Особенности проектирования автомобильных дорог в плане
Проекция оси дороги на земную поверхность образует пространственную кривую — трассу.
Нанося трассу дороги на горизонтальную плоскость, получают изображение (чертеж) дороги в плане.
Обычно, для проектирования дороги в плане пользуются топографическими картами, на которых нанесены ситуация и рельеф окружающей местности.
Прямая линия, кратчайшим путем соединяющая на карте начальный и конечный пункты дороги, называется воздушной.
Практически трасса редко проектируется по воздушной линии. Отступая по ряду причин от воздушной линии, дорога в плане представляет собой более или менее извилистую линию, являющуюся комбинацией прямых и кривых участков (рис. 7).
Прямые участки обеспечивают проектирование дороги в заданном направлении.
Кривые участки (закругления) обеспечивают плавное движение автомобилей в местах примыкания одного прямого участка к другому, где между этими прямыми участками имеется некоторый угол поворота.
Прямые участки характеризуются длиной и румбом участка.
Строительство развязок
Круговые дорожные кривые (закругления) характеризуются углом поворота, радиусом кривизны и длиной кривой.
Рис.7. Трасса дороги в плане и ее составные (прямые и кривые) элементы
Прямые участки обеспечивают проектирование дороги в заданном направлении.
Кривые участки (закругления) обеспечивают плавное движение автомобилей в местах примыкания одного прямого участка к другому, где между этими прямыми участками имеется некоторый угол поворота.
Прямые участки характеризуются длиной и румбом участка.
Круговые дорожные кривые (закругления) характеризуются углом поворота, радиусом кривизны и длиной кривой.
Румбом участка называется угол (в пределах 90°) образуемый нанесенным на топографическую карту прямым участком с географическим меридианом, проходящим через начальную точку участка (рис. 8)
8)
Отсчет румбов ведется от 0 до 90° в одной из последующих четвертей:
северо-западной (СЗ), северо-восточной (СВ), юго-восточной (ЮВ) и юго-западной (ЮЗ).
Рис. 8. Шкала отсчета румбов, служащих для определения направления прямых участков дороги
Рис. 9. Разбивка круговой дорожной кривой
Пример. Наложенный на карту участок обращен направо и вверх, образуя с географическим меридианом угол 80°. Румб r1 этого участка будет СВ : 80°.
Другой участок обращен также направо, но вниз, образуя с меридианом угол 75°. Румб r2 этого участка будет ЮВ:75°.
Угол поворота представляет собой угол, образованный прежним (продолженным) и новым направлением трассы (рис. 9).
Между величиной угла поворота и румбами прямых участков, образующих этот угол, существует закономерная взаимосвязь.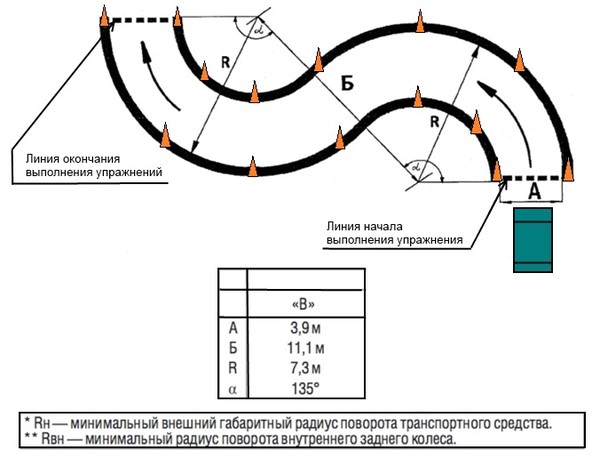 Величину угла поворота можно получить в виде разности, производя геометрическое вычитание угла, соответствующего румбу одного участка, из угла, соответствующего румбу другого, примыкающего участка.
Величину угла поворота можно получить в виде разности, производя геометрическое вычитание угла, соответствующего румбу одного участка, из угла, соответствующего румбу другого, примыкающего участка.
В предыдущем примере, где r1=СВ:80°, а r2=ЮВ:75°, искомый угол поворота будет равен
180- (80 + 75) = 25°
Угол поворота тождествен центральному углу круговой дорожной кривой. Это обусловливается тем, что круговая дорожная кривая вписывается в угол, дополнительный к углу поворота.
Если угол поворота равен , то кривая вписывается в угол .
Длина кривой, как и длина всякой дуги окружности, может быть выражена через величину радиуса кривизны и угла поворота.
, м
Точки начала и конца кривой находятся на равном расстоянии отвершины угла поворота.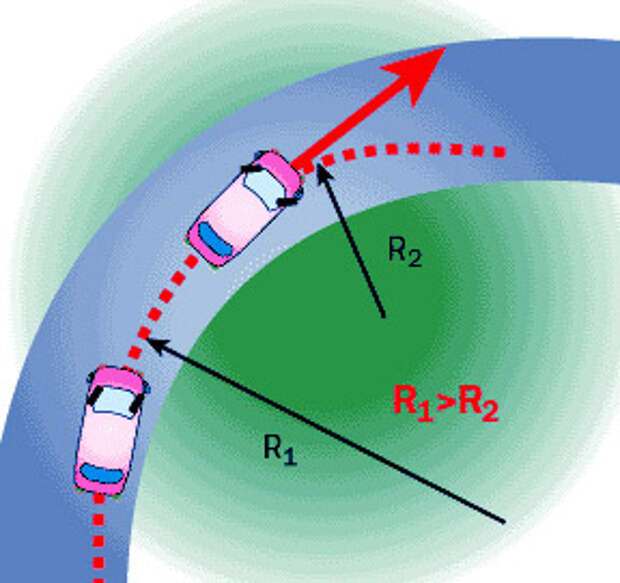 Эти расстояния, откладываемые по касательным к кривой, носят название тангенсов (употребляемый в дорожном деле тангенс измеряется в линейных единицах).
Эти расстояния, откладываемые по касательным к кривой, носят название тангенсов (употребляемый в дорожном деле тангенс измеряется в линейных единицах).
, м
т. е. тангенс круговой дорожной кривой равен радиусу кривой, умноженному на тангенс половины угла поворота.
Сумма двух тангенсов за вычетом длины кривой характеризует сокращение длины трассы в результате разбивки кривой (так называемый домер).
После нанесения трассы дороги в законченном виде на карту (с учетом кривых, вписанных во всех углах поворота или, точнее, в дополнительных к этим углам) трасса разбивается на равные отрезки длиною по 100 м, так называемые пикеты. Пикеты пронумеровывают начиная с нулевого, соответствующего начальной точке участка дороги.
Разбивка пикетажа помогает определить точное местонахождение любой точки на оси дороги; для этого указывается предшествующий порядковый номер пикета плюс количество метров от этого пикета до заданной точки. Так, например, местонахождение точки ПК 27 + 86, значит, данная точка находится на расстоянии 2786 м от начальной точки дороги.
Так, например, местонахождение точки ПК 27 + 86, значит, данная точка находится на расстоянии 2786 м от начальной точки дороги.
При разбивке дорожных кривых необходимо учитывать пределы изменения углов поворота и радиусов кривизны.
Углы поворота подразделяются на углы влево и углы вправо по ходу лежащие; пределы изменения углов поворота от 0 до 180°.
При выборе радиуса кривизны руководствуются категорией дороги.
В интересах улучшения условий движения при разбивке кривых стремятся применять радиусы от 2000 до 5000 м. Однако условия местности не всегда это позволяют, часто приходится уменьшать радиусы, но не ниже предела, установленного в НиТУ 128-55.
Автомобили, двигаясь с самой незначительной скоростью, могут развернуться на кривых значительно меньшего радиуса кривизны, чем нормативные; для большинства отечественных автомобилей этот радиус не превышает 10 м. Эту величину при разбивке дорожных кривых увеличивают в несколько десятков раз исходя из требований безопасности движения.
Центробежная сила С, возникающая при движении автомобиля по кривой, обратно пропорциональна величине радиуса кривизны
Поэтому с уменьшением радиуса возрастает центробежная сила (рис. 10), которая при известных условиях может привести к таким опасным явлениям, как боковой занос автомобиля или даже его опрокидывание.
Рис. 10. Постепенное возрастание центробежной силы по мере уменьшения радиуса круговых дорожных кривых
Вредное действие центробежной силы на отлогих кривых или при небольших скоростях движения нейтрализуется собственным весом автомобиля с учетом величины сцепления его шин с поверхностью дороги
где — коэффициент сцепления, который при поперечном смещении автомобиля несколько меньше, чем при движении в продольном направлении. Для дорог в хорошем состоянии = 0,3-0,4; для мокрых и грязных дорог = 0,1-0,12.
Из последнего уравнения выводится формула взаимозависимости между расчетной скоростью движения и радиусом кривизны
м/сек
Если скорость автомобиля при движении на повороте окажется большей, чем она должна быть при данных R и , то произойдет боковой занос автомобиля. При боковом заносе автомобиль может оказаться на соседней полосе движения, сползти в кювет и даже сделать полный поворот почти на одном месте. При очень высоком коэффициенте сцепления или при наличии какого-нибудь препятствия (например, выступающего трамвайного рельса) боковой занос может не произойти, но в этом случае
При боковом заносе автомобиль может оказаться на соседней полосе движения, сползти в кювет и даже сделать полный поворот почти на одном месте. При очень высоком коэффициенте сцепления или при наличии какого-нибудь препятствия (например, выступающего трамвайного рельса) боковой занос может не произойти, но в этом случае
автомобилю на крутом повороте угрожает опрокидывание.
Опрокидывание автомобиля относительно его продольной оси может произойти, потому что центробежная сила, действуя на плече h, равном высоте расположения центра тяжести автомобиля, создает опрокидывающий момент
(рис.11, а).
Сила тяжести (вес автомобиля) препятствует опрокидыванию, в свою очередь создавая момент
где b — ширина колеи автомобиля, м.
Опрокидывание произойдет, если момент от центробежной силы М1 превысит момент М2 от силы тяжести автомобиля (равенство моментов будет соответствовать состоянию неустойчивого равновесия)
Рис. 11. Моменты сил, возникающие при движении автомобиля на кривой:
11. Моменты сил, возникающие при движении автомобиля на кривой:
а) без виража; б) с виражом
Отсюда может быть выведена вторая формула расчетной скорости движения автомобиля на повороте, устанавливающая соотношение между скоростью, при которой возможно опрокидывание, радиусом кривизны и конструктивными параметрами автомобиля
м/сек
Поскольку на возможность опрокидывания состояние дороги не влияет, а на возможность возникновения бокового заноса не влияют конструктивные параметры автомобиля, расчетную скорость следует определять по обеим формулам. Как правило, при превышении расчетных скоростей боковой занос происходит ранее опрокидывания, но может сопровождаться опрокидыванием. Таким образом, если в исключительных случаях приходится идти на разбивку дорожных кривых радиусом менее нормативного, то движение на этих кривых должно совершаться со скоростями меньшими, чем расчетные, установленные для данной категории дороги.
Руководствуясь интересами безопасности движения, вместо нормального двухскатного поперечного профиля, типичного для прямых участков дорог, на кривых, имеющих радиус кривизны менее 2000 м, прибегают к односкатному профилю с поперечным уклоном, обращенным в сторону центра кривой. Участок дорожной кривой с односкатным поперечным профилем называется виражом (рис. 12).
Кривая, имеющая вираж, допускает более значительную скорость движения (не подвергая автомобиль опасности возникновения бокового заноса), чем кривая того же радиуса, не имеющая виража
м/сек
При наличии виража в некоторой степени ослабляется и опасность опрокидывания, происходит увеличение плеча и уменьшение h (рис. 11, б).
Виражи на дорогах I категории обычно имеют поперечный уклон 0,02-0,04, на дорогах II-III категорий — 0,02-0,06, на остальных дорогах — до 0,10.![]()
Переходный участок, на котором происходит изменение поперечного профиля от двухскатного до односкатного, называется отгоном виража. В плане эти участки обычно имеют форму сложных переходных кривых (например, в виде кубической параболы или радиоиды), что обеспечивает плавность выхода автомобилей с прямой на круговую кривую и обратно.
На кривых малого радиуса в целях лучшего вписывания габаритов подвижного состава в проезжую часть дороги производится уширение проезжей, части сверх норм, установленных для прямых участков.
Уширение делается от 0,40 до 1,40 м за счет внутренней обочины с тем чтобы ее ширина оставалась не менее 1,0 м(в горных условиях не менее 0,5 м).
Страница не найдена
2022 №5, Статьи →
Валиев Азамат Джониевич ФГБОУ ВО «Северо-Кавказский горно-металлургический институт (государственный технологический университет)», Владикавказ, Россия E-mail: azamat99valiev@gmail. com РИНЦ: https://www.elibrary.ru/author_profile.asp?id=1124556 Абаев Заурбек Камболатович ФГБОУ ВО «Северо-Кавказский горно-металлургический институт (государственный технологический университет)», Владикавказ, Россия Доцент Кандидат технических наук E-mail: [email protected] РИНЦ: https://www.elibrary.ru/author_profile.asp?id=756761 Кодзаев Марат …
com РИНЦ: https://www.elibrary.ru/author_profile.asp?id=1124556 Абаев Заурбек Камболатович ФГБОУ ВО «Северо-Кавказский горно-металлургический институт (государственный технологический университет)», Владикавказ, Россия Доцент Кандидат технических наук E-mail: [email protected] РИНЦ: https://www.elibrary.ru/author_profile.asp?id=756761 Кодзаев Марат …
04.12.2022
Читать далее…
2022 №5, Статьи →
Вдовичев Антон Андреевич ФГБОУ ВО «Санкт-Петербургский государственный архитектурно-строительный университет», Санкт-Петербург, Россия Аспирант E-mail: [email protected] ORCID: https://orcid.org/0000-0001-8979-8845 РИНЦ: https://www.elibrary.ru/author_profile.asp?id=995961 Аннотация. Применение современных энергосберегающих технологий является важнейшей задачей в развитии отечественной строительной отрасли. В условиях исчерпания технических решений по снижению энергопотребления в …
04.12.2022
Читать далее.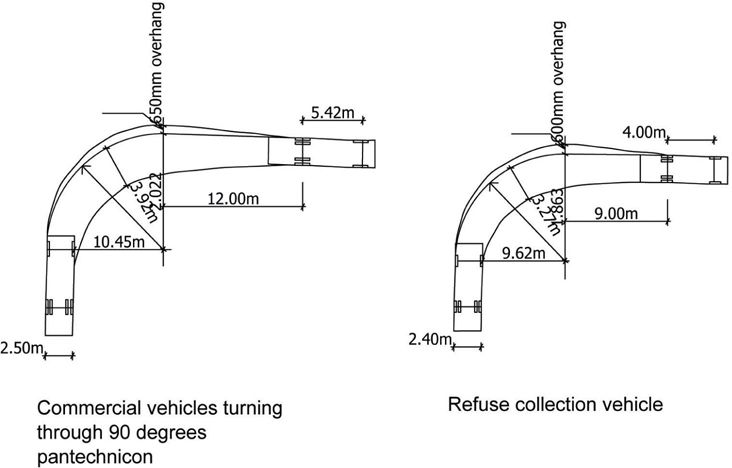 ..
..
2022 №5, Статьи →
Саушева Оксана Сергеевна ФГБОУ ВО «Национальный исследовательский Мордовский государственный университет имени Н.П. Огарёва», Саранск, Россия Доцент кафедры «Теоретической экономики и экономической безопасности» Кандидат экономических наук, доцент E-mail: [email protected] ORCID: https://orcid.org/0000-0003-2901-9584 РИНЦ: https://www.elibrary.ru/author_profile.asp?id=624372 SCOPUS: https://www.scopus.com/authid/detail.url?authorId=55916347600 Моисеева Ирина Владимировна ФГБОУ ВО «Национальный …
04.12.2022
Читать далее…
2022 №5, Статьи →
Чекушина Татьяна Владимировна ФГБУН «Институт проблем комплексного освоения недр имени академика Н.В. Мельникова Российской академии наук», Москва, Россия Ведущий научный сотрудник отдела горной экологии ФГАОУ ВО «Российский университет дружбы народов», Москва, Россия Доцент департамента недропользования и нефтегазового дела Доктор экономических …
04. 12.2022
12.2022
Читать далее…
2022 №6, Статьи →
Гедгафов Залимгери Джабраилович ФГБОУ ВО «Финансовый университет при Правительстве Российской Федерации», Москва, Россия Международный центр развития инноваций и студенческих инициатив Лаборант-исследователь E-mail: [email protected] Аннотация. В данной статье рассматривается вопрос, связанный с классификацией молодежных общественных объединений на базе образовательных организаций для …
02.12.2022
Читать далее…
2022 №5, Статьи →
Кожевников Евгений Борисович ФГБОУ ВО «Алтайский государственный технический университет имени И.И. Ползунова» Рубцовский индустриальный институт, Рубцовск, Россия Старший преподаватель кафедры «Экономика и управление» E-mail: [email protected] РИНЦ: https://elibrary.ru/author_profile.asp?id=758718 Аннотация. Статья посвящена распределению налоговой прибыли и системного (синергетического) налогового эффекта, полученных в …
26. 11.2022
11.2022
Читать далее…
2022 №5, Статьи →
Наумова Ольга Валерьевна ФГБОУ ВО «Саратовский государственный технический университет имени Гагарина Ю.А.», Саратов, Россия Доцент Кандидат технических наук, доцент E-mail: [email protected] РИНЦ: https://www.elibrary.ru/author_profile.asp?id=393383 Катков Данила Сергеевич ФГБОУ ВО «Саратовский государственный технический университет имени Гагарина Ю.А.», Саратов, Россия Доцент Кандидат технических …
26.11.2022
Читать далее…
2022 №5, Статьи →
Кадысева Анастасия Александровна ФГБОУ ВО «Тюменский индустриальный университет», Тюмень, Россия Профессор кафедры «Инженерных систем и сооружений» Доктор биологических наук, доцент E-mail: [email protected] ORCID: https://orcid.org/0000-0001-8703-5684 РИНЦ: https://elibrary.ru/author_profile.asp?id=698088 Глущенко Екатерина Сергеевна ФГБОУ ВО «Тюменский индустриальный университет», Тюмень, Россия Ассистент кафедры «Инженерных систем …
26. 11.2022
11.2022
Читать далее…
2022 №5, Статьи →
Яковлева Ирина Юрьевна ФГБОУ ВО «Национальный исследовательский Московский государственный строительный университет», Москва, Россия Старший преподаватель E-mail: [email protected] РИНЦ: https://elibrary.ru/author_profile.asp?id=998916 Суздалева Антонина Львовна ФГБОУ ВО «Национальный исследовательский Московский государственный строительный университет», Москва, Россия Профессор Доктор биологических наук, профессор E-mail: [email protected] Аннотация. …
25.11.2022
Читать далее…
2022 №5, Статьи →
Захарчук Екатерина Александровна ФГБУН «Институт экономики Уральского отделения Российской академии наук», Екатеринбург, Россия Центр стратегического развития территорий Руководитель Кандидат экономических наук, доцент E-mail: [email protected] ORCID: https://orcid.org/0000-0001-5546-8127 РИНЦ: https://www.elibrary.ru/author_profile.
25.11.2022
Читать далее…
Угол наклона дороги – расчет и потребности дорожного покрытия
- Автор сообщения: Шибашис Гош
- Сообщение опубликовано: 28 января 2012 г.
- Категория должности: Материаловедение
Что такое угол крена?
При повороте дороги вы могли заметить, что внутренняя сторона дороги (или сторона дороги, которая образует внутреннюю часть дуги поворота) имеет меньшую высоту, чем другая сторона дороги. В результате на повороте поверхность дороги не ровная; он наклонен к центру поворота дороги.
Такой наклон при повороте называется креном дороги, а угол наклона дороги при повороте называется углом крена дороги.
Зачем нам банковское дело?
Ну короче за счет центробежной силы. Чтобы объяснить это дальше, скажем, у нас есть дорожный поворот с радиусом поворота R , и поворот не имеет крена или наклона.
Предположим далее, что автомобиль проходит поворот со скоростью V и коэффициент трения между шиной автомобиля и дорогой μ .
При повороте, при отсутствии крена, центробежная сила, развиваемая в автомобиле, должна быть полностью уравновешена силой трения между колесами автомобиля и дорогой.
Дорога без насыпи
Сила трения>=Центробежная сила
μ*M*g =>(M*V 2 )/R
μ(√R <=* или, V g)………………eq.1Где,
M – Масса автомобиля
g – Ускорение свободного падения
Из приведенного выше eq. 1, видно, что для поворот дороги без виража, скорость автомобиля не может быть больше √(μ*R*g).
1, видно, что для поворот дороги без виража, скорость автомобиля не может быть больше √(μ*R*g).
Итак, для облегчения движения на более высокой скорости (выше значения √μ*R*g ) при повороте необходим вираж дороги.
Как рассчитать угол крена дороги
При подпекании дороги в повороте центробежная сила уравновешивается составляющей силы реакции. См. приведенную ниже диаграмму баланса сил для крена дороги:
Расчет угла крена дороги
R1*Cosθ=M*g…………………………………. eq.2
R1*Sinθ=Centrifugal force= (M*V 2 )/R……………… eq.3
By dividing the eq .3 от до экв.2 ,
Tanθ=(V 2 )/(R*g)………………………. eq.4
Таким образом, при крене на повороте дороги за счет увеличения угла крена можно безопасно достичь более высокой скорости проезжающего автомобиля.
Шибашис Гош
Привет, я Шибашис, блоггер по увлечению и инженер по профессии. Я написал большую часть статей для mechGuru.com. Более десяти лет я тесно связан с технологиями инженерного проектирования/моделирования производства. Я самоучка, любитель кода, в настоящее время влюблен в Python (Open CV / ML / Data Science /AWS -3000+ строк, 400+ часов.)
Нравится:
Нравится Загрузка…
Теги: Угол поворота дороги
Накрененные обороты
Поворот по кругу требует, чтобы транспортное средство имело центростремительное ускорение внутрь на повороте, а значит должна быть какая-то центростремительная сила который производит это ускорение. Для автомобиля, движущегося по плоская поверхность, эта сила должна создаваться боковым силы трения на шинах. Это приводит к двум проблемам:- Если коэффициент трения недостаточно высок (скажем, дорога мокрая или обледенелая), то сила трения будет недостаточно, и автомобиль соскользнет с дороги.

- Даже если сила трения достаточно велика, поскольку она действует в нижней части шин он создает чистый момент около центр масс, из-за чего автомобиль может перевернуться над.
Чтобы избежать обеих этих проблем, дорогу можно сделать накренами. внутрь, чтобы внешний край дороги был выше внутренний край. Это называется
На рисунке ниже показан автобус, объезжающий острый угол. на большой скорости по дороге с большим уклоном. Чтобы понять динамика этого автомобиля и конструктивные компромиссы для в поворотах на кренах нужна модель. Мы начнем ниже с простой моделью точечной массы, которой будет достаточно понять трение и скольжение, а затем перейти к 2D тело с твердым телом, чтобы понять поведение по крену.
Сетра Туристический автобус S 411 HD из серии TopClass 400 на Испытательный полигон Mercedes-Benz в Унтертюркхайме. Это 10,16 м в длину модель автобуса относительно компактна и имеет короткие свесы, позволяя ему пересечь острый угол наклона примерно 100 км/ч. Автомобиль оснащен двигателем OM 501 LA V6. развивающий 300 кВт (408 л.с.). Источник изображения: Daimler Global Media Site (изображение в натуральную величину).
Геометрия гусеницы
Понять динамику автобуса выше, нам сначала нужна простая модель геометрии дорога. Спутниковое фото трека показано ниже. автобус был сфотографирован на крайнем левом повороте, который мы можно увидеть примерно полукругом с радиусом около 50 м.
Спутниковый снимок испытательного трека Mercedes-Benz в Унтертюркхайм, на Неккаре Река недалеко от Штутгарта, Германия. Картинка с автобусом выше был сделан в дальнем левом углу, который имеет радиус кривизны около 50 м. Интегрировано с испытательный трек — отличный Mercedes-Benz Музей.
Картинка с автобусом выше был сделан в дальнем левом углу, который имеет радиус кривизны около 50 м. Интегрировано с испытательный трек — отличный Mercedes-Benz Музей.
Чтобы сделать простую модель, давайте рассмотрим трек с прямые сегменты и полукруглые концы, как показано ниже. Если мы автобус, то мы можем увидеть для скорость, ускорение и сила при движении автобуса трек. Мы предполагаем постоянную скорость, поэтому существует только ускорение, когда скорость меняет направление по углам. Эта модель предполагает полукруглая дорожка заканчивается, но это не лучшая идея на практике.
Центростремительное ускорение должно быть вызвано направленным внутрь усилие при поворотах. Чтобы понять величину и источник этой силы, мы теперь рассмотрим простое модель точечной массы.
Модель точечной массы
Рассмотрите автобус как одну точечную массу на пути, в то время как идет за угол. На схеме ниже показана шина спереди, так что внутренняя часть гусеницы находится слева. Мы начнем с предположения, что на дороге нет берега и что автобус стоит. показывает, что сила тяжести \(W\) уравновешивается нормалью сила \(N\) от дороги. Если мы теперь увеличим банк угол \(\theta\) ниже, то мы видим, что сила трения \(F\) по касательной к дороге необходимо, чтобы автобус не скользящий. На практике эта сила будет ограничена \(F \le \mu N\), где \(\mu\) — коэффициент трения. Если мы наклоняем дорожку, пока она не станет почти вертикальной, мы видим, что там потребовалась бы огромная сила трения, но только крошечная нормальная сила доступна. Как бы этого не было можно без приклеивания шин к дороге, это ситуация может привести к тому, что автобус соскользнет вниз к центр дорожки. 9\circ\) и убедитесь, что скорость равна нулю и что видно. Теперь увеличьте скорость автобуса, чтобы получить центростремительное ускорение. Закон Ньютона означает, что существует должна быть сила центростремительного трения, производящая это ускорение. По мере увеличения скорости мы в конечном итоге достичь точки, когда требуемая сила трения слишком велика и автобус будет скользить наружу по трассе.
9\circ\) и убедитесь, что скорость равна нулю и что видно. Теперь увеличьте скорость автобуса, чтобы получить центростремительное ускорение. Закон Ньютона означает, что существует должна быть сила центростремительного трения, производящая это ускорение. По мере увеличения скорости мы в конечном итоге достичь точки, когда требуемая сила трения слишком велика и автобус будет скользить наружу по трассе.
Чтобы избежать скольжения наружу, мы можем увеличить крен на Дорога. Это увеличивает нормальную силу и уменьшает силы трения, что снижает вероятность скольжения. происходить. Для любой заданной скорости существует некоторый угол, который точно отменяет силу трения, так что вся сила является нормальной сила. Это очень безопасная ситуация для вождения, так как нет скольжения. возможно даже на очень скользкой дороге. На реальный трек, угол крена увеличивается как автобус едет выше. Это позволяет водителю выбирать правильный угол наклона для минимизации риска скольжения. Мы можем также показать силы в или как суммарные векторы при изменении угла крена и шины скорость.
Это позволяет водителю выбирать правильный угол наклона для минимизации риска скольжения. Мы можем также показать силы в или как суммарные векторы при изменении угла крена и шины скорость.
Хотя эта простая модель точечной массы позволяет нам понять как вираж на дороге может помочь решить проблему скольжения, это ничего не говорит нам о качке транспортного средства, потому что точечные массы не могут вращаться. Таким образом, нам нужно твердое тело модель для исследования рулона.
2D модель жесткого тела
Теперь мы используем единую модель твердого тела для автобуса и будем делать все в 2D. Ниже мы видим переднюю диаграмму автобус, с внутренней стороны пути налево. Если мы включим , то видим, что вес автобуса равен поддерживается двумя силами, по одной на каждое колесо. Если мы увеличим \(\theta\), то вес больше поддерживается колесо с наклоном вниз, и мы также видим боковые силы трения кажется, чтобы предотвратить скольжение автобуса. Если наклон становится слишком крутой, то нормальная сила на наклонном колесе меняет направление, показывая, что он держит колесо вниз на дорогу. Физически этого произойти не может, поэтому при в этот момент автобус опрокинется. Нам нужно было это твердое тело модель, чтобы понять это поведение опрокидывания, поскольку мы не могли смоделируйте это с точечной массой модель. В зависимости от величины трения коэффициент, автобус может либо скользить, либо катиться первым, как \(\тета\) увеличивается. 9\круг\)
Если наклон становится слишком крутой, то нормальная сила на наклонном колесе меняет направление, показывая, что он держит колесо вниз на дорогу. Физически этого произойти не может, поэтому при в этот момент автобус опрокинется. Нам нужно было это твердое тело модель, чтобы понять это поведение опрокидывания, поскольку мы не могли смоделируйте это с точечной массой модель. В зависимости от величины трения коэффициент, автобус может либо скользить, либо катиться первым, как \(\тета\) увеличивается. 9\круг\)
Скорость автобуса: \(v = \) \(\rm м/с\)
Если мы теперь установим угол крена \(\theta\) обратно в ноль, мы можно начать увеличивать скорость \(v\). Теперь мы видим, что колесо внутри гусеницы берет на себя меньший вес, и силы трения теперь мешают автобусу скользить наружу на трассе. Если автобус едет слишком быстро, то он катиться наружу по дорожке (при условии, что трение коэффициент достаточно высок, чтобы он не скользил первым).
Рассмотрев обе дороги с накатом и стоящим автобусом, и движущегося автобуса по горизонтальной дороге, теперь мы можем объединить чтобы они увидели преимущество наличия дороги с уклоном, когда автобус поворачивает. Выберите скорость шины, а затем измените угол крена \(\theta\), так что сила трения уменьшается (помогая избежать скольжения) и нормальные силы на колеса более сбалансированы (помогает избежать прокатка). Для любой заданной скорости мы можем выбрать угол крена так, что одновременно отсутствует сила бокового трения и также точно сбалансированы нормальные силы. Это самый безопасный банк угол для этой скорости.
Проектирование дорог, путей и рельсов
На прямой дороге центр обычно несколько выше. края, чтобы вода могла стекать. это называется кросс наклон или изгиб. Когда желательно иметь банк поворот, затем внешний край дороги приподнимается, чтобы произвести вираж , внешний край которого возвышается над как центр, так и внутренний край. Угол крена выбирается исходя из радиуса кривизны поворота и ожидаемая скорость автомобилей, проходящих поворот, при этом все еще учитывая тот факт, что автомобили могут двигаться медленно или даже перестал. Таким образом, угол не следует выбирать таким образом, чтобы устранить все силы трения, когда автомобили движутся со скоростью максимальной скорости, так как это было бы опасно, если бы трафик остановиться на дороге.
Угол крена выбирается исходя из радиуса кривизны поворота и ожидаемая скорость автомобилей, проходящих поворот, при этом все еще учитывая тот факт, что автомобили могут двигаться медленно или даже перестал. Таким образом, угол не следует выбирать таким образом, чтобы устранить все силы трения, когда автомобили движутся со скоростью максимальной скорости, так как это было бы опасно, если бы трафик остановиться на дороге.
Велодромы арены с дорожками, предназначенными для скоростных велосипедов гонки, как показано ниже, со скоростью до 85 км/ч. Банк угол на трассах велодрома выбирается таким образом, чтобы свести к минимуму силы на велосипеды, когда они едут на близкой максимальной скорости, поэтому выбранный угол зависит от радиуса искривление углов трассы. Например, Блейн Велодромная трасса, изображенная ниже, имеет длину 250 м и имеет Угол крена 43° по углам и 15° по углам. сразу.
сразу.
Велосипедисты на повороте с креном на Блейне велодром, часть Национального Спортивный центр в Блейне, Миннесота. Источник изображения: фликр пользователь flyinfoto (CC ПО 2.0) (полноразмерный изображение).
Высокоскоростные поезда, такие как французский TGV, курсируют по скорость более 300 км/ч и разгон до до 575 км/ч. Чтобы приспособиться к поворотам на таких скоростях, изгибы пути строятся с большим радиусом кривизны (не менее 7 км для новых путей) и креном до около 7° (максимальный вираж 180 мм со стандартной колея 1435 мм). Для железных дорог вираж знать как косяк.
Альтернативный подход к прохождению поворотов с поездами состоит в том, чтобы оставить гусеницу относительно ровной и наклонить поезд, когда он проходит за угол.