Классификатор видов транспорта Рекомендация N 19 Европейской экономической комиссии ООН
Нормативные документы
- Правила транспортно-экспедиционной деятельности
- Таможенный кодекс Российской Федерации
- Устав автомобильного транспорта и городского наземного электрического транспорта
- Федеральный закон о транспортно-экспедиционной деятельности
- Европейское соглашение о международной дорожной перевозке опасных грузов
- Европейское соглашение о международных автомагистралях
- Европейское соглашение о работе экипажей транспортных средств, производящих международные автоперевозки
- Инкотермс 2000
- Инкотермс 2010
- Классификатор видов транспорта
- Код фрахтовых расходов — КФР.
 Согласование описания фрахтовых расходов и других сборов
Согласование описания фрахтовых расходов и других сборов - Коды для видов груза, упаковки и материала упаковки
- Конвенция о временном ввозе
- Конвенция о гражданской ответственности за ущерб, причиненный при перевозке транспортом (КГПОГ)
- Конвенция о договоре международной дорожной перевозки грузов (КДПГ)
- Конвенция о дорожном движении
- Конвенция о дорожных знаках и сигналах
- Конвенция о международной гражданской авиации
- Конвенция о международной морской организации
- Конвенция о международных автомобильных перевозках пассажиров и багажа
- Конвенция о международных смешанных перевозках грузов
- Конвенция о таможенном режиме, применяемом к контейнерам
- Конвенция ООН о морской перевозке грузов
- Международная конвенция по безопасным контейнерам
- Таможенная конвенция о международной перевозке грузов с применением книжки МДП
- Типовая форма международной транспортной накладной (CMR).

Справочник логиста
 Согласование описания фрахтовых расходов и других сборов
Согласование описания фрахтовых расходов и других сборов- Главная
- Правовая база
- Нормативные документы
- Классификатор видов транспорта
Женева, март 1981 г.
Рабочая группа по упрощению процедур международной торговли рекомендует применять кодовые обозначения, описанные ниже, в тех случаях, когда имеется необходимость кодированного представления для указания вида транспорта для целей международной торговли.
В работе тринадцатой сессии Рабочей группы приняли участие представители: Австрии, Бельгии, Болгарии, Венгрии, Германской Демократической Республики, Федеративной Республики Германии, Греции, Дании, Италии, Канады, Нидерландов, Норвегии, Польши, Румынии, Соединенного Королевства Великобритании и Северной Ирландии, Соединенных Штатов Америки, Союза Советских Социалистических Республик, Турции, Финляндии, Франции, Чехословакии, Швейцарии и Швеции.
На сессии присутствовали также представители следующих специализированных учреждений и других межправительственных и неправительственных организаций: Межправительственной морской консультативной организации (ИМКО), Генерального соглашения по тарифам и торговле (ГАТТ), Европейского экономического сообщества (ЕЭС), Совета таможенного сотрудничества (СТС), Центрального бюро международных железнодорожных перевозок (ЦБМЖП), Международной торговой палаты (МТП), Международной авиатранспортной ассоциации (ИАТА), Международного союза железных дорог (МСЖД), Международной организации по стандартизации (ИСО), Международной палаты по судоходству (МПС), Международной федерации транспортно — экспедиторских ассоциаций (ФИАТА) и Международного комитета железнодорожного транспорта (МКЖТ).

-
История вопроса
- Во многих внешнеторговых документах требуется информация о видах транспорта, используемых для перевозки товаров. Необходимость в такой информации может быть вызвана причинами договорного характера, например, в договоре купли — продажи может быть оговорен определенный вид транспорта, или причинами оперативного характера, например, для инструкций по перевозке товаров или уведомления грузополучателя о том, каким видом транспорта прибудут его товары, и т.д. Во многих странах информация о виде транспорта требуется также для транспортной и таможенной статистики.
- Транспортные средства, в частности, автотранспортные средства и железнодорожные вагоны часто обозначаются при помощи регистрационного номера. Такие регистрационные номера не содержат каких-либо элементов, указывающих, к какой категории относятся эти транспортные средства (хотя в некоторых случаях формат этого номера может предполагать определенную категорию транспортных средств).

- Необходимость представления этих сведений в кодированном виде была подтверждена рядом правительств и международных органов и организаций, в том числе Статистическим бюро Организации Объединенных Наций, группами экспертов ЕЭК по смешанным перевозкам и по статистике транспорта, Советом таможенного сотрудничества, Международным союзом железных дорог и Статистическим бюро европейских сообществ. Уже существует большое количество систем классификации, различных по своему совершенству и сложности в зависимости от того, где они используются.

- Исходя из результатов исследования таких систем классификации и принимая во внимание точки зрения, высказанные вышеупомянутыми органами и организациями, представляется, что простая структура кодового обозначения, охватывающая основные виды транспорта, была бы достаточной для базового классификатора.
- Однако следовало бы предусмотреть определенную степень гибкости применения, а также возможность подразделения основного кода путем добавления второй цифры. Было высказано предположение, что это потребуется, в частности, для решения проблем, связанных с требованием в некоторых странах указывать перевозки по внутренним водным путям отдельно от других водных перевозок. Представители этих стран предложили выделить для этих целей в пределах кодирования от 0 до 9 две отдельные цифры, т.е. одну цифру — для морского транспорта, а другую — для внутреннего водного транспорта, с тем чтобы использовать их в соответствии с критериями, предписанными национальными или региональными правилами.

- С другой стороны, представители стран, в которых такое различие не проводится, заявили, что они не смогут согласиться на два различных кода для водного транспорта; кроме того, утверждалось, что орган, выдающий документ, в котором должен быть указан вид транспорта, может не знать или быть не в состоянии применить критерии, установленные такими национальными или региональными правилами. Более того, будущее логическое и иерархическое расширение базового классификатора было бы более затруднительным, если бы один из четырех основных видов транспорта (водный, железнодорожный, автомобильный и воздушный) представлялся иным образом по сравнению с другими. Исходя из этой точки зрения, было бы более логичным предусмотреть возможность подразделения на уровне второй цифры, что, вероятно, потребовалось бы сделать также и для других видов транспорта. (Нет никаких указаний на то, что для таких целей потребовалось бы более одной дополнительной цифры).
- Для того, чтобы согласовать эти различные точки зрения в целях выработки общей рекомендации, необходимо было найти компромиссное решение, и по общему суждению, достичь этого можно было бы лучше всего в рамках основной одноразрядной системы классификации, обладающей определенными возможностями для расширения.
 В качестве возможной основы были рассмотрены многие существующие классификаторы с одноразрядным кодовым обозначением, однако не был найден ни один, который получил бы международное одобрение или имел бы преимущества, которые оправдывали бы его признание в качестве стандарта, рекомендованного ЕЭК.
В качестве возможной основы были рассмотрены многие существующие классификаторы с одноразрядным кодовым обозначением, однако не был найден ни один, который получил бы международное одобрение или имел бы преимущества, которые оправдывали бы его признание в качестве стандарта, рекомендованного ЕЭК. - Вследствие этого и сознавая потребность в согласованном в международном масштабе классификаторе для представления видов транспорта, а также категорий транспортных средств в целях сбора, передачи и обработки внешнеторговых данных, Рабочая группа по упрощению процедур международной торговли подготовила настоящую Рекомендацию как часть своей задачи по разработке классификаторов для элементов данных, используемых во внешней торговле. Предпочтение было оказано цифровому классификатору, поскольку использование алфавитных кодов не дает никаких конкретных мнемонических или других преимуществ.
-
Назначение
Эта Рекомендация устанавливает классификатор с одноразрядным цифровым кодовым обозначением для представления видов транспорта и определения категорий транспортных средств, соответствующих тому виду транспорта, для которого они предназначены.
 Эта Рекомендация предусматривает также возможность добавления второго цифрового знака для любой дальнейшей разбивки, введение которой может потребоваться для той или иной страны или для другого конкретного использования.
Эта Рекомендация предусматривает также возможность добавления второго цифрового знака для любой дальнейшей разбивки, введение которой может потребоваться для той или иной страны или для другого конкретного использования. -
Область применения
Эта Рекомендация применяется во всех случаях, когда вид транспорта представляется в кодированном виде в документах, используемых во внешней торговле, и когда основная простая структура кодового обозначения является достаточной. Эти коды могут быть также использованы в качестве отдельной цифры, стоящей перед обозначением транспортных средств, и могут быть подразделены путем добавления второго факультативного цифрового знака.
-
Терминология
Для целей настоящей Рекомендации применяются следующие определения:
- Вид транспорта: метод транспортировки, используемый для перевозки товаров.
- Транспортные средства: конкретное автотранспортное средство, судно или другой механизм, используемые для перевозки товаров или людей.

-
Описание
Классификатор состоит из следующих основных одноразрядных цифровых обозначений:
Код Вид транспорта Пояснения 0 — В принципе этот код не следует применять, поскольку цифра «0» может использоваться для указания отсутствия ввода данных и т.д. В отсутствие этого код может быть использован, когда указание того или иного вида транспорта было бы бесцельным, например, когда это не требуется для статистической отчетности (для образцов,предметов, переданных в дар, личного имущества и т.д.). 1 Морской транспорт Предусмотрена возможность использования кода 8 для отдельной отчетности о внутреннем водном транспорте при условии, что будут даны надлежащие определения и правила применения, в частности, когда транспортировка проходит по морскому и внутреннему водному путям. 
2 Железнодорожный транспорт — 3 Автодорожный транспорт — 4 Воздушный транспорт — 5 Почтовые отправления (Активный вид транспорта неизвестен). Этот код предусмотрен в силу практических причин, несмотря на то, что это неподлинный вид транспорта. Во многих странах стоимость товара, экспортируемого и импортируемого путем почтовых отправлений, является значительной, однако соответствующий экспортер или импортер не может сказать, каким видом транспорта почтовые грузы пересекают национальную границу. 6 Смешанные перевозки (Активный вид транспорта неизвестен). Этот код предусмотрен в силу практических причин, несмотря на то, что вид транспорта не является подлинным. Он может быть использован в тех случаях, когда грузы перевозятся на основе одного договора о перевозке по крайней мере двумя различными видами транспорта, начиная с того места, где товары принимаются экспедитором, и до указанного места назначения.  (Операции по местному вывозу и доставке грузов, осуществляемые в соответствии с условиями договора перевозки каким-либо одним видом транспорта не рассматриваются как смешанная перевозка).
(Операции по местному вывозу и доставке грузов, осуществляемые в соответствии с условиями договора перевозки каким-либо одним видом транспорта не рассматриваются как смешанная перевозка).7 Фиксированные транспортные установки Этот код применяется к установкам для непрерывной транспортировки, таким, как трубопроводы, воздушные канатные дороги и линии электропередач. 8 Внутренний водный транспорт Этот код используется только в тех случаях, когда этот вид водного транспорта учитывается отдельно в рамках одноразрядного кодового обозначения. 9 Вид транспорта неизвестен Этот код может быть использован в том случае, когда вид транспорта неизвестен или когда нет никакой информации о нем ко времени выдачи соответствующего документа. -
Пояснительные примечания
- Критерии применения
До сего времени не удалось рекомендовать международные критерии для некоторых случаев, например, какой код использовать в том случае, когда перевозка водным транспортом осуществляется частично по внутренним водным путям и частично морем, когда автотранспортные средства и железнодорожные вагоны перевозятся на паромах и т.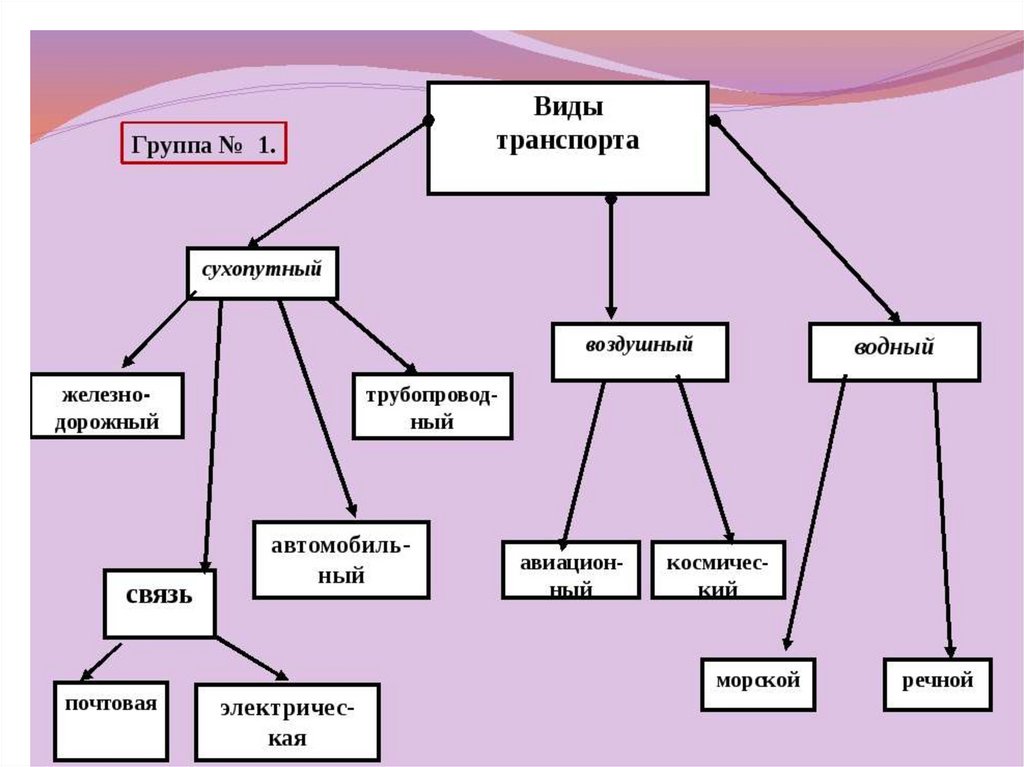 д., хотя в отдельных случаях используется код «активного» транспортного средства, например, когда автомобиль перевозится на поезде, то указывается железнодорожный транспорт. Например, может оказаться, что для статистических целей подходящим является указание активного вида транспорта во время пересечения границы. При отсутствии согласованных международных критериев выпуск соответствующих инструкций и, в случае необходимости, доведения этих инструкций до сведения других заинтересованных органов, с тем чтобы обеспечить сопоставимость статистических данных т.д., падает на национальные или другие соответствующие власти.
д., хотя в отдельных случаях используется код «активного» транспортного средства, например, когда автомобиль перевозится на поезде, то указывается железнодорожный транспорт. Например, может оказаться, что для статистических целей подходящим является указание активного вида транспорта во время пересечения границы. При отсутствии согласованных международных критериев выпуск соответствующих инструкций и, в случае необходимости, доведения этих инструкций до сведения других заинтересованных органов, с тем чтобы обеспечить сопоставимость статистических данных т.д., падает на национальные или другие соответствующие власти. - Гибкость применения
Структура классификатора, предлагаемая в данной Рекомендации, служит для того, чтобы обеспечить максимально возможную гибкость в отношении его применения на национальном уровне, не ставя под угрозу его пригодность для международного использования. Рекомендуемый одноразрядный код может служить, таким образом, основой для международной статистической отчетности и т. д., в то время как второй цифровой знак предназначается для национальных (или региональных) целей.
д., в то время как второй цифровой знак предназначается для национальных (или региональных) целей.
Код 8 зарезервирован для того, чтобы вести учет внутреннего водного транспорта отдельно в рамках одноразрядной структуры кодового обозначения. Если внутренний водный транспорт не существует, или он не учитывается отдельно, или если любые другие конкретные коды не применяются (например, если почтовые отправления или смешанные перевозки не признаются в качестве видов транспорта для статистических целей или если не существует международной железнодорожной связи), тогда нет необходимости в том, чтобы эти коды фигурировали в списке элементов, предназначенных для целей сбора статистических данных. - Использование второго цифрового знака
Допускается, что во многих случаях необходимо будет осуществить дальнейшую разбивку основных кодовых обозначений, и в этих целях, по-видимому, может потребоваться введение второго цифрового знака. Ниже приводятся примеры разбивки:
Имеются примеры разбивки, когда во всех видах транспорта следует указывать, является ли то или иное транспортное средство иностранной или национальной регистрации, перевозятся ли грузы в контейнерах или нет и т.для морского транспорта: морской транспорт
внутренний водный транспорт
каботажное судоходство
сплавдля железнодорожного транспорта: грузовые поезда
пассажирские поездадля автодорожного транспорта: грузы на самоходных автотранспортных средствах
грузы на трейлерахдля почтовых отправлений: пересылка писем
почтовые посылкидля фиксированных установок: нефтепроводы
газопроводы
линии электропередачи
подвесные канатные дороги д. Однако в подобных случаях можно было бы рассмотреть другие решения: в первом случае — путем введения отдельного элемента данных «Национальная принадлежность транспортных средств», а во втором случае — путем указания об использовании контейнеров как одного из видов упаковки.
д. Однако в подобных случаях можно было бы рассмотреть другие решения: в первом случае — путем введения отдельного элемента данных «Национальная принадлежность транспортных средств», а во втором случае — путем указания об использовании контейнеров как одного из видов упаковки. - Использование кодов в целях обозначения категории транспортных средств
Эти коды можно использовать в качестве указателя, стоящего перед конкретным обозначением того или иного транспортного средства, следующим образом:- Код 1 (Морской транспорт): для судов — в качестве отдельной цифры перед названиями судов или кодами (например, 1-AMOUR, 1-ULCZ)
- Код 2 (Железнодорожный транспорт): для железнодорожных вагонов — в качестве отдельной цифры перед номерами железнодорожных вагонов (например, 2-01-85-1370315-9)
- Код 3 (Автодорожный транспорт): для автомобилей — в качестве отдельной цифры перед регистрационными номерами автомобилей (например, 3-СЕ 21201)
- Код 4 (Воздушный транспорт): для самолетов — в качестве отдельной цифры перед номерами авиарейсов (например, 4-SR101)
- Код 6 (Смешанные перевозки): в качестве отдельной цифры перед номерами контейнеров, когда контейнеры указываются в качестве транспортных единиц, аналогичных транспортным средствам (например, 6-EACU1234567)
- Критерии применения
ЕЭК ООН: Классификатор видов транспорта — Классификации АТС
Необходимость информации о видах транспорта, используемых для перевозки товаров, вызвана причинами:
- договорного характера: вид транспорта может быть оговорен в договоре купли — продажи,
- оперативного характера: для инструкций по перевозке товаров или уведомления грузополучателя о том, каким видом транспорта прибудут его товары, на границе,
- во многих странах информация о виде транспорта требуется для транспортной и таможенной
статистики.

Рекомендация 19 ЕЭК ООН 1981г.:
- устанавливает классификатор с одноразрядным цифровым кодами видов транспорта и категорий ТС,
- предусматривает возможность добавления второго цифрового знака для любой дальнейшей разбивки.
Основные цифровые обозначения классификатора (от 0 до 9) представлены в таблице:
Код | Вид транспорта | Пояснения |
0 | — | Код может использоваться для указания отсутствия данных или когда указание вида
транспорта бесцельно. Например, когда это не нужно для статистической отчетности (для образцов, предметов, переданных в дар, личного имущества и т.д.). |
1 | Морской транспорт | Предусмотрена возможность использования кода 8 для отдельной отчетности о внутреннем водном транспорте при условии, что будут даны надлежащие определения и правила применения, в частности, когда транспортировка проходит по морскому и внутреннему водному путям. |
2 | Железнодорожный транспорт | — |
3 | Автодорожный транспорт | — |
4 | Воздушный транспорт | — |
5 | Почтовые отправления | Активный вид транспорта неизвестен. Код предусмотрен в силу практических причин, несмотря на то, что это неподлинный вид транспорта. Во многих странах стоимость экспортируемого и импортируемого путем почтовых отправлений товара значительна, однако соответствующий экспортер или импортер не может сказать, каким видом транспорта почтовые грузы пересекают национальную границу. |
6 | Смешанные перевозки | Активный вид транспорта неизвестен. Код предусмотрен в силу практических причин, несмотря на то, что вид транспорта
не является подлинным. Может быть использован в случаях, когда грузы перевозятся на основе одного договора о перевозке по крайней мере двумя различными видами транспорта, начиная с того места, где товары принимаются экспедитором, и до указанного места назначения. Операции по местному вывозу и доставке грузов, осуществляемые в соответствии с условиями договора перевозки каким-либо одним видом транспорта не рассматриваются как смешанная перевозка. |
7 | Фиксированные транспортные установки | Код применяется к установкам для непрерывной транспортировки: трубопроводы, воздушные
канатные дороги и линии электропередач. |
8 | Внутренний водный транспорт | Код используется только в случаях, когда этот вид водного транспорта учитывается отдельно в рамках одноразрядного кодового обозначения. |
9 | Вид транспорта неизвестен | Код может быть использован в случаях, когда вид транспорта неизвестен и когда нет
никакой информации о нем ко времени выдачи соответствующего документа. |




Классификатор допускает необходимоcть разбивки основных кодов и использование с этой целью второго цифрового знака, что отражено в таблице ниже:
для морского транспорта: | морской транспорт |
для железнодорожного транспорта: | грузовые поезда |
для автодорожного транспорта: | грузы на самоходных автотранспортных средствах |
для почтовых отправлений: | пересылка писем |
для фиксированных установок: | нефтепроводы |
Эти коды можно использовать в качестве указателя перед обозначением ТС:
- Код 1 (Морской транспорт): для судов — отдельная цифра перед названиями судов или кодами: 1-AMOUR, 1-ULCZ,
- Код 2 (Железнодорожный транспорт): для железнодорожных вагонов — отдельная цифра перед номерами железнодорожных вагонов: 2-01-85-1370315-9,
- Код 3 (Автодорожный транспорт): для автомобилей — отдельная цифра перед регистрационными номерами автомобилей: 3-СЕ 21201,
- Код 4 (Воздушный транспорт): для самолетов — отдельная цифра перед номерами авиарейсов: 4-SR101,
- Код 6 (Смешанные перевозки):отдельная цифра перед номерами контейнеров, когда
контейнеры указываются в качестве транспортных единиц, аналогичных транспортным средствам
(например, 6-EACU1234567).

Классификация транспортных режимов — на устройстве и почти в реальном времени
От облака к почти реальному времени На устройстве
В Sentiance мы превращаем движение в информацию, поэтому обнаружение транспортных режимов является одной из наших основных технологий. Мы использовали и были довольны нашим решением на основе глубокого обучения, развернутым в облаке, в течение длительного времени (см. — Классификация крупномасштабных транспортных режимов на основе данных мобильных датчиков). Тем не менее, наконец, технология позволяет нам перейти к более безопасному для конфиденциальности и ресурсоэффективному решению, которое может работать на устройстве.
И Android, и iOS предлагают базовое обнаружение активности на устройстве в режиме реального времени для транспортных режимов (также известное как движение). Однако это не то, что мы на самом деле подразумеваем, говоря «Транспортный классификатор». Вместо того, чтобы всегда переворачивать мгновенные прогнозы, мы стремимся сегментировать поездку на мультимодальные блоки, чтобы понять, когда вы идете, бегаете, ведете машину, едете на велосипеде и т. д.
д.
мы хотим разбить поездку на стабильные виды транспорта (внизу).
Такая классификация видов транспорта более ценна, если мы хотим понять, являетесь ли вы экологичным пассажиром пригородной зоны, пользователем общественного транспорта или несгибаемым водителем. Вдобавок к этому прогнозы почти в реальном времени позволили бы нам проводить гиперперсонализированные кампании и знать, когда нацелить человека?
В этом сообщении блога мы поделимся методологией, которую мы использовали для создания транспортной классификации почти в реальном времени, которая работает на устройстве и обеспечивает стабильную сегментацию транспортных режимов. По сравнению с нашим текущим производственным транспортным классификатором в облаке нам удалось создать комплексное решение, которое соответствует TensorFlow Lite (tflite) , который полностью заменяет сложный блок бизнес-логики нейронной сетью.
Строительные блоки классификатора транспортных режимов
В качестве входных данных мы хотим передать необработанные данные датчиков (акселерометр, данные GPS, функции ГИС и т. д.), а в качестве выходных данных получить текущий вид транспорта. Мы хотим, чтобы вся обработка сигналов, прогнозирование и сегментация выполнялись на устройстве с максимально коротким временем отклика. Наверняка есть какие-то сложности:
д.), а в качестве выходных данных получить текущий вид транспорта. Мы хотим, чтобы вся обработка сигналов, прогнозирование и сегментация выполнялись на устройстве с максимально коротким временем отклика. Наверняка есть какие-то сложности:
- могут быть пробелы в данных датчика, и частота дискретизации может меняться со временем
- каждая мультимодальная поездка имеет различный размер и диапазон огромен (от минут до часов)
- Транспортный классификатор должен игнорировать некоторые события, такие как обработка телефона и бездействие
- решение должно оставаться небольшим и оказывать минимальное влияние на срок службы батареи телефона и ЦП
- мы стремимся к классификации в реальном времени, но в то же время невозможно быть уверенным, когда начнется новый вид транспорта, не дожидаясь хотя бы немного (как вы скоро увидите, что бит будет около 3 минут)
Для решения этих проблем мы будем использовать двухэтапный подход, сочетающий начальную архитектуру с U-net (см. рис. 2 ): позаботьтесь о различных частотах дискретизации и промежутках (перейти к разделу).
рис. 2 ): позаботьтесь о различных частотах дискретизации и промежутках (перейти к разделу).
В следующих разделах мы объясним наш выбор дизайна и обсудим некоторые детали реализации.
Рис. 2. Архитектура транспортного классификатора, сочетающая модели времени начала и времени U-времени.Шаг 1. Приблизительная интерполяция
Для начала мы знаем, что частота дискретизации датчика может меняться, и мы хотим применить некоторую обработку сигнала (по крайней мере, фильтр нижних частот). После некоторых исследований мы наткнулись на изящную идею Б. Льянаса ( Конструктивная приблизительная интерполяция с помощью нейронных сетей, 2006, дои ), которая, по сути, говорит о том, что есть способ сделать приблизительную интерполяцию и сглаживание с использованием различий (и сумм) значений в моменты времени t.
После некоторых исследований мы наткнулись на изящную идею Б. Льянаса ( Конструктивная приблизительная интерполяция с помощью нейронных сетей, 2006, дои ), которая, по сути, говорит о том, что есть способ сделать приблизительную интерполяцию и сглаживание с использованием различий (и сумм) значений в моменты времени t.
Позвольте быть любым разделением интервала . Давайте определим нейронную сеть как:
(1)
. Для проблемы интерполяции эта сеть дает приблизительную интерполяцию, а параметры контролируют гладкость (более низкое значение приведет к более плавной подгонке).
Это можно интерпретировать довольно интуитивно, если подумать о том, что произойдет, если A огромно, и в этом случае оно приближает точку с помощью ступенчатой функции. Мало того, управление значением A позволяет добиться эффекта, аналогичного использованию фильтра нижних частот.
Рисунок 3. Приблизительная интерполяция с использованием ai-net, отображающая влияние параметра гладкости.
В нашем случае данные акселерометра при любой частоте дискретизации будут поступать в модель tflite , где они будут преобразованы в равномерно дискретизированные (до 10 Гц) и слегка сглаженные значения. Получается, что для задачи транспортной классификации наличие более высокой частоты дискретизации, чем 10 Гц, не приводит к выигрышу в точности. Мы эмпирически показали, что он может заменить нормализатор, который обычно состоит из интерполятора, фильтра нижних частот и передискретизатора. Это действительно аккуратное использование простого diff, активация relu и умножение матриц.
Шаг 2. Внедрение
Теперь, когда мы очистили и передискретизировали сигнал акселерометра, мы хотим создать вложение, которое фиксирует важные функции для классификации транспорта и не чувствительно к поворотам телефона.
Для этого мы будем использовать обучающие данные, полученные путем внутренней маркировки тысяч поездок. При реализации инициативы по маркировке мы сосредоточились на двух уровнях детализации, которые мы назвали уровнем датчика и уровнем отключения. Например, на уровне датчиков имеет смысл иметь простои и телефонные обработки, но их следует игнорировать на следующем этапе, когда мы перейдем к окончательной классификации транспортных режимов.
Например, на уровне датчиков имеет смысл иметь простои и телефонные обработки, но их следует игнорировать на следующем этапе, когда мы перейдем к окончательной классификации транспортных режимов.
Для модели на уровне датчика мы передаем 18-секундные окна датчика, передискретизированные до 10 Гц с использованием приблизительной интерполяции. Мы обучили классификатор, основанный на архитектуре InceptionTime ( InceptionTime: Finding AlexNet для классификации временных рядов , 2019, Hassan Ismail Fawaz, Benjamin Lucas, et. al., arxiv), чтобы различать различные транспортные режимы, простои и события обработки телефона.
Архитектура Inception представляет собой разумное усовершенствование стандартной сверточной нейронной сети. В то время как последняя использует фиксированную последовательность обучаемых фильтров предопределенных размеров для извлечения информации в увеличивающемся пространственном или временном масштабе, исходная сеть обладает гибкостью для изучения оптимальной комбинации и последовательности применимых размеров фильтров, тем самым увеличивая репрезентативную мощность сеть.
Сеть по существу состоит из четырех идентичных блоков и одного остаточного пропускного соединения непосредственно со входа. На самом деле, эти блоки называются в литературе «начальными блоками». Потому что в каком-то смысле их можно рассматривать как вложенные сети внутри полной сети.
Рисунок 5. Один начальный блок, используемый в архитектуре InceptionTime (источник: arxiv ). В каждом начальном блоке входные данные отображаются через слой узкого места (ядро размера 1 без смещения) на три отдельных одномерных слоя свертки с размерами по временному измерению 10, 20 и 40 (для захвата разных временных масштабов). Тот же вход передается через максимальный пул на дополнительный сверточный слой, который должен захватывать функции из сигнала с пониженной частотой дискретизации. Выходные данные нормализуются в пакетном режиме и проходят через функцию активации. В конце концов, сумма выходных данных последнего начального блока и остаточного соединения проходит через пул глобальных средних значений, чтобы удалить измерение времени для классификации.![]()
При реализации архитектуры InceptionTime был внесен ряд изменений в исходную архитектуру, представленную в документе:
- Сверточный слой после MaxPool внутри начального блока имеет размер ядра 10 вместо 1 (точность ~3%).
- Все сверточные слои имеют активацию ReLU вместо линейной (с точностью ~ 1%)
- К сверточным слоям, не являющимся узкими местами, применены смещения (с точностью ~2%)
Мы пропускаем окна, которые не имеют энергии, и применяем методы увеличения, чтобы уменьшить чувствительность к вращению и возможному снятию отпечатков пальцев устройства, тем самым предотвращая переоснащение модели шумом конкретного устройства. Для процедуры обучения мы использовали спотовые инстансы MLflow и AWS. На обучение модели на приличном экземпляре графического процессора ушло примерно сутки.
Используя эту архитектуру, мы можем достичь точности ~87% в классификации окон датчиков, тем самым превзойдя наш текущий классификатор транспорта только для датчиков на устройстве, точность которого составляет 84%. На следующем шаге мы отбрасываем окончательные слои модели и используем фиксированные веса, чтобы получить вложение размера 8 для каждого окна.
На следующем шаге мы отбрасываем окончательные слои модели и используем фиксированные веса, чтобы получить вложение размера 8 для каждого окна.
Чтобы использовать возможности больших объемов немаркированных данных и избежать двухэтапной процедуры маркировки, мы в настоящее время изучаем варианты использования неконтролируемых и полуконтролируемых подходов к обучению для обучения модели внедрения.
Шаг 3. Классификатор поездки
Если мы предположим, что мы загружаем всю поездку и стремимся сразу получить сегментацию, мы могли бы использовать двунаправленную LSTM или аналогичную модель, но на самом деле мы хотим добиться классификации почти в реальном времени. Цель состоит в том, чтобы найти золотую середину между точностью и удобством использования, чего мы можем достичь, улучшив время отклика. Проведя несколько экспериментов, мы выяснили, что вводя задержку в 3 минуты, мы жертвуем погрешностью всего 1-2%.
Рисунок 6. Точность по отношению к задержке сигнала указывает на то, что при 180 с мы достигаем убывающей отдачи , Mathias Persev, et. al., arxiv) на встраиваниях, полученных из 31 окна (каждое представляет 18-е) и возвращающих классификации на 21-й позиции (соответствующей 3-минутному отставанию). Есть и другие статьи, использующие U-Net в аналогичной области, например, 9.0008 Распознавание активности человека на основе датчика движения с использованием U-Net (2019, Yong Zhang, et.al., ieee). Основное изменение по сравнению с оригиналом заключается в том, что мы отказались от использования расширений и в итоге использовали только два слоя с активациями elu .
al., arxiv) на встраиваниях, полученных из 31 окна (каждое представляет 18-е) и возвращающих классификации на 21-й позиции (соответствующей 3-минутному отставанию). Есть и другие статьи, использующие U-Net в аналогичной области, например, 9.0008 Распознавание активности человека на основе датчика движения с использованием U-Net (2019, Yong Zhang, et.al., ieee). Основное изменение по сравнению с оригиналом заключается в том, что мы отказались от использования расширений и в итоге использовали только два слоя с активациями elu . Архитектура U-net по своей сути также является сверточной, однако она позволяет сегментировать входные данные, а не просто назначать один класс набору в целом. Это достигается за счет того, что сначала выполняется классификация на уровне пикселей (или в нашем случае на уровне временного окна), которая разбивает входные данные на набор классифицированных блоков. Таким образом, смена класса в соседних блоках означает границу, которая в нашем случае является сменой вида транспорта.
На самом деле, мы обогащаем входные эмбеддинги, добавляя данные из GPS-фиксаций (скорость, точность) и различные функции ГИС, такие как расстояния до ближайшего автобусного маршрута, автобусной остановки или железной дороги, рассчитанные для заданных координат.
Рис. 8. Прогноз по скользящему 9-минутному окну (слева) и сообщаемому транспортному режиму с индексом 21 (справа).Знаете ли вы, что Keras позволяет загружать модели в слой TimeDistributed?? В идеале мы могли бы обучить встраивание и классификатор за один раз, но требуемое время выполнения увеличилось, поэтому в итоге мы использовали двухэтапный процесс обучения.
Рисунок 9. Конструкция модели Keras, включающая InceptionTime в качестве слоя TimeDistributed.Шаг 4. Развертывание на Edge
Чтобы запустить модель на устройстве, мы решили использовать tflite . Поскольку мы будем использовать одну и ту же среду выполнения для различных компонентов машинного обучения, наша конструкция достаточно гибкая и напоминает компьютерное определение фон Неймана — приходят новые входные данные и память (состояние), а tflite выводит предсказание и новое состояние.
Поскольку мы будем использовать одну и ту же среду выполнения для различных компонентов машинного обучения, наша конструкция достаточно гибкая и напоминает компьютерное определение фон Неймана — приходят новые входные данные и память (состояние), а tflite выводит предсказание и новое состояние.
В случае нашего транспортного классификатора мы храним вложение последних 30 окон в состоянии, чтобы, учитывая новые данные датчиков, мы могли построить вложение, используя InceptionTime, и передать конкатенированные вложения в U-Time.
Итак, в начале поездки наш SDK собирает 18-секундное окно акселерометра и последнее исправление GPS и передает их вместе с фиктивным состоянием (заполненным -1 с) модели tflite . Он получает классификацию -1 (в течение первых 3 минут) и обновленное состояние. На следующем этапе SDK отвечает за передачу нового окна датчика и предыдущего состояния модели. Обратите внимание, что, поскольку наша модель отстает на 3 минуты, мы использовали метод обучения с подкладкой. Мы продолжаем вызывать модель в течение 3 минут (задавая значения заполнения) после завершения поездки, чтобы получить все классификации.
Обратите внимание, что, поскольку наша модель отстает на 3 минуты, мы использовали метод обучения с подкладкой. Мы продолжаем вызывать модель в течение 3 минут (задавая значения заполнения) после завершения поездки, чтобы получить все классификации.
Возможно, вас интересует влияние батареи по сравнению с моделями, работающими в облаке. Интересно, что запуск модели на устройстве потребляет такое же (а в некоторых случаях даже меньше) количество энергии. Основная причина в том, что нам не нужно отправлять большие объемы данных на серверную часть, что позволяет сэкономить много трафика.
Производительность
При использовании только данных акселерометра со скоростью и точностью из GPS-фиксаций и оценке на проверочном наборе (состоящем из пользователей, которых модель никогда не видела во время обучения) мы достигаем 9Общая точность 1% (для холостого хода, ХОДЬБЫ, БЕГА, ЕЗДЫ НА ВЕЛОСИПЕДЕ, ЖЕЛЕЗНОДОРОЖНОМ СРЕДСТВЕ, ТРАНСПОРТНОМ СРЕДСТВЕ). Мы можем идентифицировать БЕГ, ВЕЛОСИПЕД и ТРАНСПОРТНОЕ СРЕДСТВО с точностью> 95%. Обратите внимание, что используя только сигнал датчика, почти невозможно отличить АВТОМОБИЛЬ и АВТОБУС, поэтому эти классы объединены в один класс — ТРАНСПОРТНОЕ СРЕДСТВО.
Обратите внимание, что используя только сигнал датчика, почти невозможно отличить АВТОМОБИЛЬ и АВТОБУС, поэтому эти классы объединены в один класс — ТРАНСПОРТНОЕ СРЕДСТВО.
Включая функции ГИС (расстояние до ближайшего автобусного маршрута, автобусной остановки, железной дороги и т. д.), которые можно вычислить на устройстве, сохраняя конфиденциальность и запрашивая только фрагменты карты, мы можем разделить АВТОМОБИЛЬ и АВТОБУС, а также отличить ПОЕЗД от ТРАМВАЙ / МЕТРО, сохраняя общую точность на уровне ~ 90%.
Чтобы понять, насколько хорошо он работает в отдельных поездках, давайте рассмотрим некоторые случаи. На рисунке 11 вы можете увидеть три отдельных отключения и прогнозируемую вероятность. Он отображается сверху, показывая, что наши прогнозы стабильны в течение поездки.
Рис. 11. Три индивидуальных мультимодальных рейса. В каждом случае прогнозируемая вероятность вида транспортаотображается вверху, а фактический вид транспорта внизу (фиолетовый — железнодорожный, оранжевый — пешеходный, синий — автомобильный, коричневый — беговой).

В итоге мы можем получить стабильный прогноз, который предотвращает триггеры и, как упоминалось выше, имеет время отклика 3 минуты, что позволяет нам использовать его в более разнообразных приложениях, чем доступные автономные решения.
Выводы
Наличие надежного транспортного классификатора позволяет нам разрабатывать варианты использования во многих различных вертикалях. Чтобы упомянуть некоторые из них, мы можем предоставить информацию о мобильности, отслеживание автопарка, моделирование поведения при вождении и даже обучение образу жизни. Работая полностью на устройстве, мы сохраняем конфиденциальность пользователей, а наличие компонента почти в реальном времени открывает новые возможности — гипер-персонализацию, реагирование на изменения транспорта и т. д.
Мы постоянно совершенствуем наши современные модели. Мы используем неконтролируемый и полуконтролируемый подходы и изучаем возможности добавления дополнительных режимов транспорта и функций на устройстве. В ближайшие пару месяцев мы планируем добавить поддержку двухколесных транспортных средств на устройстве, так что следите за обновлениями.
В ближайшие пару месяцев мы планируем добавить поддержку двухколесных транспортных средств на устройстве, так что следите за обновлениями.
Классификация видов транспорта по глобальным системам позиционирования и данным акселерометра: подход машинного обучения
Понимание моделей поездок имеет решающее значение для планирования транспорта и мониторинга воздействия политики и инфраструктуры. Традиционные методы сбора данных о поездках, такие как опросы о поездках на основе GPS (Stopher, FitzGerald, and Zhang, 2008), склонны к занижению сведений о поездках участников (Bricka and Bhat, 2006). В результате данные датчиков, собираемые приложениями для здоровья на смартфонах или носимых устройствах, стали методом сбора данных о выборе способа передвижения и схемах передвижения.
Исследователи (Чжоу и Ху, 2008 г.; Эллис и др., 2014 г.) обычно используют данные GPS и акселерометрии с носимых устройств для мониторинга состояния здоровья с акселерометром и датчиками GPS, встроенными в одно и то же устройство. Интеграция этих наборов данных с разных платформ является сложной задачей из-за различного пространственно-временного разрешения, которое есть у каждого устройства. Некоторые исследования (Stenneth et al., 2011; Hemminki, Nurmi, and Tarkoma, 2013) продемонстрировали, как древовидные алгоритмы машинного обучения могут применяться к данным GPS, собираемым с частотой 15 секунд для данных GPS с мобильных телефонов и 1,2 с для данных акселерометров для определение режима. Однако существует большой пробел в определении оптимального временного окна, которое можно обобщить для нескольких платформ данных для достижения наивысшего уровня точности прогнозирования, когда речь идет о классификации видов транспорта.
Интеграция этих наборов данных с разных платформ является сложной задачей из-за различного пространственно-временного разрешения, которое есть у каждого устройства. Некоторые исследования (Stenneth et al., 2011; Hemminki, Nurmi, and Tarkoma, 2013) продемонстрировали, как древовидные алгоритмы машинного обучения могут применяться к данным GPS, собираемым с частотой 15 секунд для данных GPS с мобильных телефонов и 1,2 с для данных акселерометров для определение режима. Однако существует большой пробел в определении оптимального временного окна, которое можно обобщить для нескольких платформ данных для достижения наивысшего уровня точности прогнозирования, когда речь идет о классификации видов транспорта.
Цель нашего исследования — продемонстрировать, как классификация данных GPS и акселерометра, собранных с двух разных платформ, по видам транспорта — активному (велосипед/ходьба), частному (автомобиль) и общественному (трамвай/железная дорога/метро) является более точной, когда функции из обоих источников объединены. Мы предполагаем, что точность классификации улучшается, когда данные объединяются с использованием различных размеров окна для фильтрации шума из объединенных данных. С этой целью мы используем контролируемый алгоритм классификации с функцией опорных векторов (SVM) с радиальной базисной функцией.
Мы предполагаем, что точность классификации улучшается, когда данные объединяются с использованием различных размеров окна для фильтрации шума из объединенных данных. С этой целью мы используем контролируемый алгоритм классификации с функцией опорных векторов (SVM) с радиальной базисной функцией.
Мы записали 4071 определяемую пользователем поездку после удаления остановок и пробок у 12 пользователей в течение 6 месяцев с помощью приложения для смартфонов Itinerum (Patterson et al. 2019), которое собирало данные GPS и носимый на запястье акселерометр (GENEActiv 2020). Данные были проанализированы с 1-минутным временным разрешением и включали 93 772 точки данных. Участники были из городов Ванкувер и Сент-Джонс, Канада. Все поездки были предварительно обозначены участниками и разделены на 5 различных режимов передвижения с разной продолжительностью поездки (рис. 1), со средней продолжительностью поездки 24,5 минуты для всех поездок (минимум = 2 минуты, максимум = 62 минуты, велосипед = 37,9). мин, автобус = 21,8 мин, автомобиль = 22,8 мин, надземный поезд = 23,7 мин, пешком = 37,9 мин). Ходьба (n = 964), затем автомобиль (n = 321) были наиболее распространенными способами в наборе данных.
мин, автобус = 21,8 мин, автомобиль = 22,8 мин, надземный поезд = 23,7 мин, пешком = 37,9 мин). Ходьба (n = 964), затем автомобиль (n = 321) были наиболее распространенными способами в наборе данных.
Рисунок 1: Общее количество поездок со средней продолжительностью поездки для каждого вида транспорта
Мы вычислили сводную статистику скорости и величины вектора ускорения – по необработанным данным GPS и акселерометра (таблица 1) и с использованием функций обработки сигналов (таблица 1) для извлечения в общей сложности 37 функций, которые использовались в качестве входных данных для алгоритма SVM. Мы также исследовали различные размеры окна в 3, 5, 7 и 10 секунд, суммируя среднее значение необработанных признаков в каждый период времени, чтобы удалить шум из необработанных данных. Весь анализ был выполнен с использованием R 3.6.1 и ArcGIS© 10.7.1.
Таблица 1: Характеристики, извлеченные из необработанных данных GPS и акселерометра
| Ключевая особенность | Сводные статистические данные | Режим | Описание | Ссылка |
|---|---|---|---|---|
| Расстояние | Среднее, SD, IQR, асимметрия, эксцесс | GPS 902:30 | Евклидово расстояние между последовательными точками GPS на траектории. | Джахангири и Ракха (2014) Фэн и Тиммерманс (2013) Ян и др. (2018) |
| Скорость | Скорость изменения чистого водоизмещения | |||
| Чистое водоизмещение | Квадрат чистого смещения между текущим перемещением и первым перемещением траектории. 902:30 | |||
| Высота | Относительная высота точки на траектории от земли. | |||
| Относительный угол поворота | Относительный угол между последовательными точками GPS на траектории. | |||
| Векторная величина ускорения | Акселерометр | Квадратный корень из квадратов сумм направленных ускорений по осям X, Y и Z. 902:30 | ||
| Пиковая интенсивность ускорения | Макс | Количество появлений пика сигнала (ускорения) за определенный период времени t | Хемминки, Нурми и Таркома (2013) Reddy et al.  (2010) (2010) | |
| Преобладающая частота ускорения | Макс | Пиковое (максимальное) ускорение, полученное после выполнения быстрого преобразования Фурье для сигнала ускорения. 902:30 | ||
| Мощность сигнала ускорения | Иметь в виду | Мгновенная мощность сигнала ускорения – рассчитывается как квадрат величины ускорения в момент времени «t». |
Мы применили контролируемый алгоритм классификации — машины опорных векторов (SVM) к нашему набору входных признаков, чтобы классифицировать режимы движения. SVM, впервые представленные Кортесом и Вапником (1995) активно использовались при интеллектуальном анализе данных для различных целей (Hamel 2011; Li et al. 2011; Anguita et al. 2012) и представляют собой невероятностный двоичный классификатор, который разделяет два класса путем определения оптимальной гиперплоскости разделения. Мы использовали многоклассовое разделение, используя радиальную базисную функцию, чтобы классифицировать все пять способов передвижения путем объединения вероятностей бинарного классификатора (Wu, Lin, and Weng 2004). 70 % данных использовались для обучения модели SVM, а оставшиеся 30 % — для тестирования с 10-кратной повторной перекрестной проверкой с 3 повторениями для 3 комбинаций наборов функций (только GPS, только акселерометр, GPS и акселерометр). С помощью синтетического метода выборки меньшинств (SMOTE) и метода повторной выборки (Чавла и др., 2002 г.) мы учли дисбаланс в поездках между пятью видами транспорта и рассчитали площадь под кривой (ППК) (Ханд и Тилль, 2001 г.) из данных, подвергнутых повторной выборке, в Для проверки средней точности нашей модели мы используем уравнение 1. Оценка AUC измеряет разделимость между оценочными распределениями вероятностей того, что случайно выбранный член одного класса принадлежит к этому конкретному классу по сравнению с другими классами.
Мы использовали многоклассовое разделение, используя радиальную базисную функцию, чтобы классифицировать все пять способов передвижения путем объединения вероятностей бинарного классификатора (Wu, Lin, and Weng 2004). 70 % данных использовались для обучения модели SVM, а оставшиеся 30 % — для тестирования с 10-кратной повторной перекрестной проверкой с 3 повторениями для 3 комбинаций наборов функций (только GPS, только акселерометр, GPS и акселерометр). С помощью синтетического метода выборки меньшинств (SMOTE) и метода повторной выборки (Чавла и др., 2002 г.) мы учли дисбаланс в поездках между пятью видами транспорта и рассчитали площадь под кривой (ППК) (Ханд и Тилль, 2001 г.) из данных, подвергнутых повторной выборке, в Для проверки средней точности нашей модели мы используем уравнение 1. Оценка AUC измеряет разделимость между оценочными распределениями вероятностей того, что случайно выбранный член одного класса принадлежит к этому конкретному классу по сравнению с другими классами.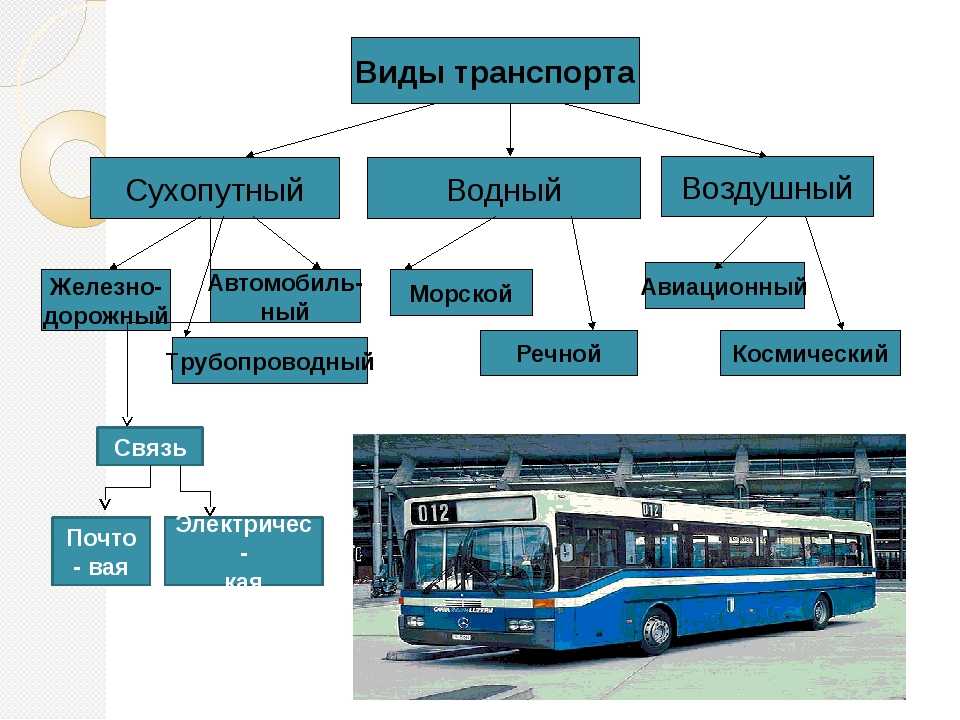
Средняя точность=∑ki=1tpi+tnitpi+tni+fpi+fnik; где k = количество (1) классов, tp = истинно положительный результат, tn = истинно отрицательный результат, fp = ложноположительный результат и fn = ложноотрицательный результат
(Альтман и Бланд, 1994 г.) для каждой моды наряду со сбалансированной точностью (Велес и др., 2008 г.). Наконец, мы визуализируем точность классификации, используя матрицу путаницы для наилучшего сочетания признаков. Наше исследование является доказательством концепции объединения датчиков и размера окна, поэтому мы не сравниваем различные методы машинного обучения.
Мы обнаружили, что точность модели зависит от типа используемых источников данных и размеров окна. Общая точность подобранной модели улучшилась с увеличением размера окна, при этом самая высокая средняя точность (91,1%) была достигнута за счет сочетания функций GPS и акселерометра (таблица 2). Среди всех сценариев размер окна 7 с имел самую низкую дисперсию точности (таблица 2) с использованием SMOTE для учета несбалансированных классов. Функции акселерометра имели самую низкую среднюю точность 55,5%.
Функции акселерометра имели самую низкую среднюю точность 55,5%.
Таблица 2: Изменение точности модели в зависимости от размера окна и типа функций с использованием SVM
| Набор функций | Гиперпараметры SVM: методы = «repeatedcv», k = 10 раз, повторы = 3, повторная выборка = «smote», ядро = «radial» | |||
|---|---|---|---|---|
| Размер окна | Нижний (5% ДИ) | Точность | Верхний (95% ДИ) | |
| GPS | 3 с | 0,642 | 0,689 | 0,734 |
| 5 с | 0,705 | 0,763 | 0,815 | |
| 7 с | 0,727 | 0,794 | 0,852 | |
| 10 с | 0,779 | 0,854 | 0,911 | |
| Акселерометр | 3 с | 0,510 | 0,560 | 0,610 |
| 5 с | 0,4915 | 0,555 | 0,618 | |
| 7 с | 0,495 | 0,571 | 0,646 | |
| 10 с | 0,526 | 0,618 | 0,704 | |
| GPS и акселерометр | 3 с | 0,703 | 0,748 | 0,790 |
| 5 с | 0,758 | 0,812 902:30 | 0,859 | |
| 7 с | 0,856 | 0,909 | 0,947 | |
| 10 с | 0,846 | 0,911 | 0,955 | |
Наилучшее соответствие модели с точностью 90,9% было получено путем объединения данных GPS и акселерометра с окном 7 с. Общая оценка AUC составила 0,9.05 (рис. 2) для всех 5 классов вместе взятых. Максимальная точность (95% ДИ) классификатора SVM в окне 7 с, когда мы подбираем комбинированные функции, показала улучшение почти на 9,5% только с помощью GPS и на 30,1% только с функциями акселерометра соответственно.
Общая оценка AUC составила 0,9.05 (рис. 2) для всех 5 классов вместе взятых. Максимальная точность (95% ДИ) классификатора SVM в окне 7 с, когда мы подбираем комбинированные функции, показала улучшение почти на 9,5% только с помощью GPS и на 30,1% только с функциями акселерометра соответственно.
Рисунок 2: Кривая ROC, показывающая чувствительность и специфичность для различных наборов функций для размера окна 7 с
Матрица путаницы на рисунке 3 показывает точность классификации каждого режима на 30% данных тестирования. В целом виды общественного транспорта были классифицированы наиболее точно (Таблица 3), за ними следует велосипед – после учета несбалансированных данных.
Таблица 3: Оценка точности прогноза для каждого вида транспорта с использованием функций GPS и акселерометра с размером окна 7 с
| Класс | Чувствительность | Специфика | Точность | Отзыв | Ф1 | Сбалансированная точность |
|---|---|---|---|---|---|---|
| Велосипед | 0,857 | 0,952 | 0,774 | 0,857 | 0,814 | 0,905 |
| Автобус | 0,917 | 1. 000 000 | 1.000 | 0,917 | 0,957 902:30 | 0,958 |
| Автомобиль | 0,875 | 0,993 | 0,966 | 0,875 | 0,918 | 0,934 |
| Небесный поезд | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 | 1.000 |
| Прогулка | 0,927 | 0,899 | 0,918 | 0,927 | 0,922 | 0,913 |
Рисунок 3: Матрица путаницы всех режимов движения с использованием тестовых данных для функций GPS и акселерометра с размером окна 7 с
Наша модель является хорошим приближением человеческой мобильности в соответствии с предыдущими исследованиями (Хемминки, Нурми и Таркома, 2013; Видхалм). , Nitsche и Brändie 2012) и будет хорошо работать с аналогичными популяциями. Наши методы можно использовать для информирования планировщиков о наиболее предпочтительных способах передвижения в городе и для понимания того, как способы меняются при вмешательстве с использованием открытых воспроизводимых методов для целей принятия решений.
, Nitsche и Brändie 2012) и будет хорошо работать с аналогичными популяциями. Наши методы можно использовать для информирования планировщиков о наиболее предпочтительных способах передвижения в городе и для понимания того, как способы меняются при вмешательстве с использованием открытых воспроизводимых методов для целей принятия решений.
Авторы хотели бы поблагодарить команду INTERACT за предоставление ценных отзывов и поддержку работы. Исследование поддерживается грантом № IP2-1507071C Канадского института исследований в области здравоохранения. Это исследование было одобрено Междисциплинарным комитетом по этике исследований человека Мемориального университета (20180188-EX).
Альтман Д. Г. и Дж. М. Бланд. 1994. «Статистические примечания: диагностические тесты 1: чувствительность и специфичность». Британский медицинский журнал 308 (6943): 1552. https://doi.org/10.1136/bmj.308.6943.1552.
Google Scholar
PubMed Central
PubMed
Ангуита, Давиде, Алессандро Гио, Лука Онето, Ксавьер Парра и Хорхе Л. Рейес-Ортис. 2012. «Распознавание человеческой деятельности на смартфонах с использованием мультиклассовой аппаратно-дружественной машины опорных векторов». In International Workshop on Ambient Assisted Living , 216–23. Берлин, Гейдельберг: Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-642-35395-6_30.
Рейес-Ортис. 2012. «Распознавание человеческой деятельности на смартфонах с использованием мультиклассовой аппаратно-дружественной машины опорных векторов». In International Workshop on Ambient Assisted Living , 216–23. Берлин, Гейдельберг: Springer Berlin Heidelberg. https://doi.org/10.1007/978-3-642-35395-6_30.
Google Scholar
Брика, Стейси и Чандра Р. Бхат. 2006. «Сравнительный анализ данных на основе глобальной системы позиционирования и данных, основанных на опросах о путешествиях». Запись транспортных исследований: Журнал Совета транспортных исследований 1972 (1): 9–20. https://doi.org/10.1177/0361198106197200102.
Google Scholar
Чавла, Н. В., К. В. Бойер, Л. О. Холл и В. П. Кегельмейер. 2002. «SMOTE: метод избыточной выборки синтетического меньшинства». Журнал исследований искусственного интеллекта 16 (июнь): 321–57. https://doi.org/10.1613/jair.953.
Google Scholar
Кортес, Коринна и Владимир Вапник. 1995. «Сети опорных векторов». Машинное обучение 20 (3): 273–97. https://doi.org/10.1007/bf00994018.
1995. «Сети опорных векторов». Машинное обучение 20 (3): 273–97. https://doi.org/10.1007/bf00994018.
Google Scholar
Эллис, Кэтрин, Сунита Годбол, Саймон Маршалл, Герт Ланкрит, Джон Стауденмайер и Жаклин Керр. 2014. «Выявление активного поведения при путешествии в сложных условиях с использованием GPS, акселерометров и алгоритмов машинного обучения». Frontiers in Public Health 2 (апрель): 36. https://doi.org/10.3389/fpubh.2014.00036.
Google Scholar
PubMed Central
PubMed
Фэн, Тао и Гарри Дж. П. Тиммерманс. 2013. «Распознавание режима транспортировки с использованием данных GPS и акселерометра». Transportation Research Part C: Emerging Technologies 37 (декабрь): 118–30. https://doi.org/10.1016/j.trc.2013.09.014.
Google Scholar
«Устройство акселерометра GENEActiv». 2020. https://www.activinsights.com/products/geneactiv/.
2020. https://www.activinsights.com/products/geneactiv/.
Hamel, LH 2011. Обнаружение знаний с помощью машин опорных векторов . Том. 3. Джон Уайли и сыновья.
Google Scholar
Хэнд, Д.Дж. и Р.Дж. До. 2001. «Простое обобщение площади под кривой ROC для задач классификации нескольких классов». Машинное обучение 45 (2): 171–86.
Google Scholar
Хемминки, Самули, Петтери Нурми и Сасу Таркома. 2013. «Обнаружение режима транспортировки на смартфонах на основе акселерометра». В Материалы 11-й конференции ACM по встраиваемым сетевым сенсорным системам — SenSys ’13 , 1–14. АКМ Пресс. https://doi.org/10.1145/2517351.2517367.
Google Scholar
Джахангири А. и Х. Ракха. 2014. «Разработка классификатора машины опорных векторов (SVM) для идентификации режима транспортировки с использованием данных датчика мобильного телефона». На 93-м ежегодном собрании Совета по транспортным исследованиям , 14:1442.
Google Scholar
Ли, Ченг-Сюань, Бор-Чен Куо, Чин-Тэн Линь и Чжи-Шен Хуанг. 2011. «Пространственно-контекстная машина опорных векторов для дистанционной классификации изображений». IEEE Transactions on Geoscience and Remote Sensing 50 (3): 784–99. https://doi.org/10.1109/tgrs.2011.2162246.
Google Scholar
Паттерсон, Закари, Кайл Фицсиммонс, Стюарт Джексон и Такеши Мукаи. 2019. «Itinerum: открытая платформа для исследования путешествий с помощью смартфона». SoftwareX 10 (июль): 100230. https://doi.org/10.1016/j.softx.2019.04.002.
Google Scholar
Редди, Сасанк, Мин Мун, Джефф Бёрк, Дебора Эстрин, Марк Хансен и Мани Шривастава. 2010. «Использование мобильных телефонов для определения видов транспорта». Транзакции ACM в сенсорных сетях 6 (2): 1–27. https://doi.org/10.1145/1689239.1689243.
Google Scholar
Стеннет, Леон, Оури Вольфсон, Филип С. Ю и Бо Сюй. 2011. «Обнаружение режима транспортировки с использованием мобильных телефонов и информации ГИС». В Трудах 19-й Международной конференции ACM SIGSPATIAL по достижениям в области географических информационных систем — GIS ’11 , 54–63. АКМ Пресс. https://doi.org/10.1145/2093973.2093982.
Ю и Бо Сюй. 2011. «Обнаружение режима транспортировки с использованием мобильных телефонов и информации ГИС». В Трудах 19-й Международной конференции ACM SIGSPATIAL по достижениям в области географических информационных систем — GIS ’11 , 54–63. АКМ Пресс. https://doi.org/10.1145/2093973.2093982.
Академия Google
Стофер, Питер, Камден Фитцджеральд и Цзюнь Чжан. 2008. «Поиск устройства глобальной системы позиционирования для измерения перемещения человека». Transportation Research Part C: Emerging Technologies 16 (3): 350–69. https://doi.org/10.1016/j.trc.2007.10.002.
Google Scholar
Велес, Д.Р. и другие. 2008. «Сбалансированная функция точности для моделирования эпистаза в несбалансированных наборах данных с использованием многофакторного уменьшения размерности». Генетическая эпидемиология 4: 306.
Google Scholar
Видхалм П. , П. Ницше и Н. Бренди. 2012. «Обнаружение режима транспортировки с использованием реалистичных данных датчика смартфона». В материалах 21-й Международной конференции по распознаванию образов (ICPR2012) , 573–76. IEEE.
, П. Ницше и Н. Бренди. 2012. «Обнаружение режима транспортировки с использованием реалистичных данных датчика смартфона». В материалах 21-й Международной конференции по распознаванию образов (ICPR2012) , 573–76. IEEE.
Google Scholar
Ву, Т.Ф., Си Джей Лин и Р.К. Венг. 2004. «Оценки вероятности для многоклассовой классификации с помощью попарной связи». Journal of Machine Learning Research 5 (август): 975–1005.
Академия Google
Ян, Сюэ, Кэтлин Стюарт, Лулян Тан, Чжун Се и Цинцюань Ли. 2018. «Обзор классификации траекторий GPS на основе вида транспорта». Датчики 18 (11): 3741. https://doi.org/10.3390/s18113741.
Google Scholar
PubMed Central
PubMed
Zhou, Huiyu и Huosheng Hu. 2008. «Отслеживание движения человека для реабилитации — исследование».