Дифференциально – трансформаторная связь. Исследование передачи показаний от вторичного прибора на первичный прибор дифференциально – трансформаторной связью
Лабораторная работа № 2
Дифференциально – трансформаторная связь
Цель работы: 1. Исследование передачи показаний от вторичного прибора на первичный прибор дифференциально – трансформаторной связью.
2. Приобретение практических навыков в работе с приборами с дифференциально – трансформаторной связью передачи показаний.
1. Теоретическая часть
В системе ГСП ( государственная система приборов ) для передачи информации от первичных приборов на вторичные приборы кроме частотных, токовых и цифровых сигналов имеется сигнал « взаимная индуктивность». Он равен 0 – 10 мГ или -10 – 0 – 10 мГ. Этот сигнал реализуется дифференциально-трансформаторная схемой.
В настоящее время дифференциально-трансформаторная
схема передачи сигнала от первичного прибора на вторичный прибор или автоматический
регулятор является устаревшей и в новых разработках не применяется.
Не смотря на это, дифференциально-трансформаторная схема передачи сигнала от первичного прибора на вторичный не потеряла своего практического значения т.к. на котельных установках созданных в восьмидесятые и девяностые годы прошлого века применялась во словном эта схема.
Схема основана на нулевом методе измерения с усилением и автоматическим уравновешиванием сигнала.
Принципиальная схема передачи показана на рис.1.
В схеме имеются две одинаковые катушки К1 и К2,
одна из которых находится в первичном, а вторая — во вторичном приборе. Каждая
катушка имеет первичную и две вторичные обмотки. Первичные обмотки включены последовательно
и питаются от трансформатора электронного усилителя У.
Стальной сердечник катушки К1механически соединен с чувствительным органом первичного прибора. В положении равновесия сердечник расположен симметрично по отношению к обеим вторичным обмоткам катушки К1. Электродвижущие силы e1 и е2, развиваемые обмотками, одинаковы по величине, но противоположны по фазе. Суммарная э. д. с. катушки в этом случае равна нулю:
∆е1 =
Аналогично включена катушка К2,
плунжер которой перемещается реверсивным двигателем РД, получающим питание
от усилителя У.
127В
К двигателю РД
Рис. 1 Дифференциально-трансформаторная схема передачи показаний датчика на вторичный прибор.
а — принципиальная схема; б — схема передачи от дифманометра типа ДМ-3583М, вторичный прибор типа КСД1.
В равновесном положении системы:
∆е2 = e3 – е4 =0. ( 2 )
Сигнал ∆е, подаваемый на вход усилителя, в этом положении также равен нулю:
∆е = ∆e1— ∆е2 =0. ( 3 )
Изменение положения плунжера датчика
вызывает нарушение равновесия системы, выраженного уравнением (3). На входе усилителя
появляется сигнал небаланса, величина которого зависит от хода плунжера, а фаза
— от направления смещения его от среднего положения. Этот сигнал усиливается с сохранением
фазы и с выхода усилителя подается к реверсивному двигателю РД. Двигатель
начинает вращаться и перемещать плунжер катушки K2 в направлении
уравновешивания электрической системы. При достижении равенства ∆e1=∆e2
сигнал ∆е на входе усилителя вновь станет равным нулю, реверсивный двигатель перестанет
вращаться и система придет в новое состояние равновесия. При этом одновременно с
воздействием на плунжер катушки К
Этот сигнал усиливается с сохранением
фазы и с выхода усилителя подается к реверсивному двигателю РД. Двигатель
начинает вращаться и перемещать плунжер катушки K2 в направлении
уравновешивания электрической системы. При достижении равенства ∆e1=∆e2
сигнал ∆е на входе усилителя вновь станет равным нулю, реверсивный двигатель перестанет
вращаться и система придет в новое состояние равновесия. При этом одновременно с
воздействием на плунжер катушки К
Наибольшее распространение получили следующие приборы с дифференциально-трансформаторной схемой передачи:
1. Дифференциальный манометр ДМ – 3583М, в качестве первичного прибора.
2. КСД 1, КСД2, КСД3, КСД4 — в качестве вторичного прибора.
Для согласования первичных приборов с дифференциальнотрансформаторной
схемой передачи сигнала с вторичными приборами, использующие токовые сигналы, используют
специальные приборы – адаптеры, преобразующие сигналы дифференциально – трансформаторной
схемы в токовые сигналы. Наиболее распространенными из них являются адаптеры типа:
ЭП 8007. Схема присоединения их показана на рис.2.
Наиболее распространенными из них являются адаптеры типа:
ЭП 8007. Схема присоединения их показана на рис.2.
Рис. 2 Подключение адаптера ЭП 8007.
2. Схема и описание лабораторной установки
В качестве первичного прибора с дифференциально — трансформаторной схемой передачи сигнала будем использовать дифференциальный манометр ДМ – 3583М. В качестве вторичного прибора – КСД1.
Конструкция дифференциальный манометр ДМ – 3583М показана на рис.3. Чувствительным элементом является мембранный блок, состоящий из мембранных коробок 4 и 7, ввернутых с обеих сторон в перегородку 6, зажатую между двумя крышками 3 и 19 с помощью стяжной муфты 5. При этом образуются две камеры — плюсовая (нижняя) и минусовая (верхняя).
Каждая из мембранных коробок сварена
из двух или четырех мембран, профили которых совпадают. Внутренние полости мембранных
коробок сообщаются между собой. Через ниппель 20 обе полости заполняются водным
раствором этиленгликоля, после чего ниппель заваривается.
Через ниппель 20 обе полости заполняются водным
раствором этиленгликоля, после чего ниппель заваривается.
Дифференциально-трансформаторные преобразователи и схемы дистанционной передачи
из «Теплотехнические измерения и приборы »
Дифференциально-трансформаторные преобразователи предназначены для преобразования линейного перемещения сердечника в выходной электрический параметр (сигнал). Переменным параметром у преобразователей этого типа является значение взаимной индуктивности между обмотками. Дифференциально-трансформаторные преобразователи широко применяются в первичных приборах (манометрах, дифманометрах и др.), рассматриваемых ниже, в качестве передающих и во вторичных приборах — в качестве компенсирующих. [c.305]Зависимость между значением взаимной индуктивности М и относительным перемещением сердечника / для неунифицированного дифференциально-трансформаторного преобразователя приведена на рис.
Первичные обмотки дифференциально-трансформаторных преобразователей и катушка корректора нуля соединены последовательно и питаются переменным током напряжением 33 В, частотой 50 Гц от специальной обмотки силового трансформатора усилителя. Вторичные обмотки преобразователей соединены по компенсационной схеме. [c.307]
При рассмотрении действия измерительной схемы будем полагать, что сердечник в катушке корректора нуля находится в среднем положении. [c.307]
Дифференциально-трансформаторный преобразователь является параметрическим преобразователем, в котором перемещение сердечника преобразовывается в параметр — взаимную индуктивность между первичной и вторичной обмотками. Неравенство взаимных индуктивностей и Л1в обусловливает возникновение в измерительной схеме (рис. 8-4-3) сигнала небаланса. [c.308]
В схеме вторичного прибора предусмотрено дополнительное устройство КО, позволяющее в случае необходимости производить корректировку нуля измерительного комплекта.
Для проверки исправности вторичного прибора предусмотрена перемычка с кнопкой КИ ( контроль ). При нажатии кнопки закорачиваются выходная цепь передающего преобразователя ДТП и вторичная обмотка катушки КО. Если прибор исправен, то стрелка его должна установиться против контрольной отметки на циферблате. [c.308]
Дифференциально-трансформаторные преобразователи с характеристикой, приведенной на рис. 8-4-2, используются в показывающих вторичных автоматических приборах типа ДП с вращающимся цилиндрическим циферблатом типа ЭИВ, в показывающих и самопишущих миниатюрных типа ДСМ, малогабаритных типа ДС в показывающих и самопишущих типа ЭПИД.
 [c.308]
[c.308]
Если вторичный прибор из числа указанных типов в комплекте с дифманометром предназначен для измеренйя расхода жидкости, газа или пара по перепаду давления в сужающем устройстве, то он снабжается квадратичным кулачком, так как между расходом и перепадом давления существует квадратичная зависимость (гл. 14). Во всех других случаях вторичные приборы имеют линейный кулачок. [c.308]
Рассмотренные дифференциально-трансформаторные преобразователи невзаимозаменяемы и измерительные комплекты, состоящие из первичных приборов с такими преобразователями и указанных выше вторичных приборов, требуют индивидуальной градуировки. [c.308]
В катушке преобразователя сердечник внутри защитной оболочки показан пунктиром. Сердечник из среднего нейтрального положения может перемещаться вверх или вниз на нормированное расстояние. [c.309]
 Допускаемые отклонения рабочего хода сердечника для этих преобразователей не превышают 25% номинального значения.
[c.309]
Допускаемые отклонения рабочего хода сердечника для этих преобразователей не превышают 25% номинального значения.
[c.309]
Дифференциально-трансформаторные гфеобразователи модификации ДТП-4 с номинальным рабочим ходом сердечника 4 мм, устанавливаемые во вторичных приборах, устроены аналогично с передающими и снабжены дополнительной третьей обмоткой ДО с подключенным к ней регулируемым резистором Яз для корректировки нуля измерительного комплекта по шкале вторичного прибора. Дополнительная обмотка ДО из двух секций размещается возле средней Щеки каркаса катушки (на рис. 8-4-4, а обмотка ДО показана Пунктиром). Секции этой обмотки наматываются проводом ПЭВ-2-0,2 поверх вторичной обмотки. [c.309]
При градуировке (поверке) первичного и вторичного приборов верхний предел выходного напряжения, а следовательно, и взаимной индуктивности преобразователей ДТП можно изменять (передающего на 25%, компенсационного на 15%.) с помощью регулируемых резисторов и делителей.
 [c.310]
[c.310]
Зависимость между значением взаимной индуктивности М и относительным перемещением сердечника взаимозаменяемого дифференциально-трансформаторного преобразователя приведена на рис. 8-4-6. Нелинейность зависимости М — f (х/хн) преобразователя ДТП не превышает 0,5% номинального значения взаимной индуктивности. [c.310]
Предел допускаемой основной погрешности преобразователя не должен превышать 1% номинального значения взаимной индуктивности. Относительное значение остаточной взаимной индуктивности преобразователя ДТП не должно превышать 1 % нормированного значения взаимной индуктивности. [c.311]
Принцип действия измерительной схемы ничем не отличается от рассмотренного выше. [c.312]
Линия связи между первичным и вторичным приборами, имеюш,ая сопротивление каждой жилы не более 5 Ом и емкость между каждой парой жил не более 0,02 мкФ, не вносит дополнительной погрешности.
 Для рекомендуемых заводом-изготовителем приборов к применению типов кабелей это соответствует длине линии примерно 250 м. Увеличение длины линии связи вызывает изменение выходного сигнала не более 0,1% на каждые последуюш,ие 100 м. Корректировку нуля производят с помощью движка регулируемого резистора / з. Для поверки исправности вторичного прибора кнопкой КИ закорачивают выходную цепь преобразователя первичного прибора и цепь корректора нуля. Если прибор исправен, то стрелка его должна установиться на начальную отметку шкалы.
[c.312]
Для рекомендуемых заводом-изготовителем приборов к применению типов кабелей это соответствует длине линии примерно 250 м. Увеличение длины линии связи вызывает изменение выходного сигнала не более 0,1% на каждые последуюш,ие 100 м. Корректировку нуля производят с помощью движка регулируемого резистора / з. Для поверки исправности вторичного прибора кнопкой КИ закорачивают выходную цепь преобразователя первичного прибора и цепь корректора нуля. Если прибор исправен, то стрелка его должна установиться на начальную отметку шкалы.
[c.312]
Кроме рассмотренных выше взаимозаменяемых дифференциальнотрансформаторных преобразователей изготовляются также унифицированные передающие преобразователи других типов. [c.312]
Вернуться к основной статье
Преобразователь дифференциально-трансформаторный — Энциклопедия по машиностроению XXL
| Рис. 8.5. Схема манометра с дифференциально-трансформаторным преобразователем |
В глубинных датчиках применены дифференциально-трансформаторные магнитоупругие преобразователи.
 Глубинные датчики практически нечувствительны к крутящему и изгибающему моментам, а также к всестороннему гидростатическому давлению. Эти датчики предназначены для непрерывного контроля осевой нагрузки бурильного инструмента.
[c.386]
Глубинные датчики практически нечувствительны к крутящему и изгибающему моментам, а также к всестороннему гидростатическому давлению. Эти датчики предназначены для непрерывного контроля осевой нагрузки бурильного инструмента.
[c.386]Схема мембранного дифманометра типа ДМ с дифференциально-трансформаторным преобразователем приведена на рис. 5.5. Схема наглядно иллюстрирует общие особенности конструкции дифманометров, измеряющих разность давлений в диапазоне от О до 1 МПа при рабочем давлении [c.347]
I — корпус 2 — разделительная стенка 3 — мембранный блок 4 — плунжер (сердечник) 5 — катушка дифференциально-трансформаторного преобразователя 6 — трубка из немагнитного материала 7,8 — вентили запорные и уравнительный [c.348]
В тахометрических расходомерах частота вращения турбинки преобразуется в пропорциональный электрический сигнал с помощью индукционных, индуктивных и дифференциально-трансформаторных преобразователей, в которых из-за отсутствия зубчатой передачи снижается противодействующий момент и повышается точность измерения. Существуют конструкции безопорных турбинок с полной гидродинамической разгрузкой подшипников. Однако из-за большого влияния вязкости их метрологические характеристики несколько хуже, чем у турбинок с нагруженными подшипниками.
[c.360]
Существуют конструкции безопорных турбинок с полной гидродинамической разгрузкой подшипников. Однако из-за большого влияния вязкости их метрологические характеристики несколько хуже, чем у турбинок с нагруженными подшипниками.
[c.360]
Дифференциально-трансформаторный преобразователь. Такой преобразователь состоит из дифференциального трансформатора (катушки), плунжера, одной первичной и двух вторичных обмоток. Если плунжер расположен симметрично относительно вторичных обмоток, то наводимые в них ЭДС равны, но противоположны по знаку. В этом случае выходной сигнал преобразователя равен нулю. При перемещении плунжера вверх или вниз от среднего положения соответственно изменяется величина и знак выходного сигнала. [c.430]
В настоящее вре.мя выпускают автоматические электронные приборы серии К (КП — показывающие, КВ — показывающие с вращающейся шкалой и КС — самопишущие), имеющие следующие обозначения КПП, КВП, КСП — потенциометры КПМ, КВМ, КСМ — уравновешенные мосты КСД — приборы с дифференциально-трансформаторным преобразователем КСФ — приборы с ферро-динамическим преобразователем КПУ, КВУ, КСУ — приборы унифицированного электрического сигнала. [c.431]
[c.431]
Из бесконтактных преобразователей для электромеханических датчиков наиболее удобны дифференциально-трансформаторные, самые простые из которых имеют линейную характеристику в пределах (1,5…2,5) мм от нейтрального положения. [c.110]
Нормирующие преобразователи НП-С, НП-Т, НП-П предназначены для преобразования сигнала соответственно от термометра сопротивления, термопары и дифференциально-трансформаторных датчиков. [c.190]
Трубчатыми пружинными манометрами являются приборы типа ЭКМ и МЭД. Манометры типа ЭКМ — электроконтактные, их применяют для регулирования и сигнализации при отклонении давления от предельных значений. Класс точности прибора 1,5. Манометры типа МЭД с дифференциально-трансформаторным преобразователем предназначены для генерирования [c.33]
Сельсин 404 или 405 потенциометр дискретный цифровой, вибрационный, дифференциально-трансформаторный ферродинамический (по заказу) преобразователь
[c. 462]
462]
Часто унифицирующие преобразователи совмещаются с усилителями. На рис. 31 показана упрощенная схема преобразователя напряжений переменного тока, получаемых от трансформаторных или реостатных измерительных преобразователей. На выходе схемы снимается унифицированный сигнал в виде постоянного тока с номинальным значением = 5 мА при = 2-4-2,5 кОм. На рисунке входной сигнал поступает от дифференциально-трансформаторного измерительного преобразователя, первичная обмотка которого питается [c.137]
Один—три дифференциально-трансформаторных преобразователя [c.159]
Турбинные тахометрические расходомеры выпускаются в двух модификациях с аксиальными турбинками с ферромагнитными винтовыми лопастями и тангенциальными турбинками различных конструкций. Первый из них применяют для измерения объемных количеств нефтепродуктов с кинематической вязкостью (25Ч-4)-10 м / , не содержащих механических примесей. Тахометрический преобразователь расхода через дифференциально-трансформаторный и приемно-нормирующий преобразователь (Пн5) выдает на вторичный унифицированный выходной сигнал постоянного тока О—5 мА, В качестве вторичных преобразователей для работы в комплекте с турбинными тахометрическими расходомерами используют автоматические электронные миллиамперметры КСУ-4
[c. 248]
248]
Дифференциальные манометры с упругими -мембранами типа ДМ являются бесшкальны-ми приборами, снабженными индукционным датчиком (дифференциально-трансформаторным преобразователем) и выпускаются промышленностью трех моделей с классом точности 1,0 и 1,6 на предельные перепады давлений 100—250 или 0,4—6,3 кгс/см . Изменение этих пределов достигается установкой сменных мембранных коробок различной жесткости. Для измерения малых перепадов давлений (до 100 кгс/м ) применяются сдвоенные коробки небольшой жесткости. Приборы типа ДМ рассчитаны на рабочее давление среды 63, 250 и 400 кгс/см и защищены от повреждения при одностороннем действии давления складыванием по профилю верхней и нижней мембранных коробок. Измерительный блок прибора обладает температурной компенсацией, так как нижняя мембранная коробка имеет значительно меньшую жесткость, чем верхняя. Работают эти приборы в комплекте с одним из вторичных показывающих и самопишущих электронных приборов дифференциально-трансформаторной системы
[c. 163]
163]
Ниже дано описание некоторых электрических измерительных преобразователей типа дифференциально-трансформаторного с магнитной компенсацией, электросиловой компенсацией, а также пнев-мосилового преобразователя, которые щироко используются в уни-фицЕЕрованной системе пневматических и электрических датчиков теплоэнергетических параметров. [c.158]
Регулирующий прибор состоит из измерительного и электронного блоков, объединенных в одном корпусе. Исполнительный механизм, выполняемый в виде колонки дистанционного управления и электропривода с редуктором, размещается отдельно от регулирующего прибора и может управляться с помощью специального дистанционного управления. Регулирующая аппаратура предназначена для реализации автоматических систем регулирования (АСР) различных технологических процессов. Она обеспечивает суммирование и компенсацию электрических сигналов, поступающих от первичных приборов (преобразователей сигналов), и усиление этих сигналов до значения, необходимого для управления пусковым устройством электрического исполнительного механизма.![]() При этом регулирующие приборы в сочетании с исполнительным механизмом с постоянной скоростью позволяют осуществить П — и ПИ-законы регулирования. Более сложный ПИД-закон регулирования формируется лишь при подаче на вход электронного блока дополнительного сигнала по скорости изменения регулируемой величины. Регулирующие приборы РПИБ модифицируются по типу установленных в них измерительных блоков. Например, в РПИБ-И1 установлен измерительный блок типа И-П1 для суммирования и компенсации электрических сишалов, поступающих от трех индукционных или дифференциально-трансформаторных датчиков переменного тока, в РПИБ-IV — от четырех. Приборы РПИБ-П1 и РПИБ-IV применяются, как правило, в АСР давления, уровня, расхода или соотношения расходов жидкостей, пара или газа, т. е. в тех случаях, когда используются датчики переменного тока.
[c.197]
При этом регулирующие приборы в сочетании с исполнительным механизмом с постоянной скоростью позволяют осуществить П — и ПИ-законы регулирования. Более сложный ПИД-закон регулирования формируется лишь при подаче на вход электронного блока дополнительного сигнала по скорости изменения регулируемой величины. Регулирующие приборы РПИБ модифицируются по типу установленных в них измерительных блоков. Например, в РПИБ-И1 установлен измерительный блок типа И-П1 для суммирования и компенсации электрических сишалов, поступающих от трех индукционных или дифференциально-трансформаторных датчиков переменного тока, в РПИБ-IV — от четырех. Приборы РПИБ-П1 и РПИБ-IV применяются, как правило, в АСР давления, уровня, расхода или соотношения расходов жидкостей, пара или газа, т. е. в тех случаях, когда используются датчики переменного тока.
[c.197]
Устройство обратной связи конструктивно выполняется в одном блоке с электрогидравлическим преобразователем. В блоке управления и обратной связи используются два изо-дромных дифференциально-трансформаторных датчика, плунжеры которых при помощи рычажной системы кинематически связаны с валом сервомотора.
 Кроме этого, имеется один датчик жесткой обратной связи, соединенный также с выходным валом сервомотора.
[c.123]
Кроме этого, имеется один датчик жесткой обратной связи, соединенный также с выходным валом сервомотора.
[c.123]Для измерения больших перемещений сконструированы преобразователи с винтовым якорем (в качестве якоря используют ферромагнитный винт, а сердечник выполнен в виде двух гаек с обмотками) дифференциально трансформаторные преобразователи (якорь выполнен в виде рейки с треугольным зубцом, а относительно рейки перемещается система сердечников с обмотками) индуктосины, принцип действия которых основан на изменении взаимной индукции между обмотками головки и линейки при их взаимном перемещении. Преобразователи в основном применяются в станках с программным управлением. [c.311]
При необходимости поддерживать большую степень точности дозирования или допускать больший диапазон колебаний Q в систему управления следует включить нормирующий преобразователь (освоение преобразователя начато в 1965 г. на заводе Энергоприбор) для дифманометров с дифференциально-трансформаторными датчиками (завода Манометр ), который спрямляет характеристику дифманометра-расходомера с точностью 1,5% в пределах 20—100% измеряемого расхода и 3—5% в пределах 0—20%. Таким образом, можно получить высокую точность подачи при изменении расхода обрабатываемой воды от величины, близкой к нулю, до 100%.
[c.162]
Таким образом, можно получить высокую точность подачи при изменении расхода обрабатываемой воды от величины, близкой к нулю, до 100%.
[c.162]
X К Р- Датчиком температуры пара является термометр сопротивления Rt. В качестве датчика давления используется ферродинамический индикатор давления ИДФ, рамка преобразователя которого 9 выдает напряжение, пропорциональное давлению. Давление будет вводиться с большей точностью при использовании манометра с дифференциально-трансформаторным датчиком типа МЭД (рис. 3-5,6). Подключение манометра МЭД в схему рис. 3-5,а показано одноименными зажимами а, б, в, г. Для возможности включения первичной обмотки датчика МЭД последовательно с обмоткой возбуждения компенсирующего преобразователя ПФ4 вторичного прибора тепломера обмотка датчика МЭД шунтируется сопротивлением 7 = 180 ом. Для введения постоянного числа ki [см. (3-2)] плунл[c.80]
УТ-П-ТС Предназначен для суммирования сигналов переменного тока от термометров сопротивления и дифференциально — трансформаторного датчика, управляет двигателем типа РД-09 элек-тропневматического преобразователя
[c.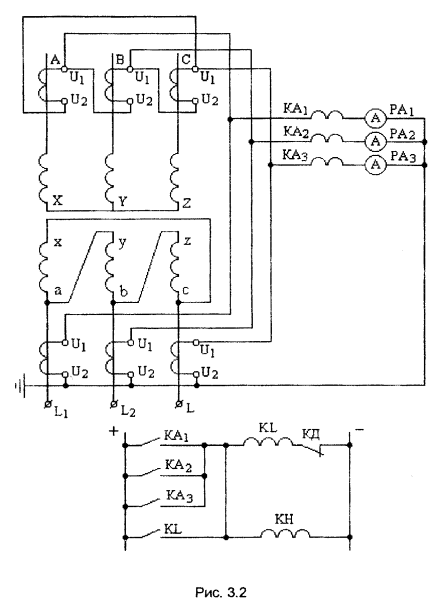 784]
784]
Приборы дифференциально-трансформаторной системы применяются мало. В принципе здесь выходным сигналом первичных преобразователей служит напряжение переменного тока, которое компенсируется напряжением такой же амплитуды и фазы, вырабатываемым преобразователем вторичного прибора. Ограничение в применении связано с тем, что сигналы связи переменного тока подвержены сильному влиянию помех. В серии КС приборы дифференциально-трансформаторной системы имеют обозначение КСД, к ним относятся некоторые модификации приборов РП160. [c.343]
Вторичными показывающими и регистрирующими приборами, измеряющими сигналы первичных приборов с дифференциально-трансформаторными преобразователями, являются автокомпенсаторы типа кед. Для измерения сигнала переменного тока первичных преобразователей используется компенсационный метод измерения. Источником сигнала компенсации служит дифференциальнотрансформаторный преобразователь, находящийся во вторичном приборе. Технические данные выпускаемых в настоящее время приборов этой системы типа ДИ, ДИВ, ТНМ, ДВ, ДД, ДМ, ДМТ приведены в табл. 5.23. Преобразователи дифманометриче-ские ДМП при работе с блоком преобразования могут иметь на выходе токовый сигнал О—5 4— 20 мА, пропорциональный как измеряемой разности давлений, так и корню квадратному из нее.
[c.348]
5.23. Преобразователи дифманометриче-ские ДМП при работе с блоком преобразования могут иметь на выходе токовый сигнал О—5 4— 20 мА, пропорциональный как измеряемой разности давлений, так и корню квадратному из нее.
[c.348]
Дифференциально-трансформаторные преобразователи (табл. 5.23) применяются в качестве нуль-индикатора положения измерительного рычага в преобразователях давления с силовой компенсацией типа ИПД, ИПДЦ. Эти преобразователи используются в диапазоне давлений от 6 кПа до 16 МПа в качестве эталонных приборов при лабораторной поверке приборов давления. Предел их основной приведенной погрешности в зависимости от диапазона измерения составляет 0,1—0,05 %. В этих преобразователях сильфоны применяются только для преобразования давления в силу. Развиваемый этой силой на измерительном рычаге момент компенсируется моментом, создаваемым магнитоэлектрическим механизмом обратной свя- [c.348]
За рубежом широко распространены датчики с дифференциаль-но-трансформаторной системой. Пресс-плунжер связан с сердечником, помещенным внутри обмоток дифференциально-трансформаторной катушки. Первичный преобразователь и измерительный прибор соединены между собой кабелем. При этом обмотки возбуждения соединены последовательно и питаются от сети переменного тока. Вторичные обмотки катушек включены навстречу друг другу через электронный усилитель. Датчик работает по индуктивному принципу возникающий сигнал пропорционален скорости перемещения сердечника. На рис. 5.2, в приведена схема широко применяемого за рубежом датчика скорости, в котором использован этот принцип. Величина формируемого сигнала пропорциональна скорости перемещения подвижного элемента магнита 10. Ввиду того, что ход датчика с дифференциальнотрансформаторной системой меньше хода пресс-плунжера, было разработано шарнирно-рычажное устройство, которое в 2 раза [c.162]
Чувствительными элементами датчиков обычно служат мембраны, манометрические трубки, мембранные коробки, сильфоны и поплавки, которые преобразуют измеряемый параметр (давление, расход, уровень) в движущую силу или момент. Чувствительный элемент связан с дифференциально-трансформаторным или ферродииамическим преобразователем (в технической литературе указанные [c.424]
Датчики с электрическим выходным сигналом переменного тока (табл. 5) и с дифференциально-трансформаторными преобразователями используются в комплекте со вторичными автоматическими электронными приборами с дифференциально-трансформаторной измерительной схемой (ЭПИД, ДС1, КСД и др.). Датчики с ферродинамическими преобразователями работают в комплекте со вторичными автоматическими приборами (ВСФ, КСФ2 и др.) с ферродинамической измерительной схемой. [c.429]
Отечественной промышленностью выпускается несколько типов дифференциально-трансформаторных преобразователей (ПЭС, ДПЭС-Т, ЭПВИ-14 и др.). Для получения унифицированного сигнала эти преобразователи подключают к специальным вторичным (кормируюш им) преобразователям типа НП-П1М или НП-ПЛ1. [c.430]
Для контроля глубины поверхностного обезуглероживания подшипниковой стали при ручном или автоматическом сканировании поверхности прутка или детали подшипника с помощью накладного преобразователя применяют установку Феррит-2 . На этой установке можно контролировать глубину цементированного, закаленного и азотированного слоев ферромагнитных материалов. Для снижения погрешности, вызванной влиянием мешающих факторов, в приборе применено возбуждение ВТП одновременно токами трех частот, регулируе-МЫШ1 по амплитуде в диапазоне 0—40, 10—100 и 15—150 мА. Напряжения трех частот, получаемые от автогенератора через делители частоты, регулируются независимо от фазы в диапазоне от О до 360° и подаются на сумматор. Полученное напряжение сложной формы усиливается и поступает на дифференциальный трансформаторный накладной ВТП, выполненный на ферритовых сердечниках в виде колец с щелевым зазором 2 мм. Усиленный сигнал встречно-включенных измерительных обмоток поступает в стробируемый усилитель мгновенных значений напряжения. Подбором амплитуд и фаз напряжений, поступающих в сумматор, добиваются (используя контрольные образцы) минимального влияния мешающих факторов (зазора и степени обезуглероживания) на выходной сигнал усилителя мгновенных значений. Для настройки (довольно сложной) применяют отдельный блок, отключаемый по ее окончашш. [c.156]
Дифференциальные трансформаторные преобразователи обладают высокой чувствительностью. В отлпчне от недифференциальных преобразователей сила тока в первичной обмотке датчика практически остается неизменной при изменении 5о, так как суммарный воздушный зазор, а следовательно, и магнитное сопротивление при перемещении якоря, не изменяется. [c.175]
В качестве вторичных приборов в промышленности применяются пирометрические милливольтметры, логометры, автоматические мосты, потенциометры, приборы с дифференциально-трансформаторной измерительной схемой, с токовым входным унифицированным сигналом, а также пневматические измерительные приборы различных модификаций. Вторичные приборы обеспечивают дистанционный контроль различных технологических параметров, при наличии выходных преобразователей — преобразование вькодного сигнала из одного вида в другой, сигнализацию предельных значений отклонений параметра от номинального значения, а в отдельных случаях позиционное, пропорциональное и пропорционально-интегральное регулирование. [c.79]
Р25.1 — сигнал перемеиного тока частотой 50 Гц от О до 0,5 В (подключение от 1 до 3 дифференциально-трансформаторных измерительных преобразователей) [c.118]
РС29.1.42 РС29.1.43 Сигналы от дифференциально-трансформаторных преобразователей те же, что в исполнении РС29.1.11(12) Унифицированные сигналы постоянного тока 0—5 мА, 0—20 мА 0—1 В, 0—10 В Сигнал от реостатного датчика указателя положения исполнительного механизма [c.128]
Одномерные объекты
Классификация объектов управления.
Основы моделирования управляющих технических систем
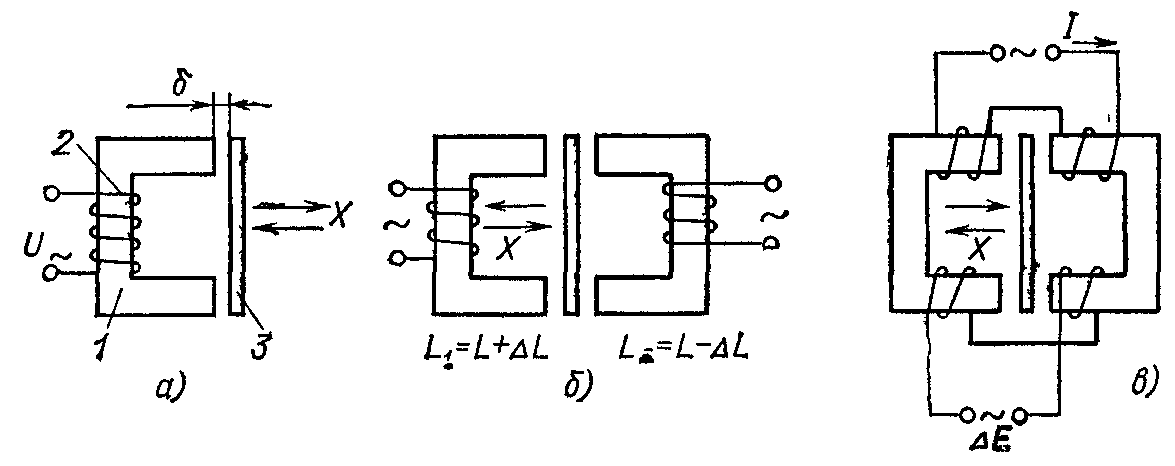
Дифференциально-трансформаторная схема.
Мостовая схема
Компенсирующая или уравновешивающая схема.
ИЗМЕРИТЕЛЬНЫЕ СХЕМЫ.
Рисунок 68
Принцип действия основан на уравновешивании или компенсации ЭДС П.И.П. напряжением внешнего источника тока
Схема будет работоспособной, если токи I1 и I2 будут протекать по участку АС в одном направлении.
В мостовых измерительных схемах параметрический П.И.П. включается в плечо(плечи) мостовый схемы, а генераторные П.И.П. ы дифференциально включаются в измерительную диагональ.
Рисунок 69
Использование мостовых схем позволяет получить выходные величины разных знаков для управления работой автоматических устройств.
Принцип действия основан на реализации метода контурных токов, согласно которому, ток в смежной ветви равен разности двух контурных токов.
Рисунок 70
Измеряемые механические усилия Р через передаточный механизм перемещает контакт С по потенциометру, при этом в смежной ветви контролируется разность двух контурных токов.
Во вторичных приборах дифференциально-трансформаторной системы первичные обмотки измерительных систем соединяются последовательно, а вторичные – встречно. Вследствие этого в трансформаторной системе вторичного прибора возникает разность ЭДС, которая компенсируется в момент уравновешивания.
Объектом химической технологии называется система аппаратов и машин, в которых химико-технологические величины поддерживаются автоматическими регуляторами на заданном значении или изменяются по определенному закону.
Входные величины объектов – это потоки жидкостей, газов, сыпучих веществ, тепловые потоки.
Возмущающие воздействия – это изменения параметров исходного сырья и энергетических объектов, состояние энергетической аппаратуры.
Выходные величины объектов – это величины, которые характеризуют протекание ХТ процесса (T,P,F,L …)
Нагрузка объекта – это колическтвово вещества или тепла, которое проходит через объект за единицу времени.
Математическая модель – это совокупность математических уравнений, отражающих взаимосвязь между входными и выходными величинами.
Математическая модель должна отражать особенности объекта с точки зрения его управления, должна быть адекватной моделируемому объекту (т.е. отражать его свойства количественно и качественно).
В соответствии с физ. сущностью процессов, протекающих в объекте, математические модели делят на:
-детерминированные; -стохастические.
В детерминированных моделях значения выходных величин однозначно определяются значениями входных величин. Для их решения применяются методы классического анализа и численные методы.
В стохастических моделях отсутствует четкое соответствие между значениями входных и выходных величин. Для их решения применяются методы теории вероятности и математической статистики.
Эти объекты имеют одну выходную величину и характеризуются одним уравнением статики и одним уравнением динамики.
Fпр, Fр – входные величины
L – выходная величина
L=f(Fпр,Fр) – Ур-е статики
L=f(Fпр,Fр,t) – Ур-е динамики
Для одномерного объекта схема динамического канала имеет вид:
Рисунок 71
По данной схеме видно, что выходная величина определяется параметрами 2-х входных величин.
Конспект урока по теме «Средства измерения»
Системы дистанционной передачи показаний (информации, СДПП) предназначены для восприятия величины технологического параметра и преобразования его в другую физическую величину с помощью первичного преобразователя (ПП), передачи на расстояние с помощью линии связи (ЛС) и восприятия в виде визуальной информации на измерительном приборе (ИП).
В зависимости от используемой энергии СДПП подразделяются на электрические (омические, дифференциально-трансформаторные, ферродинамические, сельсинные) и пневматические.
Омические СДПП. (рис. 2.5) предназначены для контроля на расстоянии технологических параметров, преобразованных в изменение электрического сопротивления.
Рис. 2.5. Омическая система преобразования и передачи данных
СДПП состоит из первичного преобразователя ПП, 3-проводной линии связи ЛС и измерительного прибора ИП. ПП представляет собой реохорд Rпп движок, которого механически связан с датчиком технологического параметра (ДТП). ИП имеет также реохорд Rип который электрически вместе с Rпп образует уравновешенную мостовую схему с плечами АС, СB, BD и DA. Уравнение равновесия мостовой схемы:
r1r4 = r2r3,
где r1 …, r4 ― текущие значения сопротивлений Rпп и Rип.
Диагональ питания CD и измерительная диагональ АВ подключены на вход электронного усилителя ЭУ.
Выход ЭУ соединен с реверсивным двигателем РД, вал которого механически связан с движком Rип и показывающей стрелкой отсчетного устройства. При изменении значения контролируемого параметра смещается движок Rпп, что приводит к изменению сопротивлений r1, и r2. При этом нарушается уравнение равновесия схемы. В измерительной диагонали появляется электрический сигнал, который через ЭУ поступает на РД. Его вал начинает вращаться, перемещая показывающую стрелку и изменяя положение движка Rип. При этом будут изменяться сопротивления r3 и r4. Двигатель будет работать до тех пор, пока равновесие не восстановится, а после окончания его работы стрелка покажет новое значение технологического параметра. Загрязнение поверхности обмотки Rпп и истирание ее движком приводит к изменению сопротивления Rип что нарушает точность измерений. Кроме того, при работе может произойти отрыв движка от обмотки преобразователя. В связи с этим область применения омических СДПП достаточно ограничена.
Дифференциально-трансформаторная СДПП. Предназначена для измерения технологических параметров, преобразованных в линейное перемещение.
Рис. 2.6. Дифференциально-трансформаторная система преобразования и передачи данных
Измерительная схема дифференциально-трансформаторной СДПП (рис. 2.6) состоит из первичного преобразователя ПП, 4-проводной линии связи ЛС и измерительного прибора ИП.
ПП состоит из сердечника 1, который штоком 7 соединен с датчиком технологического параметра. При его изменении сердечник перемещается в вертикальном направлении на величину ∆L Сердечник находится между питающей индукционной обмоткой L1, и вторичной, измерительной L2. Вторичная обмотка состоит из двух секций, включенных в противофазе. В секциях индуцируются ЭДС е1, и е2. Суммарное напряжение
∆U1 = е1, — е2.
ИП имеет сердечник 2, который штоком 3 через толкатель 5 опирается на профильный кулачок 6. Ось кулачка связана с валом реверсивного двигателя РД. Вал РД соединен также с показывающей стрелкой 4. Сердечник находится между питающей L3 и измерительной L4 обмотками. Сердечник и обмотки идентичны тем же элементам ПП. В секциях обмотки L4 индуцируются ЭДС е3 и е4. Суммарное напряжение
∆U2 = е3 — е4.
Общее напряжение, снимаемое с обмоток L2 и L4,
∆U=∆ U1-∆U2.
Если сердечники 1 и 2 находятся в одинаковых положениях между своими обмотками, то ЭДС, индуцируемые в секциях обмоток попарно равны, т. е.
е1, = е3, е2 = е4.
В этом случае суммарные напряжения, снимаемые с обмоток, также равны: ∆U1=∆U2, и сигнал, поступающий на ЭУ, ∆U = 0. Вал РД будет неподвижен.
При изменении величины технологического параметра происходит перемещение сердечника 7. При этом изменяются величины е1, и е2 и нарушается равенство: е1≠е3, е2≠е4. Выходные сигналы с обмоток также становятся не равны друг другу: ∆U1 ≠U2 и возникает разностный сигнал ∆U=∆U1 — ∆U2. Этот сигнал через ЭУ поступает на РД. Его вал начинает вращаться, перемещая показывающую стрелку 4 и вращая кулачок 6. При этом происходит перемещение сердечника 2. РД будет работать до тех пор, пока сердечник 2 не займет такое же положение, как сердечник 7. В этом случае равновесие схемы восстановится.
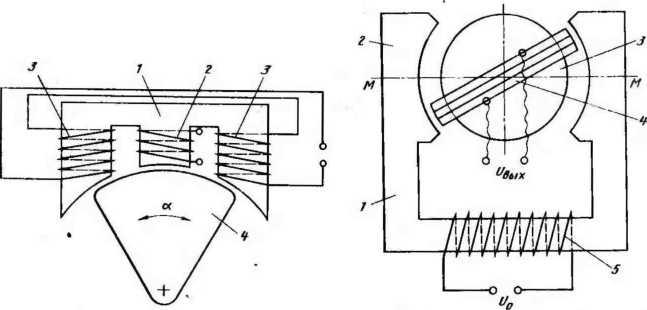
Ферродинамическая СДПП предназначена для измерения технологических параметров, преобразованных в угловое перемещение.
Рис. 2.7. Ферродинамическая система преобразования и передачи данных
Первичный преобразователь ПП соединен 4-проводной линией связи ЛС с измерительным прибором ИП.
ПП состоит из цилиндрического сердечника 6, помещенного внутри проволочной рамки 1, которая может поворачиваться вокруг оси и штоком 5 соединена с датчиком технологического параметра. Рядом с рамкой и сердечником находится питающая индукционная обмотка L1, от которой в рамке 1 наводится ЭДС е1, значение которой зависит от угла ее поворота φ1.
ИП имеет такой же сердечник 3, помещенный внутри проволочной рамки 2. Рамка механически связана с валом РД и поворачивается вокруг своей оси при вращении вала РД. Рядом с сердечником и рамкой находится обмотка питания L2, от которой в рамке наводится ЭДС е2, значение которой зависит от угла поворота φ2. Обе рамки 1 и 2 подключены на вход электронного усилителя ЭУ. Сигнал, подаваемый на вход ЭУ, ∆U = е1— е2. Если углы поворота рамок одинаковы (φ1 — φ2), то и ЭДС, индуцируемые в рамках, также одинаковы е1 = е2). Тогда сигнал, поступающий на ЭУ, равен нулю, т. е. ∆U = 0, и вал РД будет неподвижен.
При изменении величины технологического параметра шток 5 поворачивает рамку 1, изменяя угол φ1. Это вызывает изменение величины е1, и возникновение разностного сигнала ∆U = е1 — е2. Он поступает на ЭУ и далее на РД. Его вал начинает поворачиваться, перемещая стрелку 4 и поворачивая рамку 2 до тех пор, пока не восстановится равенство φ1 = φ2. В этом случае вновь е1 = е2, ∆U = 0 и работа двигателя прекратится.
Достоинством двух последних СДПП по сравнению с омической является отсутствие механических контактов в преобразователях ПП и ИП.
Пневматическая СДПП. Этот вид СДПП в качестве полезных сигналов использует давление сжатого воздуха в диапазоне рс = 0,02…0,1 МПа, а питанием служит сжатый воздух давлением рп = 0,14 МПа.
Рис. 2.8. Пневматическая система преобразования и передачи данных.
Наиболее широко в пневматических СДПП используются преобразователи силовой компенсации. Схема такой СДПП изображена на рис. 2.8. Контролируемый параметр преобразуется в первичном преобразователе в перемещение ∆I тяги 1. В результате на ней возникает усилие F, воздействующее на рычаг 2. Например, при увеличении технологического параметра тяга перемещается вправо, что приводит к повороту рычаг 2 вокруг опоры 3 по часовой стрелке. Закрепленная на конце рычага заслонка 4 приближается к соплу 5, уменьшая сброс воздуха через него в атмосферу из камеры 6. В камеру поступает воздух давлением питания через пневмосопротивление а. Оно снижает давление до максимально возможного для полезного сигнала ― 1 кг/см2. При уменьшении сброса воздуха увеличивается давление в камере 6, которое в качестве выходного давления рвых поступает по пневмоприводу 7 к измерительному прибору ИП. Одновременно в качестве сигнала обратной связи Pос давление поступает по пневмоприводу 9 в камеру 12. В ней установлен сильфон 10. Под действием усилия давления Рос он сжимается. Это усилие через шток 11 передается рычагу 2 стремясь повернуть его против часовой стрелки.
Когда усилие сильфона уравновесит усилие тяги 1, перемещение рычага 2 прекратится и на выходе из камеры 6 будет сформирован сигнал Рвых, пропорциональный величине контролируемого параметра.
15 Приборы для измерения мехвеличин
Б 2.7 Приборы для измерения мехвеличин
Сейчас мы с Вами рассмотрим еще один из типов приборов. Это приборы для измерения мехвеличины. Это приборы, а вернее датчики реле уровня жидкости (ДРУ1) в гидроамортизаторе, которые применяются непосредственно в реакторном отделении на системах УВ10, 20, 30, 40 (ПГ), УД10, 20, 30, 40 (ГЦН), УР20 — конденсатор объема, УР10 — конденсатор деаэратор. Всего их у вас в наличии 62 шт.
Принцип работы основан: при изменении положения технологического трубопровода, установки изменяет уровень жидкости в гидроамортизаторе. Далее с помощью дифманометрического датчика (ДУП) сигнал передается в схему сигнализации.
Рис. 26. Принципиальная схема электромагнитного газоанализатора.
Рекомендуемые файлы
Перейдем к следующему устройству, это устройство относительного расширения ротора (УК ОРР), предназначено для измерения и регистрации на диаграммной ленте величины расширения ротора, относительно корпуса турбины, сигнализации о достижении предельных значений расширения и выдачи нормированного сигнала 0-5 мА постоянного тока.
УК ОРР работает в комплекте с датчиком ОРР (рис. 27), который предназначен для преобразования осевого перемещения гребня ротора в изменение электрического сигнала. Датчик устанавливается в картере опорного подшипника, предназначен для работы при температуре до плюс 80оС и защищен от воздействия паров турбинного масла.
Вторичный прибор КСД1-049 (рис. 28), предназначен для отсчета по шкале, регистрации на диаграммной ленте, сигнализации предельных значений относительно расширения ротора, а также выдачи нормированного сигнала постоянного тока 0-5 мА. Шкала прибора отградуирована в зависимости от установки УК ООР (ЦВД — 5-0-5 + мм) и (ЦНД-3 -0-45 + мм) — рис. 26.
Устройство и работа прибора
Преобразование расширения ротора турбины относительно корпуса в электрический сигнал осуществляется дифференциально-трансформаторным датчиком ОРР (рис. 28), выходное напряжение которого изменяется пропорционально перемещению гребня ротора турбины.
Измерения выходного напряжения датчика ОРР осуществляется вторичным прибором КСД1 и основано на компенсационном принципе измерения.
Первичные обмотки датчика ОРР и дифференциально — трансформаторного датчика прибора соединяются последовательно и на них подается напряжение переменного тока 24 В от силового трансформаторного прибора.
Вторичные обмотки включаются встречно и в общую дифференциально — трансформаторную схему
Измерительная схема сфазирована таким образом, что при изменении напряжения на выходе датчика ОРР на входе усилителя прибора появляется напряжение небаланса
DЕ = Е1 — Е2, где (17)
Е1 — э.д.с. на выходе датчика ОРР;
Е2 — э.д.с. на выходе датчика прибора.
Усиленное полупроводниковым усилителем напряжение небаланса DЕ приводит во вращение реверсивный эл.двигатель, который с помощью профильного кулачка (лекала) будет перемещать сердечник датчика прибора до того момента, пока это напряжение не станет равным нулю.
Одновременно происходит перемещение указателя шкалы, показывающего значение измеряемой величины (рис. 29).
В датчике предусмотрена третья дополнительная обмотка для корректировки нулевого положения сердечника.
Рис. 27. Датчик ОРР.
Рис. 28. Схема электрическая принципиальная.
Рис. 29. Шкала устройства контроля ОРР.
Большое значение в работе УК ОРР имеет правильная установка датчика ОРР и включает в себя:
прокладку кабелей между датчиком и вторичной аппаратурой;
монтаж вторичной аппаратуры;
установку датчика ОРР на турбине.
Проводка от разъемов датчиков до клеммной коробки турбин выполняется неэкранированным маслостойким проводом в отдельной трубе.
Линии связи между клеммной коробкой турбины и прибором КСД1, установленном на блочном щите, должна быть выполнена пожильно экранированным проводом сечением не менее 0,75 мм2.
Схема внешних связей показана на рис. 30.
Установка датчика ОРР осуществляется в картере подшипника на специальном приспособлении (рис. 31), обеспечивающем перемещение датчика в осевом направлении при проверке работоспособности устройства контроля ОРР.
Приспособление состоит из неподвижного основания поз.1, которое крепится на турбине. Перемещение ползуна с датчиком осуществляется через коническую передачу винтом, который приводится во вращение вручную маховиком с лимбом поз.4. При повороте маховика на один оборот, ползун с датчиком перемещается на 1 мм.
Контроль перемещения датчика осуществляется механическим индикатором поз.6.
Для фиксации подвижной части приспособления имеется стопор поз.7. Сам датчик устанавливается на призонах поз.8.
При установке датчика на турбине необходимо выдержать зазор между средним керном датчика и гребнем турбины 1,2 ± 0,05 мм.
Температура в месте установки датчика в турбине не должна превышать плюс 80оС.
Во время эксплуатации устройства ОРР периодически, 1 раз в смену, проверить работоспособность прибора КСД1. Для чего необходимо нажать кнопку “Контроль”. При исправном приборе указатель шкалы должен установиться на отметке шкалы “К”.
Сейчас перейдем к следующему устройству контроля — это устройство контроля осевого сдвига ротора УК ОСР, оно служит для контроля осевого положения ротора турбин, предупредительной и аварийной сигнализации, а так же защиты турбины при недопустимом осевом сдвиге, который может произойти при износе или выплавлении баббита колодок упорного подшипника.
В настоящее время это устройство ОСР заменены на другие. Это устройство осевого смещения УИОС-1. Они различаются между собой ступенями защиты. УК ОСР две ступени защиты, что явно недостаточно было, что приводило к ложным срабатываниям защит. Новое устройство (УИСО-1) имеет три ступени защиты. Они в настоящее время установлены на всех 6-ти блоках ЗАЭС. Поэтому более подробнее остановимся именно на УИОС-1.
Рис. 30. Схема внешних подключений прибора КСД1-049.
Рис. 31. Приспособление для установки датчика ОРР на турбине.
УИОС-1 (далее устройство), является стационарным контрольно — сигнальным устройством. Предназначено для непрерывного, круглосуточного контроля относительного осевого перемещения роторов основного и вспомогательного оборудования электростанций и выдачи “предупредительного” и “аварийного” сигналов в систему сигнализации и защиты.
Устройство состоит из одноканальных комплектов технических средств, позволяющих комплектовать любое, заранее заданное, многоканальное построение.
Одноканальный комплект технических средств состоит из вихретокового преобразователя перемещений и блока измерений. Вихретоковый преобразователь неразъемный и состоит из чувствительного элемента и преобразователя параметрического типа, соединенных кабелем длинной не более 5м. Сам чувствительный элемент устанавливается (закрепляется) на объекте (турбине) непосредственно в местах измерения перемещений.
Измерительные блоки устанавливаются на блочном щите управления. Каждый блок соединяется с параметрическим преобразователем однопроводным экранированным кабелем типа МГШВЭ. Наиболее допустимое расстояние по длине кабеля от блока до преобразователя — 300 м.
Блок измерительный имеет:
— аналоговый унифицированный нормированный выход по постоянному току 0-5 мА на нагрузку 0-2 кОм для подключения внешнего регистрирующего устройства или выносного показывающего прибора;
— индикаторный нормированный выход мгновенных значений виброперемещений с амплитудой 0-5 В на RR нагр. не менее 10 кОм;
— четыре релейных выхода с нормально открытыми (разомкнутыми) контактами из них: два выхода на сигнализацию по предупредительному уровню смещения (на удаление и на приближение) и два выхода на сигнализацию по аварийному уровню смещения (один по удалению, другой по приближению).
Диапазон измерения осевого смещения составляет ±2,0 мм. Допустимая основная приведенная погрешность составляет не более 6%.
Диапазон измерения уставок уровней сигнализации от 10% до 80% диапазона измерения смещений. Время готовности устройства к работе после включения в сеть не менее 5 мин.
Во время эксплуатации устройство должно подвергаться осмотру на каждой смене. При этом проверяется:
— наличие питающего напряжения. Должна быть подсветка и показания стрелочного указателя;
— правильность установки зазора между датчиком и валоприводом при включенной кнопке “Зазор” на передней панели блока измерительного. При начальной установке датчика на объекте контроля стрелка прибора должна находиться на середине шкалы. При приближении объекта контроля к датчику, показания прибора пропорционально перемещению уменьшаются, а при удалении — увеличиваются.
Для индикации (проверки) исправности связи используются кнопки измерительного блока “ЗАЗОР” и “ПРОВ.”.
При исправной линии связи при нажатии кнопки “ПРОВ.” стрелка прибора устанавливается на середине шкалы (50%).
При обрыве стрелка прибора устанавливается вблизи середины шкалы, а при нажатии “ЗАЗОР” — отклоняется вправо от упора.
При коротком замыкании в линии связи загорается красный светодиод на шильдике устройства, при нажатии кнопки “ЗАЗОР” стрелка уходит вправо до упора, а при нажатии кнопки “ПРОВ.” — влево до нуля.
Сейчас перейдем к следующему устройству — это устройство контроля прогиба ротора. Это устройство предназначено для контроля тепловой деформации ротора турбины. Контроль прогиба осуществляется в режиме вращения ротора валоповоротным устройством.
В комплект устройства входит:
первичный преобразователь, которым является датчик прогиба ротора рис. 33. Он предназначен для преобразования зазора между датчиком и ротором в изменение электрического сигнала на выходе датчика;
вторичный прибор КСД1 служит для счета по шкале и регистрации на диаграммной ленте величин прогиба ротора.
Устройство контроля прогиба ротора представляет собой следующую систему, основанную на компенсационном принципе измерения с компенсацией небаланса в эл.цепи датчиков прогиба ротора, расположенных диаметрально противоположно возле ротора турбины. Датчики прогиба ротора работают на принципе индуктивного метода измерения линейных перемещений с применением дифференциально-трансформаторной схемы. Принцип работы схемы аналогичен УКОРР.
Шкала прогиба ротора переградуируется (рис. 32).
Рис. 32. Шкала прогиба ротора.
Цена одного малого деления шкалы соответствует 0,008 мм, одного большого деления — 0,04 мм.
Переходим к следующему устройству — это устройство контроля угловой скорости. (ДУС-1), т.е. датчик угловой скорости, который служит для преобразования частоты вращения ротора турбины в частоту синусоидального сигнала. ДУС-1 представляет собой бесконтактное электромагнитное устройство, состоящее из турбины (рис. 33, 34).двухполюсного статора и составной шестерни, диаметр которой зависит от типа
Рис. 33. Датчик прогиба ротора.
Рис. 34. Датчик угловой скорости ДУС-1.
Рис. 35. Схема датчика угловой скорости.
Двухполюсный статор датчика состоит из:
— 1 — магнитопровода П-образного;
— 2 -двух катушек, расположенных на полюсах магнитопровода 1;
— 4 — магнита постоянного;5 — экрана, выполненного из мягкой стали СТО;
— 2 — корпуса с крышками 6, в котором помещены все элементы датчика, на внешней стенке которого укреплен разъем 7.
Схематически датчик угловой скорости двухполюсного статора 1 составной шестерни 2.
Работа ДУС-1 заключается в следующем: при вращении ротора происходит перераспределение магнитного потока магнита 4 и магнитопровода 3, связанное с периодическим изменением магнитной проводимости рабочих воздушных зазоров, образованных полюсами. Вследствие этого в катушках 5 индуктируется э.д.с., частота которой пропорциональна угловой скорости вращения ротора. Действующее значение э.д.с. в правой и левой катушках 5 равны между собой, а фазы гармоники э.д.с. отличаются на половину периода основной гармоники.
При встречном включении правой и левой катушки э.д.с., наводимые в них, алгебраически суммируются.
При этом нечетные гармоники складываются, а четные вычитаются, что дает возможность получить менее искаженную форму выходного сигнала.
Рассмотрим кратко следующее устройство — это устройство контрольно — сигнальное ВВК-331. Оно предназначено для специальных цепей контроля параметров стационарных неимпульсных вибраций и формирование аналоговых и дискретных сигналов, зависимых от эффективного значения виброскорости подшипников турбины при ее пуске в стационарном режиме под нагрузкой.
В зависимости от необходимого количества точек измерения и способов установки вибропреобразователей пьезоэлектрических, число измерений каналов устройств может меняться от 4 до 20.
Устройство ИП-7 применяются для контроля осевого смещения ротора ТПН. ИП-7 предназначено для бесконтактного измерения осевого смещения (сдвига) вала ротора паровой турбины, преобразования величины смещения в унифицированный сигнал постоянного тока, сигнализации и формирования сигнала отключения оборудования при достижении заданного предельного значения смещения.
Устройство ИП-7 состоит из:
обмотки возбуждения вихретокового преобразователя;
блока вихретокового преобразователя;
блока контроля.
— элементов крепления обмотки возбуждения и блока.
Сейчас давайте разберем работу структурной схемы устройства ИП-7 (рис. 36).
Напряжение с выхода преобразователя поступает в блок контроля, где преобразуется в унифицированный сигнал постоянного тока, сравнивается с нуль — органами с заданными напряжениями (уровнями) сигнализации и защиты.
Рис. 36. Структурная схема устройства ИП-7.
При равенстве или превышении напряжений преобразователя уровней сигнализации нуль — органы 1, 2, 3, 4 включают исполнительные реле К1, К2, К3, К4, которые своими контактами замыкают цепи электрической сигнализации.
Нуль — орган 5 сравнивает напряжение преобразователя с уровнями соответствующими началу и концу рабочего диапазона измерения осевого сдвига ротора. Выход значения напряжения за пределы значений рабочего диапазона, сигнализируется как “отказ” устройства. Это происходит также при обрывах и коротких замыканиях в обмотке возбуждения, схеме соединений или при неисправностях электрорадиоэлементов.
Исправность нуль — органов защиты (3, 4) контролируется специальной схемой, назначение которой исключить ложные команды отключения оборудования при неисправности нуль — органа.
Контроллинг сущность, функции, виды — лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
Необходимо обратить внимание на то, что устройство ИП-7 выполняет функции защиты оборудования, оно должно работать непрерывно. При исправной работе ИП-7, сигнализируется светодиодом “КОНТР-И”. Если появилась неисправность в самом устройстве, светодиод выключается и замыкаются контакты реле цепи “ОТКАЗ”. Поэтому работа с выключенным светодиодом “КОНТ-И” категорически не допускается!
Для проверки работоспособности необходимо отключить защиту от осевого сдвига и действовать следующим образом:
— тумблер “РАБ-ПРОВ” перевести в положение “ПРОВ”;
— резистором “ПРОВ”, имитируя осевое смещение ротора, проверить срабатывание сигнализации, схемы контроля неисправности.
Обращаю Ваше внимание на то, что все работы, связанные с работой в цепях ТЗБ, блокировки, сигнализации на ЗАЭС, выполняются только по составленной программе выполнения работ согласно имеющейся инструкции “О порядке вывода оборудования в ремонт и ввода его в эксплуатацию после ремонта на ЗАЭС”. ОО.ПТ.ГГ.ИН.03.А.
Общие сведения Преобразователь П-ДТ предназначен для преобразования сигналов
дифференциально-трансформаторного датчика (ДТД) в сигнал постоянного
тока. Используется в системах автоматического регулирования различных
технологических процессов.
П-ДТ: Условия эксплуатации Температура окружающего воздуха от 5 до 50°С. Нормативно-технический документ ТУ 311.0225542.081-92 Технические характеристики Питание преобразователя осуществляется от однофазной сети
переменного тока напряжением 220—+ В частотой 50+1 Гц. Табл.   Диапазон изменения сигнала «корректора» не менее 100% номинального диапазона изменения выходного сигнала.   Диапазон изменения крутизны преобразования органом «чувствительность» не менее 1,5.   Масса преобразователя не более 0,5 кг. Общий вид, габаритные и установочные размеры преобразователя П-ДТ показаны на рис. 1. Рис. 1.   Общий вид, габаритные и установочные размеры преобразователя   П-ДТ:   1 — съемная крышка;   2 — штепсельный разъем;   3 — настроечные резисторы;   4 — трансформатор;   5 — модуль преобразования МП-01;   6 — кожух;   7 — крепежный фланец;   8 — винт;   9 — модуль питания и выхода МПВ-01;   10 — несущий кронштейн   Преобразователь состоит из несущего кронштейна, на котором крепится трансформатор, настроечные резисторы и штепсельный разъем для соединения с внешними устройствами. На скобах трансформатора крепятся модуль питания и выхода МПВ-01 и модуль преобразования МП-01. Все элементы преобразователя помещены в пластмассовый кожух, закрывающийся крепежным фланцем. Крепление преобразователя на вертикальную плоскость осуществляется через фланец двумя винтами М4×25.   На крепежном фланце находится съемная крышка, которая закрывает три клеммы, конструктивно расположенные на плате модуля МПВ-01.   Под аналогичной крышкой на задней стенке кожуха (со стороны разъема) выведены оси настроечных резисторов, с помощью которых осуществляется балансировка преобразователя при нулевом сигнале на входе и устанавливается крутизна преобразования входного сигнала в выходной.   Электрическая принципиальная схема преобразователя П-ДТ показана на рис. 2. Рис. 2.   Электрическая принципиальная схема преобразователя П-ДТ   Электрическая схема включает в себя: модуль преобразовательный МП-01, модуль питания и выхода МПВ-01, сетевой трансформатор.   Модуль МП-01 предназначен для формирования переменного тока питания, демодуляции и усиления сигнала дифференциально-трансформаторного датчика.   Модуль МПВ-01 предназначен для формирования постоянного напряжения питания и выходного токового сигнала.   Электрические соединения преобразователя с другими элементами системы автоматического регулирования и контроля выполняются в виде кабельных связей или жгутов вторичной коммутации. Рекомендуемое сечение провода не менее 0,35 мм2.   При размещении дифференциально-трансформаторного датчика и преобразователя в непосредственной близости относительно друг друга электрическое сопротивление проводников должно быть не более 0,05 Ом. В случае расположения датчика и преобразователя на расстоянии более 50 м электрическое сопротивление проводников должно быть не более 5 Ом, а емкость между каждой парой жил — не более 0,02 мкФ.   При наличии значительных импульсных помех входные цепи преобразователя могут быть выделены в отдельный кабель и экранированы.   Сопротивление изоляции между отдельными жилами и между каждой жилой и землей для внешних силовых, входных, выходных цепей должно составлять не менее 40 МОм при испытательном напряжении 500 В.   В целях повышения надежности системы автоматического регулирования рекомендуется перед включением преобразователя в постоянную эксплуатацию провести наработку в течение 96 ч, периодически контролируя работу преобразователя. В комплект поставки входят: преобразователь П-ДТ, паспорт, техническое описание и инструкция по эксплуатации. Центр комплектации «СпецТехноРесурс» |
Что такое LVDT? | линейно-регулируемый дифференциальный трансформатор
LVDT (линейный регулируемый дифференциальный трансформатор = представляет собой электромеханический датчик, используемый для преобразования механического движения или вибраций, в частности прямолинейного движения, в переменный электрический ток, напряжение или электрические сигналы и обратно. Приводные механизмы используются в основном для систем автоматического управления или в качестве механические датчики движения в измерительной технике Классификация электромеханических преобразователей включает принципы преобразования или типы выходных сигналов.
Короче говоря, линейный преобразователь обеспечивает величину выходного напряжения, связанную с измеряемыми параметрами, например, силой, для простой обработки сигнала. Устройства LVDT Sensor чувствительны к электромагнитным помехам. Снижение электрического сопротивления можно улучшить с помощью более коротких соединительных кабелей, чтобы исключить значительные ошибки. Для датчика линейных перемещений требуется от трех до четырех соединительных проводов для питания и подачи выходного сигнала.
Физически конструкция LVDT представляет собой полый металлический цилиндр, в котором вал меньшего диаметра свободно перемещается вперед и назад вдоль длинной оси цилиндра.Вал или толкатель заканчивается магнитопроводящим сердечником, который должен находиться внутри цилиндра или узла катушки, когда устройство работает.
В обычной практике толкатель физически прикреплен к подвижному объекту, положение которого должно быть определено (измеряемая величина), в то время как узел катушки прикреплен к фиксированной контрольной точке. Движение измеряемой величины перемещает сердечник внутри узла катушки; это движение измеряется электрически.
Принцип преобразования:- Электромагнитный
- Магнитоэлектрический
- электростатический
- Аналоговый и дискретный выход
- Цифровой
- Статические и динамические характеристики
- Чувствительность или передаточное отношение — E = Δy / Δx или Δy — это изменение выходной величины y, когда входная величина x изменяется на Δx
- Выходной сигнал — диапазон рабочих частот
- Статическая ошибка преобразования или сигнала
Виды ЛВДЦ
LD400: Миниатюрные преобразователи смещения постоянного тока с ацеталевыми подшипниками Датчики LVDT — определяют, нужно ли вам измерять относительный ток: C-in, AC-out, DC-in, DC-out; или измерение резонансных частот катушек в зависимости от положения катушек, устройства на основе частоты.Невыпадающая арматура: Эти механизмы лучше подходят для работы на больших расстояниях. Невыпадающие якоря помогают предотвратить перекос, поскольку они направляются и удерживаются узлами с низким коэффициентом трения.
Неуправляемые якоря: Бесконечное качество разрешения, механизм LVDT неуправляемого якоря представляет собой износостойкую конструкцию, которая не ограничивает разрешающую способность измеренных данных. Этот тип механизма прикрепляется к измеряемому образцу, свободно вставляется в трубку, поэтому корпус линейного преобразователя должен поддерживаться отдельно.
Якоря с принудительным выдвижением: Используйте внутренние пружинные механизмы, пневматическое усилие или электродвигатели, чтобы постоянно толкать якорь до максимально возможного полного выдвижения. Якоря с принудительным удлинением используются в LVDT для малоподвижных приложений. Эти механизмы не требуют соединения между образцом и якорем.
Линейные преобразователи переменного смещения обычно используются в современных обрабатывающих инструментах, авионике, робототехнике, а также в компьютеризованном управлении движением и автоматизации производства.Выбор применимого типа LVDT можно рассмотреть, используя следующие спецификации:
Линейность LVDT: Максимальное отклонение от прямой зависимости между измеренным расстоянием и выходным расстоянием в диапазоне измерения.
> 0,025 ±% полной шкалы
0,025 — 0,20 ±% полной шкалы
0,20 — 0,50 ±% полной шкалы
0,50 — 0,90 ±% полной шкалы
0,90 — ±% полной шкалы и более
Рабочие температуры: > — 32ºF, от -32 до 32ºF, от 32 до 175ºF, от 175 до 257ºF, 257ºF и выше.Диапазон температур, в котором устройство должно точно работать.
Диапазоны измерений: 0,02 дюйма, 0,02–0,32 дюйма, 0,32–4,0 дюйма, 4,0–20,0 дюйма, ± 20,0 дюйма (диапазон измерения или максимальное измеренное расстояние)
Точность LVDT: Описывает процент отклонения от фактическое / реальное значение данных измерений.
Выход: Напряжение, ток или частота
Интерфейс: Последовательный — стандартный протокол цифрового вывода (последовательный), такой как RS232, или параллельный — Стандартный протокол цифрового вывода (параллельный), такой как IEEE488 .
Тип LVDT: Токовый баланс AC / AC или DC / DC, или на основе частоты
LD320: датчики смещения LVDT переменного тока высокой точностиСмещение:
Преобразователь линейного смещения — это электрический преобразователь, используемый для измерения линейного положения. Линейное смещение — это движение объекта в одном направлении вдоль одной оси. Измерение смещения указывает направление движения. Выходной сигнал датчика линейного перемещения представляет собой измерение расстояния, пройденного объектом, в миллиметрах (мм) или дюймах (дюймах).Прецизионные преобразователи смещения LVDT устанавливаются на большинстве современных производственных линий для автоматического измерения при сортировке, применениях, требующих постоянного использования, и при проведении операций по контролю качества. Конструкция валов из закаленной стали, уплотнительных колец и титановых толкателей оптимизирует прецизионную работу в большинстве промышленных условий. Использование гибридных IC-модулей обеспечивает линейный выходной сигнал мВ / В / мм или мВ / В / дюйм для взаимодействия со стандартными измерителями входа постоянного тока, промышленными контроллерами, записывающими устройствами и интерфейсами передачи данных.Датчики
LVDT спроектированы и предназначены для использования во многих отраслях:
LD500: Прецизионные измерительные преобразователи постоянного тока LVDT для контроля качества или средств автоматизации- Общего назначения
- Аэрокосмическая промышленность
- Промывочная мембрана
- Heavy Duty / Industrial
- Опасная зона
- Монтаж на печатной плате
- Высокая точность
- Погружной
- Санитарно-техническое
- Специально для специальных целей
Эта дифференциальная конструкция дает LVDT значительное преимущество перед устройствами потенциометрического типа, поскольку разрешение не ограничивается расстоянием между обмотками катушки. В линейном преобразователе любое движение сердечника вызывает пропорциональное изменение выходного сигнала. Таким образом, LVDT имеет теоретически бесконечное разрешение: на практике разрешение ограничено только внешней выходной электроникой и физическими подвесками.
Поскольку это трансформатор, LVDT требует управляющего сигнала переменного тока. Специальный блок электроники или формирователь сигнала обычно используется для генерации этого управляющего сигнала, а также для преобразования аналогового выхода переменного тока устройства в + 5 В постоянного тока, 4–20 мА или в какой-либо другой формат, совместимый с оборудованием, расположенным ниже по потоку. Эта схема может быть внешней или может быть размещена внутри корпуса преобразователя. Внутренняя электроника позволяет пользователю подавать на преобразователь сигнал постоянного тока умеренного качества, что часто является преимуществом в приложениях с батарейным питанием и бортовых транспортных средствах.Однако внешняя электроника предлагает более высокое качество и может предоставлять дополнительные функции, такие как калибровка, чтобы обеспечить прямое считывание в технических единицах.
Как работает LVDT?
Принцип вращающегося переменного дифференциального трансформатора Преобразователь линейных перемещений — это, по сути, миниатюрный трансформатор, имеющий одну первичную обмотку, две симметрично намотанные вторичные катушки и сердечник якоря, который может свободно перемещаться вдоль своей линейной оси в направляющих точных подшипников.Шток толкателя соединяет контролируемый компонент с сердечником якоря, так что смещение этого компонента перемещает сердечник не по центру.Типичный датчик LVDT имеет три соленоидные катушки, выровненные встык, окружающие трубку. Первичная обмотка находится в центре, а вторичные обмотки — сверху и снизу. Объект измерения положения прикреплен к цилиндрическому ферроматическому сердечнику и скользит по оси трубки. Переменный ток приводит в действие первичную катушку, вызывая напряжение, индуцируемое в двух вторичных катушках, пропорциональное длине соединительного сердечника.Диапазон частот обычно составляет от 1 до 10 кГц.
Движение сердечника запускает связь от первичной к обеим вторичным обмоткам, что изменяет наведенные напряжения. Дифференциал верхнего и нижнего вторичного выходного напряжения — это отклонение от калиброванной нулевой фазы. Использование синхронного детектора считывает выходное напряжение со знаком, которое относится к смещению. Линейные преобразователи LVDT могут иметь длину до нескольких дюймов и работать как датчик абсолютного положения, который является повторяемым и воспроизводимым.Другие действия или движения не повлияют на точность измерения. LVDT также отличается высокой надежностью, поскольку скользящий сердечник не касается внутренней части трубки и позволяет датчику находиться в полностью герметичной среде.
LVDT — это устройство переменного тока, что означает, что электроника должна преобразовывать его выходной сигнал в полезный сигнал постоянного тока. В основе обработки сигналов LVDT лежат два гибридных модуля; Осциллятор и демодулятор.
Генератор разработан для обеспечения стабильной синусоидальной волны для возбуждения преобразователя и опорной прямоугольной волны для демодулятора.Демодулятор предназначен для усиления выходного сигнала преобразователя и преобразования его в высокоточное постоянное напряжение, которое прямо пропорционально смещению.
Для работы линейного преобразователя необходимо возбуждать первичный преобразователь синусоидальной волной, а выходной сигнал вторичных обмоток состоит из синусоидальной волны с информацией о положении, содержащейся в амплитуде и фазе. Выходной сигнал в центре хода равен нулю, возрастая до максимальной амплитуды на любом конце хода.Выход находится в фазе с первичным приводом на одном конце хода и не в фазе на другом конце.
В высококачественном датчике линейных перемещений соотношение между положением и фазой / амплитудой является линейным. Осциллятор и демодулятор — это то, что упрощает переход между положением и фазой / амплитудой.
Описание автогенератора
Функция осциллятора заключается в обеспечении точного синусоидального напряжения для управления преобразователем, стабильного как по амплитуде, так и по частоте.Он также обеспечивает опорную фазу прямоугольной формы для внутреннего использования и для установки нулей в демодуляторе. Осциллятор работает следующим образом. Синусоидальная волна для возбуждения преобразователя генерируется внутренним высокостабильным генератором моста Вина. Частота генератора устанавливается путем соединения контактов или добавления внешних резисторов. Затем синусоидальная волна проходит через усилитель мощности, чтобы обеспечить ток, достаточный для питания большинства преобразователей (50 мА), без необходимости использования внешних буферов.Усилитель мощности содержит схему защиты, поскольку в среде, где работает большинство преобразователей, вероятно короткое замыкание.Синусоидальная волна выводится на преобразователь и используется внутри для генерации прямоугольной волны для привязки фазы к демодулятору. Выход осциллятора контролируется входом дистанционного считывания, что позволяет сделать поправку на падение напряжения на выводах преобразователя. Этот вход дискретизируется прямоугольной волной и сравнивается с опорным входом в регуляторе амплитуды, чтобы удерживать напряжение генератора на фиксированном уровне.Эталонный вход берется из эталонного выхода или логометрического выхода. позволяет фиксировать напряжение генератора или быть пропорциональным напряжению питания.
Демодуляция и фильтрация сигнала LDVT
Описание демодулятора
Функция демодулятора состоит в том, чтобы принимать выходной сигнал переменного тока преобразователя и преобразовывать его в полезное постоянное напряжение, пропорциональное смещению, нагрузке и т. Д. Он также содержит схему, позволяющую регулировать усиление и ноль для работы с широким диапазоном преобразователей.Демодулятор работает следующим образом. Выходной сигнал преобразователя подается в схему выбора грубого усиления и затем усиливается. Этот усилитель может иметь коэффициент усиления 25 или 250, если используется опция x10, дополнительное усиление позволяет работать с датчиками с малой выходной мощностью, такими как тензодатчики.
Выполнение основного усиления с помощью сигнала переменного тока означает, что дрейф схемы уменьшается. Затем сигнал переменного тока высокого уровня передается на синхронный по фазе демодулятор, который использует прямоугольную волну от генератора для преобразования его в постоянное напряжение с некоторым наложенным переменным током.Затем он проходит через фильтр нижних частот, который удаляет большинство компонентов переменного тока, оставляя постоянное постоянное напряжение с небольшой пульсацией. Фильтр нижних частот включает в себя схему для установки грубого нуля, точного нуля и точного усиления, а также имеет соединения, позволяющие изменять характеристики фильтра.
Инновации и приложения для линейного преобразователя
Серия LD620: высокоточные датчики смещения с выходным напряжением постоянного тока Существуют многочисленные варианты установки.При желании узел катушки можно прикрепить к измеряемой величине, в то время как толкатель прикреплен к фиксированной точке. Могут использоваться различные механические связи, так что движение сердечника может быть больше или меньше движения измеряемой величины.LVDT Rig лучше подходит для испытаний на растяжение
При испытании материала на растяжение для определения его модуля упругости необходимо точно знать приложенную нагрузку и расстояние, на которое материал растягивается под этой нагрузкой. Традиционно эти параметры точно измеряются с помощью тензодатчика и датчика смещения LVDT соответственно.В последних случаях экстензометр с датчиком смещения подключается непосредственно к испытуемому образцу.Этот метод имеет два явных недостатка:
- экстензометр должен быть настроен для каждого образца и имеет тенденцию ограничивать доступ к нему.
- : если образец испытывают до предела прочности, внезапный удар может повредить датчик.
В этом альтернативном методе измерительный линейный преобразователь крепится к зажиму, фиксирующему образец, который перемещается при растяжении материала. Когда измерительная головка измерительного преобразователя перемещается вверх по наклонной поверхности клина, вертикальное движение передается пропорциональному горизонтальному движению сердечника преобразователя. Выходной сигнал линейного напряжения с преобразователя подается на цифровой вольтметр или подобное измерительное устройство, которое может быть откалибровано с учетом угла наклона поверхности, чтобы обеспечить прямое и точное измерение удлинения материала под нагрузкой.
LVDT в приложении для испытания на растяжение Поскольку прецизионный шариковый наконечник измерительного преобразователя свободно перемещается по гладкой обработанной поверхности наклона, а вал преобразователя вращается в прецизионных подшипниках, боковые напряжения вала преобразователя отсутствуют. Это дополнительно обеспечивается за счет использования очень малого угла наклона относительно направления движения, что также позволяет использовать датчик малого хода; горизонтальное перемещение сердечника преобразователя может быть в 10 раз меньше пройденного вертикального расстояния.
Измерительные преобразователиимеют высокоточные линейные выходные сигналы даже для малых ходов, поэтому калиброванное измерение удлинения испытуемого образца также является очень точным. Для очень малых удлинений, например менее 1 мм при высоких приложенных нагрузках, экстензометр с датчиком линейных перемещений будет немного более точным. Однако измерительный преобразователь предпочтительнее для большинства применений и особенно подходит при испытании таких материалов, как мягкие металлы, пластмассы и резина, которые значительно растягиваются без разрушения.
Поскольку измерительный преобразователь прикреплен к боковой стороне зажима, он не препятствует доступу к исследуемому образцу. Кроме того, его не нужно настраивать каждый раз, когда новый образец помещается в испытательную машину. Если образец разбивается, наконечник датчика просто быстрее перемещается по склону без риска повреждения. Общий дизайн очень компактный.
Преобразователи формы до изменяющейся толщины материала
Измерительные преобразователи обычно используются в промышленности для проверки того, что толщина изготовленного листового материала, такого как бумага или металл, остается в пределах указанных допусков.Если профиль измеряемой величины включает несколько различных толщин, например, сложная экструзия, может быть разработана измерительная установка, включающая ряд линейных преобразователей для контроля различных размеров. В еще одном варианте этой идеи измерительные преобразователи типа LVDT были встроены в установку, предназначенную для измерения различной толщины натурального производственного материала — обработанных шкур животных. Эти измерения профиля затем используются для построения изображения всей кожи, чтобы можно было вырезать из нее участки одинаковой толщины и использовать их с максимальной пользой; Самая тонкая кожа выбирается, возможно, для перчаток, несколько более толстые — для сумок и так далее.Датчик толщины кожи животного Как и в случае листовых материалов одинаковой толщины, обшивка пропускается для измерения толщины в основном между двумя роликами, которые могут свободно вращаться вокруг своих осей. Нижний ролик закреплен в вертикальной плоскости, чтобы служить точкой отсчета для измерения. Другой может двигаться вертикально, чтобы следовать за верхней поверхностью материала, расстояние, на которое он удаляется от исходной точки (то есть толщина материала), измеряется измерительными преобразователями. Однако, чтобы приспособиться к различной толщине обшивки, верхний валик разделен в данном случае по своей ширине на шестнадцать отдельных секций.
Каждая секция подпружинена против общего опорного шпинделя, который установлен на фиксированном расстоянии над опорным роликом. По мере того, как обшивка проходит между роликами, секции верхнего ролика удерживаются в положительном контакте с поверхностью материала с помощью пружин, но при этом они могут перемещаться вверх и вниз при изменении толщины обшивки. Отдельный измерительный преобразователь LVDT предназначен для каждой секции ролика и отслеживает изменение толщины кожи в этой точке. Во избежание бокового деформирования чувствительной головки датчика, которое может быть вызвано прямым контактом с вращающимся роликом, вертикальное смещение механически передается датчику с помощью поворотной плоской планки, которая опирается своим свободным концом на верх ролика ( см. схему вида сбоку).
Выходной сигнал напряжения преобразователя калибруется на измерительном устройстве с учетом того факта, что расстояние, перемещаемое головкой преобразователя при таком расположении, немного отличается от фактического вертикального перемещения секции ролика. Высота шпинделя опоры верхнего ролика устанавливается в соответствии со средней толщиной обшивки. Количество и ширина роликовых секций были рассчитаны таким образом, чтобы соответствовать ожиданиям самого широкого пользователя. Когда кожа проходит между роликами, записанные измерения дают точное представление о различной толщине кожи вдоль линии каждого датчика.
«Контурная карта» всей кожи, показывающая области разной толщины, создается путем обработки выходных сигналов линейного преобразователя в компьютере и представления полученных данных. Цветовые коды или монохромные тона могут использоваться для прояснения областей разной толщины, так же как разная высота земли обозначена на карте нормалей.
Любой участок кожи необходимой толщины может быть легко идентифицирован для изготовления конкретных изделий, что облегчает размещение рисунков и оптимизирует использование материала с минимальными потерями.
Использование датчиков линейных перемещений для измерения давления и нагрузки
Измерение нагрузки с помощью датчика положения При использовании в сочетании с подходящим чувствительным к усилию устройством, таким как металлическая диафрагма или контрольное кольцо, преобразователи линейных перемещений могут обеспечить высокоточные и стабильные, но относительно недорогие средства измерения давления и нагрузки.Одним из применений мембранной системы является измерение давления внутри защитной оболочки, например давления в блоке цилиндров двигателя во время разработки и испытаний.Датчик смещения, установленный внутри контрольного кольца, может иметь преимущества перед тензодатчиком при измерении очень малых нагрузок или при наличии возможности ударной нагрузки. Обычно извилистая металлическая диафрагма встраивается в стенку резервуара под давлением и отклоняется под давлением. Толщина и чувствительность диафрагмы рассчитаны на диапазон давления.
Линейный преобразователь LVDT установлен под прямым углом к диафрагме, а его удлинительный стержень сердечника прикреплен к центру диска.Доступны линейные преобразователи для рабочих температур до 600 ° C.
В качестве альтернативы для высоких температур можно использовать датчик приближения, который не контактирует с диафрагмой. Любое изгибание диафрагмы отражается сигналом выходного напряжения преобразователей. Простой микрочип можно использовать для калибровки, просто создав одно известное высокое давление и одно низкое давление, поскольку движение диска линейно с давлением в центре. В результате получается недорогой и простой датчик давления с высокой повторяемостью и надежностью.
Измерение давления с помощью датчика положения Включение датчика линейных перемещений в контрольное кольцо дает системе измерения нагрузки, имеющей значительные преимущества перед тензодатчиком в некоторых приложениях. Работая с очень небольшим фактическим движением, тензодатчики имеют тенденцию быть жесткими и нечувствительными к очень небольшим нагрузкам. Контрольное кольцо, с другой стороны, представляет собой сравнительно гибкую балку, способную более свободно перемещаться под нагрузкой — только условно, потому что пройденное расстояние должно быть меньше, чем общий ход e.г., ± 0,5 мм от линейного преобразователя. Поэтому эта система более чувствительна к легким нагрузкам.
Хотя контрольное кольцо изгибается, на самом деле оно более прочное и эластичное, чем тензодатчик. Жесткость тензодатчика имеет преимущество при быстром приложении и снятии нагрузки, поскольку жесткая система дает высокочастотный отклик. Однако, если тензодатчик ºº подвергается высокой ударной нагрузке, он может легко перегрузиться. С другой стороны, защитное кольцо может двигаться дальше, чтобы поглотить ударную нагрузку без вредного воздействия.
Использование датчика LVDT для подсчета
Высокая скорость подсчета банкнот или аналогичных листов, требующих абсолютной числовой точности, может быть достигнута с помощью простого принципа конструкции, основанного на линейных преобразователях. Выходной сигнал напряжения от этих высокочувствительных датчиков LVDT можно использовать для: индивидуального подсчета банкнот на высокой скорости; обнаруживать, когда две или более банкноты считаются вместе; выявить проклеенный ремонт; указать, когда записка стала перевернутой; и предупредить оператора об отсутствии части примечания.В стандартной конструкции машины банкноты подаются между двумя вращающимися роликами, один из которых движется в неподвижных подшипниках, а другой может двигаться линейно, чтобы изменять зазор между ними. Последний ролик удерживается в положительном контакте с банкнотой при соответствующей загрузке. На каждом конце этого подвижного ролика установлен миниатюрный линейный преобразователь для измерения его линейного смещения при прохождении банкнот через зазор.
Следовательно, когда одна банкнота проходит между роликами, сердечники LVDT смещаются на величину, равную толщине банкноты, и это создает выходные сигналы напряжения соответствующей интенсивности для обоих преобразователей.Сигнал поддерживается только тогда, когда банкнота проходит между роликами, и, таким образом, вырабатывается импульсный выходной сигнал, который можно использовать для электронного счета. Две ноты, проходящие вместе, удваивают интенсивность устойчивого сигнала и т. Д.
Другие приложения
Силовые турбины: В турбинах электростанций по всему миру используются линейные переменные дифференциальные преобразователи в качестве датчиков положения с формирователями сигналов для обеспечения необходимой рабочей мощности.Напряжения и частоты переменного тока, необходимые для индуктивных датчиков положения или датчиков положения LVDT, недоступны из источников питания.Гидравлика: Датчики линейного положения служат в качестве датчиков заряда в гидроаккумуляторах, специальных внешних датчиках в суровых условиях с высокой устойчивостью к вибрации и ударам, и включают все длины хода в пределах возможностей наших датчиков. Если вам требуется больший ход, обратитесь к нашему профессиональному инженерному персоналу в OMEGA, чтобы получить информацию о нестандартном дизайне.
Автоматизация: приложения автоматизации LVDT используют герметичные датчики измерения размеров для работы за пределами ваших лабораторий НИОКР, производственных цехов и в суровых условиях окружающей среды при автоматизации производства, средах управления технологическими процессами, измерениях МДП и промышленных измерениях. .
Самолет: В большинстве аэрокосмических / авиационных приложений используются миниатюрные или субминиатюрные датчики положения. Они представляют собой управляемые тросом механизмы определения смещения.OMEGA может разрабатывать прецизионные продукты для применения в коммерческих самолетах, космосе, авиации и экологических системах для космической среды обитания. Изделия устанавливаются в фиксированном положении, трос смещения прикрепляется к движущемуся объекту, например, шасси или элерону. Кабель втягивается и извлекается при движении. В зависимости от формирования сигнала и системы крепления электрический выход будет отображать различные скорости, углы, длину и движения.
Спутники: Рассмотрим применение в спутниковых технологиях и смежных областях, помимо производства спутников, датчики положения необходимы для космических аппаратов, грузовых самолетов, военных истребителей, беспилотных летательных аппаратов, экспериментальных самолетов, ракет, ядерных реакторов, имитаторов полета и т. Д. высокоскоростные железные дороги.
— обзор
Линейно-регулируемый дифференциальный трансформатор (LVDTS)
Линейно-регулируемый дифференциальный трансформатор (LVDT) — это точный и надежный метод измерения линейного расстояния. LVDT находят применение в современных станках, робототехнике, авионике и компьютеризованном производстве. К концу Второй мировой войны LVDT получил признание в качестве сенсорного элемента в промышленности управления технологическими процессами в значительной степени в результате его использования в самолетах, торпедах и системах вооружения.Публикация модели The Linear Variable Differential Transformer , написанной Германом Шаевицем в 1946 году (Proceedings of the SASE, Volume IV, No. 2), позволила сообществу пользователей в целом узнать о приложениях и особенностях LVDT.
LVDT (см. Рисунок 15.3.2) представляет собой датчик положения к электрическому напряжению, выходной сигнал которого пропорционален положению подвижного магнитного сердечника. Сердечник движется линейно внутри трансформатора, состоящего из центральной первичной обмотки и двух внешних вторичных обмоток, намотанных цилиндрической формы.Первичная обмотка возбуждается источником переменного напряжения (обычно несколько кГц), индуцируя вторичные напряжения, которые меняются в зависимости от положения магнитопровода внутри узла. Сердечник обычно имеет резьбу, чтобы облегчить прикрепление к неферромагнитному стержню, который, в свою очередь, прикреплен к объекту, движение или смещение которого измеряется.
Рисунок 15.3.2. Линейно-регулируемый дифференциальный трансформатор (LVDT).
Вторичные обмотки намотаны в противофазе друг с другом, и когда сердечник центрирован, напряжения в двух вторичных обмотках противостоят друг другу, и результирующее выходное напряжение равно нулю.Когда сердечник перемещается от центра, напряжение во вторичной обмотке, к которой перемещается сердечник, увеличивается, в то время как противоположное напряжение уменьшается. В результате получается дифференциальное выходное напряжение, которое изменяется линейно в зависимости от положения сердечника. Линейность превосходна во всем расчетном диапазоне перемещений, обычно 0,5% или лучше. LVDT предлагает хорошую точность, линейность, чувствительность, бесконечное разрешение, а также работу без трения и надежность.
Для различных LVDT доступно большое количество диапазонов измерения, обычно от ± 100 мкм до ± 25 см.Типичные напряжения возбуждения находятся в диапазоне от 1 В до 24 В (среднеквадратичное значение) с частотами от 50 Гц до 20 кГц. Основные характеристики Schaevitz E100 LVDT приведены на рисунке 15.3.3.
Рисунок 15.3.3. Технические характеристики Schaevitz E100 LVDT.
Обратите внимание, что истинный нуль не возникает, когда сердечник находится в центральном положении из-за несоответствия между двумя вторичными обмотками и индуктивностью рассеяния. Кроме того, простое измерение выходного напряжения V OUT не покажет, с какой стороны от нулевого положения находится сердечник.
Схема преобразования сигнала, которая устраняет эти трудности, показана на рисунке 15.3.4, где вычтены абсолютные значения двух выходных напряжений. Используя эту технику, можно измерить как положительные, так и отрицательные отклонения относительно центрального положения. В то время как диодно-конденсаторный выпрямитель можно использовать в качестве схемы абсолютного значения, прецизионный выпрямитель, показанный на рисунке 15.3.5, является более точным и линейным. Входной сигнал подается на преобразователь V / I, который, в свою очередь, управляет аналоговым умножителем.Знак дифференциального входа определяется компаратором, выход которого переключает знак выхода V / I через аналоговый умножитель. Конечный результат — точная копия абсолютного значения ввода. Эти схемы хорошо понятны разработчикам интегральных схем и их легко реализовать в современных биполярных процессах.
Рисунок 15.3.4. Улучшена обработка выходного сигнала LVDT.
Рисунок 15.3.5. Прецизионная схема абсолютного значения (двухполупериодный выпрямитель).
Стандартный формирователь сигналов AD598 LVDT, показанный на рисунке 15.3.6 (упрощенная форма) выполняет всю необходимую обработку сигнала LVDT. Встроенный генератор частоты возбуждения может быть установлен от 20 Гц до 20 кГц с помощью одного внешнего конденсатора. Две схемы абсолютного значения, за которыми следуют два фильтра, используются для определения амплитуды входов каналов A и B. Затем аналоговые схемы используются для создания логометрической функции [A-B] / [A + B]. Обратите внимание, что эта функция не зависит от амплитуды напряжения возбуждения первичной обмотки, предполагая, что сумма амплитуд выходного напряжения LVDT остается постоянной во всем рабочем диапазоне.Обычно это имеет место для большинства LVDT, но пользователь всегда должен уточнять у производителя, если это не указано в спецификации LVDT. Также обратите внимание, что этот подход требует использования 5-проводного LVDT.
Рисунок 15.3.6. Формирователь сигнала AD598 LVDT (упрощенно).
Один внешний резистор устанавливает напряжение возбуждения AD598 от приблизительно 1 В до 24 В (действующее значение). Мощность привода составляет 30 мА (среднекв.). AD598 может управлять LVDT на конце кабеля длиной 300 футов, поскольку на схему не влияют фазовые сдвиги или абсолютные величины сигнала.Диапазон выходного сигнала положения V OUT составляет ± 11 В для нагрузки 6 мА, и он может проложить до 1000 футов кабеля. Входы V A и V B могут иметь низкое среднеквадратичное значение 100 мВ.
Формирователь сигналов LVDT AD698 (см. Рисунок 15.3.7) имеет те же технические характеристики, что и AD598, но обрабатывает сигналы несколько иначе. Обратите внимание, что AD698 работает от 4-проводного LVDT и использует синхронную демодуляцию. Каждый сигнальный процессор A и B состоит из функции абсолютного значения и фильтра.Затем выход A делится на выход B, чтобы получить конечный выходной сигнал, который является логометрическим и не зависит от амплитуды напряжения возбуждения. Обратите внимание, что сумма вторичных напряжений LVDT не обязательно должна оставаться постоянной в AD698.
Рисунок 15.3.7. AD698 LVDT формирователь сигналов (упрощенный).
AD698 также может использоваться с полумостом (аналогично автотрансформатору) LVDT, как показано на рисунке 15.3.8. В этой схеме все вторичное напряжение прикладывается к процессору B, в то время как напряжение центрального отвода прикладывается к процессору A.Полумост LVDT не создает нулевого напряжения, а соотношение A / B представляет диапазон перемещения сердечника.
Рисунок 15.3.8. Конфигурация полумоста LVDT.
Следует отметить, что концепция LVDT может быть реализована в поворотной форме, и в этом случае устройство называется поворотным регулируемым дифференциальным трансформатором (RVDT). Вал эквивалентен сердечнику в LVDT, а обмотки трансформатора намотаны на неподвижную часть сборки.Однако RVDT является линейным в относительно узком диапазоне вращения и не может измерять полное вращение на 360 °. Несмотря на возможность непрерывного вращения, типичные RVDT являются линейными в диапазоне примерно ± 40 ° относительно нулевого положения (0 °). Типичная чувствительность составляет 2–3 мВ на вольт на градус вращения, при входном напряжении в диапазоне 3 В (среднеквадратичное значение) на частотах от 400 Гц до 20 кГц. Положение 0 ° отмечено на валу и корпусе.
Линейно-регулируемые дифференциальные трансформаторы | Analog Devices
Дифференциальный трансформатор линейной переменной (LVDT) — это точный и надежный метод измерения линейного расстояния.LVDT находят применение в современных станках, робототехнике, авионике и компьютеризованном производстве.
Как показано на рисунке 1, LVDT представляет собой датчик положения к электрическому напряжению, выходной сигнал которого пропорционален положению подвижного магнитного сердечника. Сердечник движется линейно внутри трансформатора, состоящего из центральной первичной обмотки и двух внешних вторичных обмоток, намотанных цилиндрической формы. Первичная обмотка возбуждается источником переменного напряжения (обычно несколько кГц), индуцируя вторичные напряжения, которые меняются в зависимости от положения магнитопровода внутри узла.Сердечник обычно имеет резьбу, чтобы облегчить прикрепление к неферромагнитному стержню, который, в свою очередь, прикреплен к объекту, движение или смещение которого измеряется.
Рисунок 1: Линейно-регулируемый дифференциальный трансформатор (LVDT)Вторичные обмотки намотаны в противофазе друг с другом. Когда сердечник отцентрован, напряжения в двух вторичных обмотках противостоят друг другу, и чистое выходное напряжение равно нулю. Когда сердечник перемещается от центра, напряжение во вторичной обмотке, к которой перемещается сердечник, увеличивается, в то время как противоположное напряжение уменьшается.В результате получается дифференциальное выходное напряжение, которое изменяется линейно в зависимости от положения сердечника. Линейность превосходна во всем расчетном диапазоне перемещений, обычно 0,5% или лучше. LVDT предлагает хорошую точность, линейность, чувствительность, бесконечное разрешение, работу без трения и механическую прочность.
Для различных LVDT доступны самые разные диапазоны измерения, обычно от ± 100 мкм до ± 25 см. Типичные напряжения возбуждения находятся в диапазоне от 1 В до 24 В (среднеквадратичное значение) с частотами от 50 Гц до 20 кГц.Обратите внимание, что истинного нуля не происходит, когда сердечник центрирован из-за несоответствия между двумя вторичными обмотками и индуктивностью рассеяния. Кроме того, простое измерение выходного напряжения, V OUT, не покажет сторону нулевого положения, на котором находится сердечник.
Рисунок 2: Улучшенная обработка выходного сигнала LVDTСхема преобразования сигнала, которая устраняет эти трудности, показана на рисунке 2, где вычтены абсолютные значения двух выходных напряжений. Используя эту технику, можно измерить как положительные, так и отрицательные отклонения относительно центрального положения.В то время как диодно-конденсаторный выпрямитель можно использовать в качестве схемы абсолютного значения, прецизионный выпрямитель, показанный на рисунке 3, является более точным и линейным. Входной сигнал подается на преобразователь V / I, который, в свою очередь, управляет аналоговым умножителем. Знак дифференциального входа определяется компаратором, выход которого переключает знак выхода V / I через аналоговый умножитель. Конечный результат — точная копия абсолютного значения ввода. Эти схемы хорошо понятны разработчикам микросхем, и их легко реализовать в современных биполярных процессах.
Рисунок 3: Прецизионная схема абсолютного значения (двухполупериодный выпрямитель)Формирователь сигналов LVDT промышленного стандарта, показанный в упрощенной форме на рисунке 4, выполняет всю необходимую обработку сигналов LVDT. Встроенный генератор частоты возбуждения может быть установлен от 20 Гц до 20 кГц с помощью одного внешнего конденсатора. Две схемы абсолютного значения, за которыми следуют два фильтра, используются для определения амплитуды входов каналов A и B. Затем аналоговые схемы используются для создания логометрической функции (A – B) / (A + B).Обратите внимание, что эта функция не зависит от амплитуды напряжения возбуждения первичной обмотки, предполагая, что сумма амплитуд выходного напряжения LVDT остается постоянной во всем рабочем диапазоне. Так обстоит дело с большинством LVDT, но пользователь всегда должен уточнять у производителя, если это не указано в спецификации LVDT. Также обратите внимание, что этот подход требует использования пятипроводного LVDT.
Рисунок 4: формирователь сигнала LVDT AD598 (упрощенно)Один внешний резистор устанавливает напряжение возбуждения AD598 в диапазоне приблизительно от 1 В до 24 В (среднеквадратичное значение).Мощность привода составляет 30 мА (среднекв.). AD598 может управлять LVDT на конце кабеля длиной 300 футов, так как на схему не влияют фазовые сдвиги или абсолютные величины сигнала. Диапазон выходного сигнала положения V OUT составляет ± 11 В для нагрузки 6 мА, и он может проложить до 1000 футов кабеля. Входы V A и V B могут снижаться до 100 мВ (среднеквадратичное значение).
Устройство формирования сигнала LVDT AD698 (рис. 5) имеет те же характеристики, что и AD598, но обрабатывает сигналы несколько иначе, используя синхронную демодуляцию.Каждый сигнальный процессор A и B состоит из функции абсолютного значения и фильтра. Затем выход A делится на выход B, чтобы получить конечный выходной сигнал, который является логометрическим и независимым от амплитуды напряжения возбуждения. Обратите внимание, что сумма вторичных напряжений LVDT не обязательно должна оставаться постоянной в AD698.
Рисунок 5: формирователь сигнала LVDT AD698 (упрощенный)AD698 также может использоваться с полумостом LVDT (аналогично автотрансформатору), как показано на рисунке 6. В этой схеме все вторичное напряжение подается на B, в то время как напряжение центрального отвода подается на процессор A.Полумост LVDT не создает нулевого напряжения, а соотношение A / B представляет собой диапазон перемещения сердечника.
Рисунок 6: Конфигурация полумоста LVDTОбратите внимание, что концепция LVDT может быть реализована во вращающейся форме, и в этом случае устройство называется вращающимся переменным дифференциальным трансформатором (RVDT). Вал эквивалентен сердечнику в LVDT, а обмотки трансформатора намотаны на неподвижную часть сборки. Однако RVDT является линейным в относительно узком диапазоне вращения и не может измерять полное вращение на 360 °.Несмотря на возможность непрерывного вращения, типичные RVDT являются линейными в диапазоне примерно ± 40 ° относительно нулевого положения (0 °). Типичная чувствительность составляет 2,5 мВ / В / градус вращения, при входном напряжении в диапазоне 3 В (среднеквадратичное значение) на частотах от 400 Гц до 20 кГц. Положение 0 ° отмечено на валу и корпусе.
Дополнительная литература
Zumbahlen, Hank, ed. Справочник по проектированию линейных схем . Newnes. 2008
CN0288 Примечание схемы | Аналоговые устройства
Теория работы
LVDT — это преобразователь абсолютного смещения, который преобразует линейное смещение или положение из механического эталона (или нуля) в пропорциональный электрический сигнал, содержащий информацию о фазе (для направления) и амплитуде (для расстояния).Работа LVDT не требует электрического контакта между подвижной частью (зонд или стержневой стержень в сборе) и трансформатором. Вместо этого он полагается на электромагнитную связь. По этой причине и поскольку они работают без каких-либо встроенных электронных схем, LVDT широко используются в приложениях, где требуется длительный срок службы и высокая надежность в суровых условиях, таких как военные и аэрокосмические приложения.
Для этой схемы используется датчик LVDT серии E-100 Economy от Measurement Specialties ™, Inc.использовался с AD598. Благодаря линейности ± 0,5% от полного диапазона, серия E подходит для большинства приложений с умеренными рабочими температурами.
AD598 — это законченная подсистема преобразования сигнала LVDT. Он преобразует механическое положение преобразователя LVDT в униполярное постоянное напряжение с высокой степенью точности и воспроизводимости. Все функции схемы включены в микросхему. С добавлением нескольких внешних пассивных компонентов для установки частоты и усиления AD598 преобразует необработанный вторичный выходной сигнал LVDT в масштабированный сигнал постоянного тока.
AD598 содержит синусоидальный генератор с низким уровнем искажений для управления первичной обмоткой LVDT. Частота синусоидальной волны определяется одним конденсатором и может находиться в диапазоне от 20 Гц до 20 кГц с амплитудами от 2 В до 20 В.
Вторичный выход LVDT состоит из двух синусоид, которые напрямую управляют AD598. AD598 обрабатывает два сигнала, делит их разность на их сумму и выдает масштабированный униполярный выходной сигнал постоянного тока. Предыдущие кондиционеры LVDT синхронно обнаруживают эту разницу амплитуд и преобразуют ее абсолютное значение в напряжение, пропорциональное положению.Этот метод использует первичное напряжение возбуждения в качестве опорной фазы для определения полярности выходного напряжения. С этой техникой связан ряд проблем. В их числе:
- Создание сигнала возбуждения с постоянной амплитудой и постоянной частотой
- Компенсация сдвига фаз LVDT между первичной и вторичной фазами
- Компенсация этих сдвигов в зависимости от температуры и частоты
AD598 устраняет все эти проблемы.AD598 не требует постоянной амплитуды, поскольку он работает на соотношении разности и суммы выходных сигналов LVDT. Сигнал постоянной частоты не требуется, поскольку входы выпрямляются и обрабатывается только величина несущей синусоидальной волны. Нет чувствительности к фазовому сдвигу между первичным выходом и выходом LVDT, потому что синхронное обнаружение не используется.
Логометрический принцип, на котором работает AD598, требует, чтобы сумма вторичных напряжений LVDT оставалась постоянной с длиной хода LVDT.Хотя производители LVDT обычно не указывают взаимосвязь между V A + V B и длиной хода, признается, что некоторые LVDT не соответствуют этому требованию. В этих случаях возникает нелинейность. Однако большинство доступных LVDT действительно соответствуют этим требованиям.
Выбор компонентов
Процедура проектирования для режима двойного питания (± 15 В), приведенная в листе технических данных AD598, была соблюдена, чтобы установить частоту возбуждения равной 2.5 кГц, полоса пропускания системы до 250 Гц, выходное напряжение от 0 В до 5 В.
Внутренний генератор AD598 создает небольшую пульсацию, которая поступает на выход, является нормальным явлением. Пассивный фильтр нижних частот используется для уменьшения этой пульсации до необходимого уровня.
При выборе номиналов конденсаторов для установки полосы пропускания системы приходится идти на компромисс. Выбор конденсаторов меньшего размера дает более широкую полосу пропускания системы, но увеличивает количество пульсаций выходного напряжения. Пульсации можно уменьшить, увеличив шунтирующую емкость на резисторе обратной связи, используемом для установки уровня выходного напряжения; однако это также увеличивает фазовую задержку.
Операционный усилитель AD8615 буферизует выходной сигнал AD598, что гарантирует, что AD7992 управляется источником с низким импедансом (высокое сопротивление источника существенно влияет на характеристики АЦП по переменному току).
Фильтр нижних частот между выходом AD598 и входом AD8615 служит двум целям:
- Ограничивает входной ток AD8615
- Фильтрует пульсации выходного напряжения.
AD8615 имеет внутреннюю схему защиты, которая позволяет подавать на вход напряжения, превышающие напряжение питания.Это важно, потому что выходное напряжение AD598 может колебаться на ± 11 В при питании ± 15 В. Пока входной ток ограничен значением менее 5 мА, на вход могут подаваться более высокие напряжения. Это в первую очередь связано с чрезвычайно низким входным током смещения AD8615 (1 пА), что позволяет использовать резисторы большего размера. Использование этих резисторов добавляет тепловой шум, который способствует общему шуму выходного напряжения усилителя.
AD8615 — идеальный усилитель для буферизации и управления входом 12-разрядного АЦП последовательного приближения AD7992 благодаря его защите от перенапряжения на входе и способности переключаться по схеме «rail-to-rail» как на входе, так и на выходе.
Анализ шума
Когда выбраны все компоненты условий сигнала, необходимо определить степень разрешения, необходимую для преобразования сигнала. Как и в большинстве анализов шума, необходимо идентифицировать только ключевые составляющие. Источники шума комбинируются по rss-методу; следовательно, любой отдельный источник шума, который как минимум в три-четыре раза больше чем кто-либо из других доминирует.
В случае схемы формирования сигнала LVDT доминирующая Источником шума на выходе является пульсация на выходе AD598.Другие источники шума (шум резистора, шум входного напряжения, и шум выходного напряжения AD8615) значительно меньше по сравнению.
Пульсации выходного напряжения AD598 составляют 0,4 мВ (среднеквадр.) При емкости конденсатора 0,39 мкФ и шунтирующем конденсаторе 10 нФ на входе. резистор обратной связи показан на рисунке 2. Обратите внимание, что эти компоненты и соответствующие штыревые соединения не показаны на упрощенной схеме на Рисунке 1; однако подробности можно найти в листе данных AD598.
Фигура 2.Пульсация выходного напряжения в зависимости от емкости фильтраМаксимальное количество отсчетов среднеквадратичных значений, которое может быть разрешено, теперь можно рассчитать путем деления выходного сигнала полной шкалы на общий среднеквадратичный шум системы.
Общее количество среднеквадратичных значений = 5 В / 0,4 мВ = 12, 500
Эффективное разрешение определяется как логарифм по основанию 2 от общего среднеквадратичного значения.
Эффективное разрешение = log 2 (12500) = 13,6 бит
Кодовое разрешение без шума может быть получено вычитанием 2.7 бит от эффективного разрешения.
Бесшумное разрешение кода = эффективное разрешение — 2,7 бит = 13,6 бит — 2,7 бит = 10,9 бит
Общий выходной динамический диапазон системы может быть рассчитан путем деления выходного сигнала полной шкалы (5 В) на общий выходной среднеквадратичный шум (0,4 мВ среднеквадратичного значения) и преобразования его в децибелы, что дает примерно 82 дБ.
Динамический диапазон = 20 log (5 В / 0,4 мВ) = 82 дБ
AD7992 является хорошим кандидатом для этого приложения, поскольку он имеет 12-битное разрешение и частоту дискретизации 188 kSPS на канал. при использовании с 3.Последовательная частота 4 МГц.
Результаты испытаний
Используя Measurement Specialties, Inc. LVDT серии E-100 Economy, подключенный к J3 и с помощью цифрового осциллографа для мониторинга выходного сигнала AD598, обнаруженного на J6 на оценочной плате EVALCN0288-SDPZ, фактическая найденная пульсация выходного сигнала составила 6,6 мВ pp, как показано на рисунке 3.
Рисунок 3. Пульсации выходного напряжения перед фильтром нижних частотФильтр нижних частот (3 кОм, 0,01 мкФ) между выходом AD598 и входом AD8615 имеет полосу пропускания по −3 дБ, равную 5.3 кГц и снижает пульсации до 2 мВ от пика до пика.
С фильтром нижних частот, установленным между выходным каскадом AD598 и входным каскадом AD8615, данные были собраны с оценочной платы EVAL-CN0288-SDPZ, как показано на рисунке 4.
Рисунок 4. Снимок экрана оценочного программного обеспечения CN-0288Пульсации от AD598 были ослаблены до 2 мВ пик-пик, и система смогла достичь 11-битного разрешения кода без шума.
Полный пакет проектной поддержки для этой схемы можно найти по адресу http: // www.analog.com/CN0288-DesignSupport.
Применения в системе обратной связи по положению на поверхности управления полетом
Беспилотные автономные транспортные средства (БПЛА) или дроны играют все возрастающую роль в обеспечении национальной безопасности Соединенных Штатов. Этими высокотехнологичными и сложными воздушными платформами управляет экипаж, находящийся за много миль, и они способны выполнять многоцелевые испытания. Они включают в себя такие функции, как воздушная разведка, платформы боевого оружия, надзор за командованием и контролем на поле боя или беспилотная дозаправочная станция в полете.
Сложные системы, используемые на БПЛА, используют множество электронных датчиков для точного управления и обратной связи. Для управления высотой (тангаж, крен и рыскание) беспилотного летательного аппарата используются исполнительные механизмы, которые воздействуют на поверхности управления полетом. Точное измерение положения этих приводов имеет решающее значение для обеспечения правильного полета по траектории.
Датчики, используемые для измерения положения привода, должны соответствовать трем основным критериям: высокая точность, высокая надежность и легкий вес.Все три этих атрибута находятся в LVDT, разработанных компанией Measurement Specialties, Inc.
.Синхронная работа нескольких LVDT
Во многих приложениях, таких как многократное измерение, большое количество LVDT используются в непосредственной близости. Если эти LVDT работают на одинаковых несущих частотах, паразитные магнитные соединение может привести к генерации нот ударов. Результирующий ноты долей могут повлиять на точность измерений сделано в этих условиях.Чтобы избежать этой ситуации, все LVDT работают синхронно.
Оценочная плата EVAL-CN0288-SDPZ может быть настроена иметь один задающий генератор между двумя LVDT путем заполнения Перемычка JP1, JP2 и JP4 с закорачивающей перемычкой и выходом JP3 безлюден. Каждая первичная обмотка LVDT управляется от собственной усилитель мощности, и, таким образом, тепловая нагрузка распределяется между AD598s.
Что такое поворотно-регулируемый дифференциальный трансформатор (RVDT)? — Определение, теория и работа
Определение: Трансформатор, который воспринимает угловое смещение проводника — это , известный как как поворотно-регулируемый дифференциальный трансформатор или RVDT.Это тип электромеханического преобразователя , который дает линейный выходной сигнал , пропорциональный входному угловому смещению .
Схема РВДТ показана на рисунке ниже. Работа RVDT аналогична LVDT. Единственное отличие состоит в том, что LVDT использует сердечник из мягкого железа для измерения смещения, тогда как RVDT использует сердечник в форме кулачка, вращающийся между первичной и вторичной обмотками с помощью вала.
Теория РВДТ
E S1 и E S2 являются вторичным напряжением, и оно изменяется в зависимости от углового смещения вала.
G — чувствительность RVDT. Вторичное напряжение определяется с помощью уравнения, показанного ниже.
Разница между E S1 — E S2 дает пропорциональное напряжение.
Сумма напряжений определяется постоянной C.
Работа LVDT
Когда сердечник находится в нулевом положении, выходные напряжения вторичной обмотки S 1 и S 2 равны и противоположны.Чистый результат нулевой позиции равен нулю. Любое угловое смещение от нулевого положения даст дифференциальное выходное напряжение. Угловое смещение прямо пропорционально дифференциальному выходному напряжению. Отклик RVDT линейный.
Дифференциальное выходное напряжение трансформатора увеличивается, когда вал вращается по часовой стрелке. И уменьшается, когда вал движется против часовой стрелки. Величина выходного напряжения зависит от углового смещения и направления вала.
Измерение положения и смещения с помощью LVDT
LVDT измеряет смещение, связывая определенное значение сигнала для любого заданного положения сердечника. Эта ассоциация значения сигнала с положением происходит через электромагнитную связь сигнала возбуждения переменного тока на первичной обмотке с сердечником и обратно на вторичные обмотки. Положение сердечника определяет, насколько сильно сигнал первичной катушки связан с каждой из вторичных катушек.Две вторичные обмотки расположены последовательно, что означает, что они намотаны последовательно, но в противоположных направлениях. В результате два сигнала на каждой вторичной обмотке сдвинуты по фазе на 180 градусов. Поэтому фаза выходного сигнала определяет направление и его амплитуду, расстояние.
На рисунке 3 показано поперечное сечение LVDT. Сердечник заставляет магнитное поле, создаваемое первичной обмоткой, передаваться на вторичные обмотки. Когда сердечник идеально отцентрован между вторичными обмотками и первичной обмоткой, как показано, индуцированное в каждой вторичной обмотке напряжение равно по амплитуде и сдвинуто по фазе на 180 градусов.Таким образом, выход LVDT (для показанного в данном случае последовательно встречного соединения) равен нулю, потому что напряжения компенсируют друг друга.
Рис. 3. Вид в разрезе сердечника и обмоток LVDT
Смещение сердечника влево (рис. 4) приводит к тому, что первая вторичная обмотка более прочно связана с первичной, чем вторая вторичная. Возникающее в результате более высокое напряжение первой вторичной обмотки по отношению ко второй вторичной обмотке вызывает выходное напряжение, которое находится в фазе с первичным напряжением.
Рис. 4. Соединение с первой вторичной обмоткой, вызванное смещением керна
Аналогичным образом, смещение сердечника вправо заставляет вторую вторичную обмотку более прочно соединяться с первичной обмоткой, чем с первой вторичной обмоткой. Более высокое напряжение второй вторичной обмотки приводит к тому, что выходное напряжение не совпадает по фазе с первичным напряжением.
Рис. 5. Соединение со вторичной вторичной обмоткой, вызванное смещением керна
Подводя итог: «LVDT точно моделирует идеальную структуру датчика смещения нулевого порядка на низкой частоте, где выходной сигнал является прямой и линейной функцией входного сигнала.Это устройство с регулируемым магнитным сопротивлением, в котором центральная первичная катушка создает магнитный поток, который передается через центральный сердечник (подвижный якорь) с симметрично намотанной вторичной катушкой с обеих сторон первичной обмотки. Таким образом, путем измерения амплитуды и фазы напряжения можно определить степень движения сердечника и направление, то есть смещение ». [1] На рисунке 6 показана линейность устройства в пределах диапазона смещения сердечника. Обратите внимание, что выходной сигнал не является линейным, поскольку ядро движется вблизи границ своего диапазона.Это связано с тем, что на сердечник от первичной обмотки передается меньший магнитный поток. Однако, поскольку LVDT имеют отличную повторяемость, нелинейность вблизи границ диапазона устройства можно предсказать с помощью функции таблицы или полиномиальной аппроксимации кривой, таким образом расширяя диапазон устройства.
Рис. 6. Пропорционально линейный отклик LVDT на смещение сердечника
LVDT: основы | LVDT Tutorial
Основы LVDT | Учебное пособие по LVDT — NewTek Sensor SolutionsНа главную Основы LVDT | Учебник LVDT
Дизайн, использование и преимущества LVDT
LVDTвыбираются, когда критически важно надежное, надежное и точное определение положения.Узнайте, почему…
Линейно-регулируемый дифференциальный трансформатор (LVDT) — это распространенный тип датчика положения, который преобразует линейное положение или движение измеряемого объекта в пропорциональный электрический выходной сигнал, который может считываться операторами и системами управления. LVDT чаще всего используются там, где диапазоны измерения варьируются от ± 0,010 дюйма (± 0,254 мм) до ± 10 дюймов (± 254 мм). LVDT могут быть разработаны для температур от криогенных диапазонов -238 ° F (-150 ° C) до 1000 ° F (537 ° C). LVDT работает без трения, очень прочен в суровых условиях, обладает превосходной точностью и воспроизводимостью, а также имеет почти бесконечный ожидаемый срок службы.
На приведенной выше анимации показан необработанный вывод LVDT, когда измеряемый объект перемещает ядро LVDT. В большинстве случаев корпус LVDT устанавливается в фиксированном положении, в то время как измеряемый объект механически связан с подвижным сердечником LVDT. По мере движения ядра вывод LVDT изменяется, как показано на анимации. Мы обсудим, как это работает более подробно.
Рисунок 1 — По мере того, как сердечник перемещается внутри LVDT, он далее входит в контакт с вторичной обмоткой, в которую он входит, и выходит из зацепления с противоположной обмоткой.Разница между S1 и S2 дает электрический сигнал, пропорциональный положению сердечника. LVDT состоит из двух компонентов: фиксированного корпуса , содержащего одну первичную обмотку с двумя вторичными обмотками S1 и S2 , и подвижного сердечника , изготовленного из ферромагнитного материала и механически связанного с измеряемым объектом. Между корпусом и сердечником нет физического контакта.Одиночная первичная обмотка центрируется в корпусе и запитывается сигналом переменного тока.Магнитно связанное сердечником, напряжение индуцируется в каждой из двух симметричных вторичных обмоток, соединенных последовательно-встречной цепью. Эффективное напряжение и выход LVDT — это разница между каждой вторичной обмоткой.
Когда ядро отодвигается от центра LVDT, известного как нулевая точка, сигнал от первичной обмотки будет передаваться одной вторичной обмотке больше, чем другой. На рисунке 1 , , когда ядро перемещается над S1 , выходное напряжение S1 увеличивается.Когда ядро перемещается над S2 , выход S2 увеличивается. Значение ( S1 — S2 ) и ( S2 — S1 ) становится линейной функцией положения сердечника, когда оно перемещается к S1 и S2 соответственно.
Типичный выход переменного тока LVDT показан на рисунке 2. По мере того, как сердечник перемещается от нулевой точки в любом направлении в пределах диапазона LVDT, выходное напряжение ( S1 — S2 ) и ( S2 — S1 ) увеличивается пропорционально. .
Рисунок 2 — Выход переменного тока увеличивается по мере удаления сердечника от нулевой точки в любом направлении. Рисунок 3 — Фаза выхода LVDT резко сдвигается на 180? когда ядро проходит через нулевую точку. На рисунке 3 показано отношение сердечника к фазовому углу между первичной и вторичной обмотками. Когда сердечник проходит через нулевую точку, фаза выходного сигнала резко сдвигается на 180 °, как показано на рисунке 3, позволяя пользователю или электронике преобразования сигнала определять, на какой стороне нуля находится сердечник.Являясь индуктивным трансформатором, LVDT требует переменного напряжения возбуждения на первичной обмотке и выдает переменный ток на выходе на вторичных обмотках. В современных LVDT требования к сигналу возбуждения составляют около 3 В среднеквадратического значения и частоты в диапазоне от 1 кГц до 10 кГц. Вспомогательная электроника и формирователи сигналов подают сигнал возбуждения и измеряют выходной сигнал. Формирователи сигналов демодулируют выходной сигнал переменного тока с низкой амплитудой и вырабатывают напряжение постоянного тока, ток или цифровой выходной сигнал, которые могут быть измерены большинством измерителей и систем управления.
В дополнение к внешнему компоненту в LVDT могут быть встроены формирователи сигналов. Часто называемые LVDT DC , пользователь может подавать вход постоянного тока и измерять выход постоянного тока, соответствующий положению сердечника. LVDT постоянного тока предлагают многие преимущества технологии LVDT с удобством подачи и считывания сигнала постоянного тока.
Рисунок 4 — Выходной сигнал формирователя сигнала LVDT представляет собой линейный сигнал постоянного тока, который может приниматься большинством систем управления и счетчиков.LVDT можно использовать для множества различных приложений. В этом примере показано, как можно использовать LVDT переменного тока в сочетании с формирователем сигнала для контроля положения клапана.