Как работает двигатель автомобиля – устройство, принцип действия + видео » АвтоНоватор
Статья опубликована 26.06.2014 06:34 Последняя правка произведена 21.07.2015 08:36 Бензиновые двигатели
– одна из разновидностей ДВС (двигателей внутреннего сгорания) в которых поджег смеси из воздуха и топлива, осуществляется в цилиндрах, посредством искр от свечей зажигания. Роль регулятора мощности выполняет дроссельная заслонка, которая регулирует поток поступающего воздуха.
Существует несколько видов дросселей, например карбюраторная дроссельная заслонка, регулирует количество поступающего в цилиндры ДВС топлива. Она состоит из пластины, закрепленной на главной вращающейся оси и помещенной в трубке, по которой и протекает топливо. Вращая пластинку, можно регулировать пропускную способность трубки (если пластинка находится в перпендикулярном положении относительно трубки, то топливо поступать не будет). Дроссель управляется водителем, наиболее распространена двойная система привода: ножная от педали и ручная от рычага или кнопки. При использовании педали, кнопка ручного управления блокируется, а при вытягивании кнопки ручного управления опускается педаль. В дальнейшем, дроссель опять открывается педалью, но при опускании педали, он остается в положении, установленным ручным управлением.
При использовании педали, кнопка ручного управления блокируется, а при вытягивании кнопки ручного управления опускается педаль. В дальнейшем, дроссель опять открывается педалью, но при опускании педали, он остается в положении, установленным ручным управлением.
Классификация бензиновых двигателей:
По кол-ву цилиндров
– одноцилиндровые, двухцилиндровые, многоцилиндровые;
По системе охлаждения
– двигатели с жидкостной и воздушной СО.
По типу смазки
– смешанные (топливная смесь перемешивается с маслом), раздельный тип (масло заливается в картер).
По виду применяемого топлива:
бензиновые или многотопливные.
По степени сжатия.
Подразделяют двигатели высокого (E=12…18) и низкого (E=4…9) сжатия.
По способу смесеобразования
— подразделяют на двигатели с внешним смесеобразованием, топливная смесь готовится вне цилиндров двигателя (газовые и карбюраторные), и двигатели с внутренним смесеобразованием (инжекторные – рабочая смесь образуется внутри цилиндров).
По размещению цилиндров
– V-образные, у которых цилиндры располагаются под углом (если угол составляет 180 градусов, то двигатель является оппозитным [с противолежащими цилиндрами]). В «рядных» двигателях цилиндры располагаются вертикально или горизонтально в один ряд.
По способу осуществления рабочего цикла
– двухтактные и четырехтактные.
Двухтактные двигатели
обладают большей мощностью на единицу объема, однако проигрывают в КПД. Поэтому они нашли свое применение там, где важна компактность, а не экономичность (мотоциклы, моторные лодки, бензопилы и другие моторизованные инструменты).
Четырехтактные двигатели
доминируют в остальных средствах передвижения. Интересен тот факт, что двухтактные дизельные двигатели лишены многих недостатков двухтактных бензиновых двигателей, однако применяются в основном на больших судах (иногда на тепловозах и грузовиках).
По частоте вращения:
малооборотистые, повышенной частоты вращения, высокооборотистые.
По предназначению:
стационарные, судовые, автотракторные, авиационные, тепловозные и др.
По способу подачи топлива:
существуют атмосферные двигатели, в которых поступление топлива осуществляется за счет разницы атмосферного давления и давления внутри двигателя, при всасывающем ходе поршня; в двигателях с наддувом горючая смесь подается в цилиндр под давлением, которое поддерживается турбокомпрессором, для увеличения мощности двигателя.
Принцип работы многоцилиндровых двигателей
На автомобилях устанавливают многоцилиндровые двигатели. Чтобы многоцилиндровый двигатель работал равномерно, такты расширения должны следовать через равные углы поворота коленчатого вала (т. е. через равные промежутки времени).
Последовательность чередования одноименных тактов в цилиндрах называют порядком работы двигателя. Порядок работы большинства четырехцилиндровых двигателей 1-3-4-2 или 1-2-4-3. Это означает, что после рабочего хода в первом цилиндре следующий рабочий ход происходит в третьем, затем в четвертом и, наконец, во втором цилиндре. Определенная последовательность соблюдается и в других многоцилиндровых двигателях.
Определенная последовательность соблюдается и в других многоцилиндровых двигателях.
Источник
Рабочий цикл четырехтактного двигателя состоит из четырех основных этапов – тактов:
1. Впуск.
На этом такте происходит перемещение поршня из верхней мертвой точки (ВМТ) в нижнюю (НМТ). Кулачки распределительного вала открывают впускной клапан, через который в цилиндр всасывается новая горючая смесь.
2. Сжатие.
Поршень переходит в прежнее состояние (из НМТ в ВМТ), сжимая при этом рабочую смесь. Согласно термодинамике, температура рабочей смеси увеличивается. Степенью сжатия называется отношение рабочего объема цилиндра в НМТ к объему камеры сгорания в ВМТ. Это очень важный параметр, на практике, чем он больше, тем экономичнее двигатель. Однако и тут есть противоречия, для двигателей с высокой степенью сжатия требуется особенное топливо, с более высоким октановым числом, которое стоит дороже.
3. Сгорание и расширение (рабочий ход поршня).
Перед завершением цикла сжатия смесь топлива и воздуха поджигается искрой от свечи зажигания. Топливо сгорает во время движения поршня из ВМТ в НМТ, образуется газ, который расширяется, толкая поршень. Углом опережения зажигания называется степень «недоворота» коленвала двигателя до ВМТ при поджигании смеси. Необходимость преждевременного зажигания обосновывается тем, что процесс воспламенения горючей смеси медленный относительно скорости работы поршневых систем двигателя. Только в том случае, когда основная масса топлива успеет воспламениться, польза от использования энергии сгоревшего топлива будет максимальной. Процесс сгорания топлива занимает фиксированное время, поэтому, при повышении оборотов двигателя, необходимо увеличивать угол опережения зажигания, для повышения эффективности работы двигателя. Раньше, в старых автомобилях, использовалось механическое устройство (центробежный и вакуумный регулятор, который воздействовал на прерыватель). Сейчас в автомобилях установлена электроника, которая отвечает за определение угла опережения зажигания, работающая по емкостному принципу.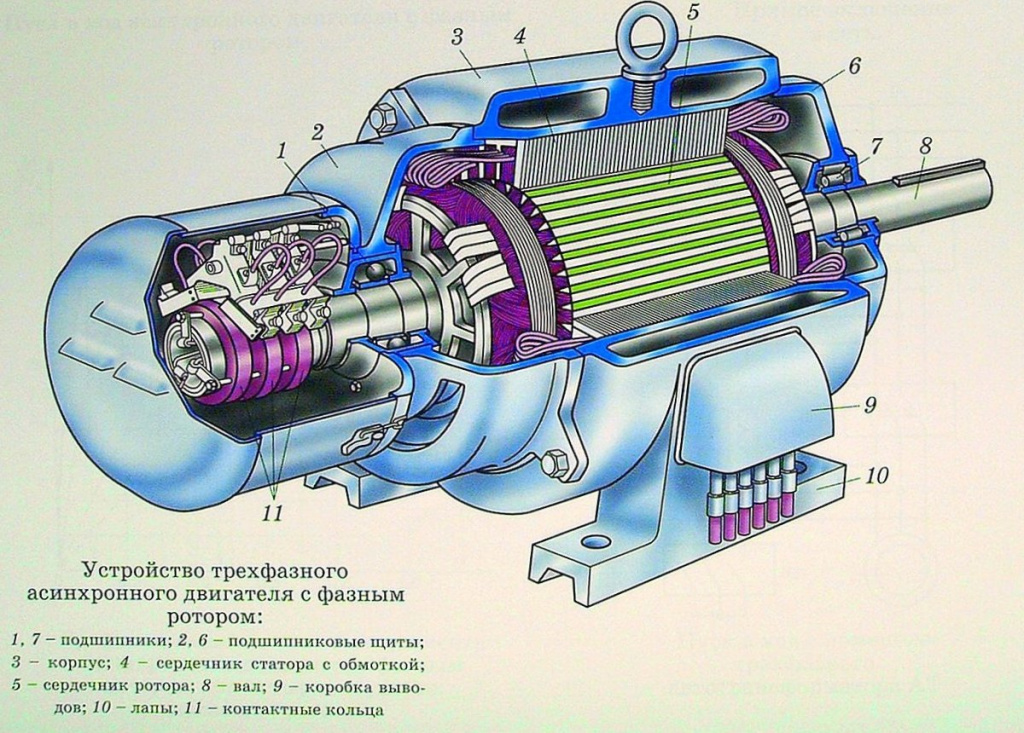
4. Выпуск.
В последнем такте происходит вытеснение отработанных газов из цилиндра через выпускной клапан. Поршень перемещается из нижней мертвой точки в верхнюю, при достижении которой цикл начинается сначала. При этом совсем не необходимо, чтобы начало нового цикла совпадало с окончанием предыдущего. Положение, в котором открыты сразу два клапана: впускной и выпускной, называется перекрытием клапанов. Перекрытие клапанов способствует лучшему наполнению цилиндров топливом, а также более качественной очистки цилиндров от продуктов сгорания.
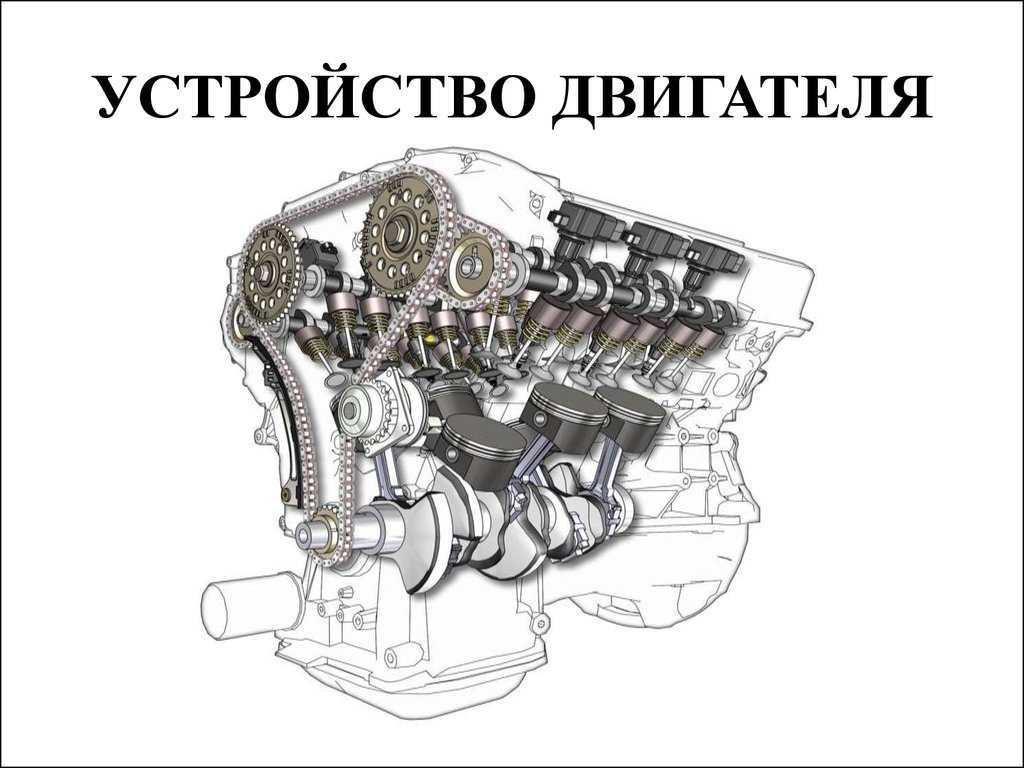
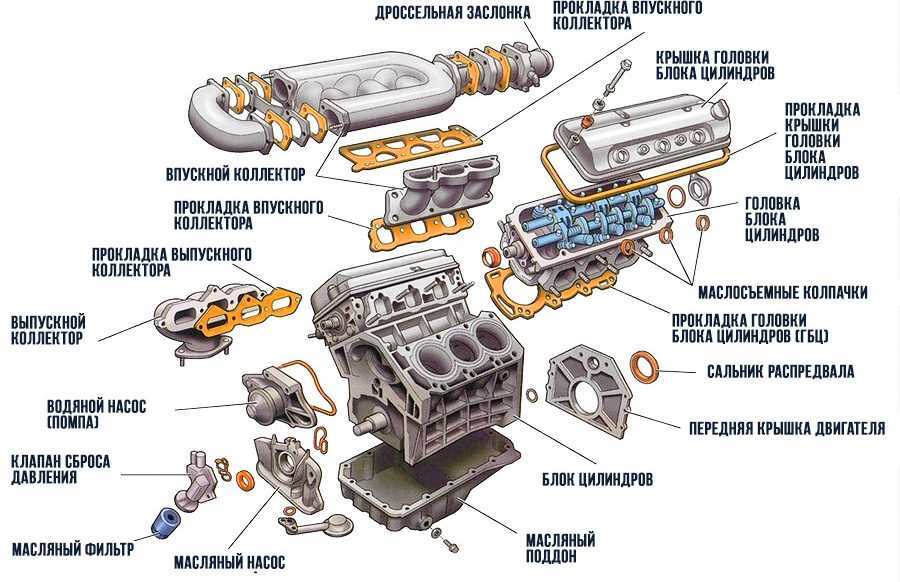
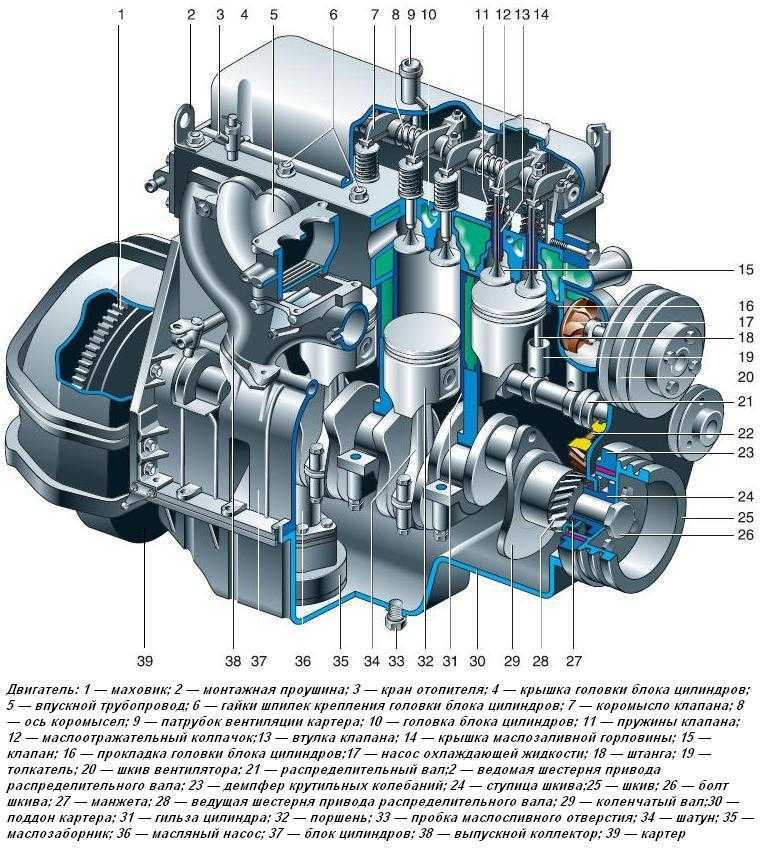
Как устроен двигатель автомобиля – изучаем схему устройства
Классическое устройство двигателя включает в себя цилиндр и картер, закрытый в нижней части поддоном. Внутри цилиндра находится поршень с различными кольцами, который перемещается в определенной последовательности. Он имеет форму стакана, в его верхней части располагается днище. Чтобы окончательно понять, как устроен двигатель автомобиля, необходимо знать, что поршень с помощью поршневого пальца и шатуна связывается с коленчатым валом.
Для плавного и мягкого вращения используются коренные и шатунные вкладыши, играющие роль подшипников. В состав коленчатого вала входят щеки, а также коренные и шатунные шейки. Все эти детали, собранные вместе, называются кривошипно-шатунным механизмом, который преобразует возвратно-поступательное перемещение поршня в круговое вращение коленчатого вала.
Верхняя часть цилиндра закрывается головкой, где расположены впускной и выпускной клапаны. Они открываются и закрываются в соответствии с перемещением поршня и движением коленчатого вала. Чтобы точно представить, как работает двигатель автомобиля, видео в нашей библиотеке следует изучить также подробно, как и статью. А пока мы попытаемся выразить его действие на словах.
Двухтактный двигатель.
Двухтактный и четырехтактный цикл схожи лишь тем, что в них присутствует сжатие и расширение рабочего тела. Такты наполнения топливом двигателя и его последующей очистки от продуктов сгорания заменены продувкой двигателя вблизи НМТ положения поршня. А весь рабочий цикл укладывается в течение одного оборота коленвала.
А весь рабочий цикл укладывается в течение одного оборота коленвала.
Если говорить о двухтактном цикле, то он делится на следующие такты: изначально, поршень поднимается вверх, сжимая рабочую смесь в цилиндре, а также создавая разрежение в кривошипной камере. Клапан впускного коллектора открывается от воздействия этого разряжения, и новая порция горючей смеси (зачастую с добавлением масла) втягивается в кривошипную камеру. При опускании поршня вниз закрывается клапан в кривошипной камере, а также повышается давление. В остальном же: поджег, сгорание топлива, и расширение рабочего тела происходят идентично, как и в четырехтактных двигателях. Но есть один нюанс, в момент, когда поршень опускается, примерно за 60° до НМТ открывается выпускное окно (поршень перестает его перекрывать). Выхлопные газы, находящиеся под большим давлением, устремляются в выпускной коллектор через это окно. Немного позже, поршень открывает и впускное окно, которое расположено со стороны впускного коллектора. Новая порция топлива из кривошипной камеры, попадает в рабочий объем цилиндра, под воздействием опускающегося поршня, и вытесняет оставшиеся отработанные газы. При этом, небольшая часть рабочей смеси попадает в выпускной коллектор, однако на обратном ходе поршня она втягивается обратно в кривошипную камеру.
Новая порция топлива из кривошипной камеры, попадает в рабочий объем цилиндра, под воздействием опускающегося поршня, и вытесняет оставшиеся отработанные газы. При этом, небольшая часть рабочей смеси попадает в выпускной коллектор, однако на обратном ходе поршня она втягивается обратно в кривошипную камеру.
Принцип работы ДВС
Крайние положения поршня, при которых он наиболее удален от оси коленчатого вала или приближен к ней, называются верхней и нижней «мертвыми» точками (ВМТ и НМТ). Подробнее в статье «как устроены бензиновые и дизельные двигатели».
Впуск. По мере того, как коленчатый вал двигателя делает первый полуоборот, поршень перемещается от ВМТ к НМТ, впускной клапан открыт, выпускной клапан закрыт. В цилиндре создается разряжение, вследствие чего свежий заряд горючей смеси, состоящий из паров бензина и воздуха, засасывается через впускной газопровод в цилиндр и, смешиваясь с остаточными отработавшими газами, образует рабочую смесь.
Сжатие. После заполнения цилиндра горючей смесью при дальнейшем вращении коленчатого вала (второй полуоборот) поршень перемещается от НМТ к ВМТ при закрытых клапанах.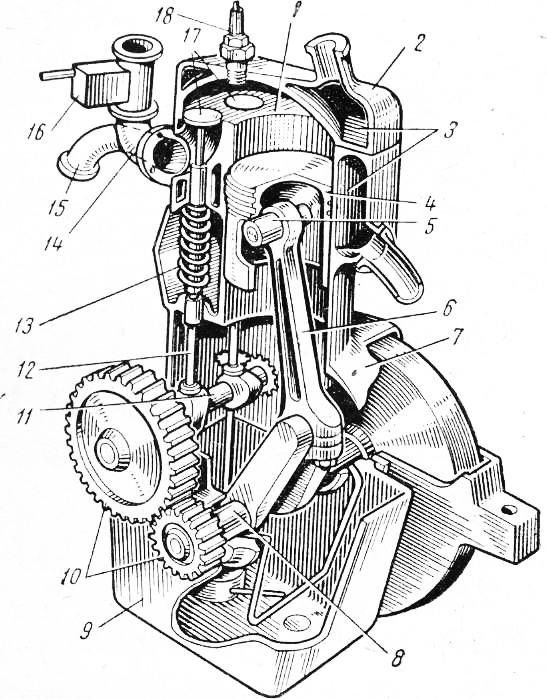 По мере уменьшения объема температура и давление рабочей смеси повышаются.
По мере уменьшения объема температура и давление рабочей смеси повышаются.
Расширение или рабочий ход. В конце такта сжатия рабочая смесь воспламеняется от электрической искры и быстро сгорает, вследствие чего температура и давление образующихся газов резко возрастает, поршень при этом перемещается от ВМТ к НМТ. В процессе такта расширения шарнирно связанный с поршнем шатун совершает сложное движение и через кривошип приводит во вращение коленчатый вал.
Как происходит рабочий цикл четырехтактных и двухтактных агрегатов?
Полный рабочий цикл проходит за четыре такта:
- Впуск;
- Сжатие;
- Рабочий ход;
- Выпуск.
Рабочий цикл двухтактного двигателя происходит за один оборот коленчатого вала и включает в себя только два такта: сжатие и рабочий ход. Благодаря этому, бензиновый двигатель получает в 1,5 раза большую мощность при таком же объеме.
Основные преимущества 4-тактных агрегатов: большой ресурс; экономичность; меньший шум и выброс вредных веществ; отсутствие потребности добавления масла в топливо. Масло для бензиновых двигателей подбирается по классификациям в зависимости от его износа.
Масло для бензиновых двигателей подбирается по классификациям в зависимости от его износа.
Отличия карбюраторных моторов от инжекторных
Инжекторный мотор
Работа карбюраторного мотора зависит от точного смешивания топлива подаваемого в карбюратор с воздухом.
Устройство инжекторного двигателя значительно отличается. Его работа зависит напрямую от форсунок, подающих топливо под давлением. За правильную дозировку отвечает электронный блок управления.
Массовое производство инжекторов для бензинового мотора, началось после повышения норм по выбросу вредных веществ. Благодаря точному впрыску топлива, за который отвечает программа ЭБУ, получилось достичь постоянства выхлопных газов. А стабильная работа двигателя с помощью катализатора помогла значительно уменьшить его шум.
Устройство системы зажигания бензинового мотора бывает бесконтактным, микропроцессорным или контактным. Бензиновый двигатель с контактной системой включает в себя:
- Прерыватель-распределитель;
- Катушку;
- Выключатель зажигания;
- Свечи.

Катушка зажигания
Работа бензинового агрегата с бесконтактной системой, зависит от того же оборудования, за исключением индукционного датчика, используемого вместо прерывателя. Устройство микропроцессорной системы зажигания оборудовано: датчиком положения коленчатого вала, блоком управления, коммутатором, катушками, свечами, датчиком температуры бензинового мотора. Стабильная работа инжекторного агрегата была достигнута при помощи добавленного датчика положения заслонки и датчика расхода воздуха.
Характеристики карбюраторных и инжекторных устройств
- Устройства с карбюраторами Карбюраторные двигатели были сконструированы раньше и сегодня весьма распространены. Они довольно просты в использовании и неприхотливы в ремонте, менее чувствительны к условиям эксплуатации, позволяют без особых хлопот производить регулировку соотношения компонентов топливной смеси. Эти достоинства во многих случаях полностью компенсируют негативный фактор излишне больших топливных затрат.
 Карбюратор – специфический узел двигателя, ключевой функцией которого является смешивание топлива с воздухом для образования однородной горючей смеси. Получение гомогенной смеси осуществляется посредством разбрызгивания топливной жидкости в воздушной струе, регулируемой дросселем – заслонкой. Таким образом, в камеру сгорания поставляется уже полностью однородная смесь.
Карбюратор – специфический узел двигателя, ключевой функцией которого является смешивание топлива с воздухом для образования однородной горючей смеси. Получение гомогенной смеси осуществляется посредством разбрызгивания топливной жидкости в воздушной струе, регулируемой дросселем – заслонкой. Таким образом, в камеру сгорания поставляется уже полностью однородная смесь. - Устройства с инжекторами Технологически более современный и совершенный по ряду критериев вид бензиновых двигателей представляют собой двигатели с инжекторным устройством. Система впрыска топлива посредством использования инжектора через форсунки с регулировкой при помощи электроники, производит открытие последних под воздействием импульса тока. При управлении системой впрыска электронным блоком достигается полная однородность выхлопных газов, которые перенаправляются в катализатор – устройство для нейтрализации выхлопных газов. Благодаря особенностям работы катализаторов инжекторные двигатели выбрасывают менее вредные выхлопные газы.
 Элементом катализатора, анализирующим состав выхлопных газов и сохраняющим пропорции кислорода с оксидами азота и остатками углеводородов, не до конца окисленными в процессе горения, является кислородный датчик. Инжекторные двигатели в техническом отношении сконструированы значительно сложнее, поэтому требуют особых условий эксплуатации и профилактики, но при этом обеспечивают более экономически целесообразное расходование топлива и повышение общей экологической стабильности окружающей среды. Сравнение 2 -тактных и 4 –тактных разновидностей двигателей.
Элементом катализатора, анализирующим состав выхлопных газов и сохраняющим пропорции кислорода с оксидами азота и остатками углеводородов, не до конца окисленными в процессе горения, является кислородный датчик. Инжекторные двигатели в техническом отношении сконструированы значительно сложнее, поэтому требуют особых условий эксплуатации и профилактики, но при этом обеспечивают более экономически целесообразное расходование топлива и повышение общей экологической стабильности окружающей среды. Сравнение 2 -тактных и 4 –тактных разновидностей двигателей. - С двухтактным принципом работы В ряде случаев, могут значительно выигрывать по некоторым параметрам, как то: обладание меньшим весом конструкции, функционирование без технически сложных систем смазки и газораспределения, относительная простота в эксплуатации и ремонте, существенно больший показатель мощности, высокая скорость разгона эксплуатируемого средства, а также его дешевизна и доступность. К минусам данного типа двигателей относится чрезмерный расход топлива и необходимость наличия системы принудительного продувания.
 С учетом рассмотренных особенностей, данные характеристики двухтактных двигателей значительно сужают область их применения до установки не большую технику (в основном, некоторая сельскохозяйственная техника, мотоциклы и т.п.).
С учетом рассмотренных особенностей, данные характеристики двухтактных двигателей значительно сужают область их применения до установки не большую технику (в основном, некоторая сельскохозяйственная техника, мотоциклы и т.п.). - С четырехтактным принципом работы Значительно более превалируют по степени распространенности за счет качественно других характеристик, таких как относительная чистота выхлопных газов и простота выхлопной системы, приемлемый показатель уровня шума, оправданный с финансовой точки зрения расход топлива и отсутствие необходимости примешивания к топливу масляного вещества, а также наличию системы газораспределения.
Благодаря перечисленным свойствам четырехтактные двигатели повсеместно устанавливаются на самый широкий спектр транспортных средств от морских судов до авиалайнеров, и, в целом, так или иначе используются практически во всех отраслях промышленности и машиностроения.
Did you find apk for android? You can find new Free Android Games and apps.
Как это работает. Ракетный двигатель
Фото: Объединенная двигателестроительная корпорация
Полеты в космос, одно из самых вдохновляющих достижений человечества, невозможны без ракетного двигателя. С одной стороны, принцип его работы максимально прост, а с другой – всего несколько стран могут похвастаться ракетными двигателями собственного производства.
С момента старта Гагарина и по сей день все российские космонавты поднимаются с поверхности Земли двигателями РД-107/108. Серийное производство этих исключительно надежных двигателей продолжается на самарском предприятии Ростеха «ОДК-Кузнецов». Рассказываем о том, как устроен и работает космический двигатель-долгожитель РД-107/108.
Космически просто
И правда, объяснить принцип действия реактивных двигателей, к которым относятся и ракетные двигатели, можно даже ребенку.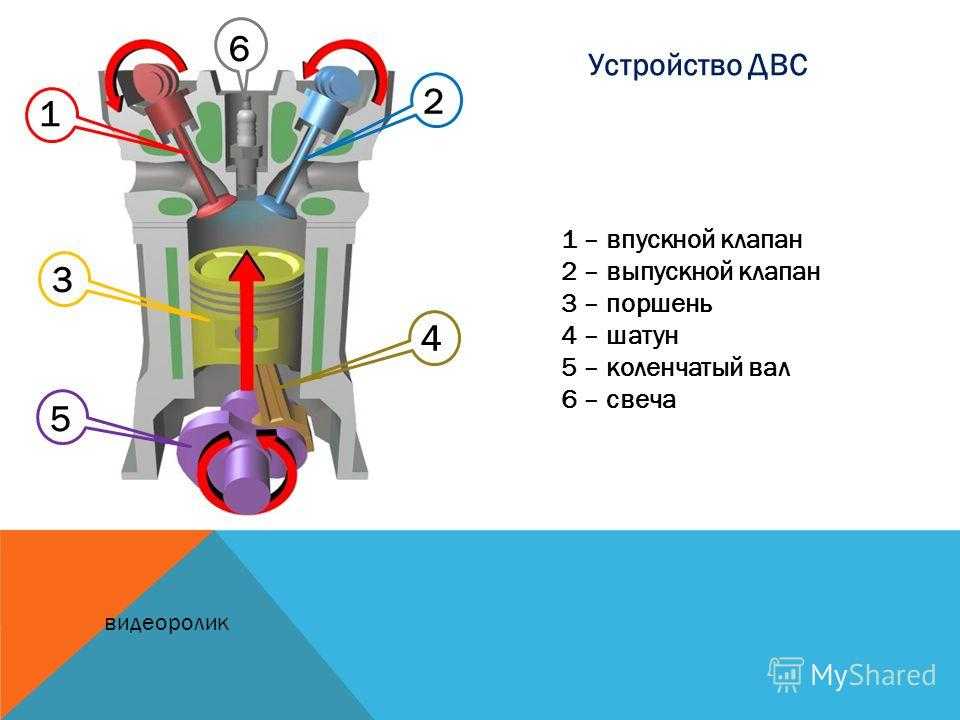
Фото: Космический центр «Восточный» / Роскосмос
Самым распространенным типом двигателей для космических программ сегодня являются жидкостные ракетные двигатели (ЖРД), в которых в качестве топлива используются жидкие горючее и окислитель. К этому типу относится и российский РД-107/108.
Жидкостные двигатели – на сегодняшний момент самые мощные и универсальные ракетные двигатели, с помощью которых совершается большинство полетов в космос.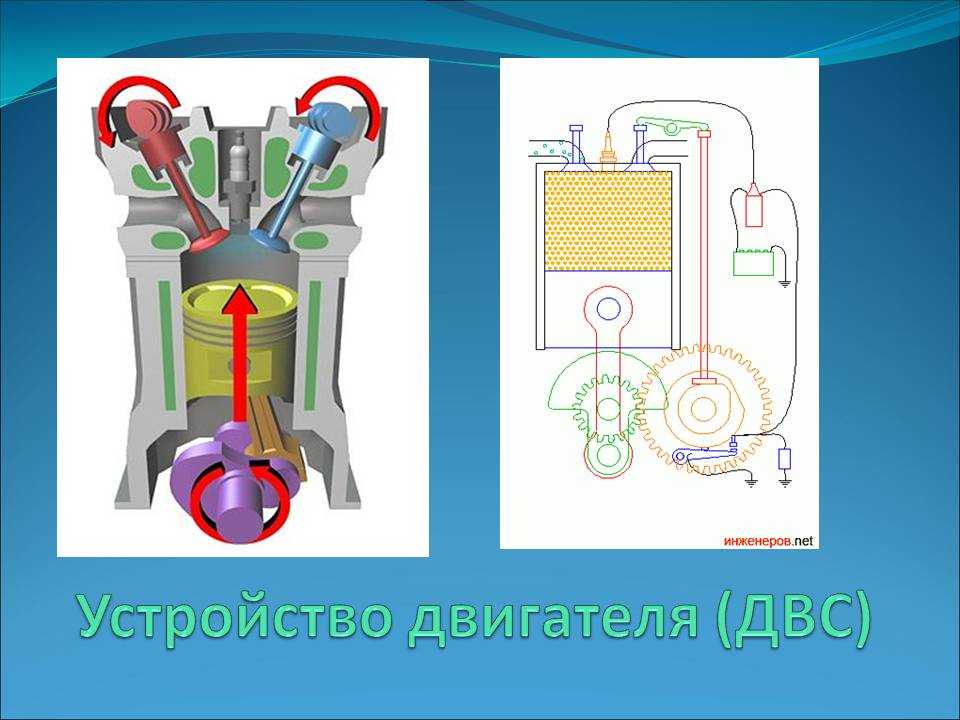 Они отличаются высоким удельным импульсом, то есть при меньшей массе израсходованного топлива создают большую тягу. Кроме того, ЖРД позволяют активно управлять уровнем тяги и могут использоваться много раз. При этом по сравнению с другими видами ракетных двигателей, например твердотопливными, они значительно сложнее и дороже, поэтому основная их сфера применения – космонавтика и обеспечение выведения орбитальных и межпланетных аппаратов.
Они отличаются высоким удельным импульсом, то есть при меньшей массе израсходованного топлива создают большую тягу. Кроме того, ЖРД позволяют активно управлять уровнем тяги и могут использоваться много раз. При этом по сравнению с другими видами ракетных двигателей, например твердотопливными, они значительно сложнее и дороже, поэтому основная их сфера применения – космонавтика и обеспечение выведения орбитальных и межпланетных аппаратов.
Как работает жидкостный ракетный двигатель
Чтобы получить полезное действие, достаточное для прорыва в космос, нужно получить большое количество энергии − эффективно сжечь большое количество топлива. Как известно, любой процесс горения представляет собой химическую реакцию окисления. И если на Земле для других видов тепловых двигателей в качестве окислителя можно использовать атмосферный кислород, то для ракетного двигателя, и тем более в космосе, окислитель и горючее надо иметь непосредственно на ракете, и лучше всего в максимально плотном и удобном для подачи жидком виде.
Фото: Объединенная двигателестроительная корпорация
В камере сгорания подаваемые специальными насосами в нужном количестве и с необходимым давлением окислитель и горючее смешиваются и сгорают. Горячие (с температурой в несколько тысяч градусов) продукты сгорания в конструкции особого профиля – сверхзвуковом сопле Лаваля – разгоняются до многократно сверхзвуковых скоростей и уходят в пространство. Если умножить сумму секундных расходов масс горючего и окислителя на скорость выхода продуктов сгорания из сопла, можно в первом приближении получить силу тяги двигателя. Так, в общих чертах, можно описать схему работы жидкостного ракетного двигателя.
Устройство РД-107/108
Двигатель РД-107/108 состоит из четырех камер сгорания, турбонасосного агрегата, газогенератора, испарителя азота для наддува баков ракеты и комплекта агрегатов автоматики.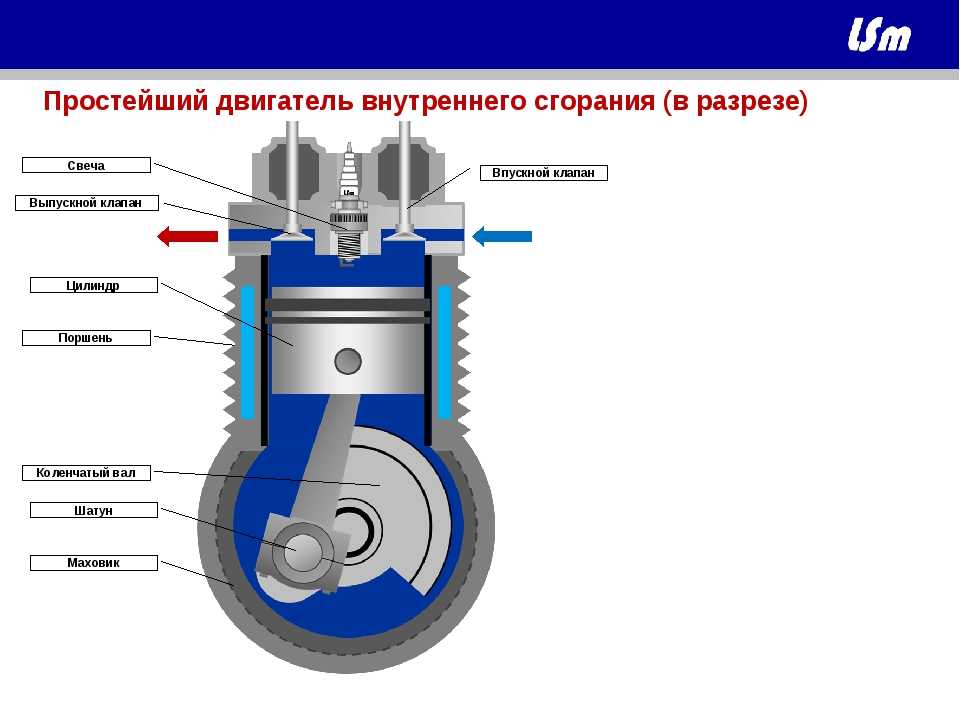 Для управления полетом ракеты на двигателях имеются рулевые камеры: два на РД-107 и четыре на РД-108.
Для управления полетом ракеты на двигателях имеются рулевые камеры: два на РД-107 и четыре на РД-108.
Несоизмеримые с возможностями существующих металлов температуры горения и продуктов сгорания, большое количество выделяемого тепла требуют охлаждения стенок камеры сгорания и сопла. В РД-107/108 эта инженерная задача решается двухстеночной конструкцией камеры сгорания и сопла и организацией охлаждения стенки со стороны горячего тракта подачей горючего (керосина) в камеру сгорания через межстеночные пространства.
Вторая особенность РД-107/108 − открытая схема сброса генераторного газа. Окислитель и горючее хранятся в отдельных баках и подаются в систему с помощью турбонасосного агрегата (ТНА). Для привода насосов горючего и окислителя используется турбина, в качестве рабочего тела для которой используется парогаз – продукт каталитического разложения пероксида водорода. Выхлопы турбины выбрасываются за срез сопла.
Рекордсмен космоса
Разработка двигателей РД-107 и РД-108 проходила в 1954–1957 годах под руководством выдающегося конструктора Валентина Глушко. Двигатели предназначались для первой в мире межконтинентальной баллистической ракеты Р-7, модификация которой в 1957 году доставила в космос первый искусственный спутник Земли. В 1961 году двигатели обеспечили первый полет человека в космос. На протяжении более 60 лет российские ракеты «Союз» поднимаются в небо с помощью двигателей РД-107/108 и их модификаций. Серийное производство двигателей налажено на самарском заводе «ОДК-Кузнецов», входящем в Объединенную двигателестроительную корпорацию Ростеха.
Программа РД-107/108 продолжает развиваться, создаются новые модификации – всего разработано 18 вариантов для различных программ. Сегодня модификациями двигательных установок РД-107А/РД-108А оснащаются I и II ступени всех ракет-носителей среднего класса типа «Союз». Все пилотируемые и до 80% грузовых космических кораблей в России взлетают благодаря этим двигателям.
Все пилотируемые и до 80% грузовых космических кораблей в России взлетают благодаря этим двигателям.
РД-107/108 уже поставил свой космический рекорд по долголетию. Конечно, когда-нибудь и его время пройдет, но сегодня запас для совершенствования двигателя еще не исчерпан.
устройство, принцип работы, типы, схемы подключения
Для работы практически всех электрических приборов, необходимы специальные приводные механизмы. Предлагаем рассмотреть, что такое шаговый двигатель, его конструкцию, принцип работы и схемы подключения.
Что такое шаговый двигатель?
Шаговый двигатель представляет собой электрическую машину, предназначенную для преобразования электрической энергии сети в механическую энергию. Конструктивно состоит из обмоток статора и магнитомягкого или магнитотвердого ротора. Отличительной особенностью шагового двигателя является дискретное вращение, при котором заданному числу импульсов соответствует определенное число совершаемых шагов. Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
Наибольшее применение такие устройства получили в станках с ЧПУ, робототехнике, устройствах хранения и считывания информации.
В отличии от других типов машин шаговый двигатель совершает вращение не непрерывно, а шагами, от чего и происходит название устройства. Каждый такой шаг составляет лишь часть от его полного оборота. Количество необходимых шагов для полного вращения вала будет отличаться, в зависимости от схемы соединения, марки двигателя и способа управления.
Преимущества и недостатки шагового электродвигателя
К преимуществам эксплуатации шагового двигателя можно отнести:
- В шаговых электродвигателях угол поворота соответствует числу поданных электрических сигналов, при этом, после остановки вращения сохраняется полный момент и фиксация;
- Точное позиционирование – обеспечивает 3 – 5% от установленного шага, которая не накапливается от шага к шагу;
- Обеспечивает высокую скорость старта, реверса, остановки;
- Отличается высокой надежностью за счет отсутствия трущихся компонентов для токосъема, в отличии от коллекторных двигателей;
- Для позиционирования шаговому двигателю не требуется обратной связи;
- Может выдавать низкие обороты для непосредственно подведенной нагрузки без каких-либо редукторов;
- Сравнительно меньшая стоимость относительно тех же сервоприводов;
- Обеспечивается широкий диапазон управления скоростью оборотов вала за счет изменения частоты электрических импульсов.

К недостаткам применения шагового двигателя относятся:
- Может возникать резонансный эффект и проскальзывание шагового агрегата;
- Существует вероятность утраты контроля из-за отсутствия обратной связи;
- Количество расходуемой электроэнергии не зависит от наличия или отсутствия нагрузки;
- Сложности управления из-за особенности схемы
Устройство и принцип работы
Рис. 1. Принцип действия шагового двигателяНа рисунке 1 изображены 4 обмотки, которые относятся к статору двигателя, а их расположение устроено так, что они находятся под углом 90º относительно друг друга. Из чего следует, что такая машина характеризуется размером шага в 90º.
В момент подачи напряжения U1 в первую обмотку происходит перемещение ротора на те же 90º. В случае поочередной подачи напряжения U2, U3, U4 в соответствующие обмотки, вал продолжит вращение до завершения полного круга. После чего цикл повторяется снова. Для изменения направления вращения достаточно изменить очередность подачи импульсов в соответствующие обмотки.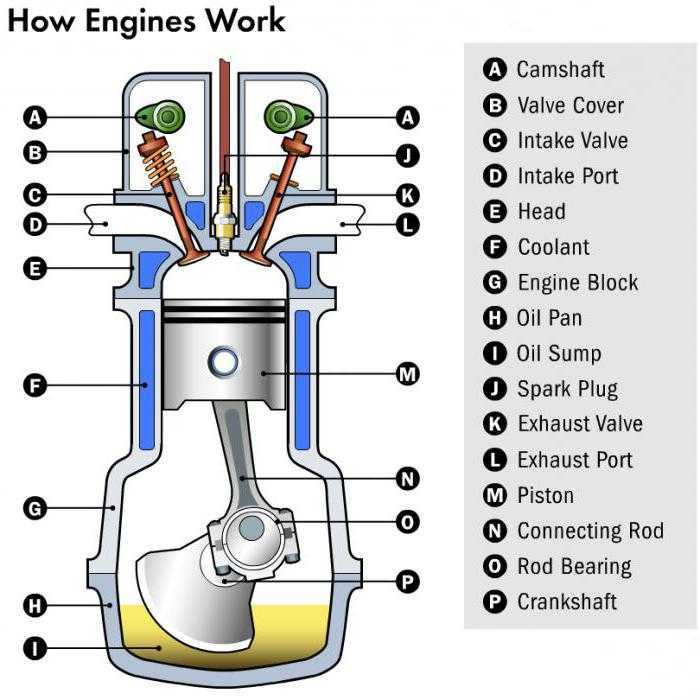
Типы шаговых двигателей
Для обеспечения различных параметров работы важна как величина шага, на который будет смещаться вал, так и момент, прилагаемый для перемещения. Вариации данных параметров достигаются за счет конструкции самого ротора, способа подключения и конструкции обмоток.
По конструкции ротора
Вращаемый элемент обеспечивает магнитное взаимодействие с электромагнитным полем статора. Поэтому его конструкция и технические особенности напрямую определяют режим работы и параметры вращения шагового агрегата. Чтобы на практике определить тип шагового мотора, при обесточенной сети необходимо провернуть вал, если ощущаете сопротивление, то это свидетельствует о наличии магнита, в противном случае, это конструкция без магнитного сопротивления.
Реактивный
Реактивный шаговый двигатель не оснащается магнитом на роторе, а выполняется из магнитомягких сплавов, как правило, его набирают из пластин для уменьшения потерь на индукцию. Конструкция в поперечном разрезе напоминает шестерню с зубцами. Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Полюса статорных обмоток запитываются противоположными парами и создают магнитную силу для перемещения ротора, который двигается от попеременного протекания электрического тока в обмоточных парах.
Весомым плюсом такой конструкции шагового привода является отсутствие стопорящего момента, образуемого полем по отношению к арматуре. По факту это тот же синхронный двигатель, в котором поворот ротора идет в соответствии с полем статора. Недостатком является снижение величины вращающего момента. Шаг для реактивного двигателя колеблется от 5 до 15°.
С постоянными магнитами
В этом случае подвижный элемент шагового двигателя собирается из постоянного магнита, в котором может быть два и большее количеством полюсов. Вращение ротора обеспечивается притяжением или отталкиванием магнитных полюсов электрическим полем при подаче напряжения в соответствующие обмотки. Для этой конструкции угловой шаг составляет 45-90°.
С постоянным магнитомГибридные
Был разработан с целью объединения лучших качеств двух предыдущих моделей, за счет чего агрегат обладает меньшим углом и шагом. Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Его ротор выполнен в виде цилиндрического постоянного магнита, который намагничен по продольной оси. Конструктивно это выглядит как два круглых полюса, на поверхности которых расположены зубцы ротора из магнитомягкого материала. Такое решение позволило обеспечить отличный удерживающий и крутящий момент.
Преимущества гибридного шагового двигателя заключатся в его высокой точности, плавности и скорости перемещения, малым шагом – от 0,9 до 5°. Их применяют для высококлассных станков ЧПУ, компьютерных и офисных приборах и современной робототехнике. Единственным недостатком считается относительно высокая стоимость.
Для примера разберем вариант гибридных ШД на 200 шагов позиционирования вала. Соответственно каждый из цилиндров будет иметь по 50 зубцов, один из них является положительным полюсом, второй отрицательным. При этом каждый положительный зубец расположен напротив паза в отрицательном цилиндре и наоборот. Конструктивно это выглядит так:
Расположение пазов гибридникаИз-за чего на валу шагового двигателя получается 100 перемежающихся полюсов с отличной полярностью. Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
Статор также имеет зубцы, как показано на рисунке 6 ниже, кроме промежутков между его компонентами.
За счет такой конструкции можно достичь смещения того же южного полюса относительно статора в 50 различных позиций. За счет отличия положения в полупозиции между северным и южным полюсом достигается возможность перемещения в 100 позициях, а смещение фаз на четверть деления предоставляет возможность увеличить количество шагов за счет последовательного возбуждения еще вдвое, то есть до 200 шагов углового вала за 1 оборот.
Обратите внимание на рисунок 6, принцип работы такого шагового двигателя заключается в том, что при попарной подаче тока в противоположные обмотки происходит подтягивание разноименных полюсов ротора, расположенных за зубьями статора и отталкивание одноименных, идущих перед ними по ходу вращения.
По виду обмоток
На практике шаговый двигатель представляет собой многофазный мотор. Плавность работы в котором напрямую зависит от количества обмоток – чем их больше, тем плавне происходит вращение, но и выше стоимость.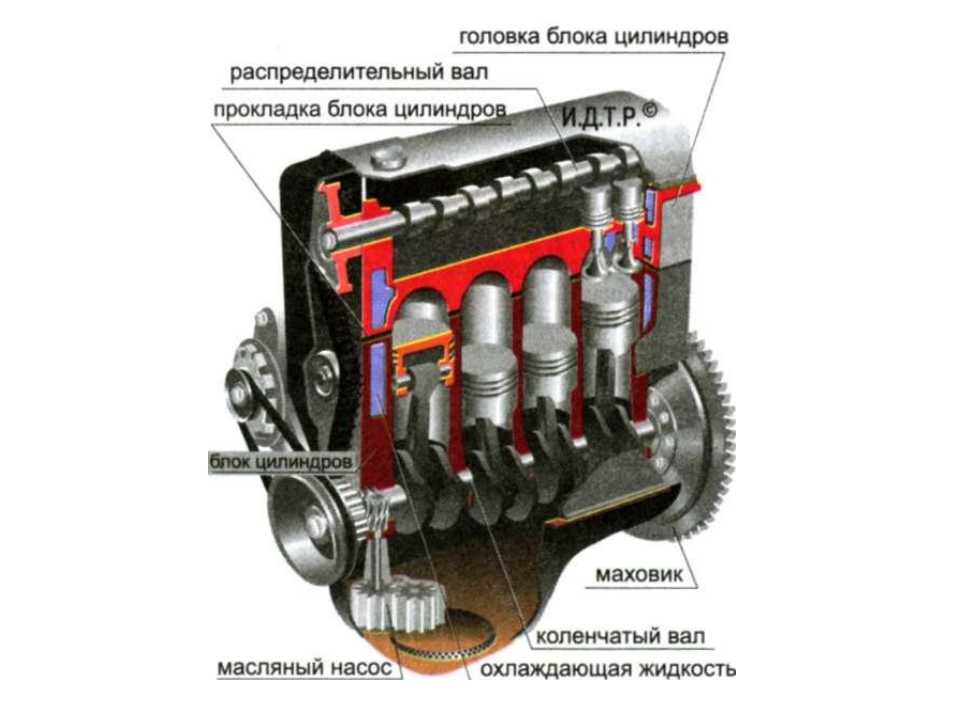 При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
При этом крутящий момент от числа фаз не увеличивается, хотя для нормальной работы их минимальное число на статоре электродвигателя должно составлять хотя бы две. Количество фаз не определяет числа обмоток, так двухфазный шаговый двигатель может иметь четыре и более обмотки.
Униполярный
Униполярный шаговый двигатель отличается тем, что в схеме подключения обмотки имеется ответвление от средней точки. Благодаря чему легко меняются магнитные полюса. Недостатком такой конструкции является использование только одной половины доступных витков, из-за чего достигается меньший вращающий момент. Поэтому они отличаются большими габаритами.
Униполярный ШДДля использования всей мощности катушки средний вывод оставляют не подключенным. Рассмотрите конструкции униполярных агрегатов, они могут содержать 5 и 6 выводов. Их количество будет зависеть от того, выводится срединный провод отдельно от каждой обмотки двигателя или они соединяются вместе.
Схема а) с различными, б) с одним выводомБиполярный
Биполярный шаговый двигатель подключается к контроллеру через 4 вывода. При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
При этом обмотки могут соединяться внутри как последовательно, так и параллельно. Рассмотрите пример его работы на рисунке.
В конструктивной схеме такого двигателя вы видите с одной обмоткой возбуждения в каждой фазе. Из-за этого смена направления тока требует использовать в электронной схеме специальные драйверы (электронные чипы, предназначенные для управления). Добиться подобного эффекта можно при помощи включения Н-моста. В сравнении с предыдущим, биполярное устройство обеспечивает тот же момент при гораздо меньших габаритах.
Подключение шагового двигателя
Чтобы запитать обмотки, потребуется устройство способное выдать управляющий импульс или серию импульсов в определенной последовательности. В качестве таких блоков выступают полупроводниковые приборы для подключения шагового двигателя, микропроцессорные драйвера. В которых имеется набор выходных клемм, каждая из них определяет способ питания и режим работы.
В зависимости от схемы подключения должны применяться те или другие выводы шагового агрегата.
При различных вариантах подведения тех или иных клемм к выходному сигналу постоянного тока получается определенная скорость вращения, шаг или микрошаг линейного перемещения в плоскости. Так как для одних задач нужна низкая частота, а для других высокая, один и тот же двигатель может задавать параметр за счет драйвера.
Типичные схемы подключения ШД
В зависимости того, какое количество выводов представлено на конкретном шаговом двигателе: 4, 6 или 8 выводов, будет отличаться и возможность использования той или иной схемы их подключения Посмотрите на рисунки, здесь показаны типичные варианты подключения шагового механизма:
При условии запитки основных полюсов шаговой машины от одного и того же драйвера, по данным схемам можно отметить следующие отличительные особенности работы:
- Выводы однозначно подводятся к соответствующим клеммам устройства. При последовательном соединении обмоток увеличивает индуктивность обмоток, но понижает ток.

- Обеспечивает паспортное значение электрических характеристик. При параллельной схеме увеличивается ток и снижается индуктивность.
- При подключении по одной фазе на обмотку снижется момент на низких оборотах и уменьшает величину токов.
- При подключении осуществляет все электрические и динамические характеристики согласно паспорта, номинальный токи. Значительно упрощается схема управления.
- Выдает куда больший момент и применяется для больших частот вращения;
- Как и предыдущая предназначена для увеличения момента, но применяется для низких частот вращения.
Управление шаговым двигателем
Выполнение операций шаговым агрегатом может осуществляться несколькими методами. Каждый из которых отличается способом подачи сигналов на пары полюсов. Всего выделяют тир метода активации обмоток.
Волновой – в таком режиме происходит возбуждение только одной обмотке, к которой и притягиваются роторные полюса. При этом шаговый двигатель не способен вытягивать большую нагрузки, так как выдает лишь половину момента.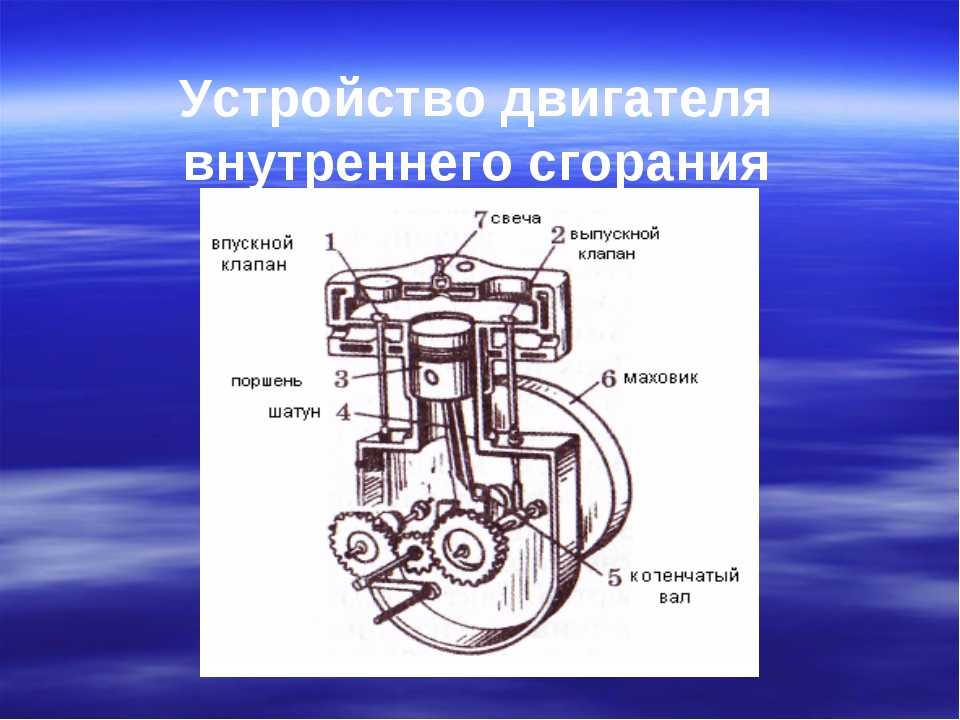
Полношаговый – в таком режиме происходит одновременная коммутация фаз, то есть, возбуждаются сразу обе. Из-за чего обеспечивается максимальный момент, в случае параллельного соединения или последовательного включения обмоток будет создаваться максимальное напряжение или ток.
Полношаговое управлениеПолушаговый – представляет собой комбинацию двух предыдущих методов коммутации обмоток. Во время реализации которого в шаговом двигателе происходит поочередная подача напряжения сначала в одну катушку, а затем сразу в две. Благодаря чему обеспечивается лучшая фиксация на максимальных скоростях и большее количество шагов.
Полушаговое управлениеДля более мягкого управления и преодоления инерции ротора используется микрошаговое управление, когда синусоида сигнала осуществляется микроступенчатыми импульсами. За счет чего силы взаимодействия магнитных цепей в шаговом двигателе получают более плавное изменение и, как следствие, перемещение ротора между полюсами. Позволяет в значительной степени снизить рывки шагового двигателя.
Позволяет в значительной степени снизить рывки шагового двигателя.
Без контроллера
Для управления бесколлекторными двигателями применяется система Н-моста. Который позволяет переключать полярность для реверса шагового двигателя. Может выполняться на транзисторах или микросхемах, которые создают логическую цепочку для перемещения ключей.
Схема Н-мостаКак видите, от источника питания V напряжение подается на мост. При попарном включении контактов S1 – S4 или S3 – S2 будет происходить движение тока через обмотки двигателя. Что и обусловит вращение в ту или иную сторону.
С контроллером
Устройство контроллера позволяет осуществлять управление шаговым двигателем в различных режимах. В основе контроллера лежит электронный блок, формирующий группы сигналов и их последовательность, посылаемых на катушки статора. Для предотвращения возможности его повреждения в случае короткого замыкания или другой аварийной ситуации на самом двигателе каждый вывод защищается диодом, который не пропусти импульс в обратную сторону.
Популярные схемы управления ШД
Схема управления от контроллера с дифференциальным выходомЯвляется одним из наиболее помехозащищенных способов работы. При этом прямой и инверсный сигнал напрямую подключается к соответствующим полюсам. В такой схемы должно применяться экранирование сигнального проводника. Прекрасно подходит для нагрузки с низкой мощностью.
Схема управления от контроллера с выходом типа «открытый коллектор»В данной схеме происходит объединение положительных вводов контроллера, которые подключаются к положительному полюсу. В случае питания выше 9В требуется включение в схему специального резистора для ограничения тока. Позволяет задавать необходимое количество шагов со строго установленной скоростью, определить ускорение и т.д.
Простейший драйвер шагового двигателя своими руками
Чтобы собрать схему драйвера в домашних условиях могут пригодиться некоторые элементы от старых принтеров, компьютеров и другой техники. Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Вам понадобятся транзисторы, диоды, резисторы (R) и микросхема (RG).
Для построения программы руководствуйтесь следующим принципом: при подаче на один из выводов D логической единицы (остальные сигнализируют ноль) происходит открытие транзистора и сигнал проходит к катушке двигателя. Таким образом, выполняется один шаг.
На основе схемы составляется печатная плата, которую можно попытаться изготовить самостоятельно или сделать под заказ. После чего на плате впаиваются соответствующие детали. Устройство способно управлять шаговым устройством от домашнего компьютера за счет подключения к обычному USB порту.
Полезное видео
Программное обеспечение для управления устройствами Android | Приложение Android MDM
Решение Android MDM — это программное обеспечение или инструмент для управления мобильными устройствами, который упрощает управление устройствами Android, позволяя ИТ-администраторам регистрировать, управлять, контролировать и защищать корпоративные и личные устройства Android с единой консоли. Как правило, приложение Android MDM необходимо установить на само устройство Android, чтобы получать и выполнять команды, инициированные ИТ-администратором с серверной консоли решения Android MDM.
Mobile Device Manager Plus (MDM) — это решение Android MDM, которое позволяет вам управлять устройствами Android под управлением Android 4.0 или более поздних версий с широкими возможностями управления мобильными устройствами, доступными для управления устройствами Android. От базовых возможностей управления мобильными устройствами Android, таких как автоматическая регистрация, управление приложениями, упреждающие меры безопасности и т. д., до расширенных конфигураций управления мобильными устройствами для устройств Android, таких как режим киоска, режим пропажи и т. д.
ManageEngine MDM — это интуитивно понятный и простой в использовании используйте приложение Android MDM для управления устройствами Android, поскольку оно предоставляет ИТ-администраторам необходимый набор конфигураций управления устройствами Android для эффективного управления устройствами Android на предприятии. Mobile Device Manager Plus обеспечивает поддержку всех основных функций диспетчера устройств Android в дополнение к расширенным возможностям программного обеспечения Android MDM.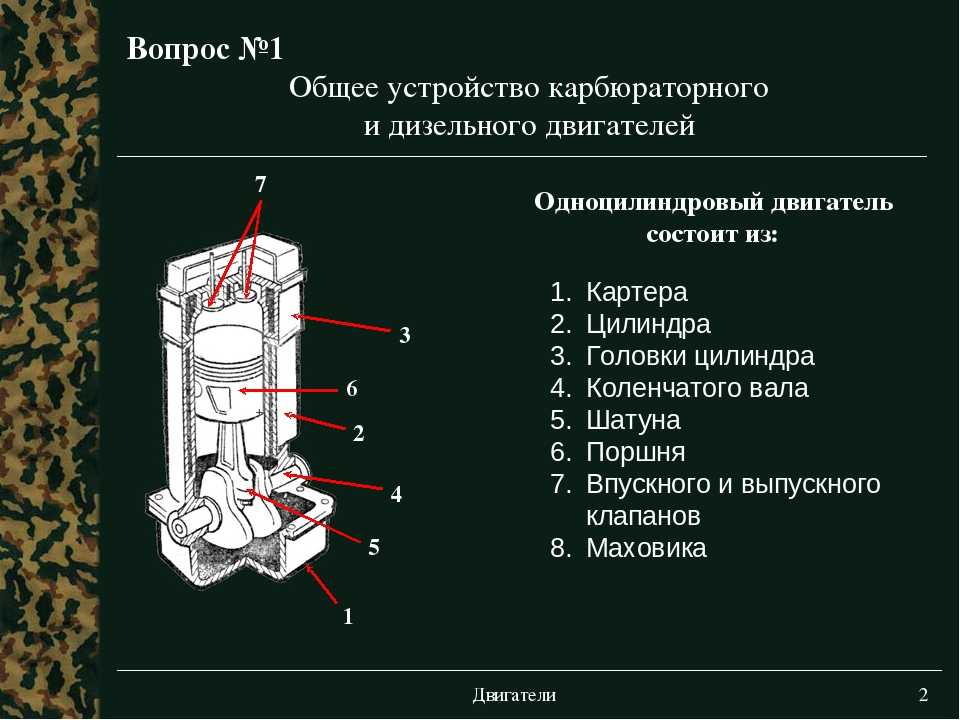 Для управления устройствами Android на устройстве должно быть установлено приложение ME MDM для устройств Android. Это приложение MDM для Android, помимо того, что оно действует как клиентское приложение MDM на устройстве Android, предоставляет несколько других функций управления, выступающих в качестве приложения для управления устройством Android.
Для управления устройствами Android на устройстве должно быть установлено приложение ME MDM для устройств Android. Это приложение MDM для Android, помимо того, что оно действует как клиентское приложение MDM на устройстве Android, предоставляет несколько других функций управления, выступающих в качестве приложения для управления устройством Android.
Подробнее об управлении устройствами Android и Android для MDM можно узнать здесь.
Как управлять Android-устройствами?
Наиболее оптимальный способ управления устройствами Android в организациях — создать комплексную систему управления устройствами Android путем развертывания решения Android MDM. Диспетчер мобильных устройств Android предоставляет организациям единую консоль для выполнения всех задач по управлению устройствами Android. С помощью этой консоли ИТ-администраторы смогут отслеживать и передавать команды на Android-устройства сотрудников даже удаленно, облегчая реализацию на них необходимых мер безопасности в режиме реального времени. Программное обеспечение для управления устройствами Android позволяет ИТ-администраторам:
Программное обеспечение для управления устройствами Android позволяет ИТ-администраторам:
- Обеспечьте управление корпоративными и личными устройствами Android, установив приложение Android MDM.
- Установка, удаление, настройка и обновление Магазина и корпоративных приложений без вмешательства администратора
- Легко распределяйте корпоративные ресурсы, такие как документы и мультимедийные файлы, на устройства
- Удаленное обслуживание устройств путем устранения неполадок или отслеживания устройств на основе использования устройства
Для управления устройствами Android требуется специальное приложение MDM, позволяющее администраторам выполнять вышеуказанные задачи управления мобильными устройствами на устройствах Android.
Приложение MDM для Android
Комплексное приложение Android MDM предоставляет организациям единую консоль MDM для управления устройствами Android, включая смартфоны, планшеты и телевизоры. Mobile Device Manager Plus от ManageEngine — это одно из таких программ для управления мобильными устройствами Android (MDM для Android), которое ИТ-администраторы могут использовать для управления устройствами Android на протяжении всего их жизненного цикла в организации, начиная с регистрации и заканчивая выходом из эксплуатации.
Mobile Device Manager Plus от ManageEngine — это одно из таких программ для управления мобильными устройствами Android (MDM для Android), которое ИТ-администраторы могут использовать для управления устройствами Android на протяжении всего их жизненного цикла в организации, начиная с регистрации и заканчивая выходом из эксплуатации.
После настройки Mobile Device Manager Plus для управления устройствами Android пользователи могут загрузить приложение ManageEngine MDM из Play Store и начать процесс регистрации, или вы можете инициировать регистрацию прямо с сервера с минимальным вмешательством пользователя.
Приложение MDM для устройств Android является обязательным для управления устройствами Android с помощью Mobile Device Manager Plus и использования всех преимуществ, предлагаемых приложением Android MDM.
Функции программного обеспечения Android MDM
Программное обеспечение MDM для Android или Android Приложение MDM должно поддерживать следующие функции, чтобы предоставить организациям комплексное управление устройствами Android:
Регистрация устройств Android
- ) регистрация устройств для корпоративных и личных устройств Android
- Зарегистрируйте устройства в диспетчере устройств Android в зависимости от владельца.
- Подтвердите регистрацию с помощью одноразового кода доступа (OTP) и/или учетных данных пользователя Active Directory (AD).
- Зарегистрируйте несколько устройств для одного пользователя.
- Массовая регистрация и управление устройствами Android с помощью регистрации Samsung Knox и регистрации Zero Touch.
Узнайте больше о регистрации устройств Android здесь.
Управление профилями Android
- Создание и применение политик и ограничений для управления Android.
- Настройте параметры политики Active Directory (AD) для доступа к корпоративным ресурсам с помощью приложения Android MDM.
- Ограничьте использование камеры, Bluetooth, браузера и т. д. для повышения безопасности.
- Разделяйте устройства Android в зависимости от того, являются ли они корпоративными или частными (BYOD), и применяйте соответствующие политики и ограничения для управления устройствами Android.
Узнайте больше о профилях Android здесь.
Управление приложениями для Android
- Управляйте и распространяйте собственные приложения и приложения из Play Store без вмешательства администратора.
- Получение отчетов для отслеживания состояния приложений, установленных на управляемых устройствах Android.
- Публикуйте приложения в каталоге приложений, чтобы пользователи могли выбирать и устанавливать их самостоятельно.
- Блокируйте приложения, не одобренные организацией, чтобы предотвратить использование и/или установку этих приложений.
- Заблокируйте устройства для одного приложения или набора приложений и ограничьте доступ к другим приложениям, настройкам и функциям устройства.
Узнайте больше об управлении приложениями Android здесь.
Управление безопасностью Android
- Настройте пароли устройств, от простых до сложных, в соответствии с потребностями организации.
- Удаленная блокировка устройств Android для предотвращения несанкционированного доступа.
- Выполнить дистанционную сигнализацию для определения любых потерянных устройств.
- Выполните удаленную очистку, чтобы предотвратить потерю или кражу данных.
- Выполнение корпоративной очистки для удаления конфиденциальных корпоративных данных, таких как электронная почта, документы и т. д.
Узнайте больше об управлении безопасностью Android здесь.
Аудит и отчеты
- Выполнение настойчивого мониторинга путем создания обновленных отчетов о состоянии устройств Android.
- Создание настраиваемых отчетов на основе таких критериев, как приложения по устройствам, устройства по моделям и т. д.
Узнайте больше об управлении ресурсами Android здесь.
Попробуйте Android MDM ManageEngine бесплатно в течение 30 дней и упростите управление устройствами Android.
Рекомендуемые устройства | Библиотека Вуфориа
Перечисленные ниже устройства представляют собой некоторые из наиболее популярных устройств, используемых с Vuforia Engine. Другие устройства, не указанные в списке, также могут поддерживать Vuforia Engine. Дополнительную информацию о совместимости конкретных устройств с функциями Vuforia Engine можно найти в таблице ниже.
Другие устройства, не указанные в списке, также могут поддерживать Vuforia Engine. Дополнительную информацию о совместимости конкретных устройств с функциями Vuforia Engine можно найти в таблице ниже.
Рекомендуемые устройства протестированы и проверены на совместимость с Vuforia Engine. Этот список регулярно обновляется с учетом новых тенденций использования устройств и выпусков Vuforia Engine.
Vuforia Engine поддерживает отслеживание только визуального восприятия для таких функций, как Image Targets, Cylinders, Multi Targets, VuMarks и т. д. на устройствах, помимо перечисленных ниже. Даже устройства, которые не поддерживают ARKit, ARCore или Vuforia VISLAM через Vuforia Fusion, могут поддерживать вышеупомянутые функции.
Расширенные функции, такие как целевые модели, целевые области и плоскость земли, требуют поддержки отслеживания устройств с помощью Vuforia Fusion. Список рекомендуемых устройств содержит только часть этих устройств — дополнительные устройства, поддерживающие ARKit или ARCore, также могут поддерживать расширенные функции через Vuforia Fusion. Полный список см. в матрице совместимости устройств ARKit и поддерживаемых ARCore устройствах.
Полный список см. в матрице совместимости устройств ARKit и поддерживаемых ARCore устройствах.
ПРИМЕЧАНИЕ. Целевые области поддерживаются только на устройствах с поддержкой ARKit или ARCore и Microsoft HoloLens 2. Устройства с поддержкой VISLAM не поддерживаются.
Другие требования к устройствам и функциям можно найти на странице Поддерживаемые версии .
iOS-устройства
Имя устройства | Комментарии |
|---|---|
iPhone SE (2-го и 3-го поколения) |
|
iPhone 8, iPhone 8 Plus |
|
iPhone X, iPhone XR, iPhone XS, iPhone XS Max |
|
iPhone 11, iPhone 11 Pro, iPhone 11 Pro Max |
|
iPhone 12 mini, iPhone 12, iPhone 12 Pro, iPhone 12 Pro Max | iPhone 12 Pro и iPhone 12 Pro Max поддерживают приложение Vuforia Area Target Creator 9. |
| iPhone 13 mini, iPhone 13, iPhone 13 Pro, iPhone 13 Pro Max | iPhone 13 Pro и iPhone 13 Pro Max поддерживают приложение Vuforia Area Target Creator | .
iPad Mini (5-го и 6-го поколения) |
|
iPad Air 3, iPad Air 4 |
|
| iPad (с 5 по 9 поколение) |
|
iPad Pro iPad Pro 9,7 дюйма, iPad Pro 10,5 дюйма, iPad Pro 11 дюймов (с 1-го по 3-е поколение), iPad Pro 12,9 дюйма (с 3-го по 5-е поколение) |
iPad Pro 11 дюймов (2-го и 3-го поколения) и iPad Pro 12,9 дюйма (4-го и 5-го поколений) поддерживают приложение Vuforia Area Target Creator |
 0003
0003Android-устройства
Имя устройства | Комментарии |
|---|---|
Samsung Galaxy A20e СМ-А202Ф, СМ-А202К |
|
Samsung Galaxy A40 СМ-А405ФН, СМ-А405С, СМ-А405ФМ | |
Самсунг Галакси А41 СМ-А415Ф | |
Samsung Galaxy A50 |
|
Самсунг Галакси А51 SM-A515F, SM-A515U, SM-A515U1, SM-A515W, SM-A515X | |
Самсунг Галакси А52 СМ-А525Ф, СМ-А525М | |
Samsung Galaxy A52s 5G СМ-А528Б, СМ-А528Н | |
Samsung Galaxy A71 СМ-А715Ф, СМ-А715В, СМ-А715Х | |
Samsung Galaxy Note 9 |
|
| Samsung Galaxy Note 10/Note 10 5G
|
|
| Samsung Galaxy Note 10+/Note 10+ 5G SM-N975F, SM-N975X, SM-N975U, SM-N975U1, SM-N975C, SM-N975W, SM-N9750, SC-01M, SCV45, SM-N976N, SM-N976B, SM-N976Q, SM-N976U, SM- N976V, СМ-N9760
|
|
Samsung Galaxy Note 20/Note 20 5G СМ-Н981Б, СМ-Н9810, СМ-Н981Н, СМ-Н981У, СМ-Н981У1, СМ-Н981В |
|
Samsung Galaxy Note 20 Ultra/Note 20 Ultra 5G СМ-Н986Б, СМ-Н9860, СМ-Н986Н, СМ-Н986У, СМ-Н986У1, СМ-Н986В |
|
Samsung Galaxy S9 |
|
Samsung Galaxy S9+ Exynos | Рекомендовать службы Google для AR версии 1. |
Samsung Galaxy S9+ Snapdragon |
|
Samsung Galaxy S10e |
|
Samsung Galaxy S10/S10 5G |
|
Samsung Galaxy S10+ |
|
| Samsung Galaxy S20/S20 5G |
|
Samsung Galaxy S20+/S20+ 5G Exynos |
|
| Samsung Galaxy S20+/S20+ 5G Snapdragon SC-52A, SCG02, SM-G986N, SM-G986U, SM-G986U1, SM-G986W, SM-G9860 | Рекомендовать службы Google для AR версии 1. |
Samsung Galaxy S20 Ultra/S20 Ultra 5G Exynos | |
Samsung Galaxy S20 Ultra/S20 Ultra 5G Snapdragon | Vuforia Fusion поддерживается для SDK 10.8+. Рекомендовать сервисы Google для AR версии 1.31+ |
Samsung Galaxy S21/S21 5G SM-G991B, SM-G991N, SM-G991U, SM-G991U1, SM-G991W, SM-G9910 | |
Samsung Galaxy S21+ SM-G996B, SM-G996N, SM-G996U, SM-G996U1, SM-G996W, SM-G9960 | |
Samsung Galaxy S21 Ультра СМ-Г998Б, СМ-Г998Н, СМ-Г998У, СМ-Г998У1, СМ-Г998В, СМ-Г9980 | |
Samsung Galaxy S22 SM-S901B, SM-S901E, SM-S901N, SM-S901U, SM-S901U1, SM-S901W, SM-S9010 | |
Samsung Galaxy S22+ SM-S906B, SM-S906E, SM-S906N, SM-S906U, SM-S906U1, SM-S906W, SM-S9060 | |
Samsung Galaxy S22 Ultra SM-S908B, SM-S908E, SM-S908N, SM-S908U, SM-S908U1, SM-S908W, SM-S9080 | |
Вкладка Samsung Galaxy S6 Lite СМ-П610, СМ-П615 | |
Samsung Galaxy Tab S6 |
|
Huawei P20 lite |
|
Huawei P20 |
|
Huawei P20 Pro |
|
Huawei P30 |
|
Huawei P30 Pro |
|
Xiaomi Redmi Note 8, Note 8T, Note 8 Pro, Note 9S, Note 9 Pro |
|
Google Pixel 4a/4a 5G |
|
| Google Pixel 5/5a 5G | |
| Google Pixel 6/6a/6 Pro |
 9+
9+ 21+
21+Устройства UWP
| Имя устройства | |
|---|---|
Поверхность Майкрософт Surface Pro 6, Surface Pro 7, Surface Go, Surface Go 2, Surface Pro X |
|
Очки
| Имя устройства | |
|---|---|
Майкрософт ХолоЛенс 1*, ХолоЛенс 2 | Поддерживаются все функции, кроме Ground Plane. * HoloLens 1 больше не поддерживается Vuforia Engine 10.9+ |
Волшебный прыжок Magic Leap 1 * , Magic Leap One Creator Edition * , Magic Leap 2 | Поддерживаются все функции, кроме целей на плоскости и площади. Для эквивалентной функциональности используйте SDK, предоставленный OEM. * Поддержка Magic Leap 1 устарела в Vuforia Engine 10.9 |
Вузикс М400 | Поддерживаемые функции: ImageTargets, CylinderTarget, Multi Targets, VuMark, ObjectTargets. Расширенное отслеживание не поддерживается (без отслеживания устройств). |
RealWear ГМТ-1, ГМТ-1Z1 | Поддерживаемые функции: ImageTargets, CylinderTarget, Multi Targets, VuMark, ObjectTargets. Расширенное отслеживание не поддерживается (без отслеживания устройств). |
 Для эквивалентной функциональности используйте SDK, предоставленный OEM.
Для эквивалентной функциональности используйте SDK, предоставленный OEM.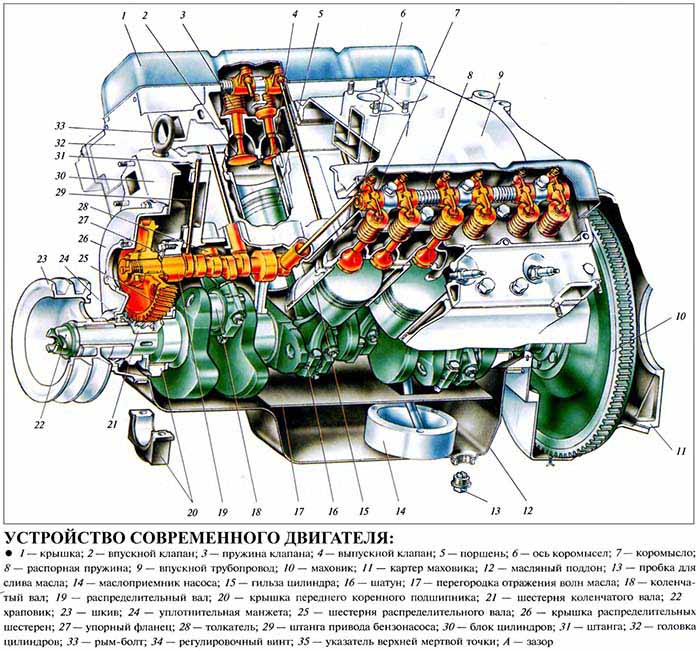
Можно ли сделать эту страницу лучше?
Поделитесь своим мнением на нашем форуме сообщества
DICE: Механизм составления идентификаторов устройств
, также известный как RIoT (Надежный | Отказоустойчивый | Восстанавливаемый — IoT)
DICE (ранее называвшийся RIoT) — это семейство аппаратных и программных методов для аппаратной криптографической идентификации устройств, аттестации и шифрования данных.
Аппаратные требования DICE чрезвычайно скромны: даже самые маленькие микроконтроллеры могут позволить себе поддержку DICE. Аппаратное обеспечение DICE в сочетании с программным обеспечением, протоколами и службами DICE обеспечивает исключительно компактный и надежный аппаратно-программный корень доверия для базового управления.
DICE является отраслевым стандартом, и оборудование DICE доступно у все большего числа поставщиков оборудования.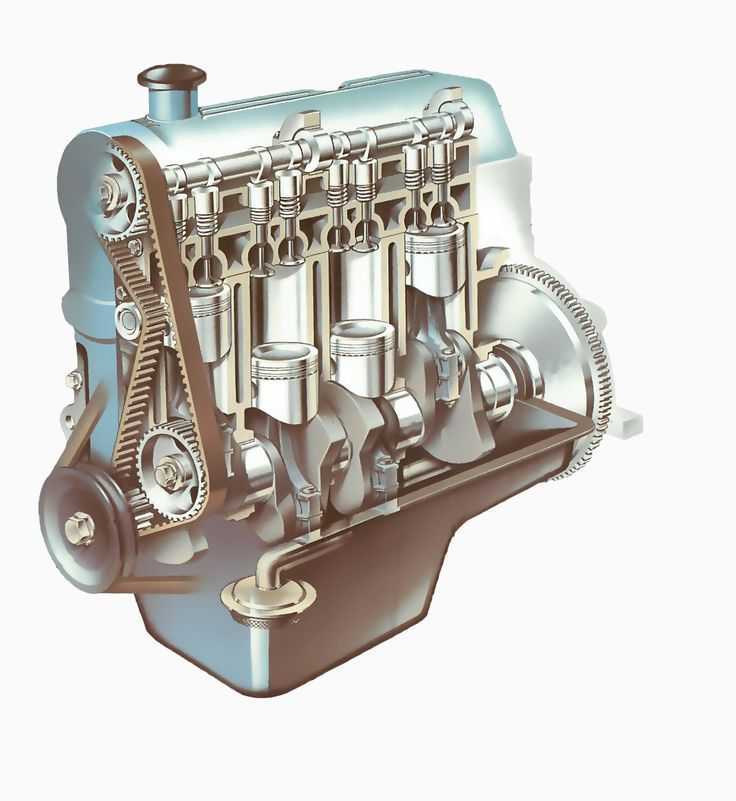 DICE также поддерживается Azure IoT и является одним из основных корней доверия в центрах обработки данных Microsoft Azure.
DICE также поддерживается Azure IoT и является одним из основных корней доверия в центрах обработки данных Microsoft Azure.
Многие SOC содержат блоки предохранителей (или другую энергонезависимую память), которые можно использовать для хранения криптографических ключей для шифрования данных или идентификации устройства. Однако, если код, работающий на SoC, скомпрометирован, может произойти утечка значения объединенного секретного ключа (далее называемого уникальным секретом устройства или UDS). Надежная перекодировка таких скомпрометированных устройств может быть затруднена или невозможна.
Поставщики SoC иногда минимизируют риски компрометации UDS, ограничивая среды выполнения, которые могут считывать значение предохранителя. Например, процессоры ARM, реализующие TrustZone™, часто ограничивают доступ банка предохранителей к Trusted Execution Environments (TEE), работающим в безопасном мире. Это, безусловно, снижает риск компрометации, но современные TEE содержат десятки или сотни тысяч строк кода, поэтому риски остаются.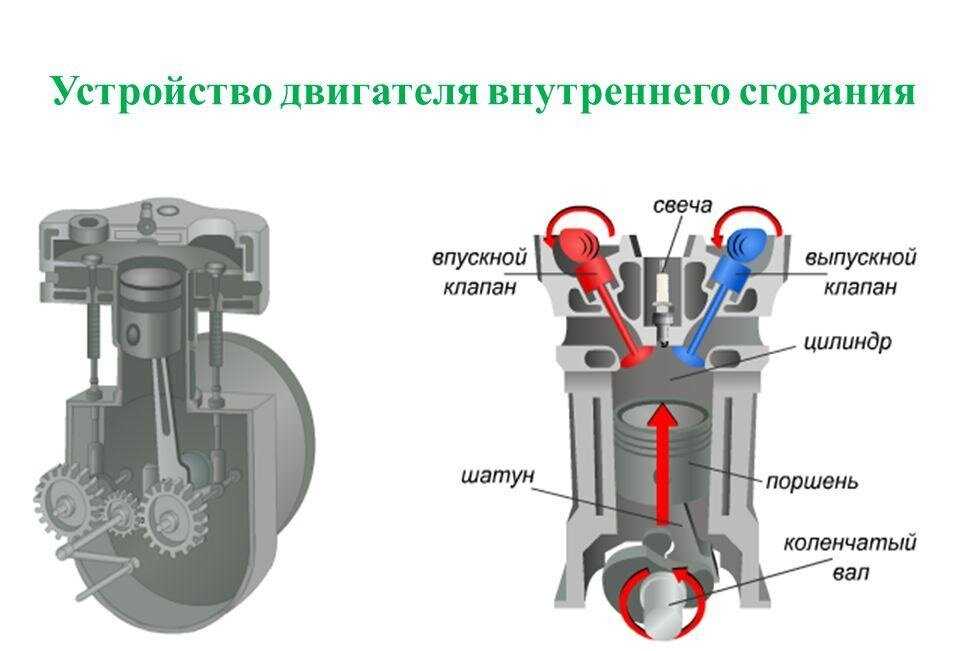
DICE использует три метода, чтобы резко ограничить объем кода, имеющего доступ к уникальному секрету устройства. Методы:
Блокировка при включении питания
Оборудование DICE должно включать механизм блокировки, который код ранней загрузки (или внутренний микрокод SoC) может использовать для отключения доступа на чтение к UDS перед передачей управления сложной микропрограмме. . После того, как секрет устройства скрыт, для восстановления доступа требуется перезагрузка платформы или перезагрузка.
Защелки могут значительно уменьшить поверхность атаки для компрометации ключа устройства, потому что код ранней загрузки может быть очень простым, а код ранней загрузки может задействовать защелку защиты до того, как будут выполнены сложные функции. Вредоносное ПО, которое появляется позже при загрузке или во время выполнения, не может прочитать UDS, поскольку оно защищено аппаратной защелкой.
Криптографические односторонние функции
Защелка хранилища для защиты от чтения может использоваться для защиты UDS, но если загрузочный код просто создает копию UDS в ОЗУ, то компрометация более поздней прошивки все равно приведет к необратимому ключу раскрытие.
Уловка для смягчения этой опасности заключается в использовании криптографической односторонней функции для преобразования UDS. Затем, если более поздний код будет скомпрометирован, производный ключ может быть раскрыт, но основной ключ UDS останется безопасным.
Связывание производного ключа с идентификацией программного обеспечения
Последним элементом головоломки является преобразование UDS с помощью криптографической односторонней функции получения ключа, которая зависит от идентификатора кода ранней загрузки, работающего на устройстве.
Самая простая односторонняя функция:
CDI = HMAC (UDS, HASH (Program)) [1]
Где:
CDI -идентификация устройства соединения .0956 : значение, которое зависит как от аппаратного обеспечения , так и от программного обеспечения, которое загрузилось. Хэш (программа) — это криптографический хэш кода, который начинает выполняться при включении питания или сбросе.
Причина привязки CDI-происхождения к коду, загружаемому на устройстве, заключается в том, что обновление микропрограммы автоматически приводит к изменению ключа устройства. Такое поведение полностью соответствует проблемам безопасности, которые мы пытаемся решить. А именно:
1) Если злоумышленник может изменить код, который загружается на устройстве, с целью кражи ключей, атакующая программа (с другим хэшем) получает ключ , отличный от авторизованной программы .
2) Если авторизованный код содержит уязвимость, приводящую к компрометации CDI, то ключ устройства необходимо сменить. Функция вывода CDI [1] гарантирует, что исправление уязвимой микропрограммы автоматически приводит к созданию нового CDI.
Поведение ядра DICE, определяемое уравнением [1], теперь является отраслевым стандартом.
Поведение DICE, заданное уравнением [1], очень простое и может быть легко реализовано с помощью внутреннего микрокода SoC или прошивки устройства на основе ПЗУ. Однако, если используется этот простой алгоритм формирования ключа, обновление прошивки приводит к получению нового производного CDI-ключа, который не может быть связан со старым ключом. В некотором смысле это «фича», потому что потенциально скомпрометированный ключ был заменен. Однако, если предыдущий CDI использовался для идентификации устройства, то исправленное устройство больше не будет распознаваться, а если CDI использовался для шифрования данных, то данные больше нельзя будет расшифровать. т.е. поведение DICE в [1] простое и надежное, но управляемости не хватает.
Однако, если используется этот простой алгоритм формирования ключа, обновление прошивки приводит к получению нового производного CDI-ключа, который не может быть связан со старым ключом. В некотором смысле это «фича», потому что потенциально скомпрометированный ключ был заменен. Однако, если предыдущий CDI использовался для идентификации устройства, то исправленное устройство больше не будет распознаваться, а если CDI использовался для шифрования данных, то данные больше нельзя будет расшифровать. т.е. поведение DICE в [1] простое и надежное, но управляемости не хватает.
Проблемы с управляемостью можно смягчить, встроив дополнительные механизмы управления/обновления в механизм DICE. К сожалению, дополнительная сложность увеличивает вероятность компрометации движка DICE, а разные сценарии требуют разных компромиссов между безопасностью и управляемостью.
Лучшим решением является организация загрузочного кода в «слои», при этом нижние уровни оптимизированы для простоты, а верхние уровни добавляют более сложные функции управления. Например, самый низкий DICE-Engine 9Уровень 0956 может использовать уравнение [1] для создания CDI; второй уровень DICE-Core , специфичный для устройства/сценария, может использовать CDI для создания дополнительных ключей и функций управления. См. рис. 1.
Например, самый низкий DICE-Engine 9Уровень 0956 может использовать уравнение [1] для создания CDI; второй уровень DICE-Core , специфичный для устройства/сценария, может использовать CDI для создания дополнительных ключей и функций управления. См. рис. 1.
Рис. 1. Простой механизм DICE, интегрированный в SoC, с более сложными функциями управления на уровне ядра DICE.
Корпорация Майкрософт стандартизировала и предоставила открытый исходный код уровня DICE Core, который обеспечивает безопасное и управляемое обновление устройств. См. рис. 2.
Этот уровень DICE Core:
- Получает пару ключей ECC, которая будет стабильной в течение всего срока службы устройства и никогда не раскрывается за пределами DICE Core. Это называется парой ключей DeviceID.
- Получает вторую пару ключей, называемую ключом-псевдонимом, которая зависит от идентификатора следующего уровня . Новая пара псевдонимов ключей создается, если прошивка основного устройства когда-либо обновлялась
- Создает сертификат для ключа псевдонима, используя закрытый ключ DeviceID.
 Сертификат также содержит информацию об аттестации, чтобы проверяющие стороны могли узнать, обновлена ли прошивка устройства
Сертификат также содержит информацию об аттестации, чтобы проверяющие стороны могли узнать, обновлена ли прошивка устройства - Создает запрос на подпись сертификата (для упрощения производственных процессов, когда устройство сертифицировано поставщиком)
- Создает самозаверяющий сертификат DeviceID (для поддержки устройств, не сертифицированных поставщиком)
Сертификаты предназначены для использования в сеансах TLS, поддерживающих аутентификацию клиента TLS.
Более подробная информация содержится в отраслевом стандарте и в этом техническом документе.
Рис. 2. Схема базового уровня DICE, позволяющего контролировать обновления встроенного ПО и дополнительные сертификаты для упрощения производства. Дескриптор безопасности прошивки определяет характеристики безопасности оставшейся прошивки устройства.
- Спецификация оборудования DICE
- Стандарт сертификата DICE для TLS
- Версия стандарта сертификата Microsoft
- Технический документ с более подробным описанием технологии DICE/RIoT
- Реализация DICE с открытым исходным кодом от Microsoft, содержащая справочный код, порты для конкретных SoC, код проверки и симуляторы DICE
- DICE является частью программы Cyber-Resilient Platform.
