Изучаем систему стабилизации: порог нестабильности — журнал За рулем
При всем разнообразии аббревиатур (ESP, DSC, TCS, ASR) системы активной безопасности имеют общего предка в лице АБС.
1
Появление антиблокировочной системы (AБС) дало возможность оптимизировать торможение, что существенно повысило безопасность автомобиля. Расширение влияния электроники на процессы управления оказалось вопросом времени.
ПЕДАЛЬ В ПОЛ
Первой ступенью эволюции стала противобуксовочная система (ASR, TCS, TRC). Ее задача — контроль тягового усилия на ведущих колесах и поддержание курсовой устойчивости. В различных режимах движения колёса то и дело проскальзывают, то есть возникает расхождение между действительной скоростью и окружной скоростью колес. Особенно сильно это проявляется при ускорении (пробуксовка) и замедлении (блокировка). Величина проскальзывания напрямую влияет на сцепление с покрытием и передачу усилий ускорения, замедления и поворота. В условиях замедления при превышении определенного порога AБС начинает контролировать проскальзывание, а при ускорении на помощь приходит противобуксовочная система (ПБС).
Современные ПБС могут воздействовать на пробуксовку ведущих колес двумя способами: уменьшением крутящего момента двигателя и/или подтормаживанием проскальзывающего колеса. Для «удушения» двигателя есть несколько способов: уменьшение подачи топлива, изменение угла опережения зажигания, прикрытие дроссельной заслонки (при наличии электронного дросселя). ПБС только ставит задачу модулю управления двигателем — воздействие на тормозную систему осуществляется ресурсами AБС.
Конструктивно ПБС не что иное, как модернизированная AБС. Тормозные системы современных автомобилей построены по двухконтурной диагональной схеме. К антиблокировочной системе с восемью клапанами (по два на каждое колесо) добавлены два клапана управления тяговым усилием (по одному в каждом контуре). Скорость колес отслеживается датчиками AБС. При необходимости задействовать тормоза ПБС работает в тех же трех режимах, что и AБС: повышение, удержание и снижение давления. Контуры работают сходным образом.
1 no copyright
Все схемы открываются в полный размер по клику мышки.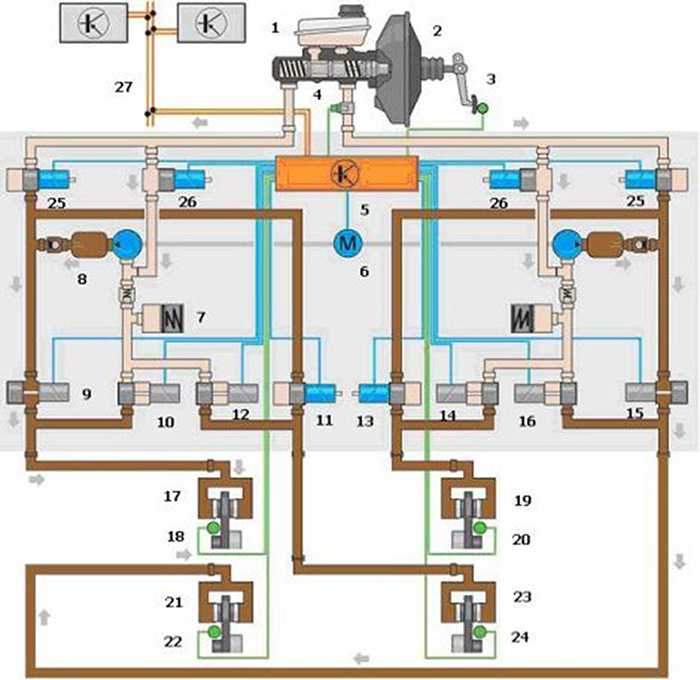
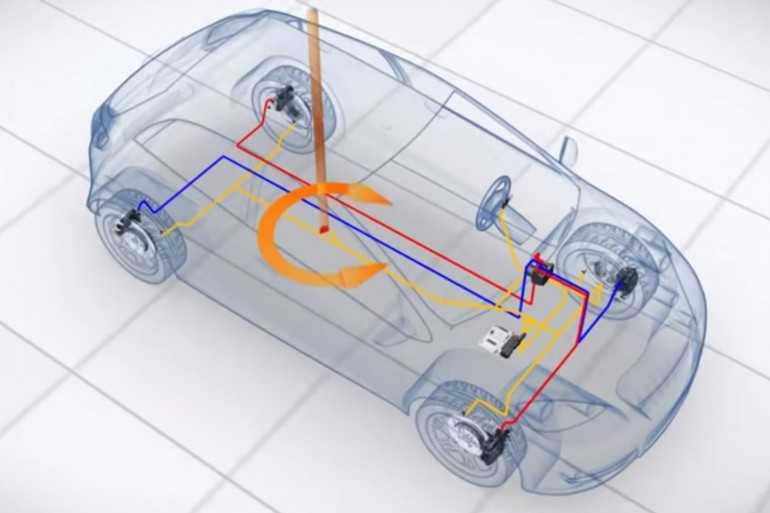
Приведем пример действия системы при пробуксовке переднего правого колеса. С помощью насоса и клапанов давление повышается только в контуре буксующего колеса. Дополнительный клапан ПБС изолирует контур переднего правого и заднего левого колес от главного тормозного цилиндра, иначе рабочаяжидкость уходила бы в цилиндр. Далее клапаны AБС разделяют контуры. При уменьшении пробуксовки изолируется суппорт, а насос отключается. Если проскальзывание продолжает уменьшаться, давление снижается с помощью насоса и клапанов. При необходимости цикл повторяется. У полноприводного автомобиля ПБС работает таким же образом, но дополнительно может отправлять запрос в блок управления полным приводом на перераспределение крутящего момента по осям, чтобы уравнять проскальзывание всех колес.
Пробуксовка ведущих колес опасна во многих ситуациях, особенно зимой. Все видели заднеприводные автомобили, которые поднимаются в горку чуть не боком. А при обычном движении в повороте они могут сорваться в занос. Не лучше обстоят дела и с передним приводом. Для таких машин характерен снос при резком старте или прохождении поворота «на грани». Движение по прямой тоже способно подкинуть сюрприз, если одна сторона машины окажется на льду. Страшно не само попадание на такой участок, а съезд с него: когда проскальзывающее колесо вновь обретет хорошее сцепление, машину может кинуть в сторону. Во всех подобных ситуациях ПБС регулирует проскальзывание ведущих колес.
Не лучше обстоят дела и с передним приводом. Для таких машин характерен снос при резком старте или прохождении поворота «на грани». Движение по прямой тоже способно подкинуть сюрприз, если одна сторона машины окажется на льду. Страшно не само попадание на такой участок, а съезд с него: когда проскальзывающее колесо вновь обретет хорошее сцепление, машину может кинуть в сторону. Во всех подобных ситуациях ПБС регулирует проскальзывание ведущих колес.
ИДЕМ ПОД РУКУ
Следующей ступенью эволюции стала система курсовой устойчивости, или система динамической стабилизации (ESP, DSC, VSC). Этот помощник способен поддерживать заданное водителем направление движения в различных условиях. Там, где пасует ПБС, теми же средствами воздействия справится ESP.
2 no copyright
При сносе или заносе ESP воздействует на тормоза и/или крутящий момент двигателя в зависимости от ситуации. Если автомобиль не вписывается в левый поворот, ESP подтормозит заднее левое колесо, создав дополнительный момент вращения.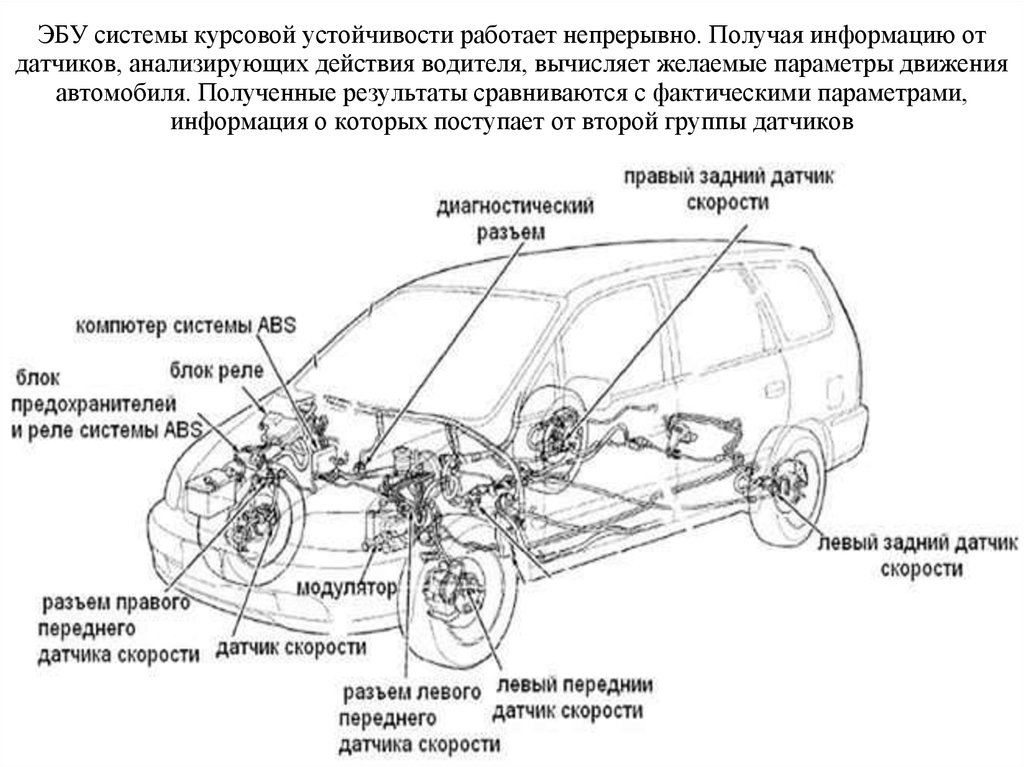 В случае возникновения заноса в этом же повороте электронный помощник исправит ситуацию, придержав переднее правое колесо. Направленный вправо противодействующий момент погасит занос.
В случае возникновения заноса в этом же повороте электронный помощник исправит ситуацию, придержав переднее правое колесо. Направленный вправо противодействующий момент погасит занос.
Система действует на упреждение, пресекая саму возможность неустойчивости. Часто водитель даже не ощущает стороннего вмешательства — лишь индикация системы дает понять, что он где-то ошибся.
3 no copyright
АПГРЕЙД
Как же доработали AБС, чтобы получить описанные возможности? В гидроблок помимо двух клапанов ПБС добавили еще два для работы ESP. А саму машину оборудовали дополнительными датчиками. Гидроблок работает в трех режимах. Два клапана (по одному на каждый контур) стоят между главным тормозным цилиндром и стороной всасывания насоса, чтобы пропустить достаточное количество тормозной жидкости при работе ESP. В остальном система работает подобно противобуксовочной, управляя давлением независимо для каждого колеса. Расходные клапаны, показанные на схеме, служат для снижения гидравлического шума тормозной жидкости в случае больших перепадов давления. Они работают механически и иногда встречаются в базовых блоках AБС.
Они работают механически и иногда встречаются в базовых блоках AБС.
Для определения курса автомобиля ESP использует датчик положения руля. Воздействующие на машину силы отслеживает комбинированный датчик, который оценивает величину поворота вокруг вертикальной оси и поперечные перегрузки. Также ESP определяет скорость — общую и каждого колеса в отдельности — с помощью датчиков AБС. При несоответствии параметров, когда, например, машина не вписывается в вираж (руль повернут, а она движется по прямой), система вмешивается в управление.
Датчик положения руля располагается на колонке в виде отдельного элемента либо его встраивают в комбинированный переключатель света. Существует несколько типов датчиков положения: с элементами Холла, магниторезистивные и фотоэлектрические (самые распространенные). Блок с несколькими фотоэлектрическими датчиками, состоящими из светодиодов и фототранзисторов, считывает диск с прорезями, который вращается вместе с рулем. При вращении диска свет диода воспринимается фототранзистором.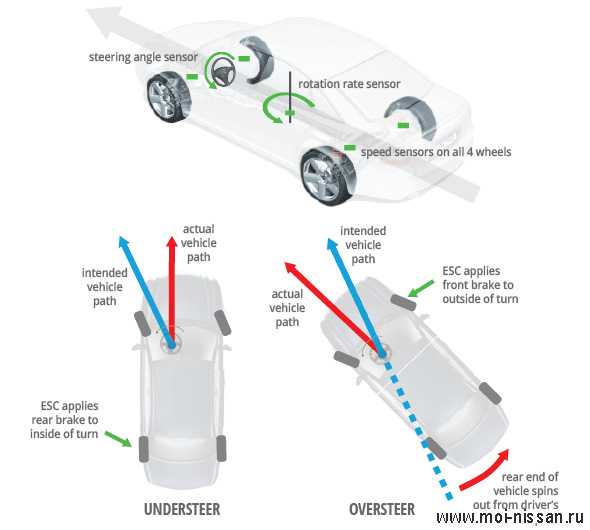 Простейший блок имеет две пары датчиков, сигналы которых сдвинуты друг относительно друга. На основании разницы фаз рассчитываются угол и скорость поворота руля, а также нейтральное положение.
Простейший блок имеет две пары датчиков, сигналы которых сдвинуты друг относительно друга. На основании разницы фаз рассчитываются угол и скорость поворота руля, а также нейтральное положение.
4 no copyright
Комбинированный сенсор определяет воздействующие на машину силы. Он включает в себя минимум два датчика, которые представляют собой разновидность акселерометра и работают как механически, так и электронным способом. Обычно это устройство располагают под передним пассажирским сиденьем или центральной консолью. Оно очень чувствительно к ударам, при установке его следует точно выверять и затягивать с определенным усилием. Небрежность может сказаться на результатах и нарушить работу ESP.
ВЕРТИКАЛЬ ВЛАСТИ
В состав систем стабилизации иногда входит датчик давления тормозной жидкости. Он нужен системе помощи при экстренном торможении, когда водитель от испуга нажимает на педаль быстро, но недостаточно сильно. «Дожиматель» мгновенно создает максимальное давление в приводе. Такие устройства делятся на механические (функция конструктивно включена в вакуумный насос) и электронные (встроены в систему стабилизации).
Такие устройства делятся на механические (функция конструктивно включена в вакуумный насос) и электронные (встроены в систему стабилизации).
В последнее время функции ESP дополняют помощью при спуске с горы или электронной имитацией блокировки дифференциала. Работают они по схожему с описанным выше принципу — оценивая силы, воздействующие на автомобиль, и корректируя тормозами скорость и направление движения.
С момента создания простейшей AБС до появления современных систем стабилизации прошло не так уж много времени, и прогресс в этом направлении продолжается. Но не стоит забывать, что даже самые изощренные электронные помощники не способны отменить законы физики.
ПАЛКИ В КОЛЕСА
У ПБС есть недостатки. В некоторых экстремальных ситуациях, когда спасти положение можно только резким нажатием на газ (например, чтобы вытащить переднеприводный автомобиль из заноса), ПБС не позволит сделать это. Однако отключать систему не стоит — пользы от нее больше, чем вреда.
УЖЕ ПРОХОДИЛИ
Функцию ESP в разных машинах можно отключить полностью либо частично, когда она отодвигает порог срабатывания. Но часто отключение вообще не предусмотрено. Пожалуй, оно оправданно лишь во время гонок, контраварийного обучения и преодоления бездорожья. Во всех остальных случаях ESP окажется полезной даже для опытного водителя.
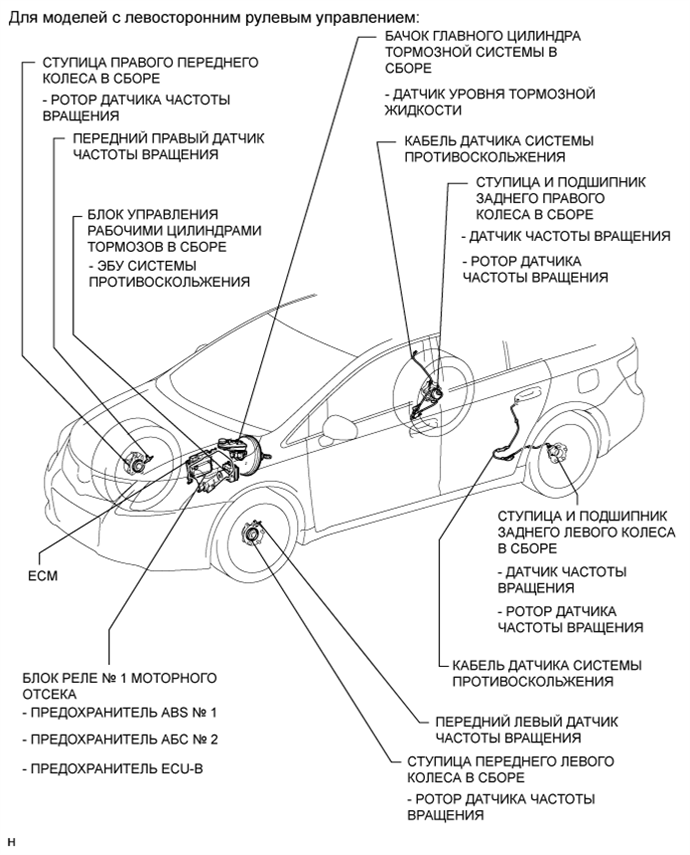
Неисправности ESP — это в большинстве своем неисправности обычной AБС, о которых мы подробно рассказывали в ЗР, 2013, № 7. Конечно, возможны отказы дополнительных элементов, но чаще всего проблемы кроются в датчиках скорости колес.
Изучаем систему стабилизации: порог нестабильности
При всем разнообразии аббревиатур (ESP, DSC, TCS, ASR) системы активной безопасности имеют общего предка в лице АБС.
Изучаем систему стабилизации: порог нестабильности
Как работает система курсовой устойчивости: нужна ли, как отключить
Содержание статьи
- Как еще может называться
- Как выбрать легковой прицеп?
- О чем важно знать
- Как в навигаторе ввести координаты долготы и широты
- Коротко про ESP
- Как отключить
- Тент на Газель с рекламой: как получить бесплатно на свой автомобиль
- Для чего систему отключают
- С каким автомобилем можно использовать прицеп
Здравствуйте, дорогие читатели! Занимаясь изучением вопроса безопасности на машинах, решил с вами обсудить то, как работает система курсовой устойчивости.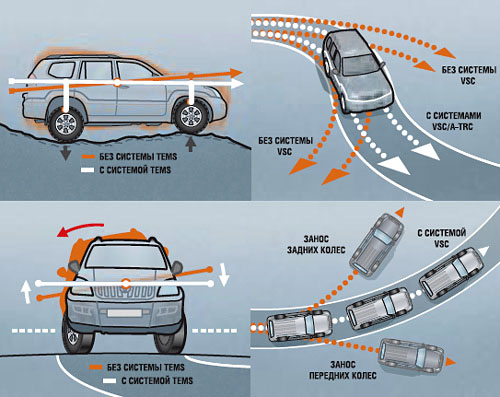
На самом деле частично мы затрагивали вопрос работы ESP, но этот материал отлично дополнит предыдущую статью. Здесь мы отдельно посмотрим на то, нужна ли подобная система, что будет, если она не работает и как отключить по мере необходимости.
ESP, как одно из самых популярных обозначений системы, имеющей много аналогов, применяется повсеместно. Ее можно без проблем встретить на машинах с механикой и с автоматом, на авто на заднем, полном и на переднем приводе. Даже на мотоцикле она предусмотрена часто.
Давайте рассмотрим несколько ключевых вопросов.
Как еще может называться
Скажу сразу, что от названия суть никак не поменяется.
Дело все в том, что автокомпании стремятся зачастую выделиться, подчеркнуть значимость и превосходство именно своей системы. Из-за этого внедряются другие названия. Хотя чаще всего мы видим именно значение ESP.
Полный же список названий может выглядеть так:
- ESP;
- ESC;
- VSC;
- VSA;
- DSC;
- DSTC;
- PMS и пр.
Обычно даже значок приборной панели у всех одинаковый. Это графика скользкой дороги, либо же просто аббревиатура ESP. Лампочка загорается при срабатывании системы.
Если вы знаете еще какие-то аббревиатуры, напишите в комментариях. Нам очень интересно почитать ваши отзывы.
Если не согласны с тем, что все системы курсовой устойчивости фактически идентичные, жду ваших аргументов.
О чем важно знать
Первопроходцем в плане автомобильных систем безопасности считается ABS. С ее помощью достигается максимальная эффективность торможения, не позволяя колесам заблокироваться.
Чуть позже автопроизводители начали внедрять системы, которые автоматически контролируют тягу и обеспечивают стабилизацию транспортного средства. Если говорить про Россию и Таможенный союз, то с января 2016 года на территории стран ТС, включая РФ, не разрешается сертифицировать для продажи транспортные средства, в которых с завода в базовой комплектации не предусмотрено наличие антиблокировочной системы. Той самой ABS. И это абсолютно верное решение.
Той самой ABS. И это абсолютно верное решение.
Что касается противобуксовочной системы, то она носит различные названия, в зависимости от конкретного автомобиля. Чаще всего можно встретить значения ASR и TCS. Но возможны и другие варианты.
Суть у антибукса одна. Она заключается в том, чтобы не позволить машине активно буксовать. Хотя параллельно иногда пробуксовка становится необходимостью.
Допустим, вы попали в глубокий снег или песок. Чтобы выбраться из этой ловушки, требуется активное вращение колес.
Если антипробуксовка будет включена, тогда даже неглубокий снег окажется непреодолимым препятствием для автомобиля. В особенности это касается машин с задним приводом. Пытаясь выехать из ловушки, водитель постоянно видит перед собой мигающую лампу ограничения тяги. Колеса, являющиеся ведущими, вращаются, но делают это короткими рывками, буквально на ¼ оборота каждые полсекунды. Поверьте, подобным образом выбраться из снега или песка не получится.
Чтобы повысить эффективность работы антипробуксовки, на машинах начали внедрять электронную систему стабилизации, то есть ESP.
Эта система имеет более серьезные полномочия и активно вмешивается в процесс движения и управления транспортным средством.
Коротко про ESP
Поведение автомобиля во многом зависит от привода и подвески. Последняя может быть зависимой и независимой, а также полузависимой. Какая из них лучше, мы уже обсуждали.
В составе подвески имеется ряд решений и конструкций, включая поперечный стабилизатор. Но этого недостаточно, чтобы обеспечить безопасную езду.
ESP создана для того, чтобы отслеживать и корректировать поперечную динамику транспорта, оказывать непосредственную помощь водителю. Основной задачей является недопущение срыва авто в заносы и предотвращение боковых скольжений. То есть машина с помощью электроники сохраняет свою курсовую устойчивость, придерживается заданной траектории движения при поворотах и на участках дороги с плохим покрытием. Из-за этого ESP имеет несколько отечественных расшифровок, характеризующих ее работу.
В частности, ее могут называть системой для поддержания курса, либо же противозаносным помощником.
Взаимодействия с другой электроникой, ESP не просто контролирует и меняет крутящий момент на ведущей оси, но и может отдельно затормозить отдельные колеса, чтобы уверенно войти в поворот, к примеру.
Чтобы система могла выполнять такие функции, в ее состав входят специальные датчики. Они следят за поперечным и продольным ускорением, контролируют скорость, с которой вращаются колеса авто относительно вертикальной оси.
Как отключить
Не берусь утверждать, что везде система отключается идентичным образом.
Чаще всего это просто кнопка, на которую нужно нажать. Хотя есть примеры, как тот же Хендай Крета, где при первом нажатии на ESP Off водитель отключает лишь антипробуксовку, а при втором нажатии и удержание выключает ESP полностью.
Есть примеры авто, когда выключается лишь антибукс. У других выполняется частичная деактивация. При высоких скоростях электроника все равно участвует в движении ради вашей безопасности.
На разных авто отключение реализовано своим образом. Загляните лучше в инструкции к своим машинам, таким как:
Загляните лучше в инструкции к своим машинам, таким как:
- Лада Веста;
- Лада Гранта;
- Ниссан Кашкай;
- Тойота Королла;
- Митсубиси Лансер;
- Опель Астра;
- Рено Дастер;
- Мазда 6;
- Ниссан Альмера;
- Ауди А3 и пр.
Вне зависимости от машины, полного отключения навсегда не происходит. Чаще всего автоматическая активация осуществляется в момент запуска зажигания, либо когда автомобиль достигает определенной скорости. На видео можете посмотреть, как на практике работает ESP.
Для чего систему отключают
Особых причин отключать ESP на самом деле нет. Это вариант для тех, кто хочет подрифтить и пустить машину в занос, как учили на курсах экстремального вождения.
Но если вы просто едете по обычной дороге, ESP лучше всегда держать активной. Как и систему помощи старта в гору.
Что действительно бывает полезным, так это выключение противобуксовки. Актуально, если вы попали в снежную или песчаную ловушку, либо пытаетесь выбраться из грязи.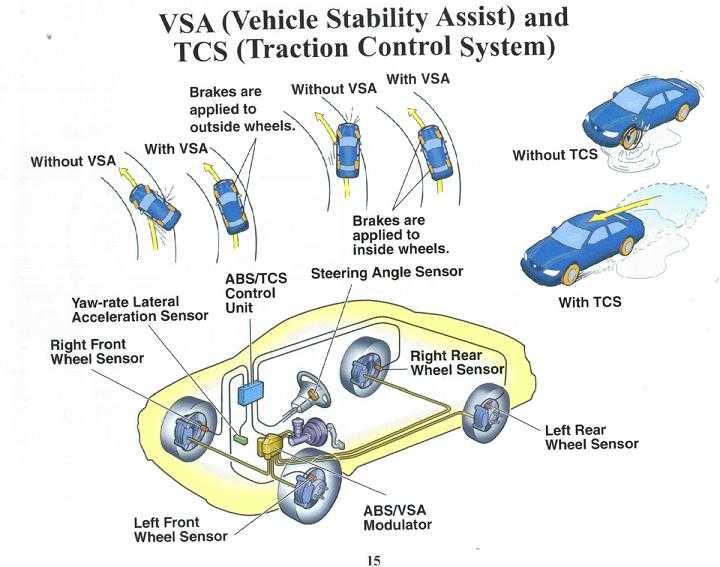
Всем спасибо за ваше внимание! Подписывайтесь, оставляйте комментарии, задавайте вопросы и рассказывайте о нашем проекте своим знакомым!
Watch this video on YouTube
Как работает система курсовой устойчивости ESP?
Современные автомобили включают использование всех технологий, которые позволят предотвратить аварию. Систему курсовой устойчивости esp разрабатывали, исходя из этого принципа.
Ни один из появляющихся сегодня автомобилей не сходит с конвейера без той или иной системы безопасности. Оснащаются ею и более ранние версии машин. Причем многие из современных разработок направлены именно на предотвращение аварии. Именно к таким относится ESP (в расшифровке — Electronic Stability Program).
В переводе на русский язык звучит под названием системы для курсовой устойчивости.
Система курсовой устойчивости ESPТехнология esp нашла не такое сильное распространение (по аналогу, например, а антиблокировочной тормозной системой). Встретить её можно пока только на зарубежных марках машин. Но специалисты с уверенностью прогнозируют её популярность в качестве общепринятого стандарта в течение ближайших пяти лет. Более того, считается, что в ближайшем будущем именно без такой динамической автомобильной стабилизации не будет выпущен ни один автомобиль.
Встретить её можно пока только на зарубежных марках машин. Но специалисты с уверенностью прогнозируют её популярность в качестве общепринятого стандарта в течение ближайших пяти лет. Более того, считается, что в ближайшем будущем именно без такой динамической автомобильной стабилизации не будет выпущен ни один автомобиль.
Содержание
- Предотвращение ДТП при помощи ESP
- Как будет работать система по отношению к динамической безопасности
- Схема функционирования разработки esp
- Преимущества системы
Предотвращение ДТП при помощи ESP
Одним из частых факторов возникновения дорожно-транспортных происшествий является занос. Такое случается при неблагоприятных погодных условиях и от подобного не застрахован ни один водитель. Даже при условии, что он будет полностью соблюдать все правила дорожного движения. Опасно здесь то, что если сам водитель затормозит его развернет, а в случае продолжения движения он может просто вылететь с дороги. Система, предназначенная для курсовой стабилизации машины во время езды, и будет работать с целью оставить авто на траектории движения.
Установленная система и умная технология ESP задумана для того, чтобы избежать подобных заносов, которые могут возникнуть, когда колеса машины начинают ехать по обочине.
Как будет работать система по отношению к динамической безопасности
Работа esp базируется на контроле положения самих ведущих колес. Транспорт соответствует положению руля? Значит, система пока не будет вмешиваться в езду.
В случаях, когда траектория машины не будет соответствовать положению, в которое ставит его рулевое колесо (при заносе или, еще хуже, сносе), то esp начнет вмешиваться — в этом случае шансы спастись от аварии очень большие.
Схема функционирования разработки esp
Работает на стабилизацию такая система по следующему принципу:
- Происходит постоянная обработка поступающих с датчиков сигналов: деталь специального контроллера будет сравнивать как ведет себя автомобиль с тем, что прописано в программе.
- Когда машина ведет себя, отличаясь от расчетных показателей, поступит сигнал об опасности ситуации и контроллер начнет исправлять это.

- С этого момента будет принято решение о выборочном подтормаживании колес (сама технология и определит, какое нужно будет немного приостановить).
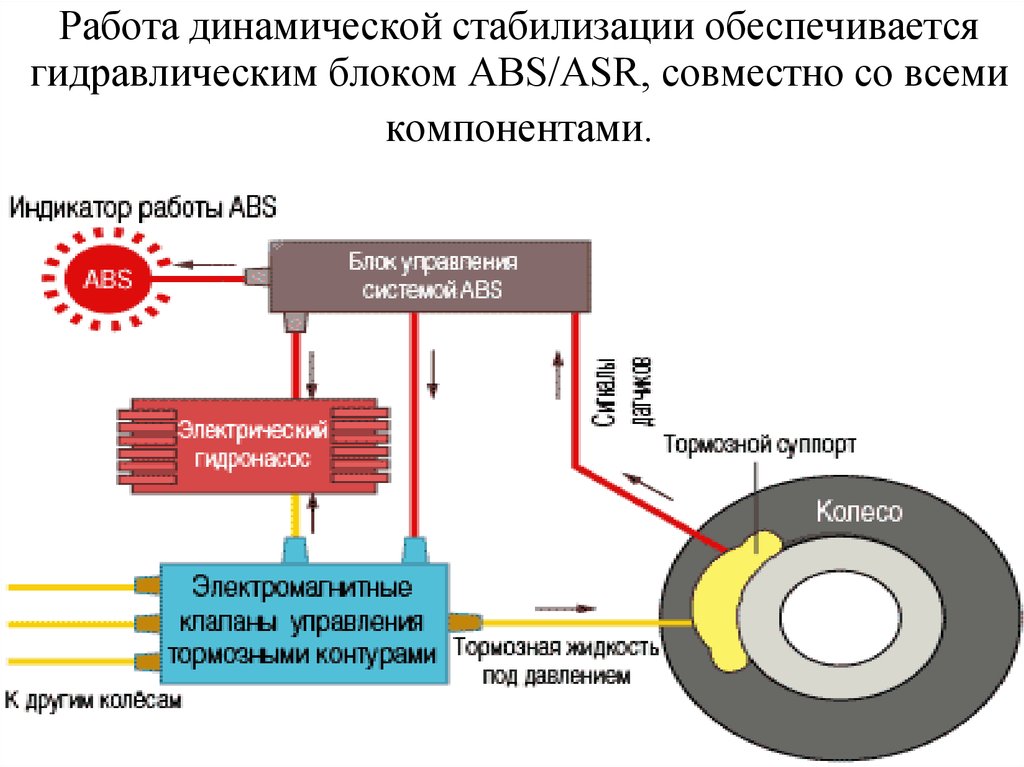
- Гидромудолятор АБС создает необходимые показатели давления уже в самой системе тормозов.
- Вместе с этим непосредственно на блок, отвечающий за двигатель, придет сигнал по топливному сокращению, а для колес уменьшится крутящийся момент.
Таким образом, получается, что призванная курсовой автомобильной устойчивости система будет задействовать многие из механизмов антиблокировочной. Оно понятно: она является её расширением.
Однако это неточная копия: чтобы достичь курсовой устойчивости, необходимы еще и следующие составляющие:
- акселерометр;
- датчики.
Первые будет определять сиюминутное направление траектории машины, а датчики отвечают за положение у рулевого колеса транспорта. Собственно, при расхождении все и включится. Эти устройства зафиксируют даже малейшее боковое скольжение и дадут соответствующие распоряжения для сохранения курсовой автомобильной устойчивости. Получается, что такая система, предназначенная для стабилизации динамической деятельности автомобиля, работает, в любой момент обладая информацией о скорости машины, угле поворота руля, возможностях чрезвычайных ситуаций.
Получается, что такая система, предназначенная для стабилизации динамической деятельности автомобиля, работает, в любой момент обладая информацией о скорости машины, угле поворота руля, возможностях чрезвычайных ситуаций.
Схема блока управления у системы, предназначенной для курсовой автомобильной устойчивости. Итак, система, разработанная для стабилизации, структурно выглядит таким образом:
- электронный блок-контроллер;
- датчик скорости, с которой вращаются колеса;
- датчики, определяющие положение рулевого колеса;
- датчик, измеряющий давление в тормозной системе.
Преимущества системы
Указанная технология устойчивости esp работает с любыми вариантами скорости и движения. Вот только сама схема срабатывания будет зависеть от конкретного момента и того привода, который установлен на используемой машине. Например, если в транспорте стоит автоматическая коробка передач, в таком случае система по отношению к динамической авто стабилизации для курсового выравнивания будет контролировать также работу трансмиссии.
Вот только сама схема срабатывания будет зависеть от конкретного момента и того привода, который установлен на используемой машине. Например, если в транспорте стоит автоматическая коробка передач, в таком случае система по отношению к динамической авто стабилизации для курсового выравнивания будет контролировать также работу трансмиссии.
При случаях, когда самому водителю кажется, что система только будет мешать вождению, можно отключить это принудительно. А во многих марках машин, наоборот, от esp будут допускаться возможности небольших заносов и при скольжении датчики курсовой устойчивости включаться только тогда, когда ситуация будет уже опасной.
Однако при всех своих возможностях, эта технология динамической стабилизации все же не панацея. Она работает только лишь, чтобы снизить вероятность ДТП для возможных опасных моментах, однако её возможности не чудодейственны. Водитель должен отвечать за происходящее на дороге сам.
Устойчивость самолета
- Справочник по авиационным знаниям для пилотов
Соотношение сил, действующих на самолет - Справочник по авиационным знаниям для пилотов
Векторы сил во время установившегося набора высоты - В установившемся полете принципы полета демонстрируют взаимосвязь между силами, действующими на самолет [Рисунок 1]
- Проще говоря: тяга равна сопротивлению, а подъемная сила равна весу, но правильнее будет сказать:
- Сумма всех восходящих составляющих сил (не только подъемной силы) равна сумме всех направленных вниз составляющих сил (не только веса)
- Сумма всех составляющих сил, направленных вперед (не только тяги), равна сумме всех составляющих сил, направленных назад (не только сопротивления)
- Это уточнение касается того, как каждый раз, когда траектория полета самолета не является горизонтальной, векторы подъемной силы, веса, тяги и сопротивления должны разбиваться на две составляющие.

- Векторы силы во время стабилизированного набора высоты показывают, что тяга имеет восходящую составляющую [Рисунок 2]
- При планировании часть вектора веса проходит по прямой траектории полета и поэтому действует как тяга
- Справочник по авиационным знаниям для пилотов
Соотношение сил, действующих на самолет - Справочник по авиационным знаниям для пилотов
Векторы сил во время установившегося набора высоты
- Продольная, поперечная и вертикальная оси
- Продольная ось — это воображаемая линия, идущая от носа к хвосту самолета, движение вокруг этой оси называется «крен», управляемое элеронами
- Продольная устойчивость – это тенденция самолета возвращаться на уравновешенный угол атаки
- Выполняется через рули высоты и рули направления
- Авторы:
- Крылья прямые (негативные)
- Стреловидность крыла (положительная)
- Фюзеляж (негативный)
- Горизонтальный стабилизатор (наибольшая положительная)
- Аэродинамический центр позади центра тяжести (ЦТ) является стабилизирующим моментом
- Аэродинамический центрфорвард C.
 G. является дестабилизирующим моментом
G. является дестабилизирующим моментом - Продольная, поперечная и вертикальная оси Ось
- Боковая ось — это воображаемая линия, идущая от кончика крыла к кончику крыла; движение вокруг этой оси вызывает подъем или опускание носовой части самолета и вызывается перемещением рулей высоты
- Боковая устойчивость – это способность самолета сопротивляться крену
- Двугранный эффект
- Двугранный угол виден, когда самолет кренится, создавая боковое скольжение (при условии отсутствия руля направления)
- Одно из крыльев ниже другого, создавая разницу углов атаки для каждого крыла
- Нижнее крыло имеет увеличенный угол атаки, что заставляет его создавать большую подъемную силу и, следовательно, подниматься, в то время как для более высокого крыла верно обратное [Рисунок 5]
- В результате самолет откатывается от бокового скольжения, сопротивляясь крену и пытаясь вернуть крылья на уровень
- Использование руля сгладит поворот и преодолеет эти и другие силы, такие как неблагоприятное рыскание
- Двугранный эффект
- Эффект стреловидного крыла
- Боковое скольжение создает более прямой относительный ветер по отношению к стреловидному крылу против ветра, что создает крен к уровню крыльев [Рисунок 6]
- Эффект стреловидного крыла
- Эффект руля
- Вертикальная ось — это воображаемая линия, идущая от вершины плоскости к нижней части плоскости.

- Руль направления управляет вращением вокруг этой оси и называется «рыскание» [Рисунок 7]
- Склонность сопротивляться рысканью
- Чем больше площадь поверхности за ЦТ, тем больше курсовая устойчивость
- Соединение поперечной и направляющей осей вызывает голландский крен
- Голландский крен представляет собой комбинированное движение самолета по рысканию и крену, но может быть только помехой, если только ему не разрешено развиваться до больших углов крена
- Сильные качения и рыскания могут стать опасными, если они не будут должным образом демпфированы
- Возмущение бокового скольжения заставит самолет крениться
- Угол крена, в свою очередь, вызывает боковое скольжение в противоположном направлении
- Хотя этот постоянный компромисс между боковым скольжением и углом крена не является нестабильным, он неудобен
- Голландский вал может возбуждаться ветром или чрезмерным регулированием в поперечном направлении
- После индуцирования нормальная устойчивость самолета ослабляет эффект
- Плохие характеристики голландского крена могут сделать самолет восприимчивым к колебаниям, вызванным пилотом (PIO)
- Боковой PIO наиболее распространен, когда пилот пытается выстроиться в посадочной конфигурации
- Эффект руля
- Большинство двигателей авиации общего назначения вращаются по часовой стрелке, как это видит пилот из кабины, глядя через лобовое стекло
- Принципы p-фактора, гироскопической прецессии, крутящего момента и проскальзывания приводят к тенденции левого поворота винта, вращающегося по часовой стрелке.

- В двигателях, настроенных на вращение гребного винта против часовой стрелки, эти принципы становятся тенденцией поворота вправо
- Также называется асимметричной загрузкой
- P-фактор представляет собой сложное взаимодействие между воздушным судном, относительным ветром и относительным вращением ветра
- Нисходящая лопасть имеет более высокий угол атаки и, следовательно, повышенную тягу
- Гироскопическая прецессия – это приложенная сила (которая выводит воздушный винт из плоскости его вращения), ощущаемая под углом 90° от этого места в направлении вращения
- Гироскопическая прецессия более распространена в самолетах с хвостовым колесом на более низких скоростях полета с высокими настройками мощности (взлет).
- На самом деле эта сила считается тенденцией к повороту вправо в трехопорном самолете
- В самолете с хвостовым колесом, на разбеге, когда хвост поднимается, возникает тенденция к левому повороту, так как верхняя часть винта «толкается» вперед, а нижняя «тянется» назад
- При поднятии носа для набора высоты прецессия создаст силу вправо
- При опускании носа для снижения прецессия создаст силу влево
- В вертолетном сообществе гироскопическая прецессия также называется фазовым запаздыванием .

- Крутящий момент — это сила, возникающая, когда вращение лопасти по часовой стрелке заставляет самолет вращаться против часовой стрелки
- Наибольшее значение при низких скоростях полета с высокими настройками мощности и большим углом атаки
- Штопорный ветер ударяет в хвост (руль направления) с левой стороны
- Неблагоприятное рыскание
- Неуравновешенное сопротивление между крыльями, которое вызывает момент рыскания самолета в направлении, противоположном направлению поворота, называется неблагоприятным рысканием [Рисунок 8].
- Каждый раз, когда элероны двигаются, происходит неблагоприятное рыскание
- Когда внешний элерон отклоняется вниз, подъемная сила на внешнем крыле увеличивается, а на внутреннем крыле уменьшается, что приводит к крену самолета
- При повороте вправо: правый элерон вверху, левый внизу
- В повороте налево: левый элерон вверху, правый внизу
- Однако, поскольку элерон, отклоненный вниз, увеличивает подъемную силу аэродинамического профиля, он также увеличивает сопротивление
- Когда внутренний элерон отклоняется вниз, подъемная сила и сопротивление увеличиваются (больше на внешнем крыле)
- Это замедляет внешнее крыло, и руль направления необходимо использовать в направлении поворота, чтобы преодолеть повышенное сопротивление внешнего крыла, чтобы это сопротивление не удерживало крыло назад
- Без руля направления нос будет отклоняться наружу (вне поворота) во время поворота
- Шар-координатор поворота указывает на этот рыскание, перемещаясь внутрь поворота
- Мы называем это квитанцией
- Руль направления компенсирует неравное сопротивление крыльев, возникающее только при отклонении элеронов
- Неуравновешенное сопротивление существует только тогда, когда элероны отклоняются, и самолет находится в процессе качения.

- Это означает, что когда самолет находится в устойчивом крене, элероны нейтральны, поэтому подъемная сила и сопротивление двух крыльев уравновешены
- В этом случае руль вообще не нужен, а фактически в повороте
- Кроме того, поскольку самолет находится в стационарном состоянии (крене), как правило, отклонение элеронов не требуется для поддержания этого состояния
- Чем дальше крылья (элероны), тем больше момент сопротивления
- Неблагоприятное рыскание
- Используя аэродинамические силы тяги, сопротивления, подъемной силы и веса, пилоты могут управлять управляемым и безопасным полетом
- Почему неблагоприятное отклонение от курса имеет значение:
- При повороте скорость сваливания увеличивается
- Если вы испытываете неблагоприятное рыскание, не имея нужного количества руля направления для противодействия, то вы не скоординированы
- Если вы станете медленным, несогласованным с более высокой скоростью сваливания, то вы можете попасть в штопор
- Принимая во внимание только горизонтальный полет, а также нормальный набор высоты и планирование в установившемся режиме, по-прежнему верно, что подъемная сила, обеспечиваемая крылом или винтом, является основной восходящей силой, а вес является основной направленной вниз силой
- Склонность к левостороннему повороту — явление, в первую очередь затрагивающее одномоторные винтовые самолеты.
- Хотя на реактивные самолеты во время полета действуют различные силы, вы можете считать эти силы незначительными
- Самолеты более устойчивы при повороте направо из-за склонности к повороту налево
- Все еще что-то ищете? Продолжить поиск:
- Федеральное авиационное управление — пилот/диспетчер Глоссарий
- Flight Training.aopa.org — Техника, Основной поворот
- Справочник по полетам по приборам (2-11) Координация управления рулем направления и элеронами
- Справочник пилотов по авиационным знаниям
аэродинамика — Почему статическая курсовая устойчивость уменьшается с высотой?
$\begingroup$
При постоянном CAS большая высота означает более низкую плотность воздуха и, следовательно, более высокое TAS: это уменьшает аэродинамическое демпфирование во время вращения.
По этой причине я не могу понять, почему курсовая устойчивость должна уменьшаться с высотой, как указано в этой главе:
Не должен ли восстанавливающий (рыскающий) момент, возникающий в результате бокового скольжения, быть больше, когда аэродинамическое демпфирование менее эффективно ?
РЕДАКТИРОВАТЬ:
Ребята, большое спасибо за ваши ответы. Я должен был предоставить больше информации об этом предмете.
Я студент ATPL, и я столкнулся с этим вопросом во время подготовки к экзамену по принципам полета:
Я должен был предоставить больше информации об этом предмете.
Я студент ATPL, и я столкнулся с этим вопросом во время подготовки к экзамену по принципам полета:
Единственная информация, которую я смог найти в книге, — это глава, которую я разместил выше, и это:
Я не смог найти никаких ссылок на книгу — и на цели обучения EASA для теории ATPL — о Влияние Маха на курсовую устойчивость.
Глава выше, как вы сказали, довольно запутана. График Cn-B показывает, насколько сильна первоначальная склонность носа к отклонению от направления относительного ветра, «закрывая» угол бокового скольжения: чем круче наклон кривой, тем быстрее тенденция A/C к повторному повороту. совпадать с потоком воздуха. Если я правильно понимаю, то график ничего не говорит о динамическом поведении А/С, все о статической (направленной) устойчивости.
Итак, я действительно не могу понять, почему аэродинамическое демпфирование (или какой-либо другой эффект, связанный с увеличением высоты, кроме сжимаемости) должен сглаживать склон, как кажется в книге и в вопросе.
Это очень увлекательная тема, как и все, что связано с принципами полета, поэтому я хотел бы глубже понять ее, и не только потому, что мне нужно сдавать экзамены.
Кстати, если бы у вас была какая-нибудь книга/источник, это было бы замечательно.
- аэродинамика
- устойчивость
- рыскание
$\endgroup$
7
$\begingroup$
Я не думаю, что человек, написавший вопрос в приложении IC-081-050, достаточно хорошо разбирается в теме поперечной устойчивости, чтобы иметь право судить о ней других. Кроме того, текст, который вы цитируете, скачет между статической и динамической стабильностью, не разъясняя каждый раз, что подразумевается под термином «стабильность».
Определения сначала: Статическая устойчивость относится к силам и моментам, которые противодействуют изменению состояния . Динамическая устойчивость относится к силам и моментам, противодействующим движению . В обоих случаях более высокая устойчивость означает более высокие силы и моменты. Разница в их причине.
Динамическая устойчивость относится к силам и моментам, противодействующим движению . В обоих случаях более высокая устойчивость означает более высокие силы и моменты. Разница в их причине.
С этого момента я сосредоточусь только на поперечной устойчивости. Сначала статическая устойчивость: типичным изменением состояния является полет в условиях бокового порыва ветра: внезапно все самолеты летят под измененным углом бокового скольжения. Если мы пренебрежем такими тонкостями, как то, что носовая часть фюзеляжа встречает порыв ветра раньше, чем хвостовая часть, последствия будут следующими:0284
- Дестабилизирующий c$_{n\beta}$ вклад фюзеляжа, который не зависит от числа Маха или угла атаки, поскольку центр давления фюзеляжа значительно опережает центр тяжести.
- Стабилизирующий c$_{n\beta}$ вклад крыла, который пропорционален удлинению, углу стреловидности и двугранному углу и растет пропорционально квадрату коэффициента подъемной силы.

- Сильно стабилизирующий c$_{n\beta}$ вклад вертикального хвостового оперения, который изначально постоянен, но ухудшается с более высоким боковым скольжением, когда хвостовое оперение достигает и превышает свою максимальную боковую силу и сваливается, как крыло. Этот вклад незначительно возрастает с увеличением дозвукового числа Маха, но значительно падает с увеличением динамического давления из-за упругой деформации хвостового оперения и фюзеляжа, к которому оно прикреплено.
Далее, что подразумевается под большей высотой? Ваше первое предложение говорит нам, что это полет с более высоким TAS, но с тем же CAS и, следовательно, с тем же динамическим давлением и коэффициентом подъемной силы, но с более высоким числом Маха. c$_{n\beta}$ должен немного увеличиваться из-за более высокого наклона боковой силы на хвосте, но из-за более высокого TAS любые отклонения от прямой траектории полета должны увеличиваться пропорционально ему. Я предполагаю, что эти очень заметные более высокие отклонения являются причиной того, что автор приложения IC-081-050 думает, что c$_{n\beta}$ сжимается с высотой, но это неверно.
Быстрый полет на той же высоте значительно уменьшит c$_{n\beta}$ из-за упругой деформации, но если CAS остается постоянным, этого эффекта не будет. Возможно также, что автор приложения IC-081-050 путает влияние более высокого динамического давления на c$_{n\beta}$ с более высоким TAS на большей высоте, но это также неверно.
Третья причина неправильного представления о том, что c$_{n\beta}$ изменяется с высотой, заключается в том, что из-за более высокой скорости полета тот же самый порыв ветра вызовет меньшее изменение угла бокового скольжения на большей высоте. Но коэффициент не c$_{n\;gust\:speed}$, а c$_{n\beta}$, поэтому, чтобы отличаться, разное изменение момента рыскания должно быть вызвано тем же изменением угла бокового скольжения. на разных высотах, что неправильно.
Теперь о динамической устойчивости: Типичное движение выражается как скорость рыскания $r$. Динамическая устойчивость рыскания определяется демпфированием рыскания. Как вы правильно сказали, он уменьшается с более высоким TAS, и во многих самолетах это требует использования демпфера рыскания для полетов на большей высоте.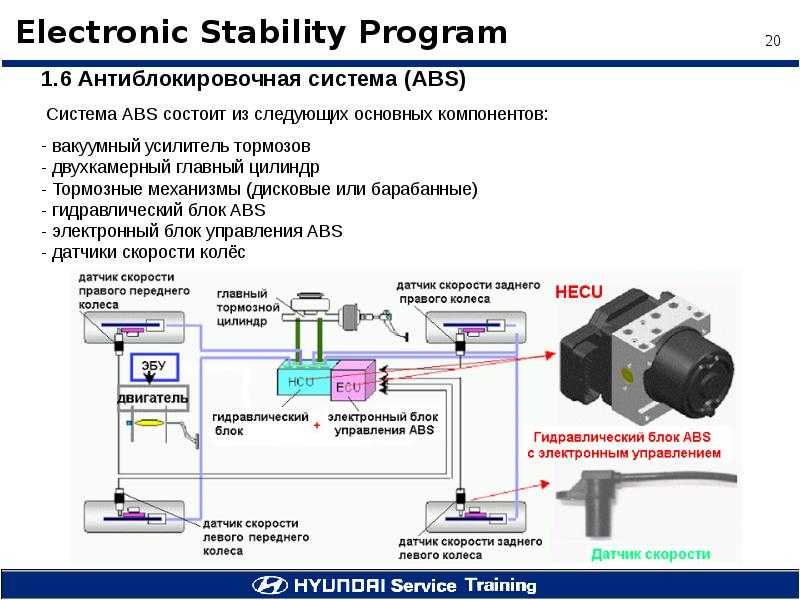 Поскольку у динамической устойчивости есть собственный коэффициент (c$_{nr}$), он не имеет ничего общего с наклоном c$_{n}$ по $\beta$. Для обеспечения динамической устойчивости коэффициент момента рыскания должен быть нанесен на график относительно скорости рыскания, что явно не относится к приложению IC-081-050. Конечно, возможно также, что автор перепутал статическую и динамическую устойчивость и приписал первой высотную зависимость последней. Но это было бы очень большой ошибкой.
Поскольку у динамической устойчивости есть собственный коэффициент (c$_{nr}$), он не имеет ничего общего с наклоном c$_{n}$ по $\beta$. Для обеспечения динамической устойчивости коэффициент момента рыскания должен быть нанесен на график относительно скорости рыскания, что явно не относится к приложению IC-081-050. Конечно, возможно также, что автор перепутал статическую и динамическую устойчивость и приписал первой высотную зависимость последней. Но это было бы очень большой ошибкой.
Кроме того, абзац, выделенный желтым цветом в вашем тексте, хотя и не совсем неверен, но, по крайней мере, вводит в заблуждение. Только если вы интерпретируете наклон, о котором говорит здесь автор, как наклон c$_{n}$ над $r$, я соглашусь со всем, что он или она говорит. Контекст, однако, подразумевает, что он или она имеет в виду наклон c$_{n}$ над $\beta$, что было бы неправильно.
$\endgroup$
7
$\begingroup$
Перед нами довольно сложная «банка червей». Некоторые из цитируемых материалов, кажется, путают причину со следствием или статические эффекты с динамическими эффектами.
Некоторые из цитируемых материалов, кажется, путают причину со следствием или статические эффекты с динамическими эффектами.
Не должен ли восстанавливающий (рыскающий) момент, возникающий в результате бокового скольжения, быть больше, когда аэродинамическое демпфирование менее эффективно?
Похоже, вы воображаете, что с меньшим демпфированием , действующим против вращения по рысканию, восстанавливающий момент от бокового скольжения каким-то образом сможет действовать быстрее или эффективнее, чтобы ввести вращение по рысканью, чтобы прекратить боковое скольжение.
Неверный взгляд на ситуацию.
Чтобы понять почему, вы должны понять, что основная причина аэродинамического демпфирования поворота по рысканию заключается в том, что поворот по рысканью автоматически создает разницу в угле бокового скольжения между носом и хвостом. Весь фюзеляж не может испытывать нулевое боковое скольжение. Если хвост (вертикальный плавник) «флюгер» выравнивается с местным воздушным потоком, нос будет испытывать боковой поток, который создает крутящий момент рыскания, противодействующий вращению рыскания. Точно так же, если руль направления используется для удержания носа на одном уровне с местным воздушным потоком, вертикальный киль будет подвергаться боковому потоку, который создает крутящий момент, противодействующий вращению по рысканью. И обратите внимание, что круче положительный наклон кривой, показанной в учебнике, сильнее этот противодействующий крутящий момент рыскания будет.
Точно так же, если руль направления используется для удержания носа на одном уровне с местным воздушным потоком, вертикальный киль будет подвергаться боковому потоку, который создает крутящий момент, противодействующий вращению по рысканью. И обратите внимание, что круче положительный наклон кривой, показанной в учебнике, сильнее этот противодействующий крутящий момент рыскания будет.
На большой высоте и большом TAS аэродинамическое демпфирование на руле направления менее эффективно, поэтому снижается курсовая устойчивость, что выражается в уменьшении положительного наклона.
Это тоже не совсем правильный взгляд на ситуацию. Снижение курсовой устойчивости («уменьшенный положительный наклон») действительно нельзя объяснить результатом «демпфирования». Снижение курсовой устойчивости («уменьшенный положительный наклон») может быть результатом эффектов, связанных с высоким числом Маха, но не совсем ясно, действительно ли это то, что цитируемый текст пытается описать.
Правда в том, что всякий раз, когда мы говорим о «демпфировании», нам нужно точно указать, что имеется в виду под «демпфированием». Обычно мы говорим о динамическом эффекте — что-то, связанное с частотой чего-то другого. Так же и цитируемый отрывок пытается решить проблему аэродинамического демпфирования 9-го калибра.0376 скорость вращения по рысканию, тангажу или крену? Или он пытается решить проблему демпфирования колебаний , таких как фугоид высоты тона или таких как колебания «голландского крена»? Или мы на самом деле говорим об уменьшении крутящего момента флюгера на градус бокового скольжения (т. е. статической курсовой устойчивости) для данного IAS, что не было бы обычным использованием термина «демпфирование»? Цитируемый отрывок не разъясняет этого.
Это правда, что некоторые тенденции колебаний имеют тенденцию быть наиболее выраженными на большой высоте, для данного CAS или IAS, но цитируемый отрывок не объясняет адекватно, почему это должно быть так.
Ожидается, что повышенная статическая курсовая устойчивость вызовет повышенное демпфирование скорости вращения вокруг вертикальной оси. Сбивает с толку предположение, что увеличение демпфирования скорости вращения вызывает повышенную статическую курсовую устойчивость, а уменьшение демпфирования скорости вращения вызывает снижение статической курсовой устойчивости, как, кажется, и происходит в цитируемом отрывке.
Существует по крайней мере две различные причины, по которым воздушное судно имеет тенденцию быть более склонным к различным динамическим колебаниям на большой высоте (и, следовательно, к высокому TAS) для данной IAS—
Во-первых, сильное демпфирование вращений по рысканию или тангажу имеет тенденцию уменьшать «голландский крен» или «фугоидные» колебания тангажа, соответственно. А для заданных IAS и перегрузок более высокий TAS будет связан с большим радиусом (меньшей скоростью) кривизны траектории полета, поэтому стабилизирующее влияние демпфирования рыскания или тангажа будет играть меньшую роль в динамике самолета. .
.
И, во-вторых, при больших числах Маха наклон кривой статической курсовой устойчивости действительно уменьшается.
$\endgroup$
4
$\begingroup$
После долгих размышлений и благодарности другим ответившим…
почему статическая курсовая устойчивость снижается с высотой?
Не будет, если число Маха останется ниже критического, хотя следует учитывать повышенное стагнационное давление на носовую часть фюзеляжа относительно других поверхностей (даже 300 узлов — это довольно быстро!)
демпфирование на руле менее эффективно, поэтому снижается курсовая устойчивость
Да, но не напрямую. Демпфирование не имеет ничего общего с курсовой устойчивостью. Проще говоря, представьте себе золотой маятник под водой, на уровне моря и на вершине горы Эверест. Вязкое сопротивление ограничивает перерегулирование каждого колебания путем ограничения скорости и, следовательно, углового момента каждого колебания. Все три маятника в конце концов останавливаются.
Вязкое сопротивление ограничивает перерегулирование каждого колебания путем ограничения скорости и, следовательно, углового момента каждого колебания. Все три маятника в конце концов останавливаются.
Корректирующая сила (гравитация) одинакова в каждом случае, если каждый маятник начинается с одного и того же места.
В больших самолетах со стреловидным крылом, таких как авиалайнеры, отсутствие демпфирования проявляется в неустойчивости, потому что при определенной скорости и отклонении перерегулирование становится самоусиливающимся, и цикл рыскания-крена становится все хуже и хуже.
На высоте потребность в подъемной силе одинакова, поэтому дифференциал подъемной силы (стреловидного крыла) для определенной степени рыскания одинаков.
Из-за меньшего демпфирования скорость валка выше. Это сочетается с рысканием, создаваемым дифференциалом сопротивления (крыльев).
Боковое скольжение подливает масла в огонь с каждым циклом рыскания-кувырка.
$\endgroup$
1
$\begingroup$
Не должен ли восстанавливающий (рыскающий) момент, возникающий в результате бокового скольжения, быть больше, когда аэродинамическое демпфирование менее эффективно?
Нет — демпфирование является силой, пропорциональной скорости, в данном случае рысканию скорость $\dot{\beta}$. Восстанавливающий момент является функцией угла рыскания $\beta$, который будет меньше при меньшей плотности воздуха.
Как только самолет начинает реагировать на восстанавливающий момент, возвращаясь в нейтральное положение, демпфирование начинает вращаться, при этом более низкое демпфирование приводит к более быстрому возврату в нейтральное положение и большему количеству перерегулирований.
На большой высоте и большом TAS аэродинамическое демпфирование на руле направления менее эффективно, поэтому снижается курсовая устойчивость, что выражается в уменьшении положительного наклона.
Это может привести к усилению склонности к голландскому крену с увеличением высоты.
Уменьшенное демпфирование:
- не может вызвать уменьшение положительного наклона, так как одно является функцией скорости рыскания, а другое — функцией угла рыскания.
- вызывает повышенную склонность к голландскому крену с увеличением высоты.
Динамическое давление исключается из коэффициента момента $C_{n \beta}$, и аргумент, что уменьшение динамического давления приводит к уменьшению наклона коэффициента, не имеет смысла.
$\endgroup$
3
Зарегистрируйтесь или войдите в систему
Зарегистрируйтесь с помощью Google
Зарегистрироваться через Facebook
Зарегистрируйтесь, используя электронную почту и пароль
Опубликовать как гость
Электронная почта
Обязательно, но не отображается
Опубликовать как гость
Электронная почта
Требуется, но не отображается
Нажимая «Опубликовать свой ответ», вы соглашаетесь с нашими условиями обслуживания, политикой конфиденциальности и политикой использования файлов cookie
.
Устойчивость — AviationChief.Com
Устойчивость и маневренность
Начнем с различия между устойчивостью и маневренностью самолета:
его маневренность (управляемость) обеспечивается за счет движений подвижных частей самолета, позволяющих изменять его высоту, скорость и направление.
его устойчивостью является его свойство сохраняться на своей высоте и сопротивляться смещению (например, от порыва ветра) и в случае возмущения развивать силу, восстанавливающую исходные условия полета. До сих пор мы рассматривали только случай самолета в крейсерском полете с постоянной скоростью и высотой. В этом случае мы видели, что на самолет действуют 4 уравновешенные силы (подъем-вес, тяга-сопротивление), приложенные к его центру тяжести.
Маневренность самолета
Три оси вращения
Помимо смещения в горизонтальном направлении, можно учитывать боковые движения (редкие для самолетов) и вращательные движения вокруг трех осей. Движения (представленные на противоположном рисунке) вокруг трех осей соответственно называются креном, тангажем и рысканьем. Эти движения характеризуются вращениями. В отличие от автомобиля, лодки или поезда, самолеты могут двигаться по трем осям. Это движение происходит вокруг центра тяжести самолета. Центр тяжести самолета — это среднее положение, в котором действует вес самолета. На традиционных самолетах в основе управления полетом лежат три типа устройств: элероны, руль направления и горизонтальные стабилизаторы.
Движения (представленные на противоположном рисунке) вокруг трех осей соответственно называются креном, тангажем и рысканьем. Эти движения характеризуются вращениями. В отличие от автомобиля, лодки или поезда, самолеты могут двигаться по трем осям. Это движение происходит вокруг центра тяжести самолета. Центр тяжести самолета — это среднее положение, в котором действует вес самолета. На традиционных самолетах в основе управления полетом лежат три типа устройств: элероны, руль направления и горизонтальные стабилизаторы.
Тангаж
Тангаж самолета — это движение, при котором самолет разворачивается вокруг своего центра тяжести и когда нос самолета движется в вертикальной плоскости (сверху вниз или вверх). Тангаж управляется благодаря горизонтальным стабилизаторам, также расположенным в хвосте самолета. Эти стабилизаторы имеют шарнирные секции, называемые рулями высоты . Пилот может изменить положение руля высоты, чтобы поднять или опустить нос самолета. Элероны работают встречно: если один поднимается, другой опускается.
Элероны работают встречно: если один поднимается, другой опускается.
Крен
Крен, вторая ось движения, это качение самолета из стороны в сторону, которое заставляет крылья подниматься или опускаться. Это движение по крену производится за счет того, что со стороны опущенного элерона подъемная сила крыла будет увеличиваться, а со стороны поднятого элерона подъемная сила уменьшается. Это создает дисбаланс сил справа и слева от крыла и самолет кренится то в правую, то в левую сторону. Шарнирные секции в задней части каждого крыла, называемые элеронов, помогают контролировать крен.
Рыскание
Третья ось движения, рыскание , – это движение носа самолета из стороны в сторону (или слева направо), и самолет поворачивается вокруг своего центра тяжести по горизонтали самолет. Это движение по рысканию контролируется рулем направления, обычно расположенным в хвостовой части самолета. Это устройство работает по тому же принципу, что и руль лодки.
Это устройство работает по тому же принципу, что и руль лодки.
Устойчивость самолета
- Возможность возврата к исходной траектории полета
- Позволяет воздушному судну поддерживать одинаковые условия полета, восстанавливаться после возмущений и минимизировать нагрузку на пилота
- Самолет спроектирован с положительной динамикой, что подразумевает положительную статическую нагрузку
- Более стабильная при правых поворотах из-за тенденции левого поворота
- Ось самолета – воображаемые линии, проходящие через самолет; считается точками поворота
- Продольная ось: проходит от носа до хвоста через фюзеляж
- Боковая ось: проходит от законцовки крыла до законцовки крыла
- Вертикальная ось: проходит через центр фюзеляжа сверху вниз 9003 7 Самолет считается устойчивым, если нет вращательного движения или тенденции относительно какой-либо из осей самолета
- Статическая устойчивость – это начальная тенденция самолета
- Стабильность может быть описана как положительная, отрицательная или нейтральная
- Нейтральный Статический:
- Тенденция оставаться в новом положении [Рисунок 2]
- Если самолет входит в поворот и пилот отпускает органы управления, а самолет остается в этом повороте, но не выкатывается и не становится более крутым [Рисунок 3]
- Если самолет накренился на большой угол крена, отпускание органов управления приводит к дальнейшему крену самолета
Рисунок 3: Нейтральная статическая стабильность
Рисунок 1. Положительная статическая стабильность
Положительная статическая стабильность
Рис. 2. Отрицательная статическая стабильность
Динамическая устойчивость
- Динамическая устойчивость — это тенденция самолета с течением времени
- Самолет должен иметь положительную статическую устойчивость, чтобы иметь динамическую устойчивость [Рис. 4]
- Положительная динамическая устойчивость
- это тенденция самолета возвращаться в исходное положение после того, как его потревожили
- Положительная динамическая устойчивость
- Нейтральная динамическая устойчивость:
- Нейтральная динамическая устойчивость — это тенденция самолета возвращаться в исходное положение после возмущения в новое положение
- Отрицательная динамическая устойчивость — это тенденция динамической устойчивости к отрицательной отклонение самолета от исходного положения после возмущения
Рисунок 4: Динамическая устойчивость
Продольная устойчивость
- Продольная ось представляет собой воображаемую линию, проходящую от носа к хвосту самолета, движение вокруг этой оси называется креном и управляется элеронами
- Продольная устойчивость представляет собой тенденцию возвращение самолета на уравновешенный угол атаки
- Выполнено через рули высоты и рули направления
- Авторы:
- Прямое крыло (отрицательное)
- Стреловидность крыла (положительное)
- Фюзеляж (отрицательный)
- Горизонтальный стабилизатор (наибольший положительный)
- Аэродинамический центр позади Ц.
 Г. стабилизирующий момент
Г. стабилизирующий момент - Аэродинамический центрфорвард Ц.Г. является дестабилизирующим моментом
Вертикальная устойчивость
| Рисунок 7: Эффект руля направления |
