МАЯТНИК | это… Что такое МАЯТНИК?
твёрдое тело, совершающее под действием приложенных сил колебания около неподвижной точки или вокруг оси. Обычно под М. понимают тело, совершающее колебания под действием силы тяжести; при этом ось М. не должна проходить через центр тяжести тела. Простейший М. состоит из небольшого массивного груза С, подвешенного на нити (или лёгком стержне) длиной l. Если считать нить нерастяжимой и пренебречь размерами груза по сравнению с длиной нити, а массой нити по сравнению с массой груза, то груз на нити можно рассматривать как материальную точку, находящуюся на неизменном расстоянии l от точки подвеса О (рис. 1, а). Такой М. наз. м а т е м а т и ч е с к и м. Если же колеблющееся тело нельзя рассматривать как материальную точку, то М. наз. ф и з и ч е с к и м.
Рис. 1. Маятники: а — круговой математический; б — физический.
Математический маятник. Если М., отклонённый от равновесного положения C0, отпустить без нач. скорости или сообщить точке С скорость, направленную перпендикулярно ОС и лежащую в плоскости нач.
Т=2p?(l/g),
где g — ускорение свободного падения; в этом случае период Т не зависит от амплитуды, т. е. колебания изохронны.
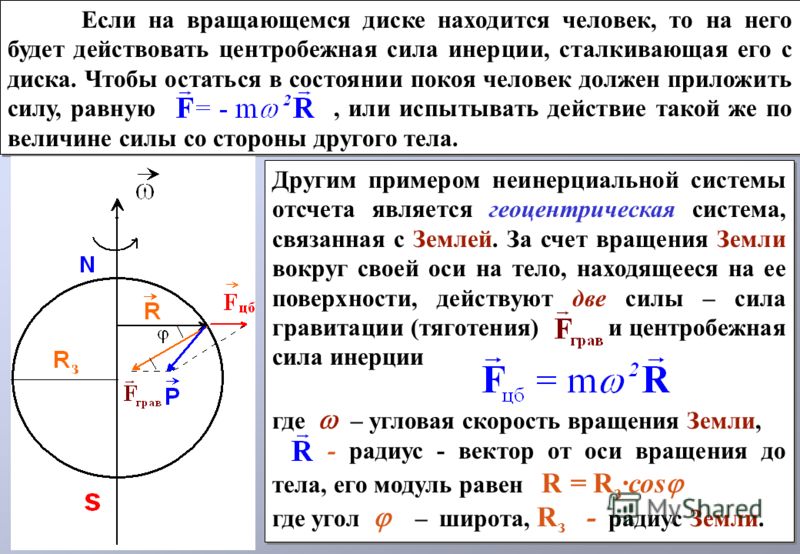
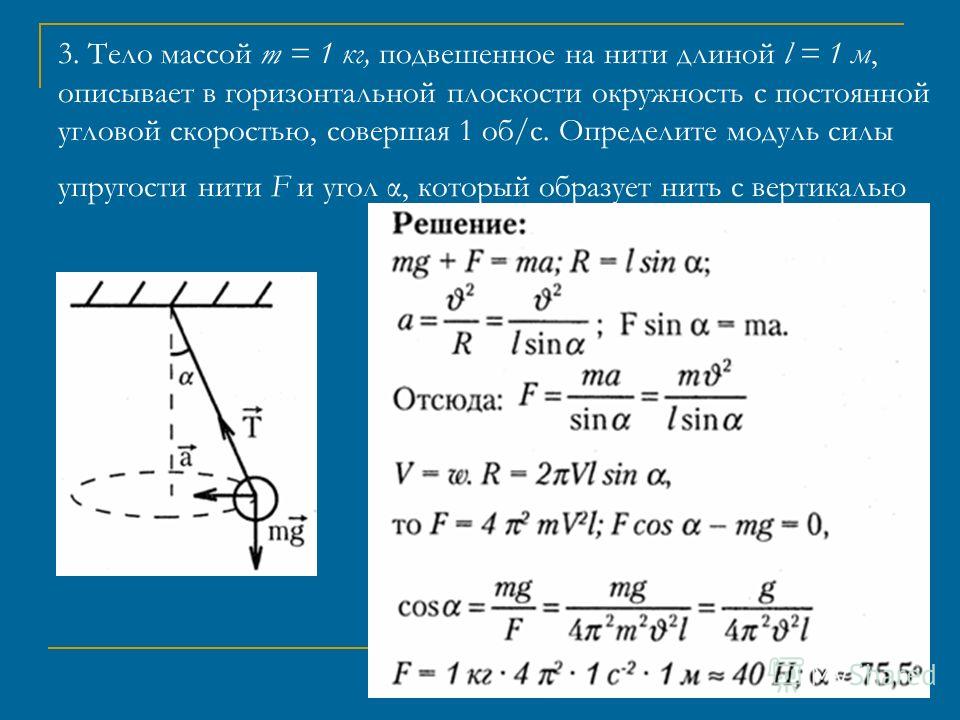
Если отклонённому М. сообщить нач. скорость, не лежащую в плоскости начального отклонения, то точка С будет описывать на сфере радиуса l кривые, заключённые между двумя параллелями z=z1 и z=z2 (рис. 2, а), где значения z1 и z2 зависят от нач. условий (сферический М.). В частном случае, при z1=z2 (рис. 2, б) точка С будет описывать окружность в горизонтальной плоскости (конический М.). Интерес представляет ещё циклоидальный маятник, колебания к-рого изохронны при любой величине амплитуды.
Рис. 2. Маятники: а — сферический; б — конический.
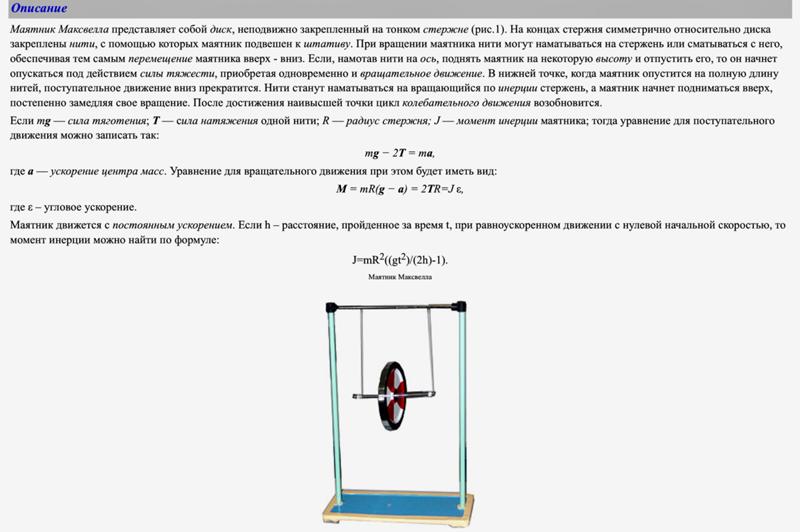
Физический маятник. М. представляет собой тв. тело, совершающее под действием силы тяжести колебания вокруг горизонтальной оси подвеса (рис. 1, б). Движение такого М. вполне аналогично движению кругового математич. М. При малых углах отклонения j М. также совершает колебания, близкие к гармоническим, с периодом:
Т=2p?(I/Mgl),
где I — момент инерции М. относительно оси подвеса, l — расстояние от оси подвеса О до центра тяжести С, М — масса М. Следовательно, период колебаний физ. М. совпадает с периодом колебаний такого математич. М., к-рый имеет длину l0=I/Мl. Эта длина наз. приведённой длиной данного физ. М.
Точка К на продолжении прямой ОС, находящаяся на расстоянии l0 от оси подвеса, наз. центром качаний физ. М. При этом расстояние ОK=l0 всегда больше, чем ОС=l, Точка О оси подвеса М. и центр качания обладают св-вом взаимности; если ось подвеса сделать проходящей через центр качаний, то точка О прежней оси подвеса станет новым центром качаний и период колебаний М. не изменится. Это св-во взаимности используется в оборотном маятнике для определения приведённой длины l0; зная l0 и Т, можно найти значение g в данном месте.
не изменится. Это св-во взаимности используется в оборотном маятнике для определения приведённой длины l0; зная l0 и Т, можно найти значение g в данном месте.
Св-вами М. широко пользуются в разл. приборах: в часах, в приборах для определения ускорения силы тяжести, ускорений движущихся тел, колебаний земной коры, в гироскопич. устройствах, в приборах для эксперим. определения момента инерции тел и др. (см. ФУКО МАЯТНИК).
Физический энциклопедический словарь. — М.: Советская энциклопедия. Главный редактор А. М. Прохоров. 1983.
Маятник | это… Что такое Маятник?
твёрдое тело, совершающее под действием приложенных сил колебания около неподвижной точки или оси. В физике под М. обычно понимают М., совершающий колебания под действием силы тяжести; при этом его ось не должна проходить через центр тяжести тела. Простейший М. состоит из небольшого массивного груза C, подвешенного на нити (или лёгком стержне) длиной l. Если считать нить нерастяжимой и пренебречь размерами груза по сравнению с длиной нити, а массой нити по сравнению с массой груза, то груз на нити можно рассматривать как материальную точку, находящуюся на неизменном расстоянии l от точки подвеса O (рис. 1, а). Такой М. называется математическим. Если же, как это обычно имеет место, колеблющееся тело нельзя рассматривать как материальную точку, то М. называется физическим.
Если считать нить нерастяжимой и пренебречь размерами груза по сравнению с длиной нити, а массой нити по сравнению с массой груза, то груз на нити можно рассматривать как материальную точку, находящуюся на неизменном расстоянии l от точки подвеса O (рис. 1, а). Такой М. называется математическим. Если же, как это обычно имеет место, колеблющееся тело нельзя рассматривать как материальную точку, то М. называется физическим.
Математический маятник. Если М., отклоненный от равновесного положения C0, отпустить без начальной скорости или сообщить точке C скорость, направленную перпендикулярно OC и лежащую в плоскости начального отклонения, то М. будет совершать колебания в одной вертикальной плоскости по дуге окружности (плоский, или круговой математический М.). В этом случае положение М. определяется одной координатой, например углом φ, на который М. отклонен от положения равновесия. В общем случае колебания М. не являются гармоническими; их период T зависит от амплитуды. Если же отклонения М. малы, он совершает колебания, близкие к гармоническим, с периодом:
не являются гармоническими; их период T зависит от амплитуды. Если же отклонения М. малы, он совершает колебания, близкие к гармоническим, с периодом:
,
где g — ускорение свободного падения; в этом случае период T не зависит от амплитуды, то есть колебания изохронны.
Если отклонённому М. сообщить начальную скорость, не лежащую в плоскости начального отклонения, то точка C будет описывать на сфере радиуса l кривые, заключённые между 2 параллелями z = z1 и z = z2 (рис. 2, а), где значения z1 и z2 зависят от начальных условий (сферический маятник). В частном случае, при z1 = z2 (рис. 2, б) точка C будет описывать окружность в горизонтальной плоскости (конический маятник). Из некруговых М. особый интерес представляет Циклоидальный маятник, колебания которого изохронны при любой величине амплитуды.
Из некруговых М. особый интерес представляет Циклоидальный маятник, колебания которого изохронны при любой величине амплитуды.
Физический маятник. Физическим М. обычно называется твёрдое тело, совершающее под действием силы тяжести колебания вокруг горизонтальной оси подвеса (рис. 1, б). Движение такого М. вполне аналогично движению кругового математического М. При малых углах отклонения φ М. также совершает колебания, близкие к гармоническим, с периодом
,
где I — Момент инерции М. относительно оси подвеса, l — расстояние от оси подвеса O до центра тяжести C, M — масса М. Следовательно, период колебаний физического М. совпадает с периодом колебаний такого математического М., который имеет длину l0 = I/Ml. Эта длина называется приведённой длиной данного физического М.
Точка K на продолжении прямой OC, находящаяся на расстоянии l0 от оси подвеса, называется центром качаний физ. М. При этом расстояние OK = l0 всегда больше, чем OC = l. Точка O оси подвеса М. и центр качаний обладают свойством взаимности: если ось подвеса сделать проходящей через центр качаний, то точка O прежней оси подвеса станет новым центром качаний и период колебаний М. не изменится. Это свойство взаимности используется в оборотном маятнике (См. Оборотный маятник) для определения приведённой длины l0; зная l0 и T, можно найти значение g в данном месте.
М. При этом расстояние OK = l0 всегда больше, чем OC = l. Точка O оси подвеса М. и центр качаний обладают свойством взаимности: если ось подвеса сделать проходящей через центр качаний, то точка O прежней оси подвеса станет новым центром качаний и период колебаний М. не изменится. Это свойство взаимности используется в оборотном маятнике (См. Оборотный маятник) для определения приведённой длины l0; зная l0 и T, можно найти значение g в данном месте.
Свойствами М. широко пользуются в различных приборах: в часах, в приборах для определения ускорения силы тяжести (см. Маятниковый прибор), ускорений движущихся тел, колебаний земной коры (см. Сейсмограф), в гироскопических устройствах (См. Гироскопические устройства), в приборах для экспериментального определения моментов инерции тел и других. См. также Фуко маятник.
Лит. : Бухгольц Н. Н., Основной курс теоретической механики, ч. 1, М., 1967, § 38, пп. 5, 13, 14; ч. 2, М., 1969, § 12, п. 4; Тарг С. М., Краткий курс теоретической механики, 7 изд., М., 1970, гл. 28, § 155; Хайкин С. Э., Физические основы механики, 2 изд., М., 1971, гл. 13, § 90, 91.
: Бухгольц Н. Н., Основной курс теоретической механики, ч. 1, М., 1967, § 38, пп. 5, 13, 14; ч. 2, М., 1969, § 12, п. 4; Тарг С. М., Краткий курс теоретической механики, 7 изд., М., 1970, гл. 28, § 155; Хайкин С. Э., Физические основы механики, 2 изд., М., 1971, гл. 13, § 90, 91.
С. М. Тарг.
Рис. 1. Маятники: а — круговой математитческий маятник; б — физический маятник.
Рис. 2. Маятники: а — сферический маятник; б — конический маятник.
Влияние многоосной подвески на воздействие вибрации всего тела и физическую нагрузку на шею и нижнюю часть спины при использовании сельскохозяйственных тракторов
. 2018 апр;68:80-89.
doi: 10.1016/j.apergo.2017.10.021. Epub 2017 11 ноября. Чон Хо Ким 1 , Джек Т. Деннерляйн 2 , Питер В. Джонсон 3
Деннерляйн 2 , Питер В. Джонсон 3
Принадлежности
- 1 Гигиена окружающей среды и труда, Колледж общественного здравоохранения и гуманитарных наук, Университет штата Орегон, Корваллис, штат Орегон, США. Электронный адрес: [email protected].
- 2 Кафедра физиотерапии, движений и реабилитации, Колледж медицинских наук Буве, Северо-восточный университет, Бостон, Массачусетс, США.
- 3 Департамент наук об окружающей среде и гигиене труда, Школа общественного здравоохранения, Вашингтонский университет, Сиэтл, Вашингтон, США.
- PMID: 29409658
- DOI:
10.
 1016/j.apergo.2017.10.021
1016/j.apergo.2017.10.021
Чон Хо Ким и др. Аппл Эргон. 2018 9 апр.0003
. 2018 апр;68:80-89.
doi: 10.1016/j.apergo.2017.10.021. Epub 2017 11 ноября.
Авторы
Чон Хо Ким 1 , Джек Т. Деннерляйн 2 , Питер В. Джонсон 3
Принадлежности
- 1 Экология и гигиена труда, Колледж общественного здравоохранения и гуманитарных наук, Университет штата Орегон, Корваллис, штат Орегон, США. Электронный адрес: [email protected].
- 2 Кафедра физиотерапии, движений и реабилитации, Колледж медицинских наук Буве, Северо-восточный университет, Бостон, Массачусетс, США.

- 3 Департамент наук об окружающей среде и гигиене труда, Школа общественного здравоохранения, Вашингтонский университет, Сиэтл, Вашингтон, США.
- PMID: 29409658
- DOI: 10.1016/j.apergo.2017.10.021
Абстрактный
Воздействие вибрации всего тела (WBV) часто преобладает в продольной (x) или поперечной (y) оси среди внедорожных сельскохозяйственных транспортных средств. Тем не менее, поскольку современные отраслевые стандартные сиденья предназначены для уменьшения воздействия WBV в основном по вертикальной (z) оси, они могут быть менее эффективными в снижении воздействия многоосевого WBV на водителей. Таким образом, это лабораторное исследование было направлено на определение различий между одноосным (вертикальным) и многоосным (вертикальным + боковым) сиденьем с подвеской в снижении воздействия WBV, ускорения головы, субъективного дискомфорта и мышечной активности (электромиография). основных мышц поясницы, шеи и плеч. Результаты показали, что сиденье с многоосной подвеской имело значительно более низкие воздействия WBV по сравнению с сиденьями с одноосной подвеской (p’<0,04). Точно так же сиденье с многоосной подвеской имело меньшее ускорение головы и мышечную активность шеи, плеч и нижней части спины по сравнению с сиденьем с одноосной подвеской; некоторые, но не все различия были статистически значимыми. Эти результаты показывают, что сиденье с многоосевой подвеской может уменьшить боковое воздействие WBV и связанную с ним мышечную нагрузку на шею и нижнюю часть спины у операторов сельскохозяйственных транспортных средств.
Таким образом, это лабораторное исследование было направлено на определение различий между одноосным (вертикальным) и многоосным (вертикальным + боковым) сиденьем с подвеской в снижении воздействия WBV, ускорения головы, субъективного дискомфорта и мышечной активности (электромиография). основных мышц поясницы, шеи и плеч. Результаты показали, что сиденье с многоосной подвеской имело значительно более низкие воздействия WBV по сравнению с сиденьями с одноосной подвеской (p’<0,04). Точно так же сиденье с многоосной подвеской имело меньшее ускорение головы и мышечную активность шеи, плеч и нижней части спины по сравнению с сиденьем с одноосной подвеской; некоторые, но не все различия были статистически значимыми. Эти результаты показывают, что сиденье с многоосевой подвеской может уменьшить боковое воздействие WBV и связанную с ним мышечную нагрузку на шею и нижнюю часть спины у операторов сельскохозяйственных транспортных средств.
Ключевые слова: сельскохозяйственные тракторы; электромиография; внедорожники; подвеска сиденья; Вибрация всего тела.
Copyright © 2017 Elsevier Ltd. Все права защищены.
Похожие статьи
Рандомизированное контролируемое испытание вмешательства в сиденье грузовика: Часть 1 — Оценка воздействия вибрации всего тела.
Джонсон П.В., Зигман М., Ибботсон Дж., Деннерлейн Дж.Т., Ким Дж.Х. Джонсон П.У. и соавт. Энн Ворк Экспо Здоровье. 2018 15 октября; 62 (8): 990-999. doi: 10.1093/annweh/wxy062. Энн Ворк Экспо Здоровье. 2018. PMID: 30016417 Клиническое испытание.
Воздействие вибрации на все тело среди профессиональных водителей автобусов и грузовиков: лабораторная оценка конструкций подвески сидений.
Blood RP, Yost MG, Camp JE, Ching RP. РП крови и др. J Occup Environ Hyg. 2015;12(6):351-62.
 дои: 10.1080/15459624.2014.989357.
J Occup Environ Hyg. 2015.
PMID: 25625530
дои: 10.1080/15459624.2014.989357.
J Occup Environ Hyg. 2015.
PMID: 25625530Оценка сидений с вертикальной и многоосевой подвеской для уменьшения преобладающей вертикальной и многоосевой вибрации всего тела и связанного с ней крутящего момента шеи и поясничного отдела позвоночника, а также мышечной активности.
Kia K, Bae HT, Johnson PW, Dennerlein JT, Kim JH. Киа К. и др. Эргономика. 2022 Декабрь; 65 (12): 1696-1710. дои: 10.1080/00140139.2022.2051611. Epub 2022 16 марта. Эргономика. 2022. PMID: 35257643
Оценка имеющихся в продаже подвесок сидений для снижения воздействия вибрации на все тело операторов тяжелой горнодобывающей техники.
Ким Дж. Х., Марин Л. С., Деннерляйн Дж. Т. Ким Дж. Х. и др.
 Аппл Эргон. 2018 сен;71:78-86. doi: 10.1016/j.apergo.2018.04.003. Epub 2018 27 апр.
Аппл Эргон. 2018.
PMID: 29764617
Аппл Эргон. 2018 сен;71:78-86. doi: 10.1016/j.apergo.2018.04.003. Epub 2018 27 апр.
Аппл Эргон. 2018.
PMID: 29764617Анализ возможных деформаций нижней части поясницы, вызванных структурными свойствами автомобильных сидений: обзор некоторых последних технических публикаций.
Джонсон Д.А., Нев М. Джонсон Д.А. и соавт. J Manipulative Physiol Ther. 2001 ноябрь-декабрь; 24(9):582-8. doi: 10.1067/mmt.2001.118984. J Manipulative Physiol Ther. 2001. PMID: 11753332 Обзор.
Посмотреть все похожие статьи
Цитируется
Ощущение дискомфорта и нервно-мышечной усталости при длительной реальной езде с использованием различных автомобильных сидений.
Лекок М.
 , Лантуан П., Бугар С., Аллегр Ж.М., Бовино Л., Гонсалес Д., Бурден С., Маркест Т., Дуссе Э.
Лекок М. и соавт.
ПЛОС Один. 12 декабря 2022 г .; 17 (12): e0278131. doi: 10.1371/journal.pone.0278131. Электронная коллекция 2022.
ПЛОС Один. 2022.
PMID: 36508433
Бесплатная статья ЧВК.
, Лантуан П., Бугар С., Аллегр Ж.М., Бовино Л., Гонсалес Д., Бурден С., Маркест Т., Дуссе Э.
Лекок М. и соавт.
ПЛОС Один. 12 декабря 2022 г .; 17 (12): e0278131. doi: 10.1371/journal.pone.0278131. Электронная коллекция 2022.
ПЛОС Один. 2022.
PMID: 36508433
Бесплатная статья ЧВК.Воздействие вибрации на все тело, передаваемое водителям большегрузных транспортных средств: сравнительный случай в соответствии с методологиями оценки краткосрочного и долгосрочного воздействия, определенными в ISO 2631-1 и ISO 2631-5.
де ла Ос-Торрес М.Л., Агилар А.Дж., Руис Д.П., Мартинес-Айрес М.Д. де ла Хоз-Торрес М.Л. и соавт. Общественное здравоохранение Int J Environ Res. 2022 25 апреля; 19 (9): 5206. дои: 10.3390/ijerph29095206. Общественное здравоохранение Int J Environ Res. 2022. PMID: 35564605 Бесплатная статья ЧВК.
Влияние автокресла на поведение водителя при сидении и ощущение дискомфорта при длительной реальной езде по разным типам дорог.

Лантуан П., Лекок М., Бугар С., Дуссе Э., Маркест Т., Бурден С., Аллегре Ж.М., Бовино Л., Мезюр С. Лантуан П. и др. ПЛОС Один. 2021 16 ноября; 16 (11): e0259934. doi: 10.1371/journal.pone.0259934. Электронная коллекция 2021. ПЛОС Один. 2021. PMID: 34784401 Бесплатная статья ЧВК.
Влияние вибрации всего тела на физиологические стрессы: применение тяжелого горнодобывающего оборудования.
Kia K, Fitch SM, Newsom SA, Kim JH. Киа К. и др. Аппл Эргон. 2020 Май; 85:103065. doi: 10.1016/j.apergo.2020.103065. Epub 2020 1 февраля. Аппл Эргон. 2020. PMID: 32174353 Бесплатная статья ЧВК.
Исследование методом конечных элементов влияния низкочастотной вибрации, создаваемой при вождении автомобиля, на механические свойства поясничного отдела позвоночника человека.

Fan RX, Liu J, Li YL, Liu J, Gao JZ. Fan RX и др. Биомед Рез Инт. 2018 30 сентября; 2018:7962414. дои: 10.1155/2018/7962414. Электронная коллекция 2018. Биомед Рез Инт. 2018. PMID: 30364013 Бесплатная статья ЧВК.
 Давняя модель в CarSim предназначена для определения положения и ориентации оси рулевого управления, а для смещения рейки подразумевается поворот вокруг этой оси. Поворот вокруг оси немного регулируется с учетом схождения. Этот подход удобен для пользователей, но требует четкого определения оси поворота в системе отсчета колесной балки. У многих подвесов эта ось не зафиксирована ни в одной системе отсчета. Скорее управляемая ось — это мгновенная конструкция — виртуальная рулевая ось .
Давняя модель в CarSim предназначена для определения положения и ориентации оси рулевого управления, а для смещения рейки подразумевается поворот вокруг этой оси. Поворот вокруг оси немного регулируется с учетом схождения. Этот подход удобен для пользователей, но требует четкого определения оси поворота в системе отсчета колесной балки. У многих подвесов эта ось не зафиксирована ни в одной системе отсчета. Скорее управляемая ось — это мгновенная конструкция — виртуальная рулевая ось .
