Что влияет на управляемость и устойчивость автомобиля на дороге? Особенности, критерии, факторы и детали
Сегодня в статье мы узнаем, что влияет на управляемость автомобиля, какие критерии, факторы, детали рулевого и подвески оказывают непосредственное воздействие на устойчивость транспортного средства на дорожном полотне.
Рекомендуем к прочтению нашу статью, посвященную основным признакам неисправности рулевой рейки.
{banner_adsensetext}
Одним из верных признаков исправности, который следует учитывать при выборе нового или поддержанного автомобиля с пробегом является его управляемость. Управляемость — это определенное свойство, характеризующееся способностью транспортного средства четко, а самое главное быстро отзываться на изменение курса движения и ориентации в пространстве. В идеальных условиях, управляемость машины не должна зависеть от таких факторов, как скорость движения и маневрирование. Однако зачастую на практике, с увеличением скорости движения, управляемость автомобиля становится хуже, причем с каждой последующей единицей км/ч, поэтому даже одно малейшее неверное действие способно приводить к непредсказуемым последствиям.
Однако зачастую на практике, с увеличением скорости движения, управляемость автомобиля становится хуже, причем с каждой последующей единицей км/ч, поэтому даже одно малейшее неверное действие способно приводить к непредсказуемым последствиям.
Удержание автомобиля на дороге – важная особенность, которая влияет, как на качество вождения, так и на безопасность водителя с пассажирами. Такой критерий, как управляемость показывает то, как автомобиль реагирует на команды водителя посредством воздействия на него через рулевое колесо на дорожном полотне при прямолинейном движении, маневрировании и в поворотах. Автомобили с хорошими характеристиками управляемости могут входить в повороты без заноса на более высоких скоростях, при этом водитель с меньшей долей вероятности потеряет контроль над транспортным средством. Все это достигается за счет использования силы трения, которая выступает против центробежной силы, направленной на автомобиль. Справочно заметим, что характеристики управляемости автомобиля, напрямую зависят от класса, марки и модели транспортного средства. В то время, как у легковых автомобилей уровень сцепления на бездорожье может быть посредственным, у внедорожников или кроссоверов этот показатель может быть, наоборот, более высоким.
В то время, как у легковых автомобилей уровень сцепления на бездорожье может быть посредственным, у внедорожников или кроссоверов этот показатель может быть, наоборот, более высоким.
Какие факторы влияют на управляемость и устойчивость автомобиля?
Как правило, управляемость и устойчивость автомобиля на дороге, напрямую зависит от состояния рулевой системы и деталей подвески. Рулевая и подвеска — это самые важные компоненты транспортного средства, посредством которых колеса вступают в прямой контакт с дорогой и автомобиль становится, как бы одним целым с дорожным полотном. Кроме того, важную роль в устойчивости автомобиля на дороге играют аэродинамические характеристики кузова, центр тяжести, тип шин, настройка шасси и наличие электронных помощников, на примере, системы курсовой устойчивости ESP.
{banner_reczagyand}
Ключевые факторы, влияющие на управляемость и устойчивость автомобиля:
В заключении отметим, что по мнению большинства автоспециалистов, ключевое виляние на управляемость автомобиля все же оказывают элементы подвески. Так, например, на типовых городских автомобилях подвеска сконструирована таким образом, что показатели мягкости и управляемости практически сопоставимы друг другом, причем это прямо пропорциональные характеристики, поэтому изменение одних настроек, может стать причиной ухудшения других (справочно: если сделать автомобиль более управляемым, то нам параллельно с этим необходимо будет настроить более жесткий ход, следовательно, ухудшить уровень комфорта в процессе движения).
БЛАГОДАРИМ ВАС ЗА ВНИМАНИЕ. ПОДПИСЫВАЙТЕСЬ НА НАШИ НОВОСТИ. ДЕЛИТЕСЬ С ДРУЗЬЯМИ.
критерии и факторы — Volk96
Содержание статьи:
- Что это такое
- Факторы, которые влияют
- Критерии управляемости
- В каких случаях целесообразно улучшать машину
- Шины
- Подвеска
- Шасси
- Угол установки колес
- Система курсовой устойчивости
- Лучшие машины по управляемости
Управляемость автомобиля – это фактор, который беспокоит многих водителей. От него зависит не только скорость передвижения, но и безопасность пассажиров. Существует несколько уровней управляемости – базовый и «продвинутый». В этой статье вы сможете найти информацию о том, как повысить управляемость автомобиля и нужно ли это делать для обычных городских поездок.
От него зависит не только скорость передвижения, но и безопасность пассажиров. Существует несколько уровней управляемости – базовый и «продвинутый». В этой статье вы сможете найти информацию о том, как повысить управляемость автомобиля и нужно ли это делать для обычных городских поездок.
Что это такое?
Вам будет интересно:Как натягивать цепь на ВАЗ-2106: краткое руководство
Что такое управляемость машины? Это свойство, которое характеризуется способностью автомобиля быстро и четко откликаться на смену курса и ориентацию в пространстве. В идеале, управляемость автомобиля не должна зависеть ни от скорости, ни от внешних факторов (например, ветра). Но на практике с повышением скорости управляемость транспортного средства становится все хуже, и часто даже одно неверное движение может привести к трагичным последствиям.
Плохая управляемость автомобиля сказывается не только на маневрах, но и на безопасности пассажиров. Поэтому многие водители стремятся улучшить ее.
Вам будет интересно:»Рено Duster»: технические характеристики, отзывы владельцев, фото
К тюнингу нередко прибегают и владельцы спортивных автомобилей. Если подвеска в таком спорткаре установлена слишком мягкая, то управляемость на дороге ухудшается, и у автомобилистов появляется два варианта: продать ее или переделать. Нередко ценители останавливаются на втором варианте и пытаются сделать машину своей мечты из конвейерного экземпляра. Нужно отметить, что для обычной езды по городу или на небольшие расстояния большинство современных автомобилей обладают достаточными характеристиками по управляемости. Их нет нужды улучшать, так как это довольно дорого и не всегда имеет смысл. Но если вы все же решили отправить свою машину на тюнинг, то непременно должны узнать, какие факторы влияют на управляемость.
Факторы, которые влияют
Устойчивость машины зависит от многих факторов. Но основными критерием управляемости автомобиля является следующие:
- стабилизация управляемых колес;
- угол развала и схождения;
- кузов автомобиля;
- тип и состояние подвески;
- шины;
- наличие блокировки колес при торможении;
- состояние рулевого управления.

Вам будет интересно:»Ягуар F-Pace»: отзывы, описание, характеристики, плюсы и минусы
Каждая из этих деталей может как ухудшить, так и улучшить состояние автомобиля. Для того чтобы получить идеально управляемую машину нужно проделать большую работу по установке и замене некоторых элементов.
Критерии управляемости
Критерии управляемости – это важный оценочный фактор, который должны соблюдать при производстве машин все производители. Основные критерии занесены в ГОСТ и используются при испытаниях новых моделей. Но для обычных автомобилистов не нужны сложные расчеты. Понять, что автомобиль плохо управляется можно даже во время ежедневной поездки на работу.
- Устойчивость. Российские дороги далеки от идеальных, и на пути нередко встречаются большие и маленькие ямы. Если вы случайно попадете колесом в одно из таких отверстий, ваш автомобиль не должен сильно отклониться от курса. В противном случае велика вероятность вылететь на соседнюю полосу, так как на большой скорости градус отклонения будет больше.

- Вхождение в поворот должно быть четким и предсказуемым. Угол входа не должен сильно отличаться из-за внешних факторов или материала покрытия. На автомобилях с хорошей подвеской точная траектория во время прохождения изгибов и поворотов возможна даже на большой скорости.
- Сцепление с дорогой. Автомобиль в любых условиях должен быстро и четко откликаться на движение руля. Затруднений также не должно вызывать резкий разгон или торможение. Такие характеристики машина в идеале должна поддерживать как на сухом, так и на мокром покрытии, а также во время зимы.
Управляемость автомобиля зависит от многих факторов. Ее довольно сложно рассчитать, все-таки одним уравнением тут не обойдешься. Поэтому большинство водителей предпочитают руководствоваться собственным опытом. Главным критерием управляемости является достаточная поворачиваемость в тяжелых условиях (высокая скорость, снег или дождь).
В каких случаях целесообразно улучшать машину?
Вам будет интересно:Установка подкрылок: описание, способы монтажа, советы мастеров, фото
Улучшать управляемость машины нужно далеко не во всех случаях. Как правило, большинство современных транспортных средств обладает усредненными значениями, которые помогают спокойно ездить в рекомендованных производителем скоростных промежутках. Кому все же стоит задуматься об устойчивости и управляемости автомобиля?
Как правило, большинство современных транспортных средств обладает усредненными значениями, которые помогают спокойно ездить в рекомендованных производителем скоростных промежутках. Кому все же стоит задуматься об устойчивости и управляемости автомобиля?
- Владельцам спортивных автомобилей. Тем, кто покупает машины специально для быстрой и агрессивной езды, как правило, хочется что-то доделать и улучшить в автомобиле, так как нет предела совершенству. Однако нужно понимать, что улучшение управляемости обходится либо дорого, либо очень дорого, поэтому весь бюджет лучше планировать заранее.
- Владельцам поддержанных машин. Со временем в них ухудшается состояние некоторых деталей, и они нуждаются в корректировки для нормальной управляемости.
Даже если вы решили сделать тюнинг машины без объективных причин, скорее всего, это повысит ее технические характеристики. Ведь такие автомобили лучше сопротивляются боковому сносу, могут сохранять высокую скорость даже в повороте, а благодаря хорошим шинам и правильной балансировке их тормозные и разгонные свойства также улучшаются.
Шины
Как повысить управляемость автомобиля? Первое, на что стоит обратить внимание – это шины. Именно они обеспечивают сцепление с дорогой. Замена шин – это быстрый и недорогой способ улучшить управляемость. При улучшении технических характеристик важно иметь ввиду, что, прежде всего, шины должны быть достаточно новыми. Резина с изношенным протектором на скользком покрытии и при большой скорости не оставляет даже самому спортивному автомобилю шансов похвастаться своей управляемостью. Пятно контакта необходимо максимально увеличить. Для этого можно выбрать более широкие шины с низкой высотой боковины. Это поможет улучшить поведение машины на дороге. Кроме этого, должны соблюдаться и такие простые правила, как соблюдение сезонности, нормального давления внутри камеры и использование одинаковых колес на разных осях.
Помимо шин на управляемость автомобиля оказывает влияние размер дисков. Чем больше ширина и диаметр колеса, тем более устойчивой станет машина. Но при этом нужно учитывать, что увеличение размера колес может негативно сказаться на ходовой части, поэтому перед заменой лучше всего будет проконсультироваться со специалистом.
Подвеска
Главную роль в управляемости машины играет подвеска. На обычных автомобилях она сконструирована так, чтобы параметры управляемости и мягкости были примерно равны друг другу. Так как это прямо пропорциональные характеристики, развитие одной из них станет причиной ухудшения другой. Например, если вы хотите сделать машину более управляемой, то вам придется сделать ход более жестким и менее комфортным. Что стоит изменить в подвеске, чтобы автомобиль стал лучше вести себя на дороге?
Шасси
Что влияет на управляемость автомобиля помимо вышеперечисленных деталей? Конечно же, это шасси. Для идеального поведения автомобиля на дороге важно, чтобы все четыре колеса во время поворота поддерживали одинаковое сцепление с дорогой. Это называется нейтральным балансом. Большинство же автомобилей, которые выпускаются на производстве, имеют недостаточный контакт с дорогой во время поворота. Основное сцепление обычно приходится на передние колеса, а задние в это время просто «проскальзывают». Что можно сделать для того, чтобы исправить ситуацию? Если вы владеете переднеприводным автомобилем, то нужно поставить на заднюю ось более жесткий стабилизатор поперечной устойчивости. Это позволит нормализовать баланс между передней и задней осью и улучшить сцепление с дорогой.
Это позволит нормализовать баланс между передней и задней осью и улучшить сцепление с дорогой.
Угол установки колес
Иногда даже собранные вместе детали и факторы не дают нужного результата. Как улучшить управляемость автомобиля, если ни один из вышеперечисленных методов не помог? Возможно, в этом случае влияние окажет кастор. Кастор – это угол наклона оси поворота колес автомобиля. Передние стойки автомобиля никогда не устанавливают строго вертикально, а всегда под углом к или от водителя. Это позволяет сохранять транспортному средству направление движения прямо, даже в том случае, если усилие было прекращено. Сильнее всего этот эффект заметен во время выхода из поворота, когда руль сам возвращается на место. Само по себе влияние кастора на управляемость автомобиля невелико. Но увеличенный угол позволяет проводить настройку угла развала в более широком диапазоне, а это уже напрямую влияет на площадь контакта колеса с поверхностью.
Вам будет интересно:Nokian Hakka Blue 2: отзывы, технические характеристики, размеры и износостойкость
При работе с колесами также стоит учитывать и угол развала и схождения. При строго вертикальной оси машина становится менее управляемой. Если вы хотите улучшить отзывчивость автомобиля, то следует использовать отрицательный угол развала. При нем автомобиль, входя в поворот, будет сохранять контакт с дорогой. Угол схождения рассчитывается исходя из направления движения. Положительный угол наиболее хорошо сказывается на управляемости, для этого его делают на 10-15 градусов в положительную сторону. К сожалению, такая установка колес способствует более быстрому износу шин, которые неравномерно стираются с одной стороны.
При строго вертикальной оси машина становится менее управляемой. Если вы хотите улучшить отзывчивость автомобиля, то следует использовать отрицательный угол развала. При нем автомобиль, входя в поворот, будет сохранять контакт с дорогой. Угол схождения рассчитывается исходя из направления движения. Положительный угол наиболее хорошо сказывается на управляемости, для этого его делают на 10-15 градусов в положительную сторону. К сожалению, такая установка колес способствует более быстрому износу шин, которые неравномерно стираются с одной стороны.
Система курсовой устойчивости
С каждым годом электронные системы в автомобилях становятся все более продвинутыми. Они помогают устранять ошибки водителя, нивелировать условия внешней среды и корректировать поведение машины на дороге. Большинство из них доступно в автомобилях премиум-класса, но некоторые все чаще появляются и в эконом-сегменте. Одной из таких систем является система курсовой устойчивости. Это активная система высокого уровня, в работе которой используется множество компонентов.
Системы, улучшающие курсовую устойчивость и управляемость автомобиля, построены на базе ABS и используют в своей работе различные датчики:
- поворота руля;
- электрогидравлический модуль;
- датчик скорости;
- датчик поперечных и продольных ускорений.
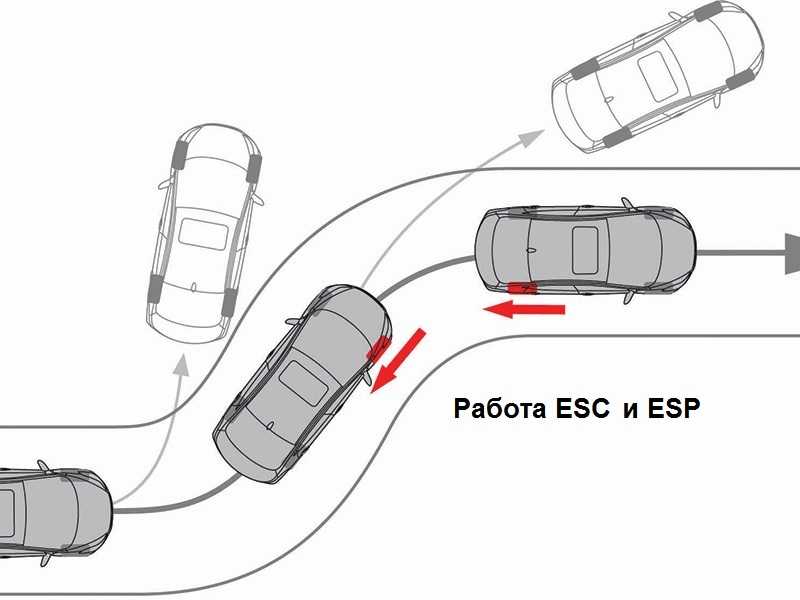
Главная цель системы динамической устойчивости – это соблюдение выбранной траектории движения во время поворота. За счет доступных программе изменений она исключает избыточную или недостаточную поворачиваемость. Также ESP включается при попадании на скользкий участок дороги. Умная система поочередно задействуют тормозные схемы, которые помогают остановить пробуксовку и вернуть управление водителю.
Лучшие машины по управляемости
Если вы не хотите вкладывать безумные деньги в тюнинг уже купленной машины, то идеальным выбором для вас станет покупка нового автомобиля с хорошей управляемостью. Такие модели выпускаются, и их не так уж мало.
Такие модели выпускаются, и их не так уж мало.
- Ford Mondeo не зря так популярен во всем мире. Его универсальность сочетается с отличными характеристиками.
- BMW третьей серии выделяется среди прочих моделей оптимальной балансировкой и развесовкой. Благодаря стараниям инженеров вы не только не почувствуете ухабов на дороге, но и получите полный контроль над движением автомобиля. Даже в тяжелых условиях (зимой или в дождь) «БМВ» не снижает своих характеристик.
- Ford Focus очень популярен среди семей с детьми, поэтому компания отдельно позаботилась о безопасности и управляемости машины. Отзывы покупателей доказывают то, что автомобиль отлично ведет себя на дороге при любых скоростях.
- Subaru Impreza является бюджетным и экономичным вариантом полуспортивного автомобиля. В ней можно найти продуманное рулевое управление, а также полный привод. В результате владелец получает отличный контакт с дорогой и уверенное вхождение в поворот.
- Kia Sportage — кроссовер, который обладает достаточно хорошей подвеской и жесткими амортизаторами.
 При этом на комфорте водителя и пассажиров этот факт никак не сказывается. Маневренность и отзывчивость управления сделали Sportage настоящим лидером продаж.
При этом на комфорте водителя и пассажиров этот факт никак не сказывается. Маневренность и отзывчивость управления сделали Sportage настоящим лидером продаж.
Источник
Системы контроля устойчивости автомобиля
Поделись этим: Фейсбук Логотип Facebook Твиттер Логотип Твиттера Реддит Логотип Reddit LinkedIn Логотип LinkedIn WhatsApp Логотип WhatsApp
В соответствии с дизайном хорошо настроенного пассивного транспортного средства предлагаемый контроллер не будет стабилизировать транспортное средство во время маневров в установившемся режиме. Так что никаких ЗСС на весь рабочий диапазон машины.
3.1 Введение в главу
В этой главе будет представлен обзор прошлых исследований, посвященных методам управления моментом рыскания и, в частности, управлению задними колесами. В этом обзоре представлены рекомендации по внедрению заднего рулевого управления в будущую боевую машину с колесной формулой 8×8. Большая часть исследований была проведена на 4-колесном 2-осном транспортном средстве, однако точки исследования могут быть интерпретированы для 4-осного транспортного средства 8×8.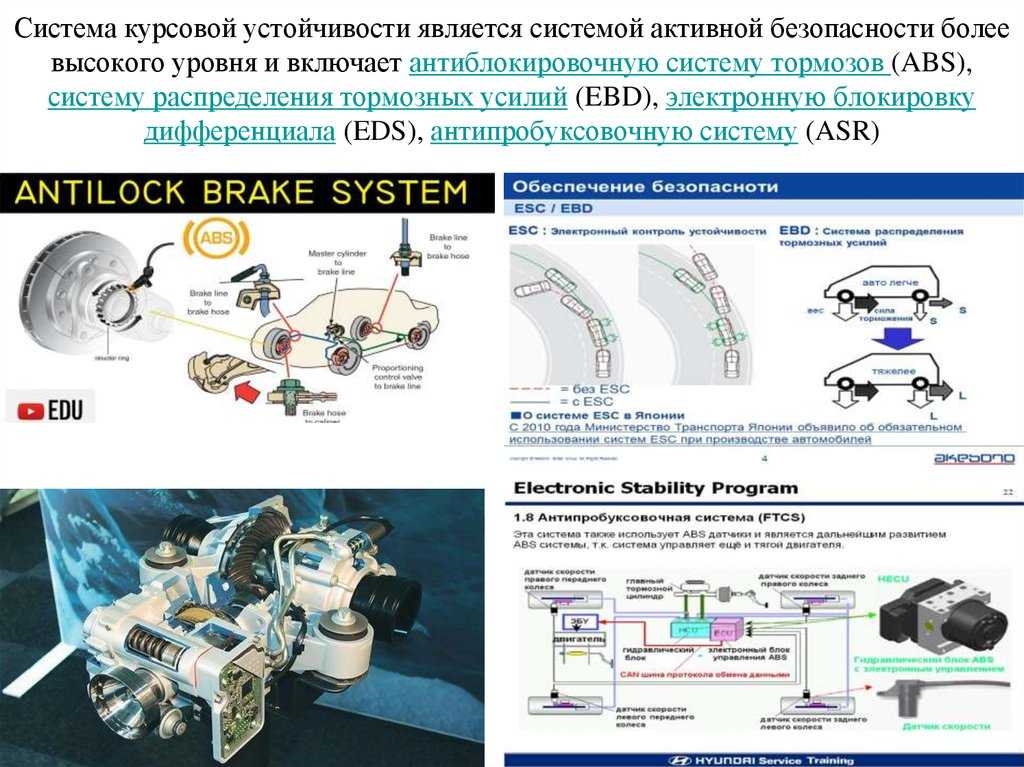
3.2 Системы контроля устойчивости автомобиля
В настоящее время в автомобильной промышленности крайне маловероятно, что потребительский автомобиль будет предлагаться без системы контроля помощи водителю. С момента появления этих систем основное внимание было уделено характеристикам автомобиля, а не только его безопасности. Развитие систем контроля устойчивости началось с антиблокировочных тормозных систем (ABS) и систем контроля тяги (TCS), которые помогали поддерживать курсовую устойчивость автомобиля в аварийных ситуациях. Эти системы ограничивают продольное скольжение колес и блокируют их за счет активного управления дроссельной заслонкой и торможения. Когда шины работают в режиме проскальзывания с максимальным сцеплением, могут быть достигнуты кратчайший тормозной путь и наиболее эффективное время разгона [1]. Дальнейшие разработки были направлены на восстановление устойчивости в случае движения автомобиля в нежелательном направлении с помощью электронной системы контроля устойчивости (ESC). Когда траектория движения автомобиля отличается от предполагаемого направления действий водителя, система ESC активирует один из четырех тормозов, чтобы восстановить курсовую устойчивость автомобиля. Исследование, проведенное Шведской дорожной администрацией в 2006 году [2], показало, что ESC снизила количество аварий с травмами на 13% для всех типов аварий и на 35% для аварий на мокром или обледенелом дорожном покрытии.
Когда траектория движения автомобиля отличается от предполагаемого направления действий водителя, система ESC активирует один из четырех тормозов, чтобы восстановить курсовую устойчивость автомобиля. Исследование, проведенное Шведской дорожной администрацией в 2006 году [2], показало, что ESC снизила количество аварий с травмами на 13% для всех типов аварий и на 35% для аварий на мокром или обледенелом дорожном покрытии.
Развитие управления транспортными средствами с помощью компьютеров продвинулось от помощи в аварийной ситуации к повышению производительности транспортных средств. Одной из основных задач, направленных на улучшение управляемости транспортных средств, было управление рысканьем транспортного средства. В потребительских автомобилях использовались многие системы, включая дифференциальное торможение, векторизацию крутящего момента, а также активное рулевое управление передней и задней осями. Все эти методы сосредоточены на увеличении или уменьшении момента рыскания транспортного средства для повышения производительности и устойчивости транспортного средства. Также полезно уменьшить угол бокового скольжения транспортного средства, чтобы сохранить управляемость на поверхности с низким коэффициентом трения, а также поддерживать шины в пределах их рабочего диапазона рулевого управления для создания боковых сил {Piyabongkarn, 2009#450}.
Также полезно уменьшить угол бокового скольжения транспортного средства, чтобы сохранить управляемость на поверхности с низким коэффициентом трения, а также поддерживать шины в пределах их рабочего диапазона рулевого управления для создания боковых сил {Piyabongkarn, 2009#450}.
Liebmann et al. {Liebemann, 2004 #453} изучает эффективность программы Bosch Electric Stability Control Program (ESP). Компания Bosch представила ESC миру автомобилестроения в качестве поставщика, впоследствии поставив более 10 миллионов систем в различных конфигурациях автомобилей по всему миру. ESP можно адаптировать для управления рысканьем, а также для ограничения угла бокового скольжения автомобиля для различных конфигураций транспортных средств за счет использования активного управления торможением. Система ESP была адаптирована для предотвращения опрокидывания автомобилей с более высоким центром тяжести.
3.3 Основные принципы контроля рыскания
Рис. 3‑1 Функционирование контроля устойчивости рыскания {Rajamani, 2011 #429}
Рысканье транспортного средства описывает поведение транспортного средства при вращении вокруг своей вертикальной оси. С точки зрения характеристик транспортного средства поведение транспортного средства в вертикальной плоскости можно использовать для интерпретации ожидаемой траектории транспортных средств относительно намеченной траектории. Применяя систему контроля рыскания транспортного средства, можно поддерживать курсовую устойчивость. Теория, лежащая в основе управления рысканьем транспортного средства, заключается в управлении моментом, возникающим в результате манипулирования контактом шины с дорогой. Управление скоростью рыскания транспортного средства повышает устойчивость транспортного средства, а также позволяет транспортному средству работать ближе к предельным характеристикам.
С точки зрения характеристик транспортного средства поведение транспортного средства в вертикальной плоскости можно использовать для интерпретации ожидаемой траектории транспортных средств относительно намеченной траектории. Применяя систему контроля рыскания транспортного средства, можно поддерживать курсовую устойчивость. Теория, лежащая в основе управления рысканьем транспортного средства, заключается в управлении моментом, возникающим в результате манипулирования контактом шины с дорогой. Управление скоростью рыскания транспортного средства повышает устойчивость транспортного средства, а также позволяет транспортному средству работать ближе к предельным характеристикам.
Существует множество различных способов управления рысканьем автомобиля. Во всех подходах используется одна и та же теория, которая увеличивает момент вокруг центра тяжести за счет активного контроля боковых или продольных сил, распределяемых шинами. Боковой динамикой автомобиля можно эффективно управлять, изменяя угол увода шины или изменяя распределение крутящего момента или тормозного момента.
Системы контроля устойчивости, ориентированные на обратную связь по скорости рыскания, широко коммерциализируются производителями автомобилей {Sawase, 2006 #280}{Tseng, 19 лет99 # 451 {Tseng, 1999 # 452} {Liebemann, 2004 # 453} {Hoffman, 1998 # 454}. Мониторинг рыскания является эффективным методом сохранения контроля над транспортным средством без ущерба для управляемости транспортного средства. Желаемая скорость рыскания интерпретируется на основе сигнала рулевого колеса и скорости транспортного средства и используется в коммерческих транспортных средствах в качестве меры безопасности и позволяет водителю работать ближе к пределам управляемости транспортного средства, не теряя управления.
3.4 Основные принципы контроля бокового скольжения
Боковое скольжение транспортного средства (β) используется для описания угла курса транспортного средства в зависимости от направления движения транспортного средства. Ограничение угла бокового скольжения транспортного средства обеспечивает лучший контроль, поскольку, следовательно, углы скольжения шин не достигают насыщения {Ahmadi, 2009 #455}.
Хотя боковое скольжение транспортного средства нелегко точно измерить, существует все больше способов определения угла бокового скольжения динамичного транспортного средства. Разумные оценки бокового скольжения транспортного средства можно оценить с помощью скорости транспортного средства и поперечного ускорения. Более точную оценку можно получить путем интеграции вектора скорости транспортного средства на основе GPS с вектором скорости транспортного средства из блока инерциальных измерений (IMU). Дейли и др. {Daily, 2004 #456} описывает ошибку этого метода в основном из-за ошибки измерения GPS и может быть скорректирована с помощью функции ошибки скорости. Основной проблемой измерений на основе GPS является ненадежность в среде с высокими объектами.
Пиябонгкарн и др. {Piyabongkarn, 2009 #450} определяют другие методы наблюдения за углом бокового скольжения транспортного средства, включая использование оптических датчиков и оценки на основе динамической модели. В этой статье также обсуждается новый метод оценки угла скольжения, в котором используется оценка на основе модели в сочетании с оценкой на основе кинематики. Благодаря экспериментальной реализации боковое скольжение транспортного средства было эффективно рассчитано и обеспечивает надежную оценку угла бокового скольжения транспортного средства при экстремальных маневрах.
Благодаря экспериментальной реализации боковое скольжение транспортного средства было эффективно рассчитано и обеспечивает надежную оценку угла бокового скольжения транспортного средства при экстремальных маневрах.
3.5 Векторизация крутящего момента
Векторизация крутящего момента — это термин, обозначающий распределение крутящего момента двигателя на ведущие колеса. Если транспортное средство поворачивает, внешнее колесо перемещается на процент больше, чем внутреннее колесо. Прилагая больший крутящий момент к внешним колесам во время поворота, автомобиль с большей вероятностью завершит маневр с большей уверенностью. Такие компании, как Mitsubishi, Ford, Nissan, ….
Ранняя разработка Mitsubishi Motors по управлению вектором крутящего момента была направлена на создание «автомобиля, которым каждый может безопасно управлять». Чтобы избежать рулевого управления с тормозом, которое снижает скорость автомобиля и противоречит действиям водителя, Mitsubishi разработала систему активного контроля рыскания (AYC) с использованием «механизма передачи крутящего момента» наряду с уже разработанной системой активного контроля устойчивости (ASC). Результатом стал дифференциал передачи крутящего момента, который применялся только к задней оси полноприводного автомобиля. В системе использовалась система управления с прямой связью для улучшения реакции автомобиля путем анализа вводимого водителем угла поворота рулевого колеса и положения дроссельной заслонки. Это было связано с контролем обратной связи для контроля разницы скорости бокового колеса. Дополнительные системы могли бы поддерживать управление во время маневра дрейфа и регулировать коэффициент усиления контроллера, оценивая коэффициент поверхностного трения µ. Система позволяла достигать более высоких поперечных ускорений за счет управления крутящим моментом влево/вправо, улучшая при этом контроль над автомобилем. При использовании с системой ASC транспортным средством становится легче управлять, а при достижении пределов контроля транспортное средство может восстановиться. [3]
Результатом стал дифференциал передачи крутящего момента, который применялся только к задней оси полноприводного автомобиля. В системе использовалась система управления с прямой связью для улучшения реакции автомобиля путем анализа вводимого водителем угла поворота рулевого колеса и положения дроссельной заслонки. Это было связано с контролем обратной связи для контроля разницы скорости бокового колеса. Дополнительные системы могли бы поддерживать управление во время маневра дрейфа и регулировать коэффициент усиления контроллера, оценивая коэффициент поверхностного трения µ. Система позволяла достигать более высоких поперечных ускорений за счет управления крутящим моментом влево/вправо, улучшая при этом контроль над автомобилем. При использовании с системой ASC транспортным средством становится легче управлять, а при достижении пределов контроля транспортное средство может восстановиться. [3]
3.6 Активная система помощи при торможении
Использование торможения является эффективным методом приложения крутящего момента для восстановления устойчивости или увеличения скорости рыскания автомобиля. Многие автомобильные компании могут легко внедрить активную систему помощи при торможении, потому что она использует то же аппаратное обеспечение, что и ESC, которая является стандартной для всех автомобилей, продаваемых в Северной Америке [4].
Многие автомобильные компании могут легко внедрить активную систему помощи при торможении, потому что она использует то же аппаратное обеспечение, что и ESC, которая является стандартной для всех автомобилей, продаваемых в Северной Америке [4].
Использование тормозного момента для управления рысканием автомобиля отличается от ESC на основе торможения, поскольку для активации не требуется торможение. Гике и др. заявляют, что изменение крутящего момента с помощью тормозов менее навязчиво и более эффективно для управления поперечной динамикой транспортного средства, чем ESC, а также вызывает меньшее снижение скорости [5]. При торможении внутреннего колеса оси с дифференциалом скольжения больший крутящий момент передается на внешнее колесо, обеспечивая желаемое распределение крутящего момента. Как видно на рисунке 2, момент рыскания может быть приложен путем торможения внутренней части 9.0003
Рисунок 3-2: Управление поперечным торможением [6]
3.7 Active Steering Assist
Active Steering Assist описывает систему, которая позволяет компьютерной системе управлять углом поворота рулевого колеса для адаптации к поперечной динамике автомобиля.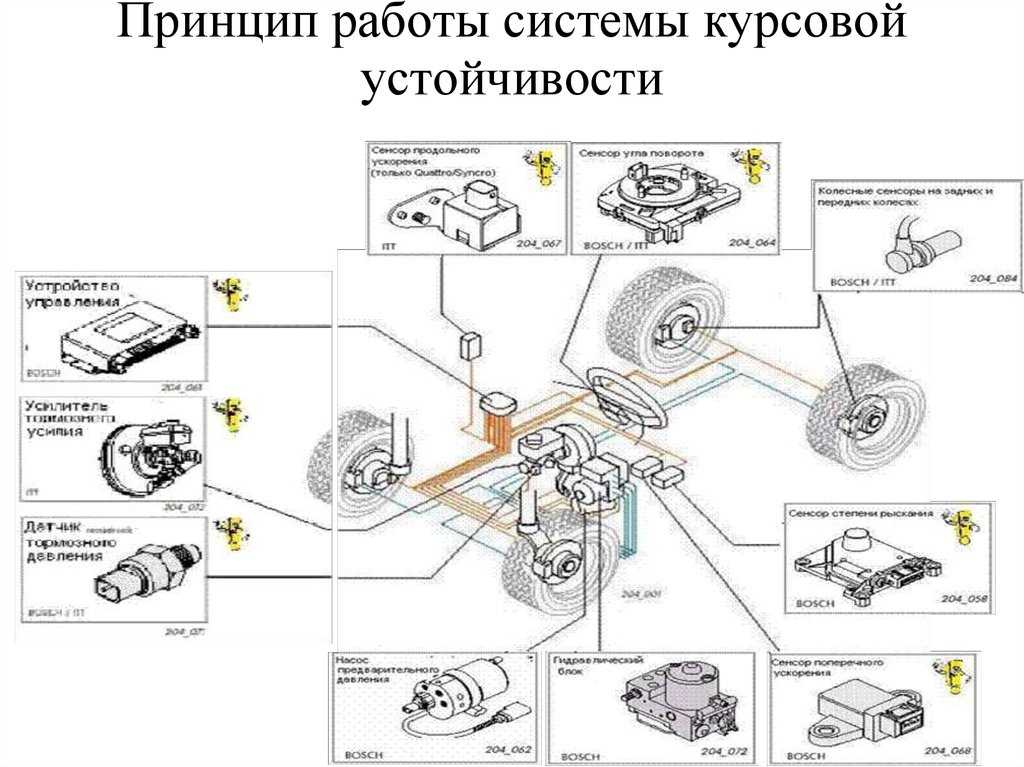 . Эта система также позволяет добавлять полуавтономные системы, такие как помощь в движении по полосе и помощь при экстренном рулевом управлении, что полезно, поскольку системы управления имеют более быструю и точную реакцию, чем водитель [7]. Активная помощь при рулевом управлении позволяет выполнять функцию следования за водителем, в то время как корректировка помех обрабатывается системой управления [8]. Активное рулевое управление также дает некоторые преимущества с точки зрения производительности автомобиля, поскольку непрерывное управление рулевым управлением может исправить водителя в случае совершения ошибки, позволяя с большей уверенностью проверить пределы возможностей устойчивости автомобиля.
. Эта система также позволяет добавлять полуавтономные системы, такие как помощь в движении по полосе и помощь при экстренном рулевом управлении, что полезно, поскольку системы управления имеют более быструю и точную реакцию, чем водитель [7]. Активная помощь при рулевом управлении позволяет выполнять функцию следования за водителем, в то время как корректировка помех обрабатывается системой управления [8]. Активное рулевое управление также дает некоторые преимущества с точки зрения производительности автомобиля, поскольку непрерывное управление рулевым управлением может исправить водителя в случае совершения ошибки, позволяя с большей уверенностью проверить пределы возможностей устойчивости автомобиля.
Ютака и др. предложили новую концепцию надежного активного управления задними колесами, которое обеспечивает разумную производительность транспортного средства, даже если параметры транспортного средства и / или состояние поверхности изменяются. Использование µ-синтеза
Рисунок 3-3: Крутящий момент автомобиля при торможении переднего колеса (слева) и повороте переднего колеса (справа) [7]
активный бычок
Marino et al. использовал развязывающий контроллер, который имеет обратную связь об ошибке скорости рыскания с зависимым от скорости демпфированием рыскания.
использовал развязывающий контроллер, который имеет обратную связь об ошибке скорости рыскания с зависимым от скорости демпфированием рыскания.
3.8 Управление задними колесами (RAS)
Управление задними колесами — это эффективный метод управления боковыми силами, создаваемыми задними шинами. Использование RAS обычно используется для уменьшения радиуса поворота транспортного средства на низких скоростях при одновременном снижении износа шин и встречается во всех типах транспортных средств, начиная от большегрузных автомобилей, пикапов и даже спортивных автомобилей. На высоких скоростях можно использовать рулевое управление задними колесами, чтобы уменьшить боковое скольжение автомобиля. Электронное управление, используемое для УЗВ, расширяет возможности улучшения динамической устойчивости транспортных средств. Подобно активному рулевому управлению, активная система заднего рулевого управления может улучшить поперечную динамику автомобиля, только отдельно от передних углов поворота рулевого колеса. Усовершенствованная динамическая устойчивость становится очень полезной в тяжелых транспортных средствах с высоким центром тяжести в качестве меры предотвращения опрокидывания и повышения боковых характеристик автомобиля. Многие большие грузовики уже включают УЗВ для улучшения маневренности на низкой скорости, однако Харрази и др. {Kharrazi, 2008 #2} предполагает, что необходимы дальнейшие разработки для достижения улучшенной устойчивости транспортного средства к рысканию и реакции, а также улучшения характеристик на поверхностях с разным поверхностным трением слева направо.
Усовершенствованная динамическая устойчивость становится очень полезной в тяжелых транспортных средствах с высоким центром тяжести в качестве меры предотвращения опрокидывания и повышения боковых характеристик автомобиля. Многие большие грузовики уже включают УЗВ для улучшения маневренности на низкой скорости, однако Харрази и др. {Kharrazi, 2008 #2} предполагает, что необходимы дальнейшие разработки для достижения улучшенной устойчивости транспортного средства к рысканию и реакции, а также улучшения характеристик на поверхностях с разным поверхностным трением слева направо.
Существует несколько используемых методов управления углами поворота задних осей: Пассивное управление задними колесами может быть реализовано в автомобиле механическими средствами или методами, которые водитель не может контролировать. Porsche представила заднее рулевое управление с использованием механической связи, называемой осью Вайссаха, которая уменьшила бы избыточную поворачиваемость, вызывая схождение задней оси {Nalecz, 1989 # 457}.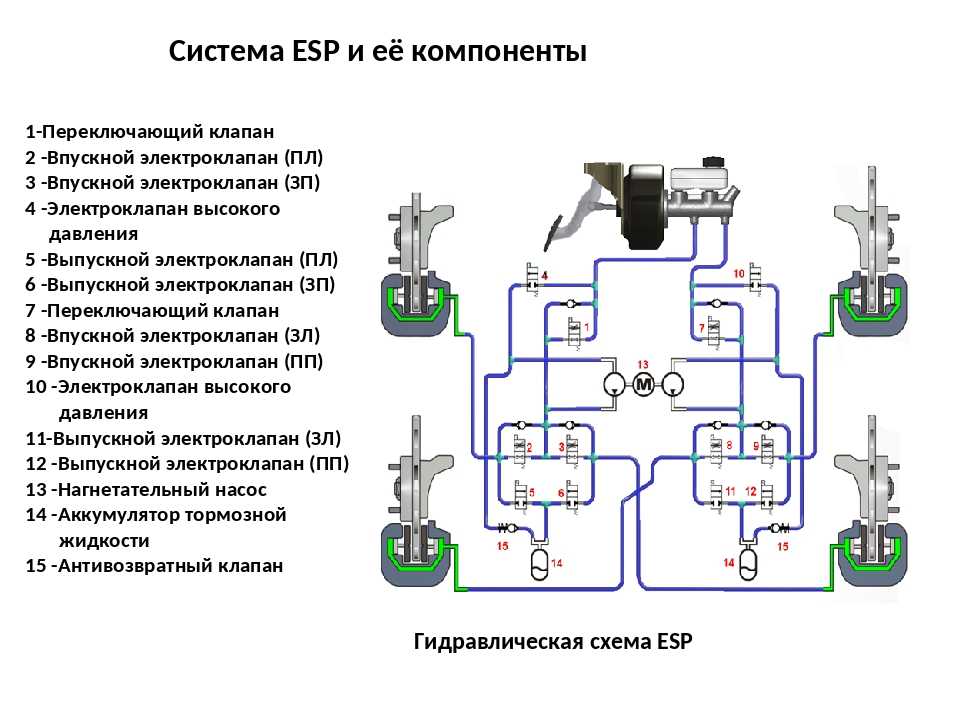 Хотя пассивное рулевое управление не входит в объем этой работы, необходимо оценить методы повышения производительности с помощью механических подходов. Методы управления с прямой связью обычно используют ввод данных водителем для определения рулевого управления задней осью. Методы управления с обратной связью используют показатели производительности транспортного средства для настройки угла поворота задних колес в соответствии с идеальной моделью вождения транспортного средства.
Хотя пассивное рулевое управление не входит в объем этой работы, необходимо оценить методы повышения производительности с помощью механических подходов. Методы управления с прямой связью обычно используют ввод данных водителем для определения рулевого управления задней осью. Методы управления с обратной связью используют показатели производительности транспортного средства для настройки угла поворота задних колес в соответствии с идеальной моделью вождения транспортного средства.
3.9 Методы управления рулевым управлением задними колесами с прямой связью
Методы управления с прямой связью являются эффективным средством для получения преимуществ от активного управления задними колесами за счет вывода угла поворота заднего колеса относительно входного сигнала рулевого управления. Знание компоновки транспортного средства и динамических характеристик транспортного средства может привести к оптимальной настройке контроллера с прямой связью. Маневренность на низких скоростях можно легко повысить с помощью контроллера с прямой связью, а устойчивость транспортного средства не так важна для безопасности на низких скоростях. Исследование Фурукавы и др. {Фурукава, 19 лет89 #413} выделены два метода упреждающего управления.
Исследование Фурукавы и др. {Фурукава, 19 лет89 #413} выделены два метода упреждающего управления.
Во-первых, это метод контроля нулевого бокового скольжения (ZSS). ZSS учитывает скорость автомобиля и рулевое управление. Эти входные данные используются в передаточной функции, которая была получена путем анализа велосипедной модели транспортного средства с двумя степенями свободы с передним и задним углами поворота. Чтобы удовлетворить часть контроллера с нулевым боковым скольжением, угол бокового скольжения в передаточной функции устанавливается равным нулю, а часть скорости рыскания исключается, таким образом создавая зависящее от скорости усиление передаточного числа для угла поворота задней оси по сравнению с передней осью. .
k=-b-maCrlU2a+mbCflU2
Где a и b представляют собой расстояние от передней и задней осей до центра тяжести соответственно,
li – колесная база автомобиля, C f и C r — угловая жесткость передней и задней шин соответственно, а U — скорость автомобиля.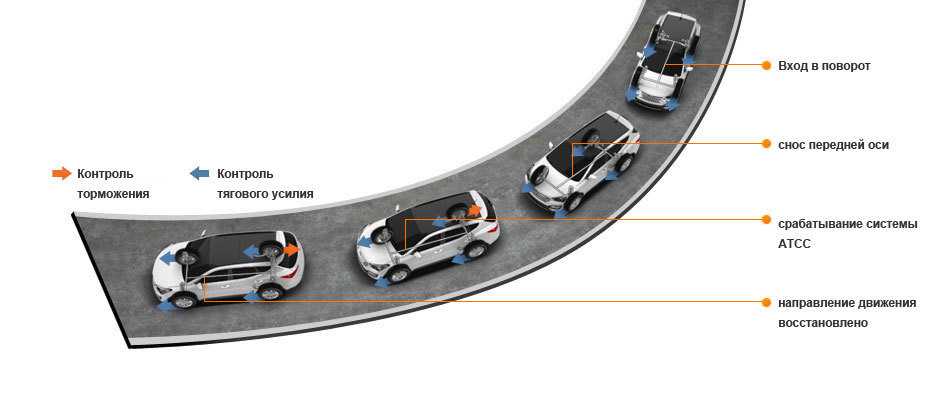 В результате получается взаимосвязь, представленная на рис. 3-5.
В результате получается взаимосвязь, представленная на рис. 3-5.
Рис. 3‑5 Нулевое боковое скольжение (ZSS), зависящее от скорости переднее и заднее отношение
Второй метод, рассмотренный Furukawa et al. это зависимость, зависящая исключительно от угла поворота рулевого колеса. При малых входных углах поворота задние колеса поворачиваются в том же направлении, что и передние. Для больших углов поворота рулевого колеса, которые более вероятны на низкой скорости, поворачивайте задние колеса напротив передних для повышения маневренности. Эта система позволяет улучшить управление на низких и высоких скоростях без необходимости обновления скорости автомобиля в контроллере. Систему RAS, зависящую от угла поворота, можно увидеть на рис. 3‑6.
Рис. 3-6 RAS, зависящая от угла поворота {Furukawa, 1989 #413}
Исследование Fukunada et al. {Fukunaga, 1987 #458} в алгоритме RAS с прямой связью Nissan, который похож на ZSS
Kharrazi et al. [9] наблюдали эффективность управления задними колесами в отношении устойчивости к рысканию и реакции тяжелого грузовика с помощью MATLAB-Simulink и полномасштабного грузовика Volvo.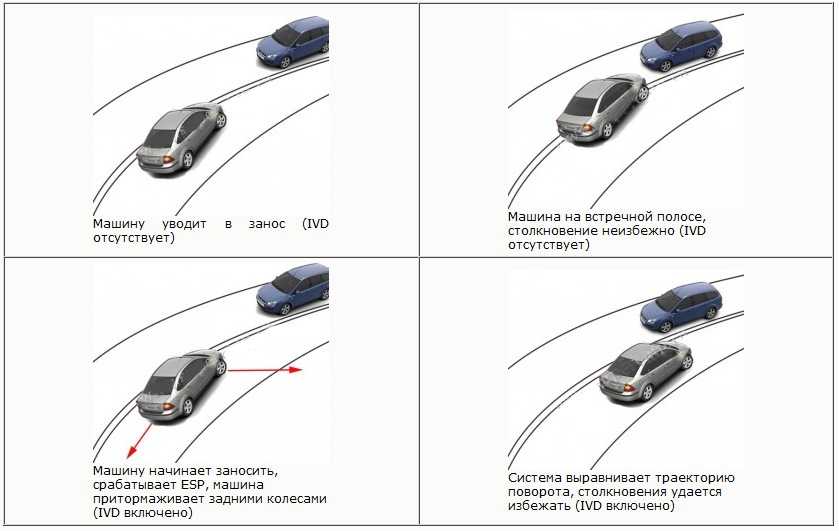 Система управления была сосредоточена на разделенном торможении и высокоскоростных маневрах как на мерах анализа управления транспортным средством. Контроллер управляет задней осью, чтобы удовлетворить действия водителя или контрольную скорость рыскания. Контроллер высокоскоростного рулевого управления состоит из прямой связи первого порядка и пропорциональной обратной связи:
Система управления была сосредоточена на разделенном торможении и высокоскоростных маневрах как на мерах анализа управления транспортным средством. Контроллер управляет задней осью, чтобы удовлетворить действия водителя или контрольную скорость рыскания. Контроллер высокоскоростного рулевого управления состоит из прямой связи первого порядка и пропорциональной обратной связи:
δ3=KFF-TFFsδ1+KFB(rref-r)
Контроллер торможения с раздельным мю использует контроллер прямой связи с пропорциональным усилением для управления задней осью, чтобы компенсировать неравномерность тормозных сил слева и справа. Это уменьшает тормозной путь, позволяя системе ABS работать на пределе своих возможностей, не заставляя водителя противодействовать рулению. Контроллер можно описать следующим образом:
δ3=KpMbrake
Моделирование и полные испытания транспортного средства показывают, что погрешность скорости рыскания может быть уменьшена на 64% при одновременном снижении усилия, необходимого водителю. Контроллер торможения Split-mu, использующий RAS, может сократить тормозной путь как минимум на 10% за счет использования более агрессивной системы ABS и RAS, чтобы поддерживать тот же уровень участия водителя, что и стандартный автомобиль.
Контроллер торможения Split-mu, использующий RAS, может сократить тормозной путь как минимум на 10% за счет использования более агрессивной системы ABS и RAS, чтобы поддерживать тот же уровень участия водителя, что и стандартный автомобиль.
Нагаи и др. {Nagai, 1997 #443} использовал контроллер соответствия модели (MMC), который применяет обратную связь по состоянию как скорости рыскания, так и угла бокового скольжения транспортного средства, чтобы помочь транспортному средству следовать идеальному динамическому пути. Метод MMC использует теорию линейного управления, но доказал свою эффективность в улучшении управляемости и устойчивости транспортного средства даже при изменении параметров транспортного средства. Надежность контроллера чрезвычайно важна для боевой машины, так как масса машины и жесткость на поворотах меняются в зависимости от рельефа местности и назначения машины.
3.10 Разработка моделирования {РАЗДЕЛ МОДЕЛИРОВАНИЯ]
Торможение Split-mu
Чтобы проверить эффективность контроллера торможения Split-mu, Kharrazi et al.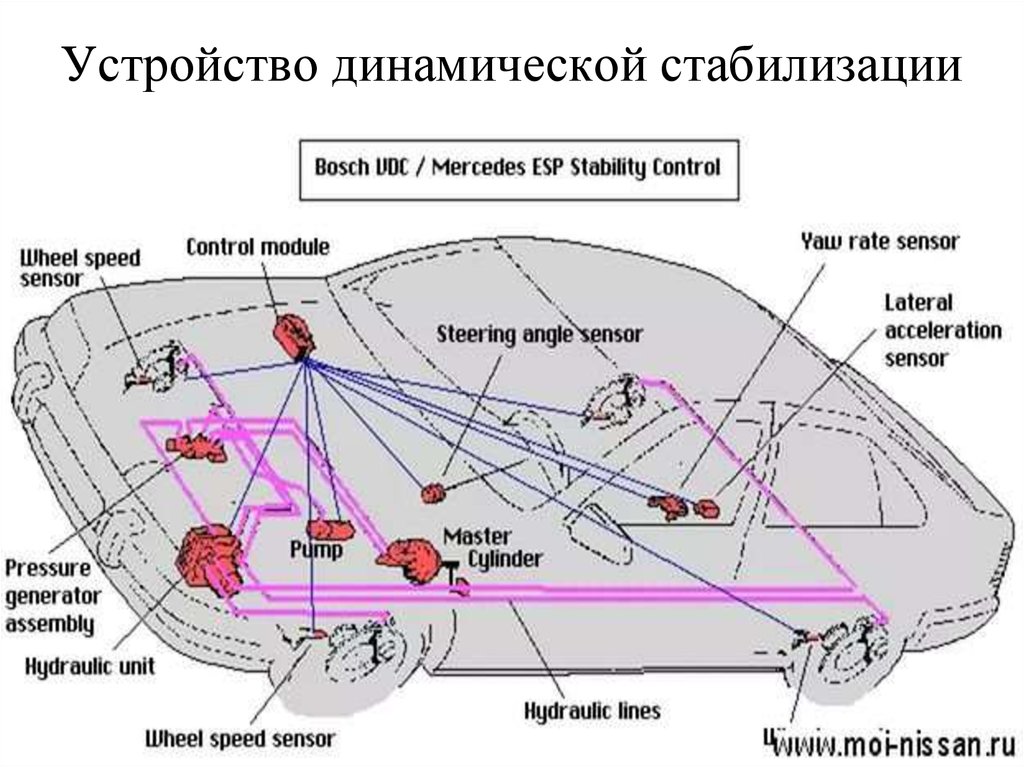 использовал mu_left = 0,15 и mu_right как 0,75 и начальную скорость 50 км/ч. [9]
использовал mu_left = 0,15 и mu_right как 0,75 и начальную скорость 50 км/ч. [9]
Поворот на высокой скорости
Радиус поворота
Смена полосы движения по НАТО
Устойчивость к нелинейности шин и дорожным условиям
Чтобы оценить устойчивость контроллера к нелинейности шин и дорожным условиям, Nagai et al. протестировали переходную реакцию на различные углы поворота рулевого колеса (от 15 до 45 градусов) при различных значениях сцепления с дорогой (mu = 0,8, 0,6, 0,4). В тесте использовался синусоидальный вход рулевого управления с одним периодом, равным 2 секундам. Наблюдая реакцию скорости рыскания на входной сигнал угла поворота рулевого колеса, можно оценить выходной сигнал контроллера по сравнению с желаемым выходным сигналом.
Ссылки:
[1] U. Kiencke and L. Nielsen, Automotive Control Systems: For Engine, Driveline and Vehicle : Springer-Verlag New York, Inc., 2000.
[2] A. Lie, К. Тингвалл, М. Крафт и А. Куллгрен, «Эффективность электронного контроля устойчивости (ESC) в снижении количества аварий и травм в реальной жизни», Предотвращение дорожно-транспортных происшествий, vol.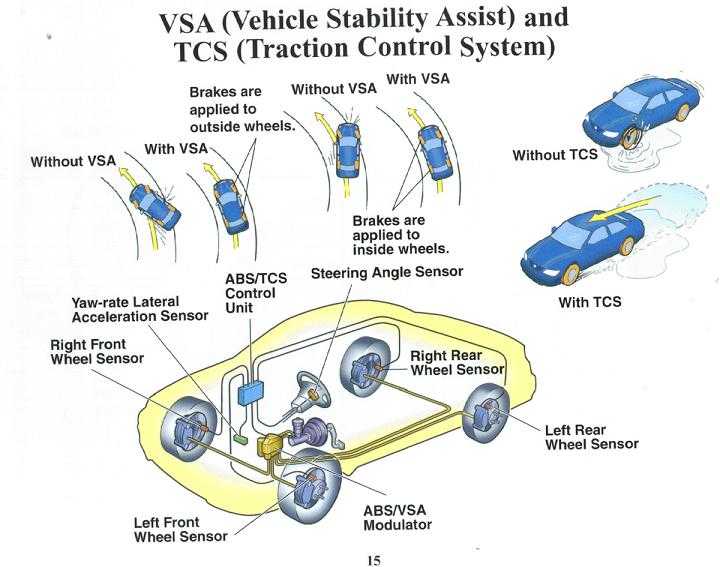 7, стр. 38–43, 2006 г.
7, стр. 38–43, 2006 г.
[3] К. С. Савасе, Ёсиаки, «Применение активного контроля рыскания к динамике автомобиля с использованием движущей/тормозной силы», JSAE Review, vol. 20, стр. 289-295, 1999.
[4] NHTSA (NHTSA), «Электронные системы контроля устойчивости», в Федеральных стандартах безопасности транспортных средств vol. 126-49 CFR, части 571 и 585, изд., 2007 г.
[5] К. Гике, Т. Шим и Дж. Асгари, «Интегрированное управление колесным приводом и тормозным моментом для улучшения управляемости автомобиля», Труды Институт инженеров-механиков, часть D: журнал автомобильной техники, , том. 223, стр. 439-457, 2009.
[6] К. У. Савасе, Юичи; Миура, Таками; «Технология векторизации крутящего момента влево-вправо как основа системы управления всеми колесами Super All Wheel Control (S-AWC)», Mitsubishi Technical Review, , 2006 г.
[7] Дж. Акерманн, д-р Т. Бюнте и Д. Оденталь, «Преимущества рулевого управления Actve для управления динамикой автомобиля», 1999.
[8] Дж. Акерманн и Т. Бюнте, «Подавление возмущений рыскания за счет надежного разъединения рулевого управления автомобиля», Control Engineering Practice, vol. 5, стр. 1131-1136, 1997.
[9] Харрази С., Лидберг М., Лингман П., Ж.-И. Свенссон и Н. Дела, «Эффективность рулевого управления задней осью в отношении устойчивости к рысканию и реакции тяжелого грузовика», Vehicle System Dynamics, vol. 46, стр. 365-372, 2008.
Поделись этим: Фейсбук Логотип Facebook Твиттер Логотип Твиттера Реддит Логотип Reddit LinkedIn Логотип LinkedIn WhatsApp Логотип WhatsApp
Улучшение курсовой устойчивости тяжелого грузовика за счет сочетания торможения и рулевого управления
Внедрение электроники в системы рулевого управления большегрузных автомобилей сделало возможной активную поддержку крутящего момента рулевого управления. Поскольку рулевое управление является эффективным способом избежать курсовой нестабильности, а тормоза работают быстро и не связаны с водителем, комбинация контролируемого рулевого управления и торможения будет полезна при выполнении контроля курсовой устойчивости. Поэтому для этого предлагается метод, основанный на распределении управления. Этот метод уникален тем, что в нем используются комбинированные квадратичные поперечные и продольные ограничения шины, вычисляемые в режиме реального времени, что потенциально может обеспечить более высокий корректирующий момент рыскания, чем обычно используемый подход с линейными ограничениями, и что его можно адаптировать к любым тяжелым условиям. Комбинация транспортных средств. Этот метод был протестирован и сравнен со стандартной системой контроля устойчивости в трех различных маневрах с использованием тяжелого одиночного тягача на замерзшем озере. Было замечено, что измеренное отклонение от намеченного пути с помощью нового метода уменьшилось до нескольких метров. Также улучшился рейтинг водителя.
Поэтому для этого предлагается метод, основанный на распределении управления. Этот метод уникален тем, что в нем используются комбинированные квадратичные поперечные и продольные ограничения шины, вычисляемые в режиме реального времени, что потенциально может обеспечить более высокий корректирующий момент рыскания, чем обычно используемый подход с линейными ограничениями, и что его можно адаптировать к любым тяжелым условиям. Комбинация транспортных средств. Этот метод был протестирован и сравнен со стандартной системой контроля устойчивости в трех различных маневрах с использованием тяжелого одиночного тягача на замерзшем озере. Было замечено, что измеренное отклонение от намеченного пути с помощью нового метода уменьшилось до нескольких метров. Также улучшился рейтинг водителя.
Торможение
Электронный контроль устойчивости
Тяжелые автомобили
Рулевое управление
Распределение управления
Фёрфаттаре
Кристоффер К.