Устройство и работа всережимных регуляторов тракторных дизельных двигателей
На тракторных дизельных двигателях используются только всережимные регуляторы, которые максимально отвечают эксплуатационным требованиям.
Устройство получившего широкое распространение регулятора ТНВД УТН-5 представлено на [рис. 1].
Рис. 1. Всережимный регулятор ТНВД УТН-5.
1) – Сухарь;
2) – Ступица;
3) – Кулачковый вал;
4) – Упорная шайба;
5) – Муфта;
6) – Груз;
7) – Пружина корректора;
8) – Винт корректора;
9) – Рычаг пружины регулятора;
10) – Пружина пускового обогатителя;
11) – Рейка топливного насоса;
12) – Крышка;
13) – Серьга;
14) – Тяга;
15) – Пружина;
16) – Шпилька крепления пружины обогатителя;
17) – Шток корректора;
18) – Шпилька;
19) – Болт номинальной частоты вращения коленчатого вала;
20) – Корпус корректора;
21) – Болт;
22) – Промежуточный рычаг;
23) – Основной рычаг;
24) – Корпус регулятора;
25) – Ось;
26) – Упорный шарикоподшипник;
27) – Бочкообразный ролик;
28) – Сливная пробка;
29) – Рычаг управления;
30) – Пробка;
31) – Горловина;
32) – Болт максимальной частоты вращения коленчатого вала.
Регулятор включает в себя корректор подачи топлива, а также автоматический обогатитель. В корпусе (24) регулятора на оси (25) смонтированы основной (23) и промежуточный (22) рычаги. Основной рычаг соединён через пружину (15) регулятора и рычаг (9) пружины с рычагом (29) управления подачей топлива. Верхняя часть промежуточного рычага (22) соединена с рейкой (11) посредством тяги (14). Смонтированный на промежуточном рычаге корректор топливоподачи состоит из корпуса (20), штока (17), пружины (7) и винта (8). Рычаг (9) связан с промежуточным рычагом посредством пружины (10) обогатителя. Посредством болта (19) номинальной частоты вращения коленвала ограничивается перемещение основного рычага в сторону увеличения подачи, а с помощью винта (18) – регулируется выключение подачи топлива. Болт (21) предназначен для создания требуемого относительного перемещения рычагов. Посредством винта (32) ограничивается поворот рычага (29), а следовательно, и натяжение пружин регулятора. Грузы (6), смонтированные на ступице (2), через упорный подшипник (26) и муфту (5) действуют на промежуточный и основной рычаги. На [рис. 2] показана схема работы регулятора.
На [рис. 2] показана схема работы регулятора.
Рис. 2. Схема работы регулятора.
I – Положение рычагов и грузов при пуске дизельного двигателя;
II – При максимальной частоте вращения коленчатого вала на холостом ходу дизельного двигателя;
III – При номинальной частоте вращения;
IV – При перегрузке дизельного двигателя.
При пуске дизельного двигателя (I) рычаг (29) повёрнут до упора в винт (32). При этом одновременно растягиваются пружины (15) регулятора и (10) обогатителя. Пружиной регулятора основной рычаг прижимается к головке болта (19), тогда как пружина обогатителя перемещает промежуточный рычаг, тягу (14) и рейку (11) до максимальной подачи топлива.
После пуска дизельного двигателя (II) грузы под воздействием центробежной силы расходятся и, преодолевая сопротивление пружин (15) и (10), посредством муфты передвигают промежуточный рычаг, а следовательно и рейку, пока не наступит неподвижное равновесие и установится подача для работы на максимальной частоте холостого хода.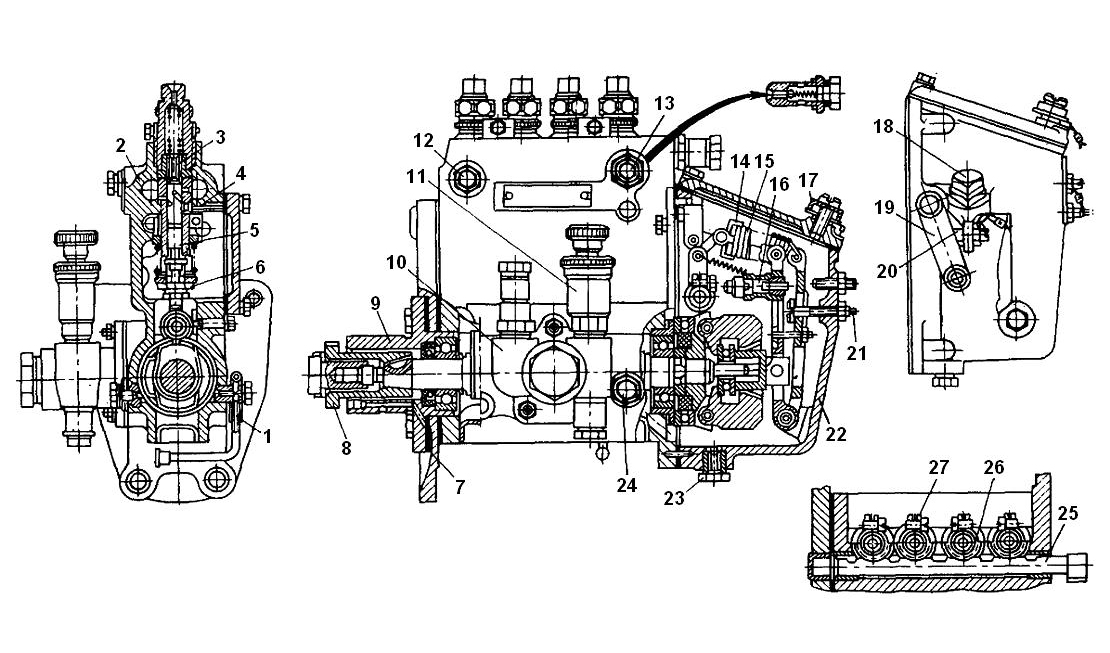
При увеличении нагрузки на дизельный двигатель до номинальной (III) частота вращения коленвала начинает падать, а передаваемое от центробежной силы усилие на промежуточный рычаг через муфту – уменьшается и основной рычаг перемещается до упора в головку болта (19). Промежуточный рычаг передвигается вместе с ним, вследствие чего увеличивает подача топлива, а также достигается номинальный режим работы дизельного двигателя.
При кратковременной перегрузке (IV) и неизменном положении рычага (29) частота вращения коленвала дизельного двигателя резко начинает уменьшаться, а центробежная сила грузов снижается. Резко падает сила их действия на промежуточный рычаг, а пружина (7) корректора выталкивает шток (17) корректора, который упирается в основной рычаг, а промежуточный рычаг перемещается от основного на увеличение цикловой подачи топлива.
Данный режим именуется режимом максимального крутящего момента.
Чтобы остановить двигатель следует переместить рычаг (22) до конца (по ходу часовой стрелки). При этом основной рычаг от усилия пружины (15) перемещается до упора в шпильку (18), а промежуточный рычаг вместе с рейкой передвигается в крайнее положение от центробежной силы вращающихся грузов. Таким образом происходит отключение подачи.
При этом основной рычаг от усилия пружины (15) перемещается до упора в шпильку (18), а промежуточный рычаг вместе с рейкой передвигается в крайнее положение от центробежной силы вращающихся грузов. Таким образом происходит отключение подачи.
Регулятор ТНВД 4ТН-9х10, в сравнении с регулятором ТНВД УТН-5, имеет иную кинематическую схему и конструктивное исполнение, однако его принцип работы аналогичен.
Регулятор ТНВД типа НД [рис. 3] размещён вертикально и в нём имеются три пружины:
1) – пружина (8) регулятора;
2) – пружина (15) корректора;
3) – пружина (3) обогатителя.
Всережимность регулятора достигается за счёт изменения усилия главной пружины.
Рис. 3. Схема действия регулятора ТНВД типа НД.
1) – Дозатор;
2) – Привод дозатора;
3) – Пружина обогатителя;
4) – Болт максимальной частоты вращения;
5) – Упор;
6) – Болт выключателя подачи топлива;
7) – Рычаг управления;
8) – Главная пружина;
9) – Рычаг корректора;
10) – Основной рычаг;
11) – Муфта регулятора;
12) – Груз;
13) – Крестовина грузов;
14) – Демпферная пружина;
15) – Пружина корректора.
В случае перегрузки пружина корректора сжимается и рычаг (10) регулятора поворачивается (против хода часовой стрелки), перемещая вверх дозатор (1).
Разгрузка дизельного двигателя сопровождается увеличением частоты вращения – дозатор движется вниз, а муфта (11) регулятора вверх. Подача топлива снижается. Пружина (14) является в приводе регулятора амортизирующим звеном.
Плунжеры получают вращение посредством цилиндрических шестерён. Как правило, смазывание регулятора и насоса объединено, но и в случае раздельной системы в роли смазочного материала используется моторное масло.
17*
Регуляторы ТНВД дизелей тракторов МТЗ
Всережимный регулятор топливного насоса 773
Для обеспечения надежного пуска в регуляторе (рис. 1) предусмотрено пусковое устройство, которое обеспечивает увеличенную подачу топлива при пуске дизеля
Так как стартовая пружина 31 зацеплена за корпус регулятора (через планку), ее натяжение не зависит от положения рычага управления регулятора 29 (см. рис. 2).
рис. 2).
Если рычаг останова 22 (см. рис. 2) находится в исходном положении под действием возвратной пружины, то рычаги регулятора с рейкой под действием стартовой пружины устанавливаются в положение, соответствующее пусковой подаче топлива независимо от положения рычага управления регулятором.
После запуска дизеля центробежная сила грузов 7 (рис. 1), преодолевая натяжение стартовой пружины, перемещает муфту 8, рычаги регулятора 11, 12 вместе с тягой 30 и рейкой насоса в сторону уменьшения подачи и выключает пусковую подачу топлива.
Рейка насоса автоматически устанавливается снова в положении пусковой подачи только после остановки дизеля и перемещения рычага останова дизеля 22 (см. рис. 2) в исходное положение.
Всережимный регулятор (RV) насоса «Моторпал» (рис. 3)
Держатель грузов 1, с двумя качающимися грузами 2, опирается с помощью муфты 3, запрессованной в подшипник регулирующей втулки, на сухарь или ролик промежуточного рычага 5, который в нижней части шарнирно закреплен на оси 4, а в верхней — соединен с регулирующей рейкой 10 с помощью тяги 11.
Промежуточный рычаг опирается на корректор 6, встроенный в главный рычаг 7 и регулируемый в осевом направлении.
Главный рычаг в нижней части шарнирно закреплен на оси 4 совместно с промежуточным рычагом в корпусе регулятора.
В верхней части он соединен с эксцентриковым валом 14 через тягу 12 и нагрузочную пружину 13.
На эксцентриковом валу установлен наружный рычаг управления, который при повороте натягивает нагрузочную пружину регулятора.
Номинальная частота вращения регулятора (дизеля) задается настройкой упорного болта пальца рычага управления.
Максимальная подача у всережимного регулятора ограничивается регулируемым упором 9, ограничивающим ход главного рычага.
Главный рычаг снабжен корректором 6 и упором с пружиной 8, палец которого отжимает с помощью пружины промежуточный рычаг от главного рычага регулятора.
Эта пружина работает на холостом ходу и служит пружиной автоматического пуска. На холостом ходу работает как нагрузочная пружина, так и пружина в главном рычаге.
Для улучшения пуска, т.е. увеличения пусковой подачи топлива, предусмотрена дополнительная пружина растяжения (на рисунке не показана), которая частично работает и на холостом ходу.
Эта стартовая пружина закреплена одним концом в промежуточном рычаге, а вторым — в рычаге эксцентрикового вала регулятора.
При повороте рычага управления до касания в упорный болт пружина регулируемого упора отжимает промежуточный рычаг от главного и вместе со стартовой пружиной растяжения переводит промежуточный рычаг и регулирующую рейку в положение «Пуск».
Для исключения перегрузки рычажной системы регулятора и механизма регулирования топливного насоса в режиме максимальных оборотов холостого хода служит регулируемый упор 9 в корпусе регулятора, ограничивающий крайние положения промежуточного рычага.
Для обеспечения требуемых характеристик по дымности безнаддувных дизелей Д-242S/243S/244S предусмотрен механический отрицательный корректор топливоподачи, который в диапазоне низких рабочих оборотов обеспечивает снижение количества впрыскиваемого топлива в соответствии со снижающимися оборотами дизеля.
Следовательно, функция механического отрицательного корректора аналогична функции пневматического корректора (ПДК) для дизелей с турбонаддувом.
Всережимный центробежный регулятор насоса 4УТНМ или 4УТНИ (рис. 4)
Работа всережимного центробежного регулятора насоса 4УТНМ или 4УТНИ основана на действии центробежной силы, возникающей при вращении грузов 1.
Они расходятся или сходятся, воздействуя на зубчатую рейку 4 через упорный подшипник 11, рычаги 10, 6 и пружину 5.
При увеличении оборотов дизеля грузы 1 регулятора расходятся и заставляют рейку 4 сдвигаться вправо, т.е. в сторону уменьшения подачи топлива, регулируя скоростной режим.
Наоборот, при уменьшении оборотов под нагрузкой усилие, приложенное к пружине 5, превысит центробежную силу грузов 1, и рейка сдвинется влево — в сторону увеличения подачи топлива до тех пор, пока не наступит баланс сил, и обороты дизеля будут сохраняться на первоначальном уровне, устанавливаемом рычагом 12.
При пуске дизеля (рис. 4, а)рычаг управления регулятором 12 поворачивается до упора в винт 14. Натягиваются одновременно пружина регулятора 5 и пружина обогатителя 13.
Пружина регулятора прижимает основной рычаг 6 к головке болта номинала 8, а пружина обогатителя 13 сдвигает промежуточный рычаг 10 с тягой 15 и рейкой 4 в сторону увеличения (обогащения) подачи топлива.
После пуска дизеля (холостой ход) (рис. 4, б)грузы 1 регулятора под действием центробежных сил расходятся и через упорный подшипник 11 и муфту перемещают промежуточный рычаг 10, преодолевая сопротивление пружин 5, 13.
Промежуточный рычаг через тягу 15 передвигает рейку 4 до тех пор, пока не установится подача холостого хода дизеля.
При работе дизеля под нагрузкой (рис. 4, в)требуемый скоростной режим устанавливается рычагом управления 12.
При повороте рычага в сторону винта 14 растягивается пружина регулятора 5.
При этом рейка 4 перемещается в сторону увеличения подачи. Частота вращения дизеля возрастает до тех пор, пока не уравновесятся центробежные силы грузов 1 и усилие пружины 5, т.е. установится заданный оператором скоростной режим, соответствующий нагрузке.
Частота вращения дизеля возрастает до тех пор, пока не уравновесятся центробежные силы грузов 1 и усилие пружины 5, т.е. установится заданный оператором скоростной режим, соответствующий нагрузке.
При кратковременной перегрузке дизеля (рис. 4, г)и неизменном положении рычага 12 частота вращения коленчатого вала снижается.
Это вызывает уменьшение центробежных сил грузов 1 и перемещение муфты 16 под действием пружины 5 в сторону насоса.
При этом рычаг 10 упирается в головку болта 8, а рычаг 6 под действием пружины корректора 17 перемещается в сторону увеличения подачи топлива, что обеспечивает увеличение крутящего момента дизеля для преодоления перегрузки.
Степень корректировки подачи зависит от выступания штока из корпуса корректора 17 и от затяжки пружины.
При остановке дизеля (рис. 4, д) рычаг 12 перемешается вперед по ходу трактора до отказа. При этом полностью сжатая пружина 5 перемещает рычаг 6 до упора в стенку регулятора.
Центробежная сила вращающихся грузов перемещает рычаг 10 и рейку 4 в крайнее положение, отключая подачу топлива.
При резком увеличении подачи топлива (дизели Д-245/245.5 с турбонаддувом) (рис. 5)
При резком повороте рычага 12 в сторону винта 14 (увеличение подачи) перемещение рычага 6 и рейки 4 сдерживается флажком 18 штока 19 пневмокорректора, соединенного с мембраной 20.
Полость «В» пневмокорректора соединена воздухопроводом с впускным коллектором дизеля после турбокомпрессора.
С увеличением частоты вращения дизеля растет давление в полости «В», что способствует ускорению перемещения рычага 6 и рейки 4.
Медленное увеличение подачи топлива приводит к снижению дымности дизеля.
Всережимный регулятор — частота — вращение
Cтраница 1
Всережимный регулятор частоты вращения предназначен для поддержания постоянной частоты вращения двигателя на любом заданном режиме. [1]
[1]
Всережимный регулятор частоты вращения автоматически поддерживает заданную частоту вращения коленчатого вала изменением ( в зависимости от нагрузки) количества впрыскиваемого в цилиндр топлива. Регулятор дизеля КамАЗ находится в развале корпуса топливного насоса высокого давления и приводится в действие от его кулачкового валика. Во время работы двигателя с частотой вращения коленчатого вала, соответствующей данному положению педали управления подачей топлива, центробежные силы грузов регулятора уравновешены усилием пружины. Если нагрузка на двигатель уменьшится ( например, автомобиль поедет на спуск), то частота вращения коленчатого вала начнет возрастать и грузы регулятора, преодолевая сопротивление пружины несколько разойдутся и. При уменьшении частоты вращения вала относительно той, которая соответствует положению педали управления подачей топлива, центробежная сила грузов уменьшится и регулятор под действием усилия пружины переместит рейку в обратном направлении — подача топлива увеличится, а частота вращения коленчатого вала возрастет до заданного положением педали значения.
| Автоматическая муфта изменения угла опережения впрыска. [3] |
Всережимный регулятор частоты вращения коленчатого вала двигателя установлен на насосе высокого давления и приводится в действие от кулачкового вала. Его работа основана, как и в автоматической муфте, на использовании центробежных сил и протекает следующим образом. [4]
Всережимные регуляторы частоты вращения коленчатого вала дизелей Д50 и 2Д100 по конструкции и принципу работы одинаковы, но они не взаимозаменяемы. В регуляторе дизеля 2Д100 для повышения усилия, создаваемого штоком сервомотора, увеличено давление масла в системе регулятора с ( 3 5 — — 4 0) 105 Па ( Д50) до ( 6 6 — — 7 5) 105 Па за счет большей высоты зубчатых колес масляного насоса и усиления пружин аккумулятора. В регуляторе дизеля 2Д100 также уменьшен диаметр компенсирующего поршня и усилена пружина силового поршня. Вал привода регулятора дизеля 2Д100 связан с приводом шлицевым соединением, а на дизелях Д50 — с помощью конических зубчатых колес.
[5]
Вал привода регулятора дизеля 2Д100 связан с приводом шлицевым соединением, а на дизелях Д50 — с помощью конических зубчатых колес.
[5]
Всережимный регулятор частоты вращения коленчатого вала двигателя установлен на насосе высокого давления и приводится в действие от кулачкового вала. Его работа основана, как и в автоматической муфте, на использовании центробежных сил и протекает следующим образом. [6]
| Схема работы регулятора при увеличении частоты вращения. [7] |
Устроен всережимный регулятор частоты вращения ( рис. 67) следующим образом. Корпус 7 регулятора закреплен болтами непосредственно к корпусу насоса высокого давления. Внутри корпуса расположены повышающая передача, центробежные грузы и система рычагов и тяг, связывающая регулятор с рычагом подачи и зубчатой рейкой управления плунжерами насоса. [8]
Устроен всережимный регулятор частоты вращения ( рис. 69) следующим образом. Корпус 7 регулятора закреплен болтами непосредственно к корпусу насоса высокого давления.
[9]
69) следующим образом. Корпус 7 регулятора закреплен болтами непосредственно к корпусу насоса высокого давления.
[9]
Как устроен и работает всережимный регулятор частоты вращения
. [10]К корпусу насоса прикреплен корпус 24 всережимного регулятора частоты вращения коленчатого вала двигателя соответственно положению педали подачи топлива при различной нагрузке. Кроме того, всережимный регулятор устанавливает минимальную угловую скорость коленчатого вала на режиме холостого хода и ограничивает максимальную частоту вращения. [11]
При ежедневном техническом обслуживании перед пуском проверяют осмотром общее состояние двигателя, наличие топлива в баке, уровень масла в насосе высокого давления и всережимном регуляторе частоты вращения коленчатого вала. [12]
Перебои и неравномерность в работе цилиндров двигателя связаны с нарушением равномерности подачи нагнетательными секциями насоса, отклонениями в регулировке форсунок, зависанием нагнетательных клапанов, ослаблением соединений трубопроводов высокого давления, неисправностями всережимного регулятора частоты вращения коленчатого вала
 [13]
[13]| Схема работы насоса низкого давления. [14] |
Количество впрыскиваемого топлива изменяется поворотом плунжера вокруг его оси с помощью зубчатой рейки. Положением рейки управляют через всережимный регулятор частоты вращения, который связан с педалью управления подачей топлива в кабине водителя. [15]
Страницы: 1 2
Всережимный регулятор оборотов дизельного двигателя
Это происходит вследствие сокращения времени прохождения плунжером окон втулки и соответственно сокращения количества вытесняемого топлива из надплунжерного пространства через эти окна. Кроме того, регулятор опережения впрыска топлива при увеличении оборотов корректирует начало подачи и, таким образом, обороты двигателя прогрессирующе возрастают.
Данное явление тем более характерно, чем меньше активный ход плунжера. Возрастание цикловой подачи приводит к дальнейшему росту частоты вращения клеенчатого вала, и если нагрузка не увеличится, то это может привести к «разносу» двигателя (саморазрушению)
Увеличение внешней нагрузки двигателя и снижение вследствие этого частоты вращения коленчатого вала, наоборот, приводит к увеличению количества перетекающего топлива в окна втулки и соответственно к сокращению поданного количества топлива через штуцер к форсунке. Поэтому дизели при возрастании внешней нагрузки склонны к останову.
Поэтому дизели при возрастании внешней нагрузки склонны к останову.
Водитель не всегда может среагировать на колебания нагрузки, поэтому данную функцию выполняют специальные следящие устройства – регуляторы частоты вращения, предназначенные для автоматического поддержания частоты вращения коленчатого вала в заданных пределах.
Регуляторы частоты вращения классифицируют:
- по воздействию на орган управления – прямого и непрямого действия;
- по поддержанию заданного режима – одно-, двух- и всережимные.
Регуляторы прямого действия воздествуют непосредственно на орган управления подачей топлива (рейку ТНВД или дроссельную заслонку карбюратора). Регуляторы непрямого действия воздействуют на них через дополнительную систему – электрический или гидравлический усилитель.
Однорежимные регуляторы поддерживают только один скоростной режим, чаще всего максимальный, не позволяя двигателю превышать предельно допустимые обороты и работать вразнос.
На автомобильных двигателях регуляторы должны ограничивать, как минимум, максимальную и минимальную частоты вращения коленчатого вала. Такие регуляторы называются двухрежимными. На отечественных дизелях используются всережимные регуляторы частоты вращения, которые автоматически поддерживают заданную водителем частоту вращения коленчатого вала на всем диапазоне нагрузок.
Такие регуляторы называются двухрежимными. На отечественных дизелях используются всережимные регуляторы частоты вращения, которые автоматически поддерживают заданную водителем частоту вращения коленчатого вала на всем диапазоне нагрузок.
***
Всережимный регулятор частоты вращения
Всережимные регуляторы частоты вращения устанавливаются на двигателям марок «ЯМЗ», «КамАЗ», двигателе ММЗ Д-235.12 (автомобиль ЗИЛ-5301 «Бычок»).
На рисунке 1 приведена конструкция регулятора двигателя ЯМЗ-238 и схема его работы.
Данный регулятор устанавливается на заднем торце топливного насоса высокого давления (ТНВД).
Ведущее зубчатое колесо 1 регулятора приводится во вращение от кулачкового вала топливного насоса через резиновые сухари 27, которые в ней установлены.
Резиновые сухари поглощают ударные нагрузки при резком изменении частоты вращения. Ведомое зубчатое колесо 3 установлено в корпусе 4 на двух шариковых подшипниках.
Ведущее и ведомое зубчатые колеса образуют повышенную передачу с целью увеличения чувствительности регулятора.
На осях державки шарнирно закреплены два грузика 29, которые своими роликами упираются в торец муфты 26, которая через радиально-упорный подшипник и пяту 25 передает усилие силовому рычагу 19, подвешенному на оси 13.
Пята регулятора с помощью рычага 20 и тяги 11 связана с рейкой 6 топливного насоса, которая при расхождении грузиков перемещается в сторону уменьшения подачи топлива.
В верхней части к рычагу 20 присоединена пружина 8, а в нижней части рычага запрессован палец 23, который входит в паз кулисы 24.
Кулиса соединяется со скобой 21 останова двигателя через распложенную внутри кулисы пружину, предохраняющую механизм регулятора от чрезмерных усилий при выключении подачи топлива.
Пружина 14 регулятора одним концом соединена с рычагом 12, который жестко связан с рычагом 9 управления регулятором, а вторым – с двуплечим рычагом 15. Усилие пружины передается с двуплечего рычага на винт 16.
Регулятор работает следующим образом. При вращении кулачкового вала ТНВД и валика с державкой 5 центробежная сила грузиков 29 стремится развести их в стороны и через ролики 30 переместить муфту 26 с пятой 25 вправо.
Этому препятствует пружина 14, которая тянет нижнее плечо рычага 15 вверх и через винт 16 и рычаг 19 отжимает пяту 25 влево.
Таким образом, на муфту 26 и пяту действует две силы: направленная вправо центробежная сила грузиков и направленная влево сила, создаваемая пружиной 14.
При определенном натяжении пружины развивается частота вращения, при которой эти две силы взаимно уравновешиваются. Тогда все подвижные детали регулятора (грузики, муфта, пята, рычаги 15, 19 и 20, тяга 11), а также рейка 6 и плунжеры занимают положение, обеспечивающее работу двигателя с заданной частотой вращения.
Если нагрузка на двигатель уменьшится (например, при движении автомобиля под уклон), частота вращения коленчатого вала начнет возрастать и увеличивающаяся сила грузиков передвигает муфту с пятой вправо (при этом пружина, натянутая водителем через рычаги 9 и 12, еще больше растянется).
Пята повернет рычаг 20 по часовой стрелке, и тяга 11 выдвинет рейку из корпуса ТНВД, рейка повернет плунжеры, и подача топлива уменьшится, что приведет к уменьшению частоты вращения коленчатого вала двигателя.
Если нагрузка увеличится (автомобиль движется на подъем или по труднопроходимому участку местности), частота вращения коленчатого вала начнет падать и вместе с тем уменьшаться центробежная сила грузиков, а так как сила натяжения пружины заданная водителем остается неизменной, то ее усилия становится достаточно, чтобы передвинуть рейку ТНВД в сторону увеличения подачи топлива. В результате увеличения подачи топлива частота вращения коленчатого вала сохраняется и будет таким образом поддерживаться постоянной при заданном водителем через педаль управления положении рейки насоса.
Водитель может по своему усмотрению изменить частоту вращения коленчатого вала, а значит, и скорость движения автомобиля с помощью педали управления подачей топлива, установленной в кабине.
При нажатии на педаль система тяг и рычагов перемещает тягу 28 влево, рычаг 9 поворачивает валик с рычагом 12 против часовой стрелки и сильнее натягивает пружину 14.
Усилием пружины детали 15 и 19 перемещают пяту 25 и рычаг 20 влево, и рейка перемещается влево (в сторону увеличения подачи топлива), в результате чего частота вращения увеличивается.
Когда водитель освобождает педаль подачи топлива полностью, двигатель работает на режиме холостого хода. Натяжение пружины 14 регулятора на этом режиме регулируется винтами 16 и 17.
Чтобы заглушить двигатель, водитель должен вытянуть кнопку «стоп», расположенную в его кабине. Тогда трос, на конце которого закреплена кнопка, повернет скобу 21 с кулисой 24 в положение, показанное на рис.
2, б штрихпунктирной с двумя точками линией, а кулиса поворачивает рычаг 20 вокруг его оси, закрепленной в пяте 25.
Нижний конец рычага 20 переместится влево, верхний конец его переместит рейку еще немного назад и подача топлива в цилиндры прекратится.

***
Регулятор ТНВД серии 33
Регулятор насоса серии 33 (двигатель КамАЗ-740) скомпонован в развале секций насоса (внешний вид регулятора КамАЗ-740 на рисунке в верху страницы). Привод вала регулятора – от вала насоса через три шестерни, ведущая из которых соединена с валом насоса через резиновые сухари.
На валу регулятора отлита крестовина 2 (рис. 3), на котором шарнирно закреплены двуплечие рычаги с грузами 3. Одни из плеч рычагов упираются в муфту 4, а она – в промежуточный рычаг 5, управляющий верхней рейкой 1. Этот рычаг установлен на одном шарнире с главным рычагом 6, на который воздействует главная пружина 9.
Рейка нижнего (левого) ряда перемещается коромыслом 18 в обратную сторону. Регулятор имеет корректор и пружину обогатителя. Работа этого регулятора (рис. 3, в) аналогична работе рассмотренного выше всережимного регулятора двигателя ЯМЗ-238.
Работа этого регулятора (рис. 3, в) аналогична работе рассмотренного выше всережимного регулятора двигателя ЯМЗ-238.
***
Двухрежимный регулятор частоты вращения
Особенностью двухрежимного регулятора частоты вращения (рис. 2) заключается в том, что при работе дизеля на малых частотах вращения коленчатого вала грузики 6 уравновешиваются только внешней пружиной 2.
Любое изменение частоты вращения нарушит равновесие между центробежной силой грузиков 6 и усилием пружины 2, что приведет к перемещению муфты 5 и рейки 4 в сторону увеличения или уменьшения подачи топлива.
В результате частота вращения будет удерживаться в заданном диапазоне.
При переходе на режим частичных нагрузок водитель, воздействуя на педаль управления подачей топлива, увеличивает частоту вращения коленчатого вала. При этом грузики расходятся и, преодолевая сопротивление внешней пружины, доводят муфту 5 до соприкосновения с внутренней пружиной 3.
Однако пружина 3 имеет значительную жесткость и установлена с предварительной деформацией, поэтому в дальнейшем регулятор исключается из работы, так как грузики не могут преодолеть совместное сопротивление двух пружин, а перемещение рейки ТНВД происходит непосредственно под воздействием водителя на педаль, систему тяг, рычага 1 и рейки 4.

При достижении предельной частоты вращения центробежной силы грузиков становится достаточно для преодоления сопротивления пружин, и регулятор снова включается в работу.
В результате муфта 5 и рейка 4 перемещаются в сторону уменьшения цикловой подачи топлива.
На рис. 4 показан двухрежимный регулятор частоты вращения, устанавливаемый на двигателе ЗИЛ-645. Регулятор обеспечивает устойчивую работу на холостом ходу при частоте вращения коленчатого вала 600…650 об/мин.
Регулятор имеет два цилиндрических пустотелых грузика 13, установленных на крестовине 14. Внутри каждого грузика находятся пружины: наружная пружина для ограничения частоты вращения холостого хода и внутренняя для ограничения максимальной частоты вращения; тарелки 20 пружин с регулировочной гайкой.
При неподвижном коленчатом вале грузики прижаты пружинами к крестовине. Во время вращения коленчатого вала грузики под действием центробежных сил расходятся, сжимая наружную пружину. При этом угловой рычаг 10 перемещает ползун 9 углового рычага влево, который при помощи оси 8 кулисы выдвинет рейку насоса вправо, уменьшая подачу топлива и ограничивая частоту вращения коленчатого вала.
При этом угловой рычаг 10 перемещает ползун 9 углового рычага влево, который при помощи оси 8 кулисы выдвинет рейку насоса вправо, уменьшая подачу топлива и ограничивая частоту вращения коленчатого вала.
Если частота вращения коленчатого вала станет меньше 650 об/мин, регулятор начнет задвигать рейку, увеличивая подачу топлива. Таким образом, на холостом ходу ползун непрерывно перемещается, вследствие чего изменяется подача топлива и поддерживается заданная частота вращения.
При достижении частоты вращения 2850 об/мин центробежная сила грузиков начнет преодолевать сопротивление пружин, под действием системы рычагов рейка перемещается, уменьшая подачу топлива и частоту вращения коленчатого вала.
На этом режиме ползун также перемещается, в результате чего частота вращения составляет 2850…2950 об/мин.
Между минимальным и максимальным значениями частоты вращения изменение подачи топлива осуществляется рычагом управления подачей топлива, связанным с педалью подачи топлива.
***
Система подачи воздуха, наддув и дымовой корректор
Главная страница
Дистанционное образование
- Группа ТО-81
- Группа М-81
- Группа ТО-71
Специальности
Учебные дисциплины
Олимпиады и тесты
Регуляторы частоты вращения — однорежимный, всережимный
Однорежимный регулятор двигателя 6 ДР 30/50 (рис. 139)—прямого действия — состоит из двух грузов 2, шарнирно закрепленных с помощью шарниров 3 на шестерне 1 распределительного вала и стянутых пружиной 5.
Внутренние плечи грузов через штыри 4 воздействуют на муфту 15 и через упорный шарикоподшипник 14—на обойму 13. С другой стороны, обойма испытывает усилие сжатой пружины 12. Через рычаг 9 перемещение обоймы передается на пружинную связь 8.
Тяга 6 топливных насосов связана через ролик с сектором рукоятки поста управления (на рис. 139 не показано).
При вращении за счет центробежной силы грузы расходятся и, преодолевая силу упругости пружины 12, перемещают обойму 13 вправо.
Если частота вращения двигателя ниже предельной, то благодаря зазору h между внутренним торцом пружинной связи 8 и упором тяги 7 регулятор не оказывает влияния на положение тяги 6 топливных насосов.
Когда частота вращения достигнет предельной, зазор h будет выбран и регулятор начнет воздействовать на топливную тягу, перемещая ее влево в направлении уменьшения подачи топлива.
Предельную частоту вращения, ограничиваемую регулятором, можно изменять величиной затяга пружины 12, что достигается поворотом маховика 11, перемещающего шпиндель 10.
Всережимный регулятор двигателя 6Ч24/36 (рис. 140) — прямого действия. В корпусе 12 в подшипниках вращается вертикальный вал 1, приводимый в движение через передаточные шестерни 20 и 2 от распределительного вала.
Два груза 18 закреплены в крестовине на осях 19 и внутренними плечами, при помощи упоров 5, нажимают на втулку 4, свободно перемещающуюся вдоль вертикального вала 1. Перемещение втулки 4 через радиально-упорный подшипник 17 передается на муфту 5. С противоположной стороны муфта воспринимает усилие пружин 6, верхние концы которых упираются в тарелку 14.
С противоположной стороны муфта воспринимает усилие пружин 6, верхние концы которых упираются в тарелку 14.
Закрепленный на муфте 5 направляющий стакан 16 через вилку и валик связан с рычагом 15, конец которого воздействует на тягу топливных насосов.
При возрастании частоты вращения грузы через втулку 4 и муфту 5 действуют на пружины 6, сжимая их. Направляющий стакан 16 поднимается и через рычаг 15 перемещает топливную тягу в направлении уменьшения подачи топлива.
При повышении нагрузки, и, следовательно, понижении частоты вращения сила упругости пружин преодолевает центробежную силу грузов, направляющий стакан 16 опускается и рычаг 15 воздействует на рейку топливных насосов, увеличивая подачу топлива.
Частота вращения, которую регулятор должен поддерживать, задается изменением затяга пружин 6.
Это достигается поворотом маховика 11 и с ним шестерни 13, которая поворачивает шестерню 7 с удлиненной втулкой. Шестерня 7 зафиксирована в корпусе и осевого перемещения не имеет.
Расположенный внутри нее на резьбе шпиндель 10 при вращении шестерни 7 получает осевое перемещение, что изменяет затяг пружин 6.
Максимальная частота вращения, на которую можно настроить регулятор, ограничивается закрепленным на шпинделе установочным кольцом 9, минимальная частота вращения—регулировочным болтом 8.
Всережимно-предельный регулятор двигателя 7ДКРН 70/120 (рис. 141) — непрямого действия — приводится в движение через шестерню 6 вала топливных насосов. Шестерня 6 соединена со ступицей 5 регулятора через эластичную муфту 4. На ступице расположены грузы 7, внутренние плечи которых соединены с чекой 1 шпинделя 2.
Под действием центробежных сил грузы 7 через чеку 1, шпиндель 2 и упорный шарикоподшипник 3 могут передвигать поршень 18 вправо. Давление на поршень уравновешивается пружинами, натяжение которых регулируется маховиком 17.
При своем движении поршень 18 через ушко 16 и двуплечий угловой рычаг перемещает золотник 15, имеющий две отсечные кромки 11 и 12 (на рисунке поле золотника зачернено). Золотник 15 плотно входит в центральное отверстие поршня сервомотора 13 с удлиненной ступицей, который имеет окна, перекрывающиеся кромками 11 и 12 золотника.
Золотник 15 плотно входит в центральное отверстие поршня сервомотора 13 с удлиненной ступицей, который имеет окна, перекрывающиеся кромками 11 и 12 золотника.
Через маслоподводящую трубу 14, кольцевой канал а и отверстия в ступице поршня 13 масло подводится под нижнюю отсечную кромку 12 золотника 15.
При возрастании частоты вращения двигателя центробежная сила грузов преодолевает силу упругости пружины и поршень 18, перемещаясь вправо, поднимает золотник 15. Через образующуюся щель между нижней кромкой 12 золотника и нижними кромками окон поршня 13 масло поступает в полость «в» и перемещает поршень 13 вверх.
Масло из пространства над поршнем сливается по трубе 8. Поршень остановится, когда нижние кромки его окон совпадут с нижней кромкой 12 золотника, и поступление масла в полость «в» прекратится.
При снижении частоты вращения золотник перемещается вниз, открывая щель между своей верхней кромкой 11 и верхними кромками окон поршня. Масло из полости «в» перетекает в пространство над поршнем, и он опускается. Движение поршня вниз прекратится, когда верхние кромки его окон совпадут с верхними кромками золотника.
Движение поршня вниз прекратится, когда верхние кромки его окон совпадут с верхними кромками золотника.
Таким образом, перемещение поршня сервомотора равно величине перемещения золотника, или, как говорят, поршень «следит» за золотником.
При своем движении вверх (в случае возрастания частоты вращения) поршень сервомотора 13 через толкатель 9 может воздействовать на ролик 19, сидящий на пальце 10 рычага 20, и поворачивать его по часовой стрелке. Это приведет к перемещению тяги 21 вниз и через поворотный валик и систему рычагов (на рисунке не показаны) — к уменьшению подачи топлива.
При нормальных условиях эксплуатации регулятор действует как предельный и управление подачей топлива производится маховиком, с поста управления. Если частота вращения меньше предельной, то между толкателем 9 и роликом 19 имеется зазор.
По мере увеличения частоты вращения двигателя этот зазор уменьшается, и при достижении предельной частоты вращения толкатель упрется в ролик.

Дальнейшее увеличение частоты вращения происходить не будет, так как поршень 13, поднимаясь вверх, станет опускать через рычаг 20 тягу 21 в сторону нулевой подачи.
При плавании судна на волнении регулятор включают по схеме всережимного. Для этого сначала уменьшают маховиком с поста управления количество подаваемого топлива и устанавливают между толкателем 9 и роликом 19 специальную проставку.
Затем на посту управления увеличивают подачу топлива до номинального значения (по нагрузке) и несколько ослабляют маховиком 17 затяг пружин регулятора.
Этим устанавливается пониженная частота вращения двигателя, которая поддерживается регулятором при плавании судна в штормовых условиях.
Всережимный регулятор с ограничением по нагрузке и по задаваемым и фактическим оборотам Р13М-2КЕ (рис.
142) — непрямого действия разработан Центральным научно-исследовательским дизельным институтом (ЦНИДИ) и применяется в судовых установках с главными дизелями типа ДР 43/61-1 и ДР 30/50-3.
Этот регулятор отвечает- всем требованиям, предъявляемым к регуляторам, используемым в системах дистанционного автоматизированного управления двигателями.
Привод регулятора осуществляется посредством приводного валика 1, который передает вращение через шестеренную пару 2, упругую муфту 5 и верхнюю шестеренную пару чашке измерителя 6. Упругая муфта 5 служит для гашения резких колебаний частоты вращения, благодаря чему второй зубчатой шестерне верхней пары, выполненной заодно с чашкой 6, они не передаются.
Измерительное устройство представляет собой два груза 7, шарнирно закрепленных в чашке 6. Внутренние плечи грузов через упорную тарелку и упорный шарикоподшипник воздействуют на нижнюю тарелку пружины измерителя 8.
Нижняя тарелка пружины соединена со шпинделем, проходящим свободно через сухарь 18. На верхнем конце шпинделя закреплена упорная тарелка 34, с помощью которой действует механизм ограничения нагрузки.
К упорному шарикоподшипнику присоединен золотник 9 с двумя рабочими полями, проходящий через отверстие в ступице чашки 6.

Задающее устройство — пружина 8. При задании нового режима изменение затяга пружины осуществляется поворотом валика управления 24 через каретку 23 и сухарь 18.
Источник вспомогательной энергии — масляный насос, состоящий из шестеренной пары 2 и двух всасывающих и двух нагнетательных шариковых клапанов 3. Наличие двух пар клапанов обеспечивает работу регулятора при реверсе двигателя.
Масло засасывается из ванны и подается по каналам в полость над поршнем сервомотора 10 к верхнему полю золотника 9 и в два аккумулятора 4 (на рисунке показан один).
Каждый аккумулятор представляет собой цилиндр с подпружиненным поршнем, который при повышении давления масла выше 8 бар открывает сливное отверстие «а».
Гидравлический сервомотор состоит из цилиндра с поршнем 10, перемещение которого управляется золотником 9. (вверху на кольцевую площадь поршня непрерывно воздействует давление масла. При подъеме золотника 9 масло от насоса направляется под поршень 10 и поднимает его.

При опускании золотника масло из-под поршня сливается в ванну, и за счет давления масла на верхнюю кольцевую площадь поршень опускается.
Перемещение поршня 10 через продольный вал 11, пару конических полушестерен и поперечный вал 12 передается тяге 13, управляющей топливными насосами.
Жесткая обратная связь состоит из рычага на продольном валу 11, шатуна 15, ролика с валиком 16 и вильчатого рычага 17, который связан с сухарем 18, воздействующим на затяг пружины 8.
Положение профильной части шатуна 15, соприкасающейся с роликом, можно изменять, чем достигается необходимая степень неравномерности (статическая ошибка) — от 0 до 6%.
Регулируется степень неравномерности винтом с указателем 35, который при повороте червячной шестерни разворачивает эксцентрично сидящий на ее ступице правый конец шатуна 15. В результате этого под ролик подводится другой участок профиля шатуна.
Гибкая обратная связь состоит из цилиндра с поршнем изодрома 20, иглы 21, корректора 22 и масляной полости, образуемой каналами между поршнем 20, корректором 22 и золотником 9.
Поршень 20 при помощи подпоршневой пружины постоянно прижат к пальцу 19 продольного вала 11. Игольчатым клапаном 21 регулируется время изодрома.
В случае значительного возрастания давления (или разрежения) в полости изодрома корректор 22 сообщает ее с масляной ванной.
Механизм, ограничения нагрузки состоит из: углового рычага с плечами 32 и 33, толкателя 31, шестерен 28, 29, 30 и находящихся с ними в зацеплении секторов с указателями 25, 26, 27, а также сектора 14.
Каждое положение сектора 14, насаженного на продольный вал 11, соответствует определенной подаче топлива. Одновременно с изменением регулятором подачи топлива через сектор 14 поворачивается шестерня с указателем нагрузки 25.
Эта шестерня посредством закрепленного на ней зубчатого сектора разворачивает шестерню 30, в ступицу которой упирается кольцевой бурт толкателя 31. Положение шестерни 30 всегда соответствует количеству подаваемого насосами топлива.
При изменении скоростного режима валиком 24 поворачивается каретка 23.
Закрепленный на ней зубчатый сектор через валик с шестернями поворачивает вертикальный сектор с указателем 26.
Одновременно через другой зубчатый сектор поворачивается шестерня 29, положение которой соответствует подаче топлива, допускаемой для данного скоростного режима.
Стрелка указателя 26 показывает величину этой подачи.
Максимальная нагрузка, выше которой при любом скоростном режиме работа дизеля не допускается, задается определенным положением шестерни 28. Величину этой нагрузки показывает указатель 27, который закреплен на секторе, находящемся в зацеплении с шестерней 28.
Шестерня 29 свободно насажена на ступицу шестерни 28. У обоих этих шестерен на торцах, обращенных к шестерне 30, имеются выступы. Подобный выступ имеется на торце шестерни 30.
Работа регулятора при увеличении частоты вращения происходит следующим образом.
Грузы 7, преодолевая силу упругости пружины 8, поднимают золотник 9. Масло от насоса поступает в полость под поршнем сервомотора 10 и перемещает его вверх, за счет чего тяга 13 передвигается в направлении уменьшения подачи топлива.
Одновременно поднимается поршень изодрома 20.
В полости под этим поршнем, а значит и под золотником 9, создается разрежение, препятствующее перемещению золотника вверх. Этому может способствовать также и жесткая обратная связь (при степени неравномерности более 0%), которая через рычаг 17 несколько увеличивает затяг пружины 8.
По истечении не которого времени (время изодрома) за счет перетекания масла через игольчатый клапан 21 давление в полости изодрома сравняется с атмосферным, и гибкая связь перестанет воздействовать на золотник 9.
К концу переходного режима золотник 9 займет исходное положение и перемещение поршня 10 прекратится. При нулевой степени неравномерности частота вращения восстановится до первоначального значения, при степени неравномерности более 0% — соответственно повысится .
В случае понижения частоты вращения регулятор будет действовать в обратном направлении, увеличивая подачу топлива.
Если при этом нагрузка возрастет до значения, заданного механизмом ограничения, то шестерня 30, упираясь своим выступом в выступ соответствующей шестерни (28 или 29), начнет перемещаться вдоль своей оси влево и передвигать толкатель 31.
Толкатель 31 через рычаг 32 и вильчатый рычаг 33 поднимет упорную тарелку 34. Это позволит грузам 7 поднять золотник 9 и направить масло под поршень сервомотора 10, который, перемещаясь вверх, будет передвигать тягу 13 в направлении уменьшения подачи топлива.
Назначение, конструкция и принцип действия регулятора частоты вращения коленчатого вала
Регуляторы частоты вращения. Для поддержания заданной частоты вращения коленчатого вала необходимо изменять подачу топлива соответственно изменению нагрузки. При возрастании нагрузки частота вращения уменьшается и подачу топлива для поддержания заданной частоты вращения следует увеличить, иначе двигатель может остановиться.
При понижении нагрузки частота вращения увеличивается и подачу топлива надо уменьшить, иначе значительно повысится частота вращения и двигатель пойдёт «вразнос». Для автоматизированного изменения подачи топлива в соответствии с изменением нагрузки на двигателях устанавливают регуляторы частоты вращения.
Автоматическое регулирование подачи топлива в цилиндры двигателя производится центробежным регулятором, который воздействует на рейки топливных насосов. Воздействие может быть непосредственным (регуляторы прямого действия) и с помощью вспомогательного механизма (регуляторы непрямого действия).
Вспомогательным исполнительным механизмом, усиливающим действие регулятора, является сервомотор, обычно гидравлического типа.
Регуляторы прямого действия применяют во всех дизелях мощности и частично средней мощности. Они просты в изготовлении и обеспечивают регулирование подачи топлива в цилиндры двигателя.
В настоящее время для дизелей большой мощности используют исключительно регуляторы непрямого действия, которые также широко применяют на дизелях средней мощности.
Они обладают лучшими характеристиками, универсальны и более удобны для комплектования дополнительными автоматическими устройствами, необходимыми для организации системы автоматизированного управления.
По назначению и предъявляемым техническим требованиям регуляторы частоты вращения подразделяют на однорежимные, двухрежимные и всережимные.
Однорежимные регуляторы служат для поддержания заданной частоты вращения коленчатого вала двигателя при любом изменении нагрузки и применяются в основном в двигателях, работающих при постоянной частоте вращения коленчатого вала.
Двухрежимные регуляторы предназначены для поддержания постоянной максимальной и минимальной частоты вращения коленчатого вала; на промежуточных скоростных режимах управление частотой вращения осуществляется вручную через топливный насос.
Всережимные регуляторы служат для поддержания заданной частоты вращения коленчатого вала двигателя при любом изменении нагрузки и применяются на двигателях, работающих в широком диапазоне частот. По принципу действия чувствительного элемента различают механические, гидравлические, пневматические и электрические регуляторы.
В дизельных двигателях чаще всего применяют механические регуляторы с чувствительным элементом центробежного типа. Двигатели малой мощности, работающие с постоянной частотой вращения вала, зачастую оснащают однорежимным механическим регулятором, изменяющим подачу топлива в цилиндры. Валик 1механического регулятора соединён передачей с коленчатым валом дизеля.
Вместе с валиком вращаются корпус 3 регулятора и грузы 5, подвешенные на осях 2. Положение грузов фиксируется пружиной 9, нажимающей на муфту 7 и противодействующей центробежной силе. При увеличении внешней нагрузки уменьшается частота вращения вала, и центробежная сила грузов оказывается недостаточной для преодоления усилия пружины.
В таком случае положение сближающихся грузов фиксируется упорами 6. При этом тяга 8, связанная с рейкой топливных насосов, находится в положении, обеспечивающем наибольший рабочий ход плунжеров топливных насосов, т.е. наибольшую подачу топлива. При уменьшении нагрузки возникает избыточная мощность двигателя, способствующая повышению частоты вращения валика.
Расходящиеся под действием центробежной силы грузы 5 поднимают муфту 7, вследствие чего тяга 8 будет передвигаться в сторону уменьшения рабочего хода плунжеров топливных насосов. Подача топлива в цилиндры уменьшается, соответственно снижается мощность двигателя, и частота вращения становится номинальной.
Если грузы достигнут упоров 4 и 11, тяга 8 займёт положение, соответствующее нулевому рабочему ходу плунжера, т.е. подача топлива прекратится. Каждой частоте вращения соответствуют определённое промежуточное положение грузов и величина хода плунжера. Винт (синхронизатор) 10 регулирует силу нажатия пружины, т.е.
позволяет изменять задаваемую частоту вращения вала дизеля. Чувствительный элемент регулятора непосредственно соединён системой тяг и рычагов с органом управления подачей топлива (с рейкой топливного насоса и т.п.), регулятор называется регулятором прямого действия. В этом случае работа, необходимая для перестановки органов управления, совершается за счёт изменения энергии чувствительного элемента.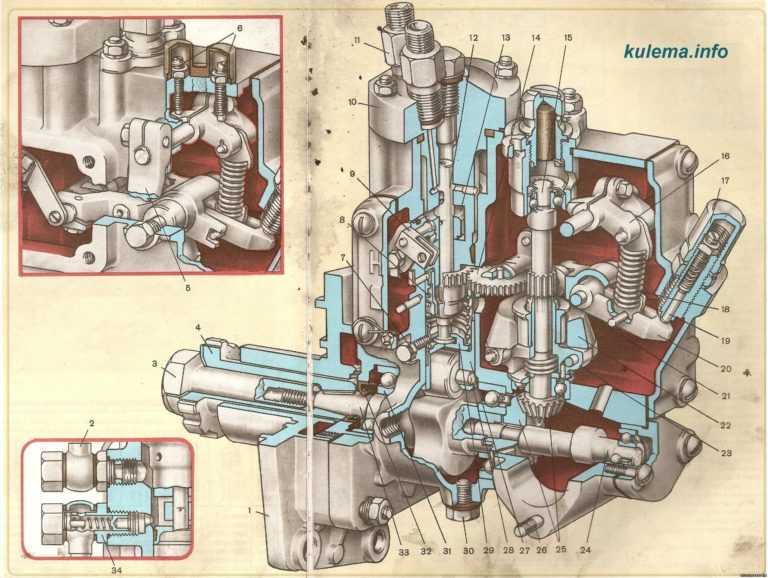 Однорежимные регуляторы частоты вращения устанавливают на дизелях мощностью до 50 кВт. Многорежимные регуляторы обеспечивают работу двигателей с несколькими строго фиксированными частотами вращения, например, тепловозных дизелей. Регуляторы непрямого действия делятся на регуляторы с жёсткой обратной связью и изодромные, т.е. с гибкой обратной связью, которая обеспечивает постоянную частоту вращения на всех нагрузках. У дизелей также предусматривают установку регуляторов безопасности или предельных выключателей, прекращающих подачу топлива в цилиндры при увеличении частоты вращения на 10-25% более номинальной.
Однорежимные регуляторы частоты вращения устанавливают на дизелях мощностью до 50 кВт. Многорежимные регуляторы обеспечивают работу двигателей с несколькими строго фиксированными частотами вращения, например, тепловозных дизелей. Регуляторы непрямого действия делятся на регуляторы с жёсткой обратной связью и изодромные, т.е. с гибкой обратной связью, которая обеспечивает постоянную частоту вращения на всех нагрузках. У дизелей также предусматривают установку регуляторов безопасности или предельных выключателей, прекращающих подачу топлива в цилиндры при увеличении частоты вращения на 10-25% более номинальной.
Cхема однорежимного механического регулятора: 1-валик, 2-ось, 3- корпус регулятора, 4,6,11-упоры, 5-груз, 7-муфта, 8-тяга, 9-пружина, 10-винт.
Всережимный механический центробежный регулятор прямого действия дизеля, поддерживающий любой заданный частотный режим.
Всережимный механический центробежный регулятор прямого действия дизеля, поддерживающей любой заданный частотный режим. Основной его частью является чувствительный элемент, непосредственно реагирующий на изменение частоты вращения и состоящий из группы деталей (грузы, пружины), смонтированных на кулачковом валике топливного насоса в корпусе регулятора.
Основной его частью является чувствительный элемент, непосредственно реагирующий на изменение частоты вращения и состоящий из группы деталей (грузы, пружины), смонтированных на кулачковом валике топливного насоса в корпусе регулятора.
Грузами 10 являются шесть стальных шаров, расположенных в радиальных пазах крестовины 11, насаженной на конец кулачкового валика насоса. Крестовина с шарами помещена между неподвижной в осевом направлении конической тарелкой 9 и подвижной плоской тарелкой 12, перемещающейся по цилиндрическому выступу крестовины и вращающейся во время работы топливного насоса.
Рейка 2, связанная с плунжерами насоса, устанавливает их на определённую подачу топлива. При этом две пружины 5 и 7 стремятся через переводной рычаг 6 и тягу 1 вдвинуть рейку в насос и увеличить подачу топлива.
Эти же грузы, расходясь под действием центробежной силы, вызывают осевое перемещение плоской тарелки и вместе с ней муфты 13 и через тот же рычаг 6 и тягу 1 стремятся уменьшить подачу топлива, вытягивая рейку из насоса.
При уменьшении нагрузки частота вращения коленчатого вала в первый момент возрастает. Центробежная сила шаров при этом увеличивается, и они, перемещая всю систему и рейку влево, поворачивают плунжеры в сторону уменьшения подачи топлива до положения, при котором мощность, развиваемая двигателем, равна внешней нагрузке.
При увеличении нагрузки частота вращения понижается и происходит обратное явление: усилие пружин превосходит снижающуюся центробежную силу шаров и проворачивает вправо рычаг 6 вокруг его оси, перемещая рейку 2 вправо, в сторону увеличения подачи топлива.
Когда момент сопротивления на коленчатом валу дизеля равен крутящему моменту, развиваемому двигателем, в регуляторе устанавливается равновесие между центробежной силой шаров и натяжением пружин регулятора, соответствующее определённой частоте вращения. Повышения частоты вращения при данной нагрузке достигает поворотом рычага 4 вправо.
При этом увеличивается затяжка пружин регулятора, и равновесие между силой пружин 5, 7 и центробежной силой грузов 10 устанавливается при большей частоте вращения. При переходе на меньщую частоту вращения рычаг 4 передвигают влево, уменьшая тем самым натяжение пружин.
При переходе на меньщую частоту вращения рычаг 4 передвигают влево, уменьшая тем самым натяжение пружин.
В период пуска и прогрева во избежание повышенного износа деталей двигателя необходимо поддерживать малую частоту вращения. Поддержание регулятором малой частоты вращения холостого хода осуществляется пружиной 7 с меньшей свободной длиной.
При частоте вращения коленчатого вала дизеля 500-900 об/мин натянута только эта пружина. Пружина 5 с большей свободной длиной включается в работу при частоте вращения коленчатого вала более 900 об/мин. Она натягивается при значительном повороте вправо рычага 4, когда будет выбран зазор в специально удлинённых пазах пружины.
Следовательно, при натянутых обеих пружинах, коленчатый вал дизеля развивает частоту вращения более 900 об/мин. При дальнейшем их натяжении можно получить ещё большую частоту вращения двигателя, вплоть до максимальной.
При этом ось рычага 4 упрётся в винт максимальной частоты вращения, расположенный на внешней стороне корпуса регулятора.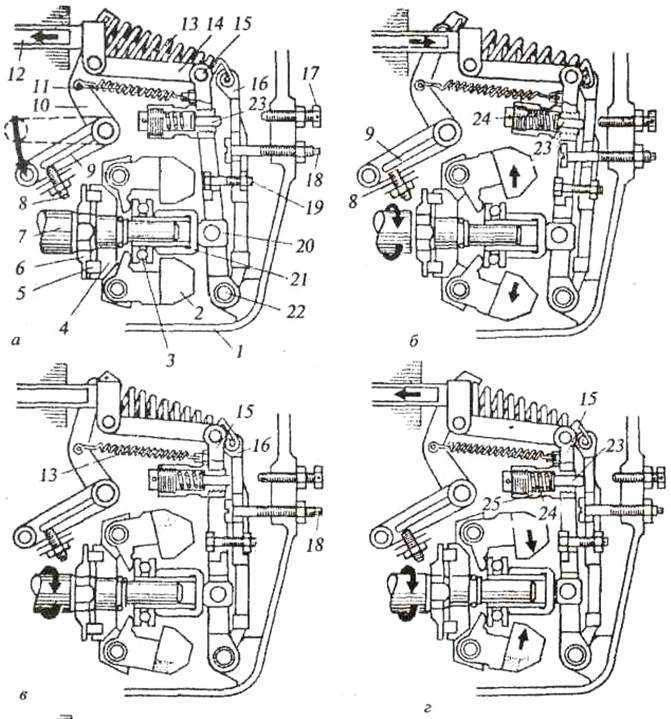 Данное положение рычага отрегулировано таким образом, что он ограничивает максимальную частоту вращения при номинальной мощности на уровне 1500 об/мин.
Данное положение рычага отрегулировано таким образом, что он ограничивает максимальную частоту вращения при номинальной мощности на уровне 1500 об/мин.
Если при установке рычага на номинальную мощность при номинальной частоте вращения 1500 об/мин полностью разгрузить двигатель, частота вращения начнёт повышаться, а регулятор автоматически ( в результате воздействия на рейку насоса) начнёт снижать подачу топлива, пока не наступит равновесие между усилием обеих пружин и центробежной силой грузов, которое наступает при 1650 об/мин. Развить большую частоту вращения благодаря регулятору двигатель не может, т.е. регулятор предохраняет от «разноса» при снятии нагрузки.
Регулирование частоты вращения дизелей. В эксплуатации мощность двигателя изменяется от мощности холостого хода до номинальной. Для получения мощности меньше номинальной снижают частоту вращения ( не изменяя подачу топлива) или уменьшают количество сжигаемого топлива, не изменяя частоты вращения.
Возможно также одновременное снижение частоты вращения и подачи топлива. При этом меняются все показатели работы двигателя. При равенстве мощности двигателя и потребителя параметры двигателя остаются постоянными, и такой режим работы называется установившимся. При изменении мощности потребителя и мощности двигателя параметры работы меняются.
При этом меняются все показатели работы двигателя. При равенстве мощности двигателя и потребителя параметры двигателя остаются постоянными, и такой режим работы называется установившимся. При изменении мощности потребителя и мощности двигателя параметры работы меняются.
Переходным режимом называют переход двигателя на другое значение мощности, по окончании которого наступает новый установившийся режим работы дизеля. Регулировать мощность двигателя на заданном скоростном режиме можно вручную или регулятором частоты вращения.
При отклонении частоты вращения коленчатого вала от заданной регулятор передвигает регулирующий орган топливного насоса и соответственно увеличивает или уменьшает подачу топлива. Изменение частоты вращения воспринимается чувствительным элементом или измерителем скорости.
По принципу действия чувствительного элемента различают механические, гидравлические, пневматические и электрические регуляторы.
Закономерности, определяющие изменение мощности и вращающего момента дизеля в зависимости от частоты вращения вала или от положения рейки топливного насоса, являющейся регулирующим органом, называют характеристиками двигателя.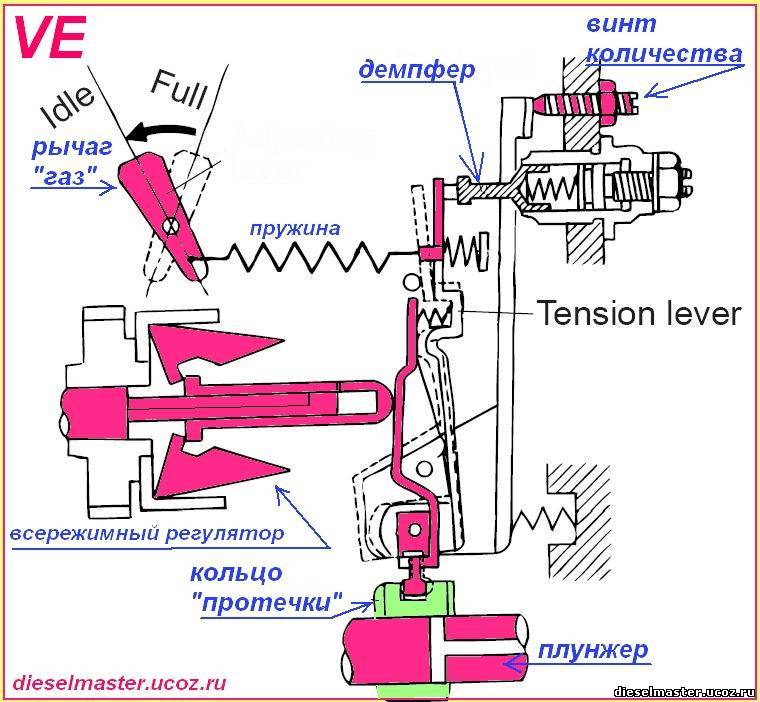
Под внешней характеристикойпредельной мощности понимают зависимость максимально достижимых мощностей двигателя и соответствующих им расходов топлива от частоты вращения. Нагрузочная характеристика двигателя устанавливает зависимость показателей его работы от нагрузки, что характерно для дизель-генераторов рефрижераторного парка. Винтовая характеристика ограничена максимальной мощностью при номинальной частоте вращения и минимальной мощностью при минимально устойчивой частоте вращения.
Всережимный автоматический регулятор частоты вращения
Регулятор частоты вращения рассматриваемого ТНВД включает в себя механический регулятор с центробежными грузами и систему управляющих рычагов.
Схемы работы всережимного регулятора частоты вращения топливного насоса VE с системой рычагов и рабочими положениями дозирующей муфты на различных нагрузочных и скоростных режимах показаны на рисунке.
Грузы регулятора 1 (обычно четыре груза) установлены в держателе, который получает вращение от приводной шестеренки.
Радиальное перемещение грузов трансформируется в осевое перемещение муфты регулятора 12, что изменяет положение нажимного 6 и силового 4 рычагов регулятора, которые, поворачиваясь относительно оси М2, перемещают дозирующую муфту 9, определяя тем самым активный ход плунжера 11.
Рис.
Схема работы всережимного регулятора:
а – пуск двигателя; б – холостой ход; в – режим уменьшения нагрузки; г – режим увеличения нагрузки; 1 – грузы; 2 – ось скользящей муфты; 3 – регулировочный винт максимального режима; 4 – силовой рычаг; 5 – рычаг регулировки подачи топлива; 6 – нажимной рычаг; 7 – упор силового рычага; 8 – пластинчатая пружина пусковой подачи; 9 – дозирующая муфта; 10 – отсечное отверстие плунжера; 11 – плунжер; 12 – скользящая муфта регулятора; 13 – рычаг натяжения пружины; 14 – рычаг управления; 15 – регулировочный винт холостого хода минимального режима; 16 – ось рычага управления; 17 – рабочая пружина регулятора; 18 – фиксатор пружины; 19 – пружина минимального режима холостого хода; 20 – регулировочный винт холостого хода максимального режима
В верхней части силового рычага установлена пружина минимального режима холостого хода 19, а между силовым и нажимным рычагами пластинчатая – пружина пусковой подачи 8.
Рычаг управления 14 воздействует на рабочую пружину регулятора 17, второй конец которой закреплен в силовом рычаге на фиксаторе 18.
Таким образом, положение системы рычагов и, следовательно, дозирующей муфты определяется взаимодействием двух сил – силы предварительной затяжки рабочей пружины регулятора, определяемой положением рычага управления, и центробежной силы грузов, приведенной к муфте.
Работа регулятора при пуске дизеля
Перед пуском двигателя, когда коленчатый вал еще не вращается и топливный насос не работает, грузы регулятора находятся в состоянии покоя на минимальном радиусе, а нажимной рычаг 6 (его другое название – рычаг пуска) под действием пружины пусковой подачи 8 смещен влево на рисунке а, имея возможность качания относительно оси М2. Соответственно нижний шарнирный конец рычага обеспечивает крайне правое положение дозирующей муфты 9 относительно плунжера 11, что соответствует пусковой подаче за счет увеличенного активного хода плунжера h2. Как только двигатель запустится, грузы регулятора расходятся и муфта 12 перемещается вправо на величину хода «S», преодолевая сопротивление достаточно слабой пусковой пружины 8. Рычаг 6 при этом поворачивается на оси М2 по часовой стрелке, перемещая дозирующую муфту в сторону уменьшения подачи (влево на рисунке б).
Как только двигатель запустится, грузы регулятора расходятся и муфта 12 перемещается вправо на величину хода «S», преодолевая сопротивление достаточно слабой пусковой пружины 8. Рычаг 6 при этом поворачивается на оси М2 по часовой стрелке, перемещая дозирующую муфту в сторону уменьшения подачи (влево на рисунке б).
Работа регулятора на минимальной частоте вращения холостого хода
При отсутствии нагрузки и положении рычага управления на упоре в регулировочный винт 15 двигатель должен устойчиво работать на минимальной частоте вращения холостого хода в соответствии со схемой рисунка б.
Регулирование этого режима обеспечивается пружиной холостого хода 19, усилие которой находится в равновесии с центробежной силой грузов, и в результате этого равновесия поддерживается подача топлива, соответствующая активному ходу плунжера h3.
Как только скоростной режим двигателя выходит за пределы минимальной частоты вращения холостого хода, реализуется ход «с» силового рычага при сжатии пружины 19 под действием увеличивающейся центробежной силы грузов.
Работа регулятора на нагрузочных режимах
В эксплуатации дизеля со всережимным регулятором скоростной режим устанавливается водителем путем воздействия через педаль акселератора на рычаг управления 14.
На рабочих режимах пружина пусковой подачи 8 и пружина 19 холостого хода не работают, и работа регулятора определяется предварительной деформацией рабочей пружины 17.
При повороте рычага управления до упора в регулировочный винт холостого хода максимального режима 20 (рисунки в, г) в сторону увеличения скоростного режима и соответствующем растяжении рабочей пружины ее усилие передается на силовой рычаг 4 и затем через рычаг 6 на муфту регулятора 12, заставляя грузы 1 сходиться.
Система рычагов при этом поворачивается относительно оси М2 против часовой стрелки на рисунке, перемещая дозирующую муфту 9 в сторону увеличения подачи до режимов внешней скоростной характеристики.
Частота вращения коленчатого вала дизеля и соответственно грузов регулятора при этом увеличивается, центробежная сила грузов и сопротивление последней усилию рабочей пружины также увеличиваются, и в какой-то момент наступает равновесие сил и равновесие положения всех элементов регулятора. При отсутствии изменения нагрузки двигатель работает на установившемся режиме при постоянной частоте вращения (не принимая во внимание естественную для ДВС нестабильность вращения).
При отсутствии изменения нагрузки двигатель работает на установившемся режиме при постоянной частоте вращения (не принимая во внимание естественную для ДВС нестабильность вращения).
Если на этом режиме имеет место изменение нагрузки, то в работу вступает автоматический регулятор в соответствии со схемами, показанными на рисунках в, г.
При уменьшении нагрузки частота вращения увеличивается, грузы регулятора расходятся и, преодолевая сопротивление рабочей пружины, перемещают муфту регулятора вправо.
Система рычагов при этом поворачивается относительно оси М2 по часовой стрелке, перемещая дозирующую муфту влево, в сторону уменьшения подачи.
На рисунке г показана работа регулятора при положении рычага управления на упоре регулировочного винта холостого хода максимального режима 20 и при увеличении нагрузки.
В этом случае частота вращения вала дизеля уменьшается, грузы регулятора сходятся, центробежная сила грузов уменьшается, и под действием усилия рабочей пружины, муфта регулятора перемещается влево, а система рычагов 4 и 6 перемещает дозирующую муфту вправо, в сторону увеличения подачи.
Всережимный регулятор трактора Т-150
Всережимный регулятор трактора Т-150
Всережимный регулятор, смонтированный в задней части корпуса насоса, необходим для автоматического поддержания установленного числа оборотов коленчатого вала двигателя путем изменения количества топлива, подаваемого насосом в соответствии с нагрузкой двигателя. Регулятор поддерживает установленное число оборотов коленчатого вала на любом скоростном режиме работы двигателя.
Валик регулятора, приводящийся во вращение парой конических шестерен от кулачкового вала топливного насоса, занимает вертикальное положение и вращается в двух шариковых подшипниках. В нижней части на валике установлена крестовина грузов, которая соединена с валиком спиральной пружиной. Пружина предохраняет механизм регулятора от перегрузок при резких изменениях скорости вращения валика. Грузы шарнирно закреплены в ушках крестовины. Ножки грузов снабжены роликами, которые воздействуют на муфту, сидящую на валике. С другой стороны в муфту упирается двуплечий рычаг под действием пружины.
С другой стороны в муфту упирается двуплечий рычаг под действием пружины.
Натяжение пружины можно изменить наружным рычагом, находящимся на валике. Перемещение наружного рычага управления регулятором ограничено двумя упорными винтами: максимального скоростного режима и выключения подачи топлива насосом. Двуплечий рычаг соединен системой тяг и рычагов с дозаторами.
Рекламные предложения на основе ваших интересов:
Дополнительные материалы по теме:
В регуляторе имеется корректор, позволяющий преодолевать временные перегрузки двигателю путем дополнительной подачи топлива насосом. В корпусе корректора находятся шток и ограничитель хода штока. При неработающем корректоре шток выдвинут из корпуса пружиной, а между штоком и ограничителем имеется зазор 0,3 мм. Усилие пружины штока регулируют винтом.
При пуске двигателя рычаг управления регулятором устанавливают в среднее положение. В это время грузы сближены и муфта регулятора занимает нижнее положение. Главная пружина регулятора перемещает рычаг и шток корректора до упора в ограничитель. Образовавшийся зазор А (0,3 мм) в пазах вильчатого рычага позволяет пусковой пружине через систему тяг установить дозатор в крайнее верхнее положение, обеспечивая увеличение подачи топлива при запуске двигателя.
Главная пружина регулятора перемещает рычаг и шток корректора до упора в ограничитель. Образовавшийся зазор А (0,3 мм) в пазах вильчатого рычага позволяет пусковой пружине через систему тяг установить дозатор в крайнее верхнее положение, обеспечивая увеличение подачи топлива при запуске двигателя.
Во время работы двигателя валик регулятора вращается вместе с грузиками. При установившемся режиме работы двигателя и заданном положении рычага управления центробежная сила грузов уравновешена усилием главной пружины, благодаря чему дозаторы удерживаются в определенном положении, а коленчатый вал двигателя вращается с установленной частотой.
При уменьшении нагрузки частота вращения коленчатого вала двигателя увеличивается.
Возрастающая центробежная сила грузов преодолевает усилие главной пружины и перемещает муфту вверх, а система тяг перемещает дозатор вниз, уменьшая подачу топлива насосом.
Коленчатый вал уменьшает частоту вращения до нормальных оборотов, а между главной пружиной и центробежной силой грузов восстанавливается равновесие.
При полной нагрузке рычаг управления переводят в крайнее положение до упора в винт максимального скоростного режима.
Центробежная сила грузов уравновешена главной пружиной, а через систему тяг дозаторы устанавливаются в положение, обеспечивающее трегбуемую подачу топлива соответственно нагрузке двигателя на данном скоростном режиме.
При кратковременной перегрузке двигателя частота вращения коленчатого вала двигателя временно снижается. Центробежная сила грузов уменьшается и под действием главной пружины муфта опускается, а двуплечий рычаг и рычаг корректора перемещаются против часовой стрелки. Рычаг, преодолевая усилие пружины корректора, утапливает шток в корпус. Это позволяет другому концу двуплечего рычага опуститься ниже и через систему тяг переместить дозатор в сторону увеличения подачи топлива для преодоления кратковременной перегрузки. При дальнейшем уменьшении частоты вращения коленчатого вала необходимо уменьшить нагрузку, чтобы не заглох двигатель.
Рис. 1. Всережимный регулятор:
1 — малая регулировочная тяга, 2 — большая регулировочная тяга, 3 — пружина, 4 — рычаг поводка дозатора, 5 — дозатор, 6— валик регулятора, 7 — валик наружного рычага управления, 8 — регулировочный винт пружины корректора, 9 — ограничитель хода штока, 10 — корпус корректора, 11 — шток корректора, 12 — главная пружина, 13 — рычаг корректора, 14 — двуплечий рычаг, 15 — ступица грузов, 16 — спиральная пружина, 17 — коническая пара шестерен привода регулятора, 18 — пробка отверстия для слива масла из топливного насоса с автономной системой смазки, 19 — пробка заливного и контрольного отверстия для масла, 20 — наружный рычаг управления регулятором, 21 — упорный винт максимального скоростного режима, 22 — упорный винт выключения подачи топлива насосом, 23 — ось двуплечего рычага
1. Всережимный регулятор:
1 — малая регулировочная тяга, 2 — большая регулировочная тяга, 3 — пружина, 4 — рычаг поводка дозатора, 5 — дозатор, 6— валик регулятора, 7 — валик наружного рычага управления, 8 — регулировочный винт пружины корректора, 9 — ограничитель хода штока, 10 — корпус корректора, 11 — шток корректора, 12 — главная пружина, 13 — рычаг корректора, 14 — двуплечий рычаг, 15 — ступица грузов, 16 — спиральная пружина, 17 — коническая пара шестерен привода регулятора, 18 — пробка отверстия для слива масла из топливного насоса с автономной системой смазки, 19 — пробка заливного и контрольного отверстия для масла, 20 — наружный рычаг управления регулятором, 21 — упорный винт максимального скоростного режима, 22 — упорный винт выключения подачи топлива насосом, 23 — ось двуплечего рычага
Рис. 2. Схема работы регулятора: а — пуск двигателя, 6 — уменьшение нагрузки, в — полная нагрузка, г — кратковременная перегрузка; 1 —дозатор, 2 — пусковая пружина, 3 — наружный рычаг управления, 4 — главная пружина, 5 — ограничитель хода штока корректора, 6 — рычаг корректора, 7 — двуплечий (вильчатый) рычаг, 8 — муфта, 9 — груз, 10 — упорный винт максимального скоростного режима, 11 — корпус корректора
Рис.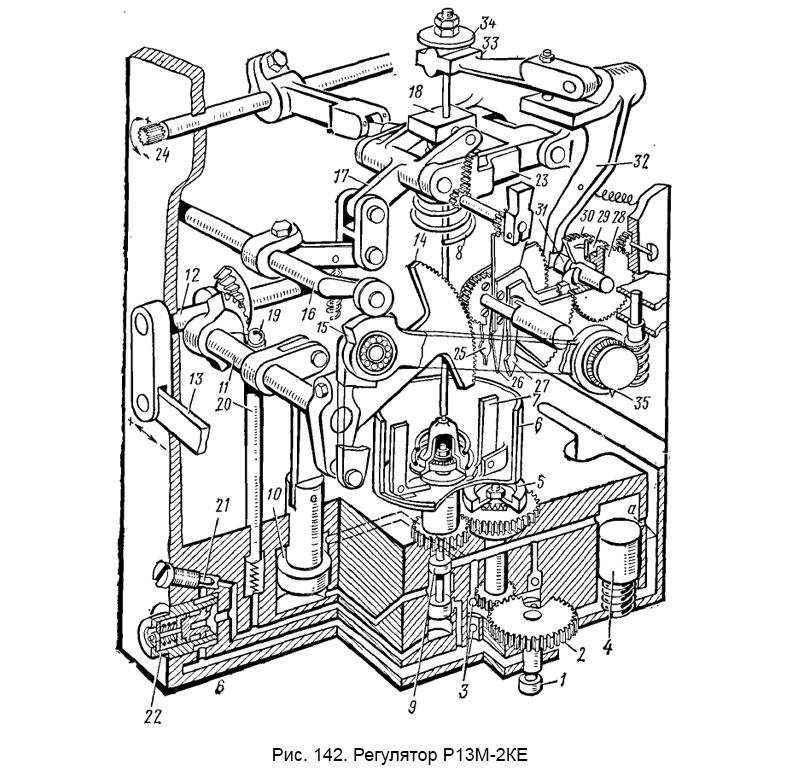 3. Воздухоочиститель:
1 — центральная труба, 2 — пылесборный бункер, 3 — циклон, 4 — кожух, 5 — рефлектор, 6—кассета, 7 — защитная сетка, 8 — крышка, 9 — поддон, 10 — труба эжектора, 11—трубка для удаления пыли, 12 — турбокомпрессор, 13 — выхлопной коллектор, 14 — направляющая втулка, 15 — входной патрубок
3. Воздухоочиститель:
1 — центральная труба, 2 — пылесборный бункер, 3 — циклон, 4 — кожух, 5 — рефлектор, 6—кассета, 7 — защитная сетка, 8 — крышка, 9 — поддон, 10 — труба эжектора, 11—трубка для удаления пыли, 12 — турбокомпрессор, 13 — выхлопной коллектор, 14 — направляющая втулка, 15 — входной патрубок
После преодоления двигателем кратковременной перегрузки частота вращения коленчатого вала двигателя увеличивается, а возросшая центробежная сила грузов преодолевает усилие главной пружины и муфта занимает такое положение, что рычаг слегка касается штока корректора.
Назначение, типы и принцип действия регуляторов
ЛАБОРАТОРНАЯ РАБОТА №7
Системы регулирования двигателей
7.1 Цель работы:
1. Назначение и классификация регуляторов.
2. Уяснить необходимость установки на дизельные двигатели буровых установок всережимных регуляторов частоты вращения коленчатого вала и на карбюраторных автомобильных и пусковых двигателях- ограничителей максимальной частоты вращения (однорежимных регуляторов).
3. Устройство и принципы действия однорежимного и всережимного регуляторов.
4. Для чего нужен и как работает корректор подачи топлива?
Оборудование рабочего места
Топливные насосы УТН- 5, 4ТН- 8, 5х10 и дизели типа В- 2 о регуляторами частоты вращения; схемы, плакаты и макеты регуляторов пускового двигателя ПД- 10, автомобильного двигателя ЗИЛ- 130, дизелей В-2, СМД- 14, Д- 37Е, ЯМЗ- 238 НБ, Д- 50.
Задание и указания к работе
1) Для изучения данной работы необходимо самостоятельно проработать соответствующие разделы курса (Система регулирования двигателей) по лекциям и рекомендуемой литературе, а также по данному руководству. Затем, пользуясь учебными плакатами, экспонатами и макетами , изучить устройство однорежимных и всережимных регуляторов двигателей ПД- 10, ЗИЛ- 130, СМД- 14, Д- 108, ЯМЗ- 238 НБ, Д- 50, В-2. Знать место установки указанных регуляторов на двигателе; ознакомиться с расположением и креплением регуляторов частоты вращения двигателей на топливных насосах.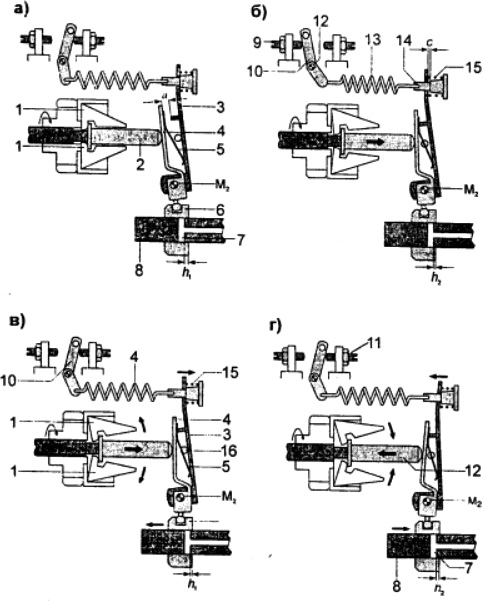
2) Изучить работу однорежимных и всережимных регуляторов;
Устройство деталей и элементов регуляторов, их назначение, взаимодействие, конструктивные особенности. Обратить особое внимание на момент, когда в работу включается корректор подачи топлива.
Оценить этот момент с точки зрения изменения динамических качеств дизеля.
3) Изучить устройство и работу корректора подачи топлива, а также уяснить совместное влияние на положение топливной рейки насоса центробежной силы грузов, упругой силы пружин регулятора и корректора подачи топлива.
Двигатели могут при определенных режимах пойти в разнос. Уметь определить, какой механизм регулятора в этом случае отказал в работе.
Изучая работу всережимного регулятора, выяснить за счет чего достигается экономичность работы двигателя на частичных нагрузках.
4) При изучении устройства регуляторов органичителей максимальной частоты вращения уясните, как можно изменить установки максимального числа оборотов на регуляторе ограничителя максимального числа оборотов. Следует уяснить принцип работы регулятора при пуске дизеля на эксплуатационных режимах при органичении максимальной скорости коленчатого вала. Выяснить назначения регулировочного винта, болта-органичителя, упорного винта, регулировочных прокладок.
Следует уяснить принцип работы регулятора при пуске дизеля на эксплуатационных режимах при органичении максимальной скорости коленчатого вала. Выяснить назначения регулировочного винта, болта-органичителя, упорного винта, регулировочных прокладок.
5) Рассмотрите, как проводится в действия регулятор частоты вращения, установленной на автомобильных двигателях.
Назначение, типы и принцип действия регуляторов
Анализ реальных условии работы двигателей внутреннего сгорания различного назначения показывает, что значительною часть общего времени эксплуатации ни работают на различных неустановившихся режимах. Характер изменения режимов работы двигателей в эксплуатационных условия различен и зависит от типа и назначения силовой установки. В особо сложных, разнообразных и специфических условиях эксплуатируются двигатели, применяемые в нефтяной и газовой промышленности.
Тепловые двигатели, особенно наземно-транспортные двигателей внутреннего сгорания широко применяется в геолого-разведочных работах, бурении нефтяных и газовых скважин, на компрессорных станциях магистральных газопроводов и в других отраслях нефтяной и газовой промышленности.
Основными операциями бурения является собственно механическое бурение, спуск и подъем инструмента. Мощности для привода основных механизмов при бурении зависят от режима бурения, типа и размера долота, физико-химических свойств проходимых пород, конструкции скважины и бурильной колонны, наземного оборудования.
Возможными режимами работы ДЕС в бурении являются: холостой ход двигателя на минимальном скоростном режиме; работа двигателя при холостом вращении наземного оборудования; работа двигателя при совершении различных операций бурения; это работа выполняется при различных скоростных режимах; работа двигателя- при перегрузках.
При неустановившихся режимах резкое изменение нагрузки на коленчатом валу вызывает колебание скоростного режима, что нарушает протекание рабочего процесса, регулирование подачи топлива, температурного состояния двигателей и динамики газообмена, подачу смазки к трущимся поверхностям при одновременном значительном изменении газовых (Рmax, (dp/dφ)max) и тепловых нагрузок на детали и механизмы двигателей.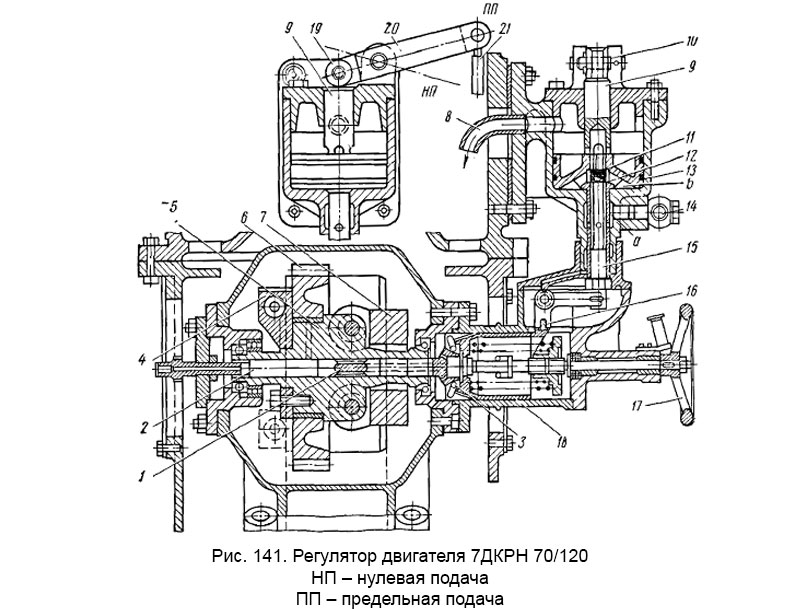 Несомненно, все это снижает мощностные и экономические показатели, уменьшает надежность и долговечность двигателей.
Несомненно, все это снижает мощностные и экономические показатели, уменьшает надежность и долговечность двигателей.
Таким образом, в зависимости от конкретных условий эксплуатации различных машин нагрузка на их двигателей постоянно изменяется. Если при этом сохранять постоянной подачу топлива, от изменении нагрузки вызывает изменение частоты вращения коленчатого вала. Для сохранения задачного скоростного режима на двигателях установливают регуляторы, автоматы поддерживающие в определенных пределах частоту вращения коленчатого вала двигателя зависимо от внешней нагрузки.
В результате воздействия регулятора на рейку топливного насоса или на дроссельную заслонку изменяется количество подаваемого в цилиндры топливо или горючей смеси, а следовательно, повышается или уменьшается мощность двигателя при заданной частоте вращения коленчатого вала.
По принципу действия чувствительного элемента регуляторы разделяют на механические, гидравлические, пневматические и электрические. Чувствительным элементом называется механизм, реагирующий на изменение параметра и вырабатывающий импульс для воздействия на орган управления двигателя.
Чувствительным элементом называется механизм, реагирующий на изменение параметра и вырабатывающий импульс для воздействия на орган управления двигателя.
Если чувствительный элемент кинематически непосредственно воздействует на орган управления, регулятор называется регулятором прямого действия. Если в регуляторе имеется усилительный элемент- серводвигатель, регулятора называются регулятором непрямого действия. Автоматические регуляторы прямого действия устанавливают на быстроходных двигателях малый и средней мощности.
Наибольшее распространение получили пневматические, центробежные и пневмоцентробежные регуляторы.
Пневматические регуляторы, действуя на дроссельную заслонку карбюратора или рейку топливного насоса, используют скоростной напор или разрежение во впускном трубопроводе двигателя.
Пневмоцентробежный регулятор состоит из двух механизмов (рисунок 2): центробежного и исполнительного диафрагменным приводом, воздействующим на дроссельую заслонку карбюратора.
На стационарных и автотракторных двигателях преимущественно распространенны регуляторы прямого действия с механическими центробежными чувствительными элементами, т.е. от скоростного режима.
Центробежные регуляторы по принципу действия на однорежимные, двухрежимные и всережимные.
Однорежимные регуляторы предназначены для поддержания одного скоростного режима, который задается при установке регулятора. Все остальные скоростные режимы можно задавать, только перемещая дроссельную заслонку карбюратора рычажком, управляемым водителем. Эти регуляторы, как правило, является ограничителями максимальных частот вращения двигателя. Применяются на карбюраторных автомобильных двигателях.
Двухрежимные регуляторы поддерживают максимальную и минимальную частоту вращения двигателя. Эти регуляторы устанавливаются на автомобильных дизелях ЯАЗ-204, 206 и получили ограниченное применение.
Всережимные регуляторы обеспечивают устойчивую работу двигателя на любом скоростном режиме. Всережимные регуляторы устанавливаются на всех тракторных дизельных двигателях и на дизельных двигателях буровых установок.
Всережимные регуляторы устанавливаются на всех тракторных дизельных двигателях и на дизельных двигателях буровых установок.
Схема однорежимного регулятора представлена на рисунке 1. К основным частям этого регулятора относятся валик I с жестко закрепленной на нем приводной шестерней 2, два грузика 3, подвижная муфта 5, двуплечий рычаг 6, соединенный с дроссельной заслонкой II или рейкой I2 топливного насоса, витковая пружина 7.
Рисунок 1 – Схема всережимного регулятора
Валик регулятора I получает вращения от кулачного вала топливного насоса через шестеренчатую пару 2. При увеличении частоты вращения грузики расходятся и перемещают муфту 5, которая преодолевает сопротивление пружины 7 и поворачивает двуплечий рычаг 6. Под действием центробежной силы грузиков и силы упругости пружины 7 подвижная муфта и двуплечий рычаг 6 в каждом моменте времени занимают некоторое положение, определяемое соотношением А и Б. Поскольку другой конец рычага 6 соединен тягой I0 с рейкой топливного насоса I2 или с дроссельной заслонкой II карбюратора, то при его смещении подача топлива в цилиндры будет изменяться.
Когда двигатель не работает, грузики неподвижны, двуплечий рычаг 6 прижат к ним усилием пружины 7, а рейки насоса или дроссельная заслонка находятся в положении максимальной подачи топлива. Это же положение рейка или заслонка занимает и в первые моменты запуска двигателя. По мере запуска увеличивается частота вращения коленчатого вала двигателя, ускоряется вращение валика I регулятора и возрастает центробежная сила вращающихся грузиков. Когда же частота вращения повысится на сколько, что сила Б давление грузиков станет больше усилия А пружины 7, грузы начинают расходиться, смещают влево подвижную муфту 5, та- двуплечий рычаг, и в результате подача топлива или горячей смеси начинает уменьшаться. При этом мощность двигателя снижается, и под действием внешней нагрузки частота вращения коленчатого вала уменьшается. Снижение подачи будет происходить до тех пор, пока муфта 5 не переместит рычаг 6 в положение при котором подача топлива обеспечит необходимую частоту вращения вала двигателя. По достижении равновесия между центробежной силой Б грузиков и силой А давления пружины муфта 5 и двуплечий рычаг удерживаются в определенном положении.
По достижении равновесия между центробежной силой Б грузиков и силой А давления пружины муфта 5 и двуплечий рычаг удерживаются в определенном положении.
И наоборот при возрастании внешней нагрузки частота вращения коленчатого вала сила инерции грузиков и усилие Б, приложенное к муфте 5, уменьшаются. Под действием усилия А пружины двуплечий рычаг передвигается вправо и перемещает рейку топливного насоса или дроссельной заслонки в сторону увеличения подачи. В результате подачи горючей смеси или топлива в цилиндры увеличиваются мощности двигателя возрастают ранее пониженный скоростной режим работы двигателя восстанавливается.
Регулируемый скоростной режим работы зависит от соотношения силы пружины 7 и центробежной силы грузиков 3 при установленной частоте вращения коленчатого вала. Максимальная органичиваемая регулятором частота вращения коленчатого вала зависит от первоначального натяжения пружины 7 регулировочного болта 8.
Работа двигателя при чрезмерно большой частоте вращения коленчатого вала сопровождается увеличением износа деталей и может привести к их поломке. Поэтому в целях повышения сохранности двигателей на грузовых автомобилях ставят ограничитель максимальной частоты вращения двигателя. Применяют ограничители пневматического типа, совмещаемые с устройством карбюратора, и ограничителя пневмоцентробежного типа, которые состоят из центробежного датчика, установленного на двигателе, и диафрагменного исполнительного механизма, монтируемого на карбюраторе.
Поэтому в целях повышения сохранности двигателей на грузовых автомобилях ставят ограничитель максимальной частоты вращения двигателя. Применяют ограничители пневматического типа, совмещаемые с устройством карбюратора, и ограничителя пневмоцентробежного типа, которые состоят из центробежного датчика, установленного на двигателе, и диафрагменного исполнительного механизма, монтируемого на карбюраторе.
Устройство одного из ограничителей центробежно-вакуумного типа показана на рисунке 2. Датчик А состоит из неподвижного корпуса 1 и вращающегося в нем клапана 2, удерживаемого от перемещения по направляющей втулке пружиной 3. Клапан получает вращение через специальный привод от распределительного или коленчатого вала. Через отверстие 4 гнездо клапана 2 и трубопровод 5 верхняя полость исполнительного механизма Б сообщена с атмосферой. Двумя трубопроводами через калиброванные отверстия 6 и 10 она сообщена также со смесительной камерой карбюратора и пространством за дроссельной заслонкой. Пружина 7 стремится открыть дроссельную заслонку 9, положение которой определяется рычагом управления 8, не препятствующим ее закрытию. Система рычагов 11 и 13 вследствие вильчатого соединения не препятствует изменению положения дроссельной заслонки. Независимо от положения дроссельной заслонки благодаря наличию двух отверстий 6 и 10 над диафрагмой создается разрежение, достаточное для ее перемещения вверх, при этом рычаг 13 поворачивается около шарнира 12, перемешает 11 и прикрывает дроссельную заслонку. Ограничители такого типа работают четко независимо от того, при каком положении дроссельной заслонки частота вращения коленчатого вала достигает максимуму.
Пружина 7 стремится открыть дроссельную заслонку 9, положение которой определяется рычагом управления 8, не препятствующим ее закрытию. Система рычагов 11 и 13 вследствие вильчатого соединения не препятствует изменению положения дроссельной заслонки. Независимо от положения дроссельной заслонки благодаря наличию двух отверстий 6 и 10 над диафрагмой создается разрежение, достаточное для ее перемещения вверх, при этом рычаг 13 поворачивается около шарнира 12, перемешает 11 и прикрывает дроссельную заслонку. Ограничители такого типа работают четко независимо от того, при каком положении дроссельной заслонки частота вращения коленчатого вала достигает максимуму.
В бурении нефтяных и газовых скважин в качестве энергопривода силовых агрегатов буровых установок получили распространение поршневые ДВС В2 – 300, В2-400, В2-450, В2- 500, В2- 800ТК, М- 622, 1Д12Б, ЯМЗ- 236, ЯМЗ- 238, Д- 108, 1Д- 6, Д- 50, Д- 54 и др. На этих дизельных двигателях буровых устанавливаются всережимные регуляторы.
Рисунок 2 – Схема центробежного вакуумного ограничителя максимальной частоты вращения двигателя
Всережимный регулятор автоматически поддерживает в определенных пределах установленную машинистом частоту вращение коленчатого вала независимо от внешней нагрузки. Действуя на рейку топливного насоса, На рейку топливного насоса, регулятор изменяет количество подаваемого в цилиндры топлива, а следовательно, повышает или уменьшает мощность двигателя. Этим обеспечивает постоянство частоты вращения коленчатого вала. Такой способ регулирования принято называть качественным регулированием. При качественном регулировании и остается постоянным количество воздуха, поступающего за рабочий цикл в цилиндр двигателя, но изменяется количество топлива, т.е. коэффициент избытка воздуха (α= Gai2/Bl0). При увеличении внешней нагрузки подача топлива автоматически увеличивается, а при снижении – уменьшается.
Такое регулирование применяют преимущественно в дизелях, у которых коэффициент избытка воздуха изменяется от 4…5 на холостом ходу до 1,3…2,0 при полной нагрузке.
При количественном регулировании изменяется количество поступающей смеси, а соотношение топлива и воздуха остается постоянным т.е коэффициент избытка воздуха не изменяется. Такое регулирование применяют бензиновых и газовых двигателя с искровым зажиганием.
При смешенном регулировании изменяются количество подаваемых топлива и воздуха или смеси, т.е. изменяется состав и количество смеси в зависимости от нагрузки на двигатель. Такое регулирование применяет в газодизельных и газовых двигателях с факельным зажиганием.
Большинство современных дизелей имеет качественное регулирование, которое осуществляется всережимными регуляторами прямого действия. Применение всережимного регулятора на двигателе, работающем с неустановившимся режимом, повышает производительность установки. В качестве примера на рисунке 3 приведена конструкция всережимного регулятора топливного насоса высокого давления УТН-5, устанавливаемого на дизелях Д-50, Д-37Е, Д- 240 и др.
Рисунок 3 – Всережимный регулятор топливного насоса высокого давления УТН-5
Регулятор топливного насоса УТН-5 имеет четыре груза 1, соединенных осями. Ступица грузов свободно сидит на кулачковом валу 3 топливного насоса. По хвостовику кулачкового вала свободно передвигается муфта 17 регулятора с упорным шарикоподшипником. В задней части регулятора на оси установлены основной 16 и промежуточный 14 рычаги. В верхней части промежуточный рычаг соединен тягой 9 с рейкой 8 насоса. На промежуточном рычаге 14 расположены ролик 15, корректор и шпилька крепления пружины 7 обогатителя. Промежуточный и основной рычаги связаны между собой болтом 13, который обеспечивает необходимый угловой люфт между рычагами.
Рисунок 4 – Схема центробежноговсережимного регулятора топливного насоса дизеля типа В-2
При пуске двигателя рычаг 4 управления регулятором находится на упоре с винтом 5 ограничивающим предельную частоту вращения вала дизеля, а рычаг 6 обеспечивает максимальное натяжение пружины. Пружина 10 прижимает основной рычаг к головке болта 12, ограничивающего номинальную цикловую подачу топлива, а пружина 7 автоматического обогащения отводит до упора в головку болта 13 промежуточный рычаг, который воздействуя на тягу 9, перемещает на некоторую величину рейку топливного насоса в сторону увеличения цикловой подачи топлива, необходимо для пуска двигателя.
Пружина 10 прижимает основной рычаг к головке болта 12, ограничивающего номинальную цикловую подачу топлива, а пружина 7 автоматического обогащения отводит до упора в головку болта 13 промежуточный рычаг, который воздействуя на тягу 9, перемещает на некоторую величину рейку топливного насоса в сторону увеличения цикловой подачи топлива, необходимо для пуска двигателя.
Корректор автоматически изменяет максимальную подачу при изменении скоростного режима с целью увеличения максимального крутящего момента и повышения коэффициента приспособляемости дизеля . Отношения максимального крутящего момента к крутящему моменту , получаемое при максимальной мощности называется коэффициентом приспособляемости К.
Поиск по сайту:
| А | РВ | ПОФ | Включение или отключение компаратора сбоя питания | ||||||||||||||||||||||||||||||||
Отключено | 0 | Отключить | |||||||||||||||||||||||||||||||||
Включено | 1 | Включить | |||||||||||||||||||||||||||||||||
| Б | РВ | ПОРОГ | Настройка порога компаратора сбоя питания | ||||||||||||||||||||||||||||||||
В19 | 6 | Установить порог 1,9 В | |||||||||||||||||||||||||||||||||
В20 | 7 | Установить пороговое значение 2,0 В | |||||||||||||||||||||||||||||||||
В21 | 8 | Установить пороговое значение 2,1 В | |||||||||||||||||||||||||||||||||
В22 | 9 | Установить пороговое значение 2,2 В | |||||||||||||||||||||||||||||||||
В23 | 10 | Установить пороговое значение 2,3 В | |||||||||||||||||||||||||||||||||
В24 | 11 | Установить пороговое значение 2,4 В | |||||||||||||||||||||||||||||||||
В25 | 12 | Установить пороговое значение 2,5 В | |||||||||||||||||||||||||||||||||
В26 | 13 | Установить пороговое значение 2,6 В | |||||||||||||||||||||||||||||||||
В27 | 14 | Установить пороговое значение 2,7 В | |||||||||||||||||||||||||||||||||
В28 | 15 | Установить пороговое значение 2,8 В | |||||||||||||||||||||||||||||||||
| Д | РВ | ПОРОГVDDH | Пороговое значение компаратора отключения питания для подачи напряжения на VDDH | ||||||||||||||||||||||||||||||||
В27 | 0 | Установить пороговое значение 2,7 В | |||||||||||||||||||||||||||||||||
В28 | 1 | Установить пороговое значение 2,8 В | |||||||||||||||||||||||||||||||||
В29 | 2 | Установить пороговое значение 2,9 В | |||||||||||||||||||||||||||||||||
В30 | 3 | Установить пороговое значение 3,0 В | |||||||||||||||||||||||||||||||||
В31 | 4 | Установить порог 3,1 В | |||||||||||||||||||||||||||||||||
В32 | 5 | Установить пороговое значение 3,2 В | |||||||||||||||||||||||||||||||||
В33 | 6 | Установить пороговое значение 3,3 В | |||||||||||||||||||||||||||||||||
В34 | 7 | Установить пороговое значение 3,4 В | |||||||||||||||||||||||||||||||||
В35 | 8 | Установить пороговое значение 3,5 В | |||||||||||||||||||||||||||||||||
В36 | 9 | Установить пороговое значение 3,6 В | |||||||||||||||||||||||||||||||||
В37 | 10 | Установить пороговое значение 3,7 В | |||||||||||||||||||||||||||||||||
В38 | 11 | Установить пороговое значение 3,8 В | |||||||||||||||||||||||||||||||||
В39 | 12 | Установите пороговое значение 3,9В | |||||||||||||||||||||||||||||||||
В40 | 13 | Установить пороговое значение 4,0 В | |||||||||||||||||||||||||||||||||
В41 | 14 | Установить пороговое значение 4,1 В | |||||||||||||||||||||||||||||||||
В42 | 15 | Установить пороговое значение 4,2 В | |||||||||||||||||||||||||||||||||
AN-140: основные понятия линейного регулятора и импульсного источника питания
по Генри Чжан Скачать PDF
Аннотация
В этой статье объясняются основные концепции линейных регуляторов и импульсных источников питания (SMPS). Он предназначен для системных инженеров, которые могут быть не очень хорошо знакомы с конструкциями и выбором источников питания. Объясняются основные принципы работы линейных регуляторов и SMPS, обсуждаются преимущества и недостатки каждого решения. Понижающий преобразователь используется в качестве примера для дальнейшего объяснения особенностей конструкции импульсного стабилизатора.
Он предназначен для системных инженеров, которые могут быть не очень хорошо знакомы с конструкциями и выбором источников питания. Объясняются основные принципы работы линейных регуляторов и SMPS, обсуждаются преимущества и недостатки каждого решения. Понижающий преобразователь используется в качестве примера для дальнейшего объяснения особенностей конструкции импульсного стабилизатора.
Введение
Современные конструкции требуют все большего количества шин питания и решений по питанию в электронных системах с нагрузками от нескольких мА для резервных источников питания до более 100 А для регуляторов напряжения ASIC. Важно выбрать подходящее решение для целевого приложения и обеспечить соответствие заданным требованиям к производительности, таким как высокая эффективность, малое пространство на печатной плате (печатной плате), точное регулирование выходного сигнала, быстрая переходная характеристика, низкая стоимость решения и т. д. Схема управления питанием становится все более частой и сложной задачей для разработчиков систем, многие из которых могут не иметь сильного опыта работы с властью.
Преобразователь мощности генерирует выходное напряжение и ток для нагрузки от заданного источника входного питания. Он должен соответствовать требованиям регулирования напряжения или тока нагрузки в установившихся и переходных режимах. Он также должен защищать нагрузку и систему в случае отказа компонента. В зависимости от конкретного приложения разработчик может выбрать либо линейный регулятор (LR), либо импульсный источник питания (SMPS). Чтобы сделать наилучший выбор решения, дизайнерам важно знать достоинства, недостатки и проблемы дизайна каждого подхода.
В этой статье основное внимание уделяется неизолированным источникам питания и дается введение в основы их работы и проектирования.
Линейные регуляторы
Как работает линейный регулятор
Начнем с простого примера. Во встроенной системе шина 12 В доступна от внешнего источника питания. На системной плате напряжение 3,3В необходимо для питания операционного усилителя (ОУ). Самый простой способ получить 3,3 В — использовать резисторный делитель от шины 12 В, как показано на рис. 1. Хорошо ли он работает? Обычно нет. V 9 операционного усилителяТок контакта 0704 CC может варьироваться в зависимости от условий эксплуатации. Если используется делитель с постоянным резистором, напряжение IC V CC зависит от нагрузки. Кроме того, вход шины 12 В может плохо регулироваться. В той же системе может быть много других нагрузок, использующих шину 12 В. Из-за импеданса шины напряжение на шине 12 В зависит от нагрузки на шину. В результате резисторный делитель не может обеспечить регулируемое напряжение 3,3 В на операционном усилителе, чтобы обеспечить его правильную работу. Поэтому необходим специальный контур регулирования напряжения. Как показано на рисунке 2, петля обратной связи должна регулировать значение верхнего резистора R1, чтобы динамически регулировать напряжение 3,3 В на V 9.0704 СС .
1. Хорошо ли он работает? Обычно нет. V 9 операционного усилителяТок контакта 0704 CC может варьироваться в зависимости от условий эксплуатации. Если используется делитель с постоянным резистором, напряжение IC V CC зависит от нагрузки. Кроме того, вход шины 12 В может плохо регулироваться. В той же системе может быть много других нагрузок, использующих шину 12 В. Из-за импеданса шины напряжение на шине 12 В зависит от нагрузки на шину. В результате резисторный делитель не может обеспечить регулируемое напряжение 3,3 В на операционном усилителе, чтобы обеспечить его правильную работу. Поэтому необходим специальный контур регулирования напряжения. Как показано на рисунке 2, петля обратной связи должна регулировать значение верхнего резистора R1, чтобы динамически регулировать напряжение 3,3 В на V 9.0704 СС .
Рис. 2. Контур обратной связи регулирует значение последовательного резистора R1 для регулирования 3,3 В
2. Контур обратной связи регулирует значение последовательного резистора R1 для регулирования 3,3 В
Переменный резистор такого типа может быть реализован с помощью линейного регулятора, как показано на рис. 3. Линейный регулятор управляет биполярным или силовым полевым транзистором (FET) в его линейном режиме. Таким образом, транзистор работает как переменный резистор последовательно с выходной нагрузкой. Концептуально, чтобы установить петлю обратной связи, усилитель ошибки измеряет выходное напряжение постоянного тока через сеть дискретных резисторов R A и R B , затем сравнивает напряжение обратной связи V FB с опорным напряжением V REF . Выходное напряжение усилителя ошибки управляет базой последовательного силового транзистора через усилитель тока. Когда входное напряжение V BUS уменьшается или ток нагрузки увеличивается, выходное напряжение V CC падает. Напряжение обратной связи V FB также уменьшается. В результате усилитель ошибки обратной связи и усилитель тока генерируют больший ток в базу транзистора Q1. Это уменьшает падение напряжения V CE и, следовательно, возвращает выходное напряжение V CC , так что V FB равно V REF . С другой стороны, если выходное напряжение V CC повышается аналогичным образом, цепь отрицательной обратной связи увеличивает V CE , чтобы обеспечить точное регулирование выходного напряжения 3,3 В. Таким образом, любое изменение V O поглощается напряжением транзистора линейного стабилизатора V CE . Так что выходное напряжение V CC всегда постоянно и хорошо регулируется.
В результате усилитель ошибки обратной связи и усилитель тока генерируют больший ток в базу транзистора Q1. Это уменьшает падение напряжения V CE и, следовательно, возвращает выходное напряжение V CC , так что V FB равно V REF . С другой стороны, если выходное напряжение V CC повышается аналогичным образом, цепь отрицательной обратной связи увеличивает V CE , чтобы обеспечить точное регулирование выходного напряжения 3,3 В. Таким образом, любое изменение V O поглощается напряжением транзистора линейного стабилизатора V CE . Так что выходное напряжение V CC всегда постоянно и хорошо регулируется.
Рис. 3. Линейный регулятор с переменным резистором для регулирования выходного напряжения
Зачем использовать линейные регуляторы?
Линейный регулятор уже очень давно широко используется в промышленности. Это было основой для отрасли электропитания, пока импульсные источники питания не стали преобладать после 1960-х годов.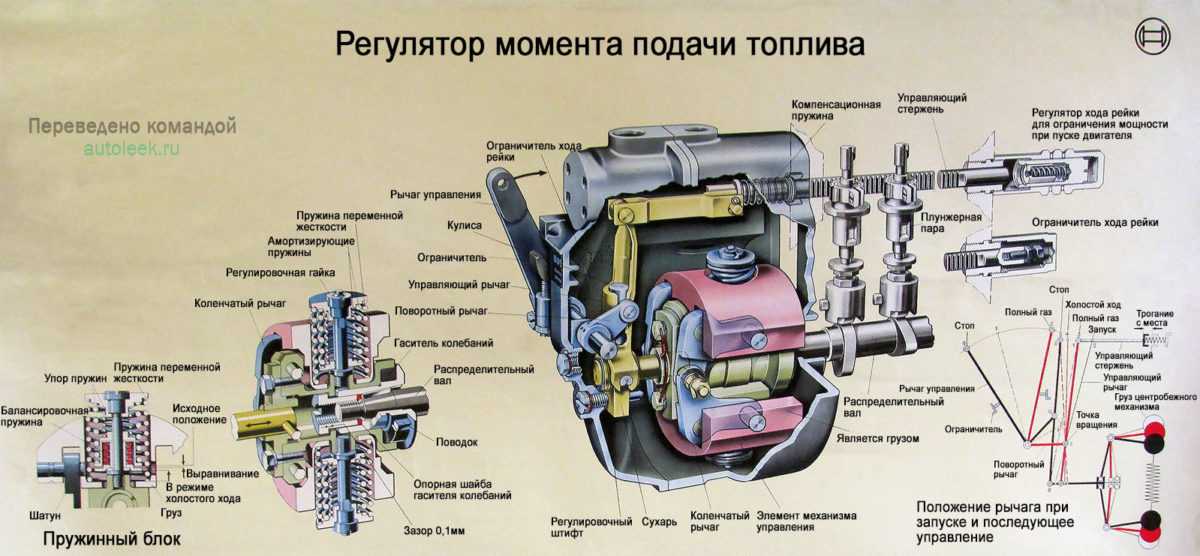 Даже сегодня линейные регуляторы по-прежнему широко используются в самых разных приложениях.
Даже сегодня линейные регуляторы по-прежнему широко используются в самых разных приложениях.
Помимо простоты использования, линейные регуляторы имеют и другие преимущества. Поставщики систем управления питанием разработали множество встроенных линейных регуляторов. Для типичного встроенного линейного регулятора требуется только V IN , V OUT , FB и дополнительные контакты GND. На рис. 4 показан типичный 3-выводной линейный стабилизатор LT1083, разработанный более 20 лет назад. Для установки выходного напряжения требуются только входной конденсатор, выходной конденсатор и два резистора обратной связи. Практически любой инженер-электрик может спроектировать источник питания с этими простыми линейными регуляторами.
Рис. 4. Встроенный линейный регулятор Пример: линейный регулятор 7,5 А только с тремя контактами
Один недостаток — линейный регулятор может сжигать много энергии
Основным недостатком использования линейных регуляторов может быть чрезмерное рассеивание мощности его последовательным транзистором Q1, работающим в линейном режиме.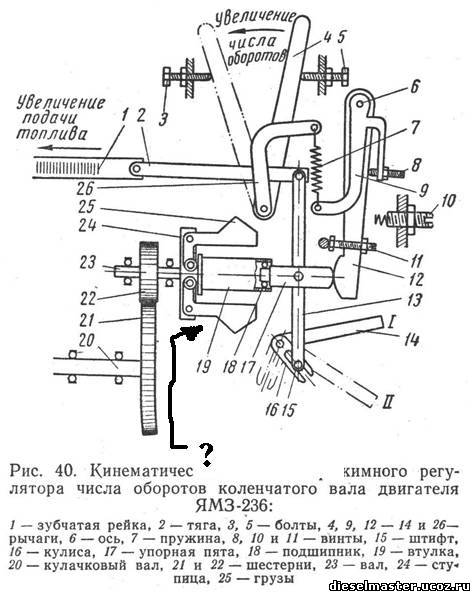 Как объяснялось ранее, транзистор линейного регулятора концептуально представляет собой переменный резистор. Поскольку весь ток нагрузки должен проходить через последовательный транзистор, его рассеиваемая мощность равна P Потери = (V IN – V O ) • I O . В этом случае эффективность линейного регулятора можно быстро оценить по формуле:
Как объяснялось ранее, транзистор линейного регулятора концептуально представляет собой переменный резистор. Поскольку весь ток нагрузки должен проходить через последовательный транзистор, его рассеиваемая мощность равна P Потери = (V IN – V O ) • I O . В этом случае эффективность линейного регулятора можно быстро оценить по формуле:
Таким образом, в примере на Рисунке 1, когда на входе 12 В, а на выходе 3,3 В, эффективность линейного регулятора составляет всего 27,5%. В этом случае 72,5% входной мощности просто тратится впустую и генерирует тепло в регуляторе. Это означает, что транзистор должен иметь тепловую способность справляться со своей мощностью/тепловыделением в худшем случае при максимальном значении V IN и полной нагрузке. Так что размеры линейного регулятора и его радиатора могут быть большими, особенно когда В О намного меньше, чем В В . На рис. 5 видно, что максимальный КПД линейного регулятора пропорционален отношению V O /V IN .
Рисунок 5. Максимальная эффективность линейного регулятора по сравнению с V O /V IN Соотношение
С другой стороны, линейный регулятор может быть очень эффективным, если V O близко к V В . Однако у линейного регулятора (LR) есть еще одно ограничение, заключающееся в минимальной разнице напряжений между V IN и V O . Транзистор в LR должен работать в линейном режиме. Таким образом, требуется определенное минимальное падение напряжения между коллектором и эмиттером биполярного транзистора или стоком и истоком полевого транзистора. Когда V O слишком близко к V IN , LR больше не сможет регулировать выходное напряжение. Линейные регуляторы, которые могут работать с низким запасом мощности (V IN – V O ) называются регуляторами с малым падением напряжения (LDO).
Также ясно, что линейный регулятор или LDO могут обеспечить только понижающее преобразование DC/DC. В приложениях, требующих, чтобы напряжение V O было выше, чем напряжение V IN , или требуется отрицательное напряжение V O из положительного напряжения V IN , линейные регуляторы, очевидно, не работают.
Линейный регулятор с разделением тока для большой мощности [8]
Для приложений, требующих большей мощности, регулятор должен быть установлен отдельно на радиаторе для отвода тепла. В системах с поверхностным монтажом это невозможно, поэтому ограничение рассеиваемой мощности (например, 1 Вт) ограничивает выходной ток. К сожалению, прямое параллельное подключение линейных регуляторов для распределения генерируемого тепла затруднено.
Замена источника опорного напряжения, показанного на рис. 3, на прецизионный источник тока позволяет напрямую подключить линейный регулятор для распределения нагрузки по току и, таким образом, распределения рассеиваемого тепла между ИС. Это позволяет использовать линейные стабилизаторы в приложениях с высоким выходным током для поверхностного монтажа, где только ограниченное количество тепла может быть рассеяно в любом месте на плате. LT3080 — это первый регулируемый линейный стабилизатор, который можно использовать параллельно для более высоких токов. Как показано на рис. 6, он имеет внутренний источник тока 10 мкА с током нулевой точности, подключенный к неинвертирующему входу операционного усилителя. С внешним одиночным задающим резистором напряжения R SET , выходное напряжение линейного регулятора можно регулировать от 0 В до (V IN – V DROPOUT ).
Это позволяет использовать линейные стабилизаторы в приложениях с высоким выходным током для поверхностного монтажа, где только ограниченное количество тепла может быть рассеяно в любом месте на плате. LT3080 — это первый регулируемый линейный стабилизатор, который можно использовать параллельно для более высоких токов. Как показано на рис. 6, он имеет внутренний источник тока 10 мкА с током нулевой точности, подключенный к неинвертирующему входу операционного усилителя. С внешним одиночным задающим резистором напряжения R SET , выходное напряжение линейного регулятора можно регулировать от 0 В до (V IN – V DROPOUT ).
Рис. 6. Настройка одиночного резистора LDO LT3080 с прецизионным источником тока, эталон
На рис. 7 показано, как просто подключить LT3080 параллельно для разделения тока. Просто соедините выводы SET микросхем LT3080 вместе, и оба регулятора будут иметь одинаковое опорное напряжение. Поскольку операционные усилители точно подогнаны, напряжение смещения между регулировочным штифтом и выходом составляет менее 2 мВ. В этом случае балластное сопротивление всего 10 мОм, которое может быть суммой небольшого внешнего резистора и сопротивления дорожки печатной платы, необходимо для балансировки тока нагрузки с более чем 80-процентным уравновешенным распределением. Нужно еще больше мощности? Разумно даже параллельное подключение от 5 до 10 устройств.
В этом случае балластное сопротивление всего 10 мОм, которое может быть суммой небольшого внешнего резистора и сопротивления дорожки печатной платы, необходимо для балансировки тока нагрузки с более чем 80-процентным уравновешенным распределением. Нужно еще больше мощности? Разумно даже параллельное подключение от 5 до 10 устройств.
Рис. 7. Параллельное соединение двух линейных стабилизаторов LT3080 для увеличения выходного тока
Области применения, в которых предпочтительны линейные регуляторы
Существует множество приложений, в которых линейные регуляторы или LDO представляют собой превосходные решения для импульсных источников питания, в том числе:
- Простые/недорогие решения. Решения с линейным регулятором или LDO просты и удобны в использовании, особенно для маломощных приложений с низким выходным током, где тепловая нагрузка не является критической. Внешняя индуктивность не требуется.
- Применения с низким уровнем шума/пульсаций.
 Для чувствительных к шуму приложений, таких как средства связи и радиоустройства, минимизация шума питания очень важна. Линейные стабилизаторы имеют очень низкую пульсацию выходного напряжения, потому что нет частых включений и выключений элементов, а линейные стабилизаторы могут иметь очень широкую полосу пропускания. Таким образом, существует небольшая проблема с электромагнитными помехами. Некоторые специальные LDO, такие как семейство LDO Analog Devices LT1761, имеют на выходе шумовое напряжение всего 20 мкВ RMS . Практически невозможно для SMPS достичь такого низкого уровня шума. SMPS обычно имеет выходную пульсацию в милливольтах даже с конденсаторами с очень низким ESR.
Для чувствительных к шуму приложений, таких как средства связи и радиоустройства, минимизация шума питания очень важна. Линейные стабилизаторы имеют очень низкую пульсацию выходного напряжения, потому что нет частых включений и выключений элементов, а линейные стабилизаторы могут иметь очень широкую полосу пропускания. Таким образом, существует небольшая проблема с электромагнитными помехами. Некоторые специальные LDO, такие как семейство LDO Analog Devices LT1761, имеют на выходе шумовое напряжение всего 20 мкВ RMS . Практически невозможно для SMPS достичь такого низкого уровня шума. SMPS обычно имеет выходную пульсацию в милливольтах даже с конденсаторами с очень низким ESR. - Быстрые переходные приложения. Контур обратной связи линейного регулятора обычно является внутренним, поэтому внешняя компенсация не требуется. Как правило, линейные регуляторы имеют более широкую полосу пропускания контура управления и более быструю переходную характеристику, чем у SMPS.

- Приложения с низким отсевом. Для приложений, где выходное напряжение близко к входному напряжению, LDO могут быть более эффективными, чем SMPS. Существуют LDO с очень малым падением напряжения (VLDO), такие как Analog Devices LTC1844, LT3020 и LTC3025, с диапазоном от 20 мВ до 9 мВ.Падение напряжения 0 мВ и ток до 150 мА. Минимальное входное напряжение может составлять всего 0,9 В. Поскольку в LR нет коммутационных потерь по переменному току, КПД LR или LDO при малой нагрузке аналогичен КПД при полной нагрузке. SMPS обычно имеет более низкую эффективность легкой нагрузки из-за потерь при переключении переменного тока. В приложениях с батарейным питанием, в которых эффективность легкой нагрузки также имеет решающее значение, LDO может обеспечить лучшее решение, чем SMPS.
Таким образом, разработчики используют линейные регуляторы или LDO, потому что они просты, малошумны, недороги, просты в использовании и обеспечивают быструю переходную характеристику. Если V O близок к V IN , LDO может быть более эффективным, чем SMPS.
Основные сведения об импульсном источнике питания
Зачем использовать импульсный источник питания?
Быстрый ответ — высокая эффективность. В SMPS транзисторы работают в режиме переключения, а не в линейном режиме. Это означает, что когда транзистор включен и проводит ток, падение напряжения на его пути питания минимально. Когда транзистор выключен и блокирует высокое напряжение, ток через его цепь питания почти отсутствует. Таким образом, полупроводниковый транзистор подобен идеальному переключателю. Таким образом, потери мощности в транзисторе сведены к минимуму. Высокий КПД, низкое рассеивание мощности и высокая удельная мощность (малый размер) являются основными причинами, по которым разработчики используют импульсные источники питания вместо линейных стабилизаторов или LDO, особенно в сильноточных приложениях. Например, в настоящее время 12V IN , 3.3V OUT синхронный понижающий источник питания с режимом переключения обычно может достигать эффективности >90% по сравнению с менее чем 27,5% у линейного регулятора. Это означает потерю мощности или уменьшение размера как минимум в восемь раз.
Это означает потерю мощности или уменьшение размера как минимум в восемь раз.
Самый популярный блок питания — понижающий преобразователь
На Рисунке 8 показан простейший и наиболее популярный импульсный регулятор — понижающий DC/DC преобразователь. Он имеет два режима работы, в зависимости от того, включен или выключен транзистор Q1. Для упрощения обсуждения все силовые устройства предполагаются идеальными. Когда ключ (транзистор) Q1 включен, напряжение коммутационного узла V SW = V IN и ток катушки индуктивности L заряжается (V IN – V O ). На рис. 8(а) показана эквивалентная схема в этом режиме зарядки катушки индуктивности. Когда переключатель Q1 выключен, ток катушки индуктивности проходит через безынерционный диод D1, как показано на рисунке 8(b). Напряжение коммутационного узла V SW = 0 В, а ток дросселя L разряжается нагрузкой V O . Поскольку идеальная катушка индуктивности не может иметь постоянное напряжение в установившемся режиме, среднее выходное напряжение V O можно указать как:
, где T ON – интервал времени включения в пределах периода переключения TS. Если отношение Т НА /Т S определить как коэффициент заполнения D, то выходное напряжение В О равно:
Если отношение Т НА /Т S определить как коэффициент заполнения D, то выходное напряжение В О равно:
Когда значения индуктивности фильтра L и выходного конденсатора C O достаточно высоки, выходное напряжение V O представляет собой напряжение постоянного тока с пульсацией только в милливольтах. В этом случае для входного понижающего источника питания 12 В концептуально рабочий цикл 27,5% обеспечивает выходное напряжение 3,3 В.
Рис. 8. Режимы работы понижающего преобразователя и типичные формы сигналов
Помимо описанного выше подхода к усреднению, существует еще один способ вывести уравнение рабочего цикла. Идеальная катушка индуктивности не может иметь постоянное напряжение в устойчивом состоянии. Таким образом, он должен поддерживать вольт-секундный баланс индуктора в течение периода переключения. В соответствии с формой сигнала напряжения катушки индуктивности на рисунке 8 для баланса вольт-секунд требуется:
Уравнение (5) такое же, как уравнение (3). Тот же самый подход к балансу вольт-секунд может быть использован для других топологий DC/DC для получения зависимости рабочего цикла от V IN и V O уравнения.
Тот же самый подход к балансу вольт-секунд может быть использован для других топологий DC/DC для получения зависимости рабочего цикла от V IN и V O уравнения.
Потери мощности в понижающем преобразователе
Потери проводимости постоянного тока
С идеальными компонентами (нулевое падение напряжения во включенном состоянии и нулевые потери при переключении) идеальный понижающий преобразователь имеет 100% КПД. В действительности рассеивание мощности всегда связано с каждым силовым компонентом. В SMPS есть два типа потерь: потери проводимости постоянного тока и потери переключения переменного тока.
Потери проводимости понижающего преобразователя в основном возникают из-за падения напряжения на транзисторе Q1, диоде D1 и катушке индуктивности L, когда они проводят ток. Чтобы упростить обсуждение, пульсации переменного тока индуктора не учитываются в следующем расчете потерь проводимости. Если в качестве силового транзистора используется МОП-транзистор, потери проводимости МОП-транзистора равны I O 2 • R DS(ON) • D, где R DS(ON) — сопротивление MOSFET Q1 в открытом состоянии. Потери мощности на проводимость диода равны I O • V D • (1 – D), где V D – прямое падение напряжения на диоде D1. Потери проводимости индуктора равны I O 2 • R DCR , где R DCR — сопротивление меди обмотки индуктора. Таким образом, потери проводимости понижающего преобразователя приблизительно равны:
Потери мощности на проводимость диода равны I O • V D • (1 – D), где V D – прямое падение напряжения на диоде D1. Потери проводимости индуктора равны I O 2 • R DCR , где R DCR — сопротивление меди обмотки индуктора. Таким образом, потери проводимости понижающего преобразователя приблизительно равны:
Например, входное напряжение 12 В, выходное напряжение 3,3 В/10 А MAX могут использовать следующие компоненты: МОП-транзистор R DS(ON) = 10 мОм, катушка индуктивности R DCR = 2 мОм, прямое напряжение диода V D = 0,5 В. Следовательно, потери проводимости при полной нагрузке составляют:
С учетом только потерь на проводимость КПД преобразователя составляет:
Приведенный выше анализ показывает, что обратный диод потребляет мощность потерь 3,62 Вт, что намного выше, чем потери проводимости MOSFET Q1 и катушки индуктивности L. Для дальнейшего повышения эффективности диод D1 можно заменить MOSFET Q2, как показано на рис. Рисунок 9. Этот преобразователь называется синхронным понижающим преобразователем. Затвор Q2 требует сигналов, дополняющих затвор Q1, т. е. Q2 включен только тогда, когда Q1 выключен. Потери проводимости синхронного понижающего преобразователя:
Рисунок 9. Этот преобразователь называется синхронным понижающим преобразователем. Затвор Q2 требует сигналов, дополняющих затвор Q1, т. е. Q2 включен только тогда, когда Q1 выключен. Потери проводимости синхронного понижающего преобразователя:
Если для Q2 также используется полевой МОП-транзистор R DS(ON) MOSFET сопротивлением 10 мОм, потери проводимости и КПД синхронного понижающего преобразователя составляют:
Приведенный выше пример показывает, что синхронный понижающий преобразователь более эффективен, чем обычный понижающий преобразователь, особенно для приложений с низким выходным напряжением, когда рабочий цикл мал, а время проводимости диода D1 велико.
Рис. 9. Синхронный понижающий преобразователь и его сигналы транзисторного затвора
Потери при переключении переменного тока
В дополнение к потерям проводимости по постоянному току существуют другие потери мощности, связанные с переменным током/переключением из-за неидеальных силовых компонентов:
- Коммутационные потери MOSFET.
 Реальный транзистор требует времени для включения или выключения. Таким образом, во время переходных процессов включения и выключения напряжения и тока перекрываются, что приводит к коммутационным потерям переменного тока. На рис. 10 показаны типичные сигналы переключения MOSFET Q1 в синхронном понижающем преобразователе. Зарядка и разрядка паразитного конденсатора C 9 верхнего полевого транзистора Q1.0704 GD с зарядом Q GD определяют большую часть времени переключения Q1 и связанные с ним потери. В синхронном понижающем транзисторе коммутационные потери нижнего полевого транзистора Q2 малы, потому что Q2 всегда включается после того, как его внутренний диод проводит, и выключается до того, как его внутренний диод проводит, в то время как падение напряжения на корпусном диоде низкое. Однако заряд обратного восстановления внутреннего диода транзистора Q2 также может увеличить коммутационные потери верхнего полевого транзистора Q1 и вызвать звон коммутационного напряжения и электромагнитные помехи.
Реальный транзистор требует времени для включения или выключения. Таким образом, во время переходных процессов включения и выключения напряжения и тока перекрываются, что приводит к коммутационным потерям переменного тока. На рис. 10 показаны типичные сигналы переключения MOSFET Q1 в синхронном понижающем преобразователе. Зарядка и разрядка паразитного конденсатора C 9 верхнего полевого транзистора Q1.0704 GD с зарядом Q GD определяют большую часть времени переключения Q1 и связанные с ним потери. В синхронном понижающем транзисторе коммутационные потери нижнего полевого транзистора Q2 малы, потому что Q2 всегда включается после того, как его внутренний диод проводит, и выключается до того, как его внутренний диод проводит, в то время как падение напряжения на корпусном диоде низкое. Однако заряд обратного восстановления внутреннего диода транзистора Q2 также может увеличить коммутационные потери верхнего полевого транзистора Q1 и вызвать звон коммутационного напряжения и электромагнитные помехи. Уравнение (12) показывает, что потери переключения полевого транзистора управления Q1 пропорциональны частоте переключения преобразователя f С . Точный расчет потерь энергии E ON и E OFF для Q1 не прост, но его можно найти в примечаниях по применению поставщиков МОП-транзисторов.
Уравнение (12) показывает, что потери переключения полевого транзистора управления Q1 пропорциональны частоте переключения преобразователя f С . Точный расчет потерь энергии E ON и E OFF для Q1 не прост, но его можно найти в примечаниях по применению поставщиков МОП-транзисторов. - Потери в сердечнике дросселя P SW_CORE . Реальная катушка индуктивности также имеет потери переменного тока, которые зависят от частоты коммутации. Потери переменного тока в индукторе в основном связаны с потерями в магнитном сердечнике. В высокочастотном SMPS материалом сердечника может быть порошковое железо или феррит. Как правило, сердечники из порошкового железа насыщают мягко, но имеют высокие потери в сердечнике, в то время как ферритовый материал насыщает более резко, но имеет меньшие потери в сердечнике. Ферриты представляют собой керамические ферромагнитные материалы, которые имеют кристаллическую структуру, состоящую из смесей оксида железа с оксидом марганца или цинка.
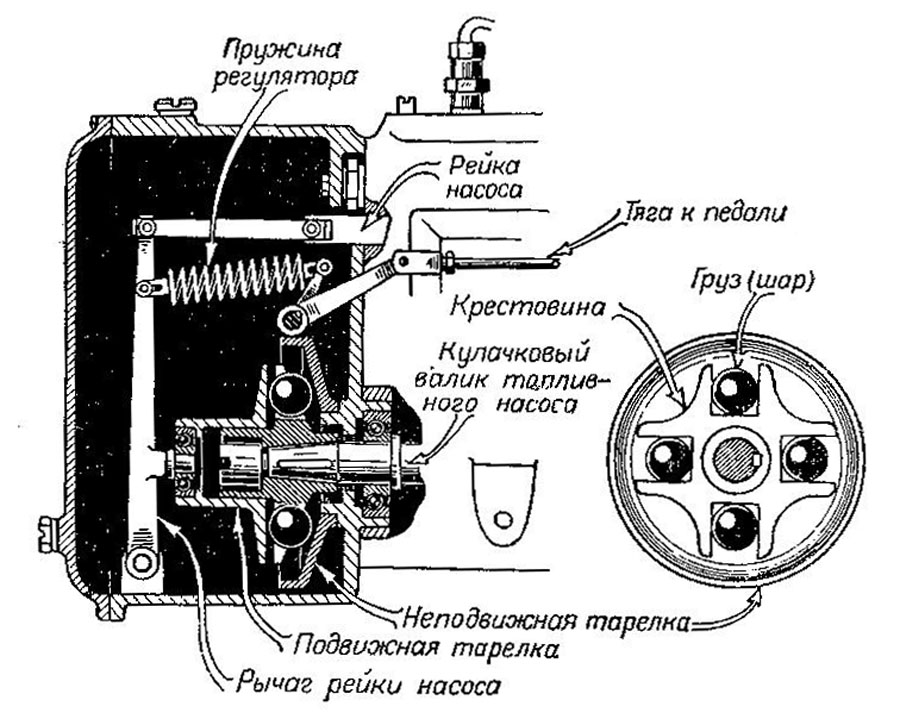 Потери в сердечнике в основном связаны с потерями на магнитный гистерезис. Производитель сердечника или катушки индуктивности обычно предоставляет данные о потерях в сердечнике разработчикам источников питания для оценки потерь в катушке индуктивности переменного тока.
Потери в сердечнике в основном связаны с потерями на магнитный гистерезис. Производитель сердечника или катушки индуктивности обычно предоставляет данные о потерях в сердечнике разработчикам источников питания для оценки потерь в катушке индуктивности переменного тока. - Другие потери, связанные с переменным током. Другие потери, связанные с переменным током, включают потери драйвера затвора P SW_GATE , что равно V DRV • Q G • f S , и мертвое время (когда оба верхних полевых транзистора Q1 и нижний полевой транзистор Q2 выключены) корпусной диод потеря проводимости, равная (ΔT ON + ΔT OFF ) • V D(Q2) • f S . Таким образом, потери, связанные с переключением, включают: Расчет потерь, связанных с переключением, обычно непрост. Потери, связанные с переключением, пропорциональны частоте переключения f С . В синхронном понижающем преобразователе 12 В IN , 3,3 В O / 10 А MAX потери переменного тока приводят к снижению эффективности примерно от 2% до 5% при частоте коммутации 200–500 кГц.
 Таким образом, общий КПД составляет около 93% при полной нагрузке, что намного лучше, чем у источников LR или LDO. Уменьшение тепла или размера может быть близко к 10x.
Таким образом, общий КПД составляет около 93% при полной нагрузке, что намного лучше, чем у источников LR или LDO. Уменьшение тепла или размера может быть близко к 10x.
Рис. 10. Типичная форма сигнала переключения и потери в верхнем полевом транзисторе Q1 в понижающем преобразователе
Рекомендации по проектированию переключающих силовых компонентов
Оптимизация частоты переключения
Как правило, более высокая частота переключения означает меньшие размеры компонентов выходного фильтра L и C O . В результате размер и стоимость блока питания могут быть уменьшены. Более высокая пропускная способность также может улучшить переходную реакцию нагрузки. Однако более высокая частота коммутации также означает более высокие потери мощности, связанные с переменным током, что требует большего пространства на плате или радиатора для ограничения тепловой нагрузки. В настоящее время для приложений с выходным током ≥10 А большинство понижающих источников питания работают в диапазоне частот от 100 кГц до 1 МГц ~ 2 МГц. При токе нагрузки < 10 А частота коммутации может достигать нескольких МГц. Оптимальная частота для каждой конструкции является результатом тщательного компромисса между размером, стоимостью, эффективностью и другими параметрами производительности.
Выбор выходной катушки индуктивности
В синхронном понижающем преобразователе размах пульсаций тока дросселя можно рассчитать как:
При заданной частоте коммутации низкая индуктивность дает большие пульсации тока и приводит к большим пульсациям выходного напряжения. Большие пульсации тока также увеличивают среднеквадратичные потери тока и проводимости MOSFET. С другой стороны, высокая индуктивность означает большой размер катушки индуктивности и возможные высокие DCR катушки индуктивности и потери проводимости. Как правило, при выборе катушки индуктивности выбирают 10% ~ 60% размаха тока пульсаций по отношению к максимальному коэффициенту постоянного тока. Поставщики индукторов обычно указывают номинальные значения постоянного тока, среднеквадратичного значения тока (нагрев) и тока насыщения. Важно спроектировать максимальный постоянный ток и пиковый ток катушки индуктивности в пределах максимальных значений, указанных поставщиком.
Выбор силового МОП-транзистора
При выборе полевого МОП-транзистора для понижающего преобразователя сначала убедитесь, что его максимальное значение V DS выше, чем напряжение питания V IN(MAX) с достаточным запасом. Однако не выбирайте полевой транзистор с чрезмерно высоким номинальным напряжением. Например, для питания 16 В IN(MAX) хорошо подходит полевой транзистор с номинальным напряжением 25 В или 30 В. Полевой транзистор с номинальным напряжением 60 В может быть избыточным, поскольку сопротивление полевого транзистора во включенном состоянии обычно увеличивается с увеличением номинального напряжения. Затем сопротивление открытого транзистора R DS(ON) и заряд затвора Q G (или Q GD ) являются двумя наиболее важными параметрами. Обычно существует компромисс между зарядом затвора Q G и сопротивлением в открытом состоянии R DS(ON) . В общем, полевой транзистор с кремниевым кристаллом небольшого размера имеет низкое значение Q G , но высокое сопротивление в открытом состоянии R DS(ON) , в то время как полевой транзистор с большим кремниевым кристаллом имеет низкое значение R DS(ON) , но большое значение Q . Г . В понижающем преобразователе верхний полевой МОП-транзистор Q1 принимает на себя как потери проводимости, так и потери переключения переменного тока. Низкий Q G FET обычно требуется для Q1, особенно в приложениях с низким выходным напряжением и малым рабочим циклом. Синхронный полевой транзистор Q2 нижней стороны имеет небольшие потери переменного тока, поскольку он обычно включается или выключается, когда его напряжение V DS близко к нулю. В этом случае низкий уровень R DS(ON) важнее, чем Q G для синхронного полевого транзистора Q2. Когда один полевой транзистор не может справиться с полной мощностью, можно использовать несколько полевых МОП-транзисторов параллельно.
Выбор входного и выходного конденсатора
Во-первых, конденсаторы должны быть выбраны с достаточным снижением напряжения.
Входной конденсатор понижающего преобразователя имеет пульсирующий ток переключения с большими пульсациями. Следовательно, входной конденсатор должен выбираться с достаточным номинальным среднеквадратичным значением пульсаций тока, чтобы обеспечить его срок службы. Алюминиевые электролитические конденсаторы и керамические конденсаторы с низким ESR обычно используются параллельно на входе.
Выходной конденсатор определяет не только пульсации выходного напряжения, но и переходные характеристики нагрузки. Пульсации выходного напряжения можно рассчитать по уравнению (15). Для высокопроизводительных приложений как ESR, так и общая емкость важны для минимизации пульсаций выходного напряжения и оптимизации переходных характеристик нагрузки. Обычно хорошим выбором являются танталовые конденсаторы с низким ESR, полимерные конденсаторы с низким ESR и многослойные керамические конденсаторы (MLCC).
Закрыть контур регулирования с обратной связью
Еще один важный этап проектирования импульсного источника питания — замыкание контура регулирования схемой управления с отрицательной обратной связью. Обычно это гораздо более сложная задача, чем использование LR или LDO. Требуется хорошее понимание поведения контура и конструкции компенсации для оптимизации динамических характеристик стабильного контура.
Модель слабого сигнала понижающего преобразователя
Как объяснялось выше, импульсный преобразователь меняет свой режим работы в зависимости от состояния переключателя ВКЛ или ВЫКЛ. Это дискретная и нелинейная система. Для анализа контура обратной связи линейным методом управления необходимо линейное моделирование малых сигналов [1][3]. Из-за выходного LC-фильтра линейная передаточная функция слабого сигнала рабочего цикла D к выходу V O на самом деле является системой второго порядка с двумя полюсами и одним нулем, как показано в уравнении (16). Имеются двойные полюса, расположенные на резонансной частоте выходного дросселя и конденсатора. Есть ноль, определяемый выходной емкостью и ESR конденсатора.
Управление режимом напряжения и управление режимом тока
Выходное напряжение можно регулировать с помощью замкнутой системы, показанной на рис. 11. Например, когда выходное напряжение увеличивается, напряжение обратной связи В FB увеличивается, а выходной сигнал усилителя ошибки отрицательной обратной связи уменьшается. Таким образом, рабочий цикл уменьшается. В результате выходное напряжение уменьшается, чтобы V FB = V REF . Схема компенсации операционного усилителя ошибки может быть сетью усилителя с обратной связью типа I, типа II или типа III [3][4]. Существует только один контур управления для регулирования выхода. Эта схема называется режимом управления по напряжению. Analog Devices LTC3775 и LTC3861 представляют собой типичные понижающие контроллеры с режимом напряжения.
Рис. 11. Блок-схема понижающего преобразователя, управляемого по напряжению
На рис. 12 показано синхронное понижающее напряжение на входе от 5 В до 26 В и на выходе 1,2 В/15 А с использованием понижающего контроллера LTC3775, работающего в режиме напряжения. Благодаря передовой архитектуре ШИМ-модуляции LTC3775 и очень низкому (30 нс) минимальному времени включения, источник питания хорошо работает для приложений, которые преобразуют высокое напряжение автомобильного или промышленного источника питания в низкое напряжение 1,2 В, требуемое современными микропроцессорами и программируемыми устройствами. логические микросхемы. Для приложений с большой мощностью требуются многофазные понижающие преобразователи с разделением тока. При управлении по напряжению требуется дополнительная петля распределения тока для балансировки тока между параллельными понижающими каналами. Типичным методом распределения тока для управления режимом напряжения является метод ведущий-ведомый. LTC3861 — это такой PolyPhase 9.0934 ® Контроллер режима напряжения. Его очень низкое, ±1,25 мВ, смещение измерения тока делает распределение тока между параллельными фазами очень точным, чтобы сбалансировать тепловую нагрузку. [10]
Рис. 12. Синхронный понижающий источник питания LTC3775 в режиме напряжения обеспечивает высокий коэффициент понижения
Управление в режиме тока использует два контура обратной связи: внешний контур напряжения, аналогичный контуру управления преобразователей, управляемых режимом напряжения, и внутренний контур тока, который возвращает сигнал тока в контур управления. На рис. 13 показана концептуальная блок-схема понижающего преобразователя с управлением по пиковому току, который непосредственно измеряет выходной ток дросселя. При управлении по току ток индуктора определяется ошибкой выходного напряжения операционного усилителя. Индуктор становится источником тока. Следовательно, передаточная функция с выхода операционного усилителя V C , для подачи выходного напряжения V O становится однополюсной системой. Это значительно упрощает компенсацию петли. Компенсация контура управления меньше зависит от нуля ESR выходного конденсатора, поэтому можно использовать все керамические выходные конденсаторы.
Рис. 13. Блок-схема понижающего преобразователя с управлением по току
Существует множество других преимуществ управления текущим режимом. Как показано на рисунке 13, поскольку пиковый ток дросселя ограничен операционным усилителем V C цикл за циклом, система управления режимом тока обеспечивает более точное и быстрое ограничение тока в условиях перегрузки. Пусковой ток катушки индуктивности также хорошо контролируется во время запуска. Кроме того, ток дросселя не меняется быстро при изменении входного напряжения, поэтому источник питания имеет хорошие переходные характеристики. При параллельном подключении нескольких преобразователей с управлением режимом тока также очень легко распределять ток между источниками питания, что важно для надежных сильноточных приложений с использованием понижающих преобразователей PolyPhase. В общем, преобразователь с управлением по току более надежен, чем преобразователь с управлением по напряжению.
Решение схемы управления текущим режимом должно точно определять ток. Сигнал измерения тока обычно представляет собой небольшой сигнал на уровне десятков милливольт, чувствительный к шуму переключения. Поэтому необходима правильная и тщательная разводка печатной платы. Токовая петля может быть замкнута путем измерения тока катушки индуктивности через измерительный резистор, падения напряжения DCR катушки индуктивности или падения напряжения проводимости полевого МОП-транзистора. К типичным контроллерам токового режима относятся Analog Devices LTC3851A, LTC3855, LTC3774 и LTC3875.
Постоянная частота и постоянное управление временем включения
Типичные схемы режима напряжения и режима тока в разделе «Управление режимом напряжения и управление режимом тока» имеют постоянную частоту переключения, генерируемую внутренними часами контроллера. Эти контроллеры с постоянной частотой переключения можно легко синхронизировать, что является важной особенностью сильноточных понижающих контроллеров PolyPhase. Однако, если переходный процесс, повышающий нагрузку, возникает сразу после выключения управляющего затвора Q1 полевого транзистора, преобразователь должен ждать все время выключения Q1 до следующего цикла, чтобы отреагировать на переходный процесс. В приложениях с малыми рабочими циклами задержка в наихудшем случае близка к одному циклу переключения.
В таких приложениях с низким рабочим циклом постоянное управление в режиме долины тока во включенном состоянии имеет более короткую задержку для реагирования на переходные процессы, повышающие нагрузку. В установившемся режиме частота коммутации постоянно включенных понижающих преобразователей практически фиксирована. В случае переходного процесса частота переключения может быстро изменяться для ускорения переходного процесса. В результате источник питания имеет улучшенные переходные характеристики и выходную емкость, а связанные с этим затраты могут быть снижены.
Однако при постоянном контроле времени включения частота коммутации может меняться в зависимости от сети или нагрузки. LTC3833 — это понижающий контроллер тока долины с более сложной архитектурой управления по времени — вариант архитектуры управления с постоянным временем включения с той разницей, что время включения управляется таким образом, что частота переключения остается постоянной на установившемся этапе. условия под линией и под нагрузкой. Благодаря этой архитектуре контроллер LTC3833 имеет минимальное время включения 20 нс и позволяет выполнять понижающие приложения до 38 В IN до 0,6 В O . Контроллер может быть синхронизирован с внешними часами в диапазоне частот от 200 кГц до 2 МГц. На рис. 14 показан типичный источник питания LTC3833 с входным напряжением от 4,5 В до 14 В и выходным напряжением 1,5 В/20 А. [11] На рис. 15 показано, что источник питания может быстро реагировать на внезапные переходные процессы нагрузки с высокой скоростью нарастания. Во время переходного процесса повышения нагрузки частота переключения увеличивается, чтобы обеспечить более быструю переходную реакцию. Во время переходного процесса понижения нагрузки рабочий цикл падает до нуля. Поэтому только выходной индуктор ограничивает скорость нарастания тока. В дополнение к LTC3833, для нескольких выходов или приложений PolyPhase, LTC3838 и LTC3839контроллеры обеспечивают быстрые переходные, многофазные решения.
Рис. 14. Быстрый источник питания в режиме тока с контролируемым временем с использованием LTC3833
Рис. 15. Блок питания LTC3833 обеспечивает быстрое реагирование при переходных процессах с быстрым скачком нагрузки
Полоса пропускания и стабильность цикла
Хорошо спроектированный SMPS работает бесшумно как в электрическом, так и в акустическом отношении. Это не относится к системе с недостаточной компенсацией, которая имеет тенденцию быть нестабильной. К типичным признакам недокомпенсированного источника питания относятся: слышимый шум от магнитных компонентов или керамических конденсаторов, дрожание сигналов переключения, колебания выходного напряжения и т. д. Система с перекомпенсацией может быть очень стабильной и тихой, но за счет медленного переходного процесса. Такая система имеет частоту кроссовера контура на очень низких частотах, обычно ниже 10 кГц. Конструкции с медленными переходными характеристиками требуют чрезмерной выходной емкости для удовлетворения требований по регулированию переходных процессов, что увеличивает общую стоимость и размер поставки. Оптимальная схема компенсации контура стабильна и бесшумна, но не имеет чрезмерной компенсации, поэтому она также имеет быстрый отклик для минимизации выходной емкости. Аналоговые устройства AN149В статье подробно объясняются концепции и методы моделирования силовых цепей и проектирования контуров [3]. Моделирование слабых сигналов и проектирование компенсации контура могут быть трудными для неопытных разработчиков источников питания. Инструмент проектирования Analog Devices LTpowerCAD ™ обрабатывает сложные уравнения и значительно упрощает проектирование источников питания, особенно компенсацию контуров [5][6]. Инструмент моделирования LTspice ® объединяет все модели деталей Analog Devices и обеспечивает дополнительное моделирование во временной области для оптимизации проекта. Однако на стадии прототипа обычно необходимы стендовые испытания/проверка стабильности контура и переходных характеристик.
Как правило, работа замкнутого контура регулирования напряжения оценивается по двум важным параметрам: полосе пропускания контура и запасу устойчивости контура. Полоса пропускания контура количественно определяется частотой кроссовера f C , при которой коэффициент усиления контура T(s) равен единице (0 дБ). Запас устойчивости контура обычно количественно определяется запасом по фазе или запасом по усилению. Запас по фазе контура Φ m определяется как разница между общей фазовой задержкой T(s) и –180° на частоте кроссовера. Запас по усилению определяется разницей между усилением T(s) и 0 дБ на частоте, где общая фаза T(s) равна –180°. Для понижающего преобразователя обычно считается достаточным запас по фазе в 45 градусов и запас по усилению в 10 дБ. На рис. 16 показана типичная диаграмма Боде коэффициента усиления контура для токового режима LTC3829.12 В IN в 1 В O /60A 3-фазный понижающий преобразователь. В этом примере частота кроссовера составляет 45 кГц, а запас по фазе — 64 градуса. Запас усиления близок к 20 дБ.
Рис. 16. Инструмент проектирования LTpowerCAD обеспечивает простой способ оптимизации компенсации контура и переходной характеристики нагрузки (пример трехфазного понижающего преобразователя LTC3829 с одним выходом).
Понижающий преобразователь PolyPhase для сильноточных приложений
По мере того, как системы обработки данных становятся быстрее и крупнее, их процессоры и блоки памяти потребляют все больше тока при постоянно снижающемся напряжении. При таких высоких токах требования к источникам питания возрастают. В последние годы многофазные (многофазные) синхронные понижающие преобразователи широко используются для сильноточных и низковольтных источников питания благодаря их высокой эффективности и равномерному распределению тепла. Кроме того, с чередованием нескольких фаз понижающего преобразователя пульсирующий ток как на входе, так и на выходе может быть значительно уменьшен, что приводит к уменьшению входных и выходных конденсаторов, а также места на плате и стоимости.
В понижающих преобразователях PolyPhase чрезвычайно важны точное определение и распределение тока. Хорошее распределение тока обеспечивает равномерное распределение тепла и высокую надежность системы. Из-за присущей им возможности распределения тока в устойчивом состоянии и во время переходных процессов обычно предпочтительны вольтогасители с управлением режимом тока. Analog Devices LTC3856 и LTC3829 — это типичные понижающие контроллеры PolyPhase с точным определением и распределением тока. Несколько контроллеров могут быть соединены последовательно для 2-, 3-, 4-, 6- и 12-фазных систем с выходным током от 20 А до более 200 А.
O Сильноточный понижающий преобразователь с использованием LTC3829″ data-title=»A 3-Phase, Single V O Сильноточный понижающий преобразователь с использованием LTC3829″ data-class=»img-responsive»> Рисунок 17. 3-фазный , Single V O Сильноточный понижающий преобразователь с использованием LTC3829
Другие требования к высокопроизводительному контроллеру
От высокопроизводительного понижающего контроллера требуется множество других важных функций. Плавный пуск обычно необходим для контроля пускового тока во время пуска. Ограничение перегрузки по току и защелка при коротком замыкании могут защитить источник питания, когда выход перегружен или закорочен. Защита от перенапряжения защищает дорогостоящие нагрузочные устройства в системе. Чтобы свести к минимуму электромагнитные помехи системы, иногда контроллер необходимо синхронизировать с внешним тактовым сигналом. Для низковольтных и сильноточных приложений дистанционное измерение дифференциального напряжения компенсирует падение напряжения на сопротивлении печатной платы и точно регулирует выходное напряжение на удаленной нагрузке. В сложной системе со многими шинами выходного напряжения также необходимо упорядочивать и отслеживать различные шины напряжения.
Схема печатной платы
Выбор компонентов и проектирование схемы — это только половина процесса проектирования поставки. Правильная компоновка печатной платы импульсного источника питания всегда имеет решающее значение. На самом деле, его важность невозможно переоценить. Хорошая компоновка оптимизирует эффективность подачи, снижает тепловую нагрузку и, что наиболее важно, сводит к минимуму шум и взаимодействие между дорожками и компонентами. Для этого разработчику важно понимать пути прохождения тока и потоки сигналов в импульсном источнике питания. Обычно для приобретения необходимого опыта требуются значительные усилия. См. примечания по применению Analog Devices 136 и 139.для подробных обсуждений. [7][9]
Выбор различных решений — дискретные, монолитные и интегрированные источники питания
На уровне интеграции системные инженеры могут решить, следует ли выбрать решение с дискретным, монолитным или полностью интегрированным силовым модулем. На рис. 18 показаны примеры решений с дискретным и силовым модулем для типичных приложений питания в точке нагрузки. Дискретное решение использует микросхему контроллера, внешние МОП-транзисторы и пассивные компоненты для создания источника питания на системной плате. Основной причиной выбора дискретного решения является низкая стоимость спецификации компонентов (BOM). Однако это требует хороших навыков проектирования источников питания и относительно длительного времени разработки. В монолитном решении используется ИС со встроенными мощными полевыми МОП-транзисторами для дальнейшего уменьшения размера решения и количества компонентов. Это требует аналогичных дизайнерских навыков и времени. Полностью интегрированное решение с силовым модулем может значительно сократить усилия по проектированию, время разработки, размер решения и проектные риски, но, как правило, с более высокой стоимостью спецификации компонентов.
Рис. 18. Примеры (a) дискретного питания от 12 В IN до 3,3 В/10 А LTC3778; (b) Полностью интегрированный 16-вольтовый IN , двойной 13-амперный или одиночный 26-амперный микромодуль LTM4620 ® , понижающий регулятор
Другие базовые неизолированные топологии DC/DC SMPS
В этом примечании по применению понижающие преобразователи используются в качестве простого примера для демонстрации конструктивных соображений SMPS. Однако существует по крайней мере пять других основных топологий неизолированных преобразователей (повышающий, понижающий/повышающий, преобразователи Cuk, SEPIC и Zeta) и по крайней мере пять основных топологий изолированных преобразователей (обратноходовые, прямые, двухтактные, полумостовые и полномостовые). ), которые не рассматриваются в данных указаниях по применению. Каждая топология обладает уникальными свойствами, которые делают ее пригодной для конкретных приложений. Рисунок 19показаны упрощенные схемы для других неизолированных топологий SMPS.
Рис. 19. Другие базовые топологии неизолированных преобразователей постоянного тока в постоянный
Существуют и другие неизолированные топологии SMPS, представляющие собой комбинации базовых топологий. Например, на рис. 20 показан высокоэффективный синхронный повышающе-понижающий преобразователь с 4 ключами на основе контроллера токового режима LTC3789. Он может работать с входным напряжением ниже, равным или выше выходного напряжения. Например, вход может быть в диапазоне от 5В до 36В, а выход может быть регулируемым 12В. Эта топология представляет собой комбинацию синхронного понижающего преобразователя и синхронного повышающего преобразователя с общим дросселем. Когда В IN > V OUT , переключатели A и B работают как активный синхронный понижающий преобразователь, в то время как переключатель C всегда выключен, а переключатель D всегда включен. Когда V IN < V OUT , переключатели C и D работают как активный синхронный повышающий преобразователь, в то время как переключатель A всегда включен, а переключатель B всегда выключен. Когда V IN близок к V OUT , все четыре переключателя работают активно. В результате этот преобразователь может быть очень эффективным, с КПД до 98% для типичного приложения с выходным напряжением 12 В. [12] Контроллер LT8705 еще больше расширяет диапазон входного напряжения до 80 В. Для упрощения конструкции и увеличения удельной мощности LTM4605/4607/4609дополнительно интегрируйте сложный повышающе-понижающий преобразователь в простой в использовании силовой модуль высокой плотности. [13] Их можно легко подключить параллельно с разделением нагрузки для приложений с высокой мощностью.
Рис. 20. Высокоэффективный повышающе-понижающий преобразователь с 4 переключателями, работающий при входном напряжении ниже, равном или выше выходного напряжения
Резюме
Таким образом, линейные регуляторы просты и удобны в использовании. Поскольку их транзисторы с последовательной регулировкой работают в линейном режиме, эффективность питания обычно низка, когда выходное напряжение намного ниже входного. Как правило, линейные стабилизаторы (или LDO) имеют низкие пульсации напряжения и быструю переходную характеристику. С другой стороны, импульсные источники питания работают на транзисторе как на переключателе и поэтому обычно намного эффективнее линейных регуляторов. Однако проектирование и оптимизация SMPS более сложны и требуют дополнительных знаний и опыта. Каждое решение имеет свои преимущества и недостатки для конкретных приложений.
использованная литература
[1] В. Форпериан, «Упрощенный анализ ШИМ-преобразователей с использованием модели ШИМ-переключателя: части I и II», IEEE Transactions on Aerospace and Electronic Systems, март 1990 г., Vol. 26, №2.
[2] Р. Б. Ридли, Б. Х. Чо, Ф. К. Ли, «Анализ и интерпретация коэффициентов усиления импульсных регуляторов с многоконтурным управлением», IEEE Transactions on Power Electronics, стр. 489-498, 19 октября.88.
[3] Х. Чжан, «Моделирование и схема компенсации контура импульсных источников питания», Замечания по применению линейной технологии AN149, 2015.
[4] Х. Дин Венейбл, «Оптимальный дизайн усилителя с обратной связью для систем управления», Технический документ Венейбл.
[5] Х. Чжан, «Проектирование блоков питания за пять простых шагов с помощью инструмента проектирования LTpowerCAD», Замечания по применению линейных технологий AN158, 2015.
[6] Инструмент проектирования LTpowerCAD ™ на сайте www.linear.com/LTpowerCAD.
[7] Х. Чжан, «Вопросы компоновки печатных плат для неизолированных импульсных источников питания», Примечание по применению 136, Linear Technology Corp. , 2012.
[8] Р. Добкин, «Регулятор с малым падением напряжения может быть напрямую подключен для распределения тепла», LT Journal of Analog Innovation, октябрь 2007 г.
[9] К. Куек, «Схема блока питания и электромагнитные помехи», Замечания по применению линейной технологии AN139, 2013 г.
[10] М. Субраманиан, Т. Нгуен и Т. Филлипс, «Измерение тока DCR субмиллионного сопротивления с точным разделением многофазного тока для сильноточных источников питания», LT Journal, январь 2013 г.
[11] Б. Абесингха, «Быстрый и точный понижающий DC/DC-контроллер, преобразующий 24 В напрямую в 1,8 В на частоте 2 МГц», LT Journal, октябрь 2011 г.
[12] Т. Бьорклунд, «Высокоэффективный повышающе-понижающий контроллер с 4 переключателями обеспечивает точное ограничение выходного тока», Замечания по проектированию линейной технологии 499.
[13] J. Sun, S. Young и H. Zhang, «Регулятор µModule подходит для (почти) полного решения Buck-Boost в 15 мм × 15 мм × 2,8 мм для 4,5–36 В на выходе 0,8–34 В», LT Журнал, март 2009 г.
Автор
Генри Чжан
Генри Чжан (Henry Zhang) — директор по приложениям ADI Power by Linear™. Он получил B.S.E.E. степень Чжэцзянского университета, Китай, в 1994 г. и его степень магистра. и доктор философии получил степень в области электротехники в Политехническом институте Вирджинии при Государственном университете, Блэксбург, Вирджиния, в 1998 и 2001 годах соответственно. Он работает в компании Linear Technology (теперь часть ADI) с 2001 года.
Что такое импульсный регулятор?
1. Основная роль Импульсный стабилизатор (преобразователь постоянного тока) — это регулятор (стабилизированный источник питания). Импульсный регулятор может преобразовывать входное напряжение постоянного тока (DC) в желаемое напряжение постоянного тока (DC).
В электронном или другом устройстве импульсный регулятор берет на себя функцию преобразования напряжения от батареи или другого источника питания в напряжения, требуемые последующими системами.
Как показано на рисунке ниже, импульсный стабилизатор может создавать выходное напряжение (V OUT ), которое выше (повышающее, повышающее), ниже (понижающее, понижающее) или имеет полярность, отличную от полярности выходного напряжения. входное напряжение (В В ).
2. Типы импульсных регуляторовИмпульсный стабилизатор — это регулятор (стабилизированный источник питания), и существуют следующие типы импульсных регуляторов.
| Регулятор (стабилизированный источник питания) | Переключатель Регулятор (DC-DC преобразователь) | Изолированный импульсный регулятор | ||
| Неизолированный импульсный регулятор | ||||
| Линейный регулятор | Шунтовой регулятор | |||
| LDO-регулятор | ||||
В этой статье дается подробное объяснение особенностей и работы «неизолированных импульсных регуляторов».
Неизолированные импульсные регуляторы также используют следующие системы и режимы работы.
| Система преобразования напряжения | Понижающий, повышающий, повышающий/понижающий, инвертирующий |
|---|---|
| Система выпрямления | Асинхронный, синхронный |
| Режим работы | Переключение ЧИМ, ШИМ, ЧИМ/ШИМ |
Нажмите на термин, чтобы узнать больше.
3. Характеристики импульсного регулятораНиже приводится описание характеристик неизолированного импульсного стабилизатора.
Высокая эффективностьВключая и выключая переключающий элемент, импульсный регулятор обеспечивает высокоэффективное преобразование электроэнергии, поскольку он подает необходимое количество электроэнергии только тогда, когда это необходимо.
Линейный регулятор — это еще один тип регулятора (стабилизированный источник питания), но поскольку он рассеивает любые излишки в виде тепла в процессе преобразования напряжения между V IN и V OUT , он не так эффективен, как импульсный стабилизатор.
Самый простой способ объяснить, как импульсный регулятор может эффективно преобразовывать напряжение, — это сравнить его с линейным регулятором.
Например, если входное напряжение (V IN ) равно 5,0 В, выходное напряжение (V OUT ) составляет 2,5 В, а ток нагрузки (I OUT ) составляет 0,1 А,
в линейном регуляторе
Входная мощность = входное напряжение × ток нагрузки
= 5,0 В × 0,1A
= 0,5 Вт
Выходная мощность = выходное напряжение × ток нагрузки
= 2,5 В × 0,1A
= 0,25 Вт
мощность ÷ потребляемая мощность, КПД линейного регулятора 50%.
Импульсный регулятор, однако, управляет периодом подачи входного напряжения, включая и выключая переключающий элемент, так что V OUT становится 2,5 В. Этот период времени подачи входного напряжения составляет
V OUT V IN = 2.5V 5.0V = 1 2
Отсюда мы видим, что напряжение подается на полпериода. Аналогично, если попытаться получить КПД из входной и выходной мощности, то получим следующее:
Входная мощность = входное напряжение × ток нагрузки × 1 2
= 5,0 В × 0,1 А × 1 2
= 0,25 Вт
Входная мощность = выходное напряжение × ток нагрузки
= 2,5 В × 0,1 А
Рассчитав КПД по приведенному выше уравнению: КПД = Выходная мощность ÷ Входная мощность, получаем значение 100%. Вот почему импульсный регулятор обеспечивает высокий КПД.
*Поскольку есть реальные потери, истинная цифра около 90%.
Операции ВКЛ/ВЫКЛ переключающего элемента в импульсном стабилизаторе вызывают внезапные изменения напряжения и тока, а также паразитные составляющие, вызывающие звон, все из которых вносят шум в выходное напряжение.
Использование соответствующей компоновки платы эффективно снижает уровень шума. Например, оптимизация размещения конденсатора и катушки индуктивности и/или проводки. Для получения дополнительной информации о механизме возникновения шума (звона) и способах его контроля см. рекомендации по применению «Меры противодействия шуму понижающего импульсного регулятора».
Сравнение характеристик импульсного регулятора и линейного регулятора
| Импульсный регулятор | Линейный регулятор | |
| Система преобразования выходного напряжения | Понижающий, повышающий, повышающий/понижающий, инвертирующий | Только понижающий; V OUT должно быть меньше, чем V IN |
| Эффективность | Высокий (незначительное выделение тепла) | Сравнительно низкое (высокое тепловыделение) Низкое, когда разница между входным и выходным напряжением велика |
| Выходной ток | Большой (высокий КПД означает большой ток) | Маленький |
| Шум | Большой | Маленький |
| Выходная пульсация | Подарок | Нет |
| Необходимые внешние компоненты | Многие C IN , C АУТ , Л, (СБД) | Несколько C IN , C OUT |
Сверхкомпактный преобразователь постоянного тока, идеально подходящий для автомобильных камер
| Номинальное напряжение 45 В, низкая пульсация | Интернет-магазин (Образец покупки) |
|---|---|
S-19902/3 Серия Технический паспорт |
Для промышленного оборудования и бытовой техники
| Вход 12/24 В, сверхкомпактный | Интернет-магазин (Образец покупки) |
|---|---|
S-8580/1 Серия Технический паспорт |
Для IoT / носимых устройств
| Сверхвысокая эффективность при небольшой нагрузке, компактность | Интернет-магазин (Образец покупки) |
|---|---|
Серия S-85M0A Технический паспорт |
> Принципы работы и режимы импульсного регулятора
> Введение. ИС импульсных регуляторов (ИС преобразователей постоянного тока)
Линейные и импульсные регуляторы напряжения: введение
Изучите основы как простых линейных регуляторов, так и более сложных импульсных регуляторов.
Опубликовано
Регуляторы напряжения являются неотъемлемой частью большинства электронных устройств. Функция регулятора напряжения заключается в обеспечении стабильного напряжения на выходе регулятора, в то время как входное напряжение может изменяться.
Регуляторы (а также зарядные устройства) можно разделить на линейные или импульсные. Поскольку линейные регуляторы гораздо проще понять, начнем с них, а затем перейдем к более сложным импульсным регуляторам.
Содержание
Линейные регуляторы Линейные стабилизаторы можно рассматривать как устройства с переменным сопротивлением, внутреннее сопротивление которых изменяется для поддержания постоянного выходного напряжения. В действительности переменное сопротивление обеспечивается с помощью транзистора, управляемого контуром обратной связи усилителя.
Линейные регуляторы обычно состоят как минимум из трех контактов — входного входа, выходного контакта и контакта заземления.
Внешние конденсаторы размещаются на входных и выходных клеммах для обеспечения фильтрации и улучшения переходных характеристик при внезапных изменениях нагрузки. Выходной конденсатор также необходим для стабильности цепи обратной связи регулятора напряжения.
Количество тока, протекающего через регулятор, и количество энергии, рассеиваемой в устройстве, будут влиять на выбор корпуса устройства и требования к радиатору.
Линейные регуляторы гораздо менее эффективны, чем импульсные регуляторы, и поэтому расходуют больше энергии, которая рассеивается в виде тепла.
Если устройство будет рассеивать более 100 мВт, рекомендуется провести более тщательный тепловой анализ с учетом максимальной рабочей температуры и теплового сопротивления корпуса ИС (известного как Theta-JA).
Если регулятор указывает тета-JA 50°C/Вт, это означает, что температура самой микросхемы (называемая температурой перехода) будет повышаться на 50°C на каждый ватт рассеиваемой мощности.
Большинство интегральных схем рассчитаны на температуру перехода до 125°C. Так, например, если регулятор с тета-JA 50°C/Вт рассеивает 1 Вт, то максимальная температура окружающей среды, в которой он может использоваться, будет 125°C – 50°C = 75°C.
Для линейных регуляторов требуется входное напряжение, превышающее выходное. Минимальная разница уровней напряжения между входом и выходом называется падением напряжения. Для обычного линейного регулятора напряжения падение напряжения составляет около 2 вольт.
Регуляторы с малым падением напряжения (LDO) могут регулировать до уровня менее 100 мВ. Однако их способность подавлять шумы и пульсации на входе будет значительно снижена ниже примерно 500 мВ.
Для большинства приложений линейный стабилизатор, или, точнее, регулятор LDO, имеет больше смысла, если входное напряжение не превышает выходное напряжение более чем на пару вольт.
В противном случае регулятор будет тратить слишком много энергии, и лучше использовать более эффективный импульсный регулятор.
Линейные регуляторы имеют три основных преимущества. Они просты, дешевы и обеспечивают исключительно «чистое» выходное напряжение.
Импульсные регуляторыИмпульсные регуляторы преобразуют одно напряжение в другое, временно накапливая энергию, а затем высвобождая эту накопленную энергию на выходе с другим напряжением.
Термины «преобразователь постоянного тока в постоянный», «импульсный источник питания» (SMPS), «импульсный регулятор» и «импульсный преобразователь» относятся к одному и тому же. Они работают, управляя твердотельным устройством, таким как транзистор или диод, которое действует как переключатель.
Переключатель прерывает подачу тока к компоненту накопления энергии, такому как конденсатор или катушка индуктивности, для преобразования одного напряжения в другое.
Существует много типов топологий импульсных стабилизаторов, включая три наиболее распространенных:
Понижающие (понижающие) импульсные регуляторы
Понижающий преобразователь может понижать более высокое напряжение на входе до более низкого напряжения. на выходе. Это похоже на линейный регулятор, за исключением того, что понижающий регулятор потребляет гораздо меньше энергии.
Если входное напряжение намного выше, чем желаемое выходное напряжение, понижающий стабилизатор обычно предпочтительнее линейного регулятора.
Повышающие импульсные регуляторы
Повышающий преобразователь способен развивать более высокое напряжение на выходе, чем на входе. Например, повышающий преобразователь можно использовать для получения постоянного напряжения 5 В или 12 В постоянного тока от одной литий-ионной батареи на 3,7 В постоянного тока.
Понижающий/повышающий (понижающий/повышающий) импульсный регулятор
Понижающий/повышающий преобразователь, как вы могли догадаться, способен обеспечивать фиксированное выходное напряжение из входного напряжения, которое может изменяться выше и ниже выходного Напряжение.
Этот тип регулятора напряжения очень удобен в оборудовании с батарейным питанием, где входное напряжение со временем падает.
Самая простая топология — это просто описанная выше схема понижающего преобразователя, за которой следует схема повышающего преобразователя. Две катушки индуктивности соединены последовательно, поэтому их можно объединить в одну катушку индуктивности.
В этом уроке я разрабатываю печатную плату с использованием простого линейного стабилизатора, а в этом более подробном курсе я разрабатываю пользовательскую плату с использованием более сложного импульсного стабилизатора.
Сводка общих спецификаций для регуляторов напряжения Независимо от того, является ли стабилизатор напряжения линейным регулятором или импульсным регулятором, разработчикам необходимо базовое понимание параметров, характеризующих работу регулятора.
Выходное напряжение: Выходное напряжение может быть фиксированным или регулируемым. Если фиксировано, напряжение устанавливается внутри устройства, и вы покупаете конкретный номер детали для желаемого выходного напряжения.
Если регулятор регулируемого типа, напряжение обычно устанавливается делителем напряжения, состоящим из двух резисторов. Это обеспечивает некоторую гибкость, но за счет дополнительных компонентов.
Входное напряжение: Необходимо строго соблюдать указанные минимальное и максимальное входное напряжение. Они просто не будут работать ниже минимального напряжения и будут повреждены при работе выше максимального напряжения.
Токовый выход: Максимальный ток, который может обеспечить регулятор напряжения, ограничен и обычно определяется пропускной способностью внутреннего силового транзистора. Все решения для регуляторов IC включают встроенную схему ограничения тока для предотвращения повреждений.
Пульсации на выходе или Коэффициент ослабления источника питания (PSRR): Пульсации на выходе относятся к небольшим колебаниям выходного напряжения. Величину пульсаций выходного напряжения очень важно учитывать, поскольку многие типы схем будут чувствительны к любому шуму на их входном питании.
Линейные регуляторы подавляют входные пульсации без добавления дополнительных пульсаций. Их способность подавлять пульсации определяется коэффициентом подавления источника питания (PSRR). Чем выше PSRR, тем лучше линейный регулятор подавляет любые пульсации входного напряжения.
Импульсные регуляторы, с другой стороны, создают пульсации на выходе из-за своей природы переключения. Величину пульсаций импульсного преобразователя можно уменьшить путем фильтрации и тщательного выбора компонентов.
Обычный метод проектирования заключается в использовании импульсного регулятора для понижения напряжения питания с минимальным рассеиванием мощности, а затем линейного регулятора для устранения любых пульсаций.
Многие малошумящие линейные стабилизаторы с высоким PSRR имеют дополнительный вывод, обычно называемый выводом NR или выводом для подавления шума. Размещение конденсатора емкостью около 10 нФ на этом выводе для заземления помогает отфильтровать шум и пульсации внутреннего источника опорного напряжения и, следовательно, выходного напряжения.
Шум: Многие электронные компоненты, такие как резисторы и транзисторы, также производят основной физический шум, который обычно путают с пульсациями. Шум будет проявляться как случайные колебания выходного напряжения по сравнению с пульсациями, которые будут проявляться в виде небольшого периодического сигнала.
Хотя это и не связано с пульсациями, те же методы, которые уменьшают пульсации на выходе, также обычно уменьшают шум – в основном, это использование шумоподавляющего конденсатора.
Регулировка нагрузки: Регулирование нагрузки относится к способности регулятора поддерживать стабильное выходное напряжение при изменении тока нагрузки. Эта спецификация часто указывается в описании устройства в виде графика зависимости выходного напряжения от тока нагрузки.
Переходная нагрузка: Это мера реакции выходного напряжения на резкое скачкообразное изменение тока нагрузки. Обычно имеет место небольшое превышение или понижение выходного напряжения, когда схема стабилизатора пытается восстановиться и обеспечить стабильное выходное напряжение.
Регулирование линии: Колебания входного напряжения регулятора могут вызывать колебания выходного напряжения, а регулирование линии является мерой этих изменений.
Переходный процесс в линии: Это мера реакции выходного напряжения на резкое скачкообразное изменение входного напряжения. Как и при переходных процессах нагрузки, выходное напряжение будет иметь небольшой выброс или понижение, поскольку петля обратной связи регулятора реагирует на внезапное изменение. Регуляторы с высоким значением PSRR (т. е. с низкими пульсациями на выходе) обычно имеют наилучшие переходные характеристики в линии.
Падение напряжения: Падение напряжения для классических линейных стабилизаторов, таких как серии LM317 или LM78xx, составляет около 2 вольт. Это означает, что входное напряжение должно быть как минимум на 2 вольта выше, чем выходное напряжение для работы регулятора.
Регуляторы с малым падением напряжения (LDO) могут работать с гораздо меньшей разницей входного и выходного напряжения. Например, семейство стабилизаторов с малым падением напряжения TPS732 имеет диапазон входного напряжения от 1,7 до 5,5 В и падение напряжения 40 мВ при 250 мА.
Эффективность: Эффективность — это мера того, сколько энергии тратится регулятором впустую. Как упоминалось ранее, линейный регулятор расходует гораздо больше энергии, чем импульсный стабилизатор. Это означает, что линейный регулятор имеет гораздо более низкий КПД. КПД можно рассчитать, разделив выходную мощность на входную мощность.
Таким образом, если выходная мощность такая же, как и входная мощность, тогда КПД составляет 100%, и регулятор не тратит энергию впустую. Это идеальный, но недостижимый сценарий. Большинство импульсных регуляторов имеют КПД 80-90%.
Эффективность линейного регулятора зависит от отношения входного напряжения к выходному напряжению. Это связано с тем, что для линейного регулятора входной ток всегда практически идентичен выходному току.
Поскольку мощность равна напряжению, умноженному на ток, токи в уравнении КПД компенсируются, оставляя только напряжения. Это означает, что чем больше разница между входным и выходным напряжением, тем хуже эффективность линейного регулятора.
Так, например, для линейного регулятора с входным напряжением 5 В постоянного тока и выходным напряжением 3,3 В постоянного тока КПД составляет:
Эффективность = 3,3 В постоянного тока / 5 В постоянного тока = 66% КПД падает до
Эффективность = 3,3 В постоянного тока / 12 В постоянного тока = 27,5%
, что означает, что 72,5% мощности тратится линейным регулятором впустую!
Основное преимущество регуляторов с малым падением напряжения заключается в том, что они обеспечивают выходное напряжение, очень близкое к входному напряжению, что означает, что эффективность регулятора намного выше.
Например, при генерировании выходного напряжения 3,3 В постоянного тока от литий-ионной батареи 3,7 В постоянного тока требуется LDO с падением напряжения менее 400 мВ. При этих напряжениях КПД составляет 3,3 В постоянного тока / 3,7 В постоянного тока = 89%, что сравнимо с высокоэффективным понижающим стабилизатором.
В отличие от линейного стабилизатора, идеальный импульсный стабилизатор будет иметь эффективность 100%, что означает, что входная мощность равна выходной мощности. Это означает, что входной ток никогда не будет таким же, как выходной ток.
На самом деле, входной ток всегда будет меньше, чем выходной ток для понижающего регулятора, и всегда будет выше, чем выходной ток для повышающего регулятора.
Выходной конденсатор: Размер выходного конденсатора имеет решающее значение как для линейных, так и для импульсных стабилизаторов, поэтому обязательно следуйте рекомендациям, приведенным в техническом описании. В большинстве случаев керамический конденсатор (с тепловым классом X7R или X5R) является лучшим выбором.
Керамические конденсаторы имеют очень низкое паразитное сопротивление (так называемое эквивалентное последовательное сопротивление или ESR), которое обычно улучшает переходную характеристику регулятора. Будьте осторожны, потому что некоторые регуляторы требуют использования танталовых конденсаторов с более высоким ESR, чтобы стабилизировать контур управления обратной связью.
Электромагнитные помехи (EMI)Одной из проблем при проектировании импульсных источников питания является возможность возникновения электромагнитных помех (EMI).
Переключение активного устройства, которое может происходить на частотах от сотен килогерц до нескольких мегагерц, может генерировать широкий спектр излучений. Эти излучения могут передаваться и излучаться на расположенное рядом оборудование, вызывая вредные помехи или даже собственные помехи.
Имейте в виду, что разводка печатной платы для импульсного стабилизатора очень критична, гораздо важнее, чем для линейного регулятора. Поэтому обязательно внимательно следуйте рекомендациям по компоновке в таблице данных.
Если в техническом описании выбранного вами импульсного стабилизатора не указаны рекомендации по компоновке, я настоятельно рекомендую выбрать другой стабилизатор.
ЗаключениеКогда энергоэффективность не имеет значения или когда входное напряжение лишь немного превышает выходное, лучшим выбором обычно является линейный регулятор. Линейные регуляторы обычно дешевле, менее сложны и требуют меньше компонентов.
Если требуется действительно чистое выходное напряжение без пульсаций, линейный регулятор также является лучшим выбором.
С другой стороны, если эффективность энергопотребления является ключевой проблемой или входное напряжение намного выше желаемого выходного напряжения, то лучшим выбором будет понижающий преобразователь.
Если требуется более высокое выходное напряжение, чем входное, выбор прост — только повышающий стабилизатор может выполнить этот трюк.
Как и во всех аспектах проектирования, между различными решениями всегда есть компромиссы. Во многих случаях лучшим решением является импульсный регулятор, за которым следует линейный регулятор. Таким образом, вы получаете лучшее из обоих миров: эффективность и сверхчистое выходное напряжение.
Другой контент, который может вам понравиться:
5 4 голосов
Рейтинг статьи
Как правильно выбрать стабилизатор(ы) напряжения для вашей конструкции
В этой статье показано, как выбрать лучший тип стабилизатора напряжения для вашего конкретного электронного продукта.
Вероятно, более чем для 90% продуктов требуется какой-либо регулятор напряжения, что делает их одним из наиболее часто используемых электрических компонентов.
Если вы не можете работать напрямую от аккумулятора или от внешнего адаптера переменного/постоянного тока, вам потребуется регулятор напряжения. Скорее всего, потребуется несколько регуляторов напряжения.
Эта статья поможет вам правильно выбрать стабилизатор(ы) напряжения для вашей конструкции. Мы рассмотрим все, от определения типа регулятора напряжения, который вам нужен, до выбора того, который соответствует вашим конкретным требованиям.
Содержание
Выбор типа стабилизатора, который необходимо использовать
Первым шагом в выборе правильного регулятора напряжения является определение входного напряжения, выходного напряжения и максимального тока нагрузки.
Несмотря на то, что существует множество других спецификаций, эти три помогут вам начать работу и сузить круг выбора нужного вам типа регулятора.
Регуляторы напряжения можно разделить на две широкие категории:
- Понижающие : Выходное напряжение ниже входного
- Повышение : Выводит напряжение выше входного напряжения
Знание ваших входных и выходных напряжений поможет вам легко решить, к какой группе относится ваш регулятор.
Регуляторы напряжения, для которых выходное напряжение меньше входного, являются наиболее распространенным типом регуляторов напряжения. Например, вы вводите 5 В, а на выходе 3,3 В, или вводите 12 В, а на выходе 5 В.
Необходимо рассмотреть два типа регуляторов:
- Линейные регуляторы : Простые, дешевые и бесшумные, но могут иметь низкую энергоэффективность. Линейные регуляторы способны только понижать напряжение.
- Импульсные регуляторы : Высокая энергоэффективность, но более сложные и дорогие, с большим шумом на выходе. Импульсные стабилизаторы могут использоваться как для понижения, так и для повышения напряжения.
Если вам требуется выходное напряжение, которое меньше входного напряжения, начните с выбора линейного стабилизатора, а не импульсного стабилизатора.
Рисунок 1. Линейный регулятор использует транзистор и контур управления с обратной связью для регулирования выходного напряжения. Линейный регулятор может только производить выходное напряжение ниже, чем входное напряжение.
Линейные стабилизаторы намного дешевле и проще в использовании, чем импульсные регуляторы, поэтому они, как правило, должны быть вашим первым выбором.
Единственный случай, когда вы не хотите использовать линейный регулятор, это если рассеиваемая мощность слишком высока или вам нужно повысить напряжение.
Определение рассеиваемой мощности
Несмотря на то, что линейные регуляторы дешевы и просты в использовании, их основным недостатком является то, что они могут тратить много энергии впустую. Это может привести к чрезмерному разряду батареи, перегреву или повреждению устройства.
Если у вас аккумуляторный продукт, в котором энергия расходуется в виде тепла, батарея будет разряжаться быстрее. Если это не аккумуляторный продукт, но он по-прежнему выделяет значительное количество тепла, это все равно может вызвать другие проблемы с вашей конструкцией.
На самом деле, при определенных условиях линейный регулятор может выделять столько тепла, что фактически разрушает сам себя. Очевидно, это не то, чем вы хотите заниматься.
При использовании линейного стабилизатора начните с определения того, какая мощность будет рассеиваться регулятором.
Для линейных регуляторов используйте уравнение:
Мощность = (входное напряжение – выходное напряжение) x ток (уравнение 1)
Можно предположить, что выходной ток (также называемый током нагрузки) приблизительно одинаков как входной ток для линейных регуляторов.
На самом деле входной ток равен сумме выходного тока и тока покоя, потребляемого линейным регулятором для выполнения функции регулирования.
Однако для большинства стабилизаторов ток покоя чрезвычайно мал по сравнению с током нагрузки, поэтому достаточно предположить, что выходной ток равен входному току.
Как видно из уравнения 1, если у вас большой перепад напряжения (Vin – Vout) на стабилизаторе и/или высокий ток нагрузки, то ваш стабилизатор будет рассеивать большое количество энергии.
Например, если на входе 12 В, а на выходе 3,3 В, разность напряжений будет рассчитываться как 12 В – 3,3 В = 8,7 В.
Если ток нагрузки 1 ампер, это означает, что регулятор должен рассеивать 8,7 Вт мощности. Это огромное количество энергии, которое тратится впустую, и это больше, чем может выдержать любой линейный регулятор.
Если, с другой стороны, у вас высокий перепад напряжения, но ток нагрузки составляет всего несколько миллиампер, то мощность будет небольшой.
Например, в приведенном выше случае, если вы теперь используете только 100 мА тока нагрузки, тогда рассеиваемая мощность падает до всего 0,87 Вт, что намного удобнее для большинства линейных регуляторов.
При выборе линейного стабилизатора недостаточно просто убедиться, что входное напряжение, выходное напряжение и ток нагрузки соответствуют спецификациям регулятора.
Например, у вас есть линейный стабилизатор, рассчитанный на 15 В и ток 1 А. Вы думаете: «Хорошо, если это так, я могу подать 12 В на вход, получить 3,3 В на выходе и запустить его на 1 А, верно?»
Неправильно! Вы должны убедиться, что линейный регулятор может справиться даже с такой мощностью. Способ сделать это состоит в том, чтобы определить, насколько регулятор будет нагреваться в зависимости от мощности, которую он должен рассеять.
Для этого сначала рассчитайте, сколько мощности будет рассеивать линейный регулятор, используя уравнение 1 выше.
Во-вторых, посмотрите в таблице данных регулятора в разделе «Тепловые характеристики» параметр под названием «Theta-JA», выраженный в единицах °C/Вт (°C на ватт).
Theta-JA указывает на количество градусов, на которое чип будет нагреваться выше температуры окружающего воздуха, на каждый ватт мощности, который он должен рассеять.
Просто умножьте расчетную рассеиваемую мощность на Theta-JA, и это покажет вам, насколько линейный регулятор будет нагреваться при такой мощности:
Мощность x Theta-JA = температура выше температуры окружающей среды (уравнение 2)
Допустим, ваш регулятор имеет спецификацию Theta-JA 50°C на ватт. Это означает, что если ваш продукт рассеивается:
- 1 Вт, нагревается до 50°C.
- 2 Вт нагреется до 100°C.
- ½ ватта нагреется до 25°C.
Важно отметить, что температура, рассчитанная выше, представляет собой разницу температур выше температуры окружающего воздуха.
Допустим, вы подсчитали, что при ваших условиях питания регулятор будет рассеивать 2 Вт мощности. Вы умножаете это на Theta-JA и определяете, что он нагреется до 100°C.
Здесь важно не забыть добавить температуру окружающего воздуха. Комнатная температура обычно составляет 25°C. Следовательно, вы должны добавить 25°C к 100°C. Теперь у вас до 125°C.
125°C — это максимальная температура, на которую рассчитано большинство электронных компонентов, поэтому никогда не следует намеренно превышать 125°C.
Как правило, вы не повредите свой продукт, пока не нагреетесь до 170–200 °C. К счастью, большинство регуляторов также имеют функцию отключения при перегреве, которая срабатывает при температуре около 150°C, поэтому они просто отключаются, прежде чем причинят какой-либо ущерб.
Однако некоторые регуляторы не имеют защиты от перегрева, поэтому вы можете повредить их, если они будут рассеивать слишком много энергии.
В любом случае, вы не хотите проектировать свой продукт таким образом, чтобы он постоянно перегревался и должен был выключаться для охлаждения.
Следует также учитывать, что температура воздуха не всегда может быть 25°C.
Допустим, ваш регулятор по-прежнему нагревается на 100°C под нагрузкой, но теперь температура окружающей среды составляет 50°C (например, в закрытом автомобиле в жаркий летний день).
Теперь у вас есть 50°C плюс 100°C и до 150°C при нагрузке. Вы превысили указанную максимальную температуру и находитесь на грани срабатывания теплового отключения.
Очевидно, этого следует избегать. Эксплуатация регулятора, при котором он регулярно превышает указанную температуру 125°C, может не привести к немедленному повреждению, но может сократить срок службы компонента.
Регуляторы с малым падением напряжения (LDO)
В некоторых случаях линейные регуляторы могут быть очень эффективными, потребляя очень мало энергии. Это происходит, когда они работают с очень низким перепадом входного напряжения и выходного напряжения.
Например, если Vin – Vout составляет всего 300 мВ, то даже при токе нагрузки 3 А рассеиваемая мощность составляет всего 0,9 Вт, что достаточно мало для большинства регуляторов.
Минимальный дифференциал Vin-Vout, с которым может работать линейный регулятор, называется падением напряжения. Если разница между Vin и Vout падает ниже напряжения отключения, то регулятор находится в режиме отключения.
Регулятор в режиме отключения выглядит просто как небольшой резистор от входа до выхода. Это означает, что выход, по сути, просто отслеживает входное питание, и на самом деле никакое регулирование не выполняется.
В большинстве случаев вы хотите избежать работы линейного регулятора в режиме отключения. Ни в коем случае это ничего не повредит, но вы потеряете многие преимущества наличия регулятора.
Например, если на вашем входном источнике есть много шума сигнала, он обычно отфильтровывается линейным регулятором. Однако эта фильтрация не будет выполняться в режиме отключения, поэтому весь шум входного питания напрямую передается выходному напряжению.
Причина, по которой стабилизаторы с малым падением напряжения так полезны, заключается в том, что они позволяют управлять регулятором с очень небольшой рассеиваемой мощностью. Это связано с тем, что линейный регулятор наиболее эффективен, когда разница между Vin и Vout мала.
Многие старые линейные стабилизаторы имели очень высокое падение напряжения. Например, популярная серия стабилизаторов 7800 имеет спецификацию падения напряжения 2 В. Это означает, что входное напряжение должно быть как минимум на 2 В выше, чем выходное напряжение.
Рисунок 2. Старые 3-выводные линейные стабилизаторы требуют большего перепада напряжения Vin-Vout и, следовательно, потребляют больше энергии, чем более новые стабилизаторы LDO.
Хотя 2 В не очень много, если вы пропускаете 1 ампер тока через этот регулятор и у вас есть разница в 2 В, то 2 ватта мощности тратятся впустую.
Более новые стабилизаторы LDO могут иметь очень низкое падение напряжения менее 200 мВ при полной нагрузке.
LDO, работающий с перепадом напряжения всего 200 мВ, может пропускать в 10 раз больший ток при той же рассеиваемой мощности, что и линейный регулятор, работающий с перепадом напряжения 2 В. Таким образом, 1 ампер тока с дифференциалом Vin-Vout 200 мВ соответствует рассеиваемой мощности всего 0,2 Вт.
Краткий обзор линейных регуляторов
Линейные регуляторы полезны, если:
- Разница между входным и выходным напряжением мала
- У вас низкий ток нагрузки
- Вам требуется очень чистое выходное напряжение
- Дизайн должен быть как можно более простым и дешевым
Как мы обсудим далее, импульсные стабилизаторы производят много шума на выходе и могут создавать нечеткое выходное напряжение.
Это может быть приемлемо для некоторых приложений, но во многих случаях требуется очень чистое напряжение питания. Например, при формировании напряжения питания для аналого-цифрового преобразователя или какой-либо звуковой схемы.
Таким образом, линейные стабилизаторы не только проще в использовании, но и обеспечивают гораздо более чистое выходное напряжение по сравнению с импульсными стабилизаторами, без пульсаций, скачков или шума любого типа.
Таким образом, если рассеиваемая мощность не слишком высока или вам не требуется повышающий регулятор, линейный регулятор будет лучшим вариантом.
Импульсные регуляторы
Импульсные регуляторы гораздо сложнее понять, чем линейные регуляторы. Линейный регулятор основан на силовом транзисторе, который управляет величиной тока, подаваемого на выход.
Если система управления линейного регулятора определяет, что выходное напряжение ниже, чем должно быть, то от входа к выходу может течь больший ток. И наоборот, если обнаружено, что выходное напряжение выше, чем должно быть, регулятор позволит меньшему току течь от входа к выходу, тем самым снижая выходное напряжение.
С другой стороны, импульсные стабилизаторы используют катушки индуктивности и конденсаторы для временного накопления энергии перед передачей ее на выход.
В этом уроке я разрабатываю печатную плату с использованием простого линейного стабилизатора, а в этом более подробном курсе я разрабатываю пользовательскую плату с использованием более сложного импульсного регулятора.
Существует два основных типа импульсных регуляторов: повышающий и понижающий.
Понижающий импульсный стабилизатор также называется понижающим регулятором, и, как и линейный стабилизатор, выходное напряжение ниже входного.
Рисунок 3. В понижающем импульсном регуляторе используется индуктор в качестве элемента временного накопления энергии для эффективного создания выходного напряжения ниже входного.
Если вы изначально планировали использовать линейный регулятор (понижающий), но определили, что рассеиваемая мощность слишком велика, тогда вам следует использовать импульсный понижающий стабилизатор.
В то время как повышающий импульсный стабилизатор создает выходное напряжение выше входного и называется повышающим стабилизатором.
Импульсные регуляторы очень эффективны даже при очень больших перепадах между входом и выходом.
Эффективность равна выходной мощности, деленной на входную мощность. Это отношение того, сколько мощности от входа переходит к выходу.
КПД = Pвых / Pin = (Vвых x Iвых) / (Vin x Iвх) (Уравнение 3)
Уравнение эффективности такое же, как и для линейного регулятора. Однако, поскольку выходной ток равен входному току для линейного регулятора, уравнение 3 упрощается до простого:
Эффективность (линейный регулятор) = Vout / Vin на входе 24 В, а на выходе 3 В при токе нагрузки 1 А. Если бы это был линейный регулятор, он работал бы с чрезвычайно низкой эффективностью, и почти вся мощность рассеивалась бы в виде тепла.
Эффективность линейного регулятора будет только 3 В / 24 В = 12,5%. Это означает, что только 12,5% мощности от входа доходит до выхода. Остальные 87,5% передаваемой мощности теряются в виде тепла!
С другой стороны, импульсные стабилизаторы обычно имеют КПД 90 % или выше независимо от разницы между входным и выходным напряжениями. Для импульсного регулятора около 90 % мощности передается на выход и только 10 % тратится впустую.
Только когда Vin и Vout близки друг к другу, эффективность линейного регулятора можно сравнить с импульсным регулятором.
Например, если входное напряжение 3,6 В (напряжение литий-полимерной батареи), а выходное 3,3 В, то линейный стабилизатор будет иметь энергоэффективность 3,3 В / 3,6 В = 91,7%.
Повышающие регуляторы напряжения
В большинстве случаев выходное напряжение будет ниже входного. В этом случае следует использовать линейный стабилизатор или понижающий импульсный регулятор, как обсуждалось выше.
Однако в других случаях может потребоваться более высокое выходное напряжение, чем входное. Например, если у вас есть батарея на 3,6 В, а вам нужен источник питания на 5 В.
Рис. 4. Импульсный импульсный стабилизатор использует катушку индуктивности в качестве временного накопительного элемента для эффективного создания выходного напряжения выше входного.
Многие новички в электронике с удивлением узнают, что можно получить более высокое напряжение из более низкого напряжения. Для выполнения этой функции необходим импульсный регулятор, называемый повышающим регулятором.
В отличие от линейных стабилизаторов, выходной ток импульсного стабилизатора не равен входному току. Вместо этого вы должны смотреть на входную мощность, выходную мощность и эффективность.
Рассчитаем входной ток для повышающего регулятора. Предположим, что входное напряжение равно 3 В, выходное напряжение равно 5 В, выходной ток равен 1 А, а КПД равен 90 % (как указано в техническом описании).
Чтобы понять это, нам нужно использовать немного базовой алгебры в уравнении 3, чтобы найти входную мощность:
Pin = Pout / Efficiency (уравнение 5)
Мы знаем, что эффективность составляет 90 % (или 0,90), и мы знаем, что выходная мощность составляет 5 В x 1 A = 5 Вт. Мы можем рассчитать, что входная мощность составляет 5 Вт / 0,9 = 5,56 Вт.
Поскольку входная мощность составляет 5,56 Вт, а выходная мощность составляет 5 Вт, это означает, что регулятор рассеивает только 0,56 Вт.
Далее, поскольку мы знаем, что мощность равна напряжению, умноженному на ток, это означает, что входной ток равен:
Входной ток = 5,56 Вт / Vin = 5,56 Вт / 3 В = 1,85 А (уравнение 6)
Для повышающего регулятора входной ток всегда будет выше, чем выходной ток. С другой стороны, входной ток понижающего стабилизатора всегда будет меньше выходного тока.
Понижающе-повышающие регуляторы
Предположим, вы питаете свой продукт от двух последовательно соединенных батареек типа АА. При полной зарядке две батареи AA могут выдавать около 3,2 В, но когда они близки к разрядке, они выдают только 2,4 В.
В этом случае ваше напряжение питания может варьироваться от 2,4 В до 3,2 В.
Теперь предположим, что вам нужно выходное напряжение ровно 3 В независимо от состояния батарей. Когда аккумуляторы полностью заряжены (выход 3,2 В), необходимо понизить напряжение аккумуляторов с 3,2 В до 3 В.
Однако, когда аккумуляторы близки к разрядке (выход 2,4 В), необходимо для повышения напряжения батареи с 2,4 В до 3 В.
В этом сценарии вы должны использовать так называемый повышающе-понижающий импульсный стабилизатор, который представляет собой просто комбинацию повышающего и понижающего регуляторов.
Для решения этой проблемы потенциально можно использовать отдельный понижающий регулятор, за которым следует повышающий регулятор (или наоборот). Но обычно лучше использовать один повышающе-понижающий регулятор.
Импульсный регулятор + линейные регуляторы
Помните о трех преимуществах линейных регуляторов: дешевизна, простота и чистое выходное напряжение.
Может быть много случаев, когда вы хотите использовать линейный стабилизатор, потому что вам нужно чистое выходное напряжение, но вы не можете, потому что они тратят слишком много энергии.
В этой ситуации вы можете использовать импульсный регулятор, а затем линейный регулятор.
Допустим, у вас есть входное напряжение от литий-полимерной батареи, равное 3,6 В, но вам нужен чистый источник питания 5 В.
Для этого вы должны использовать повышающий стабилизатор, чтобы повысить напряжение до значения, чуть превышающего целевое выходное напряжение. Например, вы можете использовать повышающий стабилизатор для повышения напряжения с 3,6 В до 5,5 В.
Затем вы используете линейный стабилизатор, который берет 5,5 В и понижает его до 5 В, а также устраняет шумы и помехи. пульсации для получения чистого сигнала.
Это очень распространенный метод получения эффективности импульсного стабилизатора и бесшумного выходного напряжения линейного стабилизатора.
Если вы выберете этот вариант и будете специально пытаться отфильтровать шум переключения, обязательно обратите внимание на коэффициент ослабления источника питания (PSRR) линейного регулятора.
PSSR заданного линейного регулятора зависит от частоты. Поэтому PSSR обычно представляют в виде графика, показывающего, как линейный регулятор подавляет любые пульсации на входе на различных частотах.
Рис. 5. Коэффициент ослабления источника питания (PSRR) в зависимости от частоты для TPS799 от Texas Instruments.
Чтобы использовать этот график, посмотрите на частоту переключения вашего импульсного стабилизатора (или любых других источников шума в вашей цепи). Затем посмотрите на PSSR линейного регулятора на этой конкретной частоте.
Затем вы можете рассчитать, какая часть шума от импульсного регулятора будет удалена линейным регулятором.
Резюме
Чтобы выбрать регулятор напряжения для вашей системы, начните с предположения, что линейный регулятор можно использовать, если входное напряжение выше выходного.
Только если при этом расходуется слишком много энергии, используйте понижающий импульсный регулятор.
Если вам нужно выходное напряжение выше входного, используйте повышающий импульсный регулятор.
Если у вас есть ситуация, когда входное напряжение может быть выше или ниже выходного напряжения, то вам нужен импульсный стабилизатор.
Наконец, если вам нужен чистый выход, но нужна энергоэффективность импульсного стабилизатора, используйте импульсный стабилизатор, а затем линейный стабилизатор для очистки напряжения питания.
Другой контент, который может вам понравиться:
4.9 7 голосов
Рейтинг статьи
Линейный регулируемый и импульсный источник питания | ОРЕЛ
Бытовым электронным устройствам, особенно устройствам с интегральными схемами, требуется надежный источник постоянного напряжения, который может обеспечивать питание в любое время без каких-либо перебоев. В этом блоге мы рассмотрим две топологии конструкции источников питания, которые следует рассмотреть для вашего следующего проекта: линейные регулируемые и импульсные источники питания. Выбранный вами источник питания в конечном итоге зависит от ваших требований к эффективности, занимаемому месту, регулированию мощности, переходному времени отклика и стоимости.
Линейный регулируемый источник питания
Линейные стабилизаторы были предпочтительными источниками питания до 1970-х годов для преобразования переменного тока (AC) в устойчивый постоянный ток (DC) для электронных устройств. Несмотря на то, что сегодня этот тип источника питания не используется так широко, он по-прежнему является лучшим выбором для приложений, требующих минимального уровня шума и пульсаций.
Они могут быть громоздкими, но линейные регулируемые источники питания бесшумны. (Источник изображения)
Как они работают
Основным компонентом, обеспечивающим работу линейного регулятора, является стальной или железный трансформатор. Этот трансформатор обеспечивает две функции:
- Он действует как барьер, отделяющий вход переменного тока высокого напряжения от входа постоянного тока низкого напряжения, который также отфильтровывает любые помехи, попадающие в выходное напряжение.
- Он снижает входное напряжение переменного тока со 115 В/230 В примерно до 30 В, которое затем можно преобразовать в постоянное напряжение постоянного тока.
Переменное напряжение сначала понижается трансформатором, а затем выпрямляется несколькими диодами. Затем оно сглаживается до низкого постоянного напряжения парой больших электролитических конденсаторов. Это низкое постоянное напряжение затем регулируется как постоянное выходное напряжение с использованием транзистора или интегральной схемы.
Вот блок питания с линейным стабилизатором. (Источник изображения)
Регулятор напряжения в линейном блоке питания работает как переменный резистор. Это позволяет изменять значение выходного сопротивления в соответствии с требованиями к выходной мощности. Поскольку регулятор напряжения постоянно сопротивляется току для поддержания напряжения, он также действует как рассеивающее устройство. Это означает, что полезная мощность постоянно теряется в виде тепла для поддержания постоянного уровня напряжения.
Трансформатор уже является крупным компонентом на печатной плате (PCB). Из-за постоянной мощности и тепловыделения блоку питания с линейным регулятором потребуется радиатор. Только эти два компонента делают устройство очень тяжелым и громоздким по сравнению с небольшим форм-фактором импульсного источника питания.
Предпочтительные приложения
Линейные стабилизаторыизвестны своей низкой эффективностью и большими размерами, но они обеспечивают бесшумное выходное напряжение. Это делает их идеальными для любого устройства, требующего высокой частоты и низкого уровня шума, например:
- Цепи управления
- Малошумящие усилители
- Сигнальные процессоры
- Автоматизированное и лабораторное испытательное оборудование
- Датчики и схемы сбора данных
Преимущества и недостатки
Источники питания с линейной стабилизацией могут быть громоздкими и неэффективными, но их низкий уровень шума идеально подходит для приложений, чувствительных к шуму. Некоторые преимущества и недостатки, которые следует учитывать для этой топологии, включают:
Преимущества
- Простое приложение . Линейные регуляторы могут быть реализованы в виде целого пакета и добавлены в схему только с двумя дополнительными фильтрующими конденсаторами. Это позволяет инженерам любого уровня подготовки с легкостью планировать и проектировать их с нуля.
- Низкая стоимость . Если вашему устройству требуется выходная мощность менее 10 Вт, то затраты на компоненты и производство намного ниже по сравнению с импульсными источниками питания.
- Низкий уровень шума/пульсаций . Линейные стабилизаторы имеют очень низкую пульсацию выходного напряжения и широкую полосу пропускания. Это делает их идеальными для любых чувствительных к шуму приложений, включая устройства связи и радио.
Недостатки
- Ограниченная гибкость . Линейные регуляторы можно использовать только для понижения напряжения. Для источника питания переменного/постоянного тока трансформатор с выпрямлением и фильтрацией необходимо будет разместить перед линейным источником питания, что увеличит общие затраты и усилия.
- Ограниченный выход . Источники питания с линейной стабилизацией обеспечивают только одно выходное напряжение. Если вам нужно больше, вам нужно будет добавить отдельный линейный регулятор напряжения на требуемый выход.
- Низкая эффективность . Среднее линейное регулируемое устройство достигает КПД 30-60% за счет рассеивания тепла. Это также требует добавления радиатора, который увеличивает размер и вес устройства.
В наше время энергоэффективных устройств низкий рейтинг эффективности линейного регулируемого источника питания может стать причиной сделки. Обычный блок питания с линейной стабилизацией будет работать с КПД около 60% при выходном напряжении 24 В. Когда вы рассматриваете входную мощность 100 Вт, вы видите 40 Вт потерянной мощности.
Прежде чем рассматривать возможность использования источника питания с линейной стабилизацией, мы настоятельно рекомендуем учитывать потери мощности, которые вы получите на пути от входа к выходу. Вы можете быстро оценить эффективность линейного регулятора по следующей формуле:
Импульсный источник питания (SMPS)
Импульсные источники питания были представлены в 1970-х годах и быстро стали самым популярным способом питания электронных устройств постоянным током. Что делает их такими замечательными? По сравнению с линейными регуляторами выделяются их высокая эффективность и производительность.
Типичный адаптер переменного тока включает блок питания с режимом переключения. (Источник изображения)
Как они работают
Импульсный источник питания регулирует выходное напряжение с помощью широтно-импульсной модуляции (ШИМ). Этот процесс создает высокочастотный шум, но обеспечивает высокую эффективность при небольшом форм-факторе. При подключении к сети переменного тока 115 В или 230 В переменного тока сначала выпрямляются и сглаживаются набором диодов и конденсаторов, что обеспечивает высокое постоянное напряжение. Это высокое постоянное напряжение затем понижается с помощью небольшого ферритового трансформатора и набора транзисторов. Процесс понижения по-прежнему сохраняет высокую частоту переключения между 200 кГц и 500 кГц.
Низкое напряжение постоянного тока, наконец, преобразуется в постоянный постоянный ток с помощью другого набора диодов, конденсаторов и катушек индуктивности. Любая регулировка, необходимая для поддержания постоянного выходного напряжения, выполняется путем регулировки ширины импульса высокочастотного сигнала. Этот процесс регулирования работает через цепь обратной связи, которая постоянно отслеживает выходное напряжение и при необходимости регулирует коэффициент включения/выключения ШИМ-сигнала.
Вот импульсный источник питания с гораздо большим количеством деталей, чем с линейным регулированием. (Источник изображения)
Предпочтительные приложения
Чаще всего импульсные блоки питания используются в приложениях, где важны срок службы батареи и температура, например:
- Электролиз, обработка отходов или применение топливных элементов
- Двигатели постоянного тока, игровые автоматы, авиация и морское оборудование
- Научно-исследовательское, производственное и испытательное оборудование
- Зарядка аккумуляторов для литий-ионных аккумуляторов, используемых в авиации и транспортных средствах
- Процессы гальваники, анодирования и гальванопластики
Преимущества и недостатки
Импульсные источники питания могут иметь более высокий КПД, чем линейные стабилизаторы, но их шум делает их плохим выбором для приложений радиосвязи и связи. Некоторые преимущества и недостатки, которые следует учитывать для этой топологии, включают:
Преимущества
- Малый форм-фактор . Понижающий трансформатор в SMPS работает на высокой частоте, что, в свою очередь, уменьшает его объем и вес. Это позволяет импульсному источнику питания иметь гораздо меньший форм-фактор, чем линейный стабилизатор.
- Высокая эффективность . Регулирование напряжения в импульсном источнике питания осуществляется без отвода избыточного количества тепла. Эффективность SMPS может достигать 85%-90%.
- Гибкие приложения . Дополнительные обмотки могут быть добавлены к импульсному источнику питания, чтобы обеспечить более одного выходного напряжения. Импульсный источник питания с трансформаторной изоляцией также может обеспечивать выходное напряжение, которое не зависит от входного напряжения.
Недостатки
- Сложная конструкция . По сравнению с линейными регуляторами планирование и проектирование импульсных источников питания обычно предназначено для специалистов по энергетике. Это не лучший источник питания для выбора, если вы планируете разработать свой собственный без тщательного изучения или опыта.
- Высокочастотный шум . Переключение МОП-транзистора в импульсном источнике питания приводит к появлению высокочастотных помех в выходном напряжении. Это часто требует использования радиочастотного экранирования и фильтров электромагнитных помех в устройствах, чувствительных к шуму.
- Более высокая стоимость . Для более низкой выходной мощности 10 Вт или менее дешевле использовать блок питания с линейной стабилизацией.
Импульсные блоки питания никуда не денутся и являются предпочтительным источником питания для приложений, не чувствительных к шуму. Сюда входят такие устройства, как зарядные устройства для мобильных телефонов, двигатели постоянного тока и многое другое.
Сравнение линейного регулятораи SMPS
Теперь мы собираемся провести окончательное сравнение между линейными регулируемыми и импульсными источниками питания при их параллельном сравнении. Некоторые из наиболее важных требований, которые необходимо учитывать, включая размер/вес, диапазон входного напряжения, рейтинг эффективности и уровень шума среди других факторов. Вот как это происходит:
Как спроектировать свой собственный В этом блоге нет возможности объяснить, как спроектировать линейный регулируемый или импульсный источник питания. Тем не менее, есть несколько руководств, которыми мы хотели бы поделиться. Имейте в виду, что проектирование SMPS требует высокого уровня сложности и не рекомендуется для новичков в области проектирования электроники. Руководства по проектированию линейных регулируемых источников питания
- Учебное пособие Джона Эррингтона по проектированию блоков питания
- Университет Невады, Лас-Вегас, проект линейного источника питания
- Инструкция по проектированию регулируемого линейного источника питания постоянного тока
Руководства по проектированию импульсных источников питания
- 7 важных шагов при проектировании импульсного источника питания
- Справочное руководство полуимпульсного источника питания ON
- Учебники по электронике Импульсный блок питания
Power OnБольшинство электронных устройств в наши дни должны преобразовывать сеть переменного тока в стабильное выходное напряжение постоянного тока. Для этой цели следует рассмотреть две топологии: линейные регулируемые и импульсные источники питания. Линейное регулирование идеально подходит для приложений, требующих низкого уровня шума, в то время как импульсные источники питания лучше подходят для портативных устройств, где важно время автономной работы и эффективность. При принятии решения о том, какую топологию выбрать, всегда учитывайте требуемый рейтинг эффективности, форм-фактор, выходную стабилизацию и требования к шуму. Готовы спроектировать свой первый линейный регулируемый или импульсный источник питания? Попробуйте Autodesk EAGLE бесплатно уже сегодня!