В 1948 г. в США и Европе вышла книга американского математика Норберта Винера «Кибернетика, или управление и связь в животном и машине», которая провозгласила рождение новой науки — кибернетики. Обсудим, что такое управление с кибернетической точки зрения. Управление есть целенаправленное воздействие управляющего объекта на объект управления, осуществляемое для организации функционирования объекта управления по заданной программе. Простейшая ситуация — два объекта: один — управляющий, другой — управляемый. Например, человек и телевизор, хозяин и собака, светофор и автомобиль. В первом приближении взаимодействие между такими объектами можно описать следующей схемой: В приведенных примерах управляющее воздействие производится в разной форме: человек нажимает клавишу или поворачивает ручку управления телевизором, хозяин голосом подает команду собаке, светофор разными цветами управляет движением автомобилей на перекрестке. В таком случае объект управления можно назвать исполнителем управляющего алгоритма.  В приведенных выше примерах телевизор, собака, автомобиль являются исполнителями управляющих алгоритмов, направленных на вполне конкретные цели (посмотреть интересующую передачу, выполнить определенное задание хозяина, благополучно проехать перекресток). В приведенных выше примерах телевизор, собака, автомобиль являются исполнителями управляющих алгоритмов, направленных на вполне конкретные цели (посмотреть интересующую передачу, выполнить определенное задание хозяина, благополучно проехать перекресток). Итак, мы видим, что кибернетический подход объединяет как материальные, так и информационные процессы, в которых имеет место управление. Если внимательно обдумать рассматриваемые примеры, то приходишь к выводу, что строго в соответствии с рассмотренной схемой работает только система «светофор — автомобили». Светофор «не глядя» управляет движением машин, не обращая внимание на обстановку на перекрестке. Совсем иначе протекает процесс управления телевизором или собакой. Прежде чем отдать очередную команду, человек смотрит на состояние объекта управления, на результат выполнения предыдущей команды. Если он не нашел нужную передачу на данном канале, то переключит телевизор на следующий канал; если собака не выполнила команду «лежать!», хозяин повторит эту команду.  Из этих примеров можно сделать вывод, что управляющий не только отдает команды, но и принимает информацию от объекта управления о его состоянии. Этот процесс называется обратной связью. Из этих примеров можно сделать вывод, что управляющий не только отдает команды, но и принимает информацию от объекта управления о его состоянии. Этот процесс называется обратной связью. Обратная связь — это процесс передачи информации о состоянии объекта управления к управляющему объекту. Системы управления с обратной связью называются замкнутыми системами управления, а системы управления, не имеющие корректирующей обратной связи, — разомкнутыми системами. Если вместо светофора на перекрестке дорог работает милиционер-регулировщик, то управление движением станет более рациональным. Регулировщик следит за скоплением машин на пересекающихся дорогах и дает «зеленую улицу» в том направлении, в котором в данный момент это нужнее. Нередко из-за «безмозглого» управления светофора на дорогах возникают «пробки», и тут непременно приходит на помощь регулировщик. Таким образом, при наличии обратной связи и «интеллектуального» управляющего, алгоритмы управления могут иметь сложную структуру, содержащую альтернативные команды (ветвления) и повторяющиеся команды (циклы).  Для функционировании такой системы, во-первых, между ЭВМ и объектом управления должна быть обеспечена прямая и обратная связь; во-вторых, в память компьютера должна быть заложена программа управления (алгоритм, записанный на языке программирования). Поэтому такой способ управления называют программным управлением. Еще раз кратко сформулируем суть кибернетического подхода к процессу управления: — управление есть информационное взаимодействие между объектом управления и управляющей системой; — управляющая информация передается по линии прямой связи в виде команд управления; — по линии обратной связи передается информация о состоянии объекта управления ; — последовательность управляющих команд определяется алгоритмом управления; — без учета обратной связи алгоритм может быть только линейным, при наличии обратной связи алгоритм может иметь сложную структуру, содержащую ветвления и циклы.  Кибернетика по такой схеме описывает управление в технических системах, в живом организме и даже в человеческом обществе. Специалисты, работающие в этой области, исследуют и проектируют различные технические управляющие системы, начиная от достаточно простых систем автоматического регулирования до сложных автоматизированных систем управления – АСУ. В рамках технической кибернетики развивается и теория построения вычислительных машин, а также логические методы синтеза дискретных управляющих устройств. Экономическая кибернетика – наука, где расчёты и модели экономических процессов столь же привычны, как и в ранее формализованных науках. Наконец, социальная кибернетика изучает процессы управления, протекающие в человеческом обществе (модели распространения слухов, модели возникновения лидерства и т.  п.). п.). В современном обществе кибернетика уступила пальму первенства информатике, решающей многие задачи, которые поставила перед собой кибернетика. Но значение кибернетики как науки об общих принципах управления в живых и неживых системах, в искусственных системах и обществе сохраняется и сейчас. |
| ||



ОглавлениеМИХАЙЛОВА КРИТЕРИЙМНОГОВАРИАНТНЫХ ЗАДАЧ РЕШЕНИЕ МНОГОГРАННОЕ МНОЖЕСТВО МНОГОГРАННЫЙ КОНУС МНОГОЗНАЧНЫЕ СХЕМЫ МНОГОКОНТУРНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОКРИТЕРИАЛЬНОСТИ ПРОБЛЕМА МНОГОМЕРНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОПОЛЮСНИК КОНТАКТНЫЙ МНОГОПОЛЮСНИК КОНТАКТНЫЙ РАЗДЕЛИТЕЛЬНЫЙ МНОГОПОЛЮСНИК КОНТАКТНЫЙ УНИВЕРСАЛЬНЫЙ МНОГОПРОГРАММНАЯ ОБРАБОТКА ИНФОРМАЦИИ, мультипрограммная обработка информации МНОГОТОЧЕЧНАЯ КРАЕВАЯ ЗАДАЧА МНОГОШАГОВОГО ПРОЦЕССА ПРОИЗВОДСТВА МОДЕЛЬ МНОГОШАГОВОГО ПРОЦЕССА РАСПРЕДЕЛЕНИЯ МОДЕЛЬ МНОГОШАГОВЫЕ ЗАДАЧИ МНОГОЭТАПНОЕ ОБСЛУЖИВАНИЕ МНОЖЕСТВ ТЕОРИЯ МНОЖИТЕЛЬНО-ДЕЛИТЕЛЬНЫЕ УСТРОЙСТВА МОДЕЛИ ОБЪЕКТОВ РАСПОЗНАВАНИЯ МОДЕЛИ ПРОИЗВОДСТВА МОДЕЛИ РАВНОВЕСИЯ МОДЕЛИ РОСТА МОДЕЛИ ЭКОНОМИКИ МОДЕЛИРОВАНИЕ ВЕСТИБУЛЯРНОГО АНАЛИЗАТОРА МОДЕЛИРОВАНИЕ ВОСПРИЯТИЯ МОДЕЛИРОВАНИЕ ЖИВЫХ СИСТЕМ на молекулярном уровне МОДЕЛИРОВАНИЕ ИНЖЕНЕРНЫХ СЕТЕЙ НА АВМ МОДЕЛИРОВАНИЕ МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ МЫШЛЕНИЯ МОДЕЛИРОВАНИЕ НА СПЛОШНЫХ СРЕДАХ, электрическое моделирование МОДЕЛИРОВАНИЕ ПАМЯТИ МОДЕЛИРОВАНИЕ ПРОЦЕССОВ РАСПОЗНАВАНИЯ И ОБУЧЕНИЯ РАСПОЗНАВАНИЮ НА ЦВМ МОДЕЛИРОВАНИЕ ПСИХИЧЕСКИХ ФУНКЦИЙ МОДЕЛИРОВАНИЕ СЕНСОРНЫХ СИСТЕМ МОДЕЛИРОВАНИЕ СИСТЕМЫ «ЧЕЛОВЕК—МАШИНА» МОДЕЛИРОВАНИЕ ФИЗИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЦВМ ИМИТАЦИОННОЕ МОДЕЛИРОВАНИЕ ЭЛЕКТРОМАГНИТНЫХ ПОЛЕЙ НА ЦВМ МОДЕЛЬ ЗРИТЕЛЬНОГО АНАЛИЗАТОРА МОДЕЛЬ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ НЕРВНОЙ КЛЕТКИ МОДЕЛЬ ПЕРЕМЕННОЙ СТРУКТУРЫ МОДЕЛЬ СЛУХОВОГО АНАЛИЗАТОРА МОДЕЛЬ «СМЫСЛ-ТЕКСТ» МОДЕЛЬ ФИЗИЧЕСКАЯ МОДЕЛЬ ЧУВСТВИТЕЛЬНОСТИ МОДУЛЯТОР МОДУЛЯЦИЯ ИМПУЛЬСНАЯ «МОЗГОВОЙ ШТУРМ» МОМЕНТОВ МЕТОД МОНИТОР МОНОТОННЫЕ ФУНКЦИИ АЛГЕБРЫ ЛОГИКИ МОНТЕ-КАРЛО МЕТОД «МППИ-1», машина первичной переработки информации МУЛЬТИВИБРАТОР МУЛЬТИПРОГРАММИРОВАНИЕ МУЛЬТИПРОГРАММНАЯ ОБРАБОТКА ИНФОРМАЦИИ МУЛЬТИПРОЦЕССОРНЫЙ РЕЖИМ МУЛЬТИУСТОЙЧИВЫЕ СИСТЕМЫ МУРА АВТОМАТ МЫСЛИТЕЛЬНОЙ СПОСОБНОСТИ УСИЛИТЕЛЬ НАБЛЮДАЕМОСТИ И УПРАВЛЯЕМОСТИ УСЛОВИЯ НАБОРНОЕ ПОЛЕ НАГРУЖЕННОЕ РЕЗЕРВИРОВАНИЕ НАДЁЖНОСТЬ КИБЕРНЕТИЧЕСКИХ СИСТЕМ НАДЁЖНОСТЬ РАСПОЗНАВАНИЯ НАИМЕНЬШИХ КВАДРАТОВ МЕТОД «НАИРИ» НАИСКОРЕЙШЕГО СПУСКА МЕТОД НАЙКВИСТА КРИТЕРИЙ НАКАПЛИВАЮЩИЕ СХЕМЫ НАКОПИТЕЛЬ, блок хранения информации НАКОПИТЕЛЬ НА МАГНИТНОЙ ЛЕНТЕ НАРАБОТКА НА ОТКАЗ НАРАБОТКА НА СБОЙ НАУКА УПРАВЛЕНИЯ НАУКОВЕДЕНИЕ НАУЧНАЯ ОРГАНИЗАЦИЯ ТРУДА (НОТ) НАУЧНО-ИНФОРМАЦИОННАЯ ДЕЯТЕЛЬНОСТЬ НАУЧНО-ТЕХНИЧЕСКОЕ ПРОГНОЗИРОВАНИЕ НАУЧНО-ТЕХНИЧЕСКОЙ ИНФОРМАЦИИ ОБРАБОТКА НАУЧНЫЙ СОВЕТ ПО КОМПЛЕКСНОЙ ПРОБЛЕМЕ «КИБЕРНЕТИКА» АН СССР НАУЧНЫЙ СОВЕТ ПО ПРОБЛЕМЕ «КИБЕРНЕТИКА» АН УССР НЕЗАВИСИМОСТЬ в теории вероятностей, статистическая независимость НЕЙРОБИОНИКА НЕЙРОКИБЕРНЕТИКА НЕЙРОН НЕЙРОН ФОРМАЛЬНЫЙ НЕЙРОННЫЕ СЕТИ НЕКОРРЕКТНО ПОСТАВЛЕННЫЕ ЗАДАЧИ НЕКОРРЕКТНО ПОСТАВЛЕННЫХ ЗАДАЧ СПОСОБЫ РЕШЕНИЯ.  НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ НЕЛИНЕЙНЫЙ ЭЛЕМЕНТ АВМ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АНАЛИЗ НЕ НАГРУЖЕННОЕ РЕЗЕРВИРОВАНИЕ НЕОДНОРОДНАЯ СЕТЕВАЯ ЗАДАЧА НЕОДНОРОДНЫЙ ПОТОК В СЕТИ НЕОПРЕДЕЛЕННОСТЬ В УПРАВЛЕНИИ НЕПРЕРЫВНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СИНТЕЗ НЕПРОТИВОРЕЧИВОСТЬ СИСТЕМЫ АКСИОМ, совместимость, корректность НЕРАЗРЕШИМЫЕ АЛГОРИТМИЧЕСКИЕ ПРОБЛЕМЫ «НИППОН ЭЛЕКТРИК КОМПАНИ» (Nippon Electric Company, Ltd) «ННБ», набор нелинейных блоков НОРМА ВЕКТОРА НОРМА МАТРИЦЫ НОРМАЛЬНАЯ ФОРМА МИНИМАЛЬНАЯ НОРМАЛЬНАЯ ФОРМА СОВЕРШЕННАЯ НОРМАЛЬНАЯ ФОРМА СОКРАЩЕННАЯ НОРМАЛЬНОЕ РАСПРЕДЕЛЕНИЕ НОРМАЛЬНЫЕ АЛГОРИФМЫ, нормальные алгоритмы НОСИТЕЛЬ ИНФОРМАЦИИ НУЛЕВЫХ СОБСТВЕННЫХ ПРОВОДИМОСТЕЙ УЗЛОВ МЕТОД НУЛЬ-ОРГАН, сравнивающее устройство, компаратор НУМЕРАЦИЙ ТЕОРИЯ НЬЮТОНА ОБОБЩЕННЫЙ МЕТОД НЬЮТОНА ФОРМУЛЫ ИНТЕРПОЛИРОВАНИЯ ОБЛАСТЬ УПРАВЛЕНИЯ ОБЛЕГЧЁННОЕ РЕЗЕРВИРОВАНИЕ ОБОБЩЁННЫЕ ФУНКЦИИ ОБОБЩЕННЫХ ГРАДИЕНТОВ МЕТОД ОБРАБОТКА ДАННЫХ ПОСЛЕДОВАТЕЛЬНАЯ ОБРАБОТКА ДАННЫХ ПРОИЗВОЛЬНАЯ ОБРАБОТКА ИНФОРМАЦИИ В РЕАЛЬНОМ масштабе времени ОБРАБОТКА ИНФОРМАЦИИ В РЕЖИМЕ РАЗДЕЛЕНИЯ ВРЕМЕНИ ОБРАБОТКИ ДАННЫХ СИСТЕМА ОБРАЗ, или распознаваемый класс, в кибернетике ОБРАТИМОСТИ ПРИНЦИП ОБРАТИМЫЕ ЭЛЕМЕНТЫ И МОДЕЛИ ОБРАТНАЯ СВЯЗЬ ОБРАТНЫХ ОПЕРАТОРОВ МЕТОД ОБУСЛОВЛЕННОСТИ ЧИСЛО ОБУЧАЮЩАЯ ВЫБОРКА ОБУЧАЮЩАЯ МАШИНА ОБУЧАЮЩАЯ ПРОГРАММА ОБУЧЕНИЕ РАСПОЗНАВАНИЮ ОБРАЗОВ ОГРАНИЧЕНИЕ ФАЗОВЫХ КООРДИНАТ ОГРАНИЧИТЕЛЬ АМПЛИТУДЫ ОДНОРОДНАЯ СЕТЕВАЯ ЗАДАЧА ОДНОРОДНЫЙ ПОТОК В СЕТИ ОДНОТОЧЕЧНАЯ КРАЕВАЯ ЗАДАЧА ОКРУГЛЕНИЯ ПОГРЕШНОСТЬ ОПЕРАТИВНОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО (ОЗУ) ОПЕРАТИВНОЕ РУКОВОДСТВО ОПЕРАТИВНО-ПРОИЗВОДСТВЕННАЯ ИНФОРМАЦИЯ ОПЕРАТОР ОПЕРАТОР АВТОМАТНЫЙ ОПЕРАТОР ЗАДЕРЖКИ ОПЕРАТОР ПРИСВАИВАНИЯ ОПЕРАТОР ЭЛЕМЕНТАРНЫЙ ОПЕРАТОР ЭЛЕМЕНТНЫЙ ОПЕРАТОРНАЯ СХЕМА ОПЕРАТОРНЫЕ УРАВНЕНИЯ ОПЕРАТОРНЫЙ МЕТОД ПРОГРАММИРОВАНИЯ ОПЕРАТОРНЫХ УРАВНЕНИЙ СПОСОБЫ РЕШЕНИЯ. 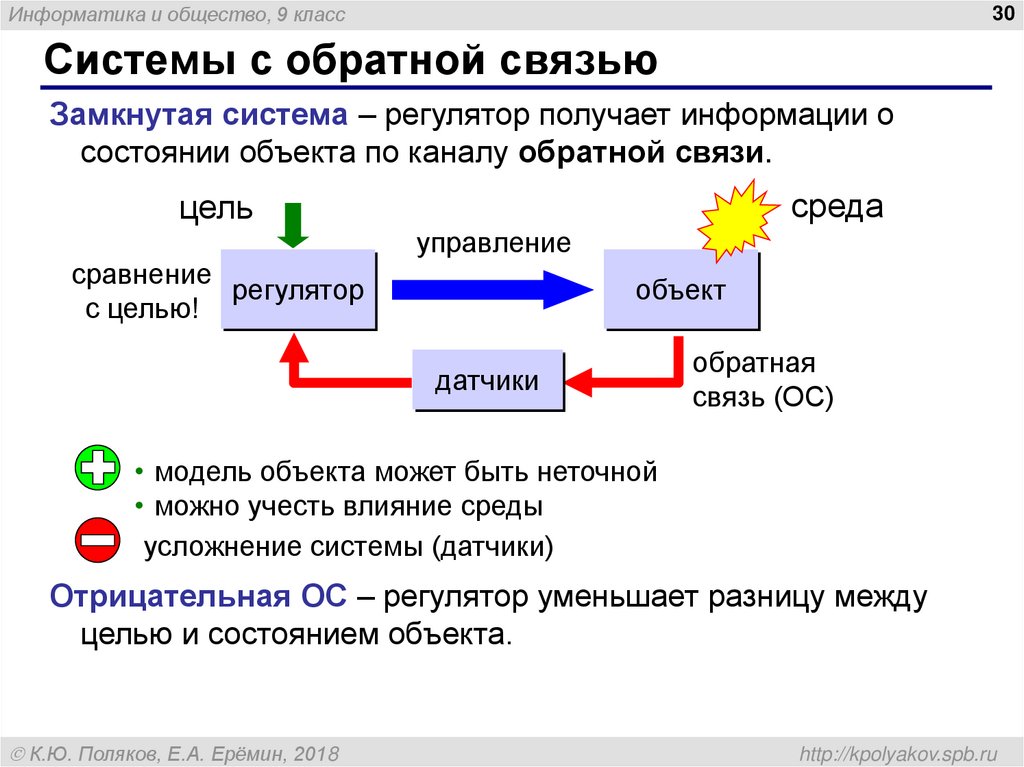 ОПЕРАТОРЫ ЛИНЕЙНЫЕ, линейные преобразования ОПЕРАЦИИ МАШИННЫЕ ОПЕРАЦИИ НАД МАССИВАМИ ОПЕРАЦИИ НАД СИМВОЛАМИ И СТРОКАМИ ОПЕРАЦИИ НАД ЧИСЛАМИ ОПЕРАЦИИ ИССЛЕДОВАНИЕ ОПЕРАЦИЙ СИСТЕМА ОПЕРАЦИОННАЯ СИСТЕМА ОПЕРАЦИЯ НАИМЕНЬШЕГО КОРНЯ ОПЕРАЦИЯ ПРИМИТИВНОЙ РЕКУРСИИ ОПИСАНИЕ ОБЪЕКТА РАСПОЗНАВАНИЯ ОПОРНОЕ НАПРЯЖЕНИЕ ОПОРНЫЙ ПЛАН ОПТИМАЛЬНАЯ ТОЧКА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ТЕОРИЯ ОПТИМАЛЬНОЕ ЗНАЧЕНИЕ ФУНКЦИИ ОПТИМАЛЬНОСТИ НЕОБХОДИМЫЕ УСЛОВИЯ ОПТИМАЛЬНОСТИ ПРИНЦИП ОПТИМАЛЬНЫЙ ВЕКТОР ОПТИМАЛЬНЫХ ПАРАМЕТРОВ СИСТЕМЫ ВЫБОР ОПТИМАЛЬНЫХ ПРОЦЕССОВ ТЕОРИЯ ОПТИМИЗАТОР АВТОМАТИЧЕСКИЙ ОПТИМИЗАЦИИ МЕТОДЫ численные «ОПТИМУМ» ОПТРОН ОРГАНИЗАЦИЯ ИНФОРМАЦИОННОГО МАССИВА ОРГАНИЗАЦИЯ УЧЕТА В АВТОМАТИЗИРОВАННЫХ СИСТЕМАХ УПРАВЛЕНИЯ ОРГАТЕХНИКА, организационная техника ОРДЕНА ЛЕНИНА ИНСТИТУТ КИБЕРНЕТИКИ АКАДЕМИИ НАУК УКРАИНСКОЙ ССР УПРАВЛЕНИЯ (АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ), ИАТ ОСТАНОВ ОСУЩЕСТВИМОСТИ ФИЗИЧЕСКОЙ КРИТЕРИИ ОСУЩЕСТВИМОСТИ ЦЕЛИ ПРИНЦИП ОТВЕТ РАСПОЗНАЮЩЕЙ СИСТЕМЫ ОТКАЗ ОТ РАСПОЗНАВАНИЯ ОТЛАДОЧНЫЕ ПРОГРАММЫ ОТНОШЕНИЕ ОТНОШЕНИЕ АНАЛИТИЧЕСКОЕ ОТНОШЕНИЕ БАЗИСНОЕ ОТНОШЕНИЕ ПАРАДИГМАТИЧЕСКОЕ ОТНОШЕНИЕ ПРАВДОПОДОБИЯ ОТНОШЕНИЕ СИГНАЛ/ПОМЕХА ОТНОШЕНИЕ СИНТАГМАТИЧЕСКОЕ ОТНОШЕНИЕ СИНТЕТИЧЕСКОЕ ОТНОШЕНИЕ ТЕКСТУАЛЬНОЕ ОТРИЦАНИЕ в алгебре логики ОЧЕРЕДЕЙ ТЕОРИЯ ОШИБКА В ПРИНЯТИИ ГИПОТЕЗ ОШИБКИ В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОШИБОК ТЕОРИЯ ПАКЕТНАЯ ОБРАБОТКА ИНФОРМАЦИИ ПАЛЬМА ПОТОК ПАМЯТИ ЗАЩИТА ПАМЯТИ РАСПРЕДЕЛЕНИЕ ПАМЯТЬ МАГАЗИННАЯ ПАМЯТЬ СТРАНИЧНАЯ ПАМЯТЬ ЦВМ ПАРАБОЛИЧЕСКОГО ТИПА ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИИ В ЧАСТНЫХ ПРОИЗВОДНЫХ СПОСОБЫ РЕШЕНИЯ.  ПАРАЛЛЕЛЬНЫЙ АЛГОРИТМ ПАРАМЕТР ФАКТИЧЕСКИЙ ПАРАМЕТР ФОРМАЛЬНЫЙ ПАРАМЕТРОН ПАРЕТО ОПТИМУМ ПАЧКА ОШИБОК, пакет ошибок ПЕРЕВОД АВТОМАТИЧЕСКИЙ ПЕРЕДАТОЧНАЯ ФУНКЦИЯ ПЕРЕДАЧИ ИНФОРМАЦИИ СКОРОСТЬ ПЕРЕКЛЮЧАТЕЛЬНЫЕ ФУНКЦИИ ПЕРЕМЕННЫХ НАПРАВЛЕНИЙ МЕТОД ПЕРЕРАБОТКА ИНФОРМАЦИИ В ЦВМ ПЕРЕХОДНЫЙ ПРОЦЕСС ПЕРИОД ЗАНЯТОСТИ в системах массового обслуживания ПЕРИФЕРИЙНОЕ ОБОРУДОВАНИЕ ПЕРСЕПТРОН «ПЕРТ» ПЕРФОРАТОР ПЕРФОРАЦИОННАЯ КАРТА, перфокарта ПЕРФОРАЦИОННАЯ ЛЕНТА, перфолента ПЕЧАТНАЯ СХЕМА ПИРСА СТРЕЛКА, функция Вебба, отрицание дизъюнкции ПЛ-1 ПЛАВАЮЩАЯ ЗАПЯТАЯ ПЛАН-ГРАФИК ПЛАТЕЖНАЯ МАТРИЦА ПЛАТЕЖНАЯ ФУНКЦИЯ ПЛЕНКА МАГНИТНАЯ ПНЕВМОНИКА, струйная пневмоавтоматика ПОВЕДЕНИЕ АВТОМАТОВ. ПОВЕДЕНИЕ АВТОМАТОВ В СЛУЧАЙНЫХ СРЕДАХ. ПОГЛОЩЕНИЯ ЗАКОН ПОГРЕШНОСТЕЙ ВЫЧИСЛЕНИЙ ТЕОРИЯ ПОГРЕШНОСТЬ ПОГРЕШНОСТЬ РЕШАЮЩЕГО ЭЛЕМЕНТА ПОДАВТОМАТ ПОДОБИЯ ТЕОРИЯ ПОДПРОГРАММА ПОДПРОГРАММА ЗАМКНУТАЯ ПОДПРОГРАММА ОТКРЫТАЯ ПОДПРОГРАММА СТАНДАРТНАЯ ПОДСИСТЕМА ПОИСК ИНФОРМАЦИИ АВТОМАТИЧЕСКИЙ ПОИСКА ЭКСТРЕМУМА ФУНКЦИЙ МЕТОДЫ ПОИСКОВОЕ ПРЕДПИСАНИЕ ПОИСКОВЫЙ МАССИВ ПОИСКОВЫЙ ОБРАЗ ДОКУМЕНТА ПОИСКОВЫЙ ОБРАЗ ЗАПРОСА ПОКАЗАТЕЛЬНОЕ РАСПРЕДЕЛЕНИЕ, экспоненциальное распределение ПОЛНОЙ ВЕРОЯТНОСТИ ФОРМУЛА ПОЛНОТА ФОРМАЛЬНОЙ ТЕОРИИ ПОЛНОТЫ ПРОБЛЕМА в теории автоматов ПОЛОС МЕТОД ПОЛУГРУППА, ассоциативная система ПОЛУМАРКОВСКИЙ СЛУЧАЙНЫЙ ПРОЦЕСС ПОЛУСУММАТОР ПОЛЬСКАЯ ЗАПИСЬ ПОМЕХИ ПОМЕХОУСТОЙЧИВОСТЬ СИСТЕМ УПРАВЛЕНИЯ ПОНТРЯГИНА ПРИНЦИП МАКСИМУМА ПОПОВА КРИТЕРИЙ ПОРОГ ЧУВСТВИТЕЛЬНОСТИ ПОРОГОВЫЙ ЭЛЕМЕНТ ПОСЛЕДОВАТЕЛЬНЫЙ АНАЛИЗ ПОСЛЕДОВАТЕЛЬНЫЙ АНАЛИЗ ВАРИАНТОВ ПОСЛЕДОВАТЕЛЬНЫХ ПРИБЛИЖЕНИИ МЕТОД ПОСТА ИСЧИСЛЕНИЯ ПОСТА КОМБИНАТОРНАЯ ПРОБЛЕМА ПОСТА МАШИНА ПОТЕНЦИАЛОВ МЕТОД ПОТЕНЦИАЛЬНАЯ ЭЛЕМЕНТНАЯ СТРУКТУРА ЦВМ ПОТЕНЦИАЛЬНО-ИМПУЛЬСНАЯ ЭЛЕМЕНТНАЯ СТРУКТУРА ЦВМ ПОТЕНЦИАЛЬНО-НУЛЕВАЯ ТОЧКА ПОТЕНЦИАЛЬНО-НУЛЕВЫХ ТОЧЕК МЕТОД ПОТЕНЦИАЛЬНЫЕ ЛОГИЧЕСКИЕ ЭЛЕМЕНТЫ ПОТЕНЦИАЛЬНЫХ ФУНКЦИЙ МЕТОД ПОТЕРИ ИНФОРМАЦИИ при поиске ПОТОК БЕЗ ПОСЛЕДЕЙСТВИЯ ПОТОК В СЕТИ ПОТОК В СЕТИ НЕОДНОРОДНЫЙ ПОТОК ВЫХОДЯЩИЙ ПОТОК ГЕОМЕТРИЧЕСКИЙ ПОТОК ИНФОРМАЦИОННЫЙ ЗАМКНУТЫЙ ПОТОК НЕСТАЦИОНАРНЫЙ ПОТОК ПРОСТЕЙШИЙ ПОТОК РЕГУЛЯРНЫЙ ПОТОК С ОГРАНИЧЕННЫМ ПОСЛЕДЕЙСТВИЕМ ПОТОК СЛУЧАЙНЫЙ ПРАГМАТИКА ПРЕДИКАТ ПРЕДИКАТИВНОСТЬ ПРЕДСКАЗАНИЯ СЛУЧАЙНЫХ ПРОЦЕССОВ ТЕОРИЯ ПРЕДСКАЗЫВАЮЩИЙ ФИЛЬТР ПРЕДСТАВЛЕНИЙ ГРУПП ТЕОРИЯ ПРЕОБРАЗОВАНИЕ ПЕРИОДИЧЕСКИ-ОПРЕДЕЛЕННОЕ ПРЕОБРАЗОВАТЕЛИ ВОЛОКОННЫЕ ПРЕОБРАЗОВАТЕЛИ ДВУХ И БОЛЕЕ ПЕРЕМЕННЫХ ПРЕОБРАЗОВАТЕЛИ КОД-АНАЛОГ ПРЕОБРАЗОВАТЕЛИ С ПОРАЗРЯДНЫМ КОДИРОВАНИЕМ ПРЕОБРАЗОВАТЕЛИ ФОРМЫ ИНФОРМАЦИИ ПРЕОБРАЗОВАТЕЛЬ ВРЕМЯ-ИМПУЛЬСНЫЙ ПРЕОБРАЗОВАТЕЛЬ ИНТЕГРИРУЮЩЕГО ТИПА ПРЕОБРАЗОВАТЕЛЬ КОМБИНИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫЙ КВАЗИОБРАТИМЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫЙ ОБРАТИМЫЙ ПРЕОБРАЗОВАТЕЛЬ НАКАПЛИВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ПОСЛЕДОВАТЕЛЬНОГО СЧЕТА ПРЕОБРАЗОВАТЕЛЬ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ С НЕПОСРЕДСТВЕННЫМ ОТСЧЕТОМ ПРЕОБРАЗОВАТЕЛЬ СЛЕДЯЩИЙ ПРЕОБРАЗОВАТЕЛЬ ФАЗО-ИМПУЛЬСНЫЙ ПРЕОБРАЗОВАТЕЛЬ ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ЦИКЛИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТНО-ИМПУЛЬСНЫЙ ПРЕСЛЕДОВАНИЯ ЗАДАЧА ПРИБЛИЖЕННЫХ МЕТОДОВ ОБЩАЯ ТЕОРИЯ ПРИНЯТИЕ РЕШЕНИЙ В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ ПРИОРИТЕТ ПРИОРИТЕТОВ СИСТЕМА ПРОБЛЕМА «ЧЕЛОВЕК-МАШИНА» ПРОГОНКИ МЕТОД ПРОГРАММ СЕГМЕНТАЦИЯ ПРОГРАММА вычислительной машины ПРОГРАММА ДИАГНОСТИЧЕСКАЯ ПРОГРАММА ИСПЫТАТЕЛЬНАЯ ПРОГРАММА КОМПИЛИРУЮЩАЯ ПРОГРАММА УПРАВЛЯЮЩАЯ ПРОГРАММА-ДИСПЕТЧЕР ПРОГРАММИРОВАНИЕ АВМ ПРОГРАММИРОВАНИЕ ВЫПУКЛОЕ ПРОГРАММИРОВАНИЕ ДИНАМИЧЕСКОЕ ПРОГРАММИРОВАНИЕ ДИСКРЕТНОЕ ПРОГРАММИРОВАНИЕ ДЛЯ ЦВМ ПРОГРАММИРОВАНИЕ КВАДРАТИЧНОЕ ПРОГРАММИРОВАНИЕ КУСОЧНО-ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ МАТЕМАТИЧЕСКОЕ ПРОГРАММИРОВАНИЕ НЕЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ СТОХАСТИЧЕСКОЕ ПРОГРАММИРОВАНИЕ ЦЕЛОЧИСЛЕННОЕ ПРОГРАММИРОВАНИЕ ЧАСТИЧНО ЦЕЛОЧИСЛЕННОЕ ПРОГРАММИРОВАНИЕ ЭВРИСТИЧЕСКОЕ ПРОГРАММИРОВАННОЕ ОБУЧЕНИЕ ПРОГРАММИРОВАННЫЙ УЧЕБНИК ПРОГРАММИРУЮЩАЯ ПРОГРАММА ПРОГРАММНОЕ ПЛАНИРОВАНИЕ И УПРАВЛЕНИЕ в народном хозяйстве.  ПРОГРАММЫ ОБСЛУЖИВАЮЩИЕ ПРОЕКТИРОВАНИЕ СЕТЕЙ И КОММУНИКАЦИЙ ОПТИМАЛЬНОЕ ПРОЕКЦИОННЫЕ МЕТОДЫ ПРОИЗВОДСТВЕННАЯ ФУНКЦИЯ «ПРОМIНЬ» ПРОПОЗИЦИОНАЛЬНЫЕ СВЯЗКИ, связки логические ПРОПУСКНАЯ СПОСОБНОСТЬ КАНАЛА ПРОСТОЙ ИТЕРАЦИИ МЕТОД ПРОСТРАНСТВО АБСТРАКТНОЕ в функциональном анализе ПРОСТРАНСТВО ИЗОБРАЖЕНИЙ ПРОЦЕДУРА в программировании ПРОЦЕДУРА РЕКУРСИВНАЯ ПРОЦЕСС КОНЕЧНОЙ ДЛИТЕЛЬНОСТИ ПРОЦЕСС УПРАВЛЯЕМЫЙ ПРОЦЕССОР ПРОЦЕССЫ С НЕЗАВИСИМЫМИ ПРИРАЩЕНИЯМИ ПРЯМЫЕ МЕТОДЫ решения задач прикладной математики ПСЕВДОСЛУЧАЙНЫЕ ЧИСЛА ПСИХОЛОГИЯ ИНЖЕНЕРНАЯ ПУАССОНА ПОТОК ПУАССОНА РАСПРЕДЕЛЕНИЕ ПУТЬ в теории графов РАВНОВЕСИЯ СИТУАЦИЯ «РАЗДАН» РАЗДЕЛЯЮЩАЯ ПОВЕРХНОСТЬ в распознавании образов РАЗМЕЩЕНИЯ ПРОИЗВОДСТВ МОДЕЛИ РАЗНОСТНАЯ СХЕМА РАЗРЯДНОСТЬ ВЫЧИСЛИТЕЛЬНОЙ МАШИНЫ РАСПАРАЛЛЕЛИВАНИЕ АЛГОРИТМА РАСПОЗНАВАНИЕ ЗРИТЕЛЬНЫХ ОБРАЗОВ, распознавание изображений РАСПОЗНАВАНИЕ ОБРАЗОВ РАСПОЗНАВАНИЕ ПРОЦЕССОВ РАСПОЗНАВАНИЕ РЕЧЕВЫХ СИГНАЛОВ РАСПОЗНАЮЩАЯ СИСТЕМА РАСПРЕДЕЛЕНИЕ ВЕРОЯТНОСТЕЙ РАСПРЕДЕЛИТЕЛЬНАЯ ЗАДАЧА РАСЧЕТА ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ МЕТОДЫ РАСЧЕТНЫЙ СТОЛ ПОСТОЯННОГО ТОКА, расчетная модель электрической системы РАСШИФРОВОЧНАЯ МАШИНА РАУСА КРИТЕРИЙ, Рауса — Гурвица критерий РЕАЛЬНЫЙ МАСШТАБ ВРЕМЕНИ РЕГЕНЕРАЦИЯ информации в вычислительных устройствах РЕГИСТР РЕГРЕССИЯ РЕГУЛИРОВАНИЕ ЗАПАСОВ РЕГУЛИРОВАНИЯ ЗАКОН РЕГУЛИРУЮЩИЕ СИСТЕМЫ ОРГАНИЗМА РЕГУЛЯРИЗАЦИИ МЕТОД РЕГУЛЯРНЫЕ СОБЫТИЯ И ВЫРАЖЕНИЯ РЕГУЛЯТОР ИМПУЛЬСНЫЙ РЕГУЛЯТОР ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОРЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ РЕГУЛЯТОРЫ ЦИФРОВЫЕ РЕДАКТИРОВАНИЕ ДАННЫХ РЕЖИМ ПЕРИОДИЗАЦИИ РЕЖИМ РАЗДЕЛЕНИЯ ВРЕМЕНИ РЕКУРСИВНЫЕ ФУНКЦИИ РЕЛЕВАНТНОСТЬ ДОКУМЕНТА РЕЛЕЙНАЯ КОРРЕЛЯЦИОННАЯ ФУНКЦИЯ РЕЛЕЙНО-КОНТАКТНЫХ СХЕМ ТЕОРИЯ РЕФАЛ РЕФЕРАТ РЕФЕРИРОВАНИЕ АВТОМАТИЧЕСКОЕ РЕФЛЕКСИВНОЕ УПРАВЛЕНИЕ РЕШАЮЩЕЕ ПРАВИЛО в распознавании образов РЕШАЮЩЕЕ УСТРОЙСТВО.  РИСК РАСПОЗНАВАНИЯ РИСКА ПРОБЛЕМА РОБОТ РОБОТ ПРОМЫШЛЕННЫЙ РУНГЕ—КУТТЫ МЕТОД «РУТА-110» R-ФУНКЦИИ САМОДВОЙСТВЕННЫЕ ФУНКЦИИ АЛГЕБРЫ ЛОГИКИ САМОКОРРЕКТИРУЮЩАЯСЯ СХЕМА САМОНАСТРАИВАЮЩАЯСЯ ПАРАМЕТРИЧЕСКАЯ СИСТЕМА САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА САМООБУЧАЮЩИЕСЯ СИСТЕМЫ САМООБУЧЕНИЕ РАСПОЗНАВАНИЮ ОБРАЗОВ СБОЙ ЦВМ СВЕРТКА РАСПРЕДЕЛЕНИЙ СЛУЧАЙНЫХ ВЕЛИЧИН СВЕТОВОЙ КАРАНДАШ, световое перо СВОДИМОСТЬ в теории алгоритмов СВОЙСТВО ОТСУТСТВИЯ ПОСЛЕДЕЙСТВИЯ СВЯЗКИ ЛОГИЧЕСКИЕ СДВИГ «CDC-7600» СЕДЛОВЫЕ ТОЧКИ СЕКВЕНЦИЯ СЕМАНТИКА СЕМАНТИКА СТРУКТУРНАЯ СЕМАНТИЧЕСКИЙ АНАЛИЗ СЕМИОТИКА СЕРВОМОТОР СЕТЕВАЯ ЗАДАЧА СЕТЕВАЯ ЗАДАЧА НЕОДНОРОДНАЯ СЕТЕВАЯ МОДЕЛЬ СЕТЕВОЙ ГРАФИК СЕТЕВЫЕ МЕТОДЫ ПЛАНИРОВАНИЯ И УПРАВЛЕНИЯ «СЕТУНЬ» СЕТЧАТКА в распознавании образов СЕТЬ ИЗ НЕЙРОННЫХ ЭЛЕМЕНТОВ СЕТЬ ЛОГИЧЕСКАЯ СЕЧЕНИЙ ПРОСТРАНСТВА ПАРАМЕТРОВ МЕТОД СИГНАЛИЗИРУЮЩАЯ ФУНКЦИЯ СИЛЛОГИСТИКА «СИМЕНС» (Siemens Aktiengesellschaft) СИММЕТРИЧЕСКИЕ ФУНКЦИИ АЛГЕБРЫ ЛОГИКИ СИМПЛЕКС-МЕТОД СИМПСОНА ФОРМУЛА СИМСКРИПТ СИМУЛА «СИНТАКСИС» СИНТАКСИЧЕСКИЙ АНАЛИЗ АВТОМАТИЧЕСКИЙ естественных языков СИНТАКСИЧЕСКИЙ АНАЛИЗ ПРОГРАММ СИНТАКСИЧЕСКИЙ КОНТРОЛЬ ПРОГРАММ СИНТАКТИКА СИНТЕЗ АВТОМАТОВ АБСТРАКТНЫЙ СИНТЕЗ АВТОМАТОВ СТРУКТУРНЫЙ СИНТЕЗ АЛГОРИТМА УПРАВЛЕНИЯ СИНТЕЗ РЕЧЕВЫХ СИГНАЛОВ СИНХРОНИЗАЦИЯ РАБОТЫ ЦВМ «СИРИУС» СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АНАЛИЗ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СИНТЕЗ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТАТИСТИЧЕСКАЯ ДИНАМИКА СИСТЕМ ОБЩАЯ ТЕОРИЯ СИСТЕМА АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВТОМАТИЧЕСКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (САУ) СИСТЕМА АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ СИСТЕМА АВТОНОМНАЯ СИСТЕМА АСТАТИЧЕСКАЯ СИСТЕМА ИНФОРМАЦИОННОГО ПОИСКА СИСТЕМА НЕАВТОНОМНАЯ СИСТЕМА НЕПРЯМОГО УПРАВЛЕНИЯ СИСТЕМА ПРЕРЫВАНИЯ ЦВМ СИСТЕМА ПРОГРАММИРОВАНИЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СИСТЕМА ПРЯМОГО УПРАВЛЕНИЯ СИСТЕМА СЧИСЛЕНИЯ СИСТЕМА УПРАВЛЕНИЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАМКНУТАЯ, система управления по отклонению СИСТЕМА УПРАВЛЕНИЯ НАУЧНЫМ ЭКСПЕРИМЕНТОМ СИСТЕМА УПРАВЛЕНИЯ РАЗОМКНУТАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ СИСТЕМА УПРАВЛЕНИЯ С РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ СИСТЕМА УРАВНЕНИЙ В ВАРИАЦИЯХ СИСТЕМА УРАВНЕНИЙ СОПРЯЖЕННАЯ СИСТЕМА «ЧЕЛОВЕК — МАШИНА» СИСТЕМА ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ СИСТЕМНОЕ ПРОЕКТИРОВАНИЕ ЦВМ СИСТЕМНЫЙ ПОДХОД СИСТЕМОТЕХНИКА СИСТЕМЫ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ СИСТЕМЫ С ВРЕМЕННЫМИ ОГРАНИЧЕНИЯМИ СИСТЕМЫ С ОГРАНИЧЕННЫМ ВРЕМЕНЕМ ОЖИДАНИЯ СИСТЕМЫ С ОГРАНИЧЕННЫМ ВРЕМЕНЕМ ПРЕБЫВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ НА ПЕРЕМЕННОМ ТОКЕ СКЛЕИВАНИЯ ЗАКОН СКОЛЬЗЯЩИЙ РЕЖИМ СКОРОСТЬ СОЗДАНИЯ СООБЩЕНИЯ СЛЕДЯЩАЯ СИСТЕМА СЛОВАРНЫЙ ПОИСК СЛОВАРЬ АВТОМАТИЧЕСКИЙ СЛОВАРЬ ИНФОРМАЦИОННОГО ЯЗЫКА СЛОВАРЬ ЧАСТОТНЫЙ СЛОВО СЛОЖНОСТЬ ВЫЧИСЛЕНИЙ СЛОЖНОСТЬ ТЬЮРИНГОВЫХ ВЫЧИСЛЕНИЙ СЛОЖНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ СЛУЧАЙНАЯ ВЕЛИЧИНА СЛУЧАЙНАЯ ФУНКЦИЯ СЛУЧАЙНОГО ПОИСКА МЕТОДЫ СЛУЧАЙНОЕ ПОЛЕ СЛУЧАЙНОЕ СОБЫТИЕ СЛУЧАЙНЫЕ ЧИСЛА СЛУЧАЙНЫЙ ПРОЦЕСС, вероятностный процесс, стохастический процесс СЛУЧАЙНЫХ ПРОЦЕССОВ ТЕОРИЯ СЛУЧАЙНЫХ ПРОЦЕССОВ ТЕОРИЯ ПРЕДСКАЗАНИЯ СОБСТВЕННЫХ ЗНАЧЕНИЙ ДИФФЕРЕНЦИАЛЬНЫХ ОБЫКНОВЕННЫХ УРАВНЕНИЙ СПОСОБЫ ВЫЧИСЛЕНИЙ.  СОБСТВЕННЫХ ЗНАЧЕНИЙ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ В ЧАСТНЫХ ПРОИЗВОДНЫХ СПОСОБЫ ВЫЧИСЛЕНИЙ. СОБСТВЕННЫХ ЗНАЧЕНИЙ И СОБСТВЕННЫХ ВЕКТОРОВ МАТРИЦ СПОСОБЫ ВЫЧИСЛЕНИЯ. СОБЫТИЕ РЕГУЛЯРНОЕ СОБЫТИЯ ЦИКЛИЧЕСКАЯ ГЛУБИНА СОВМЕЩЕНИЕ ОПЕРАЦИЙ В МАШИНЕ «СОЛЯРТРОН ЭЛЕКТРОНИК ГРУП» (The Solartron Electronic Group, Ltd) СООБЩЕНИЕ в теории передачи информации СООБЩЕНИЙ ТЕОРИЯ СОПРОТИВЛЕНИЕ ОТРИЦАТЕЛЬНОЕ СОПРОТИВЛЕНИЕ ЦИФРОВОЕ УПРАВЛЯЕМОЕ СОПРЯЖЕННЫХ НАПРАВЛЕНИЙ МЕТОД СОРТИРОВАЛЬНАЯ МАШИНА СОРТИРОВКА ДАННЫХ СОЦИОЛОГИЧЕСКИЕ ВОПРОСЫ КИБЕРНЕТИКИ СПЕКТРАЛЬНАЯ ПЛОТНОСТЬ СПЕКТРАЛЬНАЯ ТЕОРИЯ СЛУЧАЙНЫХ ПРОЦЕССОВ СПЕКТРАЛЬНАЯ ФУНКЦИЯ стационарного в широком смысле случайного процесса СПЕЦИАЛИЗИРОВАННАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА СПЕЦИАЛЬНЫХ ФУНКЦИЙ СПОСОБЫ ВЫЧИСЛЕНИЯ. СПЕЦИФИКАЦИЯ СПИСКОВАЯ СТРУКТУРА СПИСОК в программировании СПРАВОЧНО-ИНФОРМАЦИОННЫЙ ФОНД (СИФ) СТАБИЛИЗАЦИИ СИСТЕМА СТАНДАРТИЗИРОВАННАЯ ИСТОРИЯ БОЛЕЗНИ СТАНДАРТЫ ПО ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКЕ СТАТИСТИЧЕСКАЯ ПРОВЕРКА ГИПОТЕЗ СТАТИСТИЧЕСКИЕ МЕТОДЫ РАСПОЗНАВАНИЯ СТАТИСТИЧЕСКИЕ ОЦЕНКИ СТАТИСТИЧЕСКИХ ИСПЫТАНИЙ МЕТОД СТАТИСТИЧЕСКОЙ ЛИНЕАРИЗАЦИИ МЕТОД СТАЦИОНАРНЫЙ СЛУЧАЙНЫЙ ПРОЦЕСС СТИЛТЬЕСА КОРРЕЛЯЦИОННЫЕ ФУНКЦИИ СТОХАСТИЧЕСКИЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ СТОХАСТИЧЕСКИЙ ПРОЦЕСС СТОХАСТИЧЕСКИХ КВАЗИГРАДИЕНТОВ МЕТОД СТОХАСТИЧЕСКОЙ АППРОКСИМАЦИИ МЕТОД СТОХАСТИЧЕСКОЙ ОПТИМИЗАЦИИ МЕТОДЫ СТРАТЕГИЯ ОПТИМАЛЬНАЯ СТРАТЕГИЯ ПОВЕДЕНИЯ СТРАТЕГИЯ СМЕШАННАЯ СТРАТЕГИЯ ЧИСТАЯ «СТРЕЛА» СТРУКТУРА, решетка.  СТРУКТУРНАЯ ИНТЕРПРЕТАЦИЯ ЯЗЫКА СТРУКТУРНАЯ ПОЭТИКА СТРУКТУРНАЯ СХЕМА МОДЕЛИ СТРУКТУРНАЯ ТЕОРИЯ АВТОМАТОВ СТРУКТУРНОЕ СТИХОВЕДЕНИЕ СУММАТОР СУММАТОР КОМБИНАЦИОННЫЙ СУММАТОР НАКАПЛИВАЮЩИЙ СУММАТОР ОДНОРАЗРЯДНЫЙ СУММАТОР ПАРАЛЛЕЛЬНЫЙ СУММАТОР ПОСЛЕДОВАТЕЛЬНЫЙ СУПЕРВИЗОР СХЕМА ВЕНТИЛЬНАЯ СХЕМА КОНТАКТНАЯ СХЕМА КОНТАКТНАЯ БЕСПОВТОРНАЯ СХЕМА КОНТАКТНО-ВЕНТИЛЬНАЯ СХЕМА РЕЛЕЙНО-КОНТАКТНАЯ СХЕМА СРАВНЕНИЯ СХОДСТВА КРИТЕРИИ СЧЕТЧИК ТАБУЛИРОВАНИЕ ФУНКЦИЙ ТАБУЛЯТОР ТАЙПОТРОН ТАКТ ТАКТОВАЯ ЧАСТОТА ТВИСТОР ТЕЗАУРУС ТЕЛЕМЕХАНИКА ТЕЛЕТАЙП ТЕРМИНАЛ, абонентский пульт, оконечное устройство ТЕРМИНАЛЬНОЕ УПРАВЛЕНИЕ, управление конечным состоянием ТЕСТОВЫЕ ПРОГРАММЫ, тест-программы ТЕСТЫ ТЕХНИЧЕСКАЯ ДИАГНОСТИКА ТЕХНИЧЕСКОЕ ПРОЕКТИРОВАНИЕ ЦВМ ТЕХПРОМФИНПЛАН ПРЕДПРИЯТИЯ МАТРИЧНЫЙ ТОЖДЕСТВЕННО ИСТИННАЯ ФОРМУЛА, общезначимая формула ТОНКАЯ МАГНИТНАЯ ПЛЕНКА ТОПОЛОГИЯ «ТОСИБА» (Tokyo Shibaura Electric Company, Ltd) ТОЧКА РАВНОВЕСИЯ ТОЧКИ ПЕРЕКЛЮЧЕНИЯ ТОЧНОСТЬ ВОСПРОИЗВЕДЕНИЯ СООБЩЕНИЯ ТРАЕКТОРИЯ ДОПУСТИМАЯ ТРАЕКТОРИЯ ОПТИМАЛЬНАЯ ТРАЕКТОРИЯ ФАЗОВАЯ ТРАНЗИТИВНЫЙ ГРАФ ТРАНСЛЯТОР, компилирующая программа, программирующая программа ТРАНСЛЯТОР СИНТАКСИЧЕСКИ УПРАВЛЯЕМЫЙ ТРАНСПОРТНАЯ ЗАДАЧА ТРАНСПОРТНАЯ СЕТЬ ТРАНСФЛЮКСОР ТРАНСЦЕНДЕНТНЫЕ УРАВНЕНИЯ ТРИГГЕР ТРИГГЕР ДИНАМИЧЕСКИЙ ТРИГГЕР СТАТИЧЕСКИЙ ТРИОД ПОЛУПРОВОДНИКОВЫЙ, транзистор ТЬЮРИНГА МАШИНА УЗЛОВОЙ СПИСОК «УМ1-НХ» УНИВЕРСАЛЬНАЯ СИСТЕМА ЭЛЕМЕНТОВ ПРОМЫШЛЕННОЙ ПНЕВМОАВТОМАТИКИ (УСЭППА) UNCOL УПОРЯДОЧЕНИЕ МАССИВА УПРАВЛЕНИЕ В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ УПРАВЛЕНИЕ ДАННЫМИ УПРАВЛЕНИЕ ЗАПАСАМИ УПРАВЛЕНИЕ КОМАНДАМИ УПРАВЛЕНИЕ ЛЕЧЕБНЫМ ПРОЦЕССОМ.  УПРАВЛЕНИЕ ОПЕРАЦИЯМИ УПРАВЛЕНИЕ ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ ПРОГРАММНОЕ УПРАВЛЕНИЕ С АДАПТАЦИЕЙ УПРАВЛЕНИЕ СТРУКТУРНОЕ В ЦВМ УПРАВЛЕНИЯ ОТНОШЕНИЕ, зависимости отношение УПРАВЛЕНИЯ СЛУЧАЙНЫМИ ПРОЦЕССАМИ ТЕОРИЯ УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА УПРАВЛЯЮЩАЯ ПРОГРАММА УПРАВЛЯЮЩЕЕ ВОЗДЕЙСТВИЕ, регулирующее воздействие «УПРАВЛЯЮЩИЕ СИСТЕМЫ И МАШИНЫ» УРАВНЕНИЙ КЛАССИФИКАЦИЯ. УРАВНОВЕШИВАНИЯ МЕТОДЫ «УРАЛ» УСИЛИТЕЛЬ УСИЛИТЕЛЬ ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ ОПЕРАЦИОННЫЙ, усилитель решающий УСИЛИТЕЛЬ ОТРАБАТЫВАЮЩИЙ УСИЛИТЕЛЬ РЕШАЮЩИЙ УСЛОВИЯ СТАЦИОНАРНОСТИ УСЛОВИЯ ТРАНСВЕРСАЛЬНОСТИ УСТАНОВКА НАЧАЛЬНЫХ УСЛОВИЙ УСТОЙЧИВОСТИ ДИСКРЕТНЫХ СИСТЕМ ТЕОРИЯ УСТОЙЧИВОСТИ КРИТЕРИИ УСТОЙЧИВОСТИ НЕПРЕРЫВНЫХ СИСТЕМ ТЕОРИЯ УСТОЙЧИВОСТИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕОРИЯ УСТОЙЧИВОСТЬ ВЫЧИСЛИТЕЛЬНЫХ АЛГОРИТМОВ УСТОЙЧИВОСТЬ МОДЕЛИ УСТОЙЧИВОСТЬ ПО ЛЯПУНОВУ УСТОЙЧИВОСТЬ РАЗНОСТНЫХ СХЕМ УСТОЙЧИВОСТЬ ЧИСЛЕННОГО МЕТОДА УСТРОЙСТВА ВВОДА—ВЫВОДА ДАННЫХ ЦВМ УСТРОЙСТВА ЗАПИСИ АНАЛОГОВОЙ ИНФОРМАЦИИ УСТРОЙСТВА ОТОБРАЖЕНИЯ ИНФОРМАЦИИ УСТРОЙСТВО ИНДИКАЦИИ ABM УСТРОЙСТВО ИНТЕГРИРУЮЩЕЕ, интегратор УСТРОЙСТВО ИНТЕГРО-ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО ОБМЕНА ЦВМ УСТОЙСТВО ПЕРЕЗАПИСИ ДЛЯ ЦВМ УСТРОЙСТВО УПРАВЛЕНИЯ ЦВМ УСТРОЙСТВО ЦИФРОВОЙ РЕГИСТРАЦИИ ФАЗОВОГО ПРОСТРАНСТВА МЕТОД ФАЗОВЫЕ КООРДИНАТЫ ФАЗОВЫЕ ОГРАНИЧЕНИЯ ФАКТОГРАФИЧЕСКАЯ ИНФОРМАЦИОННО-ПОИСКОВАЯ СИСТЕМА ФАКТОРИЗАЦИИ МЕТОД «ФЕРРАНТИ» (Ferranti, Ltd) ФЕРРИТ-ДИОДНАЯ СИСТЕМА ЭЛЕМЕНТОВ ФЕРРИТ-ТРАНЗИСТОРНАЯ СИСТЕМА ЭЛЕ МЕНТОВ ФИКСАТОР, адрес второго ранга, косвенный адрес ФИКСИРОВАННАЯ ЗАПЯТАЯ ФИЛОСОФСКИЕ ВОПРОСЫ КИБЕРНЕТИКИ ФИЛЬТР ФИЛЬТРАЦИЯ СЛУЧАЙНОГО ПРОЦЕССА ФОНД АЛГОРИТМОВ И ПРОГРАММ ФОНД СПРАВОЧНО-ИНФОРМАЦИОННЫЙ FORMAC ФОРМАЛИЗМ в математике ФОРТРАН «ФУДЗИЦУ» («Фудзи цусинки Сэйдзо», Fujitsu, Ltd) ФУНКЦИИ, СОХРАНЯЮЩИЕ КОНСТАНТУ ФУНКЦИИ, СОХРАНЯЮЩИЕ МНОЖЕСТВО ФУНКЦИИ, СОХРАНЯЮЩИЕ РАЗБИЕНИЕ ФУНКЦИОНАЛ ФУНКЦИОНАЛЬНАЯ СТРУКТУРА ЭВМ ФУНКЦИОНАЛЬНЫЙ ЭЛЕМЕНТ ЭВМ ФУНКЦИЯ РАССТАНОВКИ ФУНКЦИЯ РЕШЕТЧАТАЯ ФУНКЦИЯ СТУПЕНЧАТАЯ ФУРЬЕ ИНТЕГРАЛОВ СПОСОБЫ ВЫЧИСЛЕНИЯ.  ФУРЬЕ ПРЕОБРАЗОВАНИЯ ХАРАКТЕРИСТИЧЕСКАЯ ФУНКЦИЯ в теории игр ХАРАКТРОН ХЕМИТРОН ХИНЧИНА-ПОЛАЧЕКА ФОРМУЛА «ХИТАЧИ» (Hitachi, Ltd) ХОМСКОГО ГРАММАТИКИ «ХОНИУЭЛЛ КОРПОРЕЙШЕН» (Honeywell Corporation) ХЭММИНГА КОД ЦВМ АСИНХРОННАЯ ЦВМ СИНХРОННАЯ ЦЕЛЕВАЯ ФУНКЦИЯ, функция цели ЦЕЛЕСООБРАЗНОСТЬ в кибернетике ЦЕНТРАЛЬНАЯ ПРЕДЕЛЬНАЯ ТЕОРЕМА ЦЕНТРАЛЬНЫЙ ЭКОНОМИКО-МАТЕМАТИЧЕСКИЙ ИНСТИТУТ АКАДЕМИИ НАУК СССР ЦЕПИ СВЯЗАННЫЕ ЦЕПОЧКА ЦЕПЬ графа ЦЕПЬ ОКРУГЛЕНИЯ ЦЕПЬ ПЕРЕНОСА ЦИКЛ графа ЦИКЛ ПРОГРАММЫ ЦИКЛОМАТИЧЕСКОЕ ЧИСЛО ЦИПФА ЗАКОН ЦИФРО-АНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ, преобразователи код ЦИФРО-АНАЛОГОВЫЙ КОМПЛЕКС, аналого-цифровой комплекс ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА (ЦВМ) ЦИФРОВАЯ ИНТЕГРИРУЮЩАЯ МАШИНА ЦИФРОВАЯ МОДЕЛЬ СЕТЕВОГО ГРАФИКА ЦИФРОВОЙ ДИФФЕРЕНЦИАЛЬНЫЙ АНАЛИЗАТОР ЧАСТИЧНО УПОРЯДОЧЕННОЕ МНОЖЕСТВО ЧАСТПЧНО-РЕКУРСИВНЫЕ ФУНКЦИИ ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЧЕБЫШЕВА ЗАДАЧА РАВНОМЕРНОГО ПРИБЛИЖЕНИЯ ЧЕЛОВЕК-ОПЕРАТОР ЧЕРЕДУЮЩАЯСЯ ЦЕПЬ ЧЕРНИЛА МАГНИТНЫЕ «ЧЕРНЫЙ ЯЩИК» ЧИРЧА ТЕЗИС ЧИСЛА ФОРМАТ ЧИСЛЕННЫЕ МЕТОДЫ ЧИСЛЕННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ ЧИСЛОВЫЕ ХАРАКТЕРИСТИКИ СЛУЧАЙНЫХ ВЕЛИЧИН ЧИТАЮЩИЙ АВТОМАТ, оптическое читающее устройство ЧИТАЮЩИЙ АВТОМАТ КОРРЕЛЯЦИОННЫЙ ЧУВСТВИТЕЛЬНОСТИ ТЕОРИЯ ШАГ КВАНТОВАНИЯ ШЕННОНА ЛАБИРИНТ ШЕННОНА МЫШЬ ШЕННОНА ФУНКЦИЯ ШЕПЛИ ВЕКТОР ШЕФФЕРА ШТРИХ, Шеффера функция, отрицание конъюнкции ШИНА ШИФРАТОР ШТРАФНАЯ ФУНКЦИЯ ШТРАФНЫХ ФУНКЦИЙ МЕТОД ШТРАФОВ МЕТОД ШУМ КВАНТОВАНИЯ ШУМ ПОИСКОВЫЙ ЭВРИСТИКА ЭВРИСТИЧЕСКИЕ МЕТОДЫ В РАСПОЗНАВАНИИ ЭЙЛЕРА ЦЕПЬ ЭКВИВАЛЕНТНАЯ СХЕМА ЭКВИВАЛЕНТНОСТИ ОТНОШЕНИЕ (эквивалентность, эквиваленци я) на множестве ЭКВИВАЛЕНТНЫЕ ПРЕОБРАЗОВАНИЯ ЭКВИВАЛЕНТНЫЕ СОСТОЯНИЯ АВТОМАТА ЭКВИВАЛЕНТНЫХ ВОЗМУЩЕНИЙ МЕТОД ЭКВИФИНАЛЬНОСТЬ СИСТЕМЫ УПРАВЛЕНИЯ ЭКОНОМИКО-МАТЕМАТИЧЕСКИЕ МЕТОДЫ, в управлении народным хозяйством ЭКРАННЫЙ ПУЛЬТ ЭКСПЕРИМЕНТ БЕЗУСЛОВНЫЙ ЭКСПЕРИМЕНТ КРАТНЫЙ ЭКСПЕРИМЕНТ УСЛОВНЫЙ ЭКСПЕРИМЕНТАЛЬНЫХ ДАННЫХ СПОСОБЫ СТАТИСТИЧЕСКОЙ ОБРАБОТКИ ЭКСПЕРИМЕНТЫ С АВТОМАТАМИ ЭКСПЕРТНЫХ ОЦЕНОК МЕТОДЫ в прогнозировании ЭКСТРАПОЛИРОВАНИЕ В ОБУЧЕНИИ РАСПОЗНАВАНИЮ ОБРАЗОВ ЭКСТРАПОЛИРОВАНИЕ СЛУЧАЙНОГО ПРОЦЕССА ЭКСТРАПОЛИРОВАНИЕ ФУНКЦИЙ ЭКСТРЕМАЛЬ ЭКСТРЕМАЛЬНОЕ РЕГУЛИРОВАНИЕ ЭКСТРЕМАЛЬНЫЕ ЗАДАЧИ в теории графов ЭКСТРЕМАЛЬНЫЕ ЗАДАЧИ НА ГРАФАХ ЭКСТРЕМУМ ЭКСТРЕМУМ АБСОЛЮТНЫЙ ЭКСТРЕМУМ ГЛОБАЛЬНЫЙ ЭКСТРЕМУМ ЛОКАЛЬНЫЙ ЭКСТРЕМУМА ДРЕЙФ ЭЛЕКТРИЧЕСКИЕ МОДЕЛИРУЮЩИЕ СЕТКИ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ ТЕОРИЯ «ЭЛЕКТРОН» ЭЛЕКТРОННАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА (ЭВМ) ЭЛЕКТРОННОЕ МОДЕЛИРОВАНИЕ ЭЛЕКТРОННОЕ МОДЕЛИРОВАНИЕ ЗАДАЧ МАТЕМАТИЧЕСКОГО ПРОГРАММИРОВАНИЯ ЭЛЕМЕНТ ЗАДЕРЖКИ ЭЛЕМЕНТАРНАЯ СИСТЕМА ЭЛЕМЕНТАРНЫЕ ОПЕРАЦИИ НАД СЛОВАМИ ЭЛЕМЕНТАРНЫЕ ТЕОРИИ.  ЭЛЕМЕНТАРНЫХ ФУНКЦИЙ СПОСОБЫ ВЫЧИСЛЕНИЯ. ЭЛЕМЕНТНАЯ СТРУКТУРА ЦВМ ЭЛЕМЕНТНЫЕ СТРУКТУРЫ НА ЛОГИЧЕСКИХ ЗАДЕРЖИВАЮЩИХ ЭЛЕМЕНТАХ ЭЛЕМЕНТНЫЙ СИНТЕЗ ЦВМ ЭЛИОНИКА ЭЛЛИПТИЧЕСКОГО ТИПА ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ В ЧАСТНЫХ ПРОИЗВОДНЫХ СПОСОБЫ РЕШЕНИЯ. «ЭМИК-1» ЭМПИРИЧЕСКАЯ ФУНКЦИЯ РАСПРЕДЕЛЕНИЯ «ЭМСС» «ЭМУ» ЭНТРОПИЯ ЭНТРОПИЯ ЖИВЫХ СИСТЕМ ЭНТРОПИЯ СООБЩЕНИЯ при заданных условиях точности ЭПСИЛОН ЭПСИЛОН-ЭНТРОПИЯ ЭРГАТИЧЕСКАЯ СИСТЕМА ЭРГОДИЧЕСКАЯ ТЕОРИЯ ЭРГОДИЧЕСКОЕ СОСТОЯНИЕ ЭРЛАНГА ФОРМУЛЫ ЭТАЛОН в распознавании образов ЭТАЛОННОЕ НАПРЯЖЕНИЕ ЭФФЕКТИВНОСТЬ ИНФОРМАЦИОННОГО ПОИСКА техническая ЭШБИ ГОМЕОСТАТ «ЮНИВАК» (Univac) ЯДРО втеории игр ЯЗЫК АВТОМАТНЫЙ ЯЗЫК АЛГОРИТМИЧЕСКИЙ ЯЗЫК АНКЕТНЫЙ ЯЗЫК БЕСКОНТЕКСТНЫЙ, язык контекстно-свободный ЯЗЫК ДЕСКРИПТОРНЫЙ ЯЗЫК ИНФОРМАЦИОННО-ЛОГИЧЕСКИЙ ЯЗЫК ИНФОРМАЦИОННО-ПОИСКОВЫЙ ЯЗЫК ИНФОРМАЦИОННЫЙ ЯЗЫК ИСКУССТВЕННЫЙ ЯЗЫК КАТЕГОРИАЛЬНЫЙ ЯЗЫК ЛОГИЧЕСКИЙ для задания автоматов ЯЗЫК МАШИННО-ОРИЕНТИРОВАННЫЙ ЯЗЫК МАШИНЫ «МИР» ЯЗЫК ОПЕРАТОРНЫЙ ЯЗЫК ОПИСАНИЯ УСТРОЙСТВ ЦВМ ЯЗЫК ПРОМЕЖУТОЧНЫЙ ЯЗЫК ПРОЦЕДУРНО-ОРИЕНТИРОВАННЫЙ ЯЗЫК ТРАНСЛЯТОРА ВХОДНОЙ ЯЗЫК ЦВМ ВНУТРЕННИЙ ЯЗЫКА ИЗБЫТОЧНОСТЬ ЯЗЫКА ИНФОРМАЦИОННЫЕ ИЗМЕРЕНИЯ ЯЗЫКА МОДЕЛИ АНАЛИТИЧЕСКИЕ ЯЗЫКА МОДЕЛИ МАТЕМАТИЧЕСКИЕ ЯЗЫКА ЭНТРОПИЯ ЯЗЫКИ ЛОГИКО-МАТЕМАТИЧЕСКИЕ ЯЗЫКИ МАШИННЫЕ ЯЗЫКИ ПРОГРАММИРОВАНИЯ ЯЗЫКИ СПИСКОВЫЕ ЯЗЫКИ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ ЯЗЫКИ ФОРМАЛЬНЫЕ ЯЗЫК – ПОСРЕДНИК ЯЧЕЙКА ЗАПОМИНАЮЩЕГО УСТРОЙСТВА |
 М., Амосов Н.М., Артеменко И.А. Энциклопедия кибернетики. Том 2. Киев, 1974 г.
М., Амосов Н.М., Артеменко И.А. Энциклопедия кибернетики. Том 2. Киев, 1974 г.
Что такое замкнутая система управления? Определение, работа и передаточная функция системы управления с обратной связью
Определение : Система управления с обратной связью — это тип системы управления, в которой управляющее воздействие показывает зависимость от генерируемого выходного сигнала системы. Проще говоря, в этих системах вывод системы контролирует ввод, применяемый к системе.
Проще говоря, в этих системах вывод системы контролирует ввод, применяемый к системе.
Изменение входных данных в соответствии с выходными приводит к более точному выходу системы. Таким образом, управляемость в системе с обратной связью достигается за счет выходного сигнала, генерируемого путем использования пути обратной связи.
Системы с замкнутым контуром считаются полностью автоматическими системами управления, поскольку они спроектированы таким образом, что достигнутый выходной сигнал автоматически сравнивается с эталонным входным сигналом для получения требуемого выходного сигнала.
Потребность в замкнутой системе управления
Мы уже обсуждали в нашей предыдущей статье систему управления. Система управления — это система, предназначенная для получения определенного результата за счет действия требуемого управления.
Теперь управление системой может быть либо независимым от выхода, либо зависимым от выхода. Это изменение приводит к двум различным категориям системы управления.
Система, в которой управляющее действие не зависит от генерируемого выходного сигнала системы, известна как система управления без обратной связи. В то время как в системе с обратной связью производимый выход управляет работой системы с помощью обратной связи.
В основном система с обратной связью была разработана для преодоления недостатков, связанных с системой без обратной связи. Мы знаем, что разомкнутые системы не обладают способностью автоматически обеспечивать точный выходной сигнал.
Все мы знаем, что основным требованием использования электрической или электронной системы является получение желаемого результата. И в любой системе, если измерение не выполняется и требуемый результат не достигается, становится практически невозможно получить точный отклик системы.
Таким образом, чтобы получить точную реакцию системы, проще всего сравнить приложенный ввод с полученным выводом. Это помогает в определении ошибки, которая присутствует внутри системы. Поэтому, как только ошибка измерена, ее можно уменьшить до минимально возможного значения, чтобы получить желаемый результат.
Поэтому, как только ошибка измерена, ее можно уменьшить до минимально возможного значения, чтобы получить желаемый результат.
Таким образом, в замкнутой системе на вход подается сигнал обратной связи. Этот сигнал обратной связи и опорный входной сигнал действуют как возбуждение системы для получения желаемого отклика. Таким образом, выход выполняет управляющее действие в замкнутой системе.
Что такое обратная связь?
До сих пор мы много раз использовали термин «обратная связь». Но надо четко знать, что на самом деле означает обратная связь?
Таким образом, в основном обратная связь действует как характеристика системы, которая позволяет сравнивать достигнутый результат и эталонный ввод системы.
Обратная связь обычно представляет собой часть выходного сигнала, которая возвращается к входному сигналу, чтобы их можно было сравнить и получить желаемый результат, если текущий выход отличается от желаемого выхода.
Таким образом, обратная связь считается ключевым параметром замкнутой системы управления.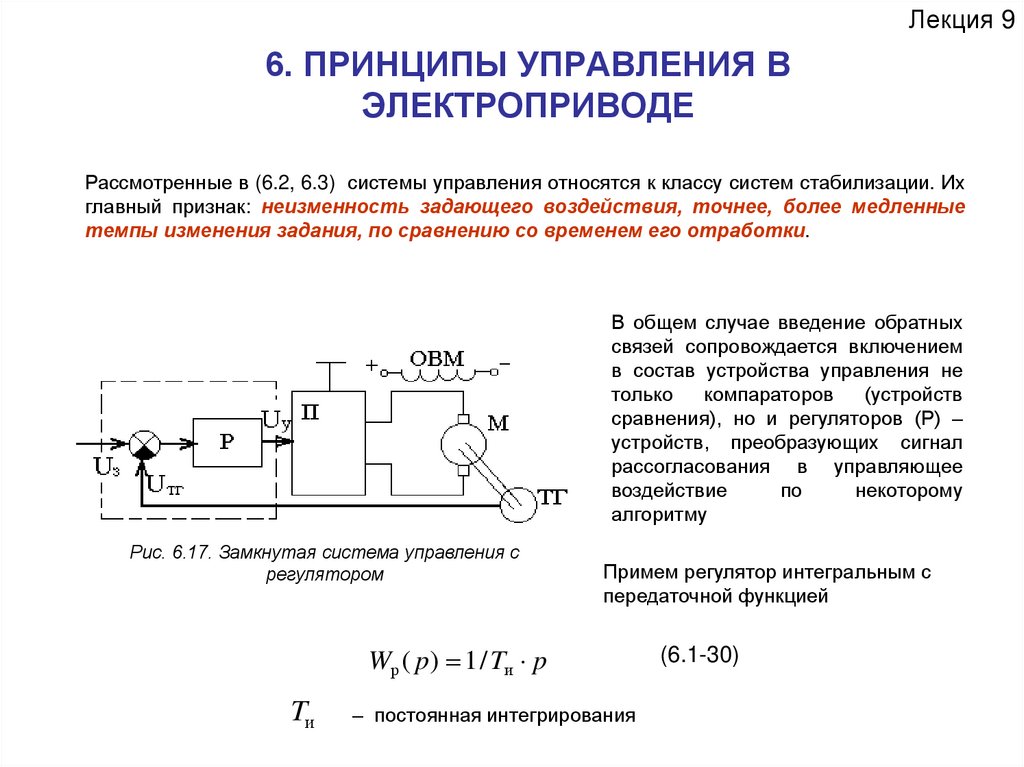
Обратная связь в любой цепи обычно может быть двух типов :
1. Положительная обратная связь : Тип обратной связи в системе управления, в которой входной сигнал и сигнал обратной связи находятся в фазе друг с другом, известна как система положительной обратной связи.
В этих системах к опорному входу добавляется сигнал обратной связи, что увеличивает усиление всей системы.
2. Отрицательная обратная связь : В случае отрицательной обратной связи входной сигнал и сигнал обратной связи показывают противофазное отношение друг к другу.
Таким образом, приложенный входной сигнал и сигнал обратной связи вычитаются, чтобы получить сигнал ошибки. Это приводит к уменьшению общего усиления системы.
Таким образом, мы можем сказать, что это фактор, который в наибольшей степени отвечает за желаемую реакцию системы.
Работа замкнутой системы
На этом рисунке показана подробная блок-схема системы управления с обратной связью:
Здесь, как мы видим, ввод команды подается на преобразователь.
Это так, потому что не всегда необходимо, чтобы доступный вход был приемлем для контроллера. Таким образом, в таких случаях ввод не может быть непосредственно применен к системе. Поскольку он должен быть изменен из одной формы в другую, чтобы он мог выполнять роль эталонного ввода для системы.
По этой причине входные данные изначально применяются к датчику, чтобы их можно было изменить в форме, приемлемой для системы в соответствии с характером контроллера и процесса.
Когда контроллер выдает управляющий сигнал в соответствии с поданным входом, внутри системы происходит требуемое действие в соответствии с генерируемым сигналом.
Это приводит к созданию определенного результата. Но необходимо измерить сгенерированный результат, чтобы определить, является ли он желаемым результатом или нет. Итак, для этого часть достигнутого результата отдается обратно на вход. Этот сигнал действует как сигнал обратной связи .
Этот сигнал обратной связи при сравнении с входным заданием генерирует сигнал ошибки. Этот сигнал ошибки далее подается на контроллер, который вырабатывает управляемый сигнал (пропорциональный сигналу ошибки), который представляет собой не что иное, как управляющий сигнал, который направляет процесс на устранение ошибки, тем самым обеспечивая желаемый результат.
Этот сигнал ошибки далее подается на контроллер, который вырабатывает управляемый сигнал (пропорциональный сигналу ошибки), который представляет собой не что иное, как управляющий сигнал, который направляет процесс на устранение ошибки, тем самым обеспечивая желаемый результат.
Достигнутый результат называется контролируемым выходом системы и имеет точность .
Передаточная функция замкнутой системы управления
Передаточная функция показывает поведение системы, поскольку она определяется как математическое соотношение между входом и выходом системы.
Коэффициент усиления системы определяет отношение выхода к входу. Таким образом, мы можем сказать, что выход системы является произведением передаточной функции и входа.
Рассмотрим систему с обратной связью, приведенную ниже:
Итак, для приведенной выше системы
При подстановке значения E(s) в 1 st уравнение
При транспонировании
Это передаточная функция замкнутой системы с отрицательной обратной связью.
Для системы с положительной обратной связью задается как:
Для системы с единичной обратной связью (т. е. H(s) = 0) с высоким значением усиления. Передаточная функция равна единице.
Замкнутая система управления – определение, схема, конструкция
Что такое замкнутая система управления?
Система управления с одним или несколькими путями обратной связи называется системой управления с обратной связью. Вот почему замкнутая система управления также известна как система управления с обратной связью.
Проектирование системы управления с обратной связью
Основная цель проектирования одинакова как для систем управления с обратной связью, так и для систем управления с обратной связью. В зависимости от наших требований к выходу мы устанавливаем входные данные для контроллера, который генерирует управляющий сигнал, и этот управляющий сигнал подается на блок обработки для получения выходного сигнала. На данный момент процесс и конструкция одни и те же для систем управления с разомкнутым и замкнутым контуром, но основное отличие состоит в том, что достигнутый выходной сигнал измеряется с помощью измерительного прибора для сравнения с заданным выходным значением. Следовательно, измерительный прибор действует как обратная связь с выходом. Детектор ошибок сравнивает измеренное значение с предварительно установленным значением выхода, и соответствующий управляющий сигнал отправляется на контроллер для корректировки выхода.
Следовательно, измерительный прибор действует как обратная связь с выходом. Детектор ошибок сравнивает измеренное значение с предварительно установленным значением выхода, и соответствующий управляющий сигнал отправляется на контроллер для корректировки выхода.
Загрузить формулы для электротехники GATE. Электромагнитная теория
Блок-схема системы управления с обратной связью
Основная блок-схема системы управления с обратной связью показана ниже.
В зависимости от потребностей пользователя и сложности системы может быть любое количество контуров обратной связи.
Примеры систем управления с обратной связью
Человеческие существа представляют собой наиболее сложные и изощренные системы управления с обратной связью из существующих. Поэтому рассмотрим пример сбора яблока со стола. Когда вы подходите к столу, мозг посылает вашей руке управляющий сигнал, чтобы сорвать яблоко, ваши глаза действуют как обратная связь, а расстояние между вашей рукой и яблоком является ошибкой. Мозг и глаза координируются, чтобы свести к минимуму ошибку и достичь цели — собрать яблоко. Если вам завязывают глаза и просят сорвать одно и то же яблоко, то обратная связь, что это ваши глаза, отсутствует; вы приближаетесь к объекту со слепой оценкой. Следовательно, есть шанс, что вы можете пропустить яблоко со значительным отрывом. Итак, в первом случае ваше тело действует как замкнутая система управления с обратной связью в виде глаз; во втором случае ваше тело действует как разомкнутая система управления.
Мозг и глаза координируются, чтобы свести к минимуму ошибку и достичь цели — собрать яблоко. Если вам завязывают глаза и просят сорвать одно и то же яблоко, то обратная связь, что это ваши глаза, отсутствует; вы приближаетесь к объекту со слепой оценкой. Следовательно, есть шанс, что вы можете пропустить яблоко со значительным отрывом. Итак, в первом случае ваше тело действует как замкнутая система управления с обратной связью в виде глаз; во втором случае ваше тело действует как разомкнутая система управления.
Точно так же, если эта предполагаемая система может исправить ошибку, используя обратную связь, обеспечиваемую в виде измерительных приборов и различных контроллеров, то в этом случае системы являются лучшими примерами систем управления с замкнутым контуром, таких как автоматические системы освещения, автоматические регуляторы напряжения, беспилотные локомотивы и т. д.
Загрузить формулы для электротехники GATE — электрические машины
Каноническая форма замкнутой системы управления
Let,
- X i (s)→Входной сигнал
- X 0 (s)→Выходной сигнал
- G(s)→Передаточная функция разомкнутой системы управления
- H(s)→Коэффициент усиления элементов в цепи обратной связи
- B(s)→Вывод элементов обратной связи
- E(s)→Сигнал ошибки
Тогда замкнутая система управления может быть представлена, как показано ниже.
Из диаграммы выше
G(s)=X 0 (s)/E(s)
⇒E(s)=X 0 (s)/G(s)
E(s) также может быть записано как
E(s)=X i (s)−B(s)
⇒X 0 (s) )/G(s)=X i (s)−B(s)
Из диаграммы
H(s)=B(s)/X 0 (s)
⇒X 0 (s)/G(s)=X i (s)−H(s)X 0 (s)
⇒X 0 (s)=G(s)X i (s) )−G(s)H(s)X 0 (s)
⇒X 0 (s)[1+G(s)H(s)]=G(s)X i (s) )
⇒ Х 0 (s)/X i (s)=G(s)/1+G(s)H(s)
Это стандартная форма представления замкнутой системы управления с отрицательной обратной связью. Однако точка суммирования (⊗) может иметь более одного входа обратной связи в виде отрицательной обратной связи (обратная связь будет вычтена из входа) или положительной обратной связи (обратная связь будет добавлена к информации). Тем не менее, его выход будет алгебраической суммой всех входов.
Влияние обратной связи на производительность системы
Конструкция обратной связи в системе управления с замкнутым контуром отвечает за точный и эффективный выход системы. Тем не менее, мы должны пойти на компромисс в некоторых системных параметрах, чтобы получить это преимущество. Здесь мы обсудим, как обратная связь влияет на ключевые параметры системы.
Влияние на усиление системы
Если G(s) — усиление системы управления без обратной связи, то из стандартной формы системы управления с обратной связью мы можем наблюдать, что обратная связь влияет на усиление с коэффициентом 1 +G(s)H(s). Нет правила, согласно которому величина GH всегда должна быть больше 1, так как это будет отрицательная или положительная величина, поэтому в зависимости от этого значения и типа обратной связи усиление может увеличиваться или уменьшаться.
На практике G(s) и H(s) являются частотными параметрами, поэтому значение 1+G(s)H(s) может быть меньше единицы в одном частотном диапазоне и может быть больше единицы в другом диапазоне частот. частоты. Следовательно, обратная связь, несомненно, повлияет на усиление системы, но то, как изменится усиление, будет зависеть от значения 1+G(s)H(s).
частоты. Следовательно, обратная связь, несомненно, повлияет на усиление системы, но то, как изменится усиление, будет зависеть от значения 1+G(s)H(s).
Влияние на чувствительность
Чувствительность является одним из наиболее важных соображений при проектировании системы управления, поскольку свойства элементов, задействованных в проекте, меняются в зависимости от возраста и условий окружающей среды. Например, электрические свойства трансформатора меняются в зависимости от температуры и возраста машины.
Система управления обладает высокой чувствительностью, если на ее цель управления воздействуют какие-либо внутренние или внешние помехи. В любой системе управления желательно, чтобы она была менее чувствительна к внешним возмущениям. Здесь мы обсудим, насколько чувствительна замкнутая система управления к возмущениям на ее прямом пути и пути обратной связи.
Если 𝛼 является переменной, которая изменяет свое значение,
𝛽 является параметром, который изменяет значение 𝛼, тогда чувствительность 𝛼 относительно 𝛽 определяется как
S 𝛼 β =% изменения % изменения в β = ∂𝛼/𝛼/∂𝛽/𝛽
S 𝛼 β = 𝛽∂𝛼/𝛼∂𝛽
Случай для замкнутой системы управления логической ошибкой (0): 90 в элементах прямого пути.
Пусть 𝛼 — замкнутая система управления M(s),
M(s)= G(s)/[1+G(s)H(s)]
И β – возмущение в элементах прямого тракта, то есть G(s), тогда
S M( s) G(s) =G(s)∂M(s)/M(s)∂G(s)
Из уравнения M(s) мы можем написать,
G(s) /M(s)=1+G(s)H(s)
∂M(s)/∂G(s)={[1+G(s)H(s)](1)−G(s )H(s)}/(1+G(s)H(s)) 2
⇒S M(s) G(s) =1+G(s)H(s)/ (1+G(s)H(s)) 2
⇒S M(s) G(s) =1/1+G(s)H(s)
Таким образом, в этом случае функцию чувствительности можно сделать малой, увеличив значение G(s)H(s).
Случай (ii): Чувствительность замкнутой системы управления к возмущениям, возникающим в элементах цепи обратной связи.
Пусть α=M(s)𝛼=M(s), β=H(s)𝛽=H(s)
⇒S M(s) H(s) =H(s)∂ M(s)/M(s)∂H(s)
Из уравнения M(s) можно написать:
H(s)/M(s)=[1+G(s)H( с)]H(s)/G(s)
⇒S M(s) G(s) =G(s)H(s)/1+G(s)H(s)
В этом случае сложно минимизировать чувствительность, поэтому замкнутая система управления или система управления с обратной связью более чувствительна к возмущениям в элементах обратной связи.