Кривошипно-шатунный механизм
Кривошипно-шатунный механизм (КШМ) предназначен для преобразования тепловой энергии давления сгоревших газов в механическую работу, т.е. создавая вращение коленчатого вала. Конструкция КШМ состоит из поршней с шатунами, которые соединены с коленчатым валом. Во время работы двигателя, поршни двигаются в гильзах цилиндров.
Принцип действия кривошипно-шатунного механизма
Давление газа, возникающее во время сгорания топлива, заставляет двигаться поршень по возвратно-поступательной траектории, передавая усилие на шатун.
По своей конструкции, поршень состоит из юбки и головки. Головка может быть выполнена различной формы: вогнутая, выпуклая, плоская. В ней также есть специальные канавки, в которые устанавливаются кольца. В настоящее время, на двигателях устанавливаются два различных типа колец. Первые компрессионные, вторые — маслосъемные. Компрессионные кольца предотвращают попадание газов в картер.
Для передачи усилия от поршня к коленчатому валу, на шатуне предусмотрены шарнирные соединения. Материалом для изготовления шатуна является высокопрочная сталь. Для автомобилей, предназначенных для гонок, шатуны изготавливаются из титанового сплава.
Конструкция шатуна представляет собой верхнюю, нижнюю головки и стержня. В верхней головке устанавливается поршневой палец. Он называется «плавающим». Нижняя головка — разборная, благодаря чему она крепиться к шейке коленчатого вала.
Поступающие усилия к коленчатому валу, заставляют его вращаться. Для изготовления этого элемента двигателя применяется сталь или чугун. В конструкцию коленчатого вала входят несколько элементов, среди которых шатунные и коренные рейки.
На конце коленвала расположен маховик. В современных автомобилях часто устанавливаются двухмассовые маховики. Конструктивно они представляют собой два соединенных между собой диска. Запуск двигателя осуществляется благодаря вращению зубчатого венца маховика, благодаря передаче усилия от стартера.
Чтобы в двигателе не возникало крутильных колебаний, проявляюшихся чередующимися раскручиваниями и закручиваниями коленчатого вала, на обратной его стороне располагается гаситель колебаний. Конструктивно он представляет собой два металлических кольца, между которыми располагается вязкое масло или эластомер. Внешняя сторона гасителя соединена с ременным шкивом.
Вместе, шатун, гильза цилиндра и поршень образуют цилиндро-поршневую группу. В зависимости от модели, в двигателе может быть от одного до шестнадцати цилиндров.
В зависимости от расположения цилиндров в двигателе, может быть несколько вариантов компоновочной схемы:
- Рядная. При таком расположении, оси цилиндров расположены на одной линии.
- V-образная — оси цилиндров расположены в двух плоскостях;
- Оппозитная (оси расположены на 180° по отношению к друг-другу;
- VR — оси расположены под незначительным углом к друг-другу;
- W-образная. В данном случае, предусмотрены две схемы VR, которые установлены с небольшим смещением на одном валу.
В зависимости от типа компоновочной системы, определяется уровень балансировки двигателя. Лучшим в этом плане, является двигатель, имеющий оппозитное расположение цилиндров.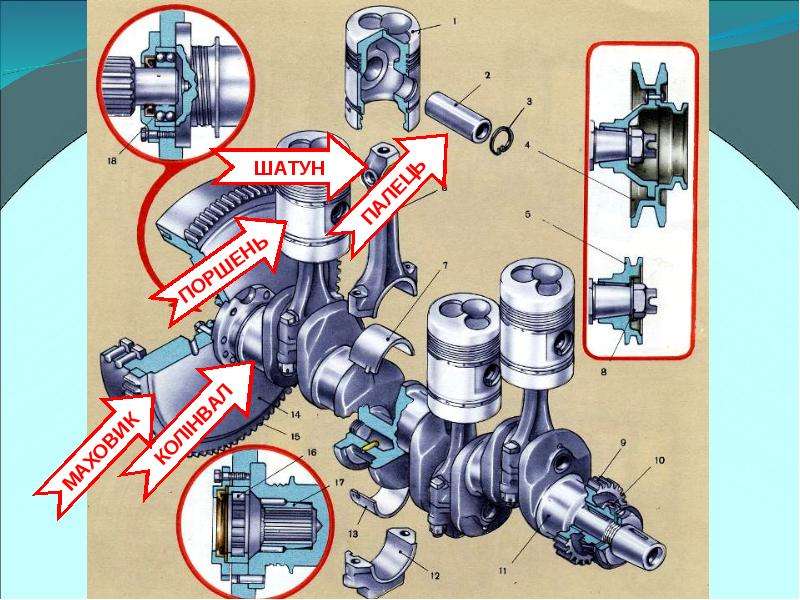 Хорошо сбалансирован и двигатель с четырехцилиндровой рядной системой. В V-образном двигателе, наилучшие показатели балансировки достигаются путем расположения цилиндров по отношению друг к другу под углами 120° и 60°.
Хорошо сбалансирован и двигатель с четырехцилиндровой рядной системой. В V-образном двигателе, наилучшие показатели балансировки достигаются путем расположения цилиндров по отношению друг к другу под углами 120° и 60°.
Специально для снижения уровня возникающих во время работы двигателя вибраций, в масляном поддоне располагаются специальные балансировочные валы, непосредственно под коленчатым валом.
Работа кривошипно-шатунного механизма
Как авторитетно свидетельствуют историки техники, еще за много лет до того, как появился самый первый автомобиль, был изобретен
Еще задолго до того, как был изобретен двигатель внутреннего сгорания, задача преобразования возвратно-поступательного движения в движение вращательное была весьма актуальна. Например, без ее эффективного решения не могла функционировать паровая машина, которая послужила настоящим «локомотивом» промышленной революции. Способ преобразования движения поршней во вращение был изобретен еще в средине XVIII века, и именно он был взят за основу двигателей внутреннего сгорания.
Например, без ее эффективного решения не могла функционировать паровая машина, которая послужила настоящим «локомотивом» промышленной революции. Способ преобразования движения поршней во вращение был изобретен еще в средине XVIII века, и именно он был взят за основу двигателей внутреннего сгорания.
Интересно, что с тех пор, как появились первые ДВС, прошло уже очень немало времени. Они претерпели массу изменений, однако кривошипно-шатунный механизм в них остался практически таким же, как и был изначально.
Что касается принципа его действия, то он основан на том, что некие детали (а именно – поршни), с помощью шарниров соединяются с некоторыми частями вала, представляющими собой его «ступени». Сами поршни совершают возвратно-поступательные движения, благодаря чему оказывают соответствующие механические нагрузки на «колена» вала. Последний в результате этого совершает вращательное движение.
Таким образом, та задача, которую решет кривошипно-шатунный механизм, состоит в том, чтобы возвратно-поступательное движение поршней преобразовать во вращательное движение коленчатого вала. Что касается конструкции, то все детали кривошипно-шатунного механизма можно разделить на две категории: неподвижные подвижные.
Что касается конструкции, то все детали кривошипно-шатунного механизма можно разделить на две категории: неподвижные подвижные.
Шатун и коленчатый вал
Роль шатуна состоит в том, чтобы обеспечивать трансляцию того усилия, которое обеспечивает поршень, коленчатому валу, причем как при рабочем, так и при обратном ходе во время вспомогательных тактов. Его составными частями являются стержень двутаврового сечения, верхняя головка и разъемная нижняя головка, которая закрепляется на шатунной шейке коленчатого вала. Материалом для изготовления шатуна и крышки является углеродистая или легированная сталь. В конструкции верхней головки шатуна содержится одна или две втулки, которые в нее запрессовываются и изготавливаются из такого материала, как оловянистая бронза.
Между собой верхняя и нижняя головки шатуна соединяются парой болтов и гаек, причем для обеспечения надежности фиксации они или снабжаются контргайками, или же шплинтуются.
Коленвал, который воспринимает оказываемые на него усилия поршней посредством шатунов, преобразует их во вращение. На нем располагаются шатунные и коренные шейки, противовесы, фланец, маховик. На коленчатых валах некоторых двигателей внутреннего сгорания устанавливается также храповик. Кроме того, на коленвалах монтируются шкивы приводов вентилятора и водяного насоса.
Коленчатые валы двигателей современных автомобилей вращаются со скоростью от 3000 до 6000 оборотов в минуту. Поэтому коренные подшипники, в которых они закрепляются, испытывают ускоренный износ. Чтобы его уменьшить, применяются специальные противовесы.
СИЛОВОЙ АНАЛИЗ ПОРШНЕВОГО ДВИГАТЕЛЯ С ИСПОЛЬЗОВАНИЕМ ДИНАМИЧЕСКИХ МОДЕЛЕЙ КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА
Полная библиографическая ссылка: Яманин А. И. СИЛОВОЙ АНАЛИЗ ПОРШНЕВОГО ДВИГАТЕЛЯ С ИСПОЛЬЗОВАНИЕМ ДИНАМИЧЕСКИХ МОДЕЛЕЙ КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА / Александр Иванович Яманин, Владимир Анатольевич Жуков, Сергей Олегович Барышников // Вестник Государственного университета морского и речного флота имени адмирала С. О. Макарова. — 2018. — №1(47). — C. 191-200. DOI: 10.21821/2309-5180-2018-10-1-191-200
И. СИЛОВОЙ АНАЛИЗ ПОРШНЕВОГО ДВИГАТЕЛЯ С ИСПОЛЬЗОВАНИЕМ ДИНАМИЧЕСКИХ МОДЕЛЕЙ КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА / Александр Иванович Яманин, Владимир Анатольевич Жуков, Сергей Олегович Барышников // Вестник Государственного университета морского и речного флота имени адмирала С. О. Макарова. — 2018. — №1(47). — C. 191-200. DOI: 10.21821/2309-5180-2018-10-1-191-200
СИЛОВОЙ АНАЛИЗ ПОРШНЕВОГО ДВИГАТЕЛЯ С ИСПОЛЬЗОВАНИЕМ ДИНАМИЧЕСКИХ МОДЕЛЕЙ КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА
АннотацияТребуемый уровень надежности современных форсированных двигателей может быть обеспечен лишь при условии их качественного проектирования, в основе которого лежат прочностные расчеты наиболее нагруженных деталей, к которым относятся детали кривошипно-шатунного механизма. В статье показана важность кинематического и динамического анализа кривошипно-шатунного механизма в процессе проектирования двигателя внутреннего сгорания и его роль в обеспечении надежности двигателя, описаны способы решения задачи кинематического и динамического анализа кривошипно-шатунного механизма.

кривошипно-шатунный механизм, статическая модель шатуна, динамическая модель шатуна, силовой анализ, численный расчет, векторные диаграммы нагрузок
Читать полный текст статьи: PDFСписок литературыЧайнов Н. Д. Конструирование двигателей внутреннего сгорания / Н. Д. Чайнов, Н. А. Иващенко, А. Н. Краснокутский, Л. Л. Мягков. — М.: Машиностроение, 2008. — 496 с.
Яманин А. И. Компьютерно-информационные технологии в двигателестроении / А. И. Яманин. — М.: Машиностроение, 2005. — 480 с.
Безюков О. К. Состояние и перспективы судового двигателестроения в России / О. К. Безюков, В. А. Жуков // Вестник Астраханского государственного технического университета. Серия: Морская техника и технология. — 2017. — № 2. — С. 40-53. DOI: 10.24143/2073-1574-2017-2-40-53.
К. Безюков, В. А. Жуков // Вестник Астраханского государственного технического университета. Серия: Морская техника и технология. — 2017. — № 2. — С. 40-53. DOI: 10.24143/2073-1574-2017-2-40-53.
Горобцов A. С. Расчетные задачи динамики систем твердых и упругих тел в программном комплексе ФРУНД / А. С. Горобцов, С. В. Солоденков // Машиностроение и инженерное образование. — 2008. — № 4. — С. 31-38.
Истомин П. А. Динамика судовых двигателей внутреннего сгорания / П. А. Истомин. — Л.: Судостроение, 1966. — 280 с.
Истомин П. А. Динамические модели кривошипно-шатунных механизмов и их деталей / П. А. Истомин, М. А. Минасян // Двигателестроение. — 1984. — № 9. — С. 20-24.
Минасян М. А. Особенности динамики ДВС с несимметричными шатунами: дис. … канд. техн. наук / М. А. Минасян. — Л.: ЦНИДИ, 1988. — 262 с.
Платонов К. Ю. Разработка программного обеспечения динамического анализа кривошипно-шатунного механизма поршневых двигателей внутреннего сгорания на переходных режимах / К. Ю. Платонов, П. С. Ширинкин, Р. Н. Хмелев // Альтернативные источники энергии в транспортно-технологическом комплексе: проблемы и перспективы рационального использования. — 2016. — Т. 3. — № 3 (6). — С. 248-252.
Ю. Платонов, П. С. Ширинкин, Р. Н. Хмелев // Альтернативные источники энергии в транспортно-технологическом комплексе: проблемы и перспективы рационального использования. — 2016. — Т. 3. — № 3 (6). — С. 248-252.
Li X. H. Dynamic Analysis of Crank-Connecting Rod-Piston Mechanism of S195 Diesel Engine Based on MATLAB / X. H. Li, X. M. Zhang, X. J. Guo // Applied Mechanics and Materials. — 2014. — Vol. 490-491. — Pp. 992-996. DOI: 10.4028/www.scientific.net/AMM.490-491.992.
Вальехо Мальдонадо П. Р. Реализация процесса проектирования кривошипно-шатунного механизма ДВС в системе AUTODESK INVENTOR / П. Р. Вальехо Мальдонадо, Д. К. Гришин, В. А. Лодня // Вестник Российского университета дружбы народов. Серия: Инженерные исследования. — 2008. — № 2. — С. 85-89.
Яманин А. И. Динамические расчеты поршневых двигателей в среде AUTODESK INVENTOR PROFESSIONAL / А. И. Яманин. — Ярославль: Изд-во ЯГТУ, 2013. — 112 c.
Жуков В. А. Анализ алгоритмов расчета кинематики кривошипно-шатунных механизмов с прицепными шатунами / В. А. Жуков, А. И. Яманин // Вестник Государственного университета морского и речного флота имени адмирала С.О. Макарова. — 2016. — № 2 (36). — С. 109-118. DOI: 10.21821/2309-5180-2016-8-2-109-118.
А. Жуков, А. И. Яманин // Вестник Государственного университета морского и речного флота имени адмирала С.О. Макарова. — 2016. — № 2 (36). — С. 109-118. DOI: 10.21821/2309-5180-2016-8-2-109-118.
Zhang X. M. Dynamic Simulation of Crank-Connecting Rod-Piston Mechanism of Internal Combustion Engine Based on Virtual Prototype Technology / X. M. Zhang, Y. Q. Wang, J. Fang // Applied Mechanics and Materials. — 2012. — Vol. 143-144. Pp. 433-436. DOI: 10.4028/www.scientific.net/AMM.143-144.433.
Liu S. Kinematics and dynamics simulation of a diesel engine’s crank-connecting rod-piston mechanism based on virtual prototype technology [J] / S. Liu, H. Chen, X. Chen, S. Yao // Ship Engineering. — 2006. — Vol. 3. — Pp. 007.
Яманин А. И. Динамический расчет поршневых двигателей в среде Working Model 2D / А. И. Яманин. — Ярославль: Издат. дом ЯГТУ, 2015. — 172 c.
Хозенюк Н. А. К определению нагруженности коренных опор коленчатого вала / Н. А. Хозенюк, А. А. Мыльников, Д. О. Клюканов // Наука в ЮУрГУ: матер.
Яманин Александр Иванович — доктор технических наук, профессор
[email protected]. [email protected]
ФГБОУ ВО «Ярославский государственный технический университет»Жуков Владимир Анатольевич — доктор технических наук, доцент
[email protected]. [email protected]
ФГБОУ ВО «ГУМРФ имени адмирала С.О. Макарова»Барышников Сергей Олегович — доктор технических наук, профессор
ФГБОУ ВО «ГУМРФ имени адмирала С.О. Макарова»детали и запчасти КШМ двигателя
Подобрать запчасти в каталоге «Кривошипношатунный механизм»
Основные компоненты и принцип работы КШМ
Состоит кривошипно-шатунный механизм из таких подвижных деталей и элементов крепежа, как:
- Коленвал
- Поршни с поршневыми кольцами и пальцами
- Шатуны
- Вкладыши, втулки
- Стопорное кольцо
- Крышки
Недвижимыми составляющими данного устройства считаются цилиндры, ГБЦ, блок цилиндров, картер, поддон, прокладка ГБЦ.
В процессе загорания топливно-горючей смеси, оказавшиеся в цилиндрах газы, перемещают поршень в нижнее положение. Благодаря поршневому кольцу шатун может прокручиваться, компенсируя момент прокручивания коленвала при нахождении поршня вверху.
Противовесы не позволяют коленвалу повернуться, поэтому крутящий момент на него подают газы, проходящие сквозь шатун и поршень. Вращают колено латунные подшипники скольжения или шатунные вкладыши. В результате коленвал передает усилие на коробку передач и колеса.
Компрессионные кольца предназначены для обеспечения герметичного состояния и необходимой компрессии в камере сгорания. Для предотвращения проникновения внутрь смазки установлено маслосъемное кольцо, которое снимает остатки масел со стенок цилиндра.
Неисправности кривошипно-шатунного механизма
Так как данный механизм эксплуатируется в чрезвычайно тяжелых условиях при повышенной температуре на высоких скоростных режимах, именно он повреждается первым в системе двигателя. Если возникают неисправности в этом узле, они часто приводят к дорогостоящему ремонту мотора.
Если возникают неисправности в этом узле, они часто приводят к дорогостоящему ремонту мотора.
Причиной неполадок обычно является естественный износ компонентов силового агрегата или нарушение правил его эксплуатации. При несвоевременном проведении техобслуживания, применении низкосортных смазочных материалов, топлива, фильтров, продолжительной эксплуатации перегруженного транспортного средства преждевременно могут возникнуть проблемы в работе кривошипно-шатунного механизма.
Типичными неполадками данного узла считаются:- Изнашивание коренных и шатунных подшипников. Такое повреждение сопровождается приглушенным стуком в блоке цилиндров, который отчетливо слышен при повышении оборотов, также падает давление масла в системе. В подобном случае эксплуатация автотранспортного средства запрещена
- Изнашивание поршней и цилиндров, которое сопровождается звонким гулом при работе непрогретого мотора и возникновением синеватого дыма из выхлопной трубы
- Изнашивание поршневых пальцев.
 Для данной проблемы характерен звонкий стук вверху блока цилиндров при работающем моторе
Для данной проблемы характерен звонкий стук вверху блока цилиндров при работающем моторе - Повреждение и залегание поршневых колец. Оно проявляется перебоями в работе силового агрегата, падением компрессии, повышением расхода масла и появлением синего дыма из выхлопа
Кроме этого со временем на поршнях и на стенках камеры сгорания может появляться нагар, который приводит к сильному нагреванию двигателя, увеличенному расходу топлива и понижению мощности авто.
Чтобы максимально продлить срок службы кривошипно-шатунного механизма следует постоянно контролировать крепления, при необходимости подтягивать болты на картере и ГБЦ, а также содержать мотор в чистоте и периодически удалять нагар, который образуется в камере сгорания.
свидетельство о государственной регистрации программы для ЭВМ — Научно-исследовательский портал Уральского федерального университета
TY — PAT
T1 — Кинематическая модель управления плоским роботом-манипулятором (кривошипно-шатунный механизм)
T2 — свидетельство о государственной регистрации программы для ЭВМ
AU — Берестова, Светлана Александровна
AU — Мамылин, Дмитрий Андреевич
AU — Воронцов, Максим Александрович
PY — 2020/1/17
Y1 — 2020/1/17
N2 — Программа реализует алгоритм плавного движения плоского робота-манипулятора, моделируемого кривошипно-шатунным механизмом. Рабочий инструмент при этом движется по наперед-заданной в полярных координатах гладкой траектории. Позволяет определять и визуализировать положение всех звеньев механизма в любой момент времени и траекторию рабочего инструмента. Выполняет анимацию движения робота-манипулятора с возможностью изменения его геометрических параметров при произвольно заданном законе движения рабочего инструмента. Программа дает возможность визуализировать законы изменения кинематических характеристик, таких как скорость и ускорение рабочего инструмента, а также шарнира, соединяющего кривошип и шатун; угловую скорость и угловое ускорение кривошипа и шатуна. Программа может быть использована в робототехнике при решении задач управления, для определения кинематических и инерционных характеристик звеньев робота-манипулятора, а также в учебном процессе для имитационного моделирования движения плоского робота-манипулятора, определения кинематических характеристик звеньев кривошипно-шатунного механизма. Предназначена для студентов бакалавриата, магистратуры, аспирантов, преподавателей, а также специалистов в области робототехники.
Рабочий инструмент при этом движется по наперед-заданной в полярных координатах гладкой траектории. Позволяет определять и визуализировать положение всех звеньев механизма в любой момент времени и траекторию рабочего инструмента. Выполняет анимацию движения робота-манипулятора с возможностью изменения его геометрических параметров при произвольно заданном законе движения рабочего инструмента. Программа дает возможность визуализировать законы изменения кинематических характеристик, таких как скорость и ускорение рабочего инструмента, а также шарнира, соединяющего кривошип и шатун; угловую скорость и угловое ускорение кривошипа и шатуна. Программа может быть использована в робототехнике при решении задач управления, для определения кинематических и инерционных характеристик звеньев робота-манипулятора, а также в учебном процессе для имитационного моделирования движения плоского робота-манипулятора, определения кинематических характеристик звеньев кривошипно-шатунного механизма. Предназначена для студентов бакалавриата, магистратуры, аспирантов, преподавателей, а также специалистов в области робототехники. Тип ЭВМ: IBM РC — совмест. ПК. ОС: Windows.
Тип ЭВМ: IBM РC — совмест. ПК. ОС: Windows.
AB — Программа реализует алгоритм плавного движения плоского робота-манипулятора, моделируемого кривошипно-шатунным механизмом. Рабочий инструмент при этом движется по наперед-заданной в полярных координатах гладкой траектории. Позволяет определять и визуализировать положение всех звеньев механизма в любой момент времени и траекторию рабочего инструмента. Выполняет анимацию движения робота-манипулятора с возможностью изменения его геометрических параметров при произвольно заданном законе движения рабочего инструмента. Программа дает возможность визуализировать законы изменения кинематических характеристик, таких как скорость и ускорение рабочего инструмента, а также шарнира, соединяющего кривошип и шатун; угловую скорость и угловое ускорение кривошипа и шатуна. Программа может быть использована в робототехнике при решении задач управления, для определения кинематических и инерционных характеристик звеньев робота-манипулятора, а также в учебном процессе для имитационного моделирования движения плоского робота-манипулятора, определения кинематических характеристик звеньев кривошипно-шатунного механизма. Предназначена для студентов бакалавриата, магистратуры, аспирантов, преподавателей, а также специалистов в области робототехники. Тип ЭВМ: IBM РC — совмест. ПК. ОС: Windows.
UR — https://www.elibrary.ru/item.asp?id=42497422
M3 — Патент
M1 — 2020610626
Y2 — 2019/12/30
PB — Федеральный институт промышленной собственности
ER —
Кривошипно-шатунный механизм (КШМ). Маятник Капицы » РобоВики
Данная статья является вводной теорией к занятию по робототехнике «Кривошипно-шатунный механизм из Lego EV3″
Первые КШМПервые упоминания об использовании кривошипно-шатунного механизма можно отнести ко временам Древнего Рима (примерно III век н.э.). Машина для распиливания каменных блоков передавала вращение от водяного колеса с помощью зубчатой передачи на кривошипно-шатунный механизм, который преобразовывал вращательное движение в возвратно-поступательное движение полотна пилы. Также такие устройства могли использоваться на древних лесопилках.
Схема водяного древнеримского распиловочного станка с КШМБольшого распространения такие машины не получили – деревянные части из-за большого количества трущихся деталей быстро изнашивались и требовали частого ремонта, а рабский труд был намного дешевле и не требовал большой квалификации рабочих.
В XVI веке кривошипно-шатунный механизм появился на деревянных самопрялках. Самопрялка – это ручной станок для прядения нити из шерсти, состоящий из двух катушек. В самопрялке для скручивания нити использовался принцип ременной передачи. Раньше большую катушку приходилось раскручивать рукой. К самопрялке добавили педаль. Нажимая ногой на педаль, работник смог раскручивать катушку без использования рук. Этот механизм упростил работу и позволил за то же время производить больше пряжи. В данном устройстве возвратно-поступательное движение педали передавалось через деревянный шатун на кривошип и преобразовывалось во вращательное движение большой катушки (шкива).
Самопрялка с педалью и КШМ позволяла освободить руки и сделать работу более производительнойКШМ в паровых машинах
Начиная с начала XVIII века большую популярность среди изобретателей и ученых начинают получать паровые машины. Первый паровой двигатель для водяного насоса построил в 1705 году английский изобретатель Томас Ньюкомен для выкачивания воды из глубоких шахт.
Позднее устройство парового двигателя было усовершенствовано шотландским инженером и механиком Джеймсом Уаттом (1736-1819). Кстати, именно Джеймс Уатт ввел в оборот термин «лошадиная сила», а его именем назвали единицу мощности Ватт. Паровая машина Уатта получила сложную систему связанных тяг, а планетарная зубчатая передача преобразовывала возвратно-поступательное движение поршня во вращательное движение маховика (большого тяжелого колеса). Данная паровая машина стала универсальной, так как в отличие от машины Ньюкомена поршень имел рабочий ход в обе стороны. Машина Уатта получила широкое распространение на ткацких фабриках, в металлургии, при строительстве первых паровозов для железных дорог XVIII века.
Паровая машина Джеймса Уатта. Вместо кривошипа — сложная планетарная зубчатая передачаШотландский изобретатель Джеймс Уатт (James Watt)Нужно сказать, что паровыми машинами занимались в те времена очень многие изобретатели. Так, в Российской Империи свою двухцилиндровую паровую машину изобрел инженер Иван Иванович Ползунов (1728-1766).
В XIX веке паровую машину Уатта упростили, заменив сложный планетарный механизм на кривошипно-шатунный механизм.
Паровая машина с кривошипно-шатунным механизмомСхема паровой машины с кривошипно-шатунным механизмомПаровая машина с КШМ нашла широкое применение при строительстве первых автомобилей на паровой тяге и паровозов, перевозящих грузы по железной дороге.
ПаровозКШМ в двигателях внутреннего сгоранияДо этого мы рассматривали использование кривошипно-шатунного механизма в паровых двигателях. В паровом двигателе топливо сгорает в печи (вне цилиндра) и нагревает водяной котел, и уже водяной пар в цилиндре толкает поршень.
В двигателе внутреннего сгорания топливная смесь (воздух + газ, или воздух + бензин и т.д.) поджигается внутри цилиндра и продукты горения толкают поршень. Сокращенно такие двигатели называют ДВС.
Первый одноцилиндровый ДВС на газовом топливе построил в 1860 году в Париже французский изобретатель Жан Ленуар.
Двигатель внутреннего сгорания Жана Ленуара (внешне очень похож на паровую машину)Однако широкое применение двигатели внутреннего сгорания нашли в конце XIX века после получения керосина и бензина из нефти. Появление жидкого топлива позволило создать экономичные двигатели небольшой массы, которые можно было использовать для привода транспортных машин.
В 1881-1885 гг. российский изобретатель Огнеслав Костович сконструировал и построил в России восьмицилиндровый двигатель мощностью 59 кВт.
Двигатель внутреннего сгорания Огнеслава КостовичаВ 1897 г. немецким инженером Рудольфом Дизелем был спроектирован и построен первый двигатель с воспламенением от сжатия. Это был компрессорный двигатель, работающий на керосине, впрыскиваемом в цилиндр при помощи сжатого воздуха.
Рудольф Дизель и его двигатель внутреннего сгоранияВсе эти ДВС имели схожие черты и использовали кривошипно-шатунный механизм для преобразования возвратно-поступательного движения поршня во вращательное движение коленвала.
Давайте посмотрим на схему устройства современного двигателя внутреннего сгорания.
Схема кривошипно-шатунного механизма в двигателе внутреннего сгоранияОбщие определения:
Поршень совершает возвратно-поступательное движение вдоль цилиндра – он ходит вверх и вниз.
Шатун – деталь, связывающая кривошип и поршень.
Кривошип – условная деталь, которая связывает шатун с коленвалом.
Противовес снижает вибрации при вращении коленвала.
Блок цилиндров – корпус, в котором находятся цилиндры двигателя.
Поршневой палец – цилиндрическая деталь, ось вращения шатуна относительно поршня.
Коленвал (коленчатый вал) – ось вращения ступенчатой формы.
Верхняя мертвая точка – крайнее верхнее положение поршня, где меняется направление его движения.
Нижняя мертвая точка — крайнее нижнее положение поршня, где меняется направление его движения.
Ход поршня — расстояние между крайними положениями поршня. Равно удвоенному радиусу кривошипа.
Блок цилиндров, поршень с шатуном и коленвалВидео:
- Старинная русская прялка с кривошипно-шатунным механизмом
- Паровая машина. Джеймс Уатт
- Принцип работы противовесов
Литература:
- КИНЕМАТИКА И ДИНАМИКА КРИВОШИПНОШАТУННОГО МЕХАНИЗМА ПОРШНЕВЫХ ДВИГАТЕЛЕЙ
Обычный маятник, если перевернуть его кверху ногами, неустойчив. Для него крайне трудно найти верхнюю точку равновесия. Но если совершать быстрые вертикальные возвратно-поступательные колебания, то положение такого маятника становится устойчивым.
Петр Леонидович КапицаСоветский академик и нобелевский лауреат по физике Петр Леонидович Капица (1894 — 1984) использовал модель маятника с вибрирующим подвесом для построения новой теории, которая описывала эффекты стабилизации тел или частиц. Работа Капицы по стабилизации маятника была опубликована в 1951 году, а сама модель получила название «маятник Капицы». Более того, было открыто новое направление в физике — вибрационная механика. Данная модель позволила наглядно показать возможности высокочастотной электромагнитной стабилизации пучка заряженных частиц в ускорителях.
Владимир Игоревич АрнольдДругой советский математик и академик Владимир Игоревич Арнольд (1937-2010), который был заместителем Капицы, вспоминал его слова:
«Он (Капица — примечание) сказал: «Вот смотрите — когда придумывается какая-то физическая теория, то прежде всего надо сделать маленький какой-нибудь прибор, на котором его наглядно можно было-бы продемонстрировать кому угодно. Например, Будкер и Векслер хотят делать ускорители на очень сложной системе. Но я посмотрел, что уравнения, которые говорят об устойчивости этого пучка, означают, что если маятник перевернут кверху ногами, он обычно неустойчив, падает. Но если точка подвеса совершает быстрые вертикальные колебания, то он становится устойчивым. В то время как ускоритель стоит много миллионов, а этот маятник можно очень легко сделать. Я его сделал на базе швейной электрической машинки, он вот здесь стоит». Он нас отвел в соседнюю комнату и показал этот стоящий вертикально маятник на базе швейной машинки».
Демонстрация динамической стабилизации перевернутого маятника с помощью электробритвыУ математика Арнольда не было своей швейной машинки, и он огорчился. Но у него была электробритва «Нева», из которой и был собран перевернутый маятник. К сожалению, в первой конструкции маятник падал. Тогда Арнольд вывел формулу и увидел, что длина маятника не должна быть больше 12 сантиметров. Известный математик укоротил подвес до 11 сантиметров и все получилось.
Давайте посмотрим, какие силы действуют на «маятник Капицы». После прохождения верхней мертвой точки подвес маятника начинает тянуть грузик вниз. После прохождения нижней мертвой точки подвес толкает грузик вверх. Так как углы вежду векторами сил в верхней и нижней точке разные, то сумма их векторов дает силу, направленную к оси вертикальных колебаний маятника. Если эта сила больше силы тяжести, то верхнее положение маятника становится устойчивым.
А эта формула описывает взаимосвязь частоты вибраций подвеса, амплитуды колебаний и длины жесткого подвеса.
Видео:
- GetAClass. Маятник Капицы
- Маятник Капицы: диалог академика Арнольда и Капицы, вывод формулы
Кривошипно-шатунный пресс. Разновидности.
В сфере металлообработки для получения различных изделий методом штамповки используется кривошипно-шатунный пресс. Наиболее распространены прессы марки КД, которые отличаются высокой производительностью и надежностью.
В кривошипно-шатунном прессе принцип работы заключается в преобразовании поступательных движений во вращательные. Для изготовления кривошипно-шатунных механизмов всегда используется закаленная сталь, обладающая наивысшим качеством. Рабочие поверхности дополнительно подвергаются закалке и роликовой накатке. Именно поэтому любой кривошипный пресс обладает высокой прочностью и надежностью валовых шеек. Для вращения валков используются подшипники скольжения, оснащенные вкладышами из бронзы.
Кривошипно-шатунные прессы бывают механические и автоматические.
Благодаря этому всегда есть возможность подобрать оптимальное техническое средство для любого производства.
В Интернете можно найти немало объявлений о продаже кривошипного пресса. При этом далеко не каждый продавец назначает реальную стоимость. Стоит отметить, что область применения кривошипных прессов достаточно узкая. Соответственно, основная доля предложений о продаже выставляется посредниками, которые накручивают цену. Но от переплаты можно защититься. Тот факт, что Вы находитесь на этом сайте, говорит о том, что Вы искали оборудование данного класса. Вы сможете приобрести его здесь по минимальной стоимости и без каких-либо наценок. Основная часть моделей есть в наличии и дожидается покупателей на складе.
Покупать бывший в употреблении кривошипно-шатунный пресс по завышенной цене, учитывая еще то, что он был в употреблении, нецелесообразно. Конечно, данный класс устройств обладает повышенной прочностью и надежностью, и даже отработавший несколько лет на производстве пресс сможет послужить новому хозяину. Но зачем покупать подержанный механизм, если за эти же деньги можно приобрести новое устройство? Обратите внимание на цены, по которым мы продаем кривошипно-шатунные прессы. Для оформления заказа осталось совсем немного: выбрать модель и оформить заявку.
Кривошип (механизм) | История Вики
Кривошип представляет собой рычаг, прикрепленный под прямым углом к вращающемуся валу, посредством которого возвратно-поступательное движение передается на вал или принимается от него. Он используется для преобразования кругового движения в возвратно-поступательное или возвратно-поступательное в круговое движение. Рычаг может быть изогнутой частью вала или отдельным рычагом, прикрепленным к нему. К концу кривошипа шарниром прикреплен стержень, обычно называемый шатуном. Конец стержня, прикрепленный к кривошипу, совершает круговое движение, в то время как другой конец обычно вынужден двигаться линейным скользящим движением внутрь и наружу.
Термин часто относится к кривошипу, приводимому в действие человеком, который используется для ручного поворота оси, как в шатуне велосипеда или в сверле со скобами и сверлами. В этом случае рука или нога человека служит шатуном, прикладывая возвратно-поступательное усилие к кривошипу. Часто есть штанга, перпендикулярная другому концу руки, часто со свободно вращающейся ручкой на ней, чтобы держать ее в руке, или в случае работы ногой (обычно со второй рукой для другой ноги) с свободно вращающаяся педаль.
Файл: Bundesarchiv Bild 135-BB-152-11, Tibetexpedition, Tibeter mit Handmühle.jpgТибетцы, управляющие кверном (1938). Перпендикулярная ручка таких вращающихся ручных фрез работает как кривошип. [1] [2]
Эксцентричный кривошипно-подобный механизм появился в Китае с 4 века до нашей эры. [3] Ручные кривошипы использовались во времена династии Хань (202 г. до н.э. — 220 г. н.э.), как изображают модели глазурованных гробниц эпохи Хань из I века до н.э., и впоследствии использовались в Китае для наматывания шелка и прядение конопли, для веялки сельскохозяйственных культур, в водяном просеивателе муки, для металлургических сильфонов с гидравлическим приводом и в лебедке колодца. [4] [5] Самое раннее использование кривошипа в машине произошло в веялке с кривошипным приводом в провинции Хань, Китай. [6]
Римская железная рукоятка для кривошипа была обнаружена при раскопках в Августе Раурика, Швейцария. Изделие длиной 82,5 см с ручкой длиной 15 см имеет еще неизвестное назначение и датируется не позднее прибл. 250 г. н.э. [7] Свидетельства о наличии кривошипа появляются на лесопилке в позднем Иераполе (Малая Азия) 3-го века, в то время как две каменные лесопилки 6-го века также были найдены в Эфесе, Малая Азия, и Герасе, Иордания. [8] В Китае в 5 веке появились кривошипно-шатунные механизмы, а в 6-м веке — кривошипно-шатунные механизмы со штоком поршня. [3]
Устройство, показанное в каролингской рукописи начала 9 века Утрехтская Псалтырь , представляет собой кривошипную рукоятку, используемую с вращающимся точильным камнем. [9] Ученые указывают на использование кривошипных рукояток в трепанационных сверлах в работе 10 века испанского хирурга-мусульманина Абу аль-Касима аль-Захрави (936–1013). [9] Бенедиктинский монах Феофил Пресвитер (ок. 1070–1125) описал кривошипные рукоятки, «используемые для токарной обработки литейных стержней», согласно Нидхэму. [10]
В мусульманском мире немеханический кривошип появляется в середине 9 века в нескольких гидравлических устройствах, описанных братьями Бану Муса в их «Книге изобретательных устройств » . [11] Эти автоматически приводимые в действие кривошипы используются в нескольких устройствах, описанных в книге, два из которых имеют действие, приближенное к коленчатому валу.Автоматический кривошип братьев Бану Муса не позволил бы полностью вращаться, но потребовалась лишь небольшая модификация, чтобы преобразовать его в коленчатый вал. [12] Арабский изобретатель Аль-Джазари (1136–1206) описал кривошипно-шатунную систему вращающейся машины в двух своих водоподъемных машинах. [13] Его двухцилиндровый насос включал в себя самый ранний известный коленчатый вал, [14] , в то время как его другая машина была оснащена первым известным кривошипно-скользящим механизмом. [15] Итальянский врач и изобретатель Гвидо да Виджевано (ок.1280–1349) сделал иллюстрации для гребных лодок и боевых экипажей, приводимых в движение вручную проворачиваемыми коленчатыми валами и зубчатыми колесами. [16] Кривошип стал обычным явлением в Европе к началу 15 века, о чем свидетельствуют работы таких людей, как военный инженер Конрад Кезер (1366 — после 1405). [16]
Шатуны раньше использовались на некоторых машинах в начале 20 века; например, почти все фонографы до 1930-х годов приводились в действие часовыми двигателями с заводными рукоятками, а автомобильные двигатели внутреннего сгорания обычно запускались кривошипами (известные в Великобритании как стартовые ручки , ), до того, как электрические стартеры стали широко использоваться.
Файл: Преобразование вращательного движения в линейное. Crank.jpgКривошип
Файл: CrankPencilShapener.jpgРучной кривошип на точилке для карандашей
К знакомым примерам относятся:
Используя руку [править | править источник]
Использование ног [править | править источник]
Двигатели[править | править источник]
Почти все поршневые двигатели используют кривошипы для преобразования возвратно-поступательного движения поршней во вращательное движение. Кривошипы встроены в коленчатый вал.
Смещение конца шатуна приблизительно пропорционально косинусу угла поворота кривошипа, когда он измеряется от верхней мертвой точки. Таким образом, возвратно-поступательное движение, создаваемое стабильно вращающимся кривошипом и шатуном, приблизительно представляет собой простое гармоническое движение:
где x — расстояние конца шатуна от оси кривошипа, l — длина шатуна, r — длина кривошипа, а α — угол поворота кривошипа, измеренный от верхней мертвой точки (ВМТ).Технически возвратно-поступательное движение шатуна немного отличается от синусоидального движения из-за изменения угла шатуна во время цикла.
Механическое преимущество кривошипа, соотношение между силой на шатуне и крутящим моментом на валу, изменяется на протяжении цикла кривошипа. Отношения между ними примерно:
где — крутящий момент, а F — сила на шатуне.Для заданного усилия на кривошипе крутящий момент максимален при углах поворота кривошипа α = 90 ° или 270 ° от ВМТ. Когда кривошип приводится в движение шатуном, проблема возникает, когда кривошип находится в верхней мертвой точке (0 °) или нижней мертвой точке (180 °). В этих точках цикла кривошипа сила на шатуне не вызывает крутящего момента на кривошипе. Следовательно, если кривошип неподвижен и оказывается в одной из этих двух точек, он не может быть запущен с помощью шатуна. По этой причине в паровозах, колеса которых приводятся в движение кривошипами, два шатуна прикреплены к колесам на расстоянии 90 ° друг от друга, так что независимо от положения колес при запуске двигателя, по крайней мере, один шатун будет иметь возможность приложить крутящий момент для запуска поезда.
- ↑ Ritti, Grewe & Kessener 2007, стр. 159
- ↑ Лукас 2005, стр. 5, сл. 9
- ↑ 3,0 3,1 Джозеф Нидхэм (1975), «История и человеческие ценности: китайский взгляд на мировую науку и технологии», Философия и социальные действия II (1-2): 1-33 [ 4], http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.122.293&rep=rep1&type=pdf#page=12, получено 13 марта 2010 г.
- ↑ Needham 1986, стр.118–119.
- ↑ Темпл, Роберт. (1986). Гений Китая: 3000 лет науки, открытий и изобретений , стр. 46. С нападающим Джозефом Нидхэмом. Нью-Йорк: Simon and Schuster, Inc. ISBN 0671620282.
- ↑ Н. Сивин (август 1968), «Обзор: Наука и цивилизация в Китае, Джозефа Нидхэма», Журнал азиатских исследований (Ассоциация азиатских исследований) 27 (4): 859-864 [862 ], http://www.jstor.org/stable/2051584
- ↑ Лаур-Беларт 1988, с.51–52, 56, рис. 42
- ↑ Ritti, Grewe & Kessener 2007, стр. 161
- ↑ 9.0 9.1 Needham 1986, p. 112.
- ↑ Нидхэм 1986, стр. 112–113.
- ↑ А. Ф. Л. Бистон, М. Дж. Л. Янг, Дж. Д. Лэтэм, Роберт Бертрам Сержант (1990), Кембриджская история арабской литературы , Cambridge University Press, стр. 266, ISBN 0521327636
- ↑ Бану Муса, Дональд Рутледж Хилл (1979), Книга гениальных устройств (Китаб аль-Чиял) , Springer, стр.23-4, ISBN
- 08339
- ↑ Ахмад И Хасан. Система кривошипно-шатун в непрерывно вращающейся машине.
- ↑ Салли Ганчи, Сара Ганчер (2009), Ислам и наука, медицина и технологии , The Rosen Publishing Group, стр. 41, ISBN 1435850661
- ↑ Лотфи Ромдхан и Саид Зеглул (2010), «Аль-Джазари (1136–1206)», История механизмов и машиноведения (Springer) 7 : 1-21, DOI: 10.1007 / 978-90- 481-2346-9, ISBN 978-90-481-2346-9, ISSN 1875-3442
- ↑ 16.0 16,1 Нидхэм 1986, стр. 113.
Библиография [править | править источник]
- Лукас, Адам Роберт (2005), «Промышленное фрезерование в древнем и средневековом мире. Обзор свидетельств промышленной революции в средневековой Европе», Технология и культура 46 : 1–30
- Laur-Belart, Rudolf (1988), Führer durch Augusta Raurica (5-е изд.), Augst
- Needham, Joseph (1991), Наука и цивилизация в Китае: Том 4, Физика и физические технологии: Часть 2, Машиностроение , Cambridge University Press, ISBN 0521058031 .
- Ritti, Tullia; Греве, Клаус; Кессенер, Пол (2007), «Рельеф водяной каменной пилы на саркофаге в Иераполе и его последствия», Журнал римской археологии 20 : 138–163
Кривошип (механизм) | Трактор и строительный завод Wiki
Кривошип представляет собой рычаг, прикрепленный под прямым углом к вращающемуся валу, посредством которого возвратно-поступательное движение передается на вал или принимается от него. Он используется для преобразования кругового движения в возвратно-поступательное или иногда возвратно-поступательное движение в круговое.Рычаг может быть изогнутой частью вала или отдельным рычагом, прикрепленным к нему. К концу кривошипа шарниром прикреплен стержень, обычно называемый шатуном. Конец стержня, прикрепленный к кривошипу, совершает круговое движение, в то время как другой конец обычно вынужден двигаться линейным скользящим движением внутрь и наружу.
Термин часто относится к кривошипу, приводимому в действие человеком, который используется для ручного поворота оси, как в шатуне велосипеда или в сверле со скобами и сверлами. В этом случае рука или нога человека служит шатуном, прикладывая возвратно-поступательное усилие к кривошипу.Часто есть штанга, перпендикулярная другому концу руки, часто со свободно вращающейся ручкой на ней, чтобы держать ее в руке, или в случае работы ногой (обычно со второй рукой для другой ноги) с свободно вращающаяся педаль.
Примеры
Кривошип
Рукоятка точилки для карандашей
К знакомым примерам относятся:
Ручные рукоятки
Двигатели
Почти все поршневые двигатели используют кривошипы для преобразования возвратно-поступательного движения поршней во вращательное движение.Кривошипы встроены в коленчатый вал.
Механика
Смещение конца шатуна приблизительно пропорционально косинусу угла поворота кривошипа, когда он измеряется от верхней мертвой точки (ВМТ). Таким образом, возвратно-поступательное движение, создаваемое стабильно вращающимся кривошипом и шатуном, приблизительно представляет собой простое гармоническое движение:
где x — расстояние конца шатуна от оси кривошипа, l — длина шатуна, r — длина кривошипа, а α — угол поворота кривошипа, измеренный от верхней мертвой точки (ВМТ).Технически возвратно-поступательное движение шатуна немного отличается от синусоидального движения из-за изменения угла шатуна во время цикла.
Механическое преимущество кривошипа, соотношение между силой на шатуне и крутящим моментом на валу, изменяется на протяжении цикла кривошипа. Отношения между ними примерно:
где — крутящий момент, а F — сила на шатуне.Для заданного усилия на кривошипе крутящий момент максимален при углах поворота кривошипа α = 90 ° или 270 ° от ВМТ. Когда кривошип приводится в движение шатуном, проблема возникает, когда кривошип находится в верхней мертвой точке (0 °) или нижней мертвой точке (180 °). В этих точках цикла кривошипа сила на шатуне не вызывает крутящего момента на кривошипе. Следовательно, если кривошип неподвижен и оказывается в одной из этих двух точек, он не может быть запущен с помощью шатуна. По этой причине в паровозах, колеса которых приводятся в движение кривошипами, два шатуна прикреплены к колесам на расстоянии 90 ° друг от друга, так что независимо от положения колес при запуске двигателя, по крайней мере, один шатун будет иметь возможность приложить крутящий момент для запуска поезда.
История
Западный мир
Классическая античность
- См. Также: Римская технология и Список римских водяных мельниц
Римская кривошипная ручка от Августы Раурика, датированная 2 веком нашей эры [1]
Эксцентрично установленная ручка вращающейся ручной мельницы, появившейся в 5 веке До н.э. кельтиберийская Испания и в конечном итоге распространившаяся по Римской империи представляет собой чудак. [2] [3] [4] Римский чугунный коленчатый вал неизвестного назначения, датируемый II веком нашей эры, был обнаружен при раскопках в Августе Рорика, Швейцария.Кусок длиной 82,5 см на одном конце имеет бронзовую ручку длиной 15 см, другая ручка утрачена. [5] [1]
A ок. В Ашхайме, недалеко от Мюнхена, были раскопаны настоящие железные кривошипы длиной 40 см вместе с парой раздробленных жерновов диаметром 50-65 см и разнообразными железными изделиями. Римская мельница с кривошипным механизмом датируется концом 2 века нашей эры. [6] Часто цитируемая современная реконструкция насоса с ковшовой цепью, приводимого в движение маховиком с ручным приводом с кораблей Nemi, была отклонена как «археологическая фантастика». [7]
Лесопилка в Риме Хиераполис, построенная в 3 веке нашей эры, самая ранняя из известных машин, сочетающая кривошип с шатуном. [8]
Самые ранние свидетельства того, что кривошип, соединенный с шатуном в машине, где-либо в мире, встречается на лесопилке позднего римского Иераполиса 3-го века нашей эры и двух римских каменных лесопилках в Герасе, Римская Сирия, и Эфес, Малая Азия (оба — VI век нашей эры). [8] На фронтоне мельницы Hierapolis показано водяное колесо, питаемое от дорожки мельницы, приводящее в действие через зубчатую передачу две рамные пилы, которые режут прямоугольные блоки с помощью каких-то шатунов и, при необходимости, кривошипов. .Сопроводительная надпись на греческом языке. [9]
Кривошипно-шатунный механизм двух других лесопилок, подтвержденных археологами, работал без зубчатой передачи. [10] [11] В древней литературе мы находим упоминание о работе водных пил по мрамору недалеко от Трира, ныне Германия, автором поэта Авзония конца 4-го века; [8] Примерно в то же время эти типы мельниц, по-видимому, также указаны христианским святым Григорием Нисским из Анатолии, демонстрирующим разнообразное использование гидроэнергии во многих частях Римской империи. [12] Три находит дату изобретения кривошипа и шатуна на целое тысячелетие назад; [8] Впервые все основные компоненты гораздо более позднего парового двигателя были собраны с помощью одной технологической культуры:
С кривошипно-шатунной системой, все элементы для создания парового двигателя (изобретен в 1712 году) — эолипил Героя (генерирующий паровую энергию), цилиндр и поршень (в металлических силовых насосах), обратные клапаны (в водяных насосах) , зубчатые передачи (в водяных мельницах и часах) — были известны еще во времена Римской империи. [13]
Средневековье
- См. Также: Средневековая технология
Боевая повозка Виджевано
Вращающийся точильный камень — самое раннее его изображение — [14] , который приводится в действие рукояткой рукоятки, показан в рукописи Каролингов Утрехтский Псалтырь ; рисунок пером около 830 года восходит к позднему античному оригиналу. [15] Музыкальный трактат, приписываемый аббату Одо из Клюни (ок.878−942) описывает струнный инструмент, звучащий из смолистого колеса, вращаемого рукояткой; позже устройство появляется в двух иллюминированных рукописях XII века. [14] Есть также две фотографии Фортуны, вращающей колесо судьбы, из этого и следующего столетия. [14]
Использование кривошипных рукояток в трепанационных сверлах было описано в издании 1887 года «Dictionnaire des Antiquités Grecques et Romaines », выпущенном в 1887 году и принадлежащем испанскому хирургу-мусульманину Абу аль-Касим аль-Захрави; однако существование такого устройства не может быть подтверждено исходным освещением, и поэтому его следует не принимать во внимание. [16] Бенедиктинский монах Феофил Пресвитер (ок. 1070–1125) описал кривошипные рукоятки, «используемые для токарной обработки литейных стержней». [17]
Итальянский врач Гвидо да Виджевано (ок. 1280–1349), планируя новый крестовый поход, сделал иллюстрации для гребного катера и боевых экипажей, которые приводились в движение вручную вращающимися составными кривошипами и зубчатыми колесами (в центре рисунка). изображение). [18] Псалтырь Латтрелла , датируемый примерно 1340 годом, описывает точильный камень, который вращался двумя кривошипами, по одному на каждом конце его оси; ручная мельница с редуктором, работающая с одним или двумя кривошипами, появилась позже, в 15 веке; [19]
Средневековые краны иногда приводились в движение кривошипами, хотя чаще — лебедками. [20]
Возрождение
- См. Также: Технология Возрождения
Гребная лодка 15-го века, лопасти которой вращаются одноходовыми коленчатыми валами (Аноним из Гуситских войн)
К началу 15-го века кривошип стал обычным явлением в Европе, его часто видели в работах таких, как немецкий военный инженер Конрад Кезер. [19] Устройства, изображенные в Bellifortis Кизера, включают изогнутые лебедки (вместо колес со спицами) для крепления осадных арбалетов, кривую цепь ведер для подъема воды и кривошипы, прикрепленные к колесу колоколов. [19] Kyeser также оснастил винты Archimedes для подъема воды кривошипной рукояткой — новшество, которое впоследствии заменило древнюю практику работы с трубой с помощью протектора. [21] Самое раннее свидетельство оснащения колодезного подъемника кривошипами найдено на миниатюре ок. 1425 в немецком Hausbuch Фонда Менделя . [22]
Немецкий арбалетчик, взводящий свое оружие с помощью коленчатого реечного механизма (ок.1493)
Первые изображения составного кривошипа в скобе плотника появляются между 1420 и 1430 годами в различных произведениях искусства Северной Европы. [23] Быстрое внедрение составной кривошипа можно проследить в работах неизвестного немецкого инженера Анонима времен гуситских войн о состоянии военной техники своего времени: во-первых, шатун, примененный Что касается кривошипов, то снова появились шатуны, во-вторых, шатуны с двойным составом также стали оснащаться шатунами, и в-третьих, для этих шатунов использовался маховик, чтобы вывести их из «мертвой точки».
На одном из рисунков Анонима гуситских войн изображена лодка с парой гребных колес на каждом конце, вращаемой людьми, работающими с составными кривошипами (см. Выше). Эта концепция была значительно улучшена итальянцем Роберто Вальтурио в 1463 году, который изобрел лодку с пятью наборами, в которой все параллельные кривошипы соединены с одним источником энергии одним шатуном, идея также была подхвачена его соотечественником Франческо ди Джорджио. . [24]
Водоподъемный насос, приводимый в действие кривошипно-шатунным механизмом (Георг Андреас Бёклер, 1661)
В Италии эпохи Возрождения самые ранние свидетельства использования составной кривошипа и шатуна были найдены в альбомах Taccola, но устройство все еще существует. механически неправильно понят. [25] Четкое уловление движения кривошипа демонстрирует немного позднее Пизанелло, который нарисовал поршневой насос с приводом от него. от водяного колеса и приводится в действие двумя простыми кривошипами и двумя шатунами. [25]
В 15 веке также были введены изогнутые реечные устройства, называемые кранами, которые устанавливались на приклад арбалета как средство приложения еще большей силы при захвате ракетного оружия (см. Справа) . [26] В текстильной промышленности были внедрены изогнутые катушки для наматывания мотков пряжи. [19]
Примерно в 1480 году роторный точильный камень раннего средневековья был усовершенствован с помощью педали и кривошипно-шатунного механизма. Шатуны, установленные на тележках, впервые появляются на немецкой гравюре 1589 года. [27]
Начиная с XVI века, свидетельства использования кривошипов и шатунов, интегрированных в конструкцию машин, становятся многочисленными в технологических трактатах того периода: Агостино Рамелли. Разнообразные и искусственные машины Только из 1588 изображает восемнадцать примеров, число, которое поднимается в Theatrum Machinarum Novum Георга Андреаса Бёклера до 45 различных машин, что составляет одну треть от общего числа. [28]
Дальний Восток
Тибетец, управляющий кверном (1938). Перпендикулярная ручка таких вращающихся ручных фрез работает как кривошип. [3] [4]
Самая ранняя настоящая кривошипная ручка в ханьском Китае встречается, как изображают модели глазурованных гробниц эпохи Хань, в сельскохозяйственном веялке [29] , датированной не позднее 200 г. н.э. [30] После этого кривошип использовался в Китае для наматывания шелка и прядения конопли, в водяном просеивателе муки, в металлургических сильфонах с гидравлическим приводом и в лебедке колодца. [31] Однако потенциал кривошипа по преобразованию кругового движения в возвратно-поступательное движение, кажется, никогда не был полностью реализован в Китае, и кривошип, как правило, отсутствовал в таких машинах до начала 20-го века. [32]
Ближний Восток
В то время как американо-американский историк технологий Линн Уайт не смогла найти «убедительных доказательств даже простейшего применения кривошипа до книги аль-Джазари 1206 г. н.э.», [19] 9 век в нескольких гидравлических устройствах, описанных братьями Бану Муса в их книге «Книга изобретательных устройств» . [33] Эти устройства, однако, совершали только частичные вращения и не могли передавать большую мощность, [34] , хотя потребовалась бы лишь небольшая модификация, чтобы преобразовать их в коленчатый вал. [35]
Аль-Джазари (1136–1206) описал кривошипно-шатунную систему вращающейся машины в двух своих водоподъемных машинах. [36] Его двухцилиндровый насос включал коленчатый вал, [37] , но устройство было излишне сложным, что указывало на то, что он все еще не полностью понимал концепцию преобразования энергии. [38] После аль-Джазари чудаки в исламских технологиях не прослеживаются до копии начала 15 века «Механики » древнегреческого инженера Героя Александрийского. [16]
ХХ век
Шатуны раньше использовались на некоторых машинах в начале 20 века; например, почти все фонографы до 1930-х годов приводились в действие заводными двигателями с кривошипами. Автомобильные двигатели внутреннего сгорания обычно запускались кривошипами (известные в Великобритании как стартовые ручки , ) до того, как электрические стартеры вошли в широкое распространение.
В руководстве пользователя Reo 1918 года описывается , как заводить автомобиль вручную:
- Первое: убедитесь, что рычаг переключения передач находится в нейтральном положении.
- Второй: Педаль сцепления не зафиксирована и сцепление включено. Педаль тормоза выдвинута вперед, насколько это возможно, притормаживая заднее колесо.
- Третий: Посмотрите на этот рычаг контроля искры, который представляет собой короткий рычаг, расположенный на верхней части рулевого колеса с правой стороны. находится как можно дальше назад к водителю, а длинный рычаг в верхней части рулевой колонки, управляющий карбюратором, сдвинут вперед примерно на один дюйм от своего запаздывающего положения.
- Четвертый: поверните ключ зажигания в точку, отмеченную «B» или «M».
- Пятое: Установите регулятор карбюратора на рулевой колонке в точку, обозначенную «START». Убедитесь, что в карбюраторе есть бензин. Проверьте это, нажав на маленький штифт, выступающий из передней части бачка, пока карбюратор не затопит. Если заливка не происходит, это означает, что топливо не поступает в карбюратор должным образом, и нельзя ожидать запуска двигателя. См. Инструкции на стр. 56 по заполнению вакуумного бака.
- Шестое: Убедившись, что в карбюратор поступает топливо, возьмитесь за ручку пускового кривошипа, надавите на конец, чтобы защелкнуть храповик со штифтом коленчатого вала, и переверните двигатель, быстро потянув вверх. Никогда не давите вниз, потому что, если по какой-либо причине двигатель откатится, это подвергнет опасности оператора.
Коленчатый вал
Коленчатый вал — коленчатый вал, который также выполняет роль оси. Применяется на паровозах с внутренними цилиндрами.
См. Также
Список литературы
- ↑ 1.0 1.1 Schiöler 2009, стр. 113f.
- ↑ Дата: Франкель 2003, стр. 17–19.
- ↑ 3,0 3,1 Ritti, Grewe & Kessener 2007, стр. 159
- ↑ 4,0 4,1 Лукас 2005, стр. 5, сл. 9
- ↑ Лаур-Беларт 1988, с. 51–52, 56, рис. 42
- ↑ Volpert 1997, стр.195, 199
- ↑ White, Jr. 1962, стр. 105f .; Олесон 1984, стр.230f.
- ↑ 8,0 8,1 8,2 8,3 Ritti, Grewe & Kessener 2007, стр. 161:
Из-за открытий в Эфесе и Герасе изобретение кривошипа и шатуна пришлось перенести с 13-го на 6-й век; теперь рельеф Иераполя переносит его еще на три столетия назад, что подтверждает, что каменные пилорамы с водяной тягой действительно использовались, когда Авзоний писал свою «Мозеллу».
- ↑ Ritti, Grewe & Kessener 2007, стр.139–141
- ↑ Ritti, Grewe & Kessener 2007, стр. 149–153
- ↑ Mangartz 2006, стр. 579f.
- ↑ Wilson 2002, p. 16
- ↑ Ritti, Grewe & Kessener 2007, стр. 156, сл. 74
- ↑ 14,0 14,1 14,2 Уайт, мл. 1962, стр. 110
- ↑ Hägermann & Schneider 1997, стр. 425f.
- ↑ 16,0 16,1 Уайт, мл. 1962 г., стр. 170
- ↑ Нидхэм 1986, стр. 112–113.
- ↑ Холл 1979, стр.80
- ↑ 19,0 19,1 19,2 19,3 19,4 Уайт, мл. 1962, стр. 111
- ↑ Холл 1979, стр. 48
- ↑ Уайт, мл. 1962, стр. 105, 111, 168
- ↑ White, Jr. 1962, стр. 167; Холл 1979, стр. 52
- ↑ White, Jr. 1962, стр. 112
- ↑ White, Jr. 1962, стр. 114
- ↑ 25,0 25,1 Уайт, мл. 1962 г., стр. 113
- ↑ Холл 1979, стр. 74f.
- ↑ Уайт-младший.1962, стр. 167
- ↑ White, Jr. 1962, стр. 172
- ↑
- ↑ White, Jr. 1962, стр. 104
- ↑ Нидхэм 1986, стр. 118–119.
- ↑ White, Jr. 1962, стр. 104:
Тем не менее, изучающий китайскую технологию начала двадцатого века отмечает, что даже поколение назад китайцы «не достигли той стадии, когда непрерывное вращательное движение заменяется возвратно-поступательным движением в технических приспособлениях, таких как дрель, токарный станок, пила. и т. д. Для выполнения этого шага необходимо знакомство с кривошипом.Кривошип в его простой рудиментарной форме мы находим в [современном] китайском лебедке, использование которого, однако, по-видимому, не дало импульса для преобразования возвратно-поступательного движения в круговое движение в других приспособлениях ». В Китае кривошип был известен, но оставался бездействующим в течение по крайней мере девятнадцати веков, его взрывной потенциал для прикладной механики не был признан и не использовался.
- ↑
- ↑ аль-Хассан и Хилл 1992, стр. 45, 61
- ↑
- ↑ Ахмад И Хасан.Система кривошипно-шатун в непрерывно вращающейся машине.
- ↑
- ↑ White, Jr. 1962, стр. 170:
Однако то, что аль-Джазари не совсем понял значение кривошипа для соединения возвратно-поступательного движения с вращательным движением, показано его чрезвычайно сложным насосом, приводимым в действие посредством зубчатого колеса, эксцентрично установленного на его оси.
Библиография
Внешние ссылки
| ||||||||||||||||||||||||||||
Кривошип (механизм) — 3D Анимация
Кривошип представляет собой рычаг, прикрепленный под прямым углом к вращающемуся валу, посредством которого возвратно-поступательное движение передается на вал или принимается от него.Он используется для преобразования кругового движения в возвратно-поступательное или наоборот. Рычаг может быть изогнутой частью вала или отдельным рычагом или прикрепленным к нему диском. К концу кривошипа с помощью стержня прикреплен стержень, обычно называемый шатун (шатун). Конец стержня, прикрепленный к кривошипу, совершает круговое движение, в то время как другой конец обычно вынужден двигаться линейным скользящим движением.
Термин часто относится к кривошипу, приводимому в действие человеком, который используется для ручного поворота оси, как в шатуне велосипеда или в сверле со скобами и сверлами.В этом случае рука или нога человека служит шатуном, прикладывая возвратно-поступательное усилие к кривошипу. Обычно есть штанга, перпендикулярная другому концу руки, часто со свободно вращающейся рукояткой или прикрепленной педалью.
Примеры
Знакомые примеры:
Ручные рукоятки
Двигатели
Почти во всех поршневых двигателях используются кривошипы (с шатунами) для преобразования возвратно-поступательного движения поршней во вращательное движение.Кривошипы встроены в коленчатый вал.
Механика
Смещение конца шатуна приблизительно пропорционально косинусу угла поворота кривошипа, когда он измеряется от верхней мертвой точки (ВМТ). Таким образом, возвратно-поступательное движение, создаваемое стабильно вращающимся кривошипом и шатуном, приблизительно представляет собой простое гармоническое движение:
- x = rcosα + l {\ displaystyle x = r \ cos \ alpha + l}
, где x — расстояние конца шатуна от оси кривошипа, l — длина шатуна, r — длина кривошипа, а α — угол кривошипа, измеренный от верхней мертвой точки (ВМТ).{2} \ alpha}}}
Это различие становится значительным в высокоскоростных двигателях, которым могут потребоваться балансирные валы для уменьшения вибрации из-за этого «вторичного дисбаланса».
Механическое преимущество кривошипа, соотношение между силой на шатуне и крутящим моментом на валу, изменяется на протяжении цикла кривошипа. Отношения между ними примерно:
- τ = Frsin (α + β) {\ displaystyle \ tau = Fr \ sin (\ alpha + \ beta) \,}
, где τ {\ displaystyle \ tau \,} — крутящий момент, а F сила на шатуне.{2} \ alpha}}}}
Например, для длины штока 6 дюймов и радиуса кривошипа 2 дюйма численное решение приведенного выше уравнения определяет, что минимумы скорости (максимальная скорость движения вниз) находятся при угле поворота кривошипа 73,17615 ° после ВМТ. . Затем, используя закон треугольного синуса, можно определить, что угол между кривошипом и шатуном составляет 88,21738 °, а угол шатуна составляет 18,60647 ° от вертикали (см. Уравнение движения поршня # Пример).
Когда кривошип приводится в движение шатуном, проблема возникает, когда кривошип находится в верхней мертвой точке (0 °) или нижней мертвой точке (180 °).В этих точках цикла кривошипа сила на шатуне не вызывает крутящего момента на кривошипе. Следовательно, если кривошип неподвижен и оказывается в одной из этих двух точек, он не может начать движение с помощью шатуна. По этой причине в паровозах, колеса которых приводятся в движение кривошипами, шатуны прикреплены к колесам в точках, разделенных некоторым углом, так что независимо от положения колес при запуске двигателя по крайней мере один шатун будет иметь возможность приложить крутящий момент для запуска поезда.
История
Эксцентрично установленная ручка вращающейся ручной мельницы, которая появилась в кельтиберийской Испании V века до нашей эры и в конечном итоге распространилась по всей Римской империи, представляет собой кривошип. [3] [1] [2]
Хань Китай
Первые рукоятки с ручным приводом появились в Китае во времена династии Хань (202 г. до н. веялки, в водяном просеивателе муки, для металлургических сильфонов с гидравлическим приводом и в лебедке колодца. [4] Однако потенциал кривошипа по преобразованию кругового движения в возвратно-поступательное движение, кажется, никогда не был полностью реализован в Китае, и кривошип, как правило, отсутствовал в таких машинах до начала 20-го века. [5]
Римская империя
Римская железная рукоятка неизвестного назначения, датируемая II веком нашей эры, была раскопана в Августе Рорика, Швейцария. Кусок длиной 82,5 см на одном конце имеет бронзовую ручку длиной 15 см, другая ручка утрачена. [6] [7]
A ок. В Ашхайме, недалеко от Мюнхена, были раскопаны настоящие железные кривошипы длиной 40 см вместе с парой раздробленных жерновов диаметром 50-65 см и разнообразными железными изделиями. Римская мельница с кривошипным механизмом датируется концом 2 века. [8] Часто цитируемая современная реконструкция насоса с ковшовой цепью, приводимого в движение маховиком с ручным приводом с кораблей Nemi, была отклонена как «археологическая фантастика». [9]
Свидетельства наличия кривошипа в сочетании с шатуном появляются на лесопилке Хиераполиса в Малой Азии с 3-го века и на двух каменных лесопилках в Герасе, Римская Сирия, и Эфесе, Малая Азия (оба 6-го века). [10] На фронтоне мельницы Hierapolis показано водяное колесо, питаемое дорожкой мельницы, приводящее в действие через зубчатую передачу две рамные пилы, которые режут прямоугольные блоки с помощью каких-то шатунов и, в случае необходимости, кривошипов. . Сопроводительная надпись на греческом языке. [11]
Кривошипно-шатунные механизмы двух других лесопилок, подтвержденных археологическими исследованиями, работали без зубчатой передачи. [12] [13] В древней литературе есть упоминание о работе водных пил по мрамору недалеко от Трира, ныне Германия, автором поэта Авзония конца 4-го века; [10] Примерно в то же время эти типы мельниц, по-видимому, также указаны христианским святым Григорием Нисским из Анатолии, демонстрирующим разнообразное использование гидроэнергии во многих частях Римской империи. [14] Три находит дату изобретения кривошипно-шатунного механизма на целое тысячелетие. [10] По словам Туллии Ритти, Клауса Греве и Пола Кессенера:
С кривошипно-шатунной системой, все элементы для создания парового двигателя (изобретен в 1712 году) — эолипил Героя (генерирующий паровую энергию), цилиндр и поршень (в металлических силовых насосах), обратные клапаны (в водяных насосах) , зубчатые передачи (в водяных мельницах и часах) — были известны еще во времена Римской империи. [15]
Средневековый Ближний Восток
Кривошип появляется в середине 9 века в нескольких гидравлических устройствах, описанных братьями Бану Муса в их книге «Книга изобретательных устройств ». [16] Эти устройства, однако, совершали только частичные вращения и не могли передавать большую мощность, [17] , хотя потребовалась бы лишь небольшая модификация, чтобы преобразовать их в коленчатый вал. [18]
Аль-Джазари (1136–1206) описал кривошипно-шатунную систему вращающейся машины в двух своих водоподъемных машинах. [19] Его двухцилиндровый насос включал коленчатый вал, [20] включая коленчатый и валовой механизмы. [21]
Средневековая Европа
Кривошип стал обычным явлением в Европе к началу 15 века, что можно было увидеть в работах таких людей, как военный инженер Конрад Кизер (1366 — после 1405). [22] Вращающийся точильный камень — самое раннее его изображение — [23] , который приводится в действие кривошипной рукояткой, показан в рукописи Каролингов Утрехтская Псалтырь ; рисунок пером около 830 года восходит к позднему античному оригиналу. [24] Музыкальный трактат, приписываемый аббату Одо из Клюни (ок.878−942) описывает струнный инструмент, звучащий из смолистого колеса, вращаемого рукояткой; позже устройство появляется в двух иллюминированных рукописях XII века. [23] Есть также две фотографии Фортуны, вращающей колесо судьбы, из этого и следующего столетия. [23]
Использование кривошипных рукояток в трепанационных сверлах было описано в издании 1887 года «Dictionnaire des Antiquités Grecques et Romaines », выпущенном в 1887 году, заслугой испанского хирурга-мусульманина Абу аль-Касима аль-Захрави; однако существование такого устройства не может быть подтверждено исходным освещением, и поэтому его следует не принимать во внимание. [25] Бенедиктинский монах Феофил Пресвитер (ок. 1070–1125) описал кривошипные рукоятки, «используемые при токарной обработке литейных стержней». [26]
Итальянский врач Гвидо да Виджевано (ок. 1280–1349), планируя новый крестовый поход, сделал иллюстрации для гребного катера и боевых экипажей, которые приводились в движение с помощью вручную вращаемых составных кривошипов и зубчатых колес (в центре рисунка). изображение). [27] Псалтырь Латтрелла , датируемый примерно 1340 годом, описывает точильный камень, который вращался двумя кривошипами, по одному на каждом конце его оси; ручная мельница с редуктором, работающая с одним или двумя кривошипами, появилась позже, в 15 веке; [28]
Средневековые краны иногда приводились в движение кривошипами, хотя чаще — лебедками. [29]
Европа эпохи Возрождения
Гребная лодка 15 века, лопасти которой вращаются одноходовыми коленчатыми валами (Аноним Гуситских войн)К началу 15 века кривошип стал обычным явлением в Европе, и его часто можно было увидеть в работах таких авторов, как немецкий военный инженер Конрад Кезер. [28] Устройства, изображенные в Bellifortis Кизера, включают изогнутые лебедки (вместо колес со спицами) для крепления осадных арбалетов, кривую цепь ведер для подъема воды и кривошипы, прикрепленные к колесу колоколов. [28] Kyeser также оснастил винты Archimedes для подъема воды кривошипной рукояткой, нововведением, которое впоследствии заменило древнюю практику работы с трубой с помощью протектора. [30] Самое раннее свидетельство оснащения колодезного подъемника кривошипами найдено на миниатюре ок. 1425 в немецком Hausbuch Фонда Менделя . [31]
Первые изображения составного кривошипа в скобе плотника появляются между 1420 и 1430 годами в различных произведениях искусства Северной Европы. [32] Быстрое внедрение составной кривошипа можно проследить в работах неизвестного немецкого инженера Анонима времен гуситских войн о состоянии военной техники своего времени: во-первых, шатун, примененный Что касается кривошипов, то снова появились шатуны, во-вторых, шатуны с двойным соединением также стали оснащаться шатунами, и в-третьих, для этих шатунов использовался маховик, чтобы вывести их из «мертвой точки».
На одном из рисунков Анонима гуситских войн изображена лодка с парой гребных колес на каждом конце, вращаемой людьми, работающими с составными кривошипами (см. Выше).Эта концепция была значительно улучшена итальянцем Роберто Вальтурио в 1463 году, который изобрел лодку с пятью наборами, в которой все параллельные кривошипы соединены с одним источником энергии одним шатуном, идея также была подхвачена его соотечественником Франческо ди Джорджио. . [33]
В Италии эпохи Возрождения самые ранние свидетельства использования составной кривошипа и шатуна можно найти в альбомах для рисования Такколы, но это устройство до сих пор не понимают механически. [34] Тщательное улавливание этого движения кривошипа демонстрирует немного позднее Пизанелло, который нарисовал поршневой насос с приводом от него. от водяного колеса и приводится в действие двумя простыми кривошипами и двумя шатунами. [34]
В 15 веке также были введены изогнутые реечно-шестеренные устройства, называемые кранами, которые устанавливались на приклад арбалета как средство приложения еще большей силы при захвате ракетного оружия (см. Справа) . [35] В текстильной промышленности были внедрены изогнутые катушки для наматывания мотков пряжи. [28]
Примерно в 1480 году роторный точильный камень раннего средневековья был усовершенствован с помощью педали и кривошипно-шатунного механизма. Шатуны, установленные на тележках, впервые появляются на немецкой гравюре 1589 года. [36]
Начиная с XVI века, свидетельства использования кривошипов и шатунов, интегрированных в конструкцию машин, становятся многочисленными в технологических трактатах того периода: только в книге Агостино Рамелли «Разнообразные и искусственные машины 1588 года» представлены восемнадцать примеров. Число, которое увеличивается в Theatrum Machinarum Novum Георга Андреаса Бёклера до 45 различных машин, что составляет одну треть от общего числа. [37]
20 век
Шатуны раньше использовались на некоторых машинах в начале 20 века; например, почти все фонографы до 1930-х годов приводились в действие заводными двигателями с кривошипами.В поршневых двигателях с возвратно-поступательным движением используются кривошипы для преобразования линейного движения поршня во вращательное движение. Двигатели внутреннего сгорания в автомобилях начала 20-го века обычно запускались ручными кривошипами (известные в Великобритании как стартовые ручки ) до того, как электрические стартеры вошли в широкое использование.
В руководстве пользователя Reo 1918 года описывается , как заводить автомобиль вручную:
- Первое: убедитесь, что рычаг переключения передач находится в нейтральном положении.
- Второй: Педаль сцепления не зафиксирована и сцепление включено.Педаль тормоза выдвинута вперед, насколько это возможно, притормаживая заднее колесо.
- Третий: Посмотрите, что рычаг управления искрой, который представляет собой короткий рычаг, расположенный на верхней части рулевого колеса с правой стороны, повернут как можно дальше к водителю, а длинный рычаг находится на верхней части рулевой колонки, управляя карбюратором толкается вперед примерно на один дюйм от своего запаздывающего положения.
- Четвертый: поверните ключ зажигания в точку, отмеченную «B» или «M».
- Пятое: Установите регулятор карбюратора на рулевой колонке в точку, обозначенную «START».«Убедитесь, что в карбюраторе есть бензин. Проверьте это, нажав на маленький штифт, выступающий из передней части бачка, пока карбюратор не затопит. Если он не залит, это означает, что топливо не поступает в карбюратор должным образом. и двигатель не запустится. См. инструкции на стр. 56 по заполнению вакуумного бака.
- Шестое: Убедившись, что в карбюратор есть запас топлива, возьмитесь за ручку пускового кривошипа, нажмите в конце, чтобы защелкнуть храповик со штифтом коленчатого вала, и переверните двигатель, быстро потянув вверх.Никогда не давите вниз, потому что, если по какой-либо причине двигатель откатится, это подвергнет опасности оператора.
Коленчатый вал
Коленчатый вал — коленчатый вал, который также выполняет роль оси. Применяется на паровозах с внутренними цилиндрами.
См. Также
Механизмы: кривошипы с поршнями — BirdBrain Technologies
На этом уроке вы расширите кривошипно-шатунный механизм, чтобы создать кривошипно-поршневой механизм.Посмотрите это видео, чтобы увидеть, как это будет выглядеть.
Этот механизм состоит из четырех частей:
- Кривошип прикреплен к двигателю, который его вращает.
- Шток прикреплен к кривошипу, а поршень прикреплен к шарнирам , которые могут свободно вращаться.
- Направляющая зафиксирована на месте; его цель — заставить поршень двигаться по прямой. Поршень может свободно двигаться вверх и вниз по линии, но не может вращаться.
При вращении кривошипа поршень движется вверх и вниз в линейном возвратно-поступательном движении. Кривошипно-поршневая система преобразует вращательное движение в поступательное. Линейное движение может быть вертикальным или горизонтальным (или в другом направлении), в зависимости от ориентации направляющей.
Необходимые материалы
Бумажный шаблон (см. Материалы для учителей)
При печати шаблона обязательно распечатайте его в реальном размере (без масштабирования) на бумаге размером 8,5 x 11 дюймов.Вы будете использовать шаблон, чтобы вырезать картон, как показано в приведенных ниже инструкциях. Обязательно используйте картон толщиной менее дюйма.
Другие материалы
- кривошипно-шатунный механизм (из урока кривошипа)
- 1 Фрикционный колышек оси Technic
- 1 Балка Technic 13M
- очиститель труб
- линейка или рулетка
- секундомер
Сборка кривошипно-поршневого механизма
- Для этого урока вам понадобится кривошипно-шатунный механизм.Если вы еще не закончили урок по проверке кривошипа, сделайте это в первую очередь.
- Затем используйте это видео, чтобы собрать кривошипно-поршневой механизм.
- Присоедините двигатель к порту двигателя 1 на доске Hummingbird. Напишите простую программу для включения мотора. Наблюдайте за движением механизма.
Построение графика положения поршня
Подумайте о запуске таймера при включении двигателя. По прошествии секунд кривошип вращается, а поршень перемещается вверх и вниз.Мы могли бы построить график со временем по оси абсцисс и положением поршня по оси ординат. Этот график будет выглядеть примерно так, как изображенная ниже кривая.
На рисунке выше показан только один оборот кривошипа. По мере того как кривошип вращается снова и снова, эта кривая будет повторяться. Этот тип периодического движения называется волной.
- Самая высокая точка волны называется пиком , а самая низкая точка называется впадиной . Обозначьте один пик и одну впадину на графике выше.
- Расстояние между пиком и впадиной называется высотой волны . Обозначьте высоту волны на графике выше.
- Как определить высоту волны поршня? Измерьте это значение, а затем сравните свой метод и ответ со своими одноклассниками.
- Волну часто описывают по амплитуде, а не по высоте. Амплитуда составляет половину высоты волны. Найдите амплитуду поршневой волны.
Изменение длины кривошипа
Теперь вы исследуете, как можно изменить волну поршня, изменив длину кривошипа.Вы можете изменить длину рукоятки, используя другие отверстия по ее длине.
- Переместите соединительный штифт на конце кривошипа в соседнее отверстие.
- Измерьте амплитуду поршневой волны.
- Снова измените длину рукоятки. На этот раз поместите соединительный штифт между двумя соединительными штифтами, которые соединяют кривошип с адаптером двигателя.
- Измерьте амплитуду поршневой волны.
- Как амплитуда поршневой волны связана с длиной кривошипа?
- Может ли шток быть короче кривошипа? Почему или почему нет?
Период поршневой волны
Период времени между одним пиком и следующим называется периодом волны.
- Установите 20 оборотов двигателя.
- Воспользуйтесь секундомером, чтобы измерить, сколько времени нужно кривошипу, чтобы повернуться 10 раз.
- Какой период волны?
- Заполните таблицу ниже.
- Как период волны связан со скоростью двигателя? Угадайте период скорости 50 и подтвердите свой ответ.
- Проверьте свой ответ на предыдущий вопрос. Насколько близко было ваше предсказание?
Использование кривошипов и поршней для создания роботов
Кривошипно-поршневые механизмы используются в роботах для линейного движения в определенном направлении.Например, в этом видео показан проект, в котором поршень используется для перемещения персонажа вверх и вниз. Можете ли вы определить детали механизма на видео? Эта роботизированная черепаха также использует кривошип и поршень. Что может быть внутри панциря черепахи?
А теперь попробуйте это на собственном роботе! Как далеко вы хотите переместить поршень? Какой длины должны быть кривошип и шатун, чтобы это произошло? Помните, что поршень не должен двигаться только вертикально или горизонтально. Он может двигаться по прямой в любом направлении!
Получение дополнительной информации
- Кривошипно-ползунковый механизм: на этом веб-сайте показано движение кривошипно-поршневого механизма и описаны его части. Дизельный двигатель
- : В этом видео показано, как дизельный двигатель использует кривошипно-поршневой механизм в автомобиле или грузовике. В этом случае взрыв топлива вызывает поступательное движение поршня, и механизм преобразует это движение для вращения колес транспортного средства.
Глава 5. Планарные рычаги
И Чжанс
Сьюзан Фингер
Стефани Беренс
Содержание
5.1 Введение
5.1.1 Что такое механизмы связи?
Вы когда-нибудь задумывались, какой механизм вызывает появление ветрового стекла? стеклоочиститель на передней вдове автомобиля для качания (рис. 5-1а)? Механизм, показанный на рисунке 5-1b, преобразует вращательное движение двигателя в колебательное движение стеклоочистителя.
Рисунок 5-1 Стеклоочиститель
Сделаем простой механизм с похожим поведением. Возьми немного картона и сделайте четыре полоски, как показано на рисунке 5-2а.
Возьмите 4 штифта и соберите их, как показано на рисунке. 5-2b.
Теперь держите 6 дюймов. полоса, чтобы он не мог двигаться и повернуть 3 дюйма полоска. Вы увидите, что 4in. полоска колеблется.
Рисунок 5-2 Самостоятельный четырехзвенный рычажный механизм
Четырехзвенная связь — это самый простой и часто самый полезный механизм.Как мы упоминали ранее, механизм, состоящий из твердых тел и нижние пары называются связкой (Охота 78). В планарных механизмах есть только два вида нижние пары — революционные пары и призматические пары.
Самая простая связь с замкнутым контуром — это четырехзвенная связь, которая имеет четыре стержня, три подвижных звена, одно фиксированное звено и четыре штифта суставы. Связь, имеющая хотя бы одно фиксированное звено, является механизмом. Следующий пример связи с четырьмя стержнями был создан в SimDesign в simdesign / fourbar.sim
Рисунок 5-3 Четырех стержневой рычажный механизм в SimDesign
Этот механизм имеет три подвижных звена. Две ссылки прикреплены к кадр, который не показан на этом рисунке. В SimDesign ссылки могут быть прибитыми к фону, тем самым превратив их в рамку.
Сколько степеней свободы у этого механизма? Если мы хотим, чтобы у него был только один, мы можем наложить одно ограничение на связь, и он будет иметь определенное движение. Четыре стержня рычага это самый простой и полезный механизм.
Напоминание: механизм состоит из твердых тел и нижних пар. называемые связями (Хант 78). В В планарных механизмах всего два вида нижних пар: поворотные пары и призматические. пары.
5.1.2 Функции рычагов
Функция рычажного механизма состоит в том, чтобы производить вращение, колебание,
или возвратно-поступательное движение от вращения кривошипа или тисков наоборот (Ham и др. 58). Заявленные более конкретно связи могут использоваться для преобразования:
- Непрерывное вращение в непрерывное вращение с постоянной или переменное отношение угловой скорости.
- Непрерывное вращение в колебательное или возвратно-поступательное движение (или обратный), с постоянным или переменным соотношением скоростей.
- Колебание в колебание или возвратно-поступательное движение в возвратно-поступательное движение, с постоянным или переменным соотношением скоростей.
Связи выполняют множество различных функций, которые можно классифицировать.
в соответствии с основной задачей механизма:
- Генерация функции : относительное движение между звеньями подключен к раме,
- Создание пути : путь точки трассировки, или
- Генерация движения : движение соединительного звена.
5.2 Четырехзвенный механизм
Одним из простейших примеров ограниченной связи является четырехзвенный механизм . Разнообразные полезные механизмы могут
быть сформированным из четырехзвенного механизма с помощью небольших изменений, таких как
как изменение характера пар, пропорций ссылок, и т. Д. . Кроме того, многие сложные механизмы связи представляют собой комбинации
двух и более таких механизмов. Большинство четырехзвенных механизмов
попадают в один из следующих двух классов:
- четырехзвенный рычажный механизм и
- кривошипно-шатунный механизм.
5.2.1 Примеры
Механизм параллелограмма
В параллелограммной четырехзвенной навеске ориентация муфты не меняется во время движения. На рисунке изображен загрузчик. Очевидно, что поддержание параллелизма важно в погрузчик. Ковш не должен вращаться при подъеме и опускании. Соответствующий файл SimDesign — simdesign / loader.sim.
Рисунок 5-4 Механизм фронтального погрузчика
Кривошипно-шатунный механизм
Механизм с четырьмя стержнями имеет особые конфигурации, созданные создание одной или нескольких ссылок бесконечной длины.Ползунок-кривошип (или кривошипно-ползунковый механизм), показанный ниже, представляет собой четырехзвенный рычажный механизм с слайдер, заменяющий бесконечно длинную выходную ссылку. Соответствующие Файл SimDesign — simdesign / slider.crank.sim.
Рисунок 5-5 Кривошипно-ползунковый механизм
Эта конфигурация переводит вращательное движение в поступательное. один. Большинство механизмов приводится в движение двигателями, а кривошипные рычаги часто используется для преобразования вращательного движения в линейное движение.
Кривошипно-поршневой
Вы также можете использовать ползунок в качестве входной ссылки, а рукоятку — в качестве выходная ссылка.В этом случае механизм передает трансляционные движение во вращательное движение. Поршни и кривошип во внутреннем двигатель внутреннего сгорания является примером этого типа механизма. В соответствующий файл SimDesign — simdesign / сжигание.sim.
Рисунок 5-6 Кривошип и поршень
Вы можете спросить, почему слева есть еще один слайдер и ссылка. У этого механизма есть две мертвые точки. Слайдер и ссылка слева помогите механизму преодолеть эти мертвые точки.
Устройство подачи блоков
Одно интересное применение ползунка-кривошипа — это устройство подачи блоков.В Файл SimDesign можно найти в simdesign / block-feeder.sim
.Рисунок 5-7 Устройство подачи блоков
5.2.2 Определения
В ряду планарных механизмов простейшая группа нижней пары механизмы представляют собой четырехзвенные связи. A четырехшарнирный рычажный механизм состоит из четырех звеньев в форме стержня и четырех поворотных пар, как показано на рисунке 5-8.
Рисунок 5-8 Четырех стержневой рычажный механизм
Ссылка напротив рамки называется соединительное звено и звенья шарнирно прикреплены к раме называются боковыми ссылками .Ссылка, которую можно свободно перемещать 360 градусов по отношению ко второму звену будет сказано вращать относительно второго звена (не обязательно Рамка). Если возможно, чтобы все четыре бара стали одновременно выровнено, такое состояние называется точкой изменения .
Некоторые важные концепции в механизмах ссылок:
- Кривошип : Боковое звено, которое вращается относительно рамы, является назвал кривошип .
- Коромысло : Любое звено, которое не вращается, называется коромыслом .
- Кривошипно-коромысловой механизм : В четырехзвенном рычаге, если более короткое боковое звено вращается, а другое качается (, т. е. , колеблется), он называется кривошипно-качающимся механизмом .
- Двухкривошипный механизм : В четырехшарнирном рычаге, если оба боковые звенья вращаются, это двухкривошипный механизм .
- Механизм с двойным качающимся рычагом : В четырехзвенном рычаге, если оба Боковые звенья рок-н-ролла называются двухкамерным коромыслом .
5.2.3 Классификация
Перед тем как классифицировать четырехзвенные связи, нам необходимо ввести некоторые основная номенклатура.
В соединении с четырьмя стержнями мы обращаемся к отрезку линии между петли на заданном звене как стержень , где:
- s = длина самого короткого стержня
- l = длина самого длинного стержня
- p, q = длина промежуточного стержня
Теорема Грасгофа утверждает, что четырехзвенный механизм имеет при не менее одно вращающееся звено, если
s + l(5-1)
и все три мобильных ссылки будут качаться, если
s + l> p + q(5-2)
Неравенство 5-1 — это критерий Грасгофа .
Все механизмы с четырьмя стержнями попадают в одну из четырех категорий, перечисленных в Таблица 5-1:
| Чемодан | л + с вер. р + д | Самая короткая полоса | Тип |
|---|---|---|---|
| 1 | Рама | Двухкривошипная | |
| 2 | Сторона | Коромысло | |
| 3 | Муфта | Двойной рокер | |
| 4 | = | Любая | Изменить точку |
| 5 | > | Любая | Двойной рокер |
Из Таблицы 5-1 видно, что для механизма, имеющего кривошип, сумма длины его самого короткого и самого длинного звеньев должна быть меньше, чем или равна сумме длин двух других ссылок.Тем не мение, это условие необходимо, но недостаточно. Механизмы, удовлетворяющие это состояние делится на следующие три категории:
- Когда самая короткая ссылка — боковая, механизм — кривошипно-качающийся. Кратчайший звено — кривошип в механизме.
- Когда самое короткое звено — это кадр механизм, механизм — двухкривошипный.
- Когда самая короткая ссылка — сцепное звено, механизм — двухклавишный.
5.2.4 Угол передачи
На рисунке 5-11, если AB является входным звеном, сила, приложенная к выходному звену, CD , передается через соединительное звено BC . (То есть нажатие на ссылку CD накладывает силу на звено AB , которое передается по ссылке BC .) Для достаточно медленных движений (незначительные силы инерции), сила в соединительном звене чисто растяжение или сжатие (незначительное изгибающее действие) и направлено вдоль г. до н.э. г.Для заданной силы в соединительном звене крутящий момент передаваемый на выходной бар (около точки D ) максимален, когда угол между соединительная штанга BC и выходная штанга CD /2. Следовательно, угол BCD равен называется угол передачи .
(5–3)
Рисунок 5-11 Угол передачи
Когда угол передачи значительно отклоняется от / 2, крутящий момент на выходном стержне уменьшается и может оказаться недостаточным для преодоления трения в система.По этой причине угол отклонения = | / 2- | не должно быть слишком большим. В На практике нет определенного верхнего предела для, поскольку существование силы инерции могут устранить нежелательные силовые отношения который присутствует в статических условиях. Тем не менее следующие критерию можно следовать.5.2.5 Мертвая точка
Когда боковое звено, такое как AB на Рисунке 5-10, выравнивается с соединительным звеном BC , оно может только сжиматься или удлиняется муфтой.В этой конфигурации крутящий момент, приложенный к звено на другой стороне, CD , не может вызвать вращение звена AB . Поэтому считается, что эта ссылка находится в мертвой точке (иногда называется точкой переключения ).
Рисунок 5-10 Мертвая точка
На рисунке 5-11, если AB — кривошип, он может быть выровнен с BC в полное выдвижение по линии AB 1 C 1 или в сгибание с AB 2 в сложенном состоянии B 2 C 2 .Обозначим угол АЦП через и угол DAB на. Мы используем индекс 1 для обозначают расширенное состояние и 2 для обозначения изогнутого состояния ссылок AB и BC . В расширенном состоянии ссылка CD не может вращать по часовой стрелке, не растягивая и не сжимая теоретически жесткая линия AC 1 . Поэтому ссылку CD нельзя перейти в запрещенную зону ниже C 1 D , и должен быть на одном из двух крайние позиции; Другими словами, ссылка CD находится в экстремуме.А Второй экстремум звена CD приходится на = 1 .
Обратите внимание, что крайние положения бокового звена возникают одновременно. с мертвыми точками противоположного звена.
В некоторых случаях мертвая точка может быть полезна для таких задач, как работа. крепление (рисунок 5-11).
Изображение 5-11 Рабочее приспособление
В других случаях мертвая точка должна быть преодолена с помощью момент инерции звеньев или при несимметричном развертывании механизм (рисунок 5-12).
Рисунок 5-12 Преодоление мертвой точки асимметричным развертывание (V-образный двигатель)
5.2.6 Ползунок кривошипно-шатунный механизм
Кривошипно-ползунный механизм, широко известный в двигателей, является частным случаем кривошипно-коромысла механизм. Обратите внимание, что если качелька 3 на рис. 5-13а очень длинный, можно заменить блокировкой, скользящей в изогнутую прорезь или направляющую, как показано. Если длина качельки бесконечна, направляющей и колодки больше нет изогнутый. Скорее, они кажутся прямыми, как показано на рис. 5-13b, а связь принимает форму обычный кривошипно-шатунный механизм .
Рисунок 5-13 Кривошипно-ползунковый механизм
5.2.7 Переворачивание шатунно-ползункового механизма
Инверсия — термин, используемый в кинематике для реверсирования или взаимообмен формы или функции применительно к кинематическим цепям и механизмам. Для Например, взяв другое звено в качестве фиксированного звена, ползунок-кривошип механизм, показанный на рисунке 5-14a, можно перевернуть. в механизмы, показанные на рис. 5-14b, c и d. Разные примеры можно найти в применении этих механизмов.Для Например, механизм насосного устройства на рисунке 5-15 такой же, как на рисунке 5-14b.
Изображение 5-14 Инверсии кривошипно-скользящего механизма
Рисунок 5-15 Насосное устройство
Помните, что переворот механизма не меняет движения его звеньев относительно друг друга, но не изменяет их абсолютные движения.
Содержание
- Полное содержание
- 1 Физические принципы
- 2 Механизмы и простые машины
- 3 Подробнее о машинах и механизмах
- 4 Базовая кинематика жестких тел с ограничениями
- 5 планарных рычагов
- 5.1. Введение
- 5.1.1 Что такое механизмы связи?
- 5.1.2 Функции рычагов
- 5.2 Четыре рычажных механизма
- 5.2.1 Примеры
- 5.2.2 Определения
- 5.2.3 Классификация
- 5.2.4 Угол передачи
- 5.2.5 Мертвая точка
- 5.2.6 Ползунок-кривошипно-шатунный механизм
- 5.2.7 Переворачивание шатунно-ползункового механизма
- 5.2.2 Определения
- 5.1.1 Что такое механизмы связи?
- 6 кулачков
- 7 передач
- 8 Прочие механизмы
- Индекс
- Ссылки
- 1 Физические принципы
sfinger @ ri.cmu.edu
Кривошипно-ползунковый механизм
Кривошипно-ползунковый механизмНАЖМИТЕ ЗДЕСЬ ДЛЯ УКАЗАТЕЛЬНОЙ СТРАНИЦЫ
ШАТУН И СЛАЙДЕР
В. Райан 2002 — 2020
| PDF-ФАЙЛ — НАЖМИТЕ ЗДЕСЬ ДЛЯ ПЕЧАТИ РАБОЧЕГО ЛИСТА | |
Этот механизм состоит из трех важных частей: Кривошип, который является вращающийся диск, ползунок который скользит внутри трубки и шатуна который соединяет части вместе. | |
При движении ползуна вправо шатун толкает колесо по кругу на первые 180 градусов вращения колеса. Когда ползунок начинает двигаться обратно в трубку, шатун тянет колесо вращается, чтобы завершить вращение. | |
| Альтернативная компоновка кривошипа и слайдера | |
Найдите еще два примера кривошипа и ползуна механизмы, нарисуйте схемы и используйте примечания, чтобы объяснить, как они работают. | |
НАЖМИТЕ ЗДЕСЬ, ЧТОБЫ УКАЗАТЬ МЕХАНИЗМЫ СТР. | |
: новое в системе Mathematica 9
X
\! \ (\ * GraphicsBox [{GraphicsGroupBox [GeometricTransformationBox [ {Оттенок [0.05, 0.3, 0.9], EdgeForm [{GrayLevel [0], AbsoluteThickness [ 0.5]}], RectangleBox [{0.7140365793403993, -0.06}, \ {0.9940365793403994, 0,06}], {GrayLevel [0,7], EdgeForm [Нет], RectangleBox [{0.20999999999999996`, -0.11000000000000001`}, \ {1.19, -0.06}], {GrayLevel [0], AbsoluteThickness [0,5], LineBox [{{0.20999999999999996`, -0.06}, {1.19, -0.06}}], {GrayLevel [0,7], EdgeForm [Нет], RectangleBox [{0.20999999999999996`, 0.11000000000000001`}, \ {1.19, 0.06}], {GrayLevel [0], AbsoluteThickness [0.5], LineBox [{{0.20999999999999996`, 0,06}, {1.19, 0,06}}]}}}}}, {{{1, 0}, {0, 1}}, {0., 0.}}]], GraphicsGroupBox [GeometricTransformationBox [ {Оттенок [0,6, 0,2, 0,7], EdgeForm [{GrayLevel [0], AbsoluteThickness [0,5]}], PolygonBox [CompressedData [» 1: eJxTTMoPSmViYGBQAmIQDQPVIuvch2Yt2c / 88lzium / 1 + z1SfHYoiy3ZP29p L0dJZP9 + n6smcqdeL9pvbMJRO / ngtP3abanzvdkX7r / D8t + / 99scOA0Th6mD 6YOZAzMXZg / MXpg70OTt0fTbo5lvj2a / PZr77NHcb4 / mP3s0 / 9sbg8Flexj / et6uN7ybL9vD1CcsKL / 8T / cKzF32ZduYs33mX4G5y75R2ZhjDtNVmLvsfzyW Xy4TctUe7t6zP8vWTLgKc5f9nv02q75vvQpzl / 2hrxox / Yeuwt2FJr8fTf9 + NPP3o9m / H819 + 9Hcvx / Nf / vR / L8fAN4bAVc = «]], {GrayLevel [0], AbsolutePointSize [5], PointBox [{0, 0}], PointBox [{0.3, 0}]}}, {{{ 0,6427876096865393, -0,766044443118978}, {0,766044443118978, 0.6427876096865393}}, {0, 0}}]], GraphicsGroupBox [GeometricTransformationBox [ {GrayLevel [0,85], EdgeForm [{GrayLevel [0], AbsoluteThickness [0,5]}], PolygonBox [CompressedData [» 1: eJxTTMoPSmViYGAQBmIQPWsmCKzcD6F37o9ImOJWHz5v / + SUvK0MlsX2ukxV FxzZ5u6fZNEZqavYYr / 10OfKaWdn7X / PMvFPBGufffqR / zON90 / fz9P8L0Go drJ9CF / s / PLPk / e3PK3IEo6Zbt / 0cXqzr2D // j1H9 ++ 52DDLvu30scjPzq37 S / nmL7G5NMc + bYnwYqFZpftTjl0pvWE7z361wP / InI8Je3bItb4O3DHPPhQi b58Kla + H6LevgOrvgJhvvwtqfhjEfvsmqP0pEPfZ80PdtwXifvvvUPdrQfxn vwLqP6j / 7Vuh / oeGjz0sfABj1Jnp «]], {GrayLevel [0.7], EdgeForm [Нет], RectangleBox [{- 0.1, -0.15000000000000002`}, {0.1, -0.1}], {GrayLevel [0], AbsoluteThickness [0,5], LineBox [{{- 0,1, -0,1}, {0,1, -0,1}}], {GrayLevel [0], AbsolutePointSize [5], PointBox [{0, 0}]}}}}, {{{1, 0}, { 0, 1}}, {0, 0}}]], GraphicsGroupBox [GeometricTransformationBox [ {Оттенок [0,6, 0,2, 0,9], EdgeForm [{GrayLevel [0], AbsoluteThickness [0,5]}], PolygonBox [{{0,192836282