Типовые схемы рулевого управления погрузчиков
Категория:
Электропогрузчики
Публикация:
Типовые схемы рулевого управления погрузчиков
Читать далее:
Рулевой механизм погрузчиков
Типовые схемы рулевого управления погрузчиков
В каждом рулевом управлении можно выделить две основные части — рулевой привод и рулевой механизм. В погрузчиках с четырехопорной схемой ходовой части применяется автомобильный тип рулевого управления, он выполняется с рулевой трапецией. В погрузчиках с трехопорной схемой рулевой привод выполнен с поворотным вертикальным валом (электропогрузчик ПТШ-3) или с поворотным стаканом (электропогрузчик 4015).
На изучаемых погрузчиках применяется рулевая трапеция разрезного типа. Такая рулевая трапеция состоит из балки, поворотных кулаков с рычагами, разрезной поперечной тяги и трехплечего рычага. Все эти детали соединяются шарнирно, так что колеса могут поворачиваться вокруг шкворней.
Рулевой механизм преобразует вращение рулевого колеса в поступательное движение продольной тяги, связанной с трехплечим рычагом рулевого привода.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
Балка управляемого моста погрузчика ПТШ-3 устанавливается в вилке вертикального поворотного шкворня. Верхний конец шкворня жестко соединяется с рычагом. Усилие рулевого механизма передается продольной рулевой тяге, а с нее через шкворен и сошку рулевого механизма на управляемую ось.
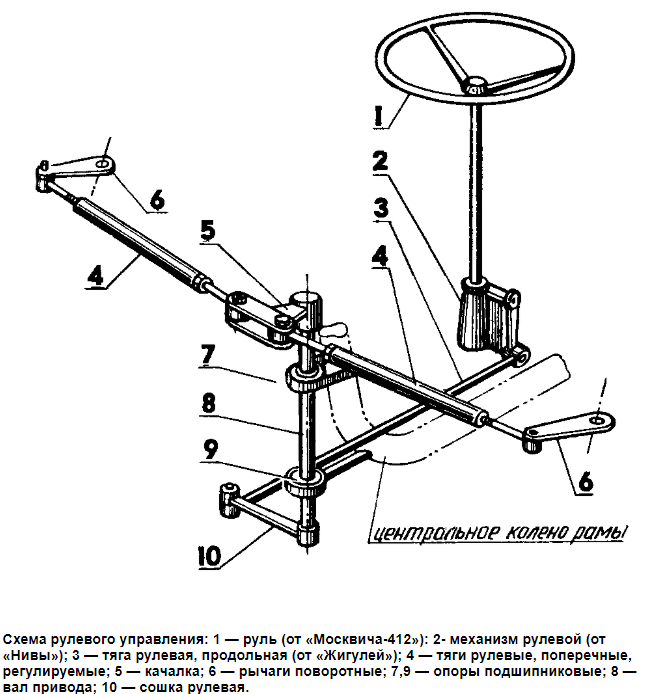
Рис. 1. Принципиальная схема рулевого управления погрузчика с четырехопорной ходовой частью: 1 — балка управляемого моста, 2 — поворотные кулаки, 3— разрезная поперечная тяга, 4 — рычаг кулака, 5 — продольная тяга, 6 — червяк рулевого механизма, 7 — рулевое колесо, 8 — зубчатый сектор рулевого механизма, 9 — трехплечий рычаг, 10— шкворни
Колесо поворачивается вместе с корпусом главной передачи, который может вращаться в неподвижном корпусе в шариковых радиально-упорных подшипниках. Поворот происходит под воздействием цепи. Она огибает диск на картере и зубчатое колесо рулевого механизма. Зубчатое колесо вращается вертикальным валом, который в свою очередь через пару зубчатых колес получает вращение от рулевого колеса.
Поворот происходит под воздействием цепи. Она огибает диск на картере и зубчатое колесо рулевого механизма. Зубчатое колесо вращается вертикальным валом, который в свою очередь через пару зубчатых колес получает вращение от рулевого колеса.
Рассмотренные схемы рулевого управления обеспечивают поворот управляемых колес под непосредственным воздействием мускульного усилия водителя на рулевое колесо. Уменьшение этого усилия является одной из главных задач конструкторов. Однако инженерные возможности рассмотренных схем в этом отношении практически исчерпаны, так как внедренные конструкции рулевых механизмов и приводов имеют сравнительно высокий к.п.д., но тем не менее затрудняют управления погрузчиками большой грузоподъемности.
Были предприняты попытки решить эту проблему увеличением передаточного отношения рулевого механизма. Например, в рулевом правлении погрузчика ПТШ-3 между рулевым колесом и рулевым механизмом был установлен дополнительный редуктор, снизивший Требуемое усилие на рулевое колесо. Однако необходимое при этом большое число оборотов рулевого колеса не позволило принять это решение.
Однако необходимое при этом большое число оборотов рулевого колеса не позволило принять это решение.
На электропогрузчиках семейства Ф7 грузоподъемностью 3000 кГ применена машинная схема рулевого управления. Водитель поворотом рулевого колеса воздействует на блок управления специальной гидромеханической системы, которая под воздействием высокого давления рабочей жидкости, создаваемого насосом, приводит в действие гидроусиливающее устройство, связанное с рулевым приводом.
Рис. 2. Принципиальная схема рулевого управления погрузчика ПТШ-З: 1 — продольная рулевая тяга, 2 — балка управляемого моста, 3 — колесо, 4 — рычаг поворотного шкворня, 5 — поворотный шкворень, 6,8 — рулевой механизм, 7 — рулевое колесоРис. 3. Принципиальная схема рулевого управления погрузчика 4015: 1 — корпус главной передачи, 2 — колесо, 3 — радиально-упорные подшипники, 4 — цепь, 5,8 — под иипники рулевого механизма, 6, 9 — зубчатые колеса рулевого механизма, 7 — рулевое колесо, 10—вертикальный вал, 11 — зубчатое колесо, 12 — ведомый диск
Анализ конструктивных схем активного рулевого управления
Авторы: Свечников Дмитрий Анатольевич, Малий Владимир Иванович, Кузьмин Никита Александрович, Фень Александр Александрович
Рубрика: Технические науки
Опубликовано в
Молодой учёный
№49 (287) декабрь 2019 г.
Дата публикации: 04.12.2019 2019-12-04
Статья просмотрена: 82 раза
Скачать электронную версию
Скачать Часть 3 (pdf)
Библиографическое описание:Свечников, Д. А. Анализ конструктивных схем активного рулевого управления / Д. А. Свечников, В. И. Малий, Н. А. Кузьмин, А. А. Фень. — Текст : непосредственный // Молодой ученый. — 2019. — № 49 (287). — С. 206-209. — URL: https://moluch.ru/archive/287/64783/ (дата обращения: 28.01.2023).
Статья раскрывает сущность активного рулевого управления, принцип работы, преимущества и недостатки его применения, проводиться анализ и сравнение рулевых управлений, работающих по разным принципам. Кроме того, описывается проблема, связанная с обеспечением безопасности дорожного движения и значение применения активного рулевого управления в отечественном автомобилестроении.
Кроме того, описывается проблема, связанная с обеспечением безопасности дорожного движения и значение применения активного рулевого управления в отечественном автомобилестроении.
Ключевые слова: рулевое управление, безопасность дорожного движения.
Современный мир сложно представить без автомобилей. Как известно автомобиль является средством повышенной опасности и обеспечение безопасного управления им является важнейшей задачей в системе обеспечения безопасности дорожного движения. Одним из путей решения задачи обеспечения безопасного управления автомобилем является разработка рулевого управления автомобиля, которое будет способствовать облегчению управления транспортным средством и повысит управляемость автомобиля при его эксплуатации.
Большинство водителей, садясь за руль транспортного средства, не имеют представления о том, что такое рулевое управление. Рулевое управление — это система управления направлением движения транспортного средства с помощью рулевого колеса, оно состоит из механизмов, преобразующих положение руля в пропорциональное изменение положения управляемых колёс или аналогичных управляющих направлением движения элементов.
В большинстве транспортных средств используется обычное рулевое управление с постоянным передаточным числом, при этом значение передаточного числа достаточно велико. Такое управление имеет положительные и отрицательные стороны. К положительным можно отнести низкую склонность к передаче ударов от дорожных неровностей с управляемых колёс на рулевое колесо, возможность передачи больших усилий, безопасное вождение на повышенных скоростях. Недостатками являются трудности при парковке и вождении в стеснённых условиях, так как количество оборотов рулевого колеса от упора до упора достаточно велико.
В современном мире огромным прорывом в области управления транспортным средством является применение активного рулевого управления, особенность которого заключается в изменении передаточного числа рулевого механизма, в зависимости от скорости движения транспортного средства, и воздействия водителя на рулевое колесо, что облегчает и повышает безопасность управления транспортным средством.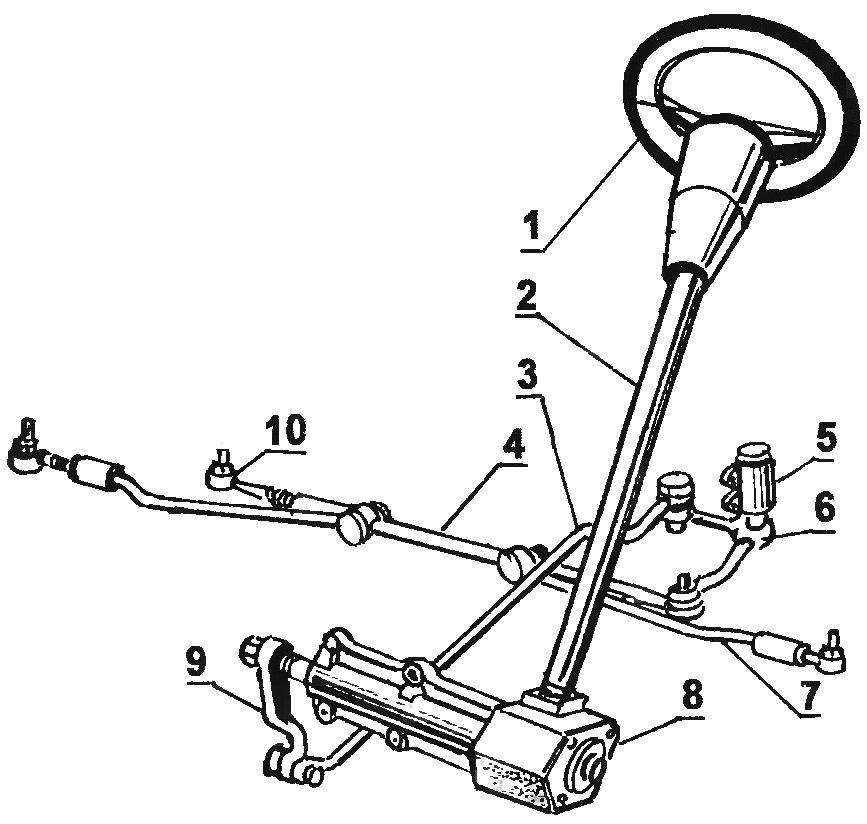
Одним из таких рулевых управлений является разработка инженеров BMW, носящая название система активного рулевого управления AFS. Суть разработки состоит в том, чтобы изменять реакцию колёс на вращение руля в зависимости от скорости машины. Так, к примеру, если вы решили припарковаться в сложном для этого месте, вам не придётся крутить рулём по несколько оборотов, чтобы вывернуть колеса — электроника отследит скорость, и передаточное число рулевого механизма снизиться до минимума. На больших скоростях такая реакция, наоборот, вызывает дискомфорт и даже опасна, поэтому передаточное число увеличивается, и машина реагирует на руль более плавно. Можно подумать, что система активного рулевого управления очень сложна. На самом деле это не так, и принцип её работы довольно прост.
Ключевыми элементами AFS является: планетарный редуктор, блок управления, комплект датчиков [1].
Данная технология неразрывно связана с механизмом рулевого управления. В целом все выглядит так: в разрез рулевого вала вмонтирован блок с планетарным редуктором (рис.
Рис. 1. Разрез рулевого вала с планетарным редуктором система активного рулевого управления AFS
При движении автомобиля на поворотах при небольшой скорости, электродвигатель (рис. 2) подкручивает в одну сторону коронную шестерню, тем самым увеличивает передаточное число. При движении на больших скоростях электродвигатель подкручивает коронную шестерню в другую сторону, тем самым уменьшает передаточное число.
Исходя из такого принципа работы можно сделать вывод о том, что при воздействии на рулевое колесо управляемые колёса автомобиля будут поворачиваться на необходимый угол для обеспечения хорошей управляемости и безопасности движения.
Рис. 2. Схема активного рулевого управления AFS: 1 — насос гидроусилителя руля; 2 — шланги; 3 — бачок для рабочей жидкости; 4 — электронный блок управления; 5 — шина обмена данными; 6 — электродвигатель; 7 — датчик угла поворота электродвигателя; клапан системы Servotronic; 9 — планетарный редуктор; 10 — аварийный фиксатор;
11 — датчик суммарного угла поворота; 12 — рулевой механизм
Положительной стороной данной системы является то, что есть возможность изменения передаточного числа в зависимости от скорости автомобиля. Недостатком данной системы является наличие червячной передачи, сложность технологии изготовления, а также необходимость применения высокомоментного двигателя.
Недостатком данной системы является наличие червячной передачи, сложность технологии изготовления, а также необходимость применения высокомоментного двигателя.
В 2014 году произошёл «психологический прорыв» в проектировании рулевого управления транспортных средств, связанный с отказом от жёсткой связи между рулевым колесом и управляемыми колёсами. Ярким примером такого рулевого управления является рулевое управление автомобиля Infiniti, марки Q50. Суть указанного типа рулевого управления заключается в том, что рулевое колесо не имеет жёсткой связи с рулевым валом, а поворот колёс осуществляют два электродвигателя, которые перемещают рулевую рейку. Скорость вращения электродвигателей регулируют три независимых блока управления, которые подают соответствующие сигналы на двигатели в зависимости от скорости движения транспортного средства и поворота рулевого колеса. Силовое воздействие на рулевое колесо обеспечивает электродвигатель обратной связи, который в зависимости от условий езды, создаёт необходимое усилие для обеспечения «чувства дороги». Однако у указанного устройства, как и у любого есть свои плюсы и минусы. Положительным является то, что имеется возможность широкого изменения передаточного числа в зависимости от движения данного транспортного средства, за счёт этого повышается безопасность и удобство управления транспортным средством. В отрицательную сторону можно отметить то, что при любом существенном отказе элементов системы включается аварийный режим, обеспечивающий жёсткую связь между рулевым колесом и рулевой рейкой, при этом рулевое управление перестаёт быть активным. Кроме того, из отзывов водителей, обладающих автомобилем с данной системой выявлен ещё один недостаток, заключающийся в том, что при использовании автомобиля в холодных климатических условиях выходит из строя электроника, отказывают блоки управления и система приходит в негодность, из-за чего использовать данный автомобиль довольно критично или даже страшно, особенно на просторах территории Российской Федерации, ведь на первом месте стоит безопасность дорожного движения, а следовательно сохранение жизни и здоровья человека (водителя, пассажира, пешехода) [2].
Однако у указанного устройства, как и у любого есть свои плюсы и минусы. Положительным является то, что имеется возможность широкого изменения передаточного числа в зависимости от движения данного транспортного средства, за счёт этого повышается безопасность и удобство управления транспортным средством. В отрицательную сторону можно отметить то, что при любом существенном отказе элементов системы включается аварийный режим, обеспечивающий жёсткую связь между рулевым колесом и рулевой рейкой, при этом рулевое управление перестаёт быть активным. Кроме того, из отзывов водителей, обладающих автомобилем с данной системой выявлен ещё один недостаток, заключающийся в том, что при использовании автомобиля в холодных климатических условиях выходит из строя электроника, отказывают блоки управления и система приходит в негодность, из-за чего использовать данный автомобиль довольно критично или даже страшно, особенно на просторах территории Российской Федерации, ведь на первом месте стоит безопасность дорожного движения, а следовательно сохранение жизни и здоровья человека (водителя, пассажира, пешехода) [2].
Таким образом, можно сделать вывод о том, что указанная выше система решает ряд определённых задач, но требует доработок в электронике, чтобы минимизировать отказ системы в различных дорожных условиях. Кроме того, усложняется техническое обслуживание системы рулевого управления водителем, связанная со сложной компоновкой сочленённых узлов, а также непростой электроникой, установленной на этих системах, в которой не каждому водителю дано разобраться.
Несмотря на имеющиеся недостатки, будущее безусловно за системами активного рулевого управления и несомненно скоро мы увидим их новые конструкции.
Анализ аварийности на дорогах Российской Федерации показывает, что в дорожно-транспортных происшествиях (ДТП) ежегодно погибают 27000 человек, и причиной совершения многих ДТП является наличие неисправности одной из систем автомобиля. По сравнению с 2016 годом в 2018 году процент таких ДТП увеличился на 20 %, в том числе в эти 20 % входят проблемы, возникающие с рулевым управлением, порой для предотвращения ДТП не хватает небольшого поворота рулевого колеса.
Проблема обеспечения безопасности дорожного движения, приводит в том числе и к выводу о необходимости разработки в отечественной автомобильной промышленности конструкции активного рулевого управления, что в значительной мере должно привести к сокращению количества ДТП и обеспечить более высокий уровень безопасности дорожного движения на дорогах Российской Федерации.
Литература:
- Журнал «За рулём», № 10, 2002, «На пути к джойстику» А. Фомин стр. 68–72.
- Журнал «За рулём», № 1, 2014, «Драйв нерукотворный», В. Соловьёв, стр. 36–39.
Основные термины (генерируются автоматически): рулевое колесо, рулевое управление, активное рулевое управление, передаточное число, транспортное средство, AFS, дорожное движение, планетарный редуктор, система, Российская Федерация.
Ключевые слова
безопасность дорожного движения, рулевое управлениерулевое управление, безопасность дорожного движения
Похожие статьи
Общий анализ неисправностей
рулевого управления. ..
..Рулевое управление является одной из важнейших систем, влияющих на безотказность дорожного движения. Повышение показателей надежности рулевого управления является важной задачей.
Анализ повреждений
рулевого управления современного…Рулевое управление является одной из важнейших систем автомобиля, обеспечивающих его активную безопасность.
Дорожно—транспортное происшествие (ДТП) — это событие, возникшее в процессе движения по дороге транспортного средства и с его участием, при…
Выбор оптимального метода диагностирования
рулевого привода…Суммарный люфт в рулевом управлении проверяют на неподвижном транспортном средстве количественно, с использованием приборов, фиксирующих угол поворота рулевого колеса и начало поворота управляемых колес совместно.
Переходные характеристики машины при скачкообразном…
Переходные характеристики рулевого управления при различных передаточных числах скорость движения 20 км/ч рулевого управления: 1–12,8; 2–16,2; 3–21,5; 4–31,0. При расчетах время, за которое рулевое колесо поворачивалось на угол 65°, принималось равным 0,265 с…
Исследование управляемости
транспортного средства при…В статье приводится схема подвески передних управляемых колес с дополнительным упругим элементом, введенным в рулевое управление, и обеспечивающим улучшенные показатели управляемости.
Принцип работы
системы курсовой устойчивости автомобиляESP — активная система безопасности автомобиля, позволяющая предотвратить занос посредством управления компьютером момента силы колеса (одновременно одного или нескольких). Основной задачей системы электронной стабилизации ESP является…
Основной задачей системы электронной стабилизации ESP является…
Уголовно-правовая характеристика нарушений правил
дорожного…Правилами дорожного движения Российской Федерации
Правилами дорожного движения Российской Федерации, а именно разделом 5 под названием «Обязанности пассажиров» также.
дорожное движение, УК РФ, транспортное средство, нарушение правил, средство…
Планетарная передача | Статья в журнале «Молодой ученый»Планетарная передача – механическая передача вращательного движения, имеющая зубчатое колесо с подвижными геометрическими осями. Подвижность оси обеспечивает компактность механизма и уменьшает массу (или габариты) передачи.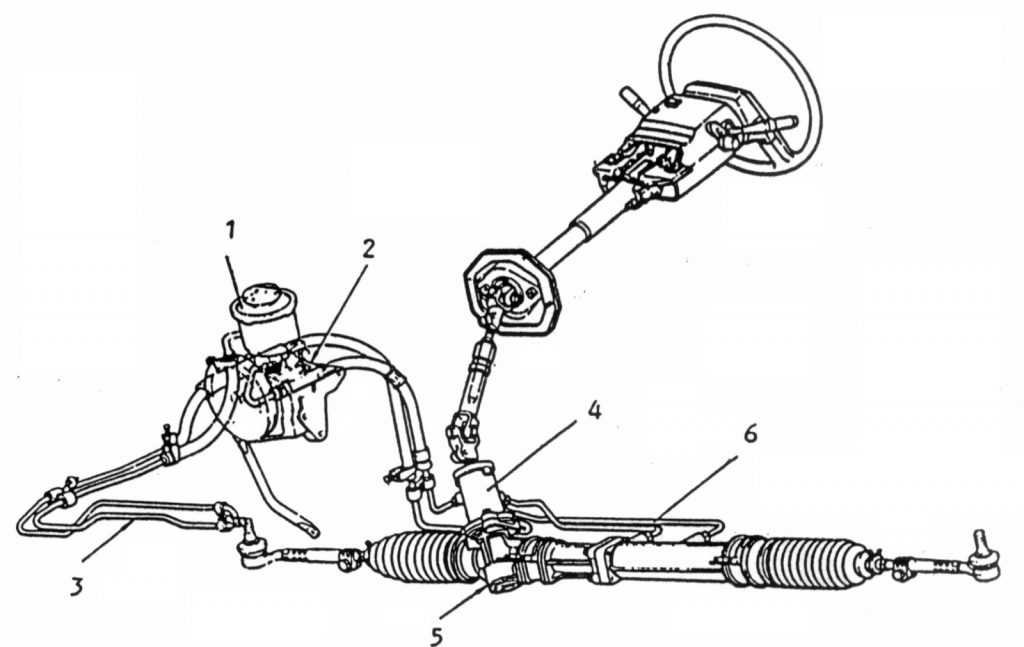 Можно получить систему с двумя и…
Можно получить систему с двумя и…
Навигационные
системы для систем автоматического…Для обеспечения управления автомобилем без участия человека используются системы управления
Анализ систем управления беспилотных автомобилей выявил большое число проблем
Таким образом, движение автомобиля в плохую погоду (сильный дождь, туман…
Похожие статьи
Общий анализ неисправностей
рулевого управления… Рулевое управление является одной из важнейших систем, влияющих на безотказность дорожного движения. Повышение показателей надежности рулевого управления является важной задачей.
Анализ повреждений
рулевого управления современного…Рулевое управление является одной из важнейших систем автомобиля, обеспечивающих его активную безопасность.
Дорожно—транспортное происшествие (ДТП) — это событие, возникшее в процессе движения по дороге транспортного средства и с его участием, при…
Выбор оптимального метода диагностирования
рулевого привода…Суммарный люфт в рулевом управлении проверяют на неподвижном транспортном средстве количественно, с использованием приборов, фиксирующих угол поворота рулевого колеса и начало поворота управляемых колес совместно.
Переходные характеристики машины при скачкообразном…
Переходные характеристики рулевого управления при различных передаточных числах скорость движения 20 км/ч рулевого управления: 1–12,8; 2–16,2; 3–21,5; 4–31,0. При расчетах время, за которое рулевое колесо поворачивалось на угол 65°, принималось равным 0,265 с…
Исследование управляемости
транспортного средства при…В статье приводится схема подвески передних управляемых колес с дополнительным упругим элементом, введенным в рулевое управление, и обеспечивающим улучшенные показатели управляемости.
Принцип работы
системы курсовой устойчивости автомобиляESP — активная система безопасности автомобиля, позволяющая предотвратить занос посредством управления компьютером момента силы колеса (одновременно одного или нескольких). Основной задачей системы электронной стабилизации ESP является…
Основной задачей системы электронной стабилизации ESP является…
Уголовно-правовая характеристика нарушений правил
дорожного…Правилами дорожного движения Российской Федерации
Правилами дорожного движения Российской Федерации, а именно разделом 5 под названием «Обязанности пассажиров» также.
дорожное движение, УК РФ, транспортное средство, нарушение правил, средство…
Планетарная передача | Статья в журнале «Молодой ученый»Планетарная передача – механическая передача вращательного движения, имеющая зубчатое колесо с подвижными геометрическими осями. Подвижность оси обеспечивает компактность механизма и уменьшает массу (или габариты) передачи. Можно получить систему с двумя и…
Можно получить систему с двумя и…
Навигационные
системы для систем автоматического…Для обеспечения управления автомобилем без участия человека используются системы управления
Анализ систем управления беспилотных автомобилей выявил большое число проблем
Таким образом, движение автомобиля в плохую погоду (сильный дождь, туман…
СХЕМА РУЛЕВЫХ ЧАСТЕЙ — Classic Alfa
Вот схема, показывающая расположение некоторых частей этой категории.
Текущий запас:
- сопутствующие товары
- Клиенты также просмотрели
Схема деталей карданного вала
Вот схема, показывающая расположение некоторых частей этой категории.
SU132 ПОЛНЫЙ КОМПЛЕКТ ИЗ 6 НАКОНЕЧНИКОВ ТРАК
Полный набор наконечников поперечной рулевой тяги — 4 внешних с левой и правой резьбой и 2 внутренних с левой и правой резьбой для замены всех наконечников рулевой тяги в автомобилях серии 105. Купите этот набор и сделайте…
68,28 €
SU132/1 ПОЛНЫЙ НАБОР ИЗ 6 НАКОНЕЧНИКОВ ТРАК…
Полный набор наконечников рулевых тяг LEMFORDER — 4 внешних с левой и правой резьбой и 2 внутренних с левой и правой резьбой для замены всех наконечников рулевых тяг в автомобилях серии 105.
193,46 €
Схема деталей карданного вала
Вот схема, показывающая расположение некоторых частей этой категории.
SU110/1 CLASSIC ALFA КОМПЛЕКТ ДЛЯ ПЕРЕМЕЩЕНИЯ НОЖЕВОЙ БАРЫ
Классический комплект управления Alfa. Разработан и обновлен для нас легендарным бывшим водителем Autodelta и ведущим британским консультантом по подвеске Родди Харви-Бейли. Лучший комплект на рынке по соотношению цена-качество…
551,93 €
SU156 LATE BURMAN КОРПУС РУЛЕВОЙ КОРОБКИ LHD
Корпус рулевого механизма для леворульных рулевых механизмов Burman поздних версий. Пожалуйста, сравните с существующим корпусом перед покупкой. Обратите внимание, резьбовые отверстия в этих новых корпусах были изменены с…
597,45 €
Посмотреть товарНет в наличии
Рулевое управление в судоходстве, типы, схемы, правила
Что такое рулевое управление?
Рулевой механизм — это оборудование, предусмотренное на судах для поворота судна из левого борта (левый борт) в правый борт (правый борт) или правого борта в левый во время движения судна во время плавания.
Примечание:- Работает только когда корабль в движении и не работает когда корабль стоит.
Грузоподъемность
Мощность рулевого привода должна быть такой, чтобы руль можно было поворачивать от 35° левого борта до 35° правого борта и наоборот, и он должен иметь возможность поворачивать руль направления от 30° в одну сторону до 35° в другую сторону в пределах 28 секунды.
Примечание: — Рулевой механизм работает только тогда, когда корабль находится в движении.
Обязательно прочтите: Генератор пресной воды
Основные компоненты системы рулевого управления
В система рулевого управления , рулевой привод обеспечивает движение руля по сигналу с мостика.
3 основные части системы рулевого управления
а) Контрольное оборудование : Контрольное оборудование передает сигнал желаемого угла поворота руля от рулевой плоскости, где он принимается, чтобы активировать силовой агрегат и систему трансмиссии до тех пор, пока не будет достигнут желаемый угол .
b) Блок питания :- блок питания обеспечивает усилие, когда требуется и с немедленным усилием, чтобы переместить руль направления на желаемый угол.
c) Блок трансмиссии к баллеру руля :- Система трансмиссии (рулевой механизм) – это средство, с помощью которого осуществляется движение руля направления.
Примечание. Управляющее оборудование может представлять собой гидравлическое управляющее оборудование (известное как телемотор) или электрическое электронное управляющее оборудование.
Рулевое управление (телемоторный передатчик) на ходовом мостике, который посылает электрические сигналы на телемоторный приемник в рубке корабля.
Этот телемоторный приемник в отделении рулевого управления посылает электрические сигналы на электромагнитные клапаны управления направлением движения.
Какие типы рулевых механизмов используются на кораблях? Типы гидравлической трансмиссии или рулевого механизма
Они бывают двух типов: —
a) Тип ползуна (может быть 2 или 4 ползуна)
b) Роторно-лопастной тип
Здесь мы обсудим систему рулевого механизма поршневого типа
Система рулевого механизма поршневого типа Рабочая
Рабочая
) гидравлический цилиндр, будет происходить скользящее движение домкратов слева направо. Через траверсу RAM румпель будет двигаться к правому борту, а руль направления — к левому.
Через траверсу RAM румпель будет двигаться к правому борту, а руль направления — к левому.
Мгновенная прокачка наклоняется, движение рукоятки румпеля останавливается, а руль гидравлически блокируется в этом новом положении, так как теперь масло не имеет возможности вытекать и полностью заблокировано в гидроцилиндрах и наоборот.
Двухцилиндровый рулевой механизм РабочийНа рисунке показано расположение двухцилиндрового рулевого механизма.
При повороте руля сигнал поступает на телемоторный приемник через телемоторный передатчик, который управляет ловчим снаряжением.
Вращение охотничьего снаряжения Перемещает рабочий шпиндель насоса с регулируемой подачей (типа Hele Shaw или с наклонной шайбой) из нейтрального положения.
При этом насос начинает качать в один гидроцилиндр, а из другого гидроцилиндра масло подсасывается к насосу. И таран приходит в движение и это движение передается через румпель на баллер руля и руль направления.
Движение руля заставляет охотничий механизм перемещаться таким образом, что после достижения желаемого угла поворота руля рабочий шпиндель насоса возвращается в нейтральное положение, и руль направления больше не остается в желаемом угловом положении.
4-цилиндровый рулевой механизм РабочийНа приведенной выше схеме показано устройство четырехцилиндрового рулевого механизма.
Рабочий
Когда сигнал от телемоторной системы приводит в действие охотничий механизм, он приводит в действие насосы переменной подачи в положение нагнетания, таким образом, масло течет к двум цифрам, расположенным по диагонали напротив цилиндра (скажем, 1 и 4) из двух других цилиндров (второго и третьего). масло попадает в насос.
Заставляет руль направления поворачиваться по часовой стрелке. Если из-за действия телемоторной системы поворотный механизм переместится в другую сторону, то масло будет подаваться в цилиндры 2 и 3, а из 1 и 4 масло будет поступать в насос и таким образом руль направления будет поворачиваться против часовой стрелки.
При повороте руля охотничье снаряжение перемещается таким образом, что после достижения желаемого положения рычаг управления насосом переводит насос в нейтральное положение, а желаемое положение руля сохраняется.
Каждый цилиндр оснащен запорным клапаном. Имеются два перепускных клапана и предохранительный клапан, соединяющие цилиндры 1 и 2 и цилиндры 3 и 4.
В случае избыточного давления в цилиндре (что может произойти из-за удара по рулю направления)
Подпружиненный перепускной клапан откроется автоматически приводит к обходу подключенного цилиндра.
В системе предусмотрен пополняющий бак для восполнения любой потери гидравлического масла.
Меры безопасности в системе рулевого управления на судне
A) Запорный клапан : — запорные клапаны предусмотрены на каждом цилиндре и количестве вращающихся лопастей, которые в закрытом состоянии будут удерживать руль, задерживая масло в камерах. Насосы также оснащены запорными клапанами, поэтому что насос может быть полностью отключен от контура и удален для обслуживания, в то время как рулевое управление будет продолжаться с другими насосами.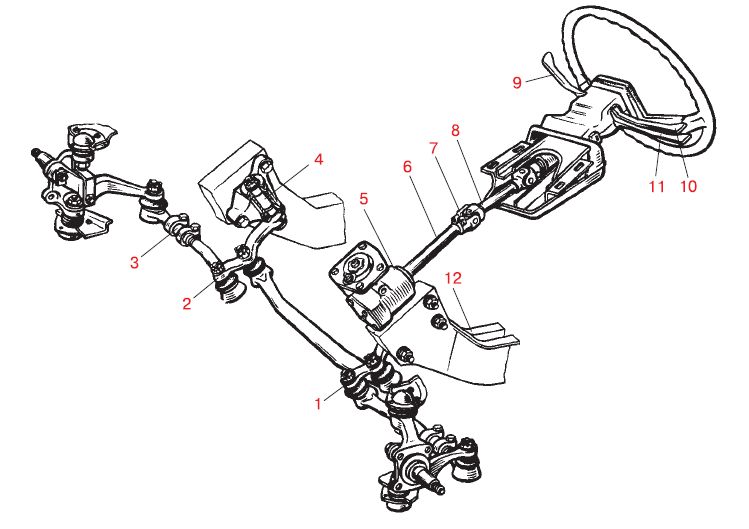
B) Перепускной клапан :-. Перепускные клапаны обычно закрыты, но могут быть открыты на двухцилиндровом редукторе, чтобы обеспечить возможность использования аварийного рулевого управления. Одна пара цилиндров может быть перепущена на четырехцилиндровом редукторе, в то время как другая пара цилиндров обеспечивает аварийное рулевое управление при пониженном крутящем моменте.
C) Предохранительные клапаны :- Предохранительные клапаны устанавливаются между дополнительной парой цилиндров или камерами лопастных шестерен. Они настроены на подъем при давлении выше нормального максимума.
D) Амортизационные клапаны установлены в трубопроводе системы между цилиндрами для предотвращения чрезмерной ударной нагрузки от руля из-за передачи сильного волнения на гидравлическую систему.
Какие устройства безопасности для системы рулевого управления
Безопасные устройства —
- Охотничья передача
- Буферная пружина
- Угол.
 Регулирующая остановка (переключатель лимита с ограниченной позицией)
Регулирующая остановка (переключатель лимита с ограниченной позицией) - Двойной удар клапана
- Свободный клапан
- Уровень бака.
Как работает рулевой механизм корабля?
«Усилие управления» для поворота срабатывает от штурвала на штурвале, которое достигает системы рулевого управления. Система рулевого управления создает крутящее усилие в определенном масштабе, которое затем, в свою очередь, передается на рулевой механизм, вращающий рулевое колесо.
Что такое аварийное рулевое управление?
Аварийная система рулевого управления, как следует из названия, представляет собой систему, которая используется при выходе из строя главной системы рулевого управления корабля.
Может возникнуть ситуация, при которой дистанционное управление может не работать, и это может быть внезапная потеря управления с мостика. Это может быть связано с внезапным сбоем питания, любой электрической неисправностью в системе или системе управления, которая включает в себя неисправный телемотор или серводвигатель, который используется для передачи сигнала с мостика на блок рулевого управления.
Система аварийного рулевого управления используется для управления рулевым управлением корабля в такой аварийной ситуации путем ручного измерения его внутри рубки рулевого управления.
Википедия
Часто задаваемые вопросы (FAQ)
Для чего нужен рулевой механизм?
Предназначен для поворота корабля с левого борта на правый и наоборот. Его назначение в машине крутить руль.
Каковы 3 основные части системы рулевого управления?
Основными частями являются трансмиссия, блок питания и блок управления.
Какие существуют 2 типа систем рулевого управления?
1. Гидравлический и 2. Электрогидравлический
Что такое рулевой цилиндр?
Рулевой цилиндр, также известный как цилиндр рулевого управления, является наиболее важной частью гидравлической системы рулевого управления. Чтобы обеспечить правильную и точную работу, выберите подходящий гидроцилиндр рулевого управления для вашего применения.

Что такое система рулевого управления с исправлением и без него?
Продолжение : – Это стандартный метод рулевого управления, который включает обратную связь с штурвалом по углу поворота рулевого колеса. Это может осуществляться вручную или автоматически.
Курс корабля можно запрограммировать в автопилоте, который затем может сравнить его с желаемым курсом и соответствующим образом отрегулировать угол руля.Non Follow Up — обычно используется только для целей резервного копирования. Каждый блок рулевого управления имеет один рычаг; при перемещении рычага в одну сторону руль начинает поворачиваться; руль продолжает поворачиваться до тех пор, пока рычаг не будет отпущен или он не достигнет предела своего действия.
Как называют того, кто управляет кораблем?
Рулевой или рулевой — это человек, который управляет кораблем, парусной лодкой, подводной лодкой, морским судном или космическим кораблем другого типа.