключайте их к разным вышестоящим коммутаторам.
• При установке второго VSM назначьте ему вторичную роль.
• Вторичный VSM должен иметь интерфейсы контроля, управления и пакетной сети в тех же VLAN, что и первичный VSM.
• Настройте группы портов для двойных виртуальных машин VSM с одинаковыми параметрами на обоих хостах.
• После установки вторичного VSM автоматически происходит следующее:
–Вторичный VSM перезагружается и добавляется в систему.
— Вторичный VSM согласовывается с первичным VSM и становится резервным VSM.
— Резервный VSM синхронизирует конфигурацию и состояние с основным VSM.
Блок-схема: добавление второго VSM в автономную систему
Следующая блок-схема (см. Рисунок 3-1) предназначена для того, чтобы помочь вам в процессе добавления второго VSM в автономную систему. После завершения каждой процедуры вернитесь к блок-схеме, чтобы убедиться, что вы выполнили все необходимые процедуры в правильной последовательности.
Рисунок 3-1 Добавление второго VSM в автономную систему
Замена автономного VSM на первичный VSM
Используйте эту процедуру для изменения роли VSM с автономного в одиночной системе VSM на первичную в двойной системе VSM.
ПЕРЕД НАЧАЛОМ
Перед тем, как начать эту процедуру, вы должны знать или выполнить следующее:
• Вы вошли в интерфейс командной строки в режиме EXEC.
• Переход от автономного VSM к основному вступает в силу немедленно.
КРАТКИЕ ДЕЙСТВИЯ
1. роль резервирования системы первичный
2. показать статус резервирования системы
3. копировать текущую конфигурацию запуска конфигурации
ПОДРОБНЕЕ
| Команда | Цель | |
|---|---|---|
Шаг 1 | Роль резервирования системы первичная Пример: n1000v # роль резервирования системы первичная n1000v # | Изменяет автономный VSM на основной VSM. Смена роли происходит немедленно. |
Шаг 2 | показать статус резервирования системы Пример: n1000v # показать статус резервирования системы | Отображает текущее состояние резервирования для VSM. |
Шаг 3 | копировать текущую конфигурацию запуска конфигурации Пример: n1000v (config) # copy running-config startup-config | Постоянно сохраняет текущую конфигурацию посредством перезагрузки и перезапуска, копируя ее в конфигурацию запуска. |
ПРИМЕР
В этом примере показано, как отобразить текущий статус резервирования системы для VSM:
n1000v # показать статус резервирования системы
Роль резервирования
---------------
административный: первичный
рабочий: первичный
Режим резервирования
---------------
административный: HA
в рабочем состоянии: нет
Настоящий супервайзер (sup-1)
-----------------------
Состояние резервирования: активно
Состояние супервизора: Активный
Внутреннее состояние: активно, без ожидания
Другой руководитель (sup-2)
------------------------
Состояние резервирования: отсутствует
Проверка изменений в системе с двумя VSM
Используйте эту процедуру для проверки перехода с одного VSM на систему с двумя VSM.
ПЕРЕД НАЧАЛОМ
Перед тем, как начать эту процедуру, вы должны знать или выполнить следующее:
• Вы вошли в интерфейс командной строки в режиме EXEC.
• Вы уже изменили одиночную роль VSM с автономной на основную (см. Раздел «Замена автономного VSM на первичный VSM»).
• Вы уже установили второй VSM, используя Руководство по установке программного обеспечения Cisco Nexus 1000V , выпуск 4.2 (1) SV1 (4) .
КРАТКИЕ ДЕЙСТВИЯ
1. показать статус резервирования системы
2. показать модуль
ПОДРОБНЕЕ
| Команда | Цель | |
|---|---|---|
Шаг 1 | показать статус резервирования системы Пример: n1000v # показать статус резервирования системы | Отображает текущее состояние резервирования VSM в системе. |
Шаг 2 | показать модуль Пример: n1000v # показать модуль | Отображает информацию обо всех доступных VSM и VEM в системе. |
ПРИМЕРЫ
В этом примере показано, как отобразить текущий статус резервирования для VSM в системе.В этом примере первичный и вторичный VSM показаны после перехода от одиночной системы VSM к двойной системе VSM.
n1000v # показать статус резервирования системы
Роль резервирования --------------- административный: первичный рабочий: первичный
Режим резервирования --------------- административный: HA в рабочем состоянии: HA
Настоящий супервайзер (sup-1) ----------------------- Состояние резервирования: активно Состояние супервизора: Активный Внутреннее состояние: активно с режимом ожидания высокой доступности
Другой супервизор (sup-2)
————————
Состояние резервирования: Ожидание
Состояние супервизора: Ожидание HA
Внутреннее состояние: Ожидание HA
В этом примере показано, как отобразить информацию обо всех доступных VSM и VEM в системе.В этом примере первичный и вторичный VSM показаны после перехода от одиночной системы VSM к двойной системе VSM. Кроме того, в модуле 3 есть один VEM.
n1000v # показать модуль
Mod Ports Тип модуля Состояние модели
--- ----- -------------------------------- --------- --------- ------------
1 0 Виртуальный модуль супервизора Nexus1000V активен *
2 0 Модуль виртуального супервизора Nexus1000V ha-standby
3248 Модуль виртуального Ethernet Нет данных ОК
Mod Sw Hw
--- --------------- ------
1 4.0 (4) SV1 (0,37) 0,0
2 4,0 (4) SV1 (0,37) 0,0
3 4,0 (4) SV1 (0,37) 0,4
Mod MAC-адрес (а) Серийный номер
--- -------------------------------------- -------- -
1 00-19-07-6c-5a-a8 до 00-19-07-6c-62-a8 NA
2 00-19-07-6c-5a-a8 до 00-19-07-6c-62-a8 NA
3 02-00-0c-00-21-00 до 02-00-0c-00-21-80 NA
Mod Server-IP Server-UUID Имя сервера
--- --------------- ------------------------------- ----- --------------------
1 192.168.48.66 NA NA
2 192.168.48.66 NA NA
3 192.168.48.45 b497bc96-1583-32f1-9062-de3b5d37709c strider.cisco.com
* этот терминальный сеанс
Замена резервного в системе с двумя VSM
Используйте эту процедуру для замены резервного / вторичного VSM в системе с двумя VSM.
Примечание Отказ оборудования — для этой процедуры необходимо выключить питание и переустановить VSM. В это время ваша система будет работать с одним VSM.
Шаг 1 Выключите резервный VSM.
Шаг 2 Установите новый VSM в качестве резервного с тем же идентификатором домена, что и существующий VSM, используя процедуру, описанную в разделе «Установка и настройка виртуальной машины VSM» в Руководстве по установке программного обеспечения Cisco Nexus 1000V , выпуск 4.2 (1) SV1 (4) .
После добавления нового VSM в систему он синхронизируется с существующим VSM.
Замена активного элемента в системе с двумя VSM
Используйте эту процедуру для замены активного / основного VSM в системе с двумя VSM.
ПЕРЕД НАЧАЛОМ
Перед тем, как начать эту процедуру, вы должны знать или выполнить следующее:
• Вы вошли в интерфейс командной строки в режиме EXEC.
• Вы должны настроить группы портов так, чтобы новый первичный VSM не мог взаимодействовать с вторичным VSM или любым из VEM во время установки. VSM с ролью первичного или вторичного резервирования имеют встроенные механизмы для обнаружения и разрешения конфликта между двумя VSM в активном состоянии. Чтобы избежать этих механизмов во время настройки нового первичного VSM, необходимо изолировать новый первичный VSM от вторичного VSM.
Примечание Отказ оборудования — для этой процедуры требуется выключить питание и переустановить VSM.В это время ваша система будет работать с одним VSM.
Шаг 1 Выключите активный VSM.
Вторичный VSM становится активным.
Шаг 2 На vSphere Client измените конфигурацию группы портов для нового первичного VSM, чтобы предотвратить обмен данными с вторичным VSM и VEM во время настройки.
Пример изменения групп портов и профилей портов, назначенных интерфейсам VSM в vSphere Client, см. В Руководстве по установке программного обеспечения Cisco Nexus 1000V , выпуск 4.2 (1) SV1 (4)
Шаг 3 Установите новый VSM в качестве основного с тем же идентификатором домена, что и существующий VSM, используя раздел «Установка и настройка виртуальной машины VSM» в Руководстве по установке программного обеспечения Cisco Nexus 1000V , выпуск 4.2 (1) SV1 ( 4) .
Шаг 4 Сохраните конфигурацию.
Шаг 5 Выключите ВМ.
Шаг 6 На vSphere Client измените конфигурацию группы портов для нового первичного VSM, чтобы разрешить обмен данными с вторичным VSM и VEM.
Шаг 7 Включите новый первичный VSM.
Новый первичный VSM запускается и автоматически синхронизирует все данные конфигурации с вторичным VSM, который в настоящее время является активным VSM. Поскольку существующий VSM активен, новый основной VSM становится резервным VSM и получает все данные конфигурации от существующего активного VSM.
Изменение идентификатора домена в системе с двумя VSM
Используйте эту процедуру для изменения идентификатора домена в
Lawo VSM
DAS KONZEPT
Ein unabhängiges Kontrollsystem — Alles unter Kontrolle, alles unter einem Dach.
Heutzutage sehen sich Broadcaster mit immer neuen Herausforderungen konfrontiert. Budget, Technik и Personalressourcen оптимальное обслуживание, это лучшее из того, что нужно. Nur komplett integrierte Systeme können die Konzepte rund um gemeinsame Quellennutzung und verbesserte Arbeitsabläufeffektiv umsetzen.
Normalerweise sind Flexibilität und Benutzerfreundlichkeit der Router-Steuerung entscheidende Faktoren bei der-Auswahl. Stellen Sie sich stattdessen eine einzige Аппаратное обеспечение для: ein unabhängiges Steuerungssystem, das die Bedienung, Конфигурация и системная интеграция Ihres видеомаршрутизаторы, видеокоммутаторы, аудиомаршрутизаторы, Mischpults, системы внутренней связи, системы Multiviewer, модульное оборудование для свободного доступа.Oft lassen sich Hardware-Systemlösungen eines einzigen Herstellers am besten integrieren. Als Konsequenz gilt dann aber auch oft, dass bestimmte herstellerspezifische technische Vorgaben und Betriebskonzepte angewendet werden müssen. Sollten dann aufgrund technischer Entwicklungen in der Zukunft jedoch einzelne Komponenten ausgetauscht oder erneuert werden müssen, sind Sie in puncto Auswahlmöglichkeiten und Flexibilität stark eingeschränkt.
Sollte Ihnen aber eine Ideallösung nicht jederzeit Flexibilität bieten und die Freiheit garantieren, unter aller auf dem Markt erhältlicher Technik auszuwählen? Und sollten sich diese verschiedenen Elemente nicht durch eine integrierte Steuerung von einem einzigen Steuerungssystem kontrollieren lassen? So könnten Arbeitsabläufe und Benutzeroberflächen genau auf Individual Anforderungen zugeschnitten werden.Eine zusätzliche, umfangreiche Design Toolbox, durch die der Kunde Oberflächen einfach und ohne Hersteller-Support anpassen kann, würde die Anpassungsfähigkeit dieses Systems an stetig steigende und sich verändernde Anforderungen und Erwart.
Понимание методов стабилизации | Блог COMSOL
Большинство методов численного моделирования (конечные элементы, конечные объемы и конечные разности) требуют методов стабилизации при моделировании транспортных приложений, в основе которых лежит конвекция, а не диффузия.При использовании метода конечных элементов (МКЭ) стабилизация означает добавление небольшого количества искусственной диффузии. Это приводит к более надежным и быстрым вычислениям. Здесь мы даем представление о влиянии стабилизации на вашу числовую модель. Мы также рассмотрим альтернативный численный метод, который очень эффективен и не требует стабилизации.
Когда нам нужна стабилизация?
COMSOL Multiphysics использует метод конечных элементов (МКЭ), который является хорошо известным и устоявшимся подходом к численному решению основных дифференциальных уравнений в частных производных (УЧП).При решении приложений механики твердого тела или явлений переноса, вызванных диффузией, подход прост. Однако известно, что для задач переноса с преобладанием конвекции такой подход может приводить к численным нестабильностям, а именно к колебаниям в решении. COMSOL Multiphysics автоматически использует методы стабилизации для предотвращения этого явления. Тем не менее, некоторые знания могут быть действительно полезны для понимания производительности транспортных симуляций.
Начнем с общего уравнения переноса конвекции-диффузии для неизвестного решения u:
\ frac {\ partial u} {\ partial t} + \ beta \ cdot \ nabla u = \ nabla \ cdot (c \ nabla u) + F
Параметры \ beta и c относятся к вектору конвективной скорости и коэффициенту диффузии, соответственно, в то время как F представляет собой произвольный исходный член.Это уравнение может представлять собой уравнение энергии, то есть уравнение теплопереноса, уравнения переноса массы (используемые для переноса химических веществ), уравнения Навье-Стокса для переноса количества движения в жидкостях или любое другое уравнение переноса. Для однородной сетки с функциями формы первого порядка математически доказано, что числовая нестабильность возникает, когда число Пекле элемента \ mathrm {Pe} превышает 1:
\ mathrm {Pe}: = \ frac {\ | \ beta \ | h} {2c}> 1
, где h — размер элемента сетки.
Число Пекле элемента связывает конвективный и диффузионный эффекты. Либо большая конвективная, либо малая диффузионная активность приводит к числу Пекле больше 1. Но это верно только наполовину, поскольку размер элемента сетки также играет важную роль. Чем выше разрешение сетки, тем меньше число Пекле элемента. Это также означает, что для каждого ненулевого члена диффузии существует разрешение сетки, которое заставляет число Пекле элемента принимать значение меньше 1 во всей вычислительной области.
Однако такая сетка может быть дорогостоящей с вычислительной точки зрения или даже невозможной. Методы стабилизации позволяют моделировать на более грубых сетках, что значительно снижает вычислительную нагрузку.
Пример массового транспорта
Чтобы лучше понять влияние методов стабилизации, давайте рассмотрим пример и решим его с помощью COMSOL Multiphysics. Мы рассматриваем нестационарную задачу массопереноса. Представим, что у нас есть труба длиной три метра, в которой происходит поршневой поток (поток с постоянной скоростью по поперечному сечению трубы).Скорость поршневого потока 1 м / с. В начале эксперимента (т.е. при t = 0) в воде растворяется химическое вещество со следующей концентрацией:
Начальная концентрация (синим цветом) установлена на 1 для x 1 м. На этом графике также показан аналитический раствор для концентрации при t = 1 с. Поскольку скорость жидкости равна 1 м / с, скачок концентрации должен располагаться в точке x = 1 м. Далее наша цель — найти эволюцию профиля концентрации как функцию времени.3}. Размер ячейки \ Delta x = 0,05 приводит к числу элементов Пекле около 25 \ cdot10 6 , что намного превышает критическое значение 1. После запуска решающей программы, зависящей от времени, до t = 1 с, следующее решение (сплошная синяя линия) получится без стабилизации . Для сравнения мы также показываем аналитическое решение (пунктирная красная линия).
Мы ясно видим, что расчетное решение бесполезно. Колебания не только присутствуют вокруг градиентов концентрации, но и распространяются по всей области.Эти колебания могут возникать, когда число Пекле превышает единицу и существует любое из следующих условий:
- Зависящее от пространства начальное условие, которое сетка не разрешает
- Граничное условие Дирихле, приводящее к решению, содержащему крутой градиент около границы и образующему пограничный слой
- Небольшой начальный диффузионный член, близкий к непостоянному источнику или непостоянному граничному условию Дирихле
Этот пример массопереноса иллюстрирует первую точку, поскольку мы выбрали пространственно-зависимый начальный профиль концентрации.{-9}
Такой маленький размер элемента сетки для всего домена приведет к более чем 1 миллиарду элементов. Этого должно быть достаточно, чтобы рассмотреть другой вариант.
Стабилизация с помощью COMSOL Multiphysics
Все транспортные интерфейсы, такие как теплопередача, поток жидкости или перенос веществ, автоматически используют стабилизацию. Чтобы увидеть соответствующие настройки, сначала нужно включить «Стабилизацию», щелкнув значок глаза над построителем моделей.Затем в физическом узле вы найдете два дополнительных раздела, а именно «Последовательная стабилизация» и «Несогласованная стабилизация», как показано на снимке экрана интерфейса Transport of Diluted Species :
Как сделать видимыми настройки стабилизации.
Настройки стабилизации в интерфейсе Transport of Diluted Species .
По умолчанию, постоянная стабилизация проверяется, потому что этот метод хорошо работает для большинства приложений.
В следующем разделе мы кратко объясним идею обоих методов и покажем соответствующие результаты для примера массового транспорта. Основная идея всех методов стабилизации заключается в добавлении дополнительных диффузионных членов, чтобы уменьшить число Пекле. Как бы просто это ни звучало, такое введение дополнительной диффузии может быть реализовано множеством различных способов.
Непоследовательная стабилизация: изотропная диффузия
Самый простой подход — определить коэффициент искусственной диффузии c _ {\ mathrm {art}} как:
c _ {\ mathrm {art}} = \ delta h \ | \ beta \ |
и прибавьте его к физическому коэффициенту диффузии c, получив общую диффузию c + c _ {\ mathrm {art}}.Параметр \ delta — это параметр настройки, с помощью которого можно регулировать количество искусственной диффузии. Соответствующий элемент номер Пекле тогда определяется как:
\ mathrm {Pe} = \ frac {h \ | \ beta \ |} {2 (c + c _ {\ mathrm {art}})} = \ frac {h \ | \ beta \ |} {2c + 2 \ дельта h \ | \ beta \ |}
Чтобы убедиться, что число Пекле не превышает 1, необходим параметр настройки \ delta = 0,5. На практике для стабилизации расчета часто бывает достаточно меньшего значения. Вот почему программа COMSOL предлагает использовать \ delta = 0.25. Поскольку метод добавляет диффузию во всех направлениях, он обозначен как Изотропная диффузия . Это называется несогласованным, потому что он добавляет определенное количество диффузии независимо от того, насколько близко численное решение к точному.
Важно отметить, что величина искусственной диффузии зависит от размера элемента сетки. С одной стороны, высокое разрешение сетки означает на меньше изотропной диффузии , но больше вычислительных затрат. С другой стороны, более крупная сетка требует на изотропной диффузии больше и может значительно повлиять на раствор.Нам нужно найти баланс между точностью и усилием.
Это сравнение профиля концентрации при t = 1 показывает, что для той же сетки (\ Delta x = 0,05) непостоянная стабилизация (синяя линия) вносит гораздо больше диффузии, чем последовательная стабилизация (зеленая линия). Это причина, по которой последовательная стабилизация является выбором по умолчанию для всех интерфейсов физики транспорта. Об этом мы и поговорим дальше.
Последовательная стабилизация: обтекаемость и диффузия при боковом ветре
В отличие от несовместимого метода, согласованный метод дает минус числовой диффузии, чем ближе численное решение к точному.Другими словами, диффузия не добавляется в областях, где сетка достаточно мелкая.
Совет. Подробнее о математических деталях и справочной информации можно прочитать в Справочном руководстве COMSOL Multiphysics .
Метод обтекаемой диффузии добавляет диффузию только в направлении обтекаемой линии, которое также известно как восходящее движение. Как видно на следующем графике, с помощью этого метода обычно можно избежать усиливающих колебаний (синяя линия), но крутые градиенты все же могут приводить к локальным возмущениям (известным как выбросы или выбросы).Чтобы решить эту проблему, мы также используем диффузию бокового ветра.
Стабилизация бокового ветра (зеленая линия) не только добавляет диффузию в поперечном направлении, но также улавливает неоднородности и, следовательно, устраняет числовые недо- и выбросы. Последовательные методы стабилизации (обтекание вместе со стабилизацией при боковом ветре) обычно более эффективны, потому что увеличение разрешения сетки быстрее приводит к точному решению, чем непостоянная стабилизация. Это, в свою очередь, означает, что поиск физически приемлемого решения требует меньше вычислительных затрат и времени.
Предыдущий график показывает, что последовательная стабилизация устраняет все колебания и числовые выбросы или недолеты, близкие к резким градиентам концентрации. Однако результаты далеки от аналитического решения. Это связано с тем, что сетка очень грубая (\ Delta x = 0,05) по сравнению с размером переходной области в начальном профиле концентрации (\ Delta transition = 0,1) и тем фактом, что используются элементы первого порядка. Следующий результат показывает, что по мере улучшения сетки решение сходится к точному:
Последовательные методы стабилизации гарантируют, что проблема будет хорошо решена в космосе.Поскольку мы решаем проблему, зависящую от времени, также рекомендуется посмотреть на настройки решателя, зависящие от времени, чтобы убедиться, что проблема также хорошо решена вовремя. В COMSOL Multiphysics точность решающей программы, зависящей от времени, контролируется допусками относительной и абсолютной погрешности.
На следующем графике показано решение как функция заданных пользователем допусков ошибок:
Числовое превышение наблюдается, когда допуски ошибок слишком велики и исчезают для допусков 1e -3 .Более жесткие допуски приводят к более точным результатам, но увеличивают вычислительную нагрузку. По умолчанию допуски относительной и абсолютной погрешности равны 1e -2 и 1e -3 соответственно.
Советы по физике
1. Транспортировка разбавленных и концентрированных видов
Интерфейс Transport of Diluted Species предлагает дополнительные расширенные параметры. Один из вариантов — внутренний расчет остатка. В целях экономии времени чаще всего не требуется вычислять полную невязку для текущего решения, а лучше аппроксимировать ее, пренебрегая производными компонент тензора диффузии.
Кроме того, вы можете выбирать между двумя различными методами диффузии бокового ветра: «Do Carmo and Galeão» (по умолчанию) и «Codina». Первый сводит к минимуму перерегулирование и недорезание и работает также с анизотропными сетками. В случае проблем сходимости даже для оптимальных сеток следует переключиться на вторую постановку. Формулировка «Codina» менее расплывчата по сравнению с вариантом «Do Carmo and Galeão», но может привести к большему количеству недолетов и перерегулирований.
2. Поток жидкости
В общем случае не следует изменять настройки стабилизации в интерфейсах потока жидкости. Уравнения Навье-Стокса нестабильны при использовании элементов P1 + P1 по умолчанию независимо от числа Пекле и всегда требуют последовательной стабилизации (см. Работу И. Бабушки и Ф. Бреззи для получения более подробной информации). Pm + Pn означает, что скорость определяется с помощью вычислительных элементов порядка m, а давление определяется с помощью элементов порядка n.
Последовательная стабилизация по умолчанию может быть удалена только тогда, когда скорость определяется в более высоком порядке, чем давление (P2 + P1 и P3 + P2), и когда число Пекле мало. Эти вычислительные элементы (P2 + P1 и P3 + P2) следует использовать только в том случае, если поток хорошо разрешен сеткой. В этом случае влияние условий стабилизации на решение в любом случае незначительно, и их удаление не повлияет на ваши результаты.
3. Моделирование на основе уравнений
Физические интерфейсы в программном обеспечении COMSOL включают методы стабилизации.Однако, если вы работаете со своими собственными уравнениями переноса, вам нужно будет сделать обзор литературы по методам стабилизации для вашего конкретного приложения и самостоятельно реализовать уравнения стабилизации. Первая попытка может состоять в добавлении искусственной диффузии к вашему параметру диффузии вручную. В этом примере показано, как реализовать условия стабилизации вручную.
Заключение и альтернативный метод
Нет необходимости менять настройки стабилизации по умолчанию! Наши разработчики из COMSOL проделали фантастическую работу, добавив последовательное искусственное распространение, чтобы вам не приходилось беспокоиться о проблемах со стабильностью.Последовательная стабилизация помогает, когда сетка слишком грубая, и скрывается, когда уравнения хорошо разрешаются сеткой. Однако имейте в виду, что есть другой способ решения проблем массопереноса без какой-либо искусственной или вязкой диффузии.
Да, в отличие от методов на основе сеток (т.е. конечных элементов, конечных разностей, конечных объемов), методы на основе лагранжевых частиц могут очень эффективно моделировать проблемы с большим числом Пекле без добавления искусственной диффузии. Этот альтернативный метод доступен в модуле отслеживания частиц.Сертифицированный консультант COMSOL, компания Veryst Engineering, в сотрудничестве с Nordson EFD разработали вычислительные модели своих ламинарных статических смесителей и нашли способы улучшить и оптимизировать их производительность. Используя COMSOL Multiphysics и модуль отслеживания частиц, они смогли исключить числовую диффузию из моделирования для получения более точного решения, используя гораздо меньше вычислительных ресурсов, чем при использовании методов на основе сетки.
Чтобы вы начали работать с COMSOL Multiphysics, наша библиотека моделей включает в себя пример статического микшера, решенного обоими методами (перенос физики разбавленных частиц на основе сетки и физики трассировки частиц).Опять же, дополнительные сведения о числовой стабилизации и ссылки можно найти в Справочном руководстве COMSOL Multiphysics .
.