Роботизированная коробка передач — что это такое, устройство и принцип работы коробки робот
Современные автомобили все чаще оснащаются коробками передач роботизированного типа. В обиходе такие коробки еще называют «роботами». Само наименование «роботизированная КПП» указывает на то, что действиями водителя с учетом условий движения автомобиля, формируется «входная информация» для электронного блока коробки (робота), который, посредством заложенных алгоритмов, руководит работой всего узла. Главным преимуществом роботизированных коробок передач является то, что эти агрегаты эффективно сочетают комфорт и удобство в эксплуатации привычной автоматической коробки с надежностью и топливной экономичностью обыкновенной «механики». Кроме того, как правило, коробка-робот существенно дешевле традиционной автоматической коробки. Сегодня «роботы» устанавливаются как на дорогие модели премиум-класса, так и на автомобили массового и даже бюджетного сегмента.
Роботизированная коробка передач способна работать в автоматическом, а также полуавтоматическом режимах. Для водителя работа роботизированной КПП будет практически неотличима от работы обычной коробки-автомата. При достижении определенной скорости движения электронный блок, на основании поступающих сигналов от входных датчиков, обеспечивает нужный алгоритм работы коробки при помощи исполнительных механизмов. Помимо этого, любая роботизированная коробка передач обладает функцией ручного переключения передач, называемой типтроник. Правда, в отличие от обычной «механики», при ручном переключении рычаг «робота» не нужно устанавливать в конкретное положение, определенное для той или иной передачи. Переключение в ручном режиме производится последовательно с низшей на высшую передачу и наоборот простым покачиванием селектора вперед или назад. Иногда роботизированную КПП, благодаря особенности последовательного переключения передач в ручном режиме, называют еще секвентальной (sequensum – последовательность). Для некоторых разновидностей роботизированных коробок дополнительно предусмотрены подрулевые лепестки, при помощи которых можно переключать передачи, не отрывая рук от рулевого колеса.
Для водителя работа роботизированной КПП будет практически неотличима от работы обычной коробки-автомата. При достижении определенной скорости движения электронный блок, на основании поступающих сигналов от входных датчиков, обеспечивает нужный алгоритм работы коробки при помощи исполнительных механизмов. Помимо этого, любая роботизированная коробка передач обладает функцией ручного переключения передач, называемой типтроник. Правда, в отличие от обычной «механики», при ручном переключении рычаг «робота» не нужно устанавливать в конкретное положение, определенное для той или иной передачи. Переключение в ручном режиме производится последовательно с низшей на высшую передачу и наоборот простым покачиванием селектора вперед или назад. Иногда роботизированную КПП, благодаря особенности последовательного переключения передач в ручном режиме, называют еще секвентальной (sequensum – последовательность). Для некоторых разновидностей роботизированных коробок дополнительно предусмотрены подрулевые лепестки, при помощи которых можно переключать передачи, не отрывая рук от рулевого колеса.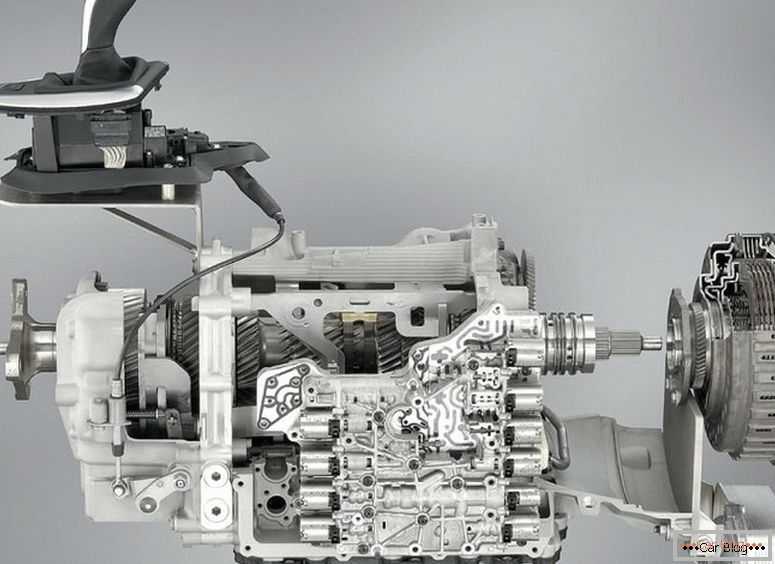
Устройство роботизированной коробки передач
Роботизированные коробки разных производителей могут несколько разниться по конструкции, но общий принцип функционирования таких агрегатов единый – любая роботизированная КПП представляет собой механическую коробку передач, которая наделена системой, управляющей передачами и сцеплением.
В коробках-«роботах» применяется фрикционный механизм сцепления. Для этого может использоваться отдельный диск, либо набор фрикционных дисков. Многие современные роботизированные коробки передач оборудуются системой двойного сцепления, при помощи которой обеспечивается передача крутящего момента с постоянным потоком мощности. Учитывая что основой любой роботизированной коробки передач является агрегат механического типа, производители используют, как правило, уже готовые решения. Так, к примеру, известный агрегат Speedshift, выпускаемый на мощностях Mercedes-Benz, построен на основе коробки 7G-Tronic, у которой гидротрансформатор заменен на многодисковое сцепление фрикционного типа. А для создания баварской роботизированной коробки SMG использован шестиступенчатый механический агрегат, доработанный сцеплением с электрогидравлическим приводом.
А для создания баварской роботизированной коробки SMG использован шестиступенчатый механический агрегат, доработанный сцеплением с электрогидравлическим приводом.
Примечательно, что «роботы» могут располагать, как гидравлическим, так и электрическим приводом передач и сцепления. Исполнительными узлами электрического привода коробки выступают сервомеханизмы (механическая передача с электромотором). Работа гидравлического привода коробки-робота осуществляется при помощи гидроцилиндров, управляемых электромагнитными клапанами. Подобная разновидность привода нередко именуется электрогидравлическим приводом. В некоторых роботизированных коробках передач, оснащаемых приводом электрического типа, например, Durashift, устанавливаемых на ряд моделей Ford, применяется гидромеханический блок, комплектуемый электродвигателем, который перемещает главный цилиндр привода сцепления.
Коробки-роботы с электроприводом устанавливают обычно на недорогие модели массовых брендов. Ведь электропривод, хотя и отличается невысоким энергопотреблением, не может обеспечить высокую скорость работы – переключение передачи составляет от 0. 3 до 0.5 секунды. Система гидропривода в коробке требует наличие постоянного давления, достигаемое более высоким энергопотреблением. Роботы с гидравлическим приводом намного более быстродейственны – нередко роботизированные коробки с гидроприводом устанавливают даже на спортивные автомобили.
3 до 0.5 секунды. Система гидропривода в коробке требует наличие постоянного давления, достигаемое более высоким энергопотреблением. Роботы с гидравлическим приводом намного более быстродейственны – нередко роботизированные коробки с гидроприводом устанавливают даже на спортивные автомобили.
Управление «роботом» обеспечивается электронной системой, ответственной за включение и работу блока управления, входных датчиков и исполнительных механизмов. Такие основные параметры, как частота вращения, положение селектора или состояние вилок включения передачи, а также температура и давление масла (для системы с гидравлическим приводом) считываются датчиками и передаются к блоку управления. Затем электронный блок, на основании заложенной программы, вызывает необходимые воздействия на механизмы-исполнители. Стоит отметить, что в роботизированной КПП с гидроприводом система управления дополнена блоком, обеспечивающим функционирование гидроцилиндрами и обеспечивающим необходимый уровень давления.
В зависимости от типа привода, роль исполнительных механизмов роботизированной КПП выполняют электромоторы или электромагнитные клапаны, которыми оснащаются гидроцилиндры.
Коробка-робот с двойным сцеплением
Широкое распространение за последние пару лет получили роботизированные коробки передач с системой двойного сцепления. Дело в том, что главным недостатком стандартной коробки-робота считается довольно длительное время, требуемое агрегату на переключение передачи. Зачастую это вызывает провалы в динамике и рывки при активном стиле вождения, что негативно сказывается на уровне комфорта всей поездки в целом. Такая негативная особенность отпугивает немалое количество потенциальных автолюбителей от перспективы приобретения автомобиля, оборудованного роботизированной коробкой передач. Решением проблемы стало использование системы двойного сцепления, которая исключает разрыв потока мощности в момент переключения передачи. Двойное сцепление дает возможность выбрать требуемую передачу еще при включенной предыдущей передаче, и, в случае необходимости, включить следующую передачу не допуская перерыва в работе КПП.![]() Благодаря такой конструктивной характеристике коробки передач с двойным сцеплением получили название преселективных коробок передач.
Благодаря такой конструктивной характеристике коробки передач с двойным сцеплением получили название преселективных коробок передач.
Еще одно важное достоинство коробок с двойным сцеплением – быстродействие при переключении передач. Здесь скорость перехода с одной передачи на другую зависит исключительно от скорости работы муфт. Так, «роботы» DSG от Volkswagen тратят на переключение не более 0.2 сек., а агрегаты DCT M Drivelogic, производимые компанией BMW, – всего 0.1 cек. Кроме того, «робот», оборудованный двумя сцеплениями, представляет собой весьма компактный агрегат, что особенно актуально для небольших городских малолитражек.
Отличия «робота» от «автомата»
Неискушенный автомобилист может не найти отличий между автомобилями, оборудованными автоматической и роботизированной коробками передач. Ведь в салонах таких машин отсутствуют педали сцепления, а селекторы переключения передач выглядят практически одинаково. Но на самом деле, с технической точки зрения, эти агрегаты значительно различаются между собой. Более того, конструктивно робот даже больше схож с механической коробкой. В отличие от «робота» или стандартной МКПП, основными узлами автоматической коробки являются редуктор и гидротрансоформатор, обеспечивающий плавное переключение передач. Именно гидротрансформатор выполняет функцию сцепления обычной МКПП, которым оснащается и РКПП. Таким образом, «робот» является механической коробкой передач, у которой за своевременность переключения передач отвечает электронный блок. А сами переключения производятся автоматически, посредством гидравлики и электронного управления.
Более того, конструктивно робот даже больше схож с механической коробкой. В отличие от «робота» или стандартной МКПП, основными узлами автоматической коробки являются редуктор и гидротрансоформатор, обеспечивающий плавное переключение передач. Именно гидротрансформатор выполняет функцию сцепления обычной МКПП, которым оснащается и РКПП. Таким образом, «робот» является механической коробкой передач, у которой за своевременность переключения передач отвечает электронный блок. А сами переключения производятся автоматически, посредством гидравлики и электронного управления.
Преимущества и недостатки роботизированных коробок передач
Оценивая плюсы и минусы роботизированных коробок передач, стоит отметить, что «робот» удобнее МКПП, ведь здесь не приходится постоянно орудовать рычагом переключения, а отсутствие необходимости выжимать педаль сцепления значительно уменьшает утомляемость водителя. Относительно АКПП, роботизированные коробки обеспечивают большую топливную экономичность и, как правило, имеют меньшую массу. Расход топлива у автомобиля с РКПП приближен к топливному расходу машины с «механикой». Стоимость роботизированной коробки передач также ниже по сравнению с коробкой-автоматом.
Расход топлива у автомобиля с РКПП приближен к топливному расходу машины с «механикой». Стоимость роботизированной коробки передач также ниже по сравнению с коробкой-автоматом.
Что касается недостатков, то основные из них были названы выше – это ощутимые рывки и дергания при переключении передач, свойственные бюджетным автомобилям, оборудованным «роботами». Мало кого порадуют и длительные паузы при переходе с одной передачи на другую. Кроме того, начиная движение в горку, машина с РКПП, как и автомобиль с механической коробкой, может немного откатиться назад.
Впрочем, для объективности картины, стоит отметить, что все перечисленные недостатки устранены на агрегатах с двумя сцеплениями. Роботизированные коробки передач такого типа можно было бы считать оптимальными агрегатами, если бы не их высокая цена.
Роботизированная коробка переключения передач, конструктивные особенности
Роботизированная коробка передач вызывает недоверие среди автолюбителей. Многие водители полагают, что это разновидность автоматических трансмиссий.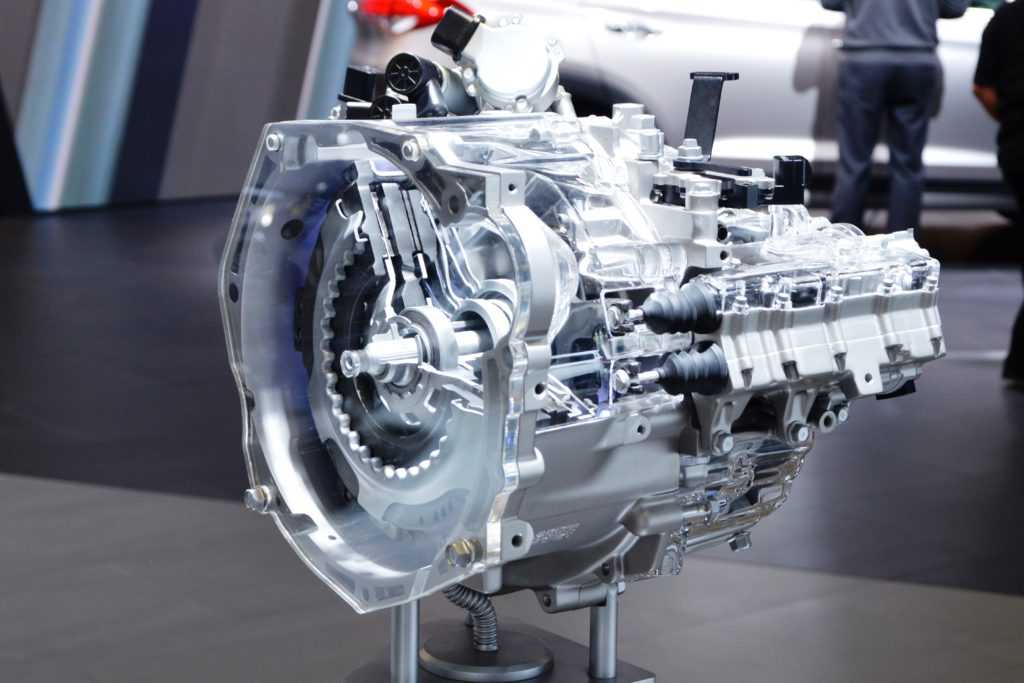 Возникает вопрос: «Почему стоимость робота меньше цены на АКПП?», давайте разберемся.
Возникает вопрос: «Почему стоимость робота меньше цены на АКПП?», давайте разберемся.
Содержание
- 1 Общее знакомство
- 2 Конструктивные особенности, принцип работы
- 3 Достоинства и недостатки
Общее знакомство
Роботизированная коробкаРазличают два основных вида роботизированных коробок:
- Простая. Является усовершенствованной МКПП с автоматическим управлением, переключение скоростей осуществляется роботом, отсутствует педель сцепления. В момент смены передачи разрывается поток крутящего момента — это приводит к появлению провалов при разгоне авто. В таких агрегатах предусмотрена возможность вручную переключать скорости.
- Усовершенствованная (преселективная). Представляет собой механику, оснащенную двумя сцеплениями, имеющими прямое включение. Первое сцепление отвечает за четные передачи, второе — за нечетные. Такой принцип работы обеспечивает плавный и быстрый разгон.
Если вы встретите название «секвентальная» коробка, имейте в виду — такая аббревиатура произошла от слова последовательность (sequensum), значит, предусмотрено последовательное переключение скоростей водителем вручную. Основным достоинством коробок-робот есть сочетание удобства вождения, аналогично АКПП и небольшой расход топлива, как у механических КПП.
Основным достоинством коробок-робот есть сочетание удобства вождения, аналогично АКПП и небольшой расход топлива, как у механических КПП.
Многие производители занимались самостоятельной разработкой роботизированных агрегатов, значит, существует множество разновидностей указанного типа коробок, но при этом у них есть общие узлы:
- блок управления;
- МКПП;
- фрикционное сцепление;
- система, контролирующая смену передач.
За основу роботов берутся хорошо зарекомендовавшие себя механизированные конструкции КПП. Рекомендуем посмотреть видео о роботизированных агрегатах, оснащенных двойным сцеплением:
Конструктивные особенности, принцип работы
Алгоритм работы роботизированных коробок следующий: водитель производит запуск мотора, нажимает на педаль сцепления и выбирает нужное расположение селектора. При этом происходит разрыв потока мощности с помощью привода сцепления, автоматизированный механизм коробки выполняет включение выбранной передачи. Затем автомобилист отпускает педаль тормоза, машина начинает двигаться в выбранном направлении. Последующие переключения скоростей производятся автоматикой с учетом данных из датчиков. Процессор управляет движением машины по заложенной схеме, но водитель имеет возможность вмешиваться в работу коробки.
Затем автомобилист отпускает педаль тормоза, машина начинает двигаться в выбранном направлении. Последующие переключения скоростей производятся автоматикой с учетом данных из датчиков. Процессор управляет движением машины по заложенной схеме, но водитель имеет возможность вмешиваться в работу коробки.
Роботизированные агрегаты могут быть оснащены электрическим или гидравлическим приводом сцепления и передач. В первом типе исполнительными элементами есть сервомеханизмы, состоящие из электродвигателя и механической КПП. Второй тип состоит из гидроцилиндров, управление которыми производится электромагнитными клапанами.
Невысокую скорость смены передач имеет электрический привод, для него также характерны маленькие затраты энергии. Для гидравлического привода нужно поддерживать постоянное давление в системе, значит, происходит большее энергопотребление. Гидропривод при этом обеспечивает большую скорость, его устанавливают на спортивных автомобилях. Указанные параметры определяю область применения агрегатов:
- для бюджетных автомобилей — электрический привод;
- более дорогих марок машин — гидравлический привод.

Роботизированные КПП могут работать в двух режимах:
- автоматический;
- полуавтоматический.
В первом режиме водитель не задумывается о переключении передач, а во втором варианте автомобилист, если машина оснащена подрулевыми лепестками, без переведения машины из автоматического режима может переключить передачу ниже. В полуавтоматическом режиме передача переключается не только водителем, при максимальных оборотах коробка автоматически включит большую передачу.
Достоинства и недостатки
Роботизированная трансмиссия является сложной системой. К ее плюсам относят:
- надежный механизм редуктора;
- меньший расход топлива, в сравнении с коробкой автомат;
- необходим небольшой объем трансмиссионного масла — до 4 литров;
- роботы подлежат ремонту, так как в их основе лежит устройство МКПП;
- есть возможность воспользоваться при необходимости полуавтоматическим режимом.
Недостатки указанных агрегатов:
- основная проблема роботизированных трансмиссий — отсутствие возможности перепрошивки процессора с целью задания нового алгоритма управления.

- коробки с электрическим сервоприводом имеют маленькую скорость переключения передач.
- возможность пробуксовки сцепления.
Коробки-робот способны работать продолжительное время при соблюдении условий их эксплуатации. Традиционные роботизированные агрегаты, покажутся несколько медлительными для водителей, предпочитающих экстремальный режим вождения. Усовершенствованные роботизированные трансмиссии позволят достичь максимальной скорости при небольших топливных затратах.
Робот с гармоническим приводом, Робот с планетарной коробкой передач, Робот с редуктором
Почему в роботах используется гармонический редуктор, а не обычный редуктор? Потому что робот требует небольшого размера и высокой точности. Только гармонический редуктор может обеспечить высокую точность, малый зазор, большой коэффициент замедления и малый размер. В соответствии с потребностями гибкости малых и средних роботов гармонические и планетарные редукторы роботов обычно используются на шарнирах роботов.
В соответствии с потребностями гибкости малых и средних роботов гармонические и планетарные редукторы роботов обычно используются на шарнирах роботов.
Что такое коробка передач в роботе?
Коробка передач робототехники является частью суставов манипуляторов роботов. Соединения обеспечивают маневренность, а коробки передач определяют скорость и направление движения. Они являются связующим звеном между двигателем, который обеспечивает приводную энергию, и компонентом машины, задачей которого является выполнение запланированного движения.
Как работает роботизированная коробка передач?
Передаточное отношение редуктора гармонического привода больше, чем у обычного редуктора. Поскольку количество зубьев зацепления велико, его грузоподъемность и передача очень высоки; диапазон мощности от нескольких ватт до нескольких десятков киловатт, при этом он не оказывает воздействия и шума; Гармонический редуктор может создать пространственный механизм для передачи движения и мощности, такой как герметизация устройств замедления передачи гармоник, и приводит в действие пространственные механизмы, работающие в вакууме, коррозии и других вредных средах; в дополнение к этому также можно использовать гармоническую передачу. Реализовать высокоскоростное движение, такое как ручные генераторы, ветряные турбины, и удобную реализацию дифференциальной передачи.
Реализовать высокоскоростное движение, такое как ручные генераторы, ветряные турбины, и удобную реализацию дифференциальной передачи.
Конструкция коробки передач робота
От 60% до 70% вращающихся соединений робота используют гармонические шестерни. Механизм гармонической зубчатой передачи состоит из трех основных частей: жесткой шестерни, генератора гармоник и гибкой шестерни. При работе жесткая шестерня установлена неподвижно, каждый зуб равномерно распределен по окружности, а гибкая шестерня с внешней формой зуба вращается вдоль внутренних зубьев жесткой шестерни. Гибкая шестерня имеет на два зуба меньше, чем жесткая, поэтому гибкая шестерня поворачивается на соответствующий угол двух зубьев в противоположном направлении за каждый оборот жесткой шестерни. Генератор гармоник имеет эллиптический профиль, и шарики, установленные на генераторе гармоник, используются для поддержки гибкой шестерни, а генератор гармоник приводит гибкую шестерню во вращение и придает ей пластическую форму. При вращении только несколько зубьев эллиптического конца гибкой шестерни входят в зацепление с жесткой шестерней. Только так гибкая шестерня может свободно поворачиваться на определенный угол относительно жесткой шестерни.
При вращении только несколько зубьев эллиптического конца гибкой шестерни входят в зацепление с жесткой шестерней. Только так гибкая шестерня может свободно поворачиваться на определенный угол относительно жесткой шестерни.
Редуктор манипулятора робота
Характеристики планетарных редукторов и гармонических приводов для роботов Laifual в робототехнике
Являясь профессиональным производителем планетарных редукторов для роботов, наши редукторы с гармоническим и планетарным приводом обладают такими преимуществами, как легкий вес, свободный зазор между шестернями и высокий крутящий момент. и т. д. Они могут широко использоваться в промышленных роботах, имитационных роботах, устройствах для производства полупроводниковых жидких кристаллов, фотогальваническом оборудовании, оптических инструментах, прецизионных станках и других роботизированных передовых областях.
Для получения дополнительной информации о планетарном редукторе робота, пожалуйста, свяжитесь с нами!
Крошечный редуктор с магнитным приводом, повышающий мощность микророботов
Боб Йирка, Tech Xplore
Конструкция и характеристики миниатюрного редуктора с магнитным приводом для магнитных приводов миллиметрового масштаба. Кредит: Научная робототехника (2022). DOI: 10.1126/scirobotics.abo4401
Кредит: Научная робототехника (2022). DOI: 10.1126/scirobotics.abo4401Группа исследователей из Института интеллектуальных систем им. Макса Планка совместно с парой коллег из Харбинского технологического института разработала крошечный приводной редуктор, который можно использовать для увеличения мощности очень крошечных роботов. В своей статье, опубликованной в журнале Science Robotics, , группа описывает, как работает их коробка передач, и улучшения мощности, наблюдаемые в нескольких типах крошечных роботов.
В течение последних нескольких лет ученые работали над созданием крошечных роботов, которых можно было бы вводить в тело человека для проведения медицинских процедур. Есть надежда, что таких роботов можно будет отправить, например, на поиск и уничтожение раковых опухолей. Такие крошечные роботы слишком малы, чтобы нести собственную силовую установку; таким образом, ими необходимо управлять с помощью внешнего магнитного поля.
Редуктор поставляется с магнитом на конце, чтобы использовать мощность магнитного поля через шестерни в коробке. А коробка передач способна увеличить мощность робота, используя продуманные функции, в том числе эластичные компоненты и механические связи.
Чтобы использовать коробку передач, крошечные роботы должны быть сконструированы таким образом, чтобы использовать их преимущества.
Чтобы проверить свою идею, исследователи построили коробчатые конструкции с эластичными стенками, которые медленно сжимались коробкой передач под воздействием магнитного поля. Механическая связь удерживала стены на месте, позволяя нарастать давлению. Когда достигалось определенное давление, стены освобождались, толкая робота в нужном направлении. Чтобы создать робота, несколько коробчатых конструкций соединили вместе. Используя этот подход, исследователи смогли создать роботов лебедочного типа, способных поднимать до 103 граммов, или прыгунов, достигающих 119 граммов.миллиметры. Они также создали гусеницы и фиксаторы.
Дополнительная информация: Чонг Хонг и др.