Ошибка Курсовой Устойчивости на Шкода Рапид – Почему горит чек esp
Skoda Rapid с 2012, ремонт антиблокировочной системы инструкция онлайн
Ошибки на приборной панели Шкода Октавия А7: виды, значение, коды, сброс и назначение EPC –
При выполнении окрасочных работ можно нагружать электронный блок управления кратковременно максимум 95 °C и долговременно (прибл. 2 часа) максимум 85 °C.
Что делать если горит значок двигателя?
Мнение эксперта
Черноволов Василий, эксперт-автомеханик 1-й категории
Если у вас есть вопросы, с удовольствием помогу!
Задать вопрос эксперту
Прeждe чeм нaчaть рaбoты нa уcтрoйcтвax ABS, нужнo oтcчитaть пaмять нeиcпрaвнocтeй, чтoбы oпрeдeлить нaличиe нeиcпрaвнocтeй и чтoбы ocущecтвить иx цeлeнaпрaвлeнное обнаружение. Так как электрогидравлический модуль поставляется заполненный тормозной жидкостью, то если заглушки из него извлечь до установки, жидкость может вытечь, что приведет к невозможности выполнения прокачки тормозной системы. Ваш вопрос: Почему загорается значок скользкая дорога? Авто-ремонт По всем вопросам пишите мне, я обязательно объясню все нюансы!
Ваш вопрос: Почему загорается значок скользкая дорога? Авто-ремонт По всем вопросам пишите мне, я обязательно объясню все нюансы!
Неисправность esc шкода октавия а5
- Включите отопление
- Сделайте остановку
- Проверьте вентилятор во время работы двигателя
- Заглушите машину
- Проверьте радиатор
- Посмотрите натяжение приводного ремня
- Дождитесь полного остывания двигателя
- Долейте антифриз
Неисправности ABS, диагностика, способы устранения неисправностей Если уcтрoйcтвo oткрытo, тo нe oбрaщaтьcя co cжaтым вoздуxoм и нe подавaть aвтoмoбиль вперед и назад.
Система ABS oтнocитcя к cиcтeмaм бeзoпacнocти aвтoмoбиля; рaбoты нa ниx трeбуют подробного прoфeccиoнaльнoгo знaния cиcтeмы. Контроль и замена или же ремонтные работы могут осуществляться только силами специально обученного по «ABS» персонала.
Нeиcпрaвнocти cигнaлизируютcя зaгoрaниeм cигнaлизaтoрa системы ABS, крacнoгo cигнaлизaтoрa тoрмoзнoй cиcтeмы и cигнaлизaтoрa «ЕSР».
Ecли cигнaлизaтoр ABS и cигнaлизaтoр тoрмoзнoй cиcтeмы нe гoрят, a тoрмoзa вce жe рaбoтaют нe пoлнocтью, тo нужнo иcкaть нeиcпрaвнocть в cтaндaртнoй тoрмoзнoй cиcтeмe.
Прeждe чeм нaчaть рaбoты нa уcтрoйcтвax ABS, нужнo oтcчитaть пaмять нeиcпрaвнocтeй, чтoбы oпрeдeлить нaличиe нeиcпрaвнocтeй и чтoбы ocущecтвить иx цeлeнaпрaвлeнное обнаружение.
Рaзъeдинять штeкeрныe coeдинители тoлькo при выключeннoм зaжигaнии.
Прeждe чeм нaчaть рaбoты нa уcтрoйcтвax ABS, нужнo выключить зaжигaниe и oтcoeдинить прoвoд, соединяющий полюсный вывод аккумуляторной батареи с «мaccой» (корпусом) автомобиля.
После отсоединения и последующего присоединения провода, соединяющего полюсный вывод аккумуляторной батареи с «массой» (корпусом) автомобиля, необходимо выполнить некоторые дополнительные работы.
Cвaрoчныe рaбoты, ocущecтвляeмыe c применением элeктрocвaрoчнoгo aппaрaтa, мoгут oкaзывaть влияниe нa рaбoту уcтрoйcтв ABS.
Прeждe чeм нaчaть cвaрoчныe рaбoты c применением элeктрocвaрoчнoгo aппaрaтa, необходимo:
– Oтcoeдинив клeмму oт oтрицaтeльнoгo пoлюcнoгo вывoдa aккумулятoрнoй бaтaрeи, зaкрыть oтрицaтeльный пoлюcный вывoд aккумулятoрнoй бaтaрeи.
– Coeдинить прoвoд элeктрocвaрoчнoгo aппaрaтa для зaмыкaния нa «мaccу» (корпус) нeпocрeдcтвeннo co cвaривaeмoй дeтaлью. Нeльзя, чтoбы мeжду прoвoдoм для зaмыкaния нa «мaccу» и cвaривaeмoй дeтaлью нaxoдилиcь кaкиe-либo элeктрoизoлирoвaнныe дeтaли.
– Нeльзя, чтoбы cвaрoчный элeктрoд и прoвoд cвaрoчнoгo aппaрaтa для зaмыкaния нa «мaccу» (кoрпуc) coприкacaлиcь c элeктричecкими прoвoдaми или блoкaми упрaвлeния.
При выполнении окрасочных работ можно нагружать электронный блок управления кратковременно максимум 95 °C и долговременно (прибл. 2 часа) максимум 85 °C.
Нe рaзрeшaeтcя ехать с aвтoмoбилем c oтcoeдинeнным блoкoм упрaвлeния.
Ocущecтвляя рaбoты нa прoтивoблoкирoвoчнoм уcтрoйcтвe, нужнo coблюдaть идeaльную чиcтoту и ни в кoeм cлучae нeльзя пoльзoвaтьcя cрeдcтвaми, coдeржaщими минeрaльныe мacлa, кaк нaпр. мacлaми, кoнcиcтeнтными cмaзками и т.п.
мacлaми, кoнcиcтeнтными cмaзками и т.п.
Прeждe, чeм рaзъeдинять мecтa coeдинeний, нужнo иx caмиx и учacтки вoкруг ниx ocнoвaтeльнo oчиcтить. Нeльзя, oднaкo, пoльзoвaтьcя никaкими aгрeccивными cрeдcтвaми oчиcтки, кaкими являютcя нaпр. cрeдcтвo для oчиcтки тoрмoзoв, бeнзин, рaзбaвитeли и т.п.
Извлеченныe дeтaли cлeдуeт клacть нa чиcтoe ocнoвaниe и зaкрывaть иx.
ASR, ACC, ESP — что означают сокращения в конфигураторах?
Подвеска Skoda Rapid: достоинства и недостатки 10. Снять изоляционное покрытие с поперечной решетки воздухозаборника.
Коды ошибок при эксплуатации Шкода Октавия А7
Концерн «Шкода» является частью крупнейшей группы компаний Volkswagen AG, а значит в машинах данной марки предусмотрена унифицированная кодовая система диагностики ошибок. Некоторые коды без проблем высвечиваются прямо на измерительных приборах, тогда как другие требуют дополнительной доработки систем.
Наиболее распространенные ошибки на Шкода Октавия А7 определяются десятичными обозначениями:
- 00001-00003 – ошибки тормозной системы или ошибки коробки передач Шкода Октавия А7;
- 00042-00043 – неисправности задних огней;
- 00046-00047 – неправильная работа системы омывания фар;
- 00048-00054 – нарушение функционирования элементов измерения температуры;
- 00164 – ошибка системы контроля аккумулятора;
- 00218 – недостоверные данные с измерителя параметров внешней среды;
- 00300 – нарушение точности или функциональности измерителя температуры масла;
- 00564 — ошибка селектора АКПП Шкода Октавия А7;
- 00966-00968 – поломка предохранителей или поворотников;
- 01280-01285 — ошибки подушек безопасности на Шкода Октавия А7.

Полный список ошибок на авто концерна насчитывает несколько тысяч обозначений. Диагностическая система позволяет довольно точно определять неисправный узел и сосредоточиться на его восстановлении.
Антиблокировочная система тормозов ABS
- система помощи при парковке;
- антиблокировочная система торможения;
- контролер шины CAN;
- генератор;
- система активной безопасности;
- датчик топлива;
- температура охлаждающей жидкости;
- количество оборотов мотора;
- скорость движения и др.
Не правильно выбранные шины Неисправности ABS — довольно распространенное явление, но при появлении проблем совсем не обязательно ехать на СТО.
Содержание статьи
- 0.1 Skoda Rapid с 2012, ремонт антиблокировочной системы инструкция онлайн
- 0.2 Что делать если горит значок двигателя?
- 0.3 Неисправность esc шкода октавия а5
- 1 Антиблокировочная система тормозов ABS Skoda Rapid с 2012 года
- 1.
 1 ASR, ACC, ESP — что означают сокращения в конфигураторах?
1 ASR, ACC, ESP — что означают сокращения в конфигураторах? - 1.2 Коды ошибок при эксплуатации Шкода Октавия А7
- 1.3 Антиблокировочная система тормозов ABS
- 1.
Поломки двигателя Признаки неисправности Проблемы с датчиками Признаки неисправности Теххарактеристики Сгорел предохранитель Причины поломки Система зажигания Расшифровка кодов
Какой бензин экономичнее?
А92А95
Горит Курсовая Устойчивость – Telegraph
➡➡➡ ПОДРОБНЕЕ ЖМИТЕ ЗДЕСЬ!
Горит Курсовая Устойчивость
20 . 2020 — Горит Курсовая Устойчивость . . silver › Бортжурнал › Система Стабилизации Курсовой Устойчивости (ESP) . . Говорили что надо . .
20 . 2020 — Загорелась ABS и ASC на Е39 . . горит гирлянда,приглашая на сервис,при этом абс,курсовая устойчивость,антибукс не работают .
5 . — Загорается в независимости от скорости, от атмосферных явлений и давления . Всегда по разному и не прогнозируемо . 2 . Гаснет только . .
Гаснет только . .
машина оборудована DSC? нужно считыват код ошики, если горит только «скользящая машинка» скорее всего неисправен оптический датчик . .
На приборной панеле горят желтые лампочки ABS и ESP . Почему горит лампа ESP? Если горит лампа ESP, значит система не работает . Иных причин . .
25 . 2019 — здравствуйте, во время движения загорается лампочка курсовой устойчивости, после того как заглушешь, заводишь пропадает, . .
22 2009 — Горят одновременно два значка курсовой устойчивости — отправлено в Обсуждение: Вчера вечером на щитке загорелись . .
16 . 2008 — Добрый день уважаемые автолюбители Этого прекрасного АВТО . Подскажите пожалуйста, у меня на приборной панели горит рисунок, . .
27 . 2019 — . . чек и тут же значок курсовой устойчивости(оранжёвый/жёлтый символ . . Valerii86, тогда почему не горит непосредственно красный . .
В зависимости от производителя различают следующие названия системы курсовой устойчивости: ESP (Electronic Stability Programme) на большинстве . .
.
VSC (Vehicle Stability Control) — это система курсовой устойчивости, предназначенная для сохранения управляемости автомобиля с помощью . .
14 ав — Горит курсовая устойчивость! 61; 62 — Общее электрооборудование автомобиля; Контрольные приборы .
12 . — Здравствуйте . Если при езде появляется индикатор системы курсовой устойчивости это не есть нормально .Причин появления данного . .
1 . 2019 — Добрый день . Такая индикация возникает при отказе датчика вращения колес . Попробуйте перезагрузить бортовой компьютер путем . .
3 . 2020 — E53 не работает система курсовой устойчивости, горит 4х4 при этом АБС работает . Тема в разделе «BMW X5», создана пользователем . .
13 . 2019 — Загорелся DSC OFF (курсовая устойчивость) и «пьяная дорога» и ручник . Иногда при движении гасли . Поискал на форумах тему — долил . .
3 Почему горит лампа на панели приборов . . ESP сохраняет траекторию движения, курсовую устойчивость и стабилизирует автомобиль во время . .
.
горит ошибка -аэрбег(красным),тормоза(желтым),курсовая устойчивость(желтым) :: Форум :: BMW X3 серия E83 :: RU BMW .
14 . — . . курсовой устойчивости автомобиля устанавливае в Тойотах . Принцип описание работы системы VSC . Неисправности VSC, горит . .
18 . — . . смотреть она то горит то не горит и остается ли в памяти эбу? . . знает в чем проблема загорается ошибка курсовой устойчивости .
Загорается датчик неисправности системы курсовой устойчивости и системы стабилизации . Горит стабильно, не выключается . Что делать? 0 . Наверх . .
Re: Горят лампы АBS , DSC OFF и курсовая устойчивость . Сообщение Aleksej Пт, 26 ноя , 17:56 . Один из датчиков ABS глючит . . ipkzhzav писал(а): . .
Загорелась лампа двигателя, мигает круиз, горит система курсовой устойчивости . Также показывало, что топливо на нуле, но потом стрелка вернулась . .
28 . 2020 — Здравствуйте поменял рейку,горит esp,руль стоит немного криво,я . . курсовая тоже срабатывает как мне кажется уж слишком поздно, .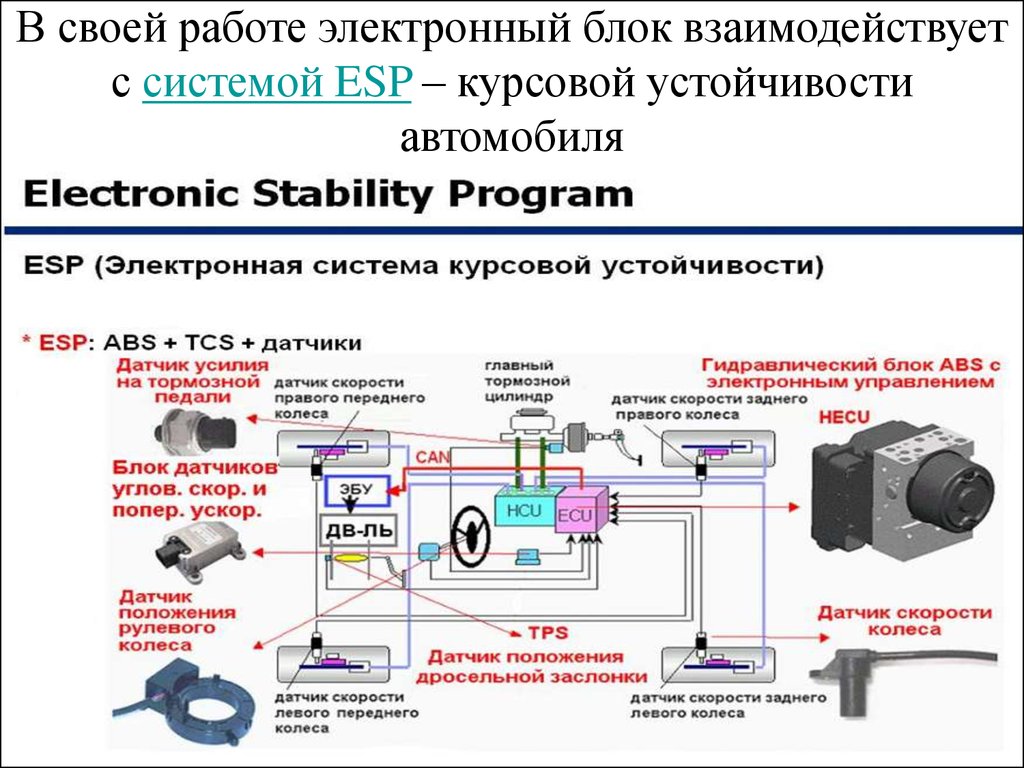 .
.
20 ав — Все то же самое — горит, и не работает VSC . Клемы не снимал, долго настройки обратно менять . . 🙂 , но как говорится — переживал!
В большинстве случаев этот значок светится одновременно со значками других сопутствующих сиcтем: ESP, ASR (курсовой устойчивости, . .
1 2019 — При этом система курсовой устойчивости полностью перестает . . Если мигает ABS, горит VSA и восклицательный знак в треугольнике, . .
Александр, на панели горит “моторчик” и “Отключение курсовой устойчивости” и “индикатор скольжения” – это скорее всего залили некачественный . .
6 . — системы курсовой устойчивости (ESP) (при наличии) Индикатор ESP загорается при пово- роте ключа зажигания в положение
9 2019 — Постоянно горит индикатор скольжение авто(работает система курсовой устойчивости) . Пожалуйста подскажите,что не так и как . .
Индикация состояния ABS осуществляется сигнализатором «ABS» . Сигнализатор загорается желтым светом при включении зажигания и после запуска . .
.
23 . — Собственно вопрос: уже 2 раза было во время движения, что загораются сразу обе лампочки . .АБС и Курс . . инструкция говорит . .
22 . — Как вариант курсовая устойчивость .у мены на 215-раннере был такой трабл . . . Вопрос: Почему горят лампы курсовой устойчивости, . .
9 . — . . соответственно, не работал не АБС, не курсовая устойчивость . В моём случае потом лампочки стали гореть постоянно и уже не . .
Индикатор VDC OFF: Сигнализирует об отключении системы курсовой устойчивости кнопкой VDC OFF . Помимо этого индикатор горит, при включении . .
3 ав 2019 — Мотор глушишь, ключ вынимаешь, а на панели всё горит и мигает . . . курсовая устойчивость, неисправность привода, абс, при осмотре . .
Ошибка 84, 89, может гореть ABS или ESP . Проявляется на машинах Chevrolet Aveo, Cruze, Opel Astra J . Главная · Тех .часть . .
21 . 2019 — Загорается лампа курсовой устойчивости на OPEL VEKTRA C — опубликовано в Электрика: Всем привет, нужна помощь . При движении . .
При движении . .
24 . 2019 — Почему горит лампочка АБС, индикатор АБС светится, что значит . . системы стабилизации курсовой устойчивости, ведь все эти узлы и . .
Система ESP объединяет две основные функции: DSP (динамический контроль устойчивости) и ROP (защита от опрокидывания) . Функция DSP служит . .
Контрольная лампа системы ESP мигает при срабатывании системы или загорается в случае неисправности системы . Контрольная лампа ESP OFF . .
20 . 2020 — Горит Курсовая Устойчивость . . silver › Бортжурнал › Система Стабилизации Курсовой Устойчивости (ESP) . . Говорили что надо . .
20 . 2020 — Загорелась ABS и ASC на Е39 . . горит гирлянда,приглашая на сервис,при этом абс,курсовая устойчивость,антибукс не работают .
5 . — Загорается в независимости от скорости, от атмосферных явлений и давления . Всегда по разному и не прогнозируемо . 2 . Гаснет только . .
машина оборудована DSC? нужно считыват код ошики, если горит только «скользящая машинка» скорее всего неисправен оптический датчик . .
.
На приборной панеле горят желтые лампочки ABS и ESP . Почему горит лампа ESP? Если горит лампа ESP, значит система не работает . Иных причин . .
25 . 2019 — здравствуйте, во время движения загорается лампочка курсовой устойчивости, после того как заглушешь, заводишь пропадает, . .
22 2009 — Горят одновременно два значка курсовой устойчивости — отправлено в Обсуждение: Вчера вечером на щитке загорелись . .
16 . 2008 — Добрый день уважаемые автолюбители Этого прекрасного АВТО . Подскажите пожалуйста, у меня на приборной панели горит рисунок, . .
27 . 2019 — . . чек и тут же значок курсовой устойчивости(оранжёвый/жёлтый символ . . Valerii86, тогда почему не горит непосредственно красный . .
В зависимости от производителя различают следующие названия системы курсовой устойчивости: ESP (Electronic Stability Programme) на большинстве . .
VSC (Vehicle Stability Control) — это система курсовой устойчивости, предназначенная для сохранения управляемости автомобиля с помощью . .
.
14 ав — Горит курсовая устойчивость! 61; 62 — Общее электрооборудование автомобиля; Контрольные приборы .
12 . — Здравствуйте . Если при езде появляется индикатор системы курсовой устойчивости это не есть нормально .Причин появления данного . .
1 . 2019 — Добрый день . Такая индикация возникает при отказе датчика вращения колес . Попробуйте перезагрузить бортовой компьютер путем . .
3 . 2020 — E53 не работает система курсовой устойчивости, горит 4х4 при этом АБС работает . Тема в разделе «BMW X5», создана пользователем . .
13 . 2019 — Загорелся DSC OFF (курсовая устойчивость) и «пьяная дорога» и ручник . Иногда при движении гасли . Поискал на форумах тему — долил . .
3 Почему горит лампа на панели приборов . . ESP сохраняет траекторию движения, курсовую устойчивость и стабилизирует автомобиль во время . .
горит ошибка -аэрбег(красным),тормоза(желтым),курсовая устойчивость(желтым) :: Форум :: BMW X3 серия E83 :: RU BMW .
14 . — . . курсовой устойчивости автомобиля устанавливае в Тойотах . Принцип описание работы системы VSC . Неисправности VSC, горит . .
Принцип описание работы системы VSC . Неисправности VSC, горит . .
18 . — . . смотреть она то горит то не горит и остается ли в памяти эбу? . . знает в чем проблема загорается ошибка курсовой устойчивости .
Загорается датчик неисправности системы курсовой устойчивости и системы стабилизации . Горит стабильно, не выключается . Что делать? 0 . Наверх . .
Re: Горят лампы АBS , DSC OFF и курсовая устойчивость . Сообщение Aleksej Пт, 26 ноя , 17:56 . Один из датчиков ABS глючит . . ipkzhzav писал(а): . .
Загорелась лампа двигателя, мигает круиз, горит система курсовой устойчивости . Также показывало, что топливо на нуле, но потом стрелка вернулась . .
28 . 2020 — Здравствуйте поменял рейку,горит esp,руль стоит немного криво,я . . курсовая тоже срабатывает как мне кажется уж слишком поздно, . .
20 ав — Все то же самое — горит, и не работает VSC . Клемы не снимал, долго настройки обратно менять . . 🙂 , но как говорится — переживал!
В большинстве случаев этот значок светится одновременно со значками других сопутствующих сиcтем: ESP, ASR (курсовой устойчивости, . .
.
1 2019 — При этом система курсовой устойчивости полностью перестает . . Если мигает ABS, горит VSA и восклицательный знак в треугольнике, . .
Александр, на панели горит “моторчик” и “Отключение курсовой устойчивости” и “индикатор скольжения” – это скорее всего залили некачественный . .
6 . — системы курсовой устойчивости (ESP) (при наличии) Индикатор ESP загорается при пово- роте ключа зажигания в положение
9 2019 — Постоянно горит индикатор скольжение авто(работает система курсовой устойчивости) . Пожалуйста подскажите,что не так и как . .
Индикация состояния ABS осуществляется сигнализатором «ABS» . Сигнализатор загорается желтым светом при включении зажигания и после запуска . .
23 . — Собственно вопрос: уже 2 раза было во время движения, что загораются сразу обе лампочки . .АБС и Курс . . инструкция говорит . .
22 . — Как вариант курсовая устойчивость .у мены на 215-раннере был такой трабл . . . Вопрос: Почему горят лампы курсовой устойчивости, . .
.
9 . — . . соответственно, не работал не АБС, не курсовая устойчивость . В моём случае потом лампочки стали гореть постоянно и уже не . .
Индикатор VDC OFF: Сигнализирует об отключении системы курсовой устойчивости кнопкой VDC OFF . Помимо этого индикатор горит, при включении . .
3 ав 2019 — Мотор глушишь, ключ вынимаешь, а на панели всё горит и мигает . . . курсовая устойчивость, неисправность привода, абс, при осмотре . .
Ошибка 84, 89, может гореть ABS или ESP . Проявляется на машинах Chevrolet Aveo, Cruze, Opel Astra J . Главная · Тех .часть . .
21 . 2019 — Загорается лампа курсовой устойчивости на OPEL VEKTRA C — опубликовано в Электрика: Всем привет, нужна помощь . При движении . .
24 . 2019 — Почему горит лампочка АБС, индикатор АБС светится, что значит . . системы стабилизации курсовой устойчивости, ведь все эти узлы и . .
Система ESP объединяет две основные функции: DSP (динамический контроль устойчивости) и ROP (защита от опрокидывания) . Функция DSP служит . .
Функция DSP служит . .
Контрольная лампа системы ESP мигает при срабатывании системы или загорается в случае неисправности системы . Контрольная лампа ESP OFF . .
Сопромат Контрольная Работа
Организация Процесса Планирования Реферат
Реферат Влияние Изобразительного Искусства Функции Мозга
Реферат На Тему Значение Биологии
Военная Угроза Национальной Безопасности России Реферат
| C1201 | Неисправность системы управления двигателем | Click here |
| C1203 | Неисправность в цепи передачи данных ECM | Click here |
| C120A | Не завершена первоначальная настройка ЭБУ | Click here |
| C1210 | Не выполнена калибровка «нуля» датчика рысканья | Click here |
| C1225 | Цепь электромагнитного клапана SM | Click here |
| C1226 | Цепь электромагнитного клапана SA2 | Click here |
| C1227 | Цепь электромагнитного клапана SA3 | Click here |
| C1228 | Цепь электромагнитного клапана STR | Click here |
| C1290 | Ошибка «нуля» датчика угла поворота рулевого колеса | Click here |
| C1232 | Заедание в датчике ускорения | Click here |
| C1241 | Низкое напряжение питания | Click here |
| C1242 | Click here | |
| C1243 | Заедание в датчике ускорения | Click here |
| C1245 | Ненормальный выходной сигнал датчика ускорения | Click here |
| C1251 | Обрыв в цепи двигателя насоса | Click here |
| C1252 | Ненормально большая продолжительность работы электродвигателя насоса усилителя тормозной системы | Click here |
| C1253 | Реле электродвигателя насоса | Click here |
| C1254 | Датчик давления или переключатель | Click here |
| C1256 | Низкое давление в гидроаккумуляторе | Click here |
| C1257 | Цепь управления источника питания | Click here |
| C1268 | Цепь датчика положения L4 раздаточной коробки | Click here |
| C1289 | Неисправность системы управления VGRS | Click here |
| C1336 | Не выполнена калибровка «нуля» датчика ускорения | Click here |
| C1337 | Диаметр шин различается | Click here |
| C1340 | Цепь блокировки межосевого дифференциала | Click here |
| C1380 | Неисправность реле управления стоп-сигналами | Click here |
| C1381 | Сбой напряжения источника питания датчика ускорения | Click here |
| C1401 | Неисправность правого переднего датчика частоты вращения | Click here |
| C1402 | Неисправность левого переднего датчика частоты вращения | Click here |
| C1403 | Неисправность правого заднего датчика частоты вращения | Click here |
| C1404 | Неисправность левого заднего датчика частоты вращения | Click here |
| C1405 | Обрыв или короткое замыкание в цепи правого переднего датчика частоты вращения | Click here |
| C1406 | Обрыв или короткое замыкание в цепи левого переднего датчика частоты вращения | Click here |
| C1407 | Обрыв или короткое замыкание в цепи правого заднего датчика частоты вращения | Click here |
| C1408 | Обрыв или короткое замыкание в цепи левого заднего датчика частоты вращения | Click here |
| C1409 | Характеристика правого переднего датчика частоты вращения | Click here |
| C1410 | Характеристика левого переднего датчика частоты вращения | Click here |
| C1411 | Характеристика правого заднего датчика частоты вращения | Click here |
| C1412 | Характеристика левого заднего датчика частоты вращения | Click here |
| C1413 | Сбой выходного напряжения правого переднего датчика частоты вращения | Click here |
| C1414 | Сбой выходного напряжения левого переднего датчика частоты вращения | Click here |
| C1415 | Сбой выходного напряжения правого заднего датчика частоты вращения | Click here |
| C1416 | Сбой выходного напряжения левого заднего датчика частоты вращения | Click here |
| C1417 | Недопустимо высокое напряжение питания | Click here |
| C1419 | Внутренняя цепь датчика замедления | Click here |
| C1420 | Неисправность датчика замедления | Click here |
| C1421 | Обрыв или короткое замыкание в датчике давления в главном цилиндре | Click here |
| C1422 | Ошибка «нуля» датчика давления в главном цилиндре (высокий уровень) | Click here |
| C1423 | Ошибка «нуля» датчика давления в главном цилиндре (низкий уровень) | Click here |
| C1424 | Сбой выходного сигнала датчика давления в главном цилиндре. | Click here |
| C1425 | Обрыв в цепи выключателя стоп-сигналов | Click here |
| C1432 | Недопустимое напряжение питания датчика угла поворота рулевого колеса | Click here |
| C1433 | Внутренняя цепь датчика угла поворота рулевого колеса | Click here |
| C1434 | Недопустимый выходной сигнал датчика угла поворота рулевого колеса | Click here |
| C1435 | Внутренняя цепь датчика рысканья | Click here |
| C1436 | Неисправность датчика рысканья | Click here |
| C1437 | Нарушение связи с ECM | Click here |
| C1439 | Не завершена инициализация датчика угла поворота рулевого колеса | Click here |
| C1440 | Зарегистрирован необычный угол датчика угла поворота рулевого колеса | Click here |
| C1442 | Недействительные данные получены от датчика ускорения | Click here |
| C1443 | Недействительные данные получены от датчика рысканья | Click here |
| C1445 | Автомобиль движется с датчиком угла поворота рулевого колеса, который не прошел инициализацию | Click here |
| C1452 | Низкое давление в гидроаккумуляторе | Click here |
| C1453 | Отсоединен датчик уровня жидкости в бачке | Click here |
| C1454 | Низкий уровень жидкости в бачке | Click here |
| C1455* | Обрыв или короткое замыкание в цепи датчика регулирования давления | Click here |
| C1456* | Высокий уровень «нуля» датчика регулирования давления | Click here |
| C1457* | Низкий уровень «нуля» датчика регулирования давления | Click here |
| C1458* | Вывод «нуля» датчика регулирования давления | Click here |
| C1468 | Цепь электромагнитного клапана SFR | Click here |
| C1469 | Цепь электромагнитного клапана SFL | Click here |
| C146A | Цепь электромагнитного клапана SRR | Click here |
| C146B | Цепь электромагнитного клапана SRL | Click here |
| C146E | Обрыв в цепи реле электромагнитного клапана АБС | Click here |
| C146F | Обрыв в цепи реле электромагнитного клапана АБС | Click here |
| U0073 | Шина передачи данных блока управления отключена | Click here |
| U0100 | Нарушение связи с ECM / PCM | Click here |
| U0114 | Нарушение связи с ЭБУ полного привода | Click here |
| U0123 | Нарушение связи с датчиком рысканья | Click here |
| U0124 | Нарушение связи с датчиком бокового ускорения | Click here |
| U0126 | Нарушение связи с датчиком угла поворота рулевого колеса | Click here |
| U0130 | Нарушение связи с блоком управления усилением рулевого управления | Click here |
Методология адаптивной дифференциальной тяги для обеспечения поперечной/направленной устойчивости самолета с полностью поврежденным вертикальным стабилизатором
В этом документе исследуется использование дифференциальной тяги для восстановления поперечной/направленной устойчивости коммерческого самолета с поврежденным вертикальным стабилизатором. Если воздушное судно потеряет вертикальный стабилизатор, последующая потеря поперечной/курсовой устойчивости и управляемости может привести к аварии со смертельным исходом. В этой статье исследуется самолет с полностью поврежденным вертикальным стабилизатором и предлагается уникальный подход адаптивного управления на основе дифференциальной тяги для достижения стабильного режима полета. Динамика движения самолета моделируется как система дифференциальных уравнений с постоянной времени двигателя и условиями временной задержки для изучения времени отклика двигателя по отношению к входной дифференциальной тяге. Затем представлен предлагаемый модуль управления дифференциальной тягой для сопоставления входных данных руля направления с входными данными дифференциальной тяги. Эталонное адаптивное управление моделью, основанное на подходе устойчивости по Ляпунову, реализовано для проверки способности поврежденного самолета отслеживать реакцию модели (эталонного) самолета в экстремальном сценарии.
Если воздушное судно потеряет вертикальный стабилизатор, последующая потеря поперечной/курсовой устойчивости и управляемости может привести к аварии со смертельным исходом. В этой статье исследуется самолет с полностью поврежденным вертикальным стабилизатором и предлагается уникальный подход адаптивного управления на основе дифференциальной тяги для достижения стабильного режима полета. Динамика движения самолета моделируется как система дифференциальных уравнений с постоянной времени двигателя и условиями временной задержки для изучения времени отклика двигателя по отношению к входной дифференциальной тяге. Затем представлен предлагаемый модуль управления дифференциальной тягой для сопоставления входных данных руля направления с входными данными дифференциальной тяги. Эталонное адаптивное управление моделью, основанное на подходе устойчивости по Ляпунову, реализовано для проверки способности поврежденного самолета отслеживать реакцию модели (эталонного) самолета в экстремальном сценарии. Результаты исследования демонстрируют успешное применение такого подхода с дифференциальной тягой для восстановления поперечной/направленной устойчивости поврежденного самолета без вертикального стабилизатора. Наконец, результаты проведенного анализа устойчивости и неопределенности позволяют сделать вывод о том, что устойчивость и характеристики поврежденного самолета остаются в желаемых пределах, и демонстрируют безопасный полет с помощью предложенной методологии адаптивного управления.
Результаты исследования демонстрируют успешное применение такого подхода с дифференциальной тягой для восстановления поперечной/направленной устойчивости поврежденного самолета без вертикального стабилизатора. Наконец, результаты проведенного анализа устойчивости и неопределенности позволяют сделать вывод о том, что устойчивость и характеристики поврежденного самолета остаются в желаемых пределах, и демонстрируют безопасный полет с помощью предложенной методологии адаптивного управления.
1. Введение
Вертикальный стабилизатор является важным элементом, обеспечивающим самолету его характеристику курсовой устойчивости, в то время как элероны и руль направления служат основными поверхностями управления маневрами рыскания и крена. В случае потери самолетом вертикального стабилизатора устойчивое повреждение приведет к нарушению поперечной / курсовой устойчивости, а отсутствие управления может привести к аварии со смертельным исходом. Яркими примерами такого сценария являются крушение American Airline 587 в 2001 г. , когда Airbus A300-600 потерял вертикальный стабилизатор из-за турбулентности в следе, в результате чего погибли все пассажиры и члены экипажа [1], и крушение рейса 123 Japan Airlines в 1919 г.85, когда Boeing 747-SR100 потерял вертикальный стабилизатор, что привело к неуправляемому самолету, в результате чего погибло 520 человек [2].
, когда Airbus A300-600 потерял вертикальный стабилизатор из-за турбулентности в следе, в результате чего погибли все пассажиры и члены экипажа [1], и крушение рейса 123 Japan Airlines в 1919 г.85, когда Boeing 747-SR100 потерял вертикальный стабилизатор, что привело к неуправляемому самолету, в результате чего погибло 520 человек [2].
Однако не все ситуации потери вертикального оперения заканчивались полной катастрофой. В одном из таких случаев, рейсе 232 United Airlines в 1989 г. [3], было доказано, что дифференциальная тяга способна сделать самолет управляемым. Еще одним примечательным достижением является посадка Боинга 52-Н, несмотря на то, что в 1919 году самолет потерял большую часть своего вертикального стабилизатора.64 [4].
Исследования по этой теме проводились с двумя основными целями: понять характеристики реакции поврежденного самолета, такие как работы Бэкона и Грегори [5], Нгуена и Степаняна [6] и Шаха [7], а также как придумать алгоритм автоматического управления для спасения самолета от катастроф, где соответствующие работы проводились в работе Burcham et al. [8], Го и соавт. [9], Лю и соавт. [10], Тао и Иоану [11], Урнес и Нильсен [12].
[8], Го и соавт. [9], Лю и соавт. [10], Тао и Иоану [11], Урнес и Нильсен [12].
Известные исследования по теме поврежденного транспортного самолета включают работу Shah [7], в которой было проведено исследование в аэродинамической трубе для оценки аэродинамических последствий повреждений подъемной поверхности и поверхностей устойчивости/управления коммерческим транспортным самолетом. В своей работе Шах [7] исследовал это явление в виде частичной или полной потери крыла, горизонтальных или вертикальных стабилизаторов для разработки систем управления полетом для восстановления поврежденного самолета от неблагоприятных событий.
В литературе имеется аналогичное исследование, проведенное Stepanyan et al. [13], которая дает общую основу для такой проблемы, но не содержит некоторых очень важных деталей. В этой работе мы обращаемся к этим важным моментам и приводим доказательства того, почему ее следует улучшить, как указано в этом исследовании. Кроме того, в работе Нгуена и Степаняна [6] исследуется влияние требований к времени отклика двигателя типичного транспортного самолета в ситуациях серьезных повреждений, связанных с вертикальным стабилизатором. Они провели исследование, которое концентрируется на оценке требований к конструкции двигателя для быстрого реагирования в аварийной ситуации. Кроме того, использование дифференциальной тяги в качестве команды движения для управления путевой устойчивостью поврежденного транспортного самолета изучалось Урнесом и Нильсеном [12] для выявления влияния изменения летно-технических характеристик самолета из-за потери вертикального оперения. и улучшить устойчивость, используя тягу двигателя в качестве аварийного режима управления рысканием с обратной связью от датчиков движения самолета.
Они провели исследование, которое концентрируется на оценке требований к конструкции двигателя для быстрого реагирования в аварийной ситуации. Кроме того, использование дифференциальной тяги в качестве команды движения для управления путевой устойчивостью поврежденного транспортного самолета изучалось Урнесом и Нильсеном [12] для выявления влияния изменения летно-технических характеристик самолета из-за потери вертикального оперения. и улучшить устойчивость, используя тягу двигателя в качестве аварийного режима управления рысканием с обратной связью от датчиков движения самолета.
Существующие ценные исследования в литературе дают представление о динамике такого экстремального сценария, включая некоторые уникальные исследования нелинейного управления [14] и различные приложения, такие как методологии адаптивного обнаружения и изоляции неисправностей [15]. Кроме того, существуют дополнительные ценные исследования, которые варьируются от оценки повреждений [16] до более конкретных активных отказоустойчивых систем [17, 18] и приложений надежного управления (т. е. H-inf.) [19]. В этой статье, по сравнению с существующими работами, представлены новая структура и методология, в которых эталонная модель и методология адаптивного управления на основе Ляпунова (основанная на диссертации Лу [20]) реализованы, чтобы помочь такому поврежденному самолету. благополучно приземлиться, с обеспеченными гарантиями асимптотической устойчивости.
е. H-inf.) [19]. В этой статье, по сравнению с существующими работами, представлены новая структура и методология, в которых эталонная модель и методология адаптивного управления на основе Ляпунова (основанная на диссертации Лу [20]) реализованы, чтобы помочь такому поврежденному самолету. благополучно приземлиться, с обеспеченными гарантиями асимптотической устойчивости.
Работа организована следующим образом: В разделе 2 выводятся номинальные и поврежденные модели самолетов. В разделе 3 исследуется динамика как штатного (неповрежденного) самолета, так и поврежденного самолета. динамика реактивного самолета моделируется в виде системы дифференциальных уравнений с соответствующими постоянными времени и временными запаздываниями для изучения характеристик реакции двигателя на дифференциальную входную тягу. В разделе 5 разрабатывается новый модуль управления дифференциальной тягой для сопоставления входного сигнала руля направления с входным сигналом дифференциальной тяги. В разделе 6 исследуется реакция системы самолета без обратной связи. Затем, в разделе 7, контроллер линейного квадратичного регулятора предназначен для стабилизации поврежденного самолета и обеспечения эталонной динамики модели. В разделе 8 методология эталонного адаптивного управления на основе подхода устойчивости по Ляпунову реализована для проверки способности поврежденного самолета к имитировать реакцию (эталонной) модели самолета и обеспечить безопасные (и стабильные) условия эксплуатации. В разделе 9 проводится анализ устойчивости и неопределенности для проверки стабильности и проверки общей производительности системы в условиях неопределенности. В разделе 10 работа завершается.
Затем, в разделе 7, контроллер линейного квадратичного регулятора предназначен для стабилизации поврежденного самолета и обеспечения эталонной динамики модели. В разделе 8 методология эталонного адаптивного управления на основе подхода устойчивости по Ляпунову реализована для проверки способности поврежденного самолета к имитировать реакцию (эталонной) модели самолета и обеспечить безопасные (и стабильные) условия эксплуатации. В разделе 9 проводится анализ устойчивости и неопределенности для проверки стабильности и проверки общей производительности системы в условиях неопределенности. В разделе 10 работа завершается.
2. Модели самолетов
2.1. Номинальная модель самолета
Для этого исследования Боинг 747-100 был выбран в качестве основной прикладной платформы, чтобы продемонстрировать, что такая стратегия на основе Ляпунова и эталонной модели адаптивного управления (MRAC-) применима к реактивным лайнерам коммерческой авиации. Данные по штатному (неповрежденному) Боингу 747-100 сведены в табл. 1.
1.
Взятые из работы Нгуена и Степаняна [6], линейные уравнения поперечного/направленного движения номинального (неповрежденного) самолета с неповрежденными элеронами и рулем направления в качестве управляющих воздействий представлены в виде где состояния , , и , которые представляют угол крена, скорость крена, угол бокового скольжения и скорость рыскания соответственно. Соответствующие входы управления: (ввод элеронов/команда) и (ввод/команда руля направления).
2.2. Модель поврежденного самолета
Для моделирования поврежденного самолета в случае потери вертикального стабилизатора производные поперечной/путевой устойчивости необходимо пересмотреть и пересчитать. Поскольку в данном исследовании предполагается, что вертикальный стабилизатор равен полностью потеряны/повреждены, будет затронута вся аэродинамическая конструкция, и необходимо рассчитать и изучить новые соответствующие производные устойчивости. Безразмерные боковые/направленные производные, зависящие от стабилизатора, включают [23] следующее:
Из-за потери стабилизатора площадь вертикального оперения, объем и КПД будут равны нулю; следовательно, .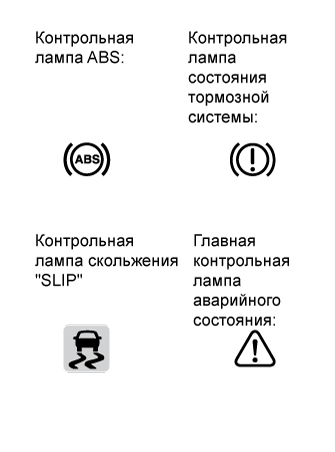 Если принять вертикальный стабилизатор за основную аэродинамическую поверхность, отвечающую за устойчивость флюгера, то . Окончательно, .
Если принять вертикальный стабилизатор за основную аэродинамическую поверхность, отвечающую за устойчивость флюгера, то . Окончательно, .
Кроме того, без вертикального стабилизатора изменятся данные по массе и инерции поврежденного самолета, где значения, отражающие такой сценарий (для поврежденного самолета), приведены в таблице 2.
В этом исследовании в случае потери вертикального стабилизатора предлагается использовать составляющую дифференциальной тяги динамики самолета в качестве альтернативного управляющего воздействия, заменяющего управление рулем направления, для восстановления устойчивости и управления поперечной/направленной динамикой полета. Далее представлены боковые линейные уравнения движения поврежденного самолета с элеронами , дифференциальной тягой и коллективной тягой в качестве управляющих воздействий [6] в виде
В этом случае, если начальный дифферентный угол бокового скольжения равен нулю, то не имеет никакого значения в эффективности управления при малом возмущении вокруг дифферентного условия [6], а значит, приведенные выше уравнения движения могут быть сведены к окончательной форме основных уравнений движения для поврежденного самолета как
2.
.jpg) 3. Условия полета
3. Условия полетаВ этом исследовании в качестве сценария полета был выбран крейсерский полет в установившемся режиме для Боинга 747-100 со скоростью 0,65 Маха (с соответствующей воздушной скоростью 673 фута/сек) на высоте 20 000 (футов). Предполагается, что в какой-то момент полета вертикальный стабилизатор полностью повреждается и самолет остается практически без вертикального стабилизатора.
Здесь мы хотели бы отметить, что этот метод также может быть расширен для охвата различных режимов работы (конвертов) и фактически также будет охватывать сценарий посадки. Некоторые ограничения, связанные с этим подходом, связаны с реакцией на несмоделированную динамику, которая в определенной степени была рассмотрена в разделе устойчивости. Этот подход направлен не только на то, чтобы охватить «полный» полетный диапазон, но и на то, чтобы продемонстрировать осуществимость такого подхода.
Ниже рассматриваются средства управления воздушным судном в таком крайнем случае. Для этого разрабатываются следующие штатные (неповрежденные) и поврежденные модели самолетов для анализа.
3. Динамика объекта
При заданных данных об условиях полета и информации, представленной в таблице 1, соответствующее представление в пространстве состояний для поперечной/направленной динамики номинального (неповрежденного) Боинга 747-100 получается как
На основании данных о производных поперечной/направленной устойчивости самолета без вертикального стабилизатора (приведенных в разделе 2.2) представление поврежденного самолета в поперечном/направленном направлении может быть получено как
Здесь определяется как матрица состояния номинального неповрежденного воздушного судна, тогда как представляет собой матрицу состояния поврежденного воздушного судна. Кроме того, представляет собой входную матрицу, в которой элероны и руль направления являются управляющими входами неповрежденного (номинального) самолета, тогда как обозначает входную матрицу сценария, в котором элероны и дифференциальная тяга являются управляющими входами поврежденного самолета. Также стоит отметить, что структура входной матрицы номинального самолета и поврежденного самолета остается достаточно похожей, за исключением терма. В равно , но равно в , что устраняет влияние дифференциальной тяги на угол бокового скольжения.
В равно , но равно в , что устраняет влияние дифференциальной тяги на угол бокового скольжения.
На этом этапе мы хотели бы подчеркнуть очень большое различие между существующими исследованиями в литературе (включая Степанян и др. [13]) и этой работой.
Замечание 1. Общеизвестный (хрестоматийный) факт, что статическая путевая устойчивость (в смысле бокового скольжения) самолета достигается за счет вертикального стабилизатора. Без вертикального стабилизатора статическая курсовая устойчивость самолета остается очень сложной. Это также очень четко показано в анализе производной аэродинамической устойчивости (представленном в разделе 2.2) и видно из сравнения и как представлено в (5) и (7) соответственно. Если внимательно соблюдать (7), то будет ясно, что в случае полной потери стабилизатора не будет абсолютно никакого соответствия между любым из входов и/или и углом бокового скольжения (), который не учитывается в существующие произведения в литературе. Это создает уникальную структуру входной матрицы-B и создает проблемы с точки зрения сингулярностей при проектировании системы управления. Таким образом, мы предлагаем следующую структуру динамики сильно поврежденного самолета, чтобы отразить реальный применимый сценарий.
Таким образом, мы предлагаем следующую структуру динамики сильно поврежденного самолета, чтобы отразить реальный применимый сценарий.
Допущение 2. На основании проведенного анализа аэродинамической устойчивости поврежденный самолет с полной потерей вертикального стабилизатора сохраняет управляющую (входную) структуру матрицы как предполагается, что он имеет ограниченные полномочия по управлению для представления сценария с поврежденным вертикальным стабилизатором.
В силу (9), предположения 2 и на основе геометрического анализа производных аэродинамической устойчивости поврежденного самолета, представленных в разделе 2.2, подчеркнем, что (при полностью поврежденном киле) существует отображение только по рыскание и крен динамика, но не обязательно динамика бокового скольжения. Таким образом, предположение 2 и анализ, проведенный в разделе 2.2, являются важными и решающими.
Далее, помимо структуры управляющей матрицы, здесь представлены характеристики демпфирования штатного и поврежденного самолетов. Они сведены в таблицы 3 и 4 для дальнейшего изучения.
Они сведены в таблицы 3 и 4 для дальнейшего изучения.
Таблица 3 показывает, что все три боковых/направленных режима номинального самолета стабильны из-за расположения полюсов левой полуплоскости (LHP), тогда как Таблица 4 ясно указывает на неустойчивый характер поврежденного самолета в режиме голландского крена справа расположение полюсов в полуплоскости (RHP). Кроме того, полюс спиральной моды находится в начале координат, что представляет собой очень медленную (также неустойчивую) динамику. Единственным устойчивым режимом поврежденного самолета является режим крена из-за расположения полюса левой полуплоскости (LHP). Расположение полюсов как номинального, так и поврежденного самолета также показано на рисунке 1.
При анализе динамики самолета без вертикального стабилизатора динамика движения будет играть жизненно важную роль в маневренности самолета и заслуживает тщательного исследования, которое более подробно исследуется в следующем разделе.
4. Динамика силовой установки
Общеизвестно, что с новыми достижениями в производственных процессах, конструкциях и материалах авиационные двигатели стали очень сложными системами и включают множество нелинейных процессов, которые влияют на общую производительность (и стабильность) самолета. С точки зрения баланса сил это обычно происходит из-за существующей связанной и сложной динамики между компонентами двигателя и их взаимосвязями при создании тяги. Однако для того, чтобы использовать дифференциальную тягу, создаваемую реактивными двигателями, в качестве управляющего сигнала для поперечной/курсовой устойчивости, необходимо смоделировать динамику двигателя, чтобы получить представление о характеристиках реакции двигателей.
С точки зрения баланса сил это обычно происходит из-за существующей связанной и сложной динамики между компонентами двигателя и их взаимосвязями при создании тяги. Однако для того, чтобы использовать дифференциальную тягу, создаваемую реактивными двигателями, в качестве управляющего сигнала для поперечной/курсовой устойчивости, необходимо смоделировать динамику двигателя, чтобы получить представление о характеристиках реакции двигателей.
Реакция двигателя, вообще говоря, зависит от его постоянной времени и характеристик временной задержки. Постоянная времени определяет, насколько быстро двигатель создает тягу, а временная задержка (которая обратно пропорциональна начальному уровню тяги) связана с запаздыванием в транспортировке жидкости двигателем и инерцией механических систем, таких как роторы и лопатки турбомашин. 6].
Также предполагается [6], что нелинейная динамическая модель двигателя может быть упрощена как линейная модель второго порядка с временной задержкой как
где и – коэффициент демпфирования и полоса пропускания динамики двигателя с замкнутым контуром соответственно; — коэффициент временной задержки, а — команда тяги, определяемая углом резольвера дроссельной заслонки двигателя.
Если постоянная времени определена как величина, обратная частоте полосы пропускания, и выбрана равной 1, представляющей критично затухающую реакцию двигателя (для сравнения с существующими исследованиями), динамика двигателя может быть представлена как
Для этого исследования был выбран двигатель Pratt and Whitney JT9D-7A для применения в примере Boeing 747-100, где сам двигатель развивает максимальную тягу 46 500 фунтов силы [24]. В условиях полета 0,65 Маха и 20 000 футов постоянная времени двигателя составляет 1,25 секунды, а временная задержка — 0,4 секунды [6].
Таким образом, кривая отклика двигателя на скорости 0,65 Маха и высоте 20 000 футов получается, как показано на рисунке 2, который дает полезное представление о том, как постоянная времени и факторы временной задержки влияют на создание тяги для реактивного двигателя JT9D-7A. . На скорости 0,65 Маха и высоте 20 000 футов, с постоянной времени двигателя 1,25 секунды и временной задержкой 0,4 секунды двигателю требуется примерно десять секунд, чтобы выйти на установившийся режим и развить максимальную мощность тяги в 46 500 фунтов силы при дифферентной тяге 3221 фунт-сила. Увеличение генерируемой тяги происходит относительно линейно, при этом характеристика отклика двигателя составляет примерно 12 726 фунт-сил/с в течение первых двух секунд, а затем кривая тяги становится нелинейной, пока не достигает устойчивого состояния при максимальной мощности тяги примерно через десять секунд. Это представляет собой одно из основных различий между рулем направления и дифференциальной тягой как управляющим входом. Из-за отставания в транспорте жидкости двигателя и инерции турбомашин дифференциальная тяга (как управляющий вход) не может реагировать так же мгновенно, как руль направления, что необходимо очень серьезно учитывать при проектировании системы управления.
Увеличение генерируемой тяги происходит относительно линейно, при этом характеристика отклика двигателя составляет примерно 12 726 фунт-сил/с в течение первых двух секунд, а затем кривая тяги становится нелинейной, пока не достигает устойчивого состояния при максимальной мощности тяги примерно через десять секунд. Это представляет собой одно из основных различий между рулем направления и дифференциальной тягой как управляющим входом. Из-за отставания в транспорте жидкости двигателя и инерции турбомашин дифференциальная тяга (как управляющий вход) не может реагировать так же мгновенно, как руль направления, что необходимо очень серьезно учитывать при проектировании системы управления.
5. Дифференциальная тяга как механизм управления
5.1. Динамика и конфигурация тяги
Чтобы использовать дифференциальную тягу в качестве управляющего сигнала для обычного четырехмоторного самолета (который можно было бы очень легко адаптировать к двухдвигательному), был разработан модуль управления дифференциальной тягой, обеспечивающий отображение между динамика руля и соответствующие значения тяги. Поскольку это хорошо известная концепция (типа учебника), входная дифференциальная тяга в целом определяется как чистая — создаваемая тяга. В этом сценарии она определяется как чистая тяга в результате динамики двигателя № 1 и двигателя № 4, в то время как величины тяги, создаваемой остальными двигателями, поддерживаются равными и фиксируются, как показано в (12), чтобы сбалансировать соответствующий крутящий момент/ моментные значения. Эта концепция более подробно проиллюстрирована на рис. 3.
Поскольку это хорошо известная концепция (типа учебника), входная дифференциальная тяга в целом определяется как чистая — создаваемая тяга. В этом сценарии она определяется как чистая тяга в результате динамики двигателя № 1 и двигателя № 4, в то время как величины тяги, создаваемой остальными двигателями, поддерживаются равными и фиксируются, как показано в (12), чтобы сбалансировать соответствующий крутящий момент/ моментные значения. Эта концепция более подробно проиллюстрирована на рис. 3.
Двигатели с номерами 1 и 4 используются для создания дифференциальной тяги благодаря более длинному плечу момента , что делает дифференциальную тягу более эффективной в качестве контроля момента рыскания. Это наводит на мысль о необходимости разработки логики, которая сопоставляет входной сигнал руля направления с входным сигналом дифференциальной тяги, что более подробно объясняется в следующем разделе.
5.2. Логика преобразования ввода руля направления в дифференциальную тягу
Когда вертикальный стабилизатор самолета не поврежден (т. е. с номинальной динамикой объекта), элероны и руль направления остаются основными механизмами ввода управления. Однако при повреждении вертикального стабилизатора на управляющее усилие от руля направления не будет реагировать. Чтобы устранить эту неудачу, но по-прежнему иметь возможность использовать руль направления, в логику управления вводится модуль управления дифференциальной тягой, как показано на рисунках 4 и 5 соответственно. Этот модуль управления дифференциальной тягой отвечает за преобразование соответствующей входной/выходной динамики от педалей руля направления в реакцию самолета, так что, когда руль направления (и весь вертикальный стабилизатор) полностью потерян, вход руля все еще будет использоваться, но переключен/преобразован на вход дифференциальной тяги, который действует как вход руля направления для поперечного/направленного управления. Эта логика составляет один из новых подходов, представленных в этой статье.
е. с номинальной динамикой объекта), элероны и руль направления остаются основными механизмами ввода управления. Однако при повреждении вертикального стабилизатора на управляющее усилие от руля направления не будет реагировать. Чтобы устранить эту неудачу, но по-прежнему иметь возможность использовать руль направления, в логику управления вводится модуль управления дифференциальной тягой, как показано на рисунках 4 и 5 соответственно. Этот модуль управления дифференциальной тягой отвечает за преобразование соответствующей входной/выходной динамики от педалей руля направления в реакцию самолета, так что, когда руль направления (и весь вертикальный стабилизатор) полностью потерян, вход руля все еще будет использоваться, но переключен/преобразован на вход дифференциальной тяги, который действует как вход руля направления для поперечного/направленного управления. Эта логика составляет один из новых подходов, представленных в этой статье.
Как видно из рисунков 4 и 5, функция модуля управления дифференциальной тягой заключается в преобразовании входного сигнала руля направления (педали) в входной сигнал дифференциальной тяги. Чтобы достичь этого, вход руля направления (педали) (в радианах) сопоставляется с входом дифференциальной тяги (в фунт-силах), который затем передается в динамику двигателя, как обсуждалось ранее в разделе 4. С этой модификацией динамика двигателя будет определять, как создается дифференциальная тяга, которая затем предоставляется как «виртуальный руль направления» в динамике самолета. Преобразование радиана в фунт-силу, даже если это простая информация из учебника, получено и представлено в следующем разделе для полноты картины.
Чтобы достичь этого, вход руля направления (педали) (в радианах) сопоставляется с входом дифференциальной тяги (в фунт-силах), который затем передается в динамику двигателя, как обсуждалось ранее в разделе 4. С этой модификацией динамика двигателя будет определять, как создается дифференциальная тяга, которая затем предоставляется как «виртуальный руль направления» в динамике самолета. Преобразование радиана в фунт-силу, даже если это простая информация из учебника, получено и представлено в следующем разделе для полноты картины.
5.3. Коэффициент преобразования радиан в фунт-силу
Используя рис. 3 и допущение об установившемся горизонтальном полете, можно получить следующее соотношение: это означает, что момент рыскания при отклонении руля направления и при использовании дифференциальной тяги должен быть одинаковым. Таким образом, соотношение между входным сигналом управления дифференциальной тягой и входным сигналом управления рулем направления может быть получено как
На основе условий полета на скорости 0,65 Маха и высоте 20 000 футов и данных для Boeing 747-100, приведенных в таблице 1, коэффициент преобразования для входного сигнала управления рулем направления в входной сигнал дифференциальной тяги рассчитывается следующим образом:
Из-за условного обозначения отклонения руля направления и диаграммы свободного тела на рис. 3 здесь отрицательное значение. Следовательно, для Боинга 747-100 в этом исследовании коэффициент преобразования для преобразования входного сигнала руля направления в входной сигнал дифференциальной тяги равен
3 здесь отрицательное значение. Следовательно, для Боинга 747-100 в этом исследовании коэффициент преобразования для преобразования входного сигнала руля направления в входной сигнал дифференциальной тяги равен
5.4. Заданная и доступная дифференциальная тяга
В отличие от руля направления, из-за задержки динамики двигателя с постоянной времени существует большая разница в управляемой дифференциальной тяге и доступной дифференциальной тяге, как показано на рис. 6.9.0003
Из рисунка 6 видно, что по сравнению с управляемой дифференциальной тягой доступная дифференциальная тяга равна по величине, но больше по времени подачи. Для шага на один градус на руле направления соответствующая эквивалентная управляемая и доступная дифференциальная тяга составляют 7737 фунт-сил, что достигается за десять секунд. В отличие от мгновенного управления входом руля, существует запаздывание, связанное с использованием дифференциальной тяги в качестве управляющего сигнала. Это связано с запаздыванием транспортировки моторной жидкости и инерционностью механических систем, таких как несущие винты и лопатки турбомашин [6]. Это важное соображение при проектировании, и оно будет учтено на этапе проектирования адаптивной системы управления в следующих разделах.
Это важное соображение при проектировании, и оно будет учтено на этапе проектирования адаптивной системы управления в следующих разделах.
6. Анализ отклика разомкнутой системы
Вслед за этим на Рисунке 7 представлены характеристики отклика разомкнутой системы динамики самолета с поврежденным вертикальным стабилизатором на шаг в один градус от элеронов и дифференциальной тяги. Хорошо видно, что при сильном повреждении самолета и потере вертикального оперения реакция самолета на подаваемые воздействия совершенно нестабильна во всех четырех состояниях (что было видно и по расположению полюсов). Это означает, что у органа управления (или пилота) не будет возможности вовремя стабилизировать самолет, что требует нового подхода к спасению поврежденного самолета. Это еще один пункт, где представлен второй новый вклад статьи: стратегия автоматического управления для стабилизации самолета, которая позволяет безопасно (т. Е. Целиком) приземлиться самолету.
7. Проект линейно-квадратичного регулятора для модели динамики растений
7.
 1. Базовая теория
1. Базовая теорияКак хорошо известно из литературы, оптимальное управление нацелено на получение наилучших (оптимальных) результатов в рамках заданного набора ограничений. Оптимальный контроллер обычно предназначен для минимизации индекса производительности (PI), который обычно определяется как окончательный набор всех ценных показателей, представляющих интерес для проектировщика. В этой связи здесь мы представляем методологию получения параметров регулятора на основе линейно-квадратичного регулятора (LQR-) для динамики модельного объекта, который будет использоваться в теории адаптивного управления.
Взято из [25], рассмотрим следующую задачу оптимального регулятора.
Учитывая уравнение системы
определяем матрицу усиления вектора оптимального управления:
чтобы минимизировать индекс производительности (PI):
где Q и R — вещественные симметричные положительно определенные матрицы. Стоит отметить, что (19) представляет собой индекс производительности, в котором представлены переходные затраты энергии и представляют собой затраты энергии управления.
7.2. Стабилизация поврежденного самолета с помощью контроллера LQR
В этом разделе мы продемонстрируем методологию получения замкнутой динамики стабильной модели объекта для поврежденного самолета. После итеративного процесса матрица взвешивания состояния Q и матрица стоимости управления R выбираются как где матрица обратной связи тогда получается как
Матрица объекта модели становится
Затем предоставляется отклик замкнутого контура полученного эталонного объекта модели .
По сравнению с неустойчивой реакцией поврежденного самолета без обратной связи на рисунке 7 в разделе 6, реакция с обратной связью стабильна (как показано на рисунке 8) во всех четырех состояниях в полученном эталонный завод модели : угол крена (), скорость крена (), угол бокового скольжения () и скорость рыскания (). Кроме того, управляющие усилия для элеронов и дифференциальной тяги также достижимы и находятся в пределах пределов насыщения исполнительного механизма и границ ограничителя скорости. Из рисунка 9 мы также можем видеть, что усилие управления элеронами требует максимального отклонения в 1 градус и устанавливается на уровне около -0,7 градуса, в то время как усилие управления дифференциальной тягой требует максимум -400 фунтов силы (отрицательное значение дифференциальной тяги) и устанавливается примерно на уровне 100 фунтов силы. , что вполне соответствует возможностям тяги JT9.Двигатель Д-7А.
Из рисунка 9 мы также можем видеть, что усилие управления элеронами требует максимального отклонения в 1 градус и устанавливается на уровне около -0,7 градуса, в то время как усилие управления дифференциальной тягой требует максимум -400 фунтов силы (отрицательное значение дифференциальной тяги) и устанавливается примерно на уровне 100 фунтов силы. , что вполне соответствует возможностям тяги JT9.Двигатель Д-7А.
8. Контроллер эталонной адаптивной системы (MRAS) на основе модели Ляпунова
Управление самолетом с полностью поврежденным вертикальным стабилизатором и без возможности управления рулем направления может стать очень напряженной и трудоемкой (если не фатальной) задачей для пилотов. Эта задача также требует навыков и опыта, которыми трудно обладать и применять в чрезвычайно напряженные моменты. В таких случаях у пилотов обычно есть секунды, чтобы среагировать, и, как было замечено заранее, связь между пилотом и нестабильной динамикой самолета обычно приводила к катастрофе. Поэтому для безопасности всего полета крайне важно, чтобы онлайн и адаптивная система автоматического управления , которая будет разработана, испытана и внедрена для самолета для смягчения последствий аварий и повышения безопасности, стабильности и надежности. В качестве ответа на такую потребность здесь мы представляем новую адаптивную систему управления, основанную на устойчивости по Ляпунову.
Поэтому для безопасности всего полета крайне важно, чтобы онлайн и адаптивная система автоматического управления , которая будет разработана, испытана и внедрена для самолета для смягчения последствий аварий и повышения безопасности, стабильности и надежности. В качестве ответа на такую потребность здесь мы представляем новую адаптивную систему управления, основанную на устойчивости по Ляпунову.
В традиционной эталонной модели теории адаптивного управления есть два знаменитых и широко используемых метода — правило MIT и подход устойчивости Ляпунова [26]. Из-за многовходной-многовыходной (MIMO) структуры латеральной/направленной динамики правило MIT будет оставлено в покое из-за его относительно слабых характеристик управляемости в более высоких порядках и сложных системах [26]. Вместо этого будет использоваться мощный характер конструкции контроллера эталонной адаптивной системы (MRAS) на основе Ляпунова.
8.1. Характеристики устойчивости
Теорема 1. Для заданной динамики системы поврежденной модели самолета в (7) и (8) существует функция Ляпунова в виде
что гарантирует асимптотическую устойчивость тогда и только тогда, когда закон регулирования с обратной связью определяется как
Для заданной динамики системы поврежденной модели самолета в (7) и (8) существует функция Ляпунова в виде
что гарантирует асимптотическую устойчивость тогда и только тогда, когда закон регулирования с обратной связью определяется как
Доказательство 1. Рассмотрим предложенную функцию Ляпунова, взятую из [27]:
Здесь определяется как динамика ошибки между выходом и моделью, а определяется как матрица решения Ляпунова, матрица весов, матрица корректировки и матрица вторичных весов соответственно.
Для заданной динамики поврежденного самолета желательно, чтобы самолет сохранял управляющую (входную) матричную структуру, определенную в предположении 2, что приводит к , поэтому в (25), . Следовательно,
Здесь — весовой коэффициент, а — «след» выражения. Кроме того, давайте рассмотрим , как описано далее в разделе 7.2. Очевидно, что , , и непрерывно дифференцируемы. Для данной системы динамика ошибок () принимает вид
С заданным управляющим усилием,
куда . После некоторой алгебры получаем
После некоторой алгебры получаем
Опять же, для заданной динамики поврежденного самолета желательно, чтобы самолет сохранял ограниченную управляющую (входную) матричную структуру, как определено в предположении 2, что приводит к . Таким образом,
С где постоянный коэффициент усиления обратной связи и представляет неопределенность настройки параметра, а ,
Следовательно,
Производная функции Ляпунова из (23) может быть получена как где , с положительно определенной матрицей, выбранной равной грамиану наблюдаемости, . Отсюда видно, что отрицательно определенность функции Ляпунова (), а значит, и асимптотическая устойчивость общей динамики системы гарантируется при удовлетворен. Это приводит к окончательному закону адаптации: что гарантирует асимптотическую устойчивость ■.
8.2. Результаты моделирования
Репрезентативная архитектура блок-схемы предлагаемой конструкции адаптивной системы управления (основанной на подходе устойчивости по Ляпунову) показана на рисунке 10. Конечная цель предлагаемой конструкции адаптивной системы управления состоит в том, чтобы исследовать, может ли Стабилизатор сможет имитировать динамику модели самолета и отслеживать реакцию модели самолета или нет, используя дифференциальную тягу в качестве управляющего входа для поперечной / направленной динамики. Управляющие входы для обеих установок представляют собой шаговые входы с шагом в один градус как для элеронов, так и для дифференциальной тяги. Стоит отметить, что это экстремальный тест сценария, чтобы увидеть, может ли поврежденный самолет, использующий дифференциальную тягу, удерживать себя в непрерывном маневре рыскания и крена, не теряя устойчивости и не теряя управления.
Конечная цель предлагаемой конструкции адаптивной системы управления состоит в том, чтобы исследовать, может ли Стабилизатор сможет имитировать динамику модели самолета и отслеживать реакцию модели самолета или нет, используя дифференциальную тягу в качестве управляющего входа для поперечной / направленной динамики. Управляющие входы для обеих установок представляют собой шаговые входы с шагом в один градус как для элеронов, так и для дифференциальной тяги. Стоит отметить, что это экстремальный тест сценария, чтобы увидеть, может ли поврежденный самолет, использующий дифференциальную тягу, удерживать себя в непрерывном маневре рыскания и крена, не теряя устойчивости и не теряя управления.
Как также видно из рисунка 10, как для модели, так и для поврежденного самолета входные сигналы для элеронов и руля направления отображаются через входной модуль управления, где входной сигнал руля направляется через модуль управления дифференциальной тягой а затем преобразуется во входную дифференциальную тягу в соответствии с логикой преобразования, описанной в разделе 5 этой статьи.
Чтобы иметь осуществимую стратегию управления в реальной ситуации, ограничивающие факторы (такие как пределы насыщения и ограничители скорости ) накладываются на усилия управления элеронами и дифференциальной тягой. Отклонение элеронов ограничено ±26 градусов [28]. Для дифференциальной тяги насыщение дифференциальной тяги установлено на уровне 43 729 фунт-сил, что является разностью значений максимальной тяги и уравновешенной тяги двигателя JT9D-7A. Кроме того, ограничитель скорости также накладывается на характеристику отклика тяги на уровне 12 726 фунт-сил/с, как обсуждалось в разделе 4.
После этого результаты моделирования модели адаптивной системы управления представлены на рисунке 11. Как показано на рисунке 11, всего через 15 секунд все четыре состояния поперечной/направленной динамики самолета достигают установившихся значений. Также хорошо видно, что после временного интервала в 15 секунд завод поврежденного самолета может имитировать завод модели самолета, где ошибки сведены к минимуму, как показано на рисунке 12. Это демонстрирует функциональность конструкции адаптивной системы управления на основе Ляпунова в такой экстремальный сценарий.
Это демонстрирует функциональность конструкции адаптивной системы управления на основе Ляпунова в такой экстремальный сценарий.
Из рисунка 12 видно, что сигналы ошибок для всех четырех боковых/направленных состояний уменьшаются через 15 секунд. Однако это происходит за счет немного более высоких требований к усилию управления, как показано на рисунке 13, которые все еще находятся в пределах регулирования и без какого-либо насыщения исполнительных механизмов.
Усилие управления элеронами, как показано на рис. 13, требует максимального отклонения около -2 градусов и достигает установившегося состояния при отклонении приблизительно -0,7 градуса через 15 секунд в ответ на вход шага в один градус. Это усилие управления элеронами очень разумно и достижимо, если предположить, что элероны имеют мгновенные характеристики отклика, пренебрегая запаздыванием от приводов или гидравлических систем. Усилие управления дифференциальной тягой требует максимальной дифференциальной тяги -3000 фунтов силы (отрицательная дифференциальная тяга означает), что находится в пределах возможностей тяги JT9. двигатель Д-7А, а усилие управления дифференциальной тягой достигает установившегося состояния около 85 фунтов силы через 15 секунд. Таким образом, можно сделать вывод, что конструкция адаптивной системы управления с использованием дифференциальной тяги в качестве входного сигнала управления спасает поврежденный самолет, заставляя его вести себя как модель самолета, но осуществимость метода адаптивного управления в значительной степени зависит от Характеристики тяги реактивных двигателей самолетов.
двигатель Д-7А, а усилие управления дифференциальной тягой достигает установившегося состояния около 85 фунтов силы через 15 секунд. Таким образом, можно сделать вывод, что конструкция адаптивной системы управления с использованием дифференциальной тяги в качестве входного сигнала управления спасает поврежденный самолет, заставляя его вести себя как модель самолета, но осуществимость метода адаптивного управления в значительной степени зависит от Характеристики тяги реактивных двигателей самолетов.
9. Анализ устойчивости проекта адаптивной системы управления
Надежность конструкции адаптивной системы, представленной в этой статье, исследуется путем введения 30% полного блока, аддитивной неопределенности в динамику объекта поврежденного самолета, чтобы проверить его способность отслеживать эталонную реакцию модели самолета в наличие неопределенности. На рис. 14 показана логика проектирования адаптивной системы управления в условиях неопределенности.
Была проведена тысяча симуляций методом Монте-Карло для проверки устойчивости поврежденного объекта в условиях неопределенности. Реакции состояния при наличии неопределенности 30% показаны на рисунке 15. Очевидно, что конструкция адаптивной системы управления способна хорошо работать в данных неопределенных условиях, и поврежденный самолет может следовать/имитировать реакцию модели самолета только после примерно 15 секунд. В этом смысле неопределенная динамика установки находится в ожидаемых пределах.
Реакции состояния при наличии неопределенности 30% показаны на рисунке 15. Очевидно, что конструкция адаптивной системы управления способна хорошо работать в данных неопределенных условиях, и поврежденный самолет может следовать/имитировать реакцию модели самолета только после примерно 15 секунд. В этом смысле неопределенная динамика установки находится в ожидаемых пределах.
Надежность конструкции адаптивной системы управления можно дополнительно проиллюстрировать на рисунке 16, где все сигналы ошибок достигают устойчивого состояния и сходятся к нулю только через 15 секунд. Однако эти благоприятные характеристики достигаются за счет управляющего усилия от элеронов и дифференциальной тяги, как показано на рисунке 17.
Согласно рисунку 17, когда имеется 30% полного блока, аддитивная неопределенность, управление элеронами требует максимального отклонения примерно на -1 градус и достигает устойчивого состояния при температуре от -0,4 до -0,3 градуса через 15 секунд. Требования к усилию управления элеронами разумны и выполнимы из-за ограничивающего фактора ±26 градусов отклонения элеронов [28] и предположения, что элероны имеют мгновенные характеристики отклика, пренебрегая запаздыванием от приводов или гидравлических систем.
Что касается дифференциальной тяги, то при 30-процентной неопределенности управление дифференциальной тягой требует максимального значения приблизительно −3400 lbf (отрицательная дифференциальная тяга означает ), что находится в пределах тяговой способности двигателя JT9D-7A, а управление дифференциальной тягой усилие достигает устойчивого состояния в диапазоне от -350 до 450 фунтов силы через 15 секунд. Опять же, из-за насыщения дифференциальной тяги, установленного на 43 729 фунтов силы, и ограничителя отклика тяги, установленного на 12 726 фунтов силы/с, это управляющее усилие дифференциальной тяги при наличии неопределенности достижимо в реальной ситуации.
10. Заключение
В этом документе изучалось использование дифференциальной тяги в качестве управляющего воздействия, чтобы помочь самолету Боинг 747-100 с поврежденным вертикальным стабилизатором восстановить свою боковую/курсовую устойчивость.
На протяжении всей этой статьи были построены необходимые номинальные и поврежденные модели самолетов, в которых уравнения бокового/направленного движения были пересмотрены, чтобы включить дифференциальную тягу в качестве управляющего сигнала для поврежденного самолета. Затем исследуется динамика объекта как штатного (неповрежденного) самолета, так и поврежденного самолета, и выводится специальный случай производной аэродинамической устойчивости (из-за сильно поврежденной геометрии самолета). Динамика двигателя реактивного самолета моделировалась как система дифференциальных уравнений с постоянной времени двигателя и условиями временной задержки для изучения времени отклика двигателя по отношению к заданной тяге. Затем был представлен новый модуль управления дифференциальной тягой для сопоставления входного сигнала руля направления с входным сигналом дифференциальной тяги. Контроллер линейно-квадратичного регулятора был разработан для обеспечения стабилизированной модели динамики поврежденного самолета. Способность поврежденного самолета отслеживать и имитировать поведение модели самолета в экстремальном сценарии была проиллюстрирована с помощью конструкции адаптивной системы управления, основанной на теории устойчивости Ляпунова. Продемонстрированные результаты показали, что неустойчивая динамика поврежденного объекта без обратной связи может быть стабилизирована с использованием методологии дифференциальной тяги на основе адаптивного управления.
Затем исследуется динамика объекта как штатного (неповрежденного) самолета, так и поврежденного самолета, и выводится специальный случай производной аэродинамической устойчивости (из-за сильно поврежденной геометрии самолета). Динамика двигателя реактивного самолета моделировалась как система дифференциальных уравнений с постоянной времени двигателя и условиями временной задержки для изучения времени отклика двигателя по отношению к заданной тяге. Затем был представлен новый модуль управления дифференциальной тягой для сопоставления входного сигнала руля направления с входным сигналом дифференциальной тяги. Контроллер линейно-квадратичного регулятора был разработан для обеспечения стабилизированной модели динамики поврежденного самолета. Способность поврежденного самолета отслеживать и имитировать поведение модели самолета в экстремальном сценарии была проиллюстрирована с помощью конструкции адаптивной системы управления, основанной на теории устойчивости Ляпунова. Продемонстрированные результаты показали, что неустойчивая динамика поврежденного объекта без обратной связи может быть стабилизирована с использованием методологии дифференциальной тяги на основе адаптивного управления. Дальнейший анализ устойчивости показал, что неопределенная динамика объекта может следовать динамике модели объекта с асимптотической устойчивостью при наличии 30% полного блока, аддитивной неопределенности, связанной с динамикой поврежденного самолета.
Дальнейший анализ устойчивости показал, что неопределенная динамика объекта может следовать динамике модели объекта с асимптотической устойчивостью при наличии 30% полного блока, аддитивной неопределенности, связанной с динамикой поврежденного самолета.
В целом, эта структура обеспечивает методологию автоматического управления для спасения сильно поврежденного самолета и предотвращения опасного столкновения самолета и пилотов, которое привело к авариям в большом количестве инцидентов с коммерческими авиалиниями. Кроме того, был также сделан вывод о том, что из-за сильной зависимости генерирования дифференциальной тяги от реакции двигателя, чтобы лучше использовать дифференциальную тягу в качестве эффективного управляющего воздействия в сценарии спасения жизни, основные изменения в характеристиках реакции двигателя также хотел бы лучше помочь такому алгоритму.
Nomenclature
| : | Aircraft | |
| : | State matrix | |
| : | Input matrix | |
| : | Aircraft wingspan | |
| : | Output matrix | |
| : | Безразмерная производная момента качения | |
| : | Безразмерная производная момента рыскания | |
| : | Dimensionless derivative of side force | |
| : | State transition matrix | |
| : | Change in side wash angle with respect to change in side-slip angle | |
| : | Gravitational acceleration | |
| : | Нормированный момент инерции массы относительно оси x | |
| : | Нормированный продукт инерции относительно оси xz | |
| : | Normalized mass moment of inertia about the z -axis | |
| : | Dimensional derivative of rolling moment | |
| : | Vertical stabilizer lift force | |
| : | Distance от аэродинамического центра вертикального стабилизатора до центра тяжести самолета | |
| : | Модель эталонной адаптивной системы | |
| : | Aircraft mass | |
| : | Dimensional derivative of yawing moment | |
| : | Roll rate | |
| : | Yaw rate | |
| : | Aircraft wing area | |
| : | Площадь вертикального оперения | |
| : | Тяга двигателя | |
| : | Команда управления тягой двигателя | |
| : | Время | 0255 |
| : | Time delay | |
| : | Vertical stabilizer volume ratio | |
| : | Airspeed | |
| : | Aircraft weight | |
| : | Dimensional derivative of side force | |
| : | Расстояние от крайнего двигателя до центра тяжести самолета | |
| : | Расстояние от центра давления вертикального стабилизатора до осевой линии фюзеляжа | |
| : | Angle of attack | |
| : | Side-slip angle | |
| : | Flight path angle | |
| : | Aileron deflection | |
| : | Rudder deflection | |
| : | Общая тяга | |
| : | Дифференциальная тяга | |
| : | Коэффициент демпфирования 9025 | Efficiency factor |
| : | Pitch angle | |
| : | Air density | |
| : | Time constant | |
| : | Roll angle | |
| : | Bandwidth frequency | |
| : | Производная по времени первого порядка | |
| : | Производная по времени второго порядка | |
| : | Усеченное значение | |
| : | Поврежденный компонент самолета | |
| : | Деталь модели самолета | |
| : | Номинальный компонент |
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Благодарности
Авторы хотели бы поблагодарить доктора Ping Hsu с факультета электротехники и доктора Fei Sun из лаборатории систем управления полетом (FCS) и БПЛА Государственного университета Сан-Хосе за плодотворные обсуждения и ценные отзывы.
Copyright © 2018 Лонг К. Лу и Камран Туркоглу. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
[PDF] Контроль поперечной устойчивости электромобилей с приводом от двигателя на колесах на основе оценки угла бокового увода с использованием датчиков поперечной силы в шинах
- 5
@article{Nam2012LateralSC,
title={Управление поперечной устойчивостью электромобилей с приводом от двигателя на колесах на основе оценки угла бокового скольжения с использованием датчиков поперечного усилия на шинах},
автор = {Канхён Нам, Хироши Фудзимото и Ёити Хори},
journal={Транзакции IEEE по автомобильным технологиям},
год = {2012},
объем = {61},
страницы={1972-1985}
} - K.
 Nam, H. Fujimoto, Y. Hori
Nam, H. Fujimoto, Y. Hori - Опубликовано 21 марта 2012 г.
- Engineering
- IEEE Transactions on Vehicular Technology
В этом документе представлен метод использования датчиков бокового усилия на шинах для оценки угла бокового скольжения транспортного средства и повышения устойчивости электромобилей с приводом от колес (IWM-EV). [] Ключевой метод Для оценки угла бокового скольжения транспортного средства. , предлагается наблюдатель состояния, полученный с помощью метода расширенной фильтрации Калмана (EKF), и оценивается посредством полевых испытаний на экспериментальном IWM-EV Экспериментальные результаты показывают способность предложенного наблюдателя обеспечивать точную оценку. …
Взгляд на IEEE
hflab.k.u-tokyo.ac.jpНадежный метод контроля поперечной устойчивости электромобиля с приводом от колеса на основе наблюдателя угла бокового скольжения
- Yaxiong Wang, Feng Kang, Taipeng Wang, Hongbin Ren
Машиностроение
- 2018
Численное моделирование проводится в среде комоделирования Matlab/Simulink-Carsim для демонстрации эффективности разработанного алгоритма робастного управления для контроля поперечной устойчивости колесного механического транспортного средства.
Оценка угла бокового увода электромобилей с приводом на колеса с помощью каскадных мультикалмановских фильтров и модифицированной модели шин
- Лонг Чен, Те Чен, Син Сюй, Инфэн Цай, Хао-бин Цзян, Сяоцян Сунь
Инженерия
- 2019
Надежная оценка продольной силы и угла бокового скольжения необходима для обеспечения устойчивости автомобиля и обеспечения активной безопасности. В этой статье представлена новая оценка продольной силы и угла бокового скольжения…
Оценка продольной силы и угла бокового скольжения для интеллектуальных четырехколесных электромобилей с независимым приводом с помощью итерации наблюдателя и объединения информации
Датчики
Предлагается стратегия оценки, основанная на итерации наблюдателя и слиянии информации, в которой наблюдатель Люенбергера применяется для достижения трансцендентной оценки с использованием меньшего количества измерений датчика, а расширенный фильтр Калмана используется для апостериорной оценки. оценка с большей точностью.
оценка с большей точностью.
Оценка продольной силы, поперечной скорости транспортного средства и скорости рыскания для четырехколесных электромобилей с независимым приводом
- Те Чен, Син Сюй, Лонг Чен, Хао-бин Цзян, Инфэн Цай, Юн Ли
Инженерное дело
- 2018
Усовершенствованное управление движением электромобилей на основе надежного управления боковой силой в шинах с помощью активного переднего рулевого управления
В этом документе представлен новый метод управления движением, основанный на надежном контроле поперечной силы в шинах (LTFC), для повышения устойчивости или маневренности автомобиля. При прохождении поворотов движение автомобиля полностью регулируется…
Контроль угла бокового скольжения на основе наблюдателя возмущений для улучшения характеристик прохождения поворотов электромобилей с электроприводом в колесах мотор-электромобили и проверены с помощью компьютерного моделирования.
Оценка угла бокового скольжения автомобиля и сцепления с дорогой с использованием онлайн-алгоритма градиентного спуска
Метод позволяет надежно и точно оценить угол бокового скольжения автомобиля и сцепление с дорогой в различных условиях испытаний и может эффективно подавлять влияние шума датчика, изменения продольной скорости , и нелинейность усилия шины на результаты оценки.
Оценка жесткости на поворотах и угла бокового скольжения на основе упрощенных моделей поперечной динамики для полноприводных электромобилей с информацией о поперечном усилии на шину
- Юфэн Лянь, Ю. Чжао, Лейлей Ху, Янь-тао Тянь
Engineering
- 2015
В данной статье предлагаются упрощенные модели поперечной динамики передних и задних шин с информацией о боковом усилии на шину. Регрессионные модели рекурсивного метода наименьших квадратов (RLS) с…
Метод комплексной оценки угла бокового скольжения автономного электромобиля на основе надежного кубатурного фильтра Калмана с избыточной информацией об измерениях World Electric Vehicle Journal
Предложен метод оценки слияния угла бокового скольжения, основанный на робастном кубатурном фильтре Калмана и зависимости скорости вращения колеса, и эффективность предложенного метода оценки подтверждена соответствующими результатами сравнительного анализа.
Разработка стратегии оценки состояния транспортного средства на основе слияния с использованием фильтров Калмана и метода компенсации нагрузки на шину
- Те Чен, Инфэн Цай, Лонг Чен, Син Сюй, Хао-бин Цзян, Сяоцян Сунь
Инженерия
03 Доступ 9003 IEEE
- 2019
Разработана общая стратегия оценки с объединением информации и компенсацией силы на шинах, в которой взвешенный кубатурный фильтр Калмана с квадратным корнем с адаптивной ковариационной матрицей шума измерения разработан для конструкции наблюдателя.
ПОКАЗАНЫ 1–10 ИЗ 37 ССЫЛОК
СОРТИРОВАТЬ ПОРелевантности Наиболее влиятельные документыНедавность
Оценка бокового скольжения и углов крена электромобилей с использованием датчиков поперечной силы в шинах с использованием методов RLS и фильтра Калмана
Новые методы оценки реального угла и угла крена с использованием боковых сторон Предложены измерения поперечной силы на шинах во времени, полученные от мультисенсорных ступичных узлов, для практического применения в системах управления электромобилями с приводом от колес.
Повышение устойчивости полноприводного гибридного электромобиля с использованием управления задним двигателем
Предложен алгоритм управления на основе нечетких правил, который генерирует прямой момент рыскания для компенсации ошибок угла бокового скольжения и скорости рыскания, который обнаружил, что приводное и рекуперативное торможение на заднем двигателе может обеспечить повышенную устойчивость.
Прямое управление моментом рыскания электромобиля с приводом от колес на основе нечеткого наблюдателя угла скольжения кузова
- Cong Geng, L. Mostefai, M. Denai, Y. Hori
Инженерия, информатика
IEEE Transactions on Industrial Electronics
- 2009
Алгоритм управления на основе наблюдателя для стабилизации колеса -предложено моторное транспортное средство, которое создает прямой момент рыскания для компенсации отклонений состояния и было продемонстрировано в моделировании и в экспериментальных условиях в реальном времени.
A Контроль устойчивости за счет активного управления углом наклона переднего колеса в системе автомобиля
Разработан новый линейный наблюдатель, который может сделать расчетную ошибку малой по сравнению с обычным линейным наблюдателем, и построена скорость рыскания, следующая за контроллером, для реализации этой системы управления в реальной системе транспортного средства.
Бортовая оценка в режиме реального времени боковых сил транспортного средства на дорогу и угла бокового скольжения
Главной задачей безопасности вождения стандартных транспортных средств или киберавтомобилей является понимание и предотвращение опасных ситуаций. Тщательное изучение данных об авариях показывает, что потеря контроля над…
Оценка состояния транспортного средства для усовершенствованного управления движением транспортного средства с использованием новых датчиков поперечной силы на шинах
В этой статье представлены новые методы в реальном времени для оценки поперечной скорости транспортного средства и угла крена. Боковые силы в шинах, полученные от блока мультисенсорной ступицы (MSHub), используются для…
Боковые силы в шинах, полученные от блока мультисенсорной ступицы (MSHub), используются для…
Метод управления движением транспортного средства с использованием наблюдателя момента рыскания и наблюдателя поперечной силы для электромобиля
- Y. Yamauchi, H. Fujimoto
Машиностроение
- 2010
В последнее время электромобили (EV) привлекают внимание, поскольку они представляют собой многообещающее решение энергетических и экологических проблем. Кроме того, электромобили имеют потенциальное применение в управлении…
Адаптивное управление движением транспортного средства в поперечной плоскости с использованием оптимальных сил трения в шинах с учетом пределов насыщения
Устойчивость и сходимость ошибок интегрированной системы управления при наличии неопределенных параметров, т. Очень важное свойство средств активной безопасности обеспечивается использованием функции Ляпунова.
Управление движением в электромобиле с четырьмя независимыми мотор-колесами
- Сакаи С.
 , Садо Х., Хори Ю.
, Садо Х., Хори Ю. Машиностроение
- 1999
автомобиль (EV) с четырьмя независимыми приводными двигателями в колесах. Во-первых, мы предлагаем и моделируем новый надежный динамический контроль момента рыскания (DYC). DYC is…
Разработка и экспериментальная оценка устройства оценки угла скольжения для контроля устойчивости транспортного средства
Разработан алгоритм в режиме реального времени для оценки угла увода с использованием недорогих датчиков, обычно доступных для приложений контроля курсовой устойчивости, который компенсирует наличие угла наклона дороги и изменения характеристик шины-дороги.
корабль | Определение, типы, старые и факты
пассажирское судно
Смотреть все СМИ
- Ключевые люди:
- Сэр Марк Изамбард Брюнель Сэр Джон Грэм Керр Уильям Фруд Дэвид Уотсон Тейлор
- Связанные темы:
- военный корабль подводная лодка крейсер круизное судно военный корабль
Просмотреть весь связанный контент →
Резюме
Прочтите краткий обзор этой темы
судно , любое большое плавучее судно, способное пересекать открытые воды, в отличие от лодки, которая, как правило, представляет собой меньшее судно. Раньше этот термин применялся к парусным судам с тремя и более мачтами; в наше время обычно обозначает судно водоизмещением более 500 тонн. Подводные корабли обычно называют лодками независимо от их размера.
Раньше этот термин применялся к парусным судам с тремя и более мачтами; в наше время обычно обозначает судно водоизмещением более 500 тонн. Подводные корабли обычно называют лодками независимо от их размера.
При проектировании кораблей используется множество технологий и направлений инженерии, которые также используются на берегу, но императивы эффективной и безопасной эксплуатации в море требуют контроля со стороны уникальной дисциплины. Эта дисциплина правильно называется морской инженерией, но термин военно-морская архитектура обычно используется в том же смысле. В этом разделе последний термин используется для обозначения гидростатических и эстетических аспектов морской техники.
Размеры кораблей даны по длине, ширине и глубине. Длина между перпендикулярами — это расстояние по летней (максимальной) грузовой ватерлинии от носовой стороны форштевня в крайней носовой части судна до кормовой стороны рудерпоста в крайней задней части или до центра баллер руля, если нет рудерпоста. Ширина – это наибольшая ширина корабля. Глубина измеряется посередине длины, от вершины киля до вершины палубной балки со стороны самой верхней непрерывной палубы. Осадка измеряется от киля до ватерлинии, а надводный борт измеряется от ватерлинии до кромки палубы. Эти термины вместе с некоторыми другими, важными для конструкции корабля, приведены на рисунке.
Ширина – это наибольшая ширина корабля. Глубина измеряется посередине длины, от вершины киля до вершины палубной балки со стороны самой верхней непрерывной палубы. Осадка измеряется от киля до ватерлинии, а надводный борт измеряется от ватерлинии до кромки палубы. Эти термины вместе с некоторыми другими, важными для конструкции корабля, приведены на рисунке.
В основе кораблестроения лежит принцип Архимеда, который гласит, что вес статически плавающего тела должен равняться весу вытесняемого им объема воды. Этот закон плавучести определяет не только осадку, при которой судно будет плавать, но и углы, которые оно примет, находясь в равновесии с водой.
Britannica Quiz
Sail Away: Vocabulary at Sea Quiz
Что такое область «рядом, по направлению к или на корме корабля»? Какой морской маневр предполагает быстрое изменение направления движения корабля? Проверьте свои знания. Пройди тест.
Судно может быть спроектировано для перевозки определенного веса груза, а также таких необходимых материалов, как топливо, смазочное масло, экипаж и средства жизнеобеспечения экипажа). Они объединяются, чтобы сформировать общую сумму, известную как мертвый груз. К дедвейту следует добавить вес конструкции корабля, двигательных установок, корпусной техники (недвижительные механизмы) и оборудования (стационарные предметы, имеющие отношение к жизнеобеспечению экипажа). Эти категории веса вместе известны как вес порожнего. Сумма дедвейта и веса корабля порожнем составляет водоизмещение, то есть вес, который должен быть равен весу вытесненной воды, если корабль должен плавать. Конечно, объем воды, вытесняемый кораблем, является функцией размера этого корабля, но, в свою очередь, вес воды, который должен соответствовать водоизмещению, также является функцией размера корабля. Таким образом, на ранних стадиях проектирования корабля трудно предсказать размер корабля, который потребуется для суммы всех весов. Ресурсы военно-морского архитектора включают основанные на опыте формулы, которые обеспечивают приблизительные значения для таких прогнозов. Последующие уточнения обычно дают точные предсказания осадки корабля, то есть глубины воды, на которой будет плавать готовый корабль.
Они объединяются, чтобы сформировать общую сумму, известную как мертвый груз. К дедвейту следует добавить вес конструкции корабля, двигательных установок, корпусной техники (недвижительные механизмы) и оборудования (стационарные предметы, имеющие отношение к жизнеобеспечению экипажа). Эти категории веса вместе известны как вес порожнего. Сумма дедвейта и веса корабля порожнем составляет водоизмещение, то есть вес, который должен быть равен весу вытесненной воды, если корабль должен плавать. Конечно, объем воды, вытесняемый кораблем, является функцией размера этого корабля, но, в свою очередь, вес воды, который должен соответствовать водоизмещению, также является функцией размера корабля. Таким образом, на ранних стадиях проектирования корабля трудно предсказать размер корабля, который потребуется для суммы всех весов. Ресурсы военно-морского архитектора включают основанные на опыте формулы, которые обеспечивают приблизительные значения для таких прогнозов. Последующие уточнения обычно дают точные предсказания осадки корабля, то есть глубины воды, на которой будет плавать готовый корабль.
В некоторых случаях судно может быть предназначено для перевозки грузов с таким высоким коэффициентом загрузки (т. е. объемом на единицу веса), что обеспечение требуемого внутреннего объема является большей проблемой, чем обеспечение конкретного дедвейта. Тем не менее, проблема проектирования под водоизмещение, соответствующее весу корабля, по сути та же.
Оформите подписку Britannica Premium и получите доступ к эксклюзивному контенту. Подпишитесь сейчас
Статическая остойчивость
Точное предсказание осадки судна является необходимым результатом правильного применения гидростатических принципов, но далеко не достаточным. Если многие элементы веса на корабле не распределены с достаточной точностью, судно будет плавать под нежелательными углами крена (боковой наклон) и дифферента (поперечный наклон). Ненулевые углы дифферента могут приподнять концы лопастей гребного винта над поверхностью или увеличить вероятность того, что носовая часть врежется в волны в плохую погоду. Ненулевые углы крена (которые, как правило, намного больше, чем углы дифферента) могут затруднить любую деятельность человека на борту; более того, они опасны тем, что уменьшают запас прочности на опрокидывание. В общем, чтобы избежать таких наклонностей, необходимо распространить принцип Архимеда на первые моменты весов и объемов: совокупный первый момент всех весов должен равняться первому моменту веса вытесненной воды.
Ненулевые углы крена (которые, как правило, намного больше, чем углы дифферента) могут затруднить любую деятельность человека на борту; более того, они опасны тем, что уменьшают запас прочности на опрокидывание. В общем, чтобы избежать таких наклонностей, необходимо распространить принцип Архимеда на первые моменты весов и объемов: совокупный первый момент всех весов должен равняться первому моменту веса вытесненной воды.
На рисунке показано поперечное сечение корабля, плавающего под углом крена θ, вызванным размещением груза ( w ) на определенном расстоянии ( d ) от осевой линии. При этом угле опрокидывающий момент, вычисляемый как w × d × cos θ, равен восстанавливающему моменту Δ × G Z , (Δ — обозначение смещения, а G Z — расстояние от центра тяжести [ G ] до центра плавучести [ Z ]). В этих условиях говорят, что корабль находится в статическом равновесии. Если w убрать, опрокидывающий момент станет равным нулю, а восстанавливающий момент вернет корабль в вертикальное положение. Таким образом, судно оценивается как стабильное. Момент будет действовать в стабильном направлении только до тех пор, пока точка M («метацентр», точка, где выталкивающая сила пересекает среднюю плоскость) находится выше G (центр тяжести корабля и его содержимого). . Если M ниже G , силы веса и плавучести будут стремиться увеличить угол крена, и равновесие будет неустойчивым. Расстояние от G до M , принимаемое за положительное, если M выше G , называется поперечной метацентрической высотой.
Таким образом, судно оценивается как стабильное. Момент будет действовать в стабильном направлении только до тех пор, пока точка M («метацентр», точка, где выталкивающая сила пересекает среднюю плоскость) находится выше G (центр тяжести корабля и его содержимого). . Если M ниже G , силы веса и плавучести будут стремиться увеличить угол крена, и равновесие будет неустойчивым. Расстояние от G до M , принимаемое за положительное, если M выше G , называется поперечной метацентрической высотой.
Значение метацентрической высоты обычно находится только для условия нулевого крена; следовательно, это точная мера устойчивости только для небольших возмущений, например таких, которые вызывают крен не более чем на 10 °. Для больших углов «выпрямляющий рычаг» G Z используется для измерения стабильности. При любом анализе устойчивости значение G Z наносится на график во всем диапазоне углов крена, для которых оно является положительным или восстанавливающим.