Принцип работы электрических машин
Классифицируют электрические машины по назначению, принципу действия и роду тока, мощности, по частоте вращения.
- Классификация по назначению
- Классификация по роду тока и принципу действия
- Классификация по мощности
- Классификация по частоте вращения
- Устройство и принцип работы электромобиля. Плюсы и минусы электрокаров
- Устройство электромобиля и принцип его работы
- Типы устройств электромобиля
- Плюсы и минусы электрокаров
- Источники:
Классификация по назначению
Электрические машины по своему назначению подразделяют на:
- Электромашинные генераторы. Они выполняют преобразовании энергии механической (вращение) в электрическую. Они устанавливаются на электрических станциях, автомобилях, самолетах, тепловозах, передвижных электростанциях, кораблях и в других установках. На электростанциях генератор приводят в движение мощные паровые турбины, на автомобилях, тепловозах и прочих транспортных средствах – газовые турбины или двигатели внутреннего сгорания.


- Электрические двигатели – выполняют функции обратные генератору, а именно, преобразуют электрическую энергию в механическую. Они используются для приведения в движение множества установок в промышленности, сельском хозяйстве, транспорте, в быту, в системах связи. В системах автоматического регулирования их активно используют в качестве регулирующих, программирующих и исполнительных органов.
- Электромашинные преобразователи – выполняют преобразования электрических величин. Например, могут преобразовывать постоянный ток в переменный и наоборот, изменять частоту, число фаз и другие функции. В связи с активным внедрением полупроводниковых преобразователей электромашинные преобразователи в новых проектах используют крайне редко (практически никогда), а уже установленные электромашинные преобразователи активно модернизируются полупроводниковыми (тиристорными и транзисторными).

- Электромашинные компенсаторы – осуществляют регулирование коэффициента мощности cos φ, а именно баланса реактивной мощности в сети.
- Электромашинные усилители – используют для объектов большой мощности. Это, своего рода усилители, они усиливают сигналы большой мощности, при этом управление ведется сигналами малой мощности. Роль этих усилителей, как и электромашинных компенсаторов, в современном мире практически сведена на нет из – за применения полупроводниковых усилителей (транзисторных и тиристорных).
- Электромеханические преобразователи сигналов – это, как правило, электрические микромашины (например, сельсины), которые довольно широко используют в системах автоматического управления.
Классификация по роду тока и принципу действия
Как известно, существует два рода электрического тока – переменный и постоянный.
Исходя из этого, электрические машины также подразделяют по роду тока на два вида – машины электрические переменного тока и машины электрические постоянного тока.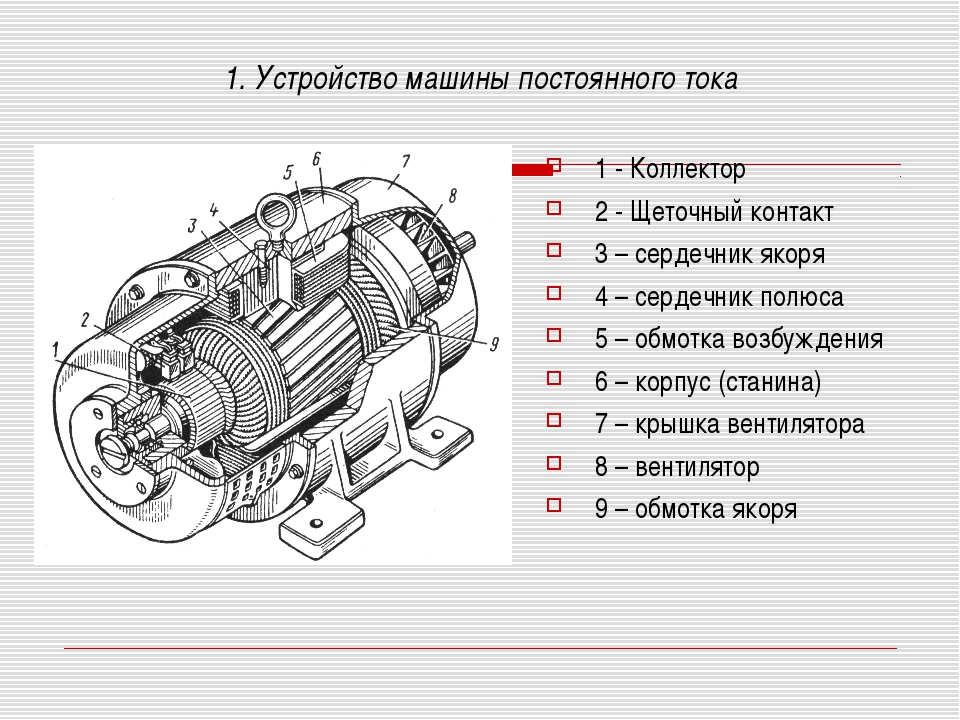
Электрические машины переменного тока
- Трансформаторы – наиболее широко применимы в сетях электроснабжения для преобразования напряжений (повышение и понижение). Также довольно широко их применяют в выпрямительных установках для согласования напряжений, в устройствах связи, вычислительной техники и автоматики. Часто применяются и для проведения измерений электрических (измерительные трансформаторы), а также для различных функциональных преобразований (трансформаторы вращающиеся).
- Асинхронные электродвигатели – самые распространенные в мире благодаря своей относительной простоте и низкой стоимости. Применяются в промышленных электроустановках (станки, краны, подъемные машины) и в бытовых (компрессора холодильников, вентиляторы, пылесосы). Довольно широкое применение получили однофазные и двухфазные асинхронные управляемые электродвигатели, а также сельсины и тахогенераторы асинхронные.
- Синхронные электродвигатели – наиболее часто применяемы в качестве генераторов электрического тока на электрических станциях.
 Также применимы в качестве генераторов повышенной частоты в различных источниках питания (например, на кораблях, тепловозах, самолетах). Также в электроприводах большой мощности применяют синхронные электродвигатели, которые могут также помимо выполнения полезной работы и также влиять на коэффициент мощности сети cos φ.
Также применимы в качестве генераторов повышенной частоты в различных источниках питания (например, на кораблях, тепловозах, самолетах). Также в электроприводах большой мощности применяют синхронные электродвигатели, которые могут также помимо выполнения полезной работы и также влиять на коэффициент мощности сети cos φ. - Коллекторные машины – используют их только в качестве электродвигателей. Это вызвано сложностью их конструкции и необходимостью тщательного ухода. В бытовых электроприборах и устройствах автоматики применяются универсальные коллекторные электродвигатели, способные работать на двух родах тока – постоянном и переменном.
Электрические машины постоянного тока
Они работают практически во всех сферах промышленности и транспорта.
В связи с большим распространением машин постоянного тока также были распространены и генераторы постоянного тока. Они использовались в качестве источников постоянного напряжения для зарядки аккумуляторных батарей, на транспорте (тепловозы, теплоходы и другие), а также в промышленности (система генератор — двигатель). Ввиду развития полупроводниковой техники генераторы постоянного тока постепенно вытесняются из работы и активно заменяются на генераторы переменного тока работающих в паре с полупроводниковым преобразователем.
Ввиду развития полупроводниковой техники генераторы постоянного тока постепенно вытесняются из работы и активно заменяются на генераторы переменного тока работающих в паре с полупроводниковым преобразователем.
Также применяются электродвигатели постоянного тока и в системах автоматического управления АСУ в качестве усилителей электромашинных, тахогенераторов и исполнительных электродвигателей.
Электрические микромашины
Микромашины активно применяются в устройствах автоматических.
Их подразделяют на группы:
- Силовые микродвигатели – приводят во вращения механизмы различных автоматических устройств. Например, самопишущие устройства и другие.
- Исполнительные (управляемые) микромашины – выполняют преобразование энергии электрической в механическую, то есть ведут обработку определенных команд из вне.
- Тахогенераторы – преобразуют механическую энергию вращения вала в электрический сигнал напряжения, который пропорционален скорости вращения вала.

- Вращающиеся трансформаторы – на выходе этих трансформаторов устанавливается напряжение, пропорциональное функции углу поворота ротора, например синусу или косинусу данного угла или же самому углу.
- Машины синхронной связи – (магнесины или сельсины) осуществляют синфазный и синхронный поворот или же вращения нескольких осей, не имеющих между собой механической связи.
- Микромашины гироскопических приборов – вращают роторы гироскопов с довольно высокой частотой, а также производят коррекцию их положения.
- Электромашинные усилители и преобразователи.
Классификация по мощности
- Микромашины – их мощность может варьироваться от нескольких долей ватта до 500 Вт. Они могут производится для двух родов тока — постоянного и переменного. Могут быть рассчитаны как на работу при нормальной (промышленной) частоте 50 Гц, так и при повышенной ( от 400 до 2000 Гц).
- Электродвигатели малой мощности – от 0,5 до 10 кВт.
 Также могут изготавливаться для двух родов тока – постоянного и переменного нормальной и повышенной частоты.
Также могут изготавливаться для двух родов тока – постоянного и переменного нормальной и повышенной частоты. - Электродвигатели средней мощности – от 10 кВт до нескольких сотен ватт.
- Электродвигатели большой мощности – мощность данных машин больше нескольких сотен киловатт. Такие электродвигатели предназначены для работы на постоянном и переменном напряжении нормальной частоты. Исключение могут составлять электродвигатели специального назначения (авиация, флот) и другие.
Классификация по частоте вращения
- До 300 об/мин — тихоходные.
- От 300 до 1500 об/мин — средней быстроходности.
- От 1500 до 6000 об/мин — быстроходные.
- Более 6000 об/мин — сверхбыстроходные.
Микромашины же могут изготавливать с частотой вращения вала от нескольких оборотов в минуту до 60 000 оборотов в минуту. Скорость вращения машин средней и большой мощности, как правило, не превышает 3000 об/мин.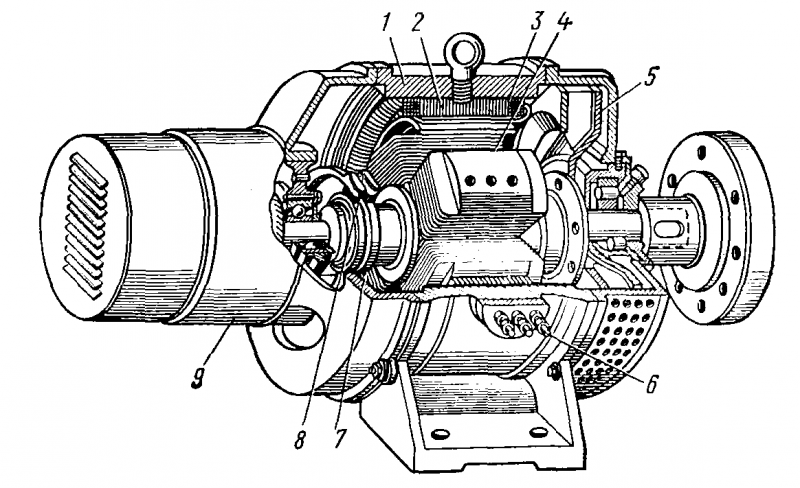
Устройство и принцип работы электромобиля. Плюсы и минусы электрокаров
Устройство электромобиля и принцип его работы
Принцип работы электромобиля заключается в следующем. В нем задействован механизм электромагнитной индукции, который состоит в том, что при наличии переменного электрического тока в проводнике возникает магнитное поле, которое по закону Ампера выполняет отклоняющее действие.
В моторе существуют два основных компонента: ротор и статор.
Статор остается постоянно неподвижным и по нему пропускается электрический ток определенной частоты.
Генерируемое в статоре магнитное поле действует на ротор и тот начинает вращаться. Получаемая механическая энергия используется для движения транспортного средства. Скорость движка прямо пропорциональна частоте тока и количеству установленных магнитных полюсов.
Ток для питания статора генерируется установленными на борту батареями. В зависимости от модели машины, батареи могут иметь разную емкость, конструкцию, особенности используемых механизмов работы.
Типы устройств электромобиля
Выделяют такие машины на электричестве:
- Внутригородские. Имеют невысокую мощность и скорость передвижения, на них установлены специальные ограничения по максимальной мощности. Небольшого диаметра колеса и малый вес позволяют двигаться в нормальном городском режиме;
- Микроэлектромобили. Созданы с учетом плотного городского транспортного потока, имеют батарею небольшой емкости. Используются для небольших переездов, поездок в магазин, на работу и назад и т.п.;
- Различные креативные варианты, типа трициклы;
- Обычные авто. Привычные легковушки, типа некоторых популярных моделей от Tesla;
- Грузовые. Пока еще не слишком распространены, но в перспективе могут использоваться в крупных городах для внутренних перевозок и уменьшения выбросов в атмосферу;
- Троллейбусы, трамваи, автобусы на электродвижках также являются довольно популярным видом транспорта в любом крупном городе.
Плюсы и минусы электрокаров
Плюсы:
- Минимальные расходы на заправку.

- Простота сервисного обслуживания.
- Тихая работа мотора.
- Отсутствие опасных выхлопных газов.
- Покупка на перспективу.
Минусы:
- Небольшой выбор авто и высокая цена.
- Ограниченное количество необходимых заправок.
- Высокая цена на батареи.
- Ограниченность использования электроники, например, кондиционера, который будет быстро поглощать имеющийся заряд АКБ.
Источники:
- Студопедия
- lektsii.org
- Всё об энергетике, электротехнике, электронике
- мастерок
- elenergi.ru
- SYL.ru
- Рамблер/авто
- Asutpp
- Электрознаток.ру
- Промразвитие
- FB.ru
- OdinElectric.ru
- meanders.ru
- Электромеханика
Понравилась статья? Расскажите друзьям:
Оцените статью, для нас это очень важно:
Проголосовавших: 2 чел.
Средний рейтинг: 5 из 5.
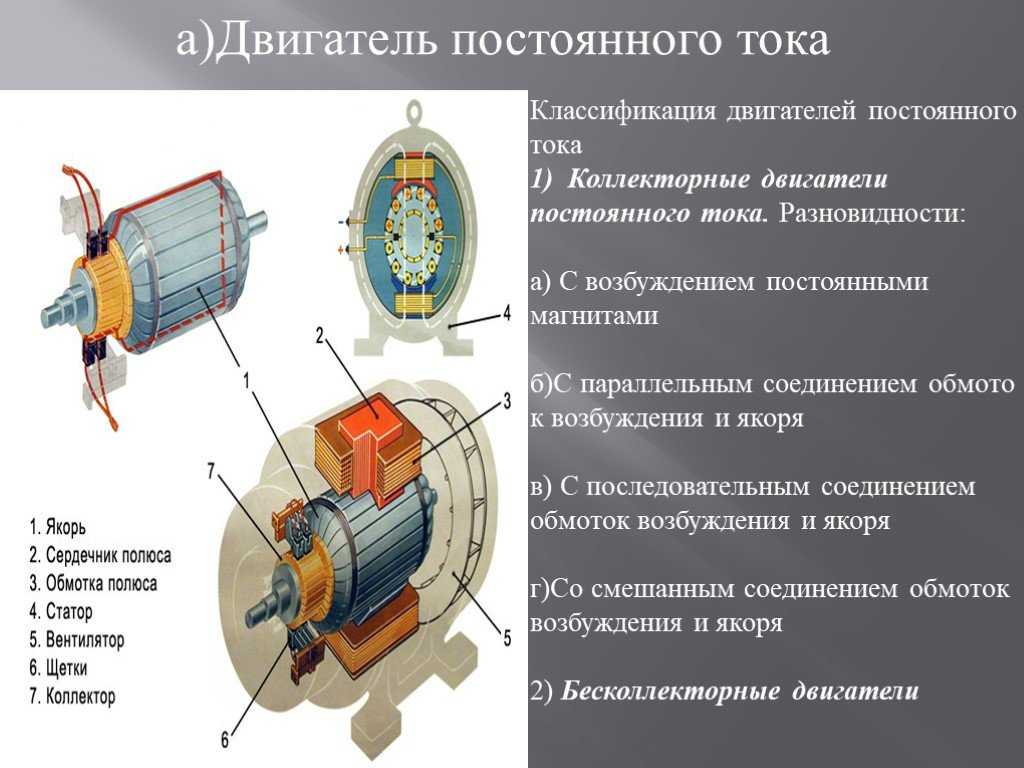
Принцип действия, устройство электрических машин постоянного тока
По роду тока все современные электрические машины делятся на машины постоянного и переменного тока. Несмотря на большое разнообразие конструкций, общие принципы работы электрических машин одинаковы. Все современные электрические машины работают на основе явлений электромагнитной индукции.
Постоянным называется ток, протекающий по проводнику только в одном направлении. Получение постоянного тока может быть двояким: от генераторов постоянного тока или из переменного тока путем его выпрямления при помощи специальных устройств-выпрямителей, преобразующих переменный ток в постоянный.
Простейший генератор постоянного тока (рис. 168, а и б) имеет полюсы электромагнита N и S, между которыми вращается виток проволоки в виде рамки, концы которой припаяны к полукольцам А и Б, вращающимся вместе с витком.
Полукольца А и Б изолированы между собой и от вала и представляют из себя в простейшем виде коллектор, служащий для выпрямления тока во внешней цепи. На полукольца опираются неподвижные щетки I и II, по которым ток с полуколец А и Б направляется во внешнюю цепь. При вращении в магнитном поле в рамке будет индуктироваться переменная по величине и направлению электродвижущая сила. Как было рассмотрено ранее, эта э. д. с. изменяется по синусоиде и зависит от положения, занимаемого проводниками а и б в магнитном поле. При этом направление э. д. с., индуктируемой в каждый данный момент в витке, определяется по правилу правой руки.
На полукольца опираются неподвижные щетки I и II, по которым ток с полуколец А и Б направляется во внешнюю цепь. При вращении в магнитном поле в рамке будет индуктироваться переменная по величине и направлению электродвижущая сила. Как было рассмотрено ранее, эта э. д. с. изменяется по синусоиде и зависит от положения, занимаемого проводниками а и б в магнитном поле. При этом направление э. д. с., индуктируемой в каждый данный момент в витке, определяется по правилу правой руки.
В те моменты, когда ток в витке меняет свое направление, полукольца меняют щетки (рис. 168, а и б), поэтому во внешней цепи ток будет иметь все время одно и то же направление, но будет меняться по величине. График изменения э.д.с. в витке можно изобразить кривой, показанной на схеме в (рис. 168), а график изменения тока во внешней цепи, соединенной с генератором, будет иметь вид, изображенный на схеме г. Как видно из последнего графика, э.д.с. во внешней цепи за полный оборот рамки не меняется по направлению, а меняется по величине от нуля до максимума, снова до нуля и т. д. Поэтому э.д.с. в таком виде имеет большую пульсацию, и ток, протекающий по замкнутому контуру, носит название пульсирующего. Чтобы «сгладить» пульсацию и получить ток во внешней цепи, близкий к постоянному по величине, в генераторах устанавливают не один виток с двумя полукольцами, а очень много витков, концы которых припаивают к коллекторным пластинам. При этом витки оказываются сдвинутыми относительно друг друга на небольшой угол и при вращении всех витков пульсация значительно уменьшается.
д. Поэтому э.д.с. в таком виде имеет большую пульсацию, и ток, протекающий по замкнутому контуру, носит название пульсирующего. Чтобы «сгладить» пульсацию и получить ток во внешней цепи, близкий к постоянному по величине, в генераторах устанавливают не один виток с двумя полукольцами, а очень много витков, концы которых припаивают к коллекторным пластинам. При этом витки оказываются сдвинутыми относительно друг друга на небольшой угол и при вращении всех витков пульсация значительно уменьшается.
В этом случае ток, вырабатываемый генератором, будет практически постоянным как по направлению, так и по величине. На практике в генераторах берется такое количество витков обмоток и коллекторных пластин, что получаемая на щетках э.д.с. имеет совершенно незначительную пульсацию (порядка 1% от среднего значения э.д.с.) и ее величина поэтому считается постоянной.
Конструкции основных элементов генераторов и двигателей постоянного тока, вследствие общности их принципов и обратимости работы, одни и те же.
На рис. 169 показаны основные части и компоновка генератора постоянного тока. Генератор состоит из следующих основных частей: станины с закрепленными в ней полюсами — электромагнитами, якоря с обмоткой и коллектором, токоснимающего устройства (щеткодержатели, щетки, траверсы), переднего и заднего подшипниковых щитов.
Станиныу современных электрических машин отливаются из стали и в зависимости от типа электрической машины выполняются различной формы (прямоугольные, квадратные, восьмигранные, круглые и т. д.).
К станине крепится магнитная система (создает магнитный поток), состоящая из полюсных сердечников (рис. 170).
Вследствие общности принципов работы основные элементы конструкции генераторов и дви¬гателей постоянного тока одни и те же.
Полюсные сердечники с полюсными наконечниками образуют полюсы электромагнита, служащие для создания магнитного поля. Полюс генератора, как и всякий электромагнит, состоит из сердечника и надетой на него катушки, по которой проходит электрический ток, называемый током возбуждения. Этот ток создает магнитный поток. Катушки возбуждения составляют обмотку возбуждения машины, названную так потому, что при прохождении по ней тока она создает (возбуждает) магнитное поле генератора. Количество полюсов у генератора, как правило, четное (2, 4, 6 и более). При этом северные и южные полюсы чередуются между собой. Полюсные сердечники, как и полюсные наконечники, собираются из отдельных листов (пластин) электротехнической стали толщиной 0,5 мм. Сердечники полюсов изготовляются отдельно от станины и крепятся к ней, как это показано на рис. 170.
Этот ток создает магнитный поток. Катушки возбуждения составляют обмотку возбуждения машины, названную так потому, что при прохождении по ней тока она создает (возбуждает) магнитное поле генератора. Количество полюсов у генератора, как правило, четное (2, 4, 6 и более). При этом северные и южные полюсы чередуются между собой. Полюсные сердечники, как и полюсные наконечники, собираются из отдельных листов (пластин) электротехнической стали толщиной 0,5 мм. Сердечники полюсов изготовляются отдельно от станины и крепятся к ней, как это показано на рис. 170.
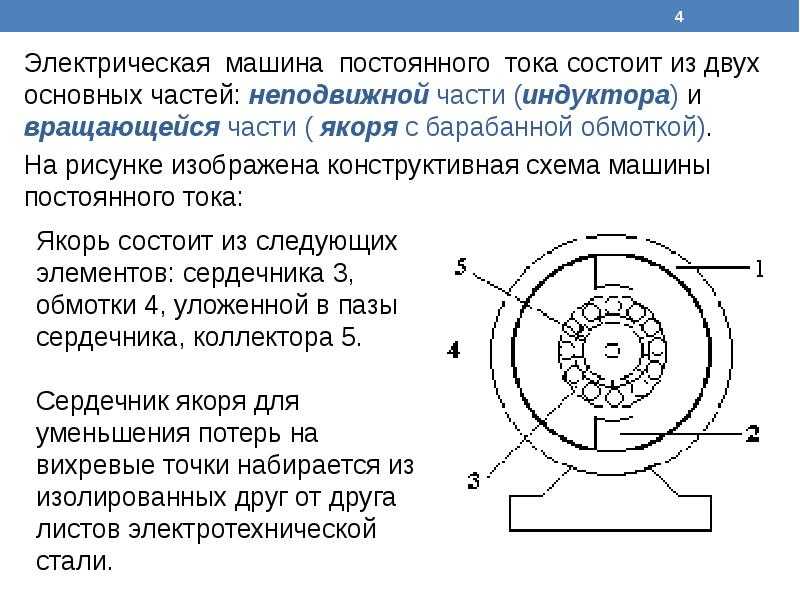
Якорь — вращающаяся часть машины — служит для несения обмотки, в которой индуктируется переменная э.д.с.; он состоит из сердечника и обмотки. В современных машинах сердечник якоря собирается из листов электротехнической стали толщиной 0,35—0,5 мм, изолированных друг от друга специальной тонкой бумагой или покрытых изолирующим лаком. Отдельные листы сердечника якоря штампуются такой формы, чтобы после сборки их на наружной поверхности якоря образовались пазы, в которые затем укладываются секции обмоток якоря из изолированной медной проволоки.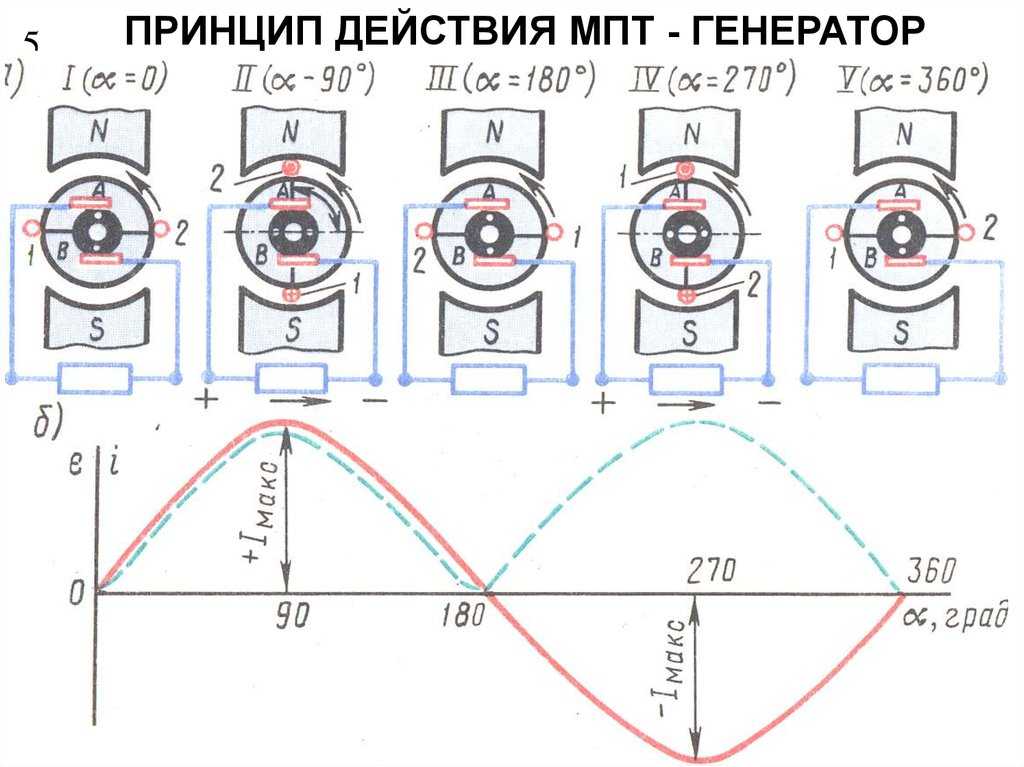 Секции обмоток соединяются между собой в определенной последовательности.
Секции обмоток соединяются между собой в определенной последовательности.
Набранный таким образом якорь надевается на стальной вал машины, на котором он закрепляется при помощи шпонки.
На одном валу с якорем насажен коллектор и вентилятор. Коллектор представляет собой полый барабан, собранный из медных пластин, изолированных друг от друга и от вала машины. Количество пластин равно количеству секций якоря, так как к каждой коллекторной пластине припаивается начало одной и конец другой секции. Пластины изготовляются из твердотянутой меди соответствующего профиля и изолируются друг от друга прокладками из миканита (склеенные под давлением листочки слюды). Для соединения коллекторных пластин с концами обмотки в углу каждой пластины вырезается углубление, в которое вводят (вбивают) концы секций, произведя их пайку.
Коллектор является одной из наиболее ответственных частей электрической машины.
Над коллектором укрепляется траверса со щеткодержателями. Щетки вставляются в гнезда щеткодержателей и прижимаются к коллектору пружинами, натяжение которых можно регулировать. Щетки должны обеспечивать хороший контакт, чтобы при работе не вызывать искрения, повышения сопротивления и нагрева.
Щетки вставляются в гнезда щеткодержателей и прижимаются к коллектору пружинами, натяжение которых можно регулировать. Щетки должны обеспечивать хороший контакт, чтобы при работе не вызывать искрения, повышения сопротивления и нагрева.
В современных электрических машинах применяют угольные, меднографитные и графитные щетки.
Якорь с коллектором вращается в подшипниках, находящихся в подшипниковых щитах. Последние крепятся с боков болтами к станине. Между якорем и башмаками полюсных сердечников имеется небольшой зазор, называемый междужелезным пространством.
На корпусе машины обычно устанавливается клеммная коробка, в которой имеются изолированные друг от друга и от корпуса машины болтовые зажимы — клеммы, служащие для соединения машины с сетью.
Основные неподвижные части электрической машины образуют статор, вращающиеся — ротор. В машинах постоянного тока якорь является ротором, а магнитная система (иногда называется индуктором)—статором.
Принцип действия машин постоянного тока
Принцип действия машин постоянного тока.
Принцип действия генератора. Простейший генератор можно представить в виде витка, вращающегося в магнитном поле (рис. 1.4, а, б). Концы витка выведены на две пластины коллектора. К коллекторным пластинам прижимаются неподвижные щетки, к которым подключается внешняя цепь.
Принцип работы генератора основан на явлении электромагнитной индукции. Пусть виток приводится во вращение от внешнего приводного двигателя ПД. Проводники активной части витка пересекают магнитное поле и в них по закону электромагнитной индукции наводятся ЭДС e1 и e2, направление которых определяется по правилу правой руки. При вращении витка по направлению движения часовой стрелки в верхнем проводнике, находящемся под северным полюсом, ЭДС направлена от нас, а в нижнем, находящемся под южным полюсом, – к нам. По ходу витка ЭДС складываются, результирующая ЭДС е = е1 – е2.
По ходу витка ЭДС складываются, результирующая ЭДС е = е1 – е2.
Если внешняя цепь замкнута, то по ней потечет ток, направленный от нижней щетки к потребителю и от него – к верхней щетке. Нижняя щетка оказывается положительным выводом генератора, а верхняя – отрицательным. При повороте витка на 180° проводники из зоны одного полюса переходят в зону другого полюса и направление ЭДС в них изменяется на обратное. Одновременно верхняя коллекторная пластина входит в контакт с нижней щеткой, а нижняя – с верхней, направление тока во внешней цепи не изменяется. Таким образом, коллекторные пластины не только обеспечивают соединение вращающего витка с внешней цепью, но и выполняют роль переключающегося устройства, т. е. являются простейшим механическим выпрямителем.
Принцип действия двигателя. То же устройство работает в режиме электрического двигателя (рис. 1.5), если к щеткам подвести постоянное напряжение. Под действием напряжения U через щетки, пластины коллектора и виток потечет ток i. По закону электромагнитной силы (закон Ампера) взаимодействие тока и магнитного поля В создает силу f, которая направлена перпендикулярно i. Направление силы f определяется правилом левой руки (рис. 1.5): на верхний проводник сила действует вправо, на нижний – влево. Эта пара сил создает вращающий момент Мвр, поворачивающий виток по часовой стрелке. При переходе верхнего проводника в зону южного полюса, а нижнего – в зону северного полюса концы проводников и соединенные с ними коллекторные пластины вступают в контакт со щетками другой полярности.
По закону электромагнитной силы (закон Ампера) взаимодействие тока и магнитного поля В создает силу f, которая направлена перпендикулярно i. Направление силы f определяется правилом левой руки (рис. 1.5): на верхний проводник сила действует вправо, на нижний – влево. Эта пара сил создает вращающий момент Мвр, поворачивающий виток по часовой стрелке. При переходе верхнего проводника в зону южного полюса, а нижнего – в зону северного полюса концы проводников и соединенные с ними коллекторные пластины вступают в контакт со щетками другой полярности.
Рис.1.5
Направление тока в проводниках витка изменяется на противоположное, а направление сил f, момента Мвр и тока во внешней цепи не изменяется. Виток непрерывно будет вращаться в магнитном поле и может приводить во вращение вал рабочего механизма (РМ).
Таким образом, коллектор в режиме двигателя не только обеспечивает контакт внешней цепи с витком, но и выполняет функцию механического инвертора, т. е. преобразует постоянный ток во внешней цепи в переменный ток в витке.
е. преобразует постоянный ток во внешней цепи в переменный ток в витке.
Рассмотрение принципа действия показывает, что машина постоянного тока может работать как в режиме генератора, так и в режиме двигателя, т. е. обладает свойством обратимости.
Противодействующий момент и противо-ЭДС. При работе машины в режиме генератора по замкнутой внешней цепи и витку обмотки якоря протекает ток, направление которого совпадает с направлением ЭДС (рис. 1.4,6), взаимодействие тока с магнитным полем полюсов создает момент М, направленный в рассматриваемом случае против часовой стрелки. Так как приложенный к витку вращающий момент приводного двигателя Мвр направлен по часовой стрелке, то возникающий при работе генератора момент называется противодействующим моментом Мnp. По существу возникновение Мпр — это реакция машины на воздействие внешнего момента Мвр, а физическая природа противодействующего момента та же, что и вращающего момента у двигателя. В установившемся режиме работы генератора между Мвр и Мпр устанавливается равновесие и Мвр=Мпр.
В установившемся режиме работы генератора между Мвр и Мпр устанавливается равновесие и Мвр=Мпр.
При работе машины в режиме двигателя проводники якоря пересекают магнитное поле и в них наводится ЭДС (рис. 1.5,б). Ее направление определяется по правилу правой руки. В рассматриваемом случае она направлена против тока и, следовательно, навстречу приложенному напряжению сети U и поэтому называется противо-ЭДС Enp. Физическая природа противо-ЭДС та же, что и ЭДС генератора. В установившемся режиме работы двигателя между Enp и U устанавливается равновесие и можно считать, что Enp ≈ U .
Таким образом, при работе машины постоянного тока в любом режиме во вращающихся проводниках наводится ЭДС Е и возникает момент М, но роль их в разных режимах различная.
Электрические машины. Типы и принцип работы
Электричество не существует в природе в какой-либо полезной форме. Она должна генерироваться из любых других источников энергии, таких как солнечная, ветровая, гидро-, тепловая, атомная и т. д. Фотогальванические элементы помогают нам улавливать энергию солнечного света, а генераторы используются для преобразования механической энергии, доступной в других формах, в электричество. Механическая энергия может быть получена от ветра, текущей воды и пара с помощью турбин. Двигатели используются для обратного преобразования электричества в механическую энергию. Итак, в совокупности электрические машины — это устройства, преобразующие механическую энергию в электрическую и наоборот.
Она должна генерироваться из любых других источников энергии, таких как солнечная, ветровая, гидро-, тепловая, атомная и т. д. Фотогальванические элементы помогают нам улавливать энергию солнечного света, а генераторы используются для преобразования механической энергии, доступной в других формах, в электричество. Механическая энергия может быть получена от ветра, текущей воды и пара с помощью турбин. Двигатели используются для обратного преобразования электричества в механическую энергию. Итак, в совокупности электрические машины — это устройства, преобразующие механическую энергию в электрическую и наоборот.
Давайте начнем с трансформаторов, чтобы вы могли понять основную концепцию электромагнитной индукции, которая возникает в каждой электрической машине.
Содержание
Классификация электрических машин
В основном электрические машины классифицируются на
- Статические электрические машины – трансформаторы
- Вращающиеся электрические машины – двигатели (преобразуют электрическую энергию в механическую) и генераторы (преобразуют механическую энергию в электрическую).
 энергия)
энергия)
Любое статическое устройство, которое может передавать переменный ток из одной цепи в другую за счет электромагнитной индукции, можно рассматривать как трансформатор. Трансформаторы используются для преобразования переменного тока с одного уровня напряжения на другой уровень напряжения.
Базовый трансформатор состоит из двух катушек, соединенных магнитным сердечником. В случае трехфазных трансформаторов будет присутствовать два набора катушек на фазу. Один набор катушек известен как первичная обмотка, а другой известен как вторичная обмотка. Эти две обмотки изолированы друг от друга и магнитно связаны через железный сердечник.
Источник: https://www.electronics-tutorials.ws/transformer/transformer-basics.html Переменное напряжение подключено к первичной обмотке. При подключении создается переменный магнитный поток с амплитудой, пропорциональной величине приложенного напряжения, частоте и числу витков. Этот поток связывается со вторичной обмоткой и индуцирует напряжение, пропорциональное количеству вторичных витков.
Этот поток связывается со вторичной обмоткой и индуцирует напряжение, пропорциональное количеству вторичных витков.
Отношение количества первичных и вторичных витков известно как коэффициент трансформации трансформатора . Любое соотношение преобразования напряжения возможно и может быть достигнуто за счет правильного соотношения количества первичных и вторичных витков.
Коэффициент трансформации напряжения определяется по формуле:
Если вторичное напряжение больше первичного, трансформатор называется повышающим. Если первичное напряжение больше вторичного, то трансформатор называется понижающим.
Чтобы обеспечить эффективное связывание магнитного потока, сердечник (конструкция, поддерживающая обмотки) изготовлен из сплава железа или стали с высокой проницаемостью. Трансформаторы доступны в различных размерах, формах и конструкциях, но основной принцип остается тем же.
Электроэнергия вырабатывается на генерирующих станциях среднего напряжения (6,6кВ, 11кВ, 33кВ). Чтобы минимизировать потери при передаче, генерируемое напряжение повышается до более высоких напряжений. Здесь используются повышающие трансформаторы. Понижающие трансформаторы используются для снижения передаваемого напряжения вблизи центров нагрузки. Это делает трансформатор самой важной электрической машиной.
Чтобы минимизировать потери при передаче, генерируемое напряжение повышается до более высоких напряжений. Здесь используются повышающие трансформаторы. Понижающие трансформаторы используются для снижения передаваемого напряжения вблизи центров нагрузки. Это делает трансформатор самой важной электрической машиной.
Вращающиеся электрические машины, используемые для преобразования механической энергии в электрическую или наоборот. Существует три основных типа вращающихся электрических машин .
- Электрические машины постоянного тока – двигатели постоянного тока и генераторы постоянного тока
- Синхронные машины – генераторы переменного тока и синхронные двигатели
- Асинхронные двигатели или асинхронные машины
Все вращающиеся электрические машины имеют две общие основные части. Первая — это вращающаяся часть, известная как ротор, а вторая — неподвижная часть, называемая статором. Эти детали изготовлены из высокопроницаемого магнитного материала, такого как кремнистая сталь. Давайте углубимся в детали каждого из них.
Первая — это вращающаяся часть, известная как ротор, а вторая — неподвижная часть, называемая статором. Эти детали изготовлены из высокопроницаемого магнитного материала, такого как кремнистая сталь. Давайте углубимся в детали каждого из них.
Машины постоянного тока доступны в различных размерах и формах: от небольших шаговых двигателей в принтерах до огромных тяговых двигателей. Машина постоянного тока состоит из обмотки возбуждения на статоре и якоря на роторе.
Вид в разрезе электрических машин постоянного токаКак известно, электромагнитное преобразование требует относительного движения между обмотками возбуждения и обмотками якоря. Для достижения относительного движения между статором и ротором якорь вращается снаружи с помощью первичного двигателя (турбины или двигателя). Когда якорь вращается мимо полюсов возбужденного поля, в якоре индуцируется ЭДС.
ЭДС индукции носит переменный характер. Чтобы преобразовать его в постоянный ток, два конца якоря подключаются к коммутатору.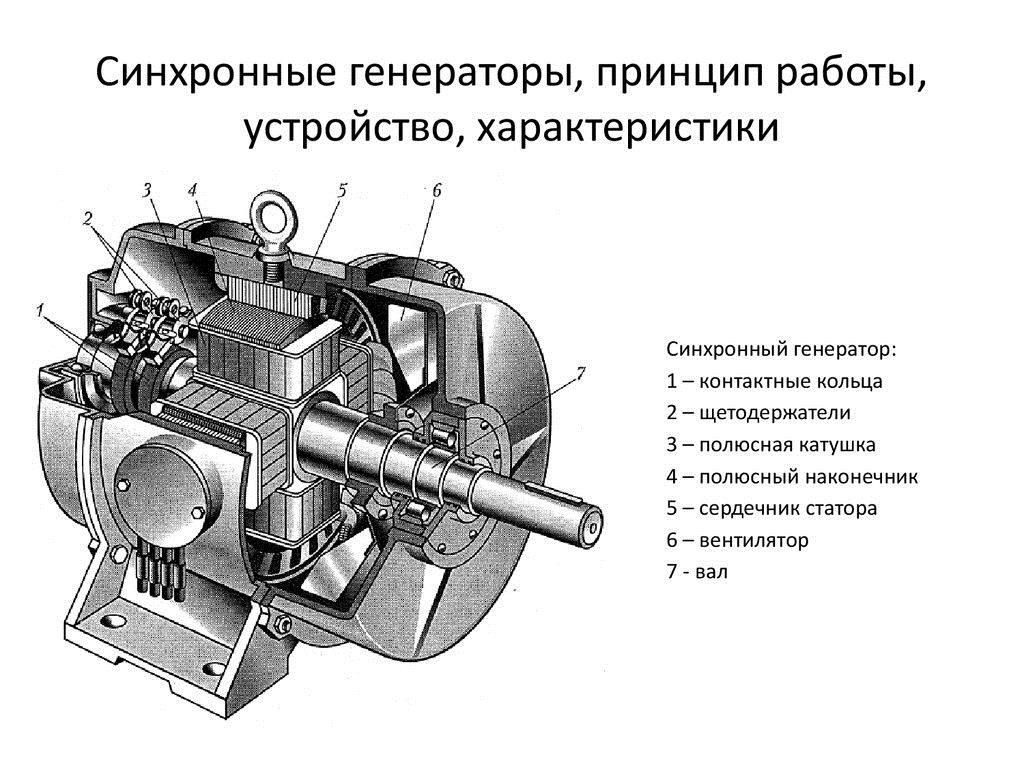 Коллекторы представляют собой металлические стержни, насаженные на валы машин и соединенные с обмоткой якоря, которые меняют направление тока каждые пол-оборота. Коммутатор разделен на несколько сегментов, и каждый сегмент изолирован друг от друга. Угольные щетки используются для сбора тока от коммутатора.
Коллекторы представляют собой металлические стержни, насаженные на валы машин и соединенные с обмоткой якоря, которые меняют направление тока каждые пол-оборота. Коммутатор разделен на несколько сегментов, и каждый сегмент изолирован друг от друга. Угольные щетки используются для сбора тока от коммутатора.
В машинах постоянного тока якорь всегда остается на роторе для преобразования наведенного переменного напряжения в постоянное. Якорь состоит из нескольких пазов и установлен на валу, который опирается на подшипник.
Двигатели постоянного тока и генераторы постоянного тока имеют одинаковую конструкцию. Обычно двигатель можно использовать как генератор и наоборот. В зависимости от соединения обмоток статора и ротора машины постоянного тока можно классифицировать следующим образом:
- Машины постоянного тока с независимым возбуждением
- Машина постоянного тока с самовозбуждением
В этом типе обмотки якоря и возбуждения возбуждаются отдельно. Обмотку возбуждения также можно заменить постоянным магнитом.
Обмотку возбуждения также можно заменить постоянным магнитом.
Якорь и обмотки возбуждения двигателя с самовозбуждением питаются от одного и того же источника питания. Возможны следующие соединения.
- Шунтовое соединение – Якорь и возбуждение соединены параллельно.
- Последовательное соединение – Якорь и возбуждение соединены последовательно.
- Составное соединение
Конструктивные особенности двигателей постоянного тока такие же, как у генераторов. Они работают на свойстве притяжения между разными магнитными полюсами и отталкивания между одинаковыми магнитными полюсами. Регулируя напряжения возбуждения и якоря, можно регулировать скорость двигателя постоянного тока. Кроме того, различные типы методов возбуждения делают двигатели постоянного тока более универсальными.
Скоростно-крутящие характеристики двигателей постоянного тока Синхронные машины Генераторы переменного тока, присутствующие почти на всех турбинных электростанциях по всему миру, являются синхронными машинами. Генератор также может работать как двигатель, если на ротор подается постоянный ток, а на статор подается переменное напряжение. Мы кратко рассмотрим принцип работы синхронных машин. Кредит изображения: https://www.tonex.com/
Генератор также может работать как двигатель, если на ротор подается постоянный ток, а на статор подается переменное напряжение. Мы кратко рассмотрим принцип работы синхронных машин. Кредит изображения: https://www.tonex.com/
Синхронная машина имеет якорь на статоре и поле на роторе. На ротор (обмотку возбуждения) подается постоянный ток, который превращает его в электромагнит. В машине PMDC (постоянный магнит постоянного тока) обмотка возбуждения ротора заменена постоянным магнитом.
Ротор может быть цилиндрического типа или с явно выраженными полюсами. Цилиндрический; роторы механически стабильны на высоких скоростях и используются в больших турбогенераторах, тогда как явнополюсные машины используются в тихоходных гидрогенераторах.
Принцип работы синхронных машин Генераторы переменного тока Когда на ротор подается постоянное напряжение, он становится электромагнитом. Если ротор приводится в движение первичным двигателем, между магнитным потоком ротора и проводником статора возникает относительное движение.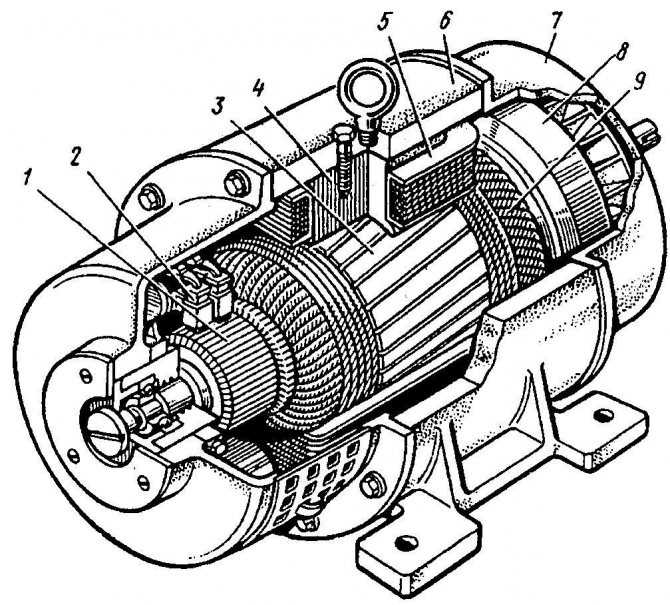 Поэтому по закону Фарадея в обмотке статора индуцируется ЭДС. ЭДС индукции носит переменный характер и частота чередования будет пропорциональна скорости вращения ротора.
Поэтому по закону Фарадея в обмотке статора индуцируется ЭДС. ЭДС индукции носит переменный характер и частота чередования будет пропорциональна скорости вращения ротора.
В трехфазном генераторе переменного тока три набора катушек намотаны на полюса статора с относительным электрическим расстоянием 120 градусов. Следовательно, ЭДС, индуцируемая в каждом наборе катушек, должна иметь фазовый сдвиг 120 градусов.
Синхронные двигателиКак упоминалось ранее, постоянное напряжение подается на обмотку возбуждения синхронного двигателя, а переменное напряжение подается на статор для создания крутящего момента. Крутящий момент создается из-за стремления ротора выровняться с магнитным полем, создаваемым статором.
Когда на статор подается трехфазное переменное напряжение, создается вращающееся магнитное поле. Поскольку ротор уже имеет постоянное магнитное поле, он пытается выровняться с вращающимся магнитным полем поля статора, тем самым создавая крутящий момент.
Ротор не может мгновенно набрать скорость из-за инерции. Кроме того, скорость вращения поля статора очень высока (50 Гц или 60 Гц). Следовательно, ротору становится трудно сначала набрать крутящий момент. Это делает синхронный двигатель несамозапускающимся. Двигатель должен приводиться в действие другим вспомогательным средством, близким к его синхронной скорости. На скорости, близкой к синхронной, поля ротора и статора замыкаются друг на друга, и ротор начинает вращаться с синхронной скоростью, после чего вспомогательные средства, используемые для запуска двигателя, могут быть отключены.
Еще одной особенностью синхронного двигателя является то, что при перевозбуждении он действует как конденсатор и может использоваться для компенсации реактивной мощности. Двигатель, используемый для компенсации реактивной мощности, известен как синхронный конденсатор и используется в больших силовых установках для коррекции коэффициента мощности.
Асинхронные двигатели или асинхронные двигатели Асинхронные двигатели широко используются во всех отраслях промышленности. Без всякого сомнения можно сказать, что это самая используемая электрическая машина в мире. Однофазный асинхронный двигатель можно найти в каждом доме в виде потолочных вентиляторов, насосов и т. д. Самым большим преимуществом асинхронных двигателей является то, что он не требует отдельного источника питания для ротора.
Без всякого сомнения можно сказать, что это самая используемая электрическая машина в мире. Однофазный асинхронный двигатель можно найти в каждом доме в виде потолочных вентиляторов, насосов и т. д. Самым большим преимуществом асинхронных двигателей является то, что он не требует отдельного источника питания для ротора.
Асинхронные двигатели имеют трехфазную обмотку на статоре, аналогичную обмотке синхронных машин. При подаче на обмотки статора трехфазного напряжения образуется вращающееся магнитное поле. Это переменное магнитное поле контактирует с проводниками ротора и индуцирует в нем ЭДС.
Концы обмотки ротора закорочены так, что по ней протекает ток, пропорциональный ЭДС индукции. Из-за протекания тока создается другое магнитное поле, вращающееся в том же направлении, что и статор. Взаимодействие между этими двумя магнитными полями создает крутящий момент, который стремится вращать двигатель в направлении вращения магнитного поля статора. Асинхронные двигатели являются самозапускающимися двигателями.
Асинхронные двигатели являются самозапускающимися двигателями.
Скорость ротора всегда меньше синхронной скорости приложенного напряжения статора. Поэтому эти двигатели известны как асинхронные двигатели. Разница между синхронной скоростью и фактической скоростью вращения ротора на единицу называется скольжением.
Асинхронный двигатель с короткозамкнутым роторомВ асинхронных двигателях возможны два типа конструкции ротора. Первый представляет собой ротор с обмоткой, а второй — ротор с короткозамкнутым ротором. Ротор состоит из пазов для размещения проводников. Намотанный ротор состоит из трех фазных обмоток, как и у статора в этих пазах. Один конец каждой фазы закорочен, образуя соединение звездой или звездой, а другие концы подведены к контактному кольцу, прикрепленному к валу.
Угольные щетки используются для вбивания токосъемных колец во внешнюю клеммную коробку. К ротору можно добавить внешнее сопротивление для ограничения пускового тока.
Роторы с короткозамкнутым ротором состоят из сплошных стержней из проводящего материала, помещенных в пазы ротора.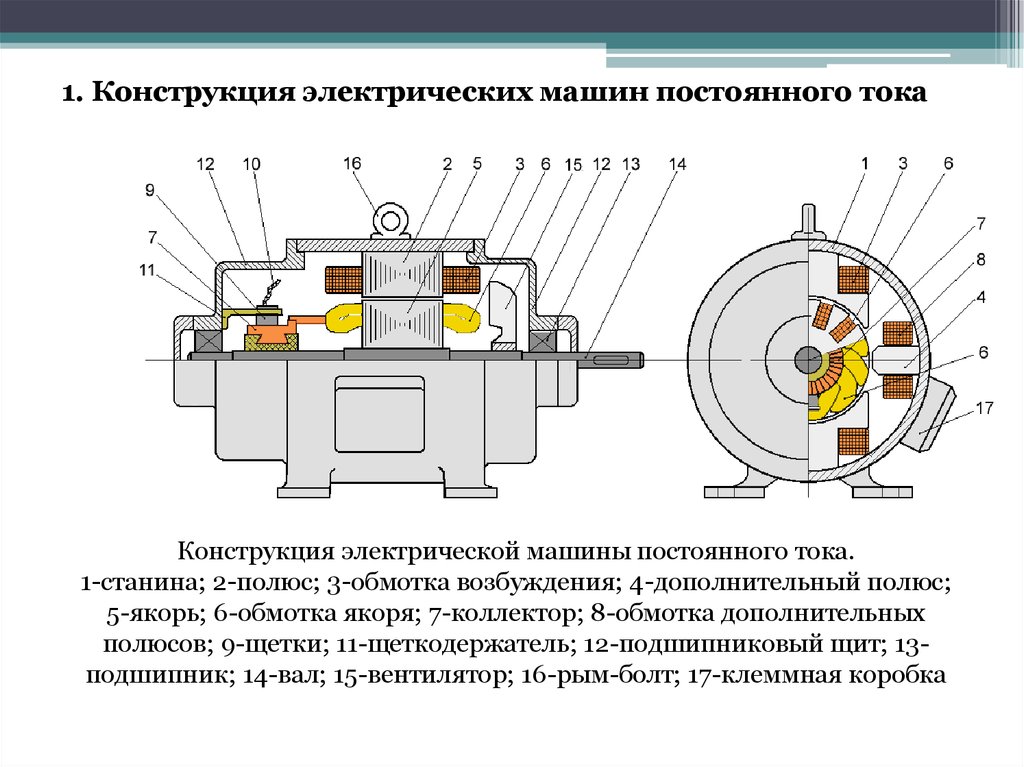 Эти проводники закорочены на обоих концах. Этот тип роторов не имеет внешних электрических соединений. Также двигатели с короткозамкнутым ротором имеют меньший пусковой момент, чем роторы с обмоткой.
Эти проводники закорочены на обоих концах. Этот тип роторов не имеет внешних электрических соединений. Также двигатели с короткозамкнутым ротором имеют меньший пусковой момент, чем роторы с обмоткой.
Когда асинхронный двигатель, вращающийся с определенной скоростью, вынужден вращаться выше своей синхронной скорости за счет приложения внешней механической энергии, он действует как генератор. Такие машины известны как асинхронные генераторы. Они находят свое применение в ветроэнергетике и малых гидроэлектростанциях.
Двигатели постоянного тока с постоянными магнитами Двигатели постоянного тока с постоянными магнитами состоят из радиально расположенных постоянных магнитов на статоре. Ротор состоит из обмотки постоянного тока, соединенной с коммутатором. Принцип работы двигателей постоянного тока такой же, как у параллельных двигателей постоянного тока, за исключением того, что они не требуют отдельного питания возбуждения.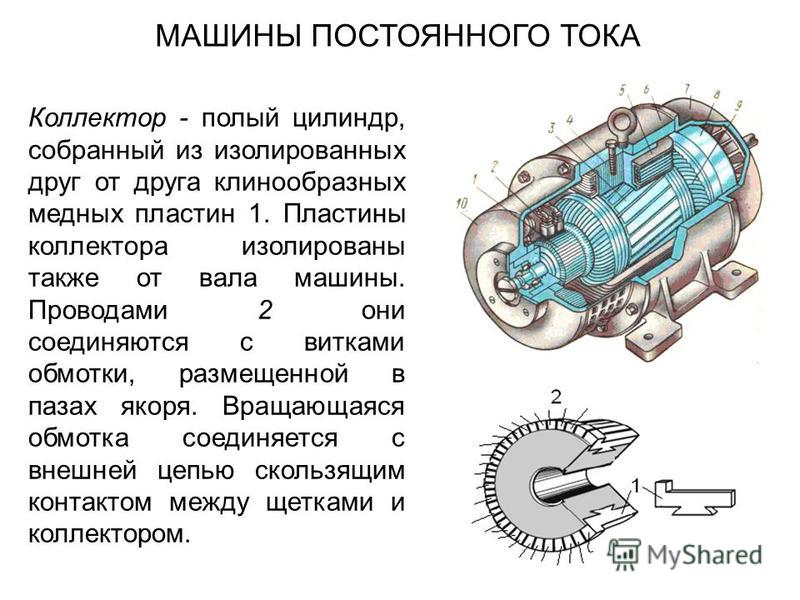 Отсутствие внешнего питания снижает потери мощности, повышает эффективность и уменьшает размер по сравнению с обычными двигателями постоянного тока того же размера.
Отсутствие внешнего питания снижает потери мощности, повышает эффективность и уменьшает размер по сравнению с обычными двигателями постоянного тока того же размера.
Бесщеточный двигатель постоянного тока имеет набор постоянных магнитов на роторе и полупроводник, включенный на статоре. Полупроводниковые переключатели преобразуют входной источник постоянного тока в пульсирующий постоянный ток для создания максимального крутящего момента при заданной скорости.
В этих двигателях положение ротора и статора перевернуто. Поле присутствует в роторе, а якорь присутствует в начале. Датчики используются для позиционирования ротора, и в зависимости от его положения полупроводниковые переключатели включаются и выключаются для выполнения требований скорости и крутящего момента. Эти двигатели дороже, чем обычные двигатели постоянного тока, требуют меньшего обслуживания и имеют более длительный срок службы, чем обычные двигатели постоянного тока.
Серводвигатели используются для точного управления положением. Это бесщеточные двигатели постоянного тока в сочетании с датчиками положения, такими как энкодеры и потенциометры. Серводвигатели используются для регулирования положения с обратной связью. Они находят свое применение в морской навигации, автоматических станках, летательных аппаратах, роботах, регуляторах скорости и т. д.
Шаговые двигателиШаговые двигатели представляют собой двигатели с импульсным приводом, используемые для управления положением. Эти двигатели могут перемещаться на определенный угол для каждой применяемой фазы управления. Они не требуют датчиков положения.
Принцип работы электродвигателя
В настоящее время электродвигатели можно найти в жизни каждого, поскольку они преобразуют электрическую энергию в механическую или кинетическую энергию. Эклектичные двигатели доступны в электромобилях (EV), вентиляторах, часах, миксерах, кофемолках, стиральных машинах и многих других устройствах.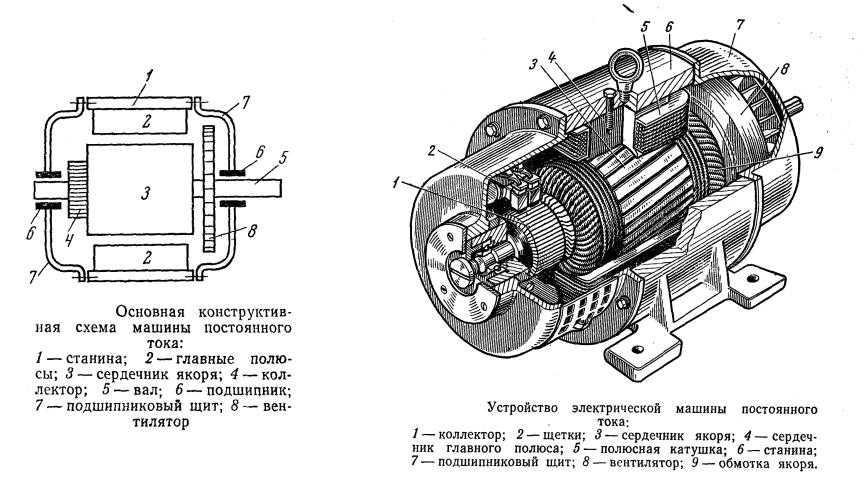 Следовательно, знание принципов работы двигателя может помочь каждому более эффективно использовать моторное оборудование. В этой статье обсуждается принцип работы электродвигателя . Затем представлены различные распространенные типы электродвигателей, включая двигатели постоянного тока, асинхронные двигатели и, наконец, синхронные двигатели.
Следовательно, знание принципов работы двигателя может помочь каждому более эффективно использовать моторное оборудование. В этой статье обсуждается принцип работы электродвигателя . Затем представлены различные распространенные типы электродвигателей, включая двигатели постоянного тока, асинхронные двигатели и, наконец, синхронные двигатели.
Электродвигатели работают на основе магнитного поля. Магнитное поле может создаваться магнитом или обмотками вокруг магнитного сердечника. Чтобы начать теорию, объясняется магнитная сила провода с током, который подвергается воздействию магнитного поля. Магнит создает магнитное поле между полюсами N и S, как показано на рисунке 1. Линии магнитного поля выходят из полюса N и входят в полюс S. Это магнитное поле является постоянным, и в магнитном поле нет колебаний, которые могут выглядеть как постоянное магнитное поле.
Рисунок 1: Магнитное поле между северным и южным полюсами магнита
Когда проводник с током входит в магнитное поле, к проводу прикладывается магнитная сила, которая заставляет провод двигаться. Величина силы зависит от некоторых параметров, которые обсуждаются в этой статье. Первым параметром, влияющим на магнитную силу, является ток, протекающий по проводу. Если ток через ток равен нулю, силы на провод не будет, а сила имеет прямую связь с током. Следовательно, можно написать следующее уравнение.
Величина силы зависит от некоторых параметров, которые обсуждаются в этой статье. Первым параметром, влияющим на магнитную силу, является ток, протекающий по проводу. Если ток через ток равен нулю, силы на провод не будет, а сила имеет прямую связь с током. Следовательно, можно написать следующее уравнение.
(1)
где F — магнитная сила, а I — сила тока в проводе. Еще одним параметром является длина провода, который видит магнитное поле. Зависимость между магнитной силой и длиной оголенного провода также является прямой и может быть записана как:
(2)
, где l — длина провода. Последним параметром является напряженность магнитного поля, которая имеет прямую зависимость от магнитной силы как:
(3)
Эти три параметра определяют максимальное значение магнитной силы, которое возникает, когда магнитное поле перпендикулярно проводу. Таким образом, любое отклонение от перпендикулярного положения уменьшает величину силы, прикладываемой к проволоке. Это означает, что магнитная сила на рисунке 2 не достигает своего максимального значения из-за угла между магнитным полем и током в проводнике.
Это означает, что магнитная сила на рисунке 2 не достигает своего максимального значения из-за угла между магнитным полем и током в проводнике.
Рисунок 2: Проводник с током среди магнитного поля, создаваемого магнитом
Учитывая все параметры, магнитная сила может быть рассчитана по данному уравнению.
(4)
Теперь вместо одного проводника можно рассматривать петлю между полюсами. Петля может быть любой формы, но для лучшего понимания предполагается, что петля представляет собой прямоугольник, как показано на рисунке 3. В этой ситуации каждая сторона петли несет ток и испытывает магнитную силу. Направление силы можно получить по правилу левой руки.
Рисунок 3. Близкий путь проводника в магнитном поле, создаваемом магнитом
текущее направление, и все эти пальцы перпендикулярны друг другу. Согласно уравнению 4, магнитная сила равна нулю, когда несущий ток параллелен магнитному полю. Таким образом, магнитная сила BC и AD равна нулю. В этом состоянии только AB и CD испытывают магнитную силу. Если применить правило левой руки к путям AB и CD, магнитная сила для пути AB будет направлена вверх, а для пути CD направление силы будет направлено вниз. Эти две противоположные силы вращают петлю, но она не может завершить свое вращение, потому что направление тока в петле постоянно. Это означает, что устойчивое положение петли — это когда петля перпендикулярна магнитному полю. В этом положении направленная вверх и вниз сила нейтрализует друг друга, и проволочная петля не может двигаться. Чтобы решить эту проблему, направление тока в петле должно соблюдаться в каждом полуобороте, чтобы позволить проволочной петле вращаться. Более того, инерция поможет петле продолжить свое вращение и пройти устойчивое положение.
Таким образом, магнитная сила BC и AD равна нулю. В этом состоянии только AB и CD испытывают магнитную силу. Если применить правило левой руки к путям AB и CD, магнитная сила для пути AB будет направлена вверх, а для пути CD направление силы будет направлено вниз. Эти две противоположные силы вращают петлю, но она не может завершить свое вращение, потому что направление тока в петле постоянно. Это означает, что устойчивое положение петли — это когда петля перпендикулярна магнитному полю. В этом положении направленная вверх и вниз сила нейтрализует друг друга, и проволочная петля не может двигаться. Чтобы решить эту проблему, направление тока в петле должно соблюдаться в каждом полуобороте, чтобы позволить проволочной петле вращаться. Более того, инерция поможет петле продолжить свое вращение и пройти устойчивое положение.
Рис. 4. Коллектор и щетка для изменения направления тока в контуре на противоположное
Для достижения этой цели в схему необходимо добавить угольные щетки и коммутаторы. Поскольку провода батареи не могут вращаться вместе с петлей, две щетки действуют как мост для контакта петли с батареей. Кроме того, коммутаторы изменяют направление тока в петле, когда петля вращается в магнитном поле. Эти принципы относятся к двигателю постоянного тока, поскольку источник постоянного тока подключен к вращающейся части двигателя. Двигатели обычно имеют статическую часть, называемую статором, и подвижную часть, а именно ротор. Обе части состоят из магнитопровода и обмоток. В двигателе постоянного тока в статорной части используется магнит. Однако постоянное магнитное поле можно создать, обмотав провода вокруг статора и подключив клеммы к источнику постоянного напряжения. Кроме того, к коммутаторам подключено множество проволочных петель, чтобы увеличить мощность и помочь двигателю вращаться быстрее. В двигателях постоянного тока воздушный зазор между статором и ротором равномерный.
Поскольку провода батареи не могут вращаться вместе с петлей, две щетки действуют как мост для контакта петли с батареей. Кроме того, коммутаторы изменяют направление тока в петле, когда петля вращается в магнитном поле. Эти принципы относятся к двигателю постоянного тока, поскольку источник постоянного тока подключен к вращающейся части двигателя. Двигатели обычно имеют статическую часть, называемую статором, и подвижную часть, а именно ротор. Обе части состоят из магнитопровода и обмоток. В двигателе постоянного тока в статорной части используется магнит. Однако постоянное магнитное поле можно создать, обмотав провода вокруг статора и подключив клеммы к источнику постоянного напряжения. Кроме того, к коммутаторам подключено множество проволочных петель, чтобы увеличить мощность и помочь двигателю вращаться быстрее. В двигателях постоянного тока воздушный зазор между статором и ротором равномерный.
Теория двигателя переменного тока такая же. Значит, магнитное поле необходимо, и обмотки ротора вынуждены вращаться. Однако в двигателях переменного тока обмотки статора подключены к источнику переменного напряжения, и магниты не могут использоваться для статоров, поскольку магнитное поле, создаваемое магнитом, постоянно. Двигатели переменного тока подразделяются на две основные группы, включая асинхронные двигатели и синхронные двигатели, которые будут обсуждаться в следующих частях. Большинство двигателей в промышленности представляют собой трехфазные асинхронные двигатели, которые используются в вентиляторах, насосах и т. д. Однако однофазные асинхронные двигатели используются в бытовой технике, такой как холодильники, миксеры и т. д.
Однако в двигателях переменного тока обмотки статора подключены к источнику переменного напряжения, и магниты не могут использоваться для статоров, поскольку магнитное поле, создаваемое магнитом, постоянно. Двигатели переменного тока подразделяются на две основные группы, включая асинхронные двигатели и синхронные двигатели, которые будут обсуждаться в следующих частях. Большинство двигателей в промышленности представляют собой трехфазные асинхронные двигатели, которые используются в вентиляторах, насосах и т. д. Однако однофазные асинхронные двигатели используются в бытовой технике, такой как холодильники, миксеры и т. д.
В асинхронных двигателях воздушный зазор неравномерный, сердечник статора ламинирован из-за потерь на вихри, на внешней поверхности прорезаны пазы. Трехфазные обмотки вставлены в пазы статора для создания магнитного поля переменного тока в воздушном зазоре. Существует два типа обмотки ротора, которые называются типами с короткозамкнутым ротором и фазным ротором. В асинхронных двигателях нет токонесущих обмоток, потому что вращающееся магнитное поле переменного тока изменяется со временем, и его изменение заставляет обмотки ротора вращаться в направлении магнитного поля. Магнитное поле переменного тока, создаваемое обмотками статора, вращается в воздушном зазоре с синхронной скоростью, но скорость вращения ротора меньше скорости поля в асинхронном двигателе.
В асинхронных двигателях нет токонесущих обмоток, потому что вращающееся магнитное поле переменного тока изменяется со временем, и его изменение заставляет обмотки ротора вращаться в направлении магнитного поля. Магнитное поле переменного тока, создаваемое обмотками статора, вращается в воздушном зазоре с синхронной скоростью, но скорость вращения ротора меньше скорости поля в асинхронном двигателе.
В отличие от асинхронного двигателя синхронный двигатель может вращаться с постоянной скоростью в установившемся режиме. Следовательно, синхронные двигатели можно использовать там, где важна постоянная скорость, например, электрические часы, таймеры, или многие из них в больших масштабах можно использовать в качестве насосов. Однако синхронные машины используются в качестве генератора, а не двигателя. На электростанциях есть много синхронных генераторов, но синхронные двигатели имеют ограниченное применение. Структура статора синхронного двигателя аналогична асинхронным двигателям, но по обмотке ротора протекает постоянный ток.
Электродвигатели используются во многих отраслях промышленности. Например, электропоезда работают с двигателями постоянного тока и асинхронными двигателями. Кроме того, в электромобилях используются разные типы двигателей. В прошлом для этой цели широко использовались двигатели серии постоянного тока. В наши дни бесщеточный двигатель постоянного тока (BLDC) или синхронный двигатель с постоянными магнитами (PMSM) используются вместе с асинхронными двигателями. Двигатели даже используются в бытовой технике, такой как кофемолки, миксеры, блендеры, электрические зубные щетки и т. д. Другими распространенными областями применения являются компрессоры, корабли и лифты. В следующем разделе всесторонне представлены электродвигатели Tesla EV.
Tesla как пионер в области электромобилей использует различные типы электродвигателей для достижения более высокой эффективности и удовлетворения потребностей пользователей. Асинхронные двигатели в основном используются в электромобилях, но Tesla представляет новый двигатель для своих новых моделей. В этой статье определены принципы работы асинхронного двигателя, в котором ротор с короткозамкнутым ротором и статор подключены к источнику переменного напряжения. Поскольку основным источником энергии в электромобилях являются батареи, постоянное напряжение батареи преобразуется в переменное напряжение для питания асинхронного двигателя. Асинхронные двигатели эффективны, но от трех до четырех процентов энергии теряется в стержнях несущего винта при длительном движении на крейсерской скорости. Еще один параметр — пусковой крутящий момент, который необходимо повышать в электромобилях. Следовательно, двигатель должен быть улучшен, исходя из этой потребности. Ротор с короткозамкнутым ротором можно заменить постоянным магнитом вокруг сплошного железного цилиндра для создания постоянного магнитного поля в воздушном зазоре. Эта конструкция устраняет потери ротора в предыдущих двигателях, поскольку не требуется индуктивного тока, что повышает эффективность двигателя, и, кроме того, он имеет лучший пусковой момент по сравнению с асинхронным двигателем.
В этой статье определены принципы работы асинхронного двигателя, в котором ротор с короткозамкнутым ротором и статор подключены к источнику переменного напряжения. Поскольку основным источником энергии в электромобилях являются батареи, постоянное напряжение батареи преобразуется в переменное напряжение для питания асинхронного двигателя. Асинхронные двигатели эффективны, но от трех до четырех процентов энергии теряется в стержнях несущего винта при длительном движении на крейсерской скорости. Еще один параметр — пусковой крутящий момент, который необходимо повышать в электромобилях. Следовательно, двигатель должен быть улучшен, исходя из этой потребности. Ротор с короткозамкнутым ротором можно заменить постоянным магнитом вокруг сплошного железного цилиндра для создания постоянного магнитного поля в воздушном зазоре. Эта конструкция устраняет потери ротора в предыдущих двигателях, поскольку не требуется индуктивного тока, что повышает эффективность двигателя, и, кроме того, он имеет лучший пусковой момент по сравнению с асинхронным двигателем. Кроме того, ротор с постоянными магнитами работает как синхронный двигатель из-за постоянного магнитного поля, которое позволяет двигателю вращаться с синхронной скоростью. Однако двигатели с постоянными магнитами имеют некоторые ограничения. Они не могут работать на высокой скорости, потому что постоянный магнит создает противо-ЭДС в обмотках статора и значительно снижает его производительность. Кроме того, сильные магниты приводят к потерям магнитных вихревых токов, что увеличивает нагрев двигателя. Для повышения производительности в электромобилях могут использоваться синхронные реактивные двигатели. В этом типе двигателя внутри ротора созданы пазы. Поскольку ротор стремится к низкому магнитному сопротивлению, он сохраняет свое положение с низким магнитным сопротивлением и вращается вместе с магнитным полем. Эта конструкция приемлема для высокоскоростных приложений и не имеет обратной ЭДС. Новейший тип двигателя, который Tesla использует в своих электромобилях, представляет собой комбинацию двигателей с постоянными магнитами и реактивных двигателей, размещая их в слотах реактивных двигателей.
Кроме того, ротор с постоянными магнитами работает как синхронный двигатель из-за постоянного магнитного поля, которое позволяет двигателю вращаться с синхронной скоростью. Однако двигатели с постоянными магнитами имеют некоторые ограничения. Они не могут работать на высокой скорости, потому что постоянный магнит создает противо-ЭДС в обмотках статора и значительно снижает его производительность. Кроме того, сильные магниты приводят к потерям магнитных вихревых токов, что увеличивает нагрев двигателя. Для повышения производительности в электромобилях могут использоваться синхронные реактивные двигатели. В этом типе двигателя внутри ротора созданы пазы. Поскольку ротор стремится к низкому магнитному сопротивлению, он сохраняет свое положение с низким магнитным сопротивлением и вращается вместе с магнитным полем. Эта конструкция приемлема для высокоскоростных приложений и не имеет обратной ЭДС. Новейший тип двигателя, который Tesla использует в своих электромобилях, представляет собой комбинацию двигателей с постоянными магнитами и реактивных двигателей, размещая их в слотах реактивных двигателей. Таким образом, двигатель может эффективно работать на любой скорости.
Таким образом, двигатель может эффективно работать на любой скорости.
Принцип работы электродвигателя — HiSoUR История культуры — Hi So You Are
Электродвигатель — это электромеханический преобразователь (электрическая машина), который преобразует электрическую энергию в механическую. В обычных электродвигателях катушки токонесущих проводников генерируют магнитные поля, силы взаимного притяжения и отталкивания которых реализуются в движении. Таким образом, электродвигатель является аналогом очень похожего по конструкции генератора, который преобразует мощность двигателя в электрическую энергию. Электродвигатели обычно генерируют вращательные движения, но их также можно использовать для создания поступательных движений (линейный привод). Электродвигатели используются для привода многих устройств, машин и транспортных средств.
Принцип действия
Электродвигатели — это устройства, преобразующие электрическую энергию в механическую. Средством такого преобразования энергии в электродвигателях является магнитное поле. Существуют различные типы электродвигателей, и каждый тип имеет различные компоненты, структура которых определяет взаимодействие электрических и магнитных потоков, вызывающих силу или крутящий момент двигателя.
Существуют различные типы электродвигателей, и каждый тип имеет различные компоненты, структура которых определяет взаимодействие электрических и магнитных потоков, вызывающих силу или крутящий момент двигателя.
Фундаментальный принцип заключается в том, что закон Лоренца описывает, как сила возникает в результате взаимодействия точечного электрического заряда q в электрическом и магнитном полях:
где:
q : точечный электрический заряд
E : электрическое поле
v : скорость частицы
B : плотность магнитного поля
В случае чисто электрического поля выражение уравнения сводится к:
сила в этом случае определяется только зарядом q и электрическим полем Е. Именно кулоновская сила действует вдоль проводника, порождающего электрический поток, например в катушках статора асинхронных машин или в роторе электродвигателей. двигатели постоянного тока.
В случае чисто магнитного поля:
Сила определяется зарядом, плотностью магнитного поля B и скоростью груза v. Эта сила перпендикулярна магнитному полю и направлению скорости Загрузка. Обычно в движении находится много грузов, поэтому удобно переписать выражение через плотность заряда Fv (сила на единицу объема):
Эта сила перпендикулярна магнитному полю и направлению скорости Загрузка. Обычно в движении находится много грузов, поэтому удобно переписать выражение через плотность заряда Fv (сила на единицу объема):
Произведение, известное как плотность тока Дж (ампер на квадратный метр):
Тогда полученное выражение описывает силу, возникающую при взаимодействии тока с магнитным полем:
Это основной принцип, который объясняет, как силы возникают в электромеханических системах, таких как электродвигатели. Однако полное описание каждого типа электродвигателя зависит от его компонентов и конструкции.
Линейный двигатель
Линейный двигатель — это, по сути, любой электродвигатель, который был «развернут» таким образом, что вместо создания крутящего момента (вращения) он создает прямолинейную силу по всей своей длине.
Линейные двигатели чаще всего представляют собой асинхронные или шаговые двигатели. Линейные двигатели обычно используются во многих американских горках, где быстрое движение безмоторного вагона контролируется рельсом. Они также используются в поездах на магнитной подвеске, где поезд «летает» над землей. В меньшем масштабе перьевой плоттер HP 7225A эпохи 1978 года использовал два линейных шаговых двигателя для перемещения пера по осям X и Y.
Они также используются в поездах на магнитной подвеске, где поезд «летает» над землей. В меньшем масштабе перьевой плоттер HP 7225A эпохи 1978 года использовал два линейных шаговых двигателя для перемещения пера по осям X и Y.
Электромагнетизм
Сила и крутящий момент
Фундаментальная цель подавляющего большинства электродвигателей в мире состоит в электромагнитном индуцировании относительного движения в воздушном зазоре между статором и ротором для создания полезного крутящего момента или линейной силы.
В соответствии с законом силы Лоренца сила проводника обмотки может быть определена просто как:
или, в более общем случае, для работы с проводниками любой геометрии:
В наиболее общих подходах к расчету сил в двигателях используются тензоры.
Мощность
Где об/мин — это частота вращения вала, а T — крутящий момент, выходная механическая мощность двигателя Pem определяется формулой,
в британских единицах, где T выражается в футо-фунтах,
(в лошадиных силах) и
в единицах СИ с угловая скорость вала, выраженная в радианах в секунду, и T, выраженная в ньютон-метрах,
(ватт).
Для линейного двигателя с силой F, выраженной в ньютонах, и скоростью v, выраженной в метрах в секунду,
(ватт).
В асинхронном или асинхронном двигателе связь между скоростью двигателя и мощностью воздушного зазора без учета скин-эффекта определяется следующим образом:
, где
Rr – сопротивление ротора в роторе
с – проскальзывание двигателя; т. е. разница между синхронной скоростью и скоростью скольжения, которая обеспечивает относительное движение, необходимое для индукции тока в роторе.
Противоэдс
Поскольку обмотки якоря постоянного или универсального двигателя движутся в магнитном поле, в них возникает наведенное напряжение. Это напряжение имеет тенденцию противодействовать напряжению питания двигателя и поэтому называется «противоэлектродвижущей силой (ЭДС)». Напряжение пропорционально скорости вращения двигателя. Противо-ЭДС двигателя плюс падение напряжения на внутреннем сопротивлении обмотки и щетках должны равняться напряжению на щетках. Это обеспечивает фундаментальный механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; в результате получается более низкая противо-ЭДС, и от источника питания потребляется больше тока. Этот увеличенный ток обеспечивает дополнительный крутящий момент для балансировки новой нагрузки.
Это обеспечивает фундаментальный механизм регулирования скорости в двигателе постоянного тока. Если механическая нагрузка увеличивается, двигатель замедляется; в результате получается более низкая противо-ЭДС, и от источника питания потребляется больше тока. Этот увеличенный ток обеспечивает дополнительный крутящий момент для балансировки новой нагрузки.
В машинах переменного тока иногда полезно учитывать наличие внутри машины источника противо-ЭДС; например, это вызывает особую озабоченность при близком регулировании скорости асинхронных двигателей на частотно-регулируемых приводах.
Потери
Потери двигателя в основном связаны с резистивными потерями в обмотках, потерями в сердечнике и механическими потерями в подшипниках, а также имеют место аэродинамические потери, особенно при наличии охлаждающих вентиляторов.
Потери также возникают при коммутации, искровых механических коммутаторах и электронных коммутаторах, а также рассеивают тепло.
КПД
Для расчета КПД двигателя механическая выходная мощность делится на входную электрическую мощность:
,
где КПД преобразования энергии, электрическая входная мощность и механическая выходная мощность:
где входная мощность напряжение, входной ток, T выходной крутящий момент и выходная угловая скорость.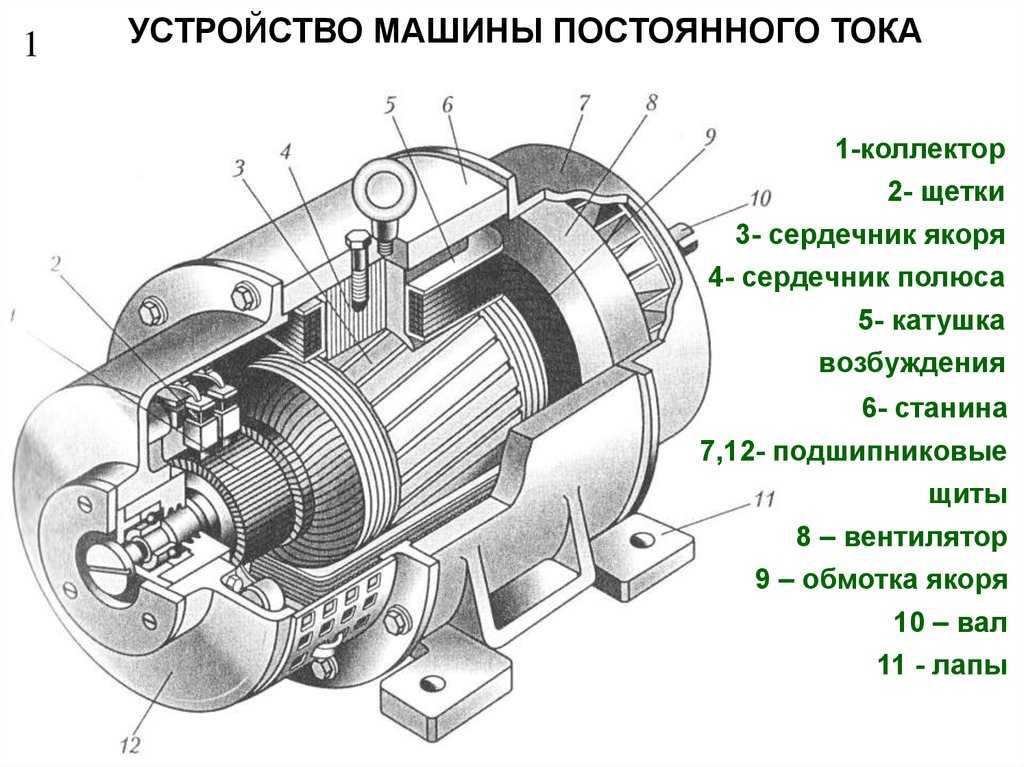 Аналитически можно вывести точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента срыва.
Аналитически можно вывести точку максимальной эффективности. Обычно он составляет менее 1/2 крутящего момента срыва.
Различные регулирующие органы во многих странах приняли и внедрили законодательство, поощряющее производство и использование электродвигателей с более высоким КПД.
Коэффициент качества
Эрик Лейтуэйт предложил показатель для определения «качества» электродвигателя: и электрической цепи
— длины магнитной и электрической цепи
— магнитная проницаемость сердечника
— угловая частота двигателя
Из этого он показал, что наиболее эффективные двигатели, вероятно, имеют относительно большие магнитные полюса. Однако уравнение напрямую относится только к двигателям без постоянных магнитов.
Рабочие параметры
Крутящий момент типов двигателей
Все электромагнитные двигатели, включая упомянутые здесь типы, получают крутящий момент из векторного произведения взаимодействующих полей. Для расчета крутящего момента необходимо знать поля в воздушном зазоре. После того, как они будут установлены с помощью математического анализа с использованием FEA или других инструментов, крутящий момент может быть рассчитан как интеграл всех векторов силы, умноженный на радиус каждого вектора. Ток, протекающий по обмотке, создает поля, а для двигателя, использующего магнитный материал, поле не линейно пропорционально току. Это усложняет вычисления, но компьютер может выполнить многие необходимые расчеты.
После того, как они будут установлены с помощью математического анализа с использованием FEA или других инструментов, крутящий момент может быть рассчитан как интеграл всех векторов силы, умноженный на радиус каждого вектора. Ток, протекающий по обмотке, создает поля, а для двигателя, использующего магнитный материал, поле не линейно пропорционально току. Это усложняет вычисления, но компьютер может выполнить многие необходимые расчеты.
Как только это будет сделано, соотношение тока к крутящему моменту можно использовать в качестве полезного параметра для выбора двигателя. Максимальный крутящий момент для двигателя будет зависеть от максимального тока, хотя обычно его можно использовать только до тех пор, пока тепловые соображения не станут приоритетными.
При оптимальном расчете в пределах заданного ограничения насыщения сердечника и заданного активного тока (т. е. тока крутящего момента), напряжения, числа пар полюсов, частоты возбуждения (т. е. синхронной скорости) и плотности потока в воздушном зазоре все категории электродвигатели или генераторы будут демонстрировать практически одинаковый максимальный непрерывный крутящий момент на валу (т. Е. Рабочий крутящий момент) в пределах заданной площади воздушного зазора с пазами обмотки и глубиной заднего сердечника, которая определяет физический размер электромагнитного сердечника. В некоторых приложениях требуются всплески крутящего момента, превышающие максимальный рабочий крутящий момент, например, короткие всплески крутящего момента для ускорения электромобиля с места. Всегда ограниченная насыщением магнитного сердечника или безопасным повышением рабочей температуры и напряжения, способность к скачкам крутящего момента сверх максимального рабочего крутящего момента значительно различается между категориями электродвигателей или генераторов.
Е. Рабочий крутящий момент) в пределах заданной площади воздушного зазора с пазами обмотки и глубиной заднего сердечника, которая определяет физический размер электромагнитного сердечника. В некоторых приложениях требуются всплески крутящего момента, превышающие максимальный рабочий крутящий момент, например, короткие всплески крутящего момента для ускорения электромобиля с места. Всегда ограниченная насыщением магнитного сердечника или безопасным повышением рабочей температуры и напряжения, способность к скачкам крутящего момента сверх максимального рабочего крутящего момента значительно различается между категориями электродвигателей или генераторов.
Способность к вспышкам крутящего момента не следует путать со способностью ослабления поля. Ослабление поля позволяет электрической машине работать за пределами расчетной частоты возбуждения. Ослабление поля выполняется, когда максимальная скорость не может быть достигнута за счет увеличения приложенного напряжения. Это относится только к двигателям с управляемыми по току полями и поэтому не может быть достигнуто с двигателями с постоянными магнитами.
Электрические машины без топологии цепи трансформатора, такие как WRSM или PMSM, не могут реализовать всплески крутящего момента, превышающие максимально расчетный крутящий момент, без насыщения магнитного сердечника и превращения любого увеличения тока в бесполезное. Кроме того, узел постоянного магнита СДПМ может быть непоправимо поврежден, если будут предприняты попытки броска крутящего момента, превышающего максимальный номинальный рабочий крутящий момент.
Электрические машины с топологией схемы трансформатора, такие как асинхронные машины, асинхронные электрические машины с двойным питанием и асинхронные или синхронные машины с двойным питанием с фазным ротором (WRDF), демонстрируют очень высокие всплески крутящего момента, поскольку активный ток, индуцированный ЭДС по обе стороны трансформатора противостоят друг другу и, таким образом, не вносят никакого вклада в плотность потока магнитного сердечника, связанного с трансформатором, что в противном случае привело бы к насыщению сердечника.
Электрические машины, работающие на индукционных или асинхронных принципах, закорачивают один порт цепи трансформатора, в результате чего реактивное сопротивление цепи трансформатора становится преобладающим по мере увеличения скольжения, что ограничивает величину активного (т. е. действительного) тока . Тем не менее, возможны всплески крутящего момента, в два-три раза превышающие максимальный расчетный крутящий момент.
Бесщеточная синхронная машина с двойным питанием и фазным ротором (BWRSDF) — единственная электрическая машина с действительно двухпортовой топологией схемы трансформатора (т. е. оба порта возбуждаются независимо, без короткозамкнутого порта). Известно, что топология схемы трансформатора с двумя портами нестабильна и требует сборки многофазного токосъемного кольца и щетки для передачи ограниченной мощности на набор обмоток ротора. Если бы были доступны прецизионные средства для мгновенного управления углом крутящего момента и скольжением для синхронной работы во время работы двигателя или генерации, одновременно обеспечивая бесщеточную мощность для набора обмоток ротора, активный ток машины BWRSDF не зависел бы от реактивного сопротивления цепи трансформатора и возможны всплески крутящего момента, значительно превышающие максимальный рабочий крутящий момент и выходящие далеко за пределы практических возможностей любого другого типа электрической машины. Были рассчитаны скачки крутящего момента, превышающие восьмикратный рабочий крутящий момент.
Были рассчитаны скачки крутящего момента, превышающие восьмикратный рабочий крутящий момент.
Непрерывная плотность крутящего момента
Непрерывная плотность крутящего момента обычных электрических машин определяется размером площади воздушного зазора и глубиной сердечника, которые определяются номинальной мощностью набора обмоток якоря, скоростью машины , и достижимая плотность потока в воздушном зазоре до насыщения сердечника. Несмотря на высокую коэрцитивную силу неодимовых или самариево-кобальтовых постоянных магнитов, плотность непрерывного крутящего момента практически одинакова среди электрических машин с оптимально спроектированными наборами обмоток якоря. Постоянная плотность крутящего момента зависит от способа охлаждения и допустимого периода работы до разрушения из-за перегрева обмоток или повреждения постоянного магнита.
Другие источники утверждают, что различные топологии электронных машин имеют разную плотность крутящего момента. Один источник показывает следующее:
| Тип электрической машины | Удельная плотность крутящего момента (Нм/кг) |
|---|---|
| SPM — бесщеточный, переменный ток, проводимость тока 180° | 1,0 |
| SPM — бесщеточный, переменный ток, проводимость тока 120° | 0,9-1,15 |
| АД, асинхронная машина | 0,7-1,0 |
| IPM, внутренняя машина с постоянными магнитами | 0,6-0,8 |
| VRM, рефлекторная машина с двойной явностью | 0,7-1,0 |
где — удельная плотность крутящего момента приведена к 1,0 для СЗМ — бесщеточный переменный ток, проводимость тока 180°, СЗМ — машина с поверхностными постоянными магнитами.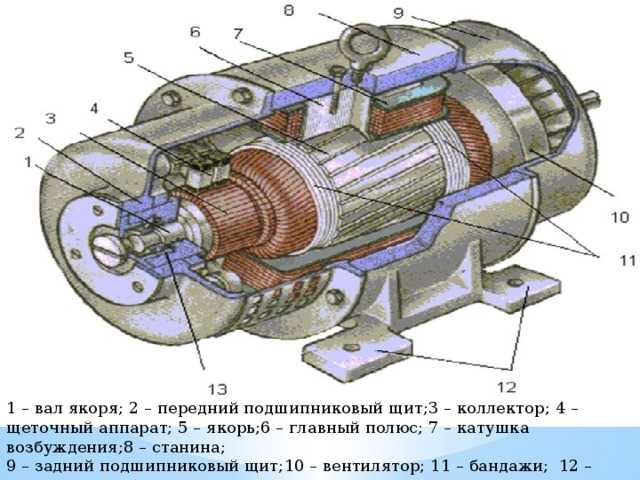
Плотность крутящего момента примерно в четыре раза больше у электродвигателей с жидкостным охлаждением по сравнению с двигателями с воздушным охлаждением.
Источник, сравнивающий двигатели постоянного тока (DC), асинхронные двигатели (IM), синхронные двигатели с постоянными магнитами (PMSM) и вентильные реактивные двигатели (SRM), показал:
| Характеристика | постоянный ток | ИМ | ПСММ | СРМ |
|---|---|---|---|---|
| Плотность крутящего момента | 3 | 3,5 | 5 | 4 |
| Плотность мощности | 3 | 4 | 5 | 3,5 |
Другой источник отмечает, что синхронные машины с постоянными магнитами мощностью до 1 МВт имеют значительно более высокую плотность крутящего момента, чем асинхронные машины.
Непрерывная удельная мощность
Непрерывная удельная мощность определяется произведением непрерывной плотности крутящего момента и диапазона скоростей постоянного крутящего момента электрической машины.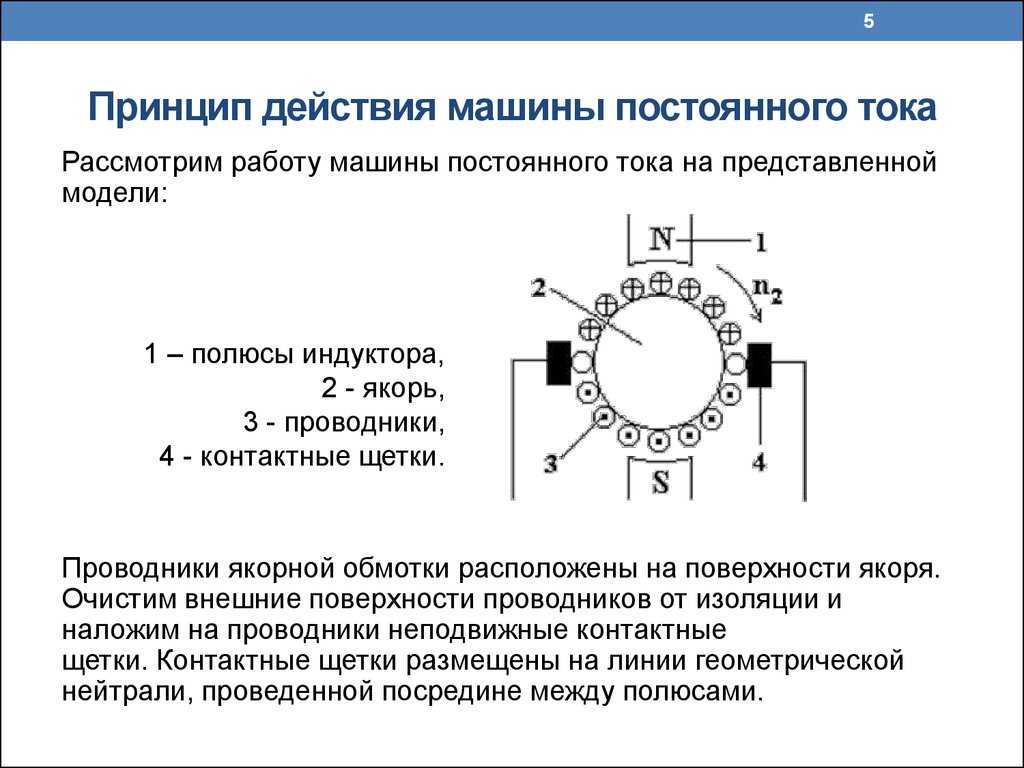
Специальные магнитные двигатели
Вращающиеся
Двигатель с ротором без железа или без сердечника
Принцип работы любого из описанных выше двигателей не требует, чтобы железные (стальные) части ротора действительно вращались. Если магнитомягкий материал ротора выполнен в виде цилиндра, то (за исключением эффекта гистерезиса) крутящий момент действует только на обмотки электромагнитов. Преимущество этого факта заключается в двигателе постоянного тока без сердечника или железа, специальной форме двигателя постоянного тока с постоянными магнитами. Эти двигатели, оптимизированные для быстрого ускорения, имеют ротор без железного сердечника. Ротор может иметь форму заполненного обмоткой цилиндра или самонесущей конструкции, состоящей только из магнитной проволоки и связующего материала. Ротор может поместиться внутри магнитов статора; магнитомягкий стационарный цилиндр внутри ротора обеспечивает обратный путь для магнитного потока статора. Во втором варианте корзина обмотки ротора окружает магниты статора. В этой конструкции ротор помещается внутри магнитно-мягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для потока.
В этой конструкции ротор помещается внутри магнитно-мягкого цилиндра, который может служить корпусом для двигателя, а также обеспечивает обратный путь для потока.
Поскольку ротор намного легче по весу (массе), чем обычный ротор, образованный из медных обмоток на стальных пластинах, ротор может ускоряться намного быстрее, часто достигая механической постоянной времени менее одной мс. Это особенно верно, если в обмотках используется алюминий, а не более тяжелая медь. Но поскольку в роторе нет металлической массы, которая действовала бы как радиатор, даже небольшие двигатели без сердечника часто должны охлаждаться принудительным воздухом. Перегрев может быть проблемой для двигателей постоянного тока без сердечника. Современное программное обеспечение, такое как Motor-CAD, может помочь повысить тепловую эффективность двигателей еще на стадии проектирования.
Среди этих типов есть типы с дисковым ротором, более подробно описанные в следующем разделе.
Вибрационный сигнал сотовых телефонов иногда генерируется крошечными цилиндрическими типами полей с постоянными магнитами, но существуют также типы дисков в форме дисков с тонким мультиполярным дисковым магнитом и преднамеренно несбалансированной конструкцией ротора из формованного пластика с двумя связанными без сердечника катушки. Металлические щетки и плоский коммутатор переключают питание на катушки ротора.
Металлические щетки и плоский коммутатор переключают питание на катушки ротора.
Соответствующие приводы с ограниченным ходом не имеют сердечника и имеют связанную катушку, расположенную между полюсами тонких постоянных магнитов с высоким магнитным потоком. Это быстрые позиционеры головок для жестких дисков («жестких дисков»). Хотя современная конструкция значительно отличается от конструкции громкоговорителей, ее до сих пор вольно (и неправильно) называют структурой «звуковой катушки», потому что некоторые более ранние головки с жесткими дисками двигались по прямым линиям и имели структуру привода, очень похожую на что из громкоговорителя.
Блинчатый или осевой роторный двигатель
Печатный якорь или блинчатый двигатель имеют обмотки в форме диска, проходящего между массивами магнитов с высоким магнитным потоком. Магниты расположены по кругу, обращенному к ротору, с промежутком между ними, образуя осевой воздушный зазор. Эта конструкция широко известна как двигатель-блинчик из-за ее плоского профиля. С момента своего появления у этой технологии было много торговых марок, таких как ServoDisc.
С момента своего появления у этой технологии было много торговых марок, таких как ServoDisc.
Печатный якорь (первоначально сформированный на печатной плате) в двигателе с печатным якорем изготовлен из перфорированных медных листов, которые ламинируются вместе с использованием передовых композитов для образования тонкого жесткого диска. Печатный якорь имеет уникальную конструкцию в мире щеточных двигателей, поскольку он не имеет отдельного кольцевого коммутатора. Щетки движутся непосредственно по поверхности арматуры, что делает всю конструкцию очень компактной.
Альтернативным методом изготовления является использование намотанной медной проволоки, уложенной плоско с центральным обычным коммутатором в форме цветка и лепестка. Обмотки обычно стабилизируются электрическими системами заливки эпоксидной смолой. Это наполненные эпоксидные смолы с умеренной смешанной вязкостью и длительным временем гелеобразования. Они выделяются низкой усадкой и низким экзотермическим эффектом и обычно признаются UL 1446 как герметик с изоляцией до 180 ° C, рейтинг класса H.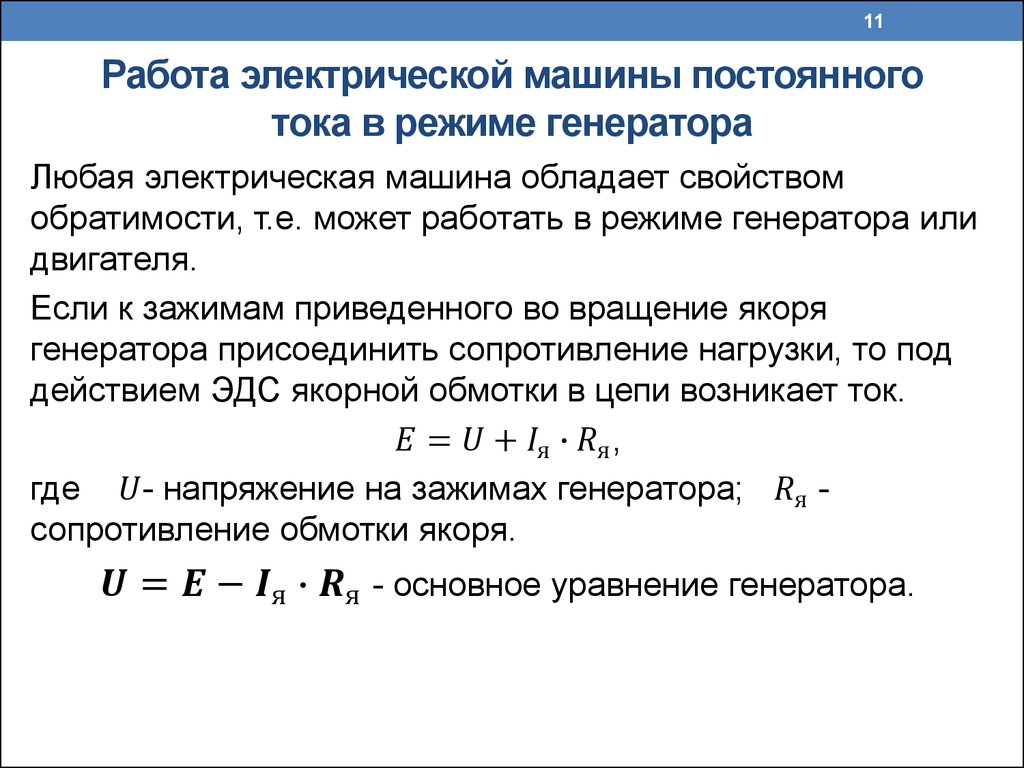
Уникальным преимуществом двигателей постоянного тока без сердечника является отсутствие заедания (колебаний крутящего момента, вызванных изменением силы притяжения между железом и магнитами). В роторе не могут образовываться паразитные вихревые токи, так как он полностью безжелезный, хотя железные роторы ламинированы. Это может значительно повысить эффективность, но контроллеры с регулируемой скоростью должны использовать более высокую скорость переключения (> 40 кГц) или постоянный ток из-за снижения электромагнитной индукции.
Первоначально эти двигатели были изобретены для привода шпилей магнитных ленточных накопителей, где критически важными были минимальное время для достижения рабочей скорости и минимальный тормозной путь. Блинчатые двигатели широко используются в высокопроизводительных сервоуправляемых системах, роботизированных системах, промышленной автоматизации и медицинских устройствах. Из-за разнообразия конструкций, доступных в настоящее время, технология используется в приложениях от высокотемпературных военных до недорогих насосов и базовых сервоприводов.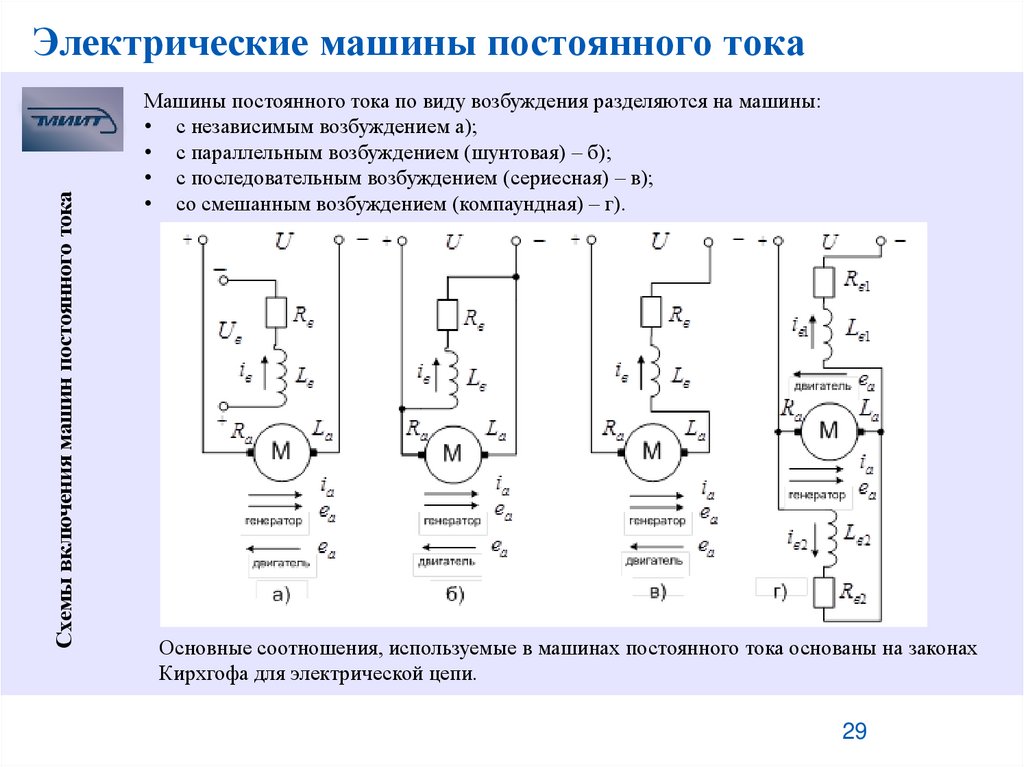
Другой подход (Magnax) заключается в использовании одного статора, помещенного между двумя роторами. Одна такая конструкция обеспечивает пиковую мощность 15 кВт/кг, устойчивую мощность около 7,5 кВт/кг. Этот двигатель с осевым магнитным потоком без ярма предлагает более короткий путь магнитного потока, удерживая магниты дальше от оси. Конструкция позволяет иметь нулевой выступ обмотки; 100 процентов обмоток активны. Это усиливается за счет использования медного провода прямоугольного сечения. Двигатели могут быть соединены друг с другом для параллельной работы. Нестабильность сводится к минимуму за счет того, что два диска ротора прилагают равные и противоположные силы к диску статора. Роторы соединены непосредственно друг с другом через кольцо вала, компенсируя магнитные силы.
Двигатели Magnax имеют диаметр от 15 до 5,4 метра (от 5,9 до 17 футов 8,6 дюйма).
Серводвигатель
Серводвигатель — это двигатель, очень часто продаваемый в виде законченного модуля, который используется в системе управления положением или скоростью с обратной связью. Серводвигатели используются в таких приложениях, как станки, плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизмах, должны иметь хорошо задокументированные характеристики скорости, крутящего момента и мощности. Кривая зависимости скорости от крутящего момента очень важна и имеет большое значение для серводвигателя. Динамические характеристики отклика, такие как индуктивность обмотки и инерция ротора, также важны; эти факторы ограничивают общую производительность контура сервомеханизма. В больших, мощных, но медленно реагирующих контурах сервопривода могут использоваться обычные двигатели переменного или постоянного тока и приводные системы с обратной связью по положению или скорости двигателя. По мере увеличения требований к динамическому отклику используются более специализированные конструкции двигателей, такие как двигатели без сердечника. Превосходные характеристики плотности мощности и ускорения двигателей переменного тока по сравнению с двигателями постоянного тока, как правило, отдают предпочтение синхронным приводам с постоянными магнитами, BLDC, индукционным и SRM-приводам.
Серводвигатели используются в таких приложениях, как станки, плоттеры и другие технологические системы. Двигатели, предназначенные для использования в сервомеханизмах, должны иметь хорошо задокументированные характеристики скорости, крутящего момента и мощности. Кривая зависимости скорости от крутящего момента очень важна и имеет большое значение для серводвигателя. Динамические характеристики отклика, такие как индуктивность обмотки и инерция ротора, также важны; эти факторы ограничивают общую производительность контура сервомеханизма. В больших, мощных, но медленно реагирующих контурах сервопривода могут использоваться обычные двигатели переменного или постоянного тока и приводные системы с обратной связью по положению или скорости двигателя. По мере увеличения требований к динамическому отклику используются более специализированные конструкции двигателей, такие как двигатели без сердечника. Превосходные характеристики плотности мощности и ускорения двигателей переменного тока по сравнению с двигателями постоянного тока, как правило, отдают предпочтение синхронным приводам с постоянными магнитами, BLDC, индукционным и SRM-приводам.
Сервосистема отличается от некоторых приложений с шаговым двигателем тем, что обратная связь по положению непрерывна во время работы двигателя. Шаговая система по своей сути работает с разомкнутым контуром, полагаясь на то, что двигатель не «пропускает шаги» для краткосрочной точности, а любая обратная связь, такая как «домой» переключатель или энкодер положения, является внешней по отношению к системе двигателя. Например, когда типичный матричный компьютерный принтер запускается, его контроллер заставляет шаговый двигатель печатающей головки двигаться до его левого предела, где датчик положения определяет исходное положение и прекращает шаг. Пока питание включено, двунаправленный счетчик в микропроцессоре принтера отслеживает положение печатающей головки.
Шаговый двигатель
Шаговые двигатели часто используются, когда требуется точное вращение. В шаговом двигателе внутренний ротор, содержащий постоянные магниты, или магнитно-мягкий ротор с явно выраженными полюсами управляется набором внешних магнитов, которые переключаются электронным способом. Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и вращающимся соленоидом. Поскольку на каждую катушку по очереди подается питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением. В отличие от синхронного двигателя, шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» — запускается, а затем снова быстро останавливается — от одного положения к другому, поскольку обмотки возбуждения последовательно включаются и обесточиваются. В зависимости от последовательности ротор может вращаться вперед или назад, а также в любое время произвольно менять направление, останавливаться, ускоряться или замедляться.
Шаговый двигатель также можно рассматривать как нечто среднее между электродвигателем постоянного тока и вращающимся соленоидом. Поскольку на каждую катушку по очереди подается питание, ротор выравнивается с магнитным полем, создаваемым обмоткой возбуждения под напряжением. В отличие от синхронного двигателя, шаговый двигатель не может вращаться непрерывно; вместо этого он «шагает» — запускается, а затем снова быстро останавливается — от одного положения к другому, поскольку обмотки возбуждения последовательно включаются и обесточиваются. В зависимости от последовательности ротор может вращаться вперед или назад, а также в любое время произвольно менять направление, останавливаться, ускоряться или замедляться.
Простые драйверы шаговых двигателей полностью запитывают или полностью обесточивают обмотки возбуждения, приводя ротор к «зубчатому» ограниченному числу положений; более сложные драйверы могут пропорционально управлять мощностью обмоток возбуждения, позволяя роторам располагаться между точками зубчатых колес и, таким образом, вращаться очень плавно.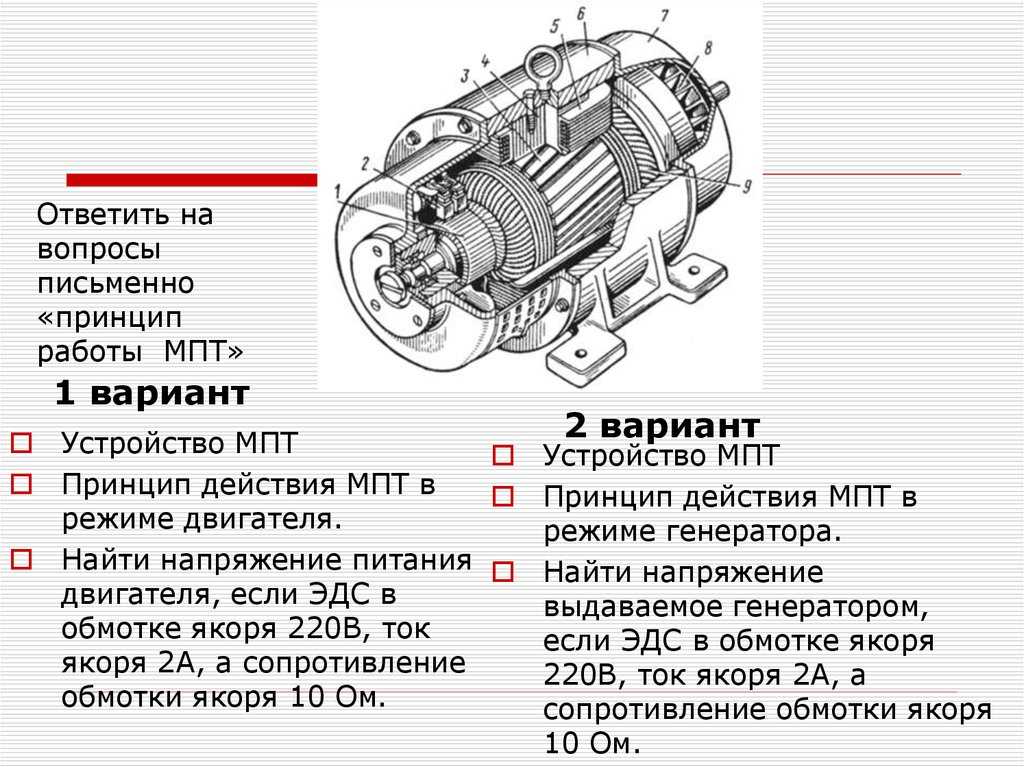 Этот режим работы часто называют микрошагом. Шаговые двигатели, управляемые компьютером, являются одной из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Этот режим работы часто называют микрошагом. Шаговые двигатели, управляемые компьютером, являются одной из самых универсальных форм систем позиционирования, особенно когда они являются частью цифровой системы с сервоуправлением.
Шаговые двигатели можно легко поворачивать на определенный угол дискретными шагами, поэтому шаговые двигатели используются для позиционирования головок чтения/записи в компьютерных дисководах для гибких дисков. Они использовались с той же целью в компьютерных дисководах до гигабайтной эры, где предлагаемая ими точность и скорость были достаточными для правильного позиционирования головки чтения / записи жесткого диска. По мере увеличения плотности дисков ограничения точности и скорости шаговых двигателей сделали их устаревшими для жестких дисков — ограничение точности сделало их непригодными для использования, а ограничение скорости сделало их неконкурентоспособными — поэтому в новых жестких дисках используются системы привода головки на основе звуковой катушки. (Термин «звуковая катушка» в этой связи является историческим; он относится к структуре типичного (конического) громкоговорителя. Эта конструкция некоторое время использовалась для позиционирования головок. Современные приводы имеют поворотное крепление катушки; катушка качается. вперед-назад, что-то вроде лопасти вращающегося вентилятора. Тем не менее, подобно звуковой катушке, проводники катушки современного исполнительного механизма (магнитопровод) движутся перпендикулярно магнитным силовым линиям.)
(Термин «звуковая катушка» в этой связи является историческим; он относится к структуре типичного (конического) громкоговорителя. Эта конструкция некоторое время использовалась для позиционирования головок. Современные приводы имеют поворотное крепление катушки; катушка качается. вперед-назад, что-то вроде лопасти вращающегося вентилятора. Тем не менее, подобно звуковой катушке, проводники катушки современного исполнительного механизма (магнитопровод) движутся перпендикулярно магнитным силовым линиям.)
Шаговые двигатели использовались и до сих пор часто используются в компьютерных принтерах, оптических сканерах и цифровых копировальных аппаратах для перемещения оптического сканирующего элемента, каретки печатающей головки (матричных и струйных принтеров), валика или подающих роликов. Точно так же многие компьютерные плоттеры (которые с начала 1990-х годов были заменены широкоформатными струйными и лазерными принтерами) использовали роторные шаговые двигатели для движения пера и валика; типичными альтернативами здесь были либо линейные шаговые двигатели, либо серводвигатели с аналоговыми системами управления с обратной связью.
Так называемые кварцевые аналоговые наручные часы содержат самые маленькие обычные шаговые двигатели; они имеют одну катушку, потребляют очень мало энергии и имеют ротор с постоянными магнитами. Такой же двигатель приводит в действие кварцевые часы с батарейным питанием. Некоторые из этих часов, например хронографы, содержат более одного шагового двигателя.
Тесно связанные по конструкции с трехфазными синхронными двигателями переменного тока, шаговые двигатели и SRM классифицируются как двигатель с переменным сопротивлением. Шаговые двигатели использовались и до сих пор часто используются в компьютерных принтерах, оптических сканерах и станках с числовым программным управлением (ЧПУ), таких как маршрутизаторы, плазменные резаки и токарные станки с ЧПУ.
Немагнитные двигатели
Электростатический двигатель основан на притяжении и отталкивании электрического заряда. Обычно электростатические двигатели являются двойными по сравнению с обычными двигателями на основе катушек. Обычно им требуется источник питания высокого напряжения, хотя очень маленькие двигатели используют более низкое напряжение. Обычные электродвигатели вместо этого используют магнитное притяжение и отталкивание и требуют высокого тока при низком напряжении. В 1750-х годах Бенджамином Франклином и Эндрю Гордоном были разработаны первые электростатические двигатели. Сегодня электростатический двигатель находит частое применение в микроэлектромеханических системах (МЭМС), где их управляющие напряжения ниже 100 вольт, а движущиеся заряженные пластины изготовить гораздо проще, чем катушки и железные сердечники. Кроме того, молекулярный механизм, управляющий живыми клетками, часто основан на линейных и вращающихся электростатических двигателях.
Обычно им требуется источник питания высокого напряжения, хотя очень маленькие двигатели используют более низкое напряжение. Обычные электродвигатели вместо этого используют магнитное притяжение и отталкивание и требуют высокого тока при низком напряжении. В 1750-х годах Бенджамином Франклином и Эндрю Гордоном были разработаны первые электростатические двигатели. Сегодня электростатический двигатель находит частое применение в микроэлектромеханических системах (МЭМС), где их управляющие напряжения ниже 100 вольт, а движущиеся заряженные пластины изготовить гораздо проще, чем катушки и железные сердечники. Кроме того, молекулярный механизм, управляющий живыми клетками, часто основан на линейных и вращающихся электростатических двигателях.
Пьезоэлектрический двигатель или пьезодвигатель представляет собой тип электродвигателя, основанный на изменении формы пьезоэлектрического материала при приложении электрического поля. Пьезоэлектрические двигатели используют обратный пьезоэлектрический эффект, при котором материал производит акустические или ультразвуковые колебания для создания линейного или вращательного движения.