Рулевое управление ЗИЛ-130
Рулевое управление ЗИЛ-130 в целом схоже с рулевыми других большегрузных автомобилей.
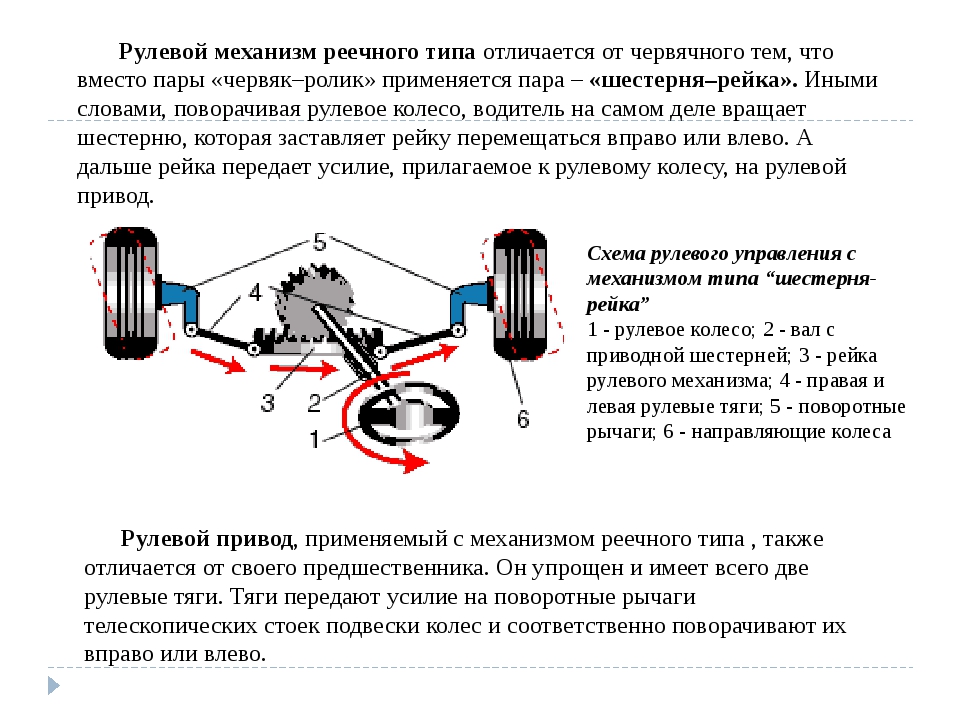
Схема рулевого управления автомобиля ЗИЛ-130
На автомобиле устанавливается гидроусилитель, объединенный в одном корпусе с рулевым механизмом. Гидроусилитель рулевого управления увеличивает усилиеприкладываемое к рулевому колесу при повороте передних колес, смягчает удары, возникающие при неровности дороги, и повышает безопасность движения, позволяет сохранять контроль за направлением движения автомобиля в случае разрыва шины переднего колеса.
Применяют в рулевом управлении ЗИЛ -130 рулевой механизм с передачей типа винт, гайка, рейка, селектор с усилителем. Усилитель рулевого управления объединен вместе с рулевой передачей в один узел и имеет гидропривод от насоса, который продвигается клиновидным ремнем от шкива коленчатого вала двигателя автомобиля.
Рулевая колонка объединена с рулевым механизмом, через короткий карданный вал, потому что оси рулевого вала и рулевого механизма не совпадают.
Гайка оснащена резьбой в виде полукруглой канавки, куда заложены шарики. Благодаря шарикам гайка закреплена винтом, он в свою очередь, соединяется с рулевым валом. В верхней части картера к нему прикреплен корпус клапана управление гидроусилителем. Управляющим элементом в клапане служит золотник.
Исполнительным механизмом гидроусилителя является поршень-рейка, установленная в цилиндре картера с помощью поршневых колец. Рейка поршня соединяется нарезкой с зубчатым селектором вала сошки.
Как работает рулевое управление на автомобиле ЗИЛ-130
Вращение рулевого вала осуществляется передачей рулевого механизма в хождение гайки-поршня по винту. При этом зубья рейки проворачивают селектор и вал с прикрепленной к нему сошкой, благодаря чему осуществляется поворот управляемых колес.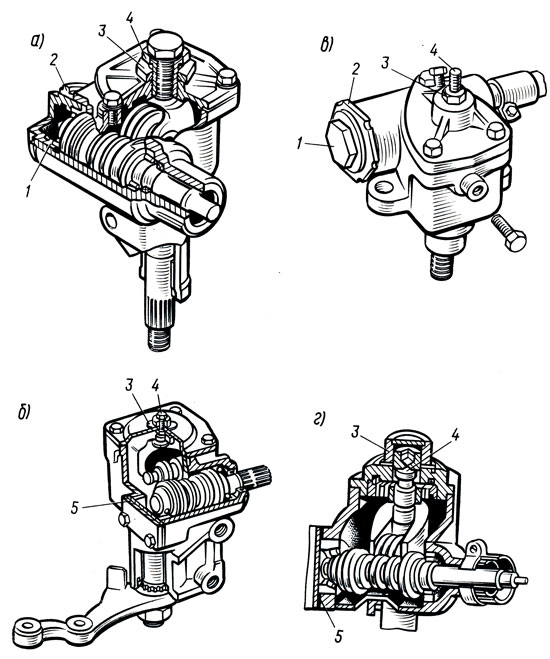
При заведенном двигателе насос гидроусилителя качает масло под давлением в гидроусилитель, и при совершении поворота он выдает дополнительное усилие, прикладываемое к рулевому приводу. Принцип действия усилителя основывается на прикладывании давления масла на торцы пошня-рейки, которое создает дополнительную силу, перемещающую поршень и облегчающую поворот управляемых колес автомобиля.
Рулевой механизм штабелера Xilin CDDR15-II в Москве
Характеристики
Модель : ЗИП Xilin CDDR15-II
Каталог : рулевой механизм
Цена: по запросу
Описание
Каталог запасных частей рулевого механизма штабелера Xilin CDDR15-II.
Для заказа запасных частей, выпишите номера нужных вам артикулов из списка ниже, после чего пришлите их нам по почте или воспользуйтесь клавишей «Заказать» на этой странице.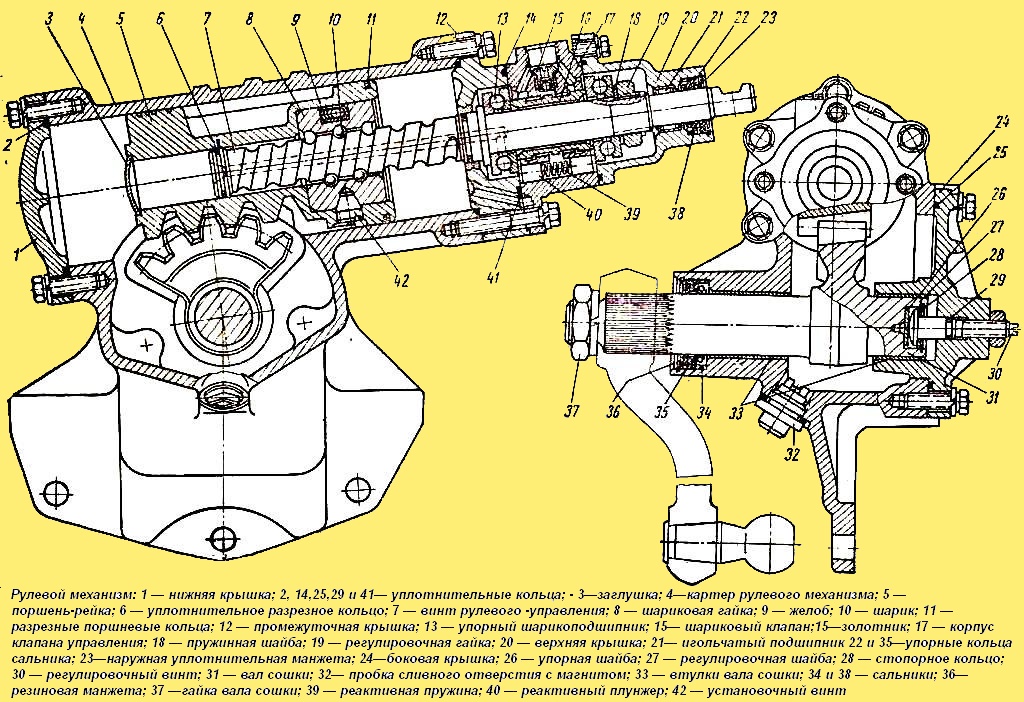
Если в ходе подбора возникли какие-либо вопросы, позвоните нам, обязательно поможем.
| No. | Код | Артикул | Описание | Кол-во |
| 1 | TEMO-200 | 060704130 | Ручка управления(Frei) | 1 |
| 2 | GB70-85 | 0908240045 | Винт М8=16 | 2 |
| 3 | CDD15RZ.08.02-00A | 31051004002 | Ручка | 1 |
| 4 | GB70-85 | 0908240047 | Винт М8=20 | 1 |
| 5 | CDD15RZ.08-01 | 061411044 | Демпфирующая пружина | 1 |
| 6 | CDD15RZ.08.01-00 | 5103010106006 | Установочная пластина | 1 |
| 7 | CDD15RZ.08-02 | 31051004009 | Планка | 1 |
| 8 | GB/T 894.1-1986 | 0908320004 | Стопорное кольцо для вала 10 | 1 |
| 9 | CDD15RZ. 08-04A 08-04A | 31051004003 | Стопорный винт ходового выключателя | 1 |
| 10 | GB70-85 | 0908240005 | Винт М4=25 | 2 |
| 11 | TM1704 | 060907022 | Микро переключатель | 1 |
| 12 | GB70-85 | 0908240022 | Винт М6=16 | 2 |
| 13 | GB818-86 | 0908280021 | Крест с полукруглой головкой Винт M6X12 | 4 |
| 14 | CDD15RZ-12 | 120703026 | Обложка | 1 |
| 15 | GB93-1987 | 0908370014 | Пружинная шайба 10 | 8 |
| 16 | GB70-85 | 0908240073 | Винт М10=30 | 8 |
| 17 | CDD15RZ.08-05 | 0909160044 | Винт М16×1,5 | 2 |
| 18 | SF-1F | 0907040129 | Подшипник 22150 | 2 |
| 19 | CDD15RZ.08-03 | 0904170024 | Резиновый блок | 1 |
| 20 | CDD15RZ-13 | 120703025 | Крышка | 1 |
| 21 | LDL250R-00 | 3026003 | Ведущее колесо + редуктор в сборе | 1 |
5.
 1. Рулевое управление автомобилей МАЗ. Устройство. Рулевой механизм с встроенным распределителем. — «ВАЖНО ВСЕМ»
1. Рулевое управление автомобилей МАЗ. Устройство. Рулевой механизм с встроенным распределителем. — «ВАЖНО ВСЕМ»Ремонт, обслуживание и эксплуатация автомобилей семейства МАЗ (МАЗ-5335, МАЗ-53352, МАЗ-516Б, МАЗ-5549, МАЗ-5429, МАЗ-504В, МАЗ-64227, МАЗ-54322, МАЗ-5440, МАЗ-6430, МАЗ-5516, МАЗ-64228-9506, МАЗ-6317, МАЗ-63171).
Рулевое управление включает в себя рулевой механизм 10 (рис.78) с встроенным распределителем, колонку 2, рулевое колесо 1, силовой цилиндр 9, насос 3, масляный бак 4, а также шланги.
Рулевой механизм с встроенным распределителем. Рулевой механизм (рис.79) состоит из винта 2 и шариковой гайки-рейки 4, находящихся в зацеплении с зубчатым сектором 8. Полукруглые резьбовые канавки на винте 2 и гайке-рейке 4 образуют спиральный канал, который заполняется при сборке руля шариками высокой точности 5. Комплектность деталей, принятую при заводской сборке (винт, гайка-рейка, шарики), нарушать не разрешается.
Зубчатый сектор 8 установлен в подшипниках скольжения 13, запрессованных в эксцентричные втулки 12 с рядом отверстий 11 на торцах. Ось наружной поверхности втулок 12 смещена относительно оси отверстия подшипников 13 на величину эксцентриситета «h», что даёт возможность регулировать зубчатое зацепление поворотом втулок 12. Регулировка натяга подшипников 1 осуществляется с помощью прокладок 9.
Распределитель гидроусилителя руля — золотникового типа, встроен в рулевой механизм. В корпусе 6 (рис.80) золотника 26 имеются три кольцевых расточки C, E, D. Средняя расточка Е соединяется с каналом В для подвода рабочей жидкости от насоса, а крайние С и D — с каналам А для отвода жидкости на слив. В трёх реактивных камерах корпуса 6 свободно с возможностью осевого перемещения размещены плунжеры 25.
перемещения, а винтовым соединением с входным валом 18.
 Шлицевое соединение вала 18 и винта 28 выполнено с зазором. Зазор выбирают из условия обеспечения полного хода золотника. Кроме того, входной вал 18 соединён торсионом 20 с винтом 28 рулевого механизма. В канал средней расточки Е ввёрнут обратный клапан 7.
Шлицевое соединение вала 18 и винта 28 выполнено с зазором. Зазор выбирают из условия обеспечения полного хода золотника. Кроме того, входной вал 18 соединён торсионом 20 с винтом 28 рулевого механизма. В канал средней расточки Е ввёрнут обратный клапан 7.
При прямолинейном движении автомобиля золотник (рис.80,1) занимает нейтральное положение и рабочая жидкость от насоса 18 поступает к средней расточке Е (см.рис.80) корпуса золотника по маслопроводу 11 (см.рис.81,1) и через крайние расточки С и D(см.рис.80) на слив по маслопроводу 13 (см.рис.81,1), заполняя при этом реактивные камеры между плунжерами 6 и через каналы К и F (см.рис.80) в корпусе по трубопроводам 8 и 12 (см.рис.81,1) полости силового цилиндра 17.
 Винтовое соединение при этом перемещает золотник и практически не нагружается. При смещении золотника, величина которого ограничена зазорам, в шлицевом соединении, прекращается доступ рабочей жидкости к кольцевой расточке С (см.рис.80). Рабочая жидкость от насоса подаётся к средней расточке Е, в затем через канал К в корпусе и трубопровод 12 (см.рис.81.ІІ) поступает в подпоршневую полость силового цилиндра 17, в результате его поршень 19 со штоком 16 перемещается, поворачивается по часовой стрелке вал сектора с сошкой 4, и через продольную тягу 15 поворачивает управляемые колёса влево. Из штоковой полости силового цилиндра рабочая жидкость по маслопроводу 8 и каналу Г (см.рис.80) в корпусе поступает в кольцевую расточку D и далее по маслопроводу 13 (см.рис.81,ΙΙ) в масляный бак 10.
Винтовое соединение при этом перемещает золотник и практически не нагружается. При смещении золотника, величина которого ограничена зазорам, в шлицевом соединении, прекращается доступ рабочей жидкости к кольцевой расточке С (см.рис.80). Рабочая жидкость от насоса подаётся к средней расточке Е, в затем через канал К в корпусе и трубопровод 12 (см.рис.81.ІІ) поступает в подпоршневую полость силового цилиндра 17, в результате его поршень 19 со штоком 16 перемещается, поворачивается по часовой стрелке вал сектора с сошкой 4, и через продольную тягу 15 поворачивает управляемые колёса влево. Из штоковой полости силового цилиндра рабочая жидкость по маслопроводу 8 и каналу Г (см.рис.80) в корпусе поступает в кольцевую расточку D и далее по маслопроводу 13 (см.рис.81,ΙΙ) в масляный бак 10. 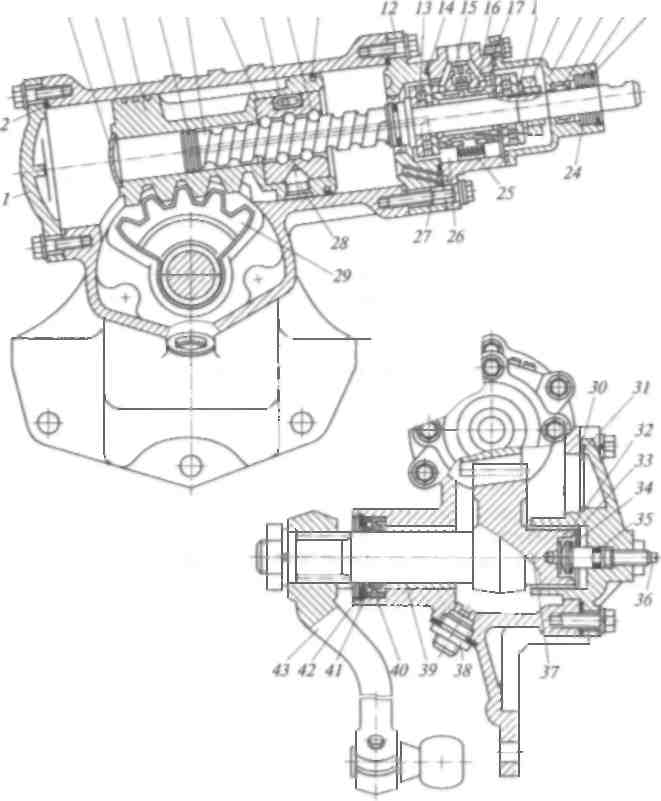 рис.81.ΙΙΙ) в штоковую полость цилиндра. Поршень со штоком перемещается, поворачивая против часовой стрелки сошку 14, и через продольную тягу поворачивает управляемые колёса вправо. Из подпоршневой полости цилиндра рабочая жидкость по маслопроводу 12 и каналу К (см.рис.80) в корпусе поступает в кольцевую расточку С и далее по маслопроводу 13 (см.рис.81.ΙΙΙ) в маслянный бак.
рис.81.ΙΙΙ) в штоковую полость цилиндра. Поршень со штоком перемещается, поворачивая против часовой стрелки сошку 14, и через продольную тягу поворачивает управляемые колёса вправо. Из подпоршневой полости цилиндра рабочая жидкость по маслопроводу 12 и каналу К (см.рис.80) в корпусе поступает в кольцевую расточку С и далее по маслопроводу 13 (см.рис.81.ΙΙΙ) в маслянный бак.При увеличении момента сопротивления повороту управляемых колёс увеличивается давление рабочей жидкости в системе и, следовательно, в реактивных камерах, что вызывает пропорциональное увеличение усилия на рулевом колесе. Таким образом, у водителя создаётся «чувство дороги». При снятии усилия с рулевого колеса, торсион 2 и плунжеры 6 возвращают золотник в нейтральное положение.
При неработающем насосе или недостаточной эффективности гидроусилителя выбирается зазор «n» в шлицевом соединении вала 1 с валом 7 и усилие от рулевого колеса передаётся как в ручном управлении без усилителя. При этом обратный клапан 9 перепускает рабочую жидкость из одной полости силового цилиндра в другую.

Похожие статьи:
МАЗ. Ремонт, обслуживание и эксплуатация автомобилей семейства МАЗ → 3.1.2. Трансмиссия автомобилей МАЗ. Сцепление и его привод. Ремонт
МАЗ. Ремонт, обслуживание и эксплуатация автомобилей семейства МАЗ → 3.3.3. Специальные методы ремонта узлов и деталей карданной передачи автомобиля МАЗ
МАЗ. Ремонт, обслуживание и эксплуатация автомобилей семейства МАЗ → 6.3.2. Тормозные системы автомобилей МАЗ. Пневматический привод. Регулятор давления с предохранительным клапаном. Ремонт
МАЗ. Ремонт, обслуживание и эксплуатация автомобилей семейства МАЗ → 6.1. Тормозные системы автомобилей МАЗ. Устройство. Тормозные механизмы
МАЗ. Ремонт, обслуживание и эксплуатация автомобилей семейства МАЗ → 7.2.4. Электрооборудование автомобилей МАЗ. Электрофакельное подогревательное устройство . Устройство. Техническое обслуживание и ремонт
Расчет рулевого управления автомобиля. Механизмы управления автомобиля Основные технические параметры
Рулевой привод, представляющий собой систему тяг и рычагов, служит для передачи усилия от сошки на поворотные цапфы и осуществления заданной зависимости между углами поворота управляемых колес.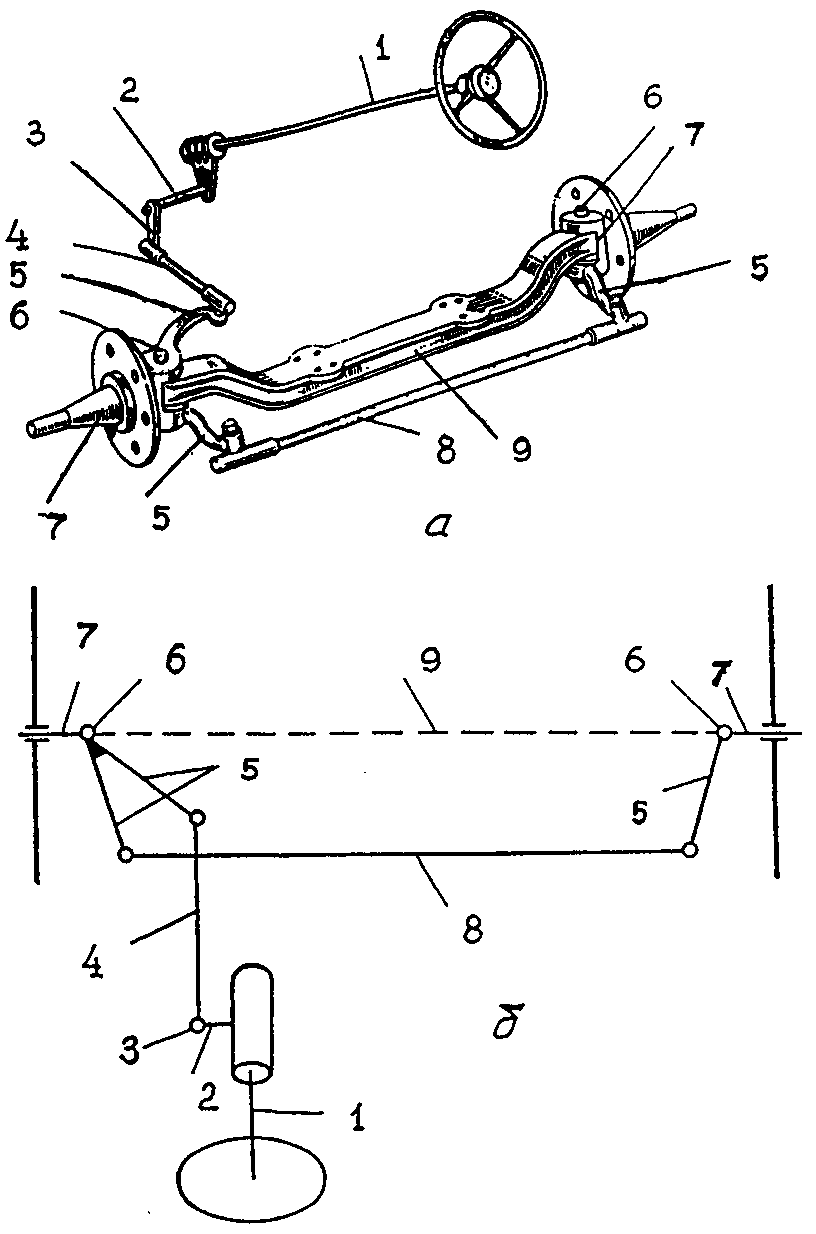 При проектировании рулевых управлений выполняют кинетический и силовой расчет рулевого привода и прочностной расчет узлов и деталей рулевого управления.
При проектировании рулевых управлений выполняют кинетический и силовой расчет рулевого привода и прочностной расчет узлов и деталей рулевого управления.
Основной задачей кинематического расчета рулевого привода является определение углов поворота управляемых колес, нахождении передаточных чисел рулевого механизма, привода и управления в целом, выбор параметров рулевой трапеции и согласовании кинематики рулевого управления и подвески. Исходя из геометрии поворота троллейбуса (рис. 50) при условии, что управляемые передние колеса катятся без проскальзывания и их мгновенный центр поворота лежит на пересечении осей вращения всех колес наружный , и внутренний углы поворота колес связаны зависимостью:
, (4)
где — расстояние между точками пересечения осей шкворней с опорной поверхностью.
Рисунок 50. Схема поворота троллейбуса без учета боковой эластичности шин.
Из полученного выражения (4) следует, что разность котангенсов углов поворота внешнего и внутреннего управляемых колес должна быть всегда величиной постоянной, а мгновенный центр поворота троллейбуса (точка 0) должен лежать на продолжении неуправляемой оси.
Только при соблюдении этих теоретических условий вес колеса троллейбуса на повороте будут двигаться без скольжения, т.е. иметь чистое качение. От рулевой трапеции требуется, чтобы она обеспечивала вытекающие из геометрии поворота соотношения между углами поворота управляемых колес.
Параметрами рулевой трапеции являются шкворневая ширина (рис. 51), расстояние п между центрами шаровых шарниров рычагов трапеции; длина т и угол θ наклона рычагов поворотных цапф. Подбор параметров трапеции при жестких в боковом направлении управляемых колесах начинается с определения угла θ наклона рычагов трапеции. Они располагаются таким образом, чтобы а — (0.7…0.8,)L при заднем расположении поперечной тяги. Угол θ может быть найден для максимальных теоретических углов и по формуле:
или по графикам, приведенным на (рис.7б). Значение угла θ = 66…74°, а отношение длины рычагов к длине поперечной тяги т/п = 0. 12….0.16. Длину m принимают возможно большей по условиям компоновки. Тогда
12….0.16. Длину m принимают возможно большей по условиям компоновки. Тогда
.
Рисунок 51. Схема рулевой трапеции и зависимость а/L от l 0 /L 1-3: при m/n равном соответственно 0,12; 0.14; 0,16
Общее кинематическое передаточное число рулевого управления, определяемое передаточными числами механизма U м и привода U пк равно отношению полного угла поворота рулевого колеса к углу поворота колеса от упора до упора
.
Для нормальной работы рулевого привода максимальное значение углов а, и а, находится в пределах
. Для троллейбусов суммарное число оборотов рулевого колеса при повороте управляемых колес на 40 о (± 20°) от нейтрального положения не должно превышать 3,5 ( = 1260 о) без учета угла свободного поворота рулевого колеса, что соответствует .
Схематическую компоновку рулевого привода выполняют для определения размеров и расположения в пространстве сошки, тяг и рычагов, а также передаточного числа привода.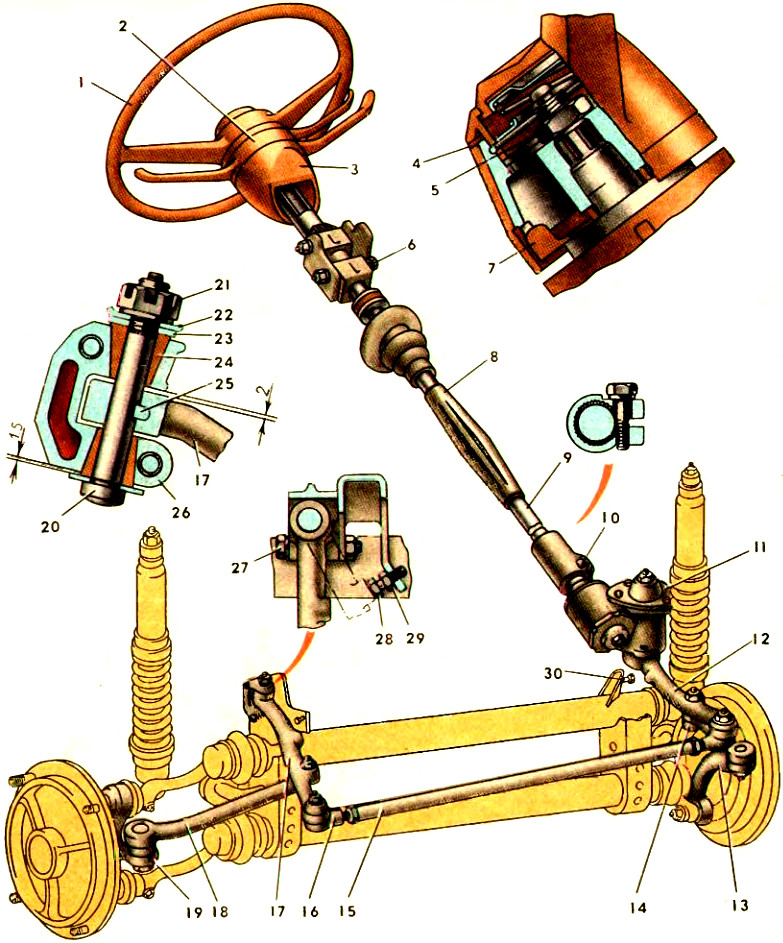 При этом стремятся обеспечить одновременную симметричность крайних положений сошки относительно ее нейтрального положения, а также равенство кинематических передаточных чисел привода при повороте колес как вправо, так и влево. Если углы между сошкой и продольной тягой, а также между тягой и поворотным рычагом в его крайнем положении приблизительно одинаковы, то эти условия выполняются.
При этом стремятся обеспечить одновременную симметричность крайних положений сошки относительно ее нейтрального положения, а также равенство кинематических передаточных чисел привода при повороте колес как вправо, так и влево. Если углы между сошкой и продольной тягой, а также между тягой и поворотным рычагом в его крайнем положении приблизительно одинаковы, то эти условия выполняются.
В силовом расчете определяются усилия: необходимые для поворота управляемых колес на месте, развиваемые цилиндром усилителя; на рулевом колесе при работающем и неработающем усилителе; на рулевом колесе со стороны реактивных элементов распределителя; на колесах при торможении; на отдельных деталях рулевого управления.
Сила F , необходимая для поворота управляемых колес на горизонтальной поверхности троллейбуса, находится исходя из суммарного момента М Σ на цапфах управляемых колес:
где М f –момент сопротивления перекатыванию управляемых колес при повороте вокруг шкворней; М φ –момент сопротивления деформации шин и трения в контакте с опорной поверхностью в следствии проскальзывания шины; М β , М φ –моменты обусловленные поперечным и продольным наклоном шкворней (рис. 8).
8).
Рисунок 52. К расчету момента сопротивления повороту колеса.
Момент сопротивления перекатыванию управляемых колес при повороте вокруг шкворней определяется зависимостью:
,
где f – коэффициент сопротивления перекатыванию; G 1 – осевая нагрузка передаваемая управляемыми колесами; – радиус обкатки колеса вокруг оси шкворня: =0.06…0.08 м; l –длина цапфы; r 0 –расчетный радиус колеса; λ – угол развала колес; β – угол наклона шкворня.
Момент сопротивления деформации шин и трения в контакте с опорной поверхностью в следствии проскальзывания шины определяются зависимостью:
,
где – плечо силы трения скольжения относительно центра отпечатка шины.
Если принять, что давление по площади отпечатка распределяется равномерно,
,
где – свободный радиус колеса. В случае, когда .
При расчетах коэффициент сцепления с опорной поверхностью выбирают максимальным φ= 0. 8.
8.
Моменты, обусловленные поперечным и продольным наклоном шкворней, равны:
где — средний угол поворота колеса; ; γ – угол наклона шкворня назад.
Усилие на ободе рулевого колеса
,
где – радиус рулевого колеса; η – КПД рулевого управления: η= 0.7…0.85.
Отправить свою хорошую работу в базу знаний просто. Используйте форму, расположенную ниже
Студенты, аспиранты, молодые ученые, использующие базу знаний в своей учебе и работе, будут вам очень благодарны.
Размещено на http://www.allbest.ru/
Механизмы управления
1. Рулевое управление
Назначение рулевого управления и схема поворота автомобиля
Рулевое управление служит для изменения направления движения автомобиля поворотом передних управляемых колес. Оно состоит из рулевого механизма и рулевого привода. На грузовых автомобилях большой грузоподъемности в рулевом управлении применяют усилитель, который облегчает управление автомобилем, уменьшает толчки на рулевое колесо и повышает безопасность движения.
Схема поворота автомобиля
Рулевой механизм служит для увеличения и передачи на рулевой привод усилия, прилагаемого водителем к рулевому колесу. Рулевой механизм преобразует вращение рулевого колеса в поступательное перемещение тяг привода, вызывающее поворот управляемых колес. При этом усилие, передаваемое водителем, от рулевого колеса к поворачиваемым колесам, возрастает во много раз.
Рулевой привод совместно с рулевым механизмом передает управляющее усилие от водителя непосредственно к колесам и обеспечивает этим поворот управляемых колес на задаваемый угол.
Чтобы совершить поворот без бокового скольжения колес, все они должны катиться по дугам разной длины, описанным из центра поворота О см. рис. При этом передние управляемые колеса должны поворачиваться на разные углы. Внутреннее по отношению к центру поворота колесо должно поворачиваться на угол альфа-В, наружное — на меньший угол альфа-Н. Это обеспечивается соединением тяг и рычагов рулевого привода в форме трапеции. Основанием трапеции служит балка 1 переднего моста автомобиля, боковыми сторонами являются левый 4 и правый 2 поворотные рычаги, а вершину трапеции образует поперечная тяга 3, которая соединяется с рычагами шарнирно. К рычагам 4 и 2 жестко присоединены поворотные цапфы 5 колес.
Основанием трапеции служит балка 1 переднего моста автомобиля, боковыми сторонами являются левый 4 и правый 2 поворотные рычаги, а вершину трапеции образует поперечная тяга 3, которая соединяется с рычагами шарнирно. К рычагам 4 и 2 жестко присоединены поворотные цапфы 5 колес.
Один из поворотных рычагов, чаще всего левый рычаг 4, имеет связь с рулевым механизмом через продольную тягу 6. Таким образом, при приведении в действие рулевого механизма продольная тяга, перемещаясь вперед или назад, вызывает поворот обоих колес на разные углы в соответствии со схемой поворота.
механизм управление рулевой автомобиль
Схемы рулевого управления
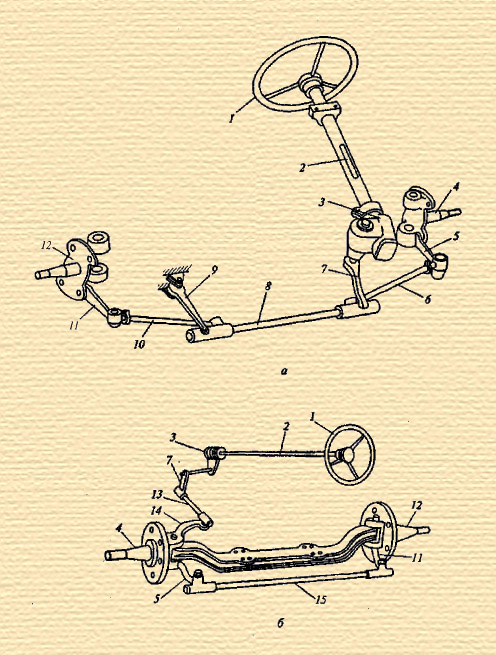
Расположение и взаимодействие деталей рулевого управления, не имеющего усилителя, можно рассмотреть на схеме (см. рисунок). Здесь рулевой механизм состоит из рулевого колеса 3, рулевого вала 2 и рулевой передачи 1, образованной зацеплением червячной шестерни (червяка) с зубчатым стопором, на вал которого крепится сошка 9 рулевого привода. Сошка и все остальные детали рулевого управления: продольная тяга 8, верхний рычаг левой поворотной цапфы 7, нижние рычаги 5 левой и правой поворотных цапф, поперечная тяга 6 составляют рулевой привод.
Поворот управляемых колес происходит при вращении рулевого колеса 3, которое через вал 2 передает вращение рулевой передаче 1. При этом червяк передачи, находящийся в зацеплении с сектором, начинает перемещать сектор вверх или вниз по своей нарезке. Вал сектора приходит во вращение и отклоняет сошку 9, которая своим верхним концом насажена на выступающую часть вала сектора. Отклонение сошки передается продольной тяге 8, которая перемещается вдоль своей оси. Продольная тяга 8 связана через верхний рычаг 7 с поворотной цапфой 4, поэтому ее перемещение вызывает поворот левой поворотной цапфы. От нее усилие поворота через нижние рычаги 5 и поперечную тягу 6 передается правой цапфе. Таким образом происходит поворот обоих колес.
Управляемые колеса поворачиваются рулевым управлением на ограниченный угол, равный 28-35°. Ограничение вводится для того, чтобы исключить при повороте задевание колесами деталей подвески или кузова автомобиля.
Конструкция рулевого управления очень сильно зависит от типа подвески управляемых колес. При зависимой подвеске передних колес в принципе сохраняется схема рулевого управления, приведенная на (рис. а), при независимой подвеске (рис. 6) рулевой привод несколько усложняется.
2. Основные типы рулевых механизмов и приводов
Рулевой механизм
Он обеспечивает поворот управляемых колес с небольшим усилием на рулевом колесе. Это может быть достигнуто за счет увеличения передаточного числа рулевого механизма. Однако передаточное число ограничено количеством оборотов рулевого колеса. Если выбрать передаточное число с количеством оборотов рулевого колеса больше 2-3, то существенно увеличивается время, требуемое на поворот автомобиля, а это недопустимо по условиям движения. Поэтому передаточное число в рулевых механизмах ограничивают в пределах 20-30, а для уменьшения усилия на рулевом колесе в рулевой механизм или привод встраивают усилитель.
Ограничение передаточного числа рулевого механизма также связано со свойством обратимости, т. е. способностью передавать обратное вращение через механизм на рулевое колесо. При больших передаточных числах увеличивается трение в зацеплениях механизма, свойство обратимости пропадает и самовозврат управляемых колес после поворота в прямолинейное положение оказывается невозможным.
Рулевые механизмы в зависимости от типа рулевой передачи разделяют на:
· червячные,
· винтовые,
· шестеренчатые.
Рулевой механизм с передачей типа червяк — ролик имеет в качестве ведущего звена червяк, закрепленный на рулевом валу, а ролик установлен на роликовом подшипнике на одном валу с сошкой. Чтобы сделать полное зацепление при большом угле поворота червяка, нарезку червяка выполняют по дуге окружности — глобоиде. Такой червяк называют глобоидным.
В винтовом механизме вращение винта, связанного с рулевым валом, передается гайке, которая заканчивается рейкой, зацепленной с зубчатым сектором, а сектор установлен на одном валу с сошкой. Такой рулевой механизм образован рулевой передачей типа винт-гайка-сектор.
В шестеренчатых рулевых механизмах рулевая передача образуется цилиндрическими или коническими шестернями, к ним же относят передачу типа шестерня-рейка. В последних цилиндрическая шестерня связана с рулевым валом, а рейка, зацепленная с зубьями шестерни, выполняет роль поперечной тяги. Реечные передачи и передачи типа червяк-ролик преимущественно применяют на легковых автомобилях, так как обеспечивают сравнительно небольшое передаточное число. Для грузовых автомобилей используют рулевые передачи типа червяк-сектор и винт-гайка-сектор, снабженные либо встроенными в механизм усилителями, либо усилителями, вынесенными в рулевой привод.
Рулевой привод
Рулевой привод предназначен для передачи усилия от рулевого механизма на управляемые колеса, обеспечивая при этом их поворот на неодинаковые углы. Конструкции рулевого привода различаются расположением рычагов и тяг, составляющих рулевую трапецию, по отношению к передней оси. Если рулевая трапеция находится впереди передней оси, то такая конструкция рулевого привода называется передней рулевой трапецией, при заднем расположении — задней трапецией. Большое влияние на конструктивное исполнение и схему рулевой трапеции оказывает конструкция подвески передних колес.
При зависимой подвеске рулевой привод имеет более простую конструкцию, так как состоит из минимума деталей. Поперечная рулевая тяга в этом случае сделана цельной, а сошка качается в плоскости, параллельной продольной оси автомобиля. Можно сделать привод и с сошкой, качающейся в плоскости, параллельной переднему мосту. Тогда продольная тяга будет отсутствовать, а усилие от сошки передается прямо на две поперечные тяги, связанные с цапфами колес.
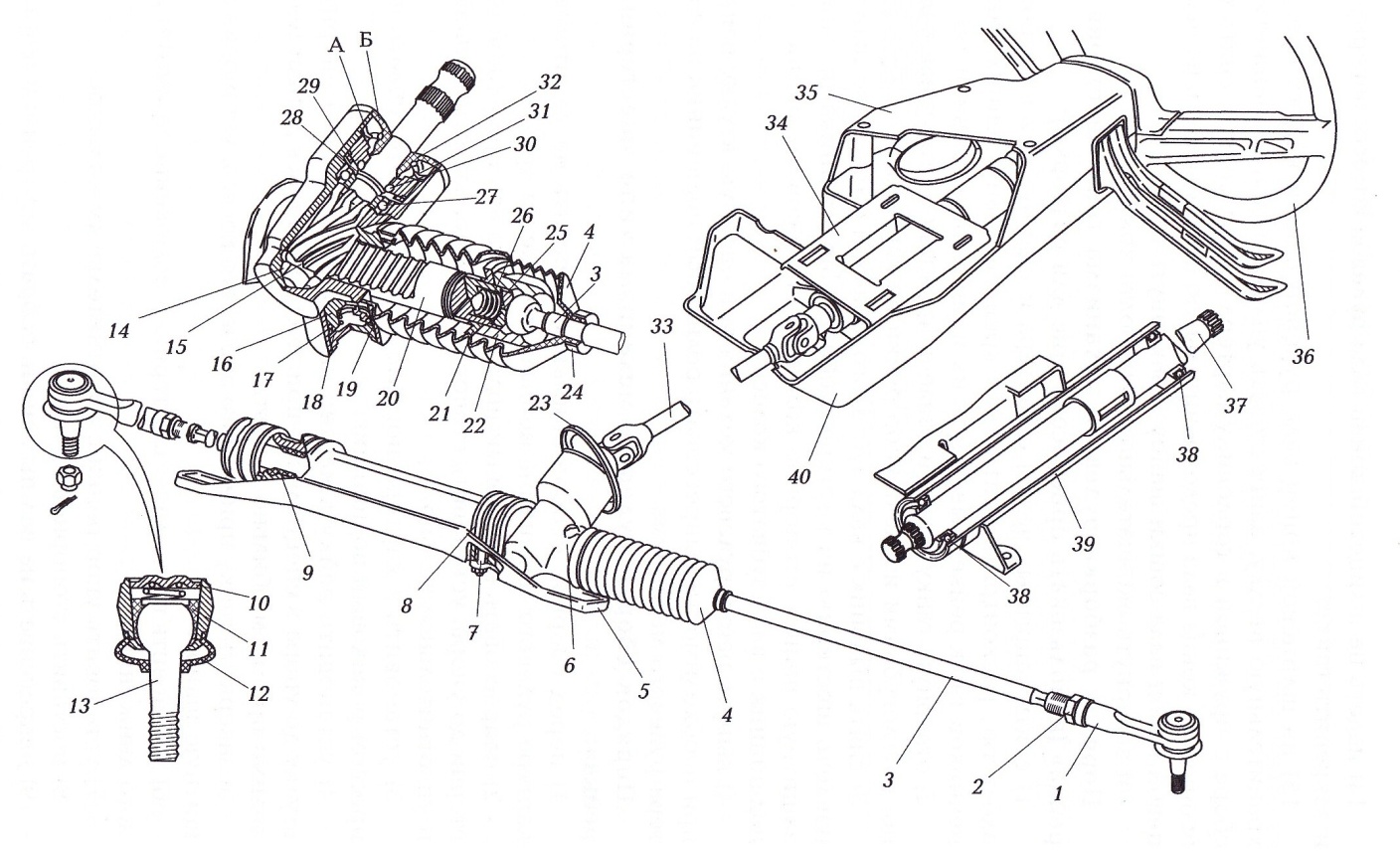
При независимой подвеске передних колес схема рулевого привода конструктивно сложнее. В этом случае появляются дополнительные детали привода, которых нет в схеме с зависимой подвеской колес. Изменяется конструкция поперечной рулевой тяги. Она сделана расчлененной, состоящей из трех частей: основной поперечной тяги 4 и двух боковых тяг — левой 3 и правой 6. Для опоры основной тяги 4 служит маятниковый рычаг 5, который по форме и размерам соответствует сошке 1. Соединение боковых поперечных тяг с поворотными рычагами 2 цапф и с основной поперечной тягой выполнено с помощью шарниров, которые допускают независимые перемещения колес в вертикальной плоскости. Рассмотренная схема рулевого привода применяется главным образом на легковых автомобилях.
Рулевой привод, являясь частью рулевого управления автомобиля, обеспечивает не только возможность поворота управляемых колес, но и допускает колебания колес при наезде ими на неровности дороги. При этом детали привода получают относительные перемещения в вертикальной и горизонтальной плоскостях и на повороте передают усилия, поворачивающие колеса. Соединение деталей при любой схеме привода производят с помощью шарниров шаровых либо цилиндрических.
3. Устройство и работа рулевых механизмов
Рулевой механизм с передачей типа червяк — ролик
Он широко распространен на легковых и грузовых автомобилях. Основными деталями рулевого механизма являются рулевое колесо 4, рулевой вал 5, установленный в рулевой колонке 3 и соединенный с глобоидным червяком 1. Червяк установлен в картере 6 рулевой передачи на двух конических подшипниках 2 и зацеплен с трехгребневым роликом 7, который вращается на шарикоподшипниках на оси. Ось ролика закреплена в вильчатом кривошипе вала 8 сошки, опирающемся на втулку и роликовый подшипник в картере 6. Зацепление червяка и ролика регулируют болтом 9, в паз которого вставлен ступенчатый хвостовик вала сошки. Фиксация заданного зазора в зацеплении червяка с роликом производится фигурной шайбой со штифтом и гайкой.
Рулевой механизм автомобиля ГАЗ-53А
Картер 6 рулевой передачи закреплен болтами к лонжерону рамы. Верхний конец рулевого вала имеет конические шлицы, на которые посажено и закреплено гайкой рулевое колесо.
Рулевой механизм с передачей типа винт — гайк а — рейка — сектор с усилителем
Его применяют в рулевом управлении автомобиля ЗИЛ-130. Усилитель рулевого управления объединен конструктивно с рулевой передачей в один агрегат и имеет гидропривод от насоса 2, который приводится в действие клиновым ремнем от шкива коленчатого вала. Рулевая колонка 4 соединена с рулевым механизмом 1 через короткий карданный вал 3, так как оси рулевого вала и рулевого механизма не совпадают. Это сделано для уменьшения габаритных размеров рулевого управления.
Рулевой механизм автомобиля
На следующем рисунке показано устройство рулевого механизма. Основной частью его является картер 1, имеющий форму цилиндра. Внутри цилиндра размещены поршень — рейка 10 с жестко закрепленной в нем гайкой 3. Гайка имеет внутреннюю нарезку в виде полукруглой канавки, куда заложены шарики 4. Посредством шариков гайка зацеплена с винтом 2, который, в свою очередь, соединен с рулевым валом 5. В верхней части картера к нему крепится корпус 6 клапана управления гидроусилителем. Управляющим элементом в клапане является золотник 7. Исполнительным механизмом гидроусилителя служит поршень — рейка 10, уплотненный в цилиндре картера с помощью поршневых колец. Рейка поршня соединена нарезкой с зубчатым сектором 9 вала 8 сошки.
Устройство рулевого механизма с встроенным гидроусилителем
Вращение рулевого вала преобразуется передачей рулевого механизма в перемещение гайки — поршня по винту. При этом зубья рейки поворачивают сектор и вал с закрепленной на нем сошкой, благодаря чему происходит поворот управляемых колес.
При работающем двигателе насос гидроусилителя подает масло под давлением в гидроусилитель, вследствие чего при совершении поворота усилитель развивает дополнительное усилие, прикладываемое к рулевому приводу. Принцип действия усилителя основан на использовании давления масла на торцы поршня — рейки, которое создает дополнительную силу, передвигающую поршень и облегчающую поворот управляемых колес. [ 1 ]
Схема поворота автомобиля
Одна из самых важных систем ТС с точки зрения безопасности движения — система рулевого управления, обеспечивающая его движение (поворот) в заданном направлении. В зависимости от конструктивных особенностей колесных ТС различают три способа поворота:
При помощи поворота управляемых колес одной, нескольких или всех осей
Созданием разности скоростей неуправляемых колес правого и левого бортов машин (поворот «погусеничному»)
Взаимным принудительным поворотом звеньев щарнирно-сочлененного ТС
Много- или двухзвенные колесные ТС (автопоезда), состоящие из колесного тягача, прицепа (прицепов) или полуприцепа (полуприцепов), осуществляют поворот при помощи управляемых колес только тягача или тягача и прицепного (полуприцепного) звена.
Наиболее широкое распространение получили схемы колесных машин с поворотными (управляемыми) колесами.
При увеличении числа пар управляемых колес уменьшается минимально возможный радиус поворота машины, т. е, улучшаются маневренные качества ТС. Однако стремление улучшить маневренность за счет применения передних и задних управляемых колес существенно усложняет конструкцию привода управления ими. Максимальный угол повороту управляемых колес обычно не превышает 35 …40°.
Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами
Рис. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами: а, б — передними; в — передними и задними; е, ж — первой и второй осей; з — всех осей
Схемы поворота колесной машины с неуправляемыми колесами
Рис. Схемы поворота колесной машины с неуправляемыми колесами:
а — с большим радиусом поворота; б — с нулевым радиусом; О — центр поворота; V1, V2 — скорости движения отстающего и забегающего бортов машины
Поворотом управляемых колес ТС водитель заставляет его передвигаться по траектории заданной кривизны в соответствии с углами поворота колес. Чем больше угол их поворота относительно продольной оси машины, тем меньше радиус поворота ТС.
Схема поворота «по-гусеничному» принципу используется сравнительно редко и в основном на специальных ТС. Примером может служить колесный тягач с неповоротными колесами и трансмиссией, обеспечивающей поворот тягача практически вокруг его геометрического центра. Такую же схему поворота имеет отечественный луноход, имеющий электромотор-колеса с формулой 8Ч8. Поворот подобных ТС осуществляется при неодинаковой скорости колес разных бортов машины. Такое управление поворотом наиболее просто обеспечить прекращением подачи вращающего момента на отстающий при повороте борт машины, скорость колес которого уменьшается вследствие их подтормаживания. Чем больше разность скоростей забегающего V2, т.е. внешнего по отношению к центру поворота (точка О), и отстающего V1(внутреннего по отношению к центру поворота) бортов машины, тем меньше радиус ее криволинейного движения. В идеальном случае, если скорости всех колес обоих бортов будут равны, но направлены в противоположные стороны (V2 = -V1), мы получим нулевой радиус поворота, т. е. машина будет поворачиваться вокруг своего геометрического центра.
Основными недостатками ТС с неуправляемыми колесами являются повышенный расход мощности на совершение поворота и больший износ шин по сравнению с автомобилями, имеющими управляемые колеса.
Шарнирносочлененные схемы поворота ТС для инженерных тягачей. Эти машины обладают хорошей маневренностью (минимальный радиус поворота у них меньше, чем у обычных автомобилей с такой же базой и лучшей приспособляемостью к неровностям дороги (из-за наличия шарниров в сцепном устройстве тягача и прицепного звена), а также обеспечивают возможность использования колес большого диаметра, что улучшает проходимость этих ТС.
Размещено на Allbest.ru
Подобные документы
Обеспечение движения автомобиля в заданном водителем направлении как основное назначение рулевого управления автомобиля Камаз-5311. Классификация рулевых механизмов. Устройство рулевого управления, принцип его работы. Техническое обслуживание и ремонт.
курсовая работа , добавлен 14.07.2016
Обзор схем и конструкций рулевых управлений автомобилей. Описание работы, регулировок и технических характеристик проектируемого узла. Кинематический, гидравлический и силовой расчет рулевого управления. Прочностные расчеты элементов рулевого управления.
курсовая работа , добавлен 25.12.2011
Основная причина пробок и лучший вариант избежать городской пробки. Особенности управления автомобилем в пробке. Перестроение для поворота в сплошном потоке. Объезд возникшего препятствия. Проезд регулируемых перекрестков. Выезд на главную дорогу.
реферат , добавлен 06.02.2008
Расчет рулевого управления автомобиля. Силовое передаточное число рулевого управления. Момент сопротивления повороту управляемых колес. Расчет конструкции рулевых механизмов. Расчет тормозных механизмов, усилителей тормозных гидроприводов автомобиля.
методичка , добавлен 19.01.2015
Анализ рабочих процессов агрегатов (сцепления, подвески), рулевого и тормозного управления автомобиля. Кинематический и прочностный расчет механизмов и деталей автомобиля Москвич-2140. Определение показателей плавности хода автомобиля (подвеска).
курсовая работа , добавлен 01.03.2011
Устройство рулевого привода грузового автомобиля. Внешний контроль технического состояния деталей привода, оценка работы ограничителей поворота. Регулировка зазоров в продольной тяге. Перечень возможных неисправностей, связанных с рулевым приводом.
курсовая работа , добавлен 22.05.2013
Общее устройство автомобиля и назначение его основных частей. Рабочий цикл двигателя, параметры его работы и устройство механизмов и систем. Агрегаты силовой передачи, ходовой части и подвески, электрооборудования, рулевого управления, тормозной системы.
реферат , добавлен 17.11.2009
Раздаточная и дополнительная коробки передач. Понижающая передача в раздаточной коробке автомобиля. Назначение и типы рулевых механизмов. Схема привода рабочей тормозной системы автомобиля ГАЗ-3307. Назначение и общее устройство прицепов-тяжеловозов.
контрольная работа , добавлен 03.03.2011
Технологический процесс ремонта рулевого управления автомобиля ВАЗ 2104. Увеличенный свободный ход рулевого колеса. Измеритель суммарного люфта рулевого управления. Стенд развал-схождение, его тестирование. Оборудование и инструмент для ремонта.
дипломная работа , добавлен 25.12.2014
Назначение и общая характеристика рулевого управления автомобиля КамАЗ–5320 и колесного трактора МТЗ–80 с гидроусилителем. Основные регулировки рулевого управления. Возможные неисправности и техническое обслуживание. Насос гидравлического усилителя.
Расчет элементов рулевого управления
Нагрузки в элементах рулевого управления и рулевого привода определяются на основании следующих двух расчетных случаев˸
По заданному расчетному усилию на рулевом колесе;
По максимальному сопротивлению повороту управляемых колес на месте.
При движении автомобиля по дорогам с неровной поверхностью или при торможении с различными коэффициентами сцепления под управляемыми колесами ряд деталей рулевого управления воспринимает динамические нагрузки, которые лимитируют прочность и надежность рулевого управления. Динамическое воздействие учитывается введением коэффициента динамичности к д = 1,5…3,0 .
Расчетное усилие на рулевом колесе для легковых автомобилей P PK = 700 H . Для определения усилия на рулевом колесе по максимальному сопротивлению повороту управляемых колес на месте 166 Рулевое управление необходимо рассчитать момент сопротивления повороту по следующей эмпирической формуле
M c = (2р о /3)VО ъ к / р ш ,
где р о — коэффициент сцепления при повороте колеса на месте ((р о = 0,9…1,0), G k — нагрузка на управляемое колесо, р ш — давление воздуха в шине.
Усилие на рулевом колесе для поворота на месте
Р ш = Mc /(u a R PK nPp y ),
где u a — угловое передаточное число.
Если вычисленное значение усилия на рулевом колесе превосходит указанное выше условное расчетное усилие, то на автомобиле требуется установка рулевого усилителя. Рулевой вал. В большинстве конструкций ᴇᴦο выполняют полым. Рулевой вал нагружается моментом
М РК = P PK R PK .
Напряжение кручения полого вала
т = M PK D/. (8.4)
Допускаемое напряжение [т] = 100 МПа.
Проверяется также угол закрутки рулевогого вала, который допускается в пределах 5…8° на один метр длины вала.
Рулевой механизм. Для механизма, включающего глобоидный червяк и ролик, определяется контактное напряжение в зацеплении
о= Px /(Fn) , (8.5)
P x — осевое усилие, воспринимаемое червяком; F — площадь контакта одного гребня ролика с червяком (сумма площадей двух сегментов, рис. 8.4), и-число гребней ролика.
Осевая сила
Px = Мрк /(r wo tgP),
Материал червяка-цианируемая сталь ЗОХ, 35Х, 40Х, ЗОХН; материал ролика- цементуемая сталь 12ХНЗА, 15ХН.
Допускаемое напряжение [а] = 7…8МПа.
Для винтореечного механизма в звене «винт-шариковая гайка» определяют условную радиальную нагрузку P 0 на один шарик
Р ш = 5P x /(mz COs -$кон) ,
где m — число рабочих витков, z — число шариков на одном витке, 8 кон — угол контакта шариков с канавками (д кон = 45 o).
Контактное напряжение, определяющее прочность шарика
где Е — модуль упругости, d m — диаметр шарика, d k — диаметр канавки, к кр — коэффициент, зависящий от
кривизны контактирующих поверхностей (к кр = 0,6…0,8).
Допускаемое напряжение [а (Ж ] = 2500..3500 МПа исходя из диаметра шарика. По ГОСТ 3722-81 должна быть определена разрушающая нагрузка, действующая на один шарик.
Расчет элементов рулевого управления — понятие и виды. Классификация и особенности категории «Расчет элементов рулевого управления» 2015, 2017-2018.
Нагрузки в элементах рулевого управления и рулевого привода определяются на основании следующих двух расчетных случаев:
По заданному расчетному усилию на рулевом колесе;
По максимальному сопротивлению повороту управляемых колес на месте.
При движении автомобиля по дорогам с неровной поверхностью или при торможении с различными коэффициентами сцепления под управляемыми колесами ряд деталей рулевого управления воспринимает динамические нагрузки, которые лимитируют прочность и надежность рулевого управления. Динамическое воздействие учитывается введением коэффициента динамичности к д = 1,5…3,0 .
Расчетное усилие на рулевом колесе для легковых автомобилей P PK = 700 H . Для определения усилия на рулевом колесе по максимальному сопротивлению повороту управляемых колес на месте 166 Рулевое управление
необходимо рассчитать момент сопротивления повороту по следующей эмпирической формуле
M c = (2р о /3)VО ъ к / р ш ,
где р о — коэффициент сцепления при повороте колеса на месте ((р о = 0,9…1,0), G k — нагрузка на управляемое колесо, р ш — давление воздуха в шине.
Усилие на рулевом колесе для поворота на месте
Р ш = Mc /(u a R PK nPp y ),
где u a — угловое передаточное число.
Если вычисленное значение усилия на рулевом колесе превосходит указанное выше условное расчетное усилие, то на автомобиле требуется установка рулевого усилителя. Рулевой вал. В большинстве конструкций его выполняют полым. Рулевой вал нагружается моментом
М РК = P PK R PK .
Напряжение кручения полого вала
т = M PK D/. (8.4)
Допускаемое напряжение [т] = 100 МПа.
Проверяется также угол закрутки рулевогого вала, который допускается в пределах 5…8° на один метр длины вала.
Рулевой механизм. Для механизма, включающего глобоидный червяк и ролик, определяется контактное напряжение в зацеплении
о= Px /(Fn) , (8.5)
P x — осевое усилие, воспринимаемое червяком; F — площадь контакта одного гребня ролика с червяком (сумма площадей двух сегментов, рис. 8.4), и-число гребней ролика.
Осевая сила
Px = Мрк /(r wo tgP),
Материал червяка-цианируемая сталь ЗОХ, 35Х, 40Х, ЗОХН; материал ролика- цементуемая сталь 12ХНЗА, 15ХН.
Допускаемое напряжение [а] = 7…8МПа.
Для винтореечного механизма в звене «винт-шариковая гайка» определяют условную радиальную нагрузку P 0 на один шарик
Р ш = 5P x /(mz COs -$кон) ,
где m — число рабочих витков, z — число шариков на одном витке, 8 кон — угол контакта шариков с канавками (д кон = 45 o).Щ /4 ,
где r ceK — радиус начальной окружности сектора, р ж — максимальное давление жидкости в усилителе, Е гц — диаметр гидроцилиндра усилителя.
Второе слагаемое применяется в том случае, если усилитель нагружает рейку и сектор, т. е. когда рулевой механизм объединен с гидроцилиндром.
Материал сектора — сталь 18ХГТ, ЗОХ, 40Х, 20ХНЗА, [а и ] = 300…400 МПа, [о сж ] = 1500 МШ.
Вал рулевой сошки. Напряжение кручения вала сошки при наличии усилителя
Эквивалентное напряжение рассчитывается по третьей теории прочности. Материал сошки: сталь 30, Рис. 8.5. Расчетная схема рулевой сошки 18ХГТ, [
Шаровой палец сошки. Напряжение изгиба
Материал: сталь 40X, 20Xh4A. Допускаемое напряжение = 300…400МПа. Напряжение смятия (давление, которое определяет износостойкость шарового пальца с диаметром шара d„,)
q = 4P oo0 /(nd0), [q] = 25…35 МПа. Рулевое управление
Напряжение среза при площади сечения шарового пальца у основания
о ср = Роо0 /F m , [о ср ] = 25. = P m J/Wk . (8.16)
Материал: сталь 30, сталь 40, 40ХГНМ. [о же ] = 300…400 МПа.
А. А. Енаев
Автомобили.
Проектирование и расчет
рулевых управлений
Учебно-методическое пособие
Братск 2004
2. НАЗНАЧЕНИЕ, ТРЕБОВАНИЯ И КЛАССИФИКАЦИЯ… 3. ВЫБОР СПОСОБА ПОВОРОТА АВТОМОБИЛЕЙ……… 4. ВЫБОР СХЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ……………. 5. РУЛЕВЫЕ МЕХАНИЗМЫ………………………………….. 5.1. Назначение, требования, классификация……………… 5.2. Оценочные параметры рулевого механизма………….. 5.3. Выбор типа рулевого механизма………………………. 5.4. Материалы, используемые для изготовления рулевых механизмов…………………………………………………… 6. РУЛЕВЫЕ ПРИВОДЫ………………………………………. 6.1. Назначение, требования, классификация……………… 6.2. Оценочные параметры рулевого привода…………….. 6.3. Выбор типа рулевого привода…………………………. 6.4. Материалы, используемые для изготовления рулевых приводов……………………………………………………… 7. УСИЛИТЕЛИ РУЛЕВОГО УПРАВЛЕНИЯ……………….. 7.1. Назначение, требования, классификация……………… 7.2. Оценочные параметры усилителя рулевого управления……………………………………………………………. 7.3. Выбор схемы компоновки усилителей………………… 7.4. Насосы усилителей……………………………………… 7.5. Материалы, используемые для изготовления усилителей насосов…………………………………………………… 8. РАСЧЕТ РУЛЕВОГО УПРАВЛЕНИЯ……………………… 8.1. Кинематический расчет рулевого привода……………. 8.2. Передаточное число рулевого управления……………. 9. СИЛОВОЙ РАСЧЕТ РУЛЕВОГО УПРАВЛЕНИЯ………… 9.1. Усилие на рулевом колесе……………………………… 9.2. Усилие, развиваемое цилиндром усилителя………….. 9.3. Усилие на колесах при торможении…………………… 9.4. Усилия на поперечной и продольной тягах…………… 10. ГИДРАВЛИЧЕСКИЙ РАСЧЕТ УСИЛИТЕЛЯ…………… 11. ПРОЧНОСТНОЙ РАСЧЕТ РУЛЕВОГО УПРАВЛЕНИЯ.. 11.1. Расчет рулевых механизмов…………………………… 11.2. Расчеты рулевых приводов…………………………… |
Проектирование и расчет рулевых управлений является одной из составных частей курсового проекта по дисциплине «Автомобили».
На первом этапе курсового проектирования необходимо выполнить тяговый расчет и исследовать эксплуатационные свойства автомобиля, используя методические указания «Автомобили. Общие положения. Тяговый расчет» и затем приступить, в соответствии с заданием, к проектированию и расчету агрегата или системы шасси автомобиля.
При проектировании и расчете рулевых управлений необходимо подобрать рекомендуемую литературу, внимательно ознакомиться с данным пособием. Последовательность работы по проектированию и расчету рулевых управлений такова:
1. Выбрать способ поворота автомобиля, схему рулевого управления, тип рулевого механизма, схему компоновки усилителя (если он необходим).
2. Выполнить кинематический расчет, силовой расчет, гидравлический расчет усилителя (если в рулевом управлении предусматривается установка усилителя).
3. Выбрать размеры деталей и выполнить прочностной расчет.
В настоящем учебно-методическом пособии подробно изложено, как выполнить все эти виды работ.
2. НАЗНАЧЕНИЕ, ТРЕБОВАНИЯ И КЛАССИФИКАЦИЯ
Рулевое управление – это совокупность устройств, служащих для поворота управляемых колес автомобиля при воздействии водителя на рулевое колесо и состоящее из рулевого механизма и привода (рис. 1).
Рулевой механизм – это часть рулевого управления от рулевого колеса до рулевой сошки, а рулевой привод включает детали от рулевой сошки до поворотной цапфы.
Рис. 1. Схема рулевого управления:
1 – рулевое колесо; 2 – рулевой вал; 3 – рулевая колонка; 4 – редуктор; 5 – рулевая сошка; 6 – продольная рулевая тяга; 7 – поворотная цапфа; 8 – рычаг поворотной цапфы; 9 – боковой рычаг; 10 – поперечная тяга
К рулевому управлению предъявляются следующие требования:
1) обеспечение высокой маневренности автотранспортных средств, при которой возможны крутые и быстрые повороты на сравнительно ограниченных площадях;
2) легкость управления, оцениваемая величиной усилия, прикладываемого к рулевому колесу.
Для легковых автомобилей без усилителя при движении это усилие составляет 50…100 Н, а с усилителем – 10…20 Н. Для грузовых автомобилей усилие на рулевом колесе регламентируется: 250…500 Н – для рулевого управления без усилителя; 120 Н – для рулевого управления с усилителем;
3) качение управляемых колес с минимальным боковым уводом и скольжением при повороте автомобиля;
4) точность следящего действия, в первую очередь кинематического, при котором любому заданному положению рулевого колеса будет соответствовать вполне определенная заранее рассчитанная кривизна поворота;
Устройство рулевого механизма — Энциклопедия по машиностроению XXL
Устройство рулевых механизмов [c.234]Устройство рулевого механизма, состоящее из червяка и бокового зубчатого сектора со спиральными зубьями, показано на рис. 63. [c.207]
Каково назначение и устройство рулевого механизма [c.167]
Устройство рулевого механизма [c.299]
Устройство рулевого механизма показано на фиг. 195. Рабочая пара рулевого механизма состоит из глобоидального червяка 10 и двойного ролика 12, находящегося в зацеплении с червяком. [c.299]
Опишите устройство рулевого механизма автомобилей ЗИЛ-130 и МАЗ-500. [c.276]
На рис. 18.5 показано устройство рулевого механизма. Основной частью его является картер /, имеющий форму цилиндра. Внутри цилиндра размещены поршень — рейка 10 с жестко закрепленной в нем гайкой 3. Гайка имеет внутреннюю нарезку в виде полукруглой канавки, куда заложены шарики 4. Посредством шариков гайка зацеплена с винтом 2, который, в свою оче- [c.230]
| Рис. 18.5. Устройство рулевого механизма с встроенным гидроусилителем |
Устройство рулевого механизма автомобиля ГАЗ-53А показано на рис. 87. [c.146]
Рассмотрим устройство рулевого механизма электропогрузчика грузоподъемностью 2 т, показанного на рис. 58. На этой машине используется рулевой механизм от автомобиля ГАЗ-51 с укороченным валом и рулевой колонкой. [c.110]
Принципиально автомобильное рулевое управление типа ЗИЛ-130, которое нашло наиболее широкое применение на погрузчиках, с гидроусилителем руля отличается от вышеописанного лишь устройством рулевого механизма, перемещающего сошку. Это отличие становится ясным, если мы вернемся к рассмотрению гидросхемы (рис. 36). [c.111]
Устройство рулевого механизма специальных погрузчиков большой грузоподъемности становится ясным, если вернуться к рассмотрению рис. 35. В данном случае гидроцилиидр двойного действия гидроусилителя устанавливается непосредственно на балке управляемого моста, а шток его соединяется с рычажной системой обойм управляемых колес. [c.112]
В автомобилях УАЗ-69 рулевой механизм имеет устройство, аналогичное устройству рулевого механизма автомобиля М-21 Волга . Картер 2 (фиг. 372, а) рулевого механизма закреплен на балке рамы так, что рулевая сошка 5 расположена внизу. [c.554]
У автомобилей ЯАЗ устройство рулевого механизма такое же, как и у автомобиля МАЗ-200. [c.558]
Гидросистема состоит из насоса / типа НШ-46, насоса 2 типа НШ-10, масляного бака 5, фильтра 4, распределительного устройства 13, механизма поворота 12 отвала с гидродвигателем, гидроцилиндров 5—7и5—//, рулевого механизма 8 с гидроусилителем в сборе, смонтированного в одном корпусе с редуктором рулевого управления, трубопроводов из стальных бесшовных труб и рукавов высокого давления. [c.172]
Гидропривод с объемным управлением скоростью гидродвигателя широко применяется в различных отраслях машиностроения он используется в металлорежущих станках, на судах в качестве привода вращения лебедок, кранов, для управления рулевыми механизмами, регулирования скорости хода судна, в подъемно-транспортных и дорожно-строительных машинах, тракторах, автомобилях, сельскохозяйственных машинах и многих других механических устройствах, в которых требуется бесступенчатое регулирование скорости при больших передаваемых усилиях. [c.495]
На крупных пассажирских автобусах и на всех других видах транспорта все шире применяется рулевое управление с усилением. Было разработано много различных конструкций, которые приводятся в движение гидравлическим насосом. Система состоит из насоса, резервуара, распределительного и перепускного клапанов и собственно рулевого управления, включающего обычный рулевой механизм с силовым цилиндром двойного действия и соответствующими клапанами. В типичных системах перемещение силового цилиндра регулируется распределительным и обратным клапанами, установленными на каждом конце цилиндра двойного действия. В нейтральной позиции все клапаны открыты. При повороте руля клапаны действуют дифференцированно. С началом движения один распределительный клапан полностью открывается, а другой — полностью закрывается. Таким образом, жидкость, которая нагнетается насосом, направляется в один конец цилиндра, тогда как положением соответствующего обратного клапана регулируется скорость выпуска жидкости, а следовательно, и давление в системе. Возможна такая система, которая будет сама принимать нейтральное положение сразу же после снятия момента, приложенного к рулевому колесу, или иметь люфт, обеспечивающий любую заданную чувствительность. Во всех случаях механизм усиления проектируется в комплексе с надежными устройствами, позволяющими в случае повреждения гидравлической системы возвратиться к обычному управлению вручную. [c.342]
Для повышения эксплуатационной надежности агрегатов ходовых устройств кранов, а также для обеспечения безопасности движения их необходимо периодически осматривать, смазывать и проводить крепежно-регули-ровочные работы. При ежесменном техническом обслуживании необходимо проверять действие муфты сцепления, ножного и ручного тормозов состояние шин и давление воздуха в них рессоры, амортизаторы, крепление гаек и дисков колес, гусеничных лент и их натяжение состояние и надежность крепления рулевых тяг, поворотных рычагов, шаровых пальцев смазку подшипников педали сцепления и ее свободный ход наличие масла в картере коробки передач и действие рычага управления коробкой передач смазку карданных шарниров, опорных подшипников и шлицев карданного вала крепление полуосей и шпилек их фланцев наличие масла в картерах мостов смазку шкворней поворотных цапф, шаровых пальцев, тяг и втулок рулевого управления смазку в картере рулевого механизма свободный ход рулевого колеса крепление стремянок, хомутиков, пальцев рессор, корпусов и соединений тяг амортизаторов крепление трубопроводов и шлангов, тормозного крана, тормозных камер, тяг, кронштейна колодок и барабана или дисков) ручного тормоза. Необходимо также спускать отстой из водомаслоотделителя и конденсат из воздушного баллона и очищать воздушный фильтр компрессора проверить величину свободного хода педали ножного тормоза и рычага ручного тормоза, а также регулировать зазоры между колодками и тормозными барабанами. При периодическом техническом обслуживании кроме работ, предусмотренных ежесменным обслуживанием, вы- [c.190]
Универсальный рисунок протектора 175 Управляемость 11, 160, 176 Управляемые колеса 205 Упругое устройство подвески 187 Уравновешенность рулевого механизма 225 [c.302]
На валу червяка расположено распределительное устройство гидроусилителя рулевого управления. Корпус /7 (см. рис. 96) распределительного устройства прикреплен болтами к фланцу картера рулевого механизма. С другой стороны к корпусу 17 прикреплена болтами крышка 26, в которой установлен дополнительный роликовый подшипник 23 вала и сальник. При помощи гайки 21 между двумя упорными подшипниками 20 на валу закреплен золотник 16 с двумя подвижными упорными кольцами 19 н 12. [c.128]
При использовании системы в качестве гидравлического усилителя крутящего момента на рулевом колесе жидкость от насоса 6 (см. рис. 37) через кран 10 передается к распределительному устройству, установленному на картере рулевого механизма 1. В распределительном устройстве имеется золотник, который соединен трубопроводами с насосом 6 и гидроцилиндром 4. Принцип работы устройства понятен из схем I, И и ///. [c.123]
Гидроусилитель автобуса ЛиАЗ-677 состоит из силового цилиндра, закрепленного на раме шаровым соединением, распределительного устройства, установленного на картере рулевого механизма и насоса, расположенного на двигателе. [c.209]
Рулевой механизм показан на рис. 117. Его устройство включает рулевое колесо, рулевой вал, картер рулевого механизма, глобоидальный червяк, ролик, вал рулевой сошки, рулевую сошку и др. [c.211]
Противоугонное устройство срабатывает в определенном положении механизма при вынутом из замка ключе. При этом запорный стержень 5 под действием пружины 7 входит в паз вала рулевого механизма, обеспечивая его запирание. Выступ 6 обеспечивает правильную ориентацию замка-вычислителя при его установке. [c.251]
| Рис. 51. Редуктор рулевого механизма автогрейдера ДЗ-98 а — устройство, 6 — схема работы гидрораспределителя / — сошка, 2, 5. 9, 70 — подшипники, 3 — крышка, 4—упорная шайба, 6 — червяк, 7 — червячный сектор, 8 — картер, И — пружина, плунжер, /5 —корпус, /4 — золотник, /о — пробка /…/// —этапы работы |
Гидросистемы следящего действия применяют для привода рулевых механизмов разнообразного конструктивного исполнения, одно- или двухцилиндровых, для шарнирно сочлененных рам и для рулевых трапеций. Но во всех различных устройствах обязательно применение следящих тяг или механизмов обратной связи. [c.181]
Рассмотрим устройство рулевого механизма типа червяк—трех-гребневый ролик (рис. 111). Глобоидальный червяк 5, установленный на конце рулевого вала, вращается в двух конических роликовых подшипниках, расположенных в картере 4 рулевого механизма. В зацепление с червяком входит трехгребневый ролик 7, вращающийся на двух игольчатых подшипниках, установленных в вилке вала 8 сошки. Опорами вала сошки служат бронзовые втулки, запрессованные в картер. На правом конце вала имеются мелкие шлицы, на которые установлена сама сошка, удерживаемая от осевого смещения гайкой. Для предотвращения вытекания масла вдоль вала сошки установлен резиновый сальник. [c.235]
Тогда же Белорусский автомобильный завод в г. Жодино начал выпускать 27-тонные автомобили-самосвалы БелАЗ-540 (рис. 71, б) и 40-тонные автомобили-самосвалы БелАЗ-548. Предназначенные для перевозки скальных пород, грунта и полезных ископаемых в карьерах и на крупных строительствах, они снабжены двенадцатицилиндровыми дизельными двигателями мощностью соответственно 360—375 и 500—520 л. с., кузовами ковшового типа с защитными козырьками над кабинами водителей, гидромеханическими трансмиссиями, пневмогидравлической подвеской передних осей и задних мостов, гидравлическими усилителями рулевых механизмов и сложными тормозными системами с ленточными и колодочными тормозами. Одноместные кабины их с тепловой и звуковой изоляцией оборудованы отопительными и вентиляционными устройствами. При работе машин в районах с жарким климатом отопительные устройства заменяются установками для кондиционирования воздуха. [c.270]
Особое устройство имеет рулевой механизм на тракторе Форд-Фергюсон (фиг. 37). Поворот цапф передних колёс осуществляется здесь посредством конической шестерни и двух конических секторов, связанных с поворотными цапфами через рулевые тяги. Разница в углах поворота внутреннего и внешнего [c.341]
Значительное увеличение пассажировместимости воздушных судов привело прежде всего к существенному усложнению всех систем самолета, что значительно затруднило решение вопросов обеспечения надежности и потребовало поиска и применения новых конструкторских решений для достижения этого важнейшего показателя. В качестве примера рассмотрим системы управления самолетами Ил-62 и Ил-86. На рис. 2, а, б представлены пришщпиальные схемы управления. Важнейшими органами управления самолетом Ил-62 являются 1 — штурвал управления триммером, 2 — рулевая машина автопилота, 3 — электромеханизм управления стабилизатором, 4 — винтовой механизм, 5 — винтовой механизм триммирова-ния, 6 — электропривод триммирования, 7 — пружинная стойка, 8 -электромеханизм подключения загрузочного устройства, 9 — механизм триммерного эффекта, 10 — загрузочное устройство, 11 — автономная рулевая машина АРМ-62. [c.36]
ГЛУЗ-6,3-20 ПМС-1,6-20 4 Очистка сложных деталей (печатные платы, волноводы, зубчатые передачи), узлов (челноки швейных машин, передаточные механизмы и редукторы электродвигателей, например редукторы сервомоторов бортовых решающих устройств самолетов, различные подшипники) и изделий (автоматические рулевые механизмы, потенциометры, смонтированные электрические счетчики, обычные и электрические часы). Очистка концов трубопроводов от окалины после приварки штуцеров. Очистка надфилей и напильников от ржавчины и окалины [c.438]
Использование устройств подобного рода позволяет наиболее удобно расположить рулевой механизм огно- [c.282]
В рассмотренной схеме усилителя рулевого управления распределитель и силовой цилиндр представляют собдй отдельные устройства, размещенные раздельно один от другого и от рулевого механизма. По такой схеме выполнены усилители на автомобилях ГАЗ-66, КАЗ-608. Иногда распределитель соединяют вместе с силовым цилиндром и устанавливают отдельно от рулевого механизма (автомобиль МАЗ-500). В автомобиле ЗИЛ-130 силовой цилиндр, распределитель и рулевой механизм объединены в один блок. [c.243]
Конструкции рулевых управлений повышенной безопасности различны. В рулевых маханизмах автомобилей Мо-сквич-2140>> поглощение энергии удара осуществляется вследствие трения в рулевом вале и рулевой колонке, которые выполняются телескопическими, а рулевое колесо в таком случае перемещается незначительно внутрь салона. На автомобиле ГАЗ-3102 Волга энергопогло-щающим устройством служит резиновая муфта, соединяющая две части рулевого вала. Иногда энергопоглощающие элементы рулевых механизмов [c.212]
I — машинадля мойки деталей,2 — стеллажи, — стенд для независимой подвески, — стенд для ведущих мостов, J — стенд для рулевых механизмов, б — стенд для редукторов ведущих мостов, 7 — верстаки, 8 — подставки под оборудование, 9 — станок сверлильный, 0 — станок для шлифовки клапанных седел, I — станок для шлифовки клапанов, 12 — устройство для наклейки фрикционных накладок, 13 — установка для электронагрева поршней, 4 — стенд для двигателей, 15 — стенд для сцеплений, 16 — стенд для коробки передач, 17 — станок точильный, 18 — стеллаж для колес, 9 — стенд для демонтажа шин, 20 — ванна для камер, 21 — станок для балансировки колес, 22 — пресс гидравлический, 23 — ванна для электролита, 24 — приспособление для разливки кислоты, 25 — шкаф зарядный, 26 — зарядное устройство [c.21]
Рулевой механизм (рис. 118) по устройству несколько отли-чаетс.я от рулевого механизма автомобиля ГАЗ-51 А. Вал рулевого колеса состоит из верхнего рулевого и промежуточного валов, соединенных между собой и с валом рулевого механизма при помощи карданных шарниров.. [c.213]
Стенд предназначен для сборки и проверки рулевых механизмов автомобилей Москвич , ГАЗ-51, ЗИЛ-164А, МАЗ-200, а также и других моделей автомобилей при оснащении дополнительными переходными кронштейнами и втулками, В конструкции данного стенда (рис. 81) имеется нагрузочное устройство 6, создающее условия проверки рулевого механизма, приближенные к условиям его эксплуатации на автомобиле. [c.120]
Нагрузочное устройство представляет собой сектор, заполненный маслом и разделенный подвижной перегородкой на дзе части. При вращении нагрузочного устройства перегородка перемещается внутри сектора и масло при этом перетекает через калиброванное отверстие в перегородке из одной полости в другую. С изменением проходного сечения калиброванного отверстия меняется и величина нагрузки на рулевой механизм. Проверяемый рулевой механизм крепится на стенде при помощи двух откидных прижимов 2, находящихся на основании 1. Картер рулевого механизма крепится к сменному кронштейну 7. Вал нагрузочного устройства соединяется с валом сощки. испытываемого механизма при помо-. щи переходной втулки 5. [c.121]
Своевременный ремонт рулевого управления, замена рулевой рейки и ГУР
Под рулевым управлением подразумевают комплекс механизмов, отвечающих за связь между рулевым колесом и колесами авто. Рулевое управление относят к самым важным системам автомобиля.
Под рулевым управлением подразумевают комплекс механизмов, отвечающих за связь между рулевым колесом и колесами авто. Рулевое управление относят к самым важным системам автомобиля.
В него входят:
- руль;
- редуктор (силовой механизм, передающий вращение руля) или рулевая рейка;
- шланги высокого давления;
- насос ГУР.
Схема рулевого управления
Выход из строя любого из элементов рулевого управления может иметь плачевные последствия, поэтому регулярная диагностика и устранение выявленных неисправностей являются обязательными для безопасного управления автомобилем.
Поломки рулевого управления, как и тормозной системы, относят к наиболее серьезным неисправностям. После повсеместного внедрения на современных авто реечного рулевого механизма список возможных поломок рулевого управления стал намного короче.
Наиболее распространенными поломками рулевого управления являются:
- выход из строя подшипника рулевого вала;
- износ передающей пары;
- износ или разрушение шарниров наконечников рулевых тяг;
- разгерметизация рулевого механизма.
Чаще всего встречается выход из строя шарового шарнира наконечника рулевой тяги.
Основные неисправности ГУР:
- проскальзывает ремень привода насоса;
- повреждены шланги, либо ослаблено их крепление;
- в бачке уровень рабочей жидкости ниже нормы;
- выработка подшипника вала насоса;
- загрязнение клапана насоса, фильтрующего элемента и т.д.
Гидроусилитель руля
Распространенные неисправности гидроусилителя руля и их признаки
- Изношена роторная пара либо низкий уровень рабочей жидкости в бачке (зудящий звук при повороте руля).
- Разрушено кольцо, расположенной в насосе плавающей шайбы (при повороте руля нужно прикладывать усилия).
- Подвисание расходного клапана («тугой» руль, при высокой скорости признак исчезает).
- Задиры на привалочных плоскостях и роторе («тугой» руль, при высокой скорости признак исчезает, но появляется воющий звук).
- Проскальзывает ремень привода («тугой» руль).
К основным причинам поломок рулевого управления относят:
- Плохое качество дорожного покрытия.
- Неправильный уход (нерегулярное ТО, использование низкокачественных рабочих жидкостей и т.п.).
- Износ рулевого управления.
- Неквалифицированные работы по ремонту и ТО рулевого управления.
- Колеса имеют характеристики, отличные от рекомендованных (низкое и высокое давление в шинах и их износ, нет балансировки колес и т.п.).
Неисправности рулевого управления можно установить по таким признакам:
- затруднено вращение рулевого колеса;
- подтекают рабочие жидкости;
- шумы в рулевом управлении и ГУР;
- биение рулевого колеса;
- рулевое колесо имеет значительный люфт (холостой ход).
Утечки рабочей жидкости в рулевом управлении трудно увидеть, т.к. нет луж, свойственных утечкам в системе охлаждения. Подтекание устанавливается по «запотеванию» неисправного элемента.
Ремонт рулевого управления
Многие автолюбители считают, что им незачем знать, необходимость в каком ремонте рулевого управления может возникнуть. Как минимум, эти знания понадобятся, чтобы понимать, с какими затратами времени и средств может будет связан предстоящий ремонт.
Виды ремонта рулевого управления:
- Ремонт распределителя. Связан с заменой верхнего и внутреннего сальников, уплотнительных колец, шлифовкой вала, гильзованием корпуса и т.п.
- Ремонт ГУР. Обычно проводится с использованием ремкомплекта, включающего уплотнительные кольца распредвала и поршня, опорных втулок, сальников высокого давления, вставок для поджимки вала. Возможна также шлифовка вала.
- Ремонт рулевой рейки с восстановлением вала. Он включает указанные выше операции и восстановление вала, в том числе его наращивание, хромирование и шлифовку.
- Капремонт рулевой рейки. Включает перечисленные выше операции и замену поперечного вала, распределителя, крепежей боковой поджимки, рулевых тяг, трубок высокого давления.
К кому обратиться для ремонта?
Диагностика и ремонт рулевого управления
Проведенные своевременно диагностика и ремонт рулевого управления позволяют минимизировать риски аварийный ситуаций в процессе движения авто, а также избавят вас в будущем от дорогостоящего ремонта. Впрочем, нужно помнить, что данный вид ремонта относят к сложным, для его выполнения необходимо специальное оборудование, профессиональные инструменты, опыт. Если вы не обладаете этими качествами, обязательно обратитесь в специализированный автосервис, который предоставляет гарантию на проведенные работы.
Автомобиль УАЗ-469 — характеристики, устройство, ремонт
Автомобиль УАЗ-469 — характеристики, устройство, ремонтК сожалению, запрашиваемая вами страница не найдена. Почему?
Вероятные варианты:
Cсылка, по которой вы пришли — невернаНеверно указан путь или название страницы в адресной строке
Страница была удалена или переименована, но ещё существует в индексе поисковиков (закладках браузера)
- Техническая характеристика УАЗ-469, УАЗ-469Б Характерситики двигателя (41416, 414) УАЗ-469, УАЗ-469Б
- Органы управления УАЗ-469
- Подготовка к работе УАЗ-469
- Подвеска двигателя УАЗ-469
- Кривошипно-шатунный механизм двигателя УАЗ-469
- Газораспределительный механизм двигателя УАЗ-469
- Система смазки УАЗ-469
- Система вентиляции картера двигателя УАЗ-469
- Система питания двигателя УАЗ-469 Карбюратор К-129В
- Система выпуска газов двигателя УАЗ-469
- Система охлаждения двигателя УАЗ-469
- Предпусковой подогреватель двигателя УАЗ-469
- Неисправности двигателя УАЗ-469
- Сцепление УАЗ-469 Привод управления сцеплением УАЗ-469
- Коробка передач УАЗ-469 Неисправности коробки передач, механизма переключения УАЗ-469
- Раздаточная коробка УАЗ-469 Возможные неисправности раздаточной коробки УАЗ-469
- Карданная передача УАЗ-469 Неисправности карданного вала УАЗ-469
- Передний ведущий мост УАЗ-469 Техническое обслуживание переднего моста УАЗ-469
- Рама УАЗ-469
- Подвеска УАЗ-469 Амортизатор УАЗ-469
- Рулевое управление УАЗ-469
- Тормоза УАЗ-469 Техническое обслуживание тормозов УАЗ-469
- Электрика УАЗ-469
- Генератор УАЗ-469
- Регулятор напряжения РР132
- Аккумуляторная батарея УАЗ-469
- Система зажигания УАЗ-469 Возможные неисправности приборов системы зажигания УАЗ-469
- Стартер УАЗ-469
- Система освещения, световой и звуковой сигнализации УАЗ-469 Звуковой сигнал УАЗ-469
- Контрольно-измерительные приборы УАЗ-469
- Инструменты и принадлежности УАЗ-469
- Кузов УАЗ-469 Тент УАЗ-469
- Маркировка УАЗ-469
- Техническое обслуживание УАЗ-469
Первое техническое обслуживание (ТО-1) УАЗ-469
Смазка автомобиля УАЗ-469 - Смазочные материалы УАЗ-469 и УАЗ-469Б
Двигатель УАЗ-469, УАЗ-469Б
Трансмиссия УАЗ-469, УАЗ-469Б
Ходовая часть, подвеска, системы управления УАЗ-469, УАЗ-469Б
Электрооборудование УАЗ-469, УАЗ-469Б
Кузов УАЗ-469, УАЗ-469Б
Регулировочные данные УАЗ-469, УАЗ-469Б
Заправочная вместимость УАЗ-469, УАЗ-469Б
Техническое обслуживание системы питания двигателя УАЗ-469
Возможные неисправности сцепления УАЗ-469
Задний мост УАЗ-469
Задний мост УАЗ-469Б
Возможные неисправности заднего моста УАЗ-469Б
Колеса и шины УАЗ-469
Возможные неисправности колес, шин и ступиц УАЗ-469
Возможные неисправности рабочих тормозов УАЗ-469
Стояночный тормоз УАЗ-469
Вентиляция кузова УАЗ-469
Установка санитарных носилок в кузове УАЗ-469
Рулевой механизм на судне — работа, применение и его типы, конструкция
Что такое рулевой механизм?
Рулевой механизм, — это оборудование, предоставляемое на судах для поворота судна с левого борта (с левой стороны) на правый борт (с правой стороны) или с правого борта на левый, когда судно находится в движении во время плавания.
Примечание: — Работает только тогда, когда корабль находится в движении, и не работает, когда корабль неподвижен.
Задайте свои вопросы
Вместимость
Мощность рулевого механизма должна быть такой, чтобы руль мог поворачиваться с 35 градусов по левому борту на 35 градусов по правому борту и наоборот, и он должен был иметь возможность поворачивать руль с 30 ° с одной стороны на 35 градусов с другой стороны в течение 28 секунд.
Рулевой механизм работает только при движении корабля.
Основные компоненты системы рулевого управления
В система рулевого управления рулевой механизм обеспечивает перемещение руля направления в ответ на сигнал с мостика.
3 основные части рулевого механизма
а) аппаратура управления
б) энергоблок
в) блок трансмиссии на баллер.
a) управляющее оборудование передает сигнал о желаемом угле поворота руля из рулевого управления, где он принимается, чтобы активировать силовой агрегат и систему трансмиссии, пока не будет достигнут желаемый угол.
b) силовой агрегат обеспечивает усилие, когда это необходимо, и с немедленным усилием для перемещения руля направления на желаемый угол.
c) система трансмиссии (рулевой механизм) — средство, с помощью которого осуществляется движение руля направления.
Управляющее оборудованиеможет представлять собой гидравлическое управляющее оборудование (известное как телемотор) или электрическое электронное управляющее оборудование.
Какие типы рулевых устройств используются на корабле?
1) Электрогидравлическая система a) Система поршневого типа (2 или 4 поршня) b) Система лопастного типа
2) Вся электрическая система а) Система Уорда Леонарда б) Однодвигательная система
Типы гидравлических трансмиссий или рулевых механизмов: —Бывает двух типов: —
a) Тип поршня (может быть 2 или 4)
b) Поворотная лопасть типа
Здесь мы обсудим систему рулевого механизма типа Ram
Рабочий: —
Если масло закачивается в левый (левый) гидроцилиндр и забирается из правого гидроцилиндра, гидроцилиндры будут скользить слева направо.Через поперечину RAM рычаг румпеля будет перемещаться по правому борту, а руль направления по левому борту.
Мгновенная перекачка прекращается, движение рычага румпеля прекращается, и руль направления гидравлически блокируется в этом новом положении, так как масло теперь не имеет возможности протекать и полностью заблокировано в цилиндрах гидроцилиндра и наоборот.
Рулевой механизм с двумя цилиндрамиНа эскизе показано расположение 2-х поршневого рулевого механизма.
При повороте рулевого колеса сигнал поступает на приемник телемотора через передатчик телемотора, который управляет охотничьим снаряжением.
Охотничье снаряжение inturn Перемещает рабочий шпиндель насоса с регулируемой подачей (типа Hele Shaw или с наклонной шайбой) из нейтрального положения.
Таким образом насос начинает перекачивать в один гидроцилиндр, а из другого гидроцилиндра масло всасывается в насос.
Таким образом, RAM начинает движение, и это движение передается через румпель на баллер руля и руль направления.
Перемещение руля направления приводит к перемещению охотничьего снаряжения таким образом, что как только желаемый угол руля достигается, рабочий шпиндель насоса возвращается в нейтральное положение, и никакая дальнейшая накачка и руль направления не остается в желаемом угловом положении.
Рулевой механизм с 4 цилиндрамиНа схеме выше показано расположение рулевого механизма с четырьмя гидроцилиндрами.
рабочая
Когда сигнал от телемоторной системы приводит в действие охотничий механизм, он приводит насосы с регулируемой подачей в положение нагнетания, таким образом, масло течет к двум номерам, расположенным по диагонали, противоположным цилиндрам (скажем, 1 и 4) из других двух цилиндров (два и три), в которые всасывается масло. насос.
При этом руль направления поворачивается по часовой стрелке.Если из-за действия телемоторной системы охотничья шестерня перемещается в другом направлении, то масло будет подаваться в цилиндры 2 и 3, а из 1 и 4 масло потечет в насос, и, таким образом, руль направления повернется против часовой стрелки.
Поворот руля приведет к перемещению охотничьего снаряжения таким образом, чтобы при достижении желаемого положения рычаг управления насосом переводил насос в нейтральное положение, и желаемое положение руля направления сохранялось.
Каждый баллон оснащен запорным клапаном баллона.Есть два перепускных клапана и предохранительный клапан, соединяющие цилиндры 1 и 2 и цилиндры 3 и 4.
В случае избыточного давления в цилиндре (которое может возникнуть из-за удара руля направления)
Подпружиненный перепускной клапан открывается автоматически, и подключенный цилиндр переключается на байпас.
Резервуар для пополнения предусмотрен в системе, чтобы восполнить любую потерю гидравлического масла.
Объясните следующее в системе рулевого механизма с двумя цилиндрами .A) запорный клапан : — на каждом цилиндре имеются запорные клапаны и номер поворотной лопасти, которые в закрытом состоянии будут удерживать руль направления, удерживая масло в камерах. Насосы также оснащены запорными клапанами, чтобы насос можно полностью отключить от контура и снять для обслуживания, в то время как рулевое управление будет продолжено с другими насосами.
B) перепускной клапан : -. Перепускные клапаны обычно закрыты, но могут быть открыты на двухцилиндровом редукторе для использования аварийного рулевого управления.Одну пару цилиндров можно обойти на четырех цилиндрах — шестернях, в то время как другая пара цилиндров обеспечивает аварийное рулевое управление с пониженным крутящим моментом.
C) предохранительные клапаны : — предохранительные клапаны предусмотрены между дополнительной парой цилиндров или камерами лопастных шестерен. Они настроены на подъем при давлении выше нормального максимума.
D) Амортизирующие клапаны установлены в трубопроводе системы между цилиндрами для предотвращения чрезмерной ударной нагрузки от руля направления из-за передачи сильных волн на гидравлическую систему
Какие устройства безопасности для системы рулевого управления?
- Снаряжение охотничье
- Буферная пружина
- Ограничитель регулировки угла (Концевой выключатель передаточного положения)
- Клапан двойной амортизации
- Клапан сбросный
- Сигнализация уровня в баке (масло)
- Аварийный сигнал перегрузки
Как работает судовой рулевой механизм?
«Управляющая сила» для поворота запускается с колеса на штурвале, которое достигает системы рулевого управления.Система рулевого управления создает крутящую силу определенного масштаба, которая затем, в свою очередь, передается на рулевой механизм, который вращает рулевое колесо.
Что такое аварийное рулевое управление?
Аварийная система рулевого управления, как следует из названия, представляет собой систему, которая используется при выходе из строя главной системы рулевого управления судна.
Может возникнуть ситуация, при которой пульт дистанционного управления может не работать, и это может быть внезапная потеря рулевого управления с мостика. Это может произойти из-за внезапного отключения электроэнергии, любого электрического сбоя в системе или системе управления, которая включает неисправный телемотор или серводвигатель, который используется для передачи сигнала от моста к рулевому управлению.
Аварийная система рулевого управления используется для управления рулевым управлением судна в такой аварийной ситуации путем измерения вручную из помещения рулевого механизма.
В чем разница между типом RAM и пластинчатым рулевым управлением?
Как вы называете того, кто управляет кораблем?
Рулевой или Рулевой — это лицо, которое управляет кораблем, парусной лодкой, подводной лодкой, другим типом морского судна или космическим кораблем.
Почему угол рулевого управления при испытании рулевого управления составляет от 35 до 30 градусов?
Это потому, что
Точка, в которой она достигнута, может быть точно определена, если она пересекает 30 градусов.
И поскольку охотничье снаряжение сводит ход насоса к нулю, движение руля направления постепенно замедляется по мере приближения к 35 градусам.
Википедия
Рулевой механизм — Рулевой механизм
Суда, по крайней мере, с 1950-х годов, были оснащены автоматическим рулевым управлением, что делало рулевых ненужными для глубоководных переходов. После установки необходимого курса автоматическое рулевое управление сохраняет направление; исправление любых отклонений из-за погоды.Автоматическое рулевое управление стабильно, без ухудшения характеристик, которое произошло в тяжелую погоду с ручным рулевым управлением, когда сменили человека-рулевого. Некоторые проблемы возникали с ранними версиями автоматических систем рулевого управления при переходе с автоматического на ручное рулевое управление и наоборот. Неправильное переключение было обвинено по крайней мере в одном столкновении (переключение касалось гидравлической телемоторной системы, байпас для которой не был правильно настроен).
Автоматическое рулевое управление усовершенствовано, и теперь электрическое управление рулевым механизмом стало нормой, при этом гидравлический телемотор, если он вообще установлен, используется только в экстренных случаях.Однако гидравлические телемоторы, если они установлены, следует регулярно проверять, устраняя любые утечки и доливая масло.
Подшипник балки руля
Подшипник держателя руля (рисунок 9.1) принимает вес руля на упорную поверхность, смазываемую консистентной смазкой. Балка руля находится у цапфы внизу, также смазывается консистентной смазкой.
Опора подшипника обеспечивается рамой под рулевым механизмом. В области под несущей опорой имеется более толстая обшивка настила, и последняя может опираться на стальные подушки.Основание несущей опоры расположено боковыми подушками, приваренными к палубе. Держатель может быть из механита с упорным кольцом и втулкой из пушечной бронзы. Компоненты несущего подшипника разделяются по мере необходимости для снятия или замены. Винтовые (ручные) лубрикаторы могут быть установлены, но автоматические лубрикаторы являются обычным явлением. Смазка, используемая для смазки, водостойкая (кальциевая мыльная основа с графитом).
Румпель (рисунок 9.1) соединен с балкой руля и изготовлен из кованой или литой стали с одним (или двумя для четырех цилиндров) рычагом, гладко обработанным для скольжения в виде поворотного блока, предназначенного для преобразования линейного движения цилиндров. к вращательному движению рычагов управления и баллера руля.Это конкретное устройство, известное как ползун Рапсона, используется для многих, но не для всех, зубчатых колес поршневого типа. Ползунки представляют собой цельные стальные поковки с шлифованной рабочей поверхностью. Каждая пара ползунов Rapson скреплена болтами, соединенные концы просверлены
Крейцкопф
Культиватор
♦ Разделить на $. Для облегчения удаления
Балочные соединительные цилиндры
Зазор для износа руля направления
Двойная пробка для смазки _____ поз.
Каналы для смазки
Рисунок 9.2 Держатель с конической пробкой для смазки седла _____ поз.
- сальник
конус основания каналов для смазки, закрепленный на палубе или на судне
Рисунок 9.2 Держатель с коническим седлом по вертикали и втулкой, образующей верхнюю и нижнюю опоры для выступающих втулок на поворотном блоке. Тапочки крейцкопфа, прикрученные к торцу центральной части цилиндров, скользят по обработанным поверхностям направляющей балки. Направляющие балки также служат для фиксации каждой пары цилиндров против их расталкивания под действием гидравлического давления.Цилиндры имеют крепкие ножки, прикрепленные болтами к табуретам, на которых установлена шестерня.
Износ опорного подшипника контролируется путем периодического измерения отмеченного зазора. Исходный зазор обычно составляет около 20 мм.
Альтернативный тип несущей опоры с коническим седлом (рисунок 9.2) имеет то преимущество, что седло и боковая стенка будут размещать баллер руля направления. Угол конического гнезда небольшой, чтобы предотвратить заедание.
Износ подшипников происходит с течением времени, и в конструкции рулевого механизма делается поправка (см. Рисунок 9.1) при небольшом перепаде баллера руля по высоте. Этот допуск на износ периодически проверяется и при необходимости восстанавливается. Подъем руля и баллера в плохую погоду можно ограничить с помощью упоров для прыжков между верхней поверхностью руля и рамой выноса.
Обычный предел движения руля направления составляет 35 ° в каждую сторону от среднего положения, и это контролируется телемотором. Внешние упоры руля направления, если они установлены, ограничивают движение, скажем, до 39 ° от среднего положения. Сам рулевой механизм также накладывает ограничения на движение руля, но при потере гидравлического масла и остановке судна в плохую погоду может быть серьезное повреждение механизма.Телемоторное управление накладывает обычный предел в 35 °.
Гидравлический рулевой механизм поршневого типа
На рис. 9.3 показано устройство двухцилиндрового рулевого механизма с насосами переменной подачи. Такие шестерни могут иметь крутящий момент 120-650 кНм.
Цилиндры этого механизма изготовлены из литой стали, но гидроцилиндры состоят из цельной стальной поковки со встроенными штифтами для передачи движения через детали трески.
- Рисунок 9.3 Электрогидравлический рулевой привод с двумя цилиндрами.
1. Цилиндры
2. Бараны
3. Штучная треска
4. Культиватор
5. Двигатели М1
M2 Насосы переменной производительности
LV Запорный клапан
PU1, PU2 Блоки питания Al, A2 Вспомогательные насосы T Резервуар F10 Фильтр SC Серворегуляторы CO Переключающие клапаны PC2Q Клапаны ограничения давления CV Обратные клапаны
P1, P2 Запорные клапаны LV Запорные клапаны BP Перепускной клапан RV Предохранительный клапан HP Запорные клапаны ручного насоса WP Обратные клапаны, которые скользят в губках вилочного конца румпеля.Плунжеры обработаны и отшлифованы для скольжения во втулках шейки пушки и шевронных уплотнениях цилиндров.
Гидравлическое давление подается в один или другой цилиндр с помощью однонаправленных насосов переменной производительности с электрическим приводом, работающих с постоянной скоростью. Насосы могут быть радиально-поршневыми Hele-Shaw или развитием аксиально-поршневых V.S.G. насос. Ход поршней насоса в обоих типах насосов может быть изменен, а поток масла к насосу и от него может быть изменен.Когда шток насоса находится в среднем положении, поток масла отсутствует.
Насосы с регулируемой подачей
Насосы с регулируемой подачей могут работать непрерывно в одном направлении, но имеют возможность плавно изменять напор от нуля до максимума в любом направлении. Принцип действия основан на изменении хода поршней насоса в радиальных или осевых цилиндрах с помощью плавающего кольца или наклонной шайбы, соответственно, для изменения количества вытесняемого масла. Когда насос начинает подачу, гидравлическая система испытывает очень небольшой удар, поскольку ход поршня постепенно увеличивается от нуля.При небольшом движении руля ход поршня мал; ход становится полным только при больших движениях руля направления. В конце движения руля напор насоса сужается; она не прекращается внезапно, как в насосах с постоянной подачей, которые имеют управление клапанами.
Радиально-цилиндровый (или Хеле-Шоу) насос
Насос (рисунок 9.4a) состоит из корпуса A, к которому прикреплены две крышки, крышка вала B и крышка соединения трубопровода C. Эта последняя крышка несет трубку D (или центральный клапан), которая имеет отверстия E и F. образуя соединения между цилиндрами и ответвлениями G и H.Корпус цилиндра J приводится в движение валом K и вращается на трубе D, поддерживаемой с обоих концов шарикоподшипниками T.
Поршни L установлены в радиальных цилиндрах, и через внешний конец каждого поршня имеется поршневой палец M, который прикрепляет тапочки N к поршню. Башмаки могут свободно колебаться на своих поршневых пальцах и вставляться в направляющие в круглом плавающем кольце O. Это кольцо может свободно вращаться, поскольку оно установлено на шарикоподшипниках P, которые размещены в направляющих блоках R.Последние опираются на дорожки, образованные на крышках B и C, и управляются шпинделями S, которые проходят через корпус насоса A. Максимальный ход насоса ограничивается концами направляющего блока, контактирующими с корпусом. Дальнейшее ограничение хода насоса осуществляется извне.
На рис. 9.4b показаны сечения D-образной трубки, корпуса цилиндра, поршней и башмаков под прямым углом к оси. XY — это линия, вдоль которой происходят вариации хода. Стрелка указывает направление вращения.
Если плавающее кольцо находится в центре, то есть концентрично с трубкой D, (1) тапочки перемещаются по кругу, концентричному с трубкой D, и, следовательно, никакого перекачивания не происходит. При перемещении плавающего кольца влево (2) тапочки вращаются по траектории, эксцентричной для трубы D и цилиндров, следовательно, поршни, проходя над линией XY, отходят от трубы D и втягивают масло через отверстия, E , в то время как поршни ниже XY подходят к трубке D и сливают масло через отверстия F.
При перемещении плавающего кольца вправо (3) происходит обратное действие: нижние поршни движутся наружу, вытягивая масло через отверстия F и верхние
- Рисунок 9.4 (a) Насос Hele-Shaw, см. Текстовый ключ к письма; (b) Насос Хеле-Шоу (1) Центральная часть плавающего кольца (2) Плавающее кольцо перемещено влево (3) Плавающее кольцо перемещено вправо. (John Hastie & Co Ltd)
поршней, движущихся в цилиндры и сливающих масло через отверстия E.
Направление потока зависит от расположения плавающего кольца слева или справа от центра.Плавающее кольцо можно переместить в любое промежуточное положение между центральным и максимальным положениями; количество сливаемого масла зависит от величины смещения плавающего кольца из его среднего положения.
Фиксирующая шестерня без реверса
Если установлены два насосных агрегата и работает только один, холостой насос может приводиться в движение в обратном направлении жидкостью под давлением от работающего насоса, если не установлена нереверсивная блокирующая шестерня (Рисунок 9.5). Эта передача является неотъемлемой частью гибкой муфты, соединяющей двигатель и насос.Он состоит из ряда стальных собачек, установленных на муфте двигателя так, что при работе насосных агрегатов они вылетают наружу из-за центробежного эффекта и не попадают в неподвижную стальную трещотку, прикрепленную к несущей конструкции двигателя.
Предел этого движения наружу достигается, когда собачки контактируют с окружающим кожухом, который вращается вместе с муфтой.
Когда насосы останавливаются, собачки возвращаются в свое нормальное внутреннее положение и входят в зацепление с храповыми зубьями, обеспечивая надежную блокировку против обратного вращения.Это действие является автоматическим и позволяет мгновенно выбрать и ввести в эксплуатацию любой агрегат без необходимости использования запорных клапанов насоса, которые обычно открыты — и закрываются только в аварийной ситуации.
Блокируется при движении в направлении стрелки
- Рисунок 9.5 Нереверсивная блокирующая шестерня для остановки работы насоса на холостом ходу (Dean)
универсальный шарнир и вращающийся на роликовых упорных подшипниках (в некоторых случаях на колодках Michel!) В пределах наклона коробка. Он установлен на цапфах и может наклоняться в любую сторону от вертикали с помощью внешнего управления; телемотор для рулевого механизма.
Когда наклонная коробка находится в вертикальном положении, гнездовое кольцо, цилиндр цилиндра и поршни вращаются в одной плоскости, и поршни не имеют хода. Поскольку коробка наклоняется, а вместе с ней и кольцо гнезда, ход поршня передается на каждую половину оборота, причем длина хода определяется углом наклона.
Тапочная колодка осевого цилиндрового насоса
Это еще одно усовершенствование описанного выше насоса, подходящее для более высоких давлений, требуемых при разработке систем рулевого управления и стабилизатора киля.Кольцо гнезда и шатуны заменены на скользящие колодки в откидной коробке, причем сферические концы поршней находятся в колодках. Наклон регулируется сервопоршнем, который приводится в действие гидравлическим давлением. На рис. 9.7 показан разрез.
Другой вариант — насос Sunstrand (рисунок 9.8), в котором обратимая наклонная шайба, расположенная вертикально и обеспечивающая желаемый угол поворота с помощью встроенного сервопоршня, используется для изменения количества и направления гидравлической жидкости.
Гидравлический телемотор
На многих судах телемотор стал резервным рулевым механизмом, используемым только при выходе из строя электрического или автоматического рулевого управления. Он состоит из передатчика на мосту и приемника, подключенного к насосу переменной подачи рулевого механизма через охотничье снаряжение. Передатчик и приемник соединены сплошными тянутыми медными трубками. Вытеснение жидкости в передатчике вызывает соответствующее смещение в приемнике и перемещение блока управления насосом через охотничье снаряжение.
Измерительный преобразователь (рисунок 9.9) состоит из цилиндра с основанием на пьедестале, который содержит поршень, приводимый в действие реечной передачей от рулевого колеса. Бак подпитки функционирует автоматически с помощью подпружиненных клапанов сброса и подпитки. Избыточное давление в телемоторной системе вызывает выпуск масла через предохранительный клапан в бак подпитки, а потеря масла компенсируется через слегка нагруженный клапан подпитки. Два клапана соединены через запорный клапан, который обычно остается открытым, и байпас, который соединяет обе стороны системы давления, когда поршень находится в среднем положении.Есть также ручной байпас. f un * 1s |
unn-on ocs.f un * 1s |
унн-на ocs.gnf a loprov.di
рычаг iff vo или moving co.
com rol uni!
Maiimum 1r! L angi
Trixinion tor nand levpr control или lil! индикатор
Рисунок 9.7 Расположение тапочек VSG (Vickers Ltd)
A. Управляющий поршень
В. Вспомогательный насос
C. Порты
D Плавающее уплотнение
E. Плавающий поршень
F. Шлицевая муфта
г. Поршень компенсационный
H.Блок клапанов J. Корпус по центру K. Корпус по центру L. Торцевое кольцо с плавающей пленкой M. Рабочий поршень N. Цилиндр O. Наклонная коробка
P. Кожух, концевая часть Q. Торцевая крышка R. Вал S Упорная пластина T. Подушка скольжения U. Отливка удерживающей пластины, с контурными трубами, присоединенными к внешнему концу каждого цилиндра. Любая жидкость, вытесняемая поршнем в цилиндре передатчика, будет выталкиваться через трубы и клапан контура в принимающий цилиндр. Плунжеры приемника зафиксированы в показанном устройстве, и любое смещение жидкости заставляет корпус цилиндра перемещаться вдоль гидроцилиндров против сжатия одной из пружин.Сжатая пружина служит для возврата приемника, а вместе с ним и передатчика в мидель, когда рулевой отпускает штурвал. Связь с управлением насосом через охотничий рычаг прикреплена к одному концу корпуса цилиндра.
Варианты плавающего рычага охотничьего снаряжения
На рис. 9.10 схематично показаны три варианта плавающего рычага, выполняющего роль регулирующего и отключающего механизма. На каждой диаграмме управление движением
СЕРВОЦИЛИНДР
WSTON
Рисунок 9.8 Насос Sunstrand применяется в точке A, точка B связана с телом, движение которого должно контролироваться, а точка C связана с механизмом управления источником энергии, то есть в рулевом механизме корабля движение точки A контролируется Рулевой, точка B, известная как точка охоты, связана с точкой на румпеле, а точка C связана с рычагом (-ами) управления на насосе (-ах). Плавающий рычаг поворачивается поочередно вокруг точек B и A, выполняя функции управления и отключения соответственно, так что рычаг « плавает » в пространстве и, как можно видеть на диаграммах, расстояние между одной или несколькими парами точек крепления на рычаг меняется по мере движения.Вследствие этого движение рычага является чрезвычайно сложным и его трудно представить как непрерывный процесс. Однако, если пошагово изучить геометрию системы в каждом из ее положений покоя, принципы работы станут ясны.
Для того, чтобы определить геометрию системы и обеспечить ее правильное функционирование, разумно наложить следующие ограничения на конструкцию:
(a) Любая точка A или точка C, но не обе, должны занимать фиксированное положение по длине рычага: другая должна быть оставлена свободной для продольного перемещения в рычаге, чтобы приспособиться к изменению расстояния между ними. .
(b) Точки A и C должны быть ограничены перемещением по известным локусам, чтобы гарантировать точность системы,
(c) Точка B должна свободно перемещаться в рычаге в продольном направлении.
ЦИЛИНДР
ПОИСК
ПЛАСТИНА
- Рисунок 9.9 Патентованный телемотор с гидравлическим рулевым управлением (Brown Bros & Co Ltd)
- Рисунок 9.10 Плавающий рычаг (Brown Bros & Co Ltd)
A. Контрольная точка B.Пункт охоты C. Пункт управления насосом
На трех диаграммах (рис. 9.10) контрольная точка A была выбрана в качестве опорной точки и ограничена перемещаться только по прямой линии, такой как AA ‘, точка поиска B может свободно скользить в прорези плавающего рычага и точка управления насосом C выполнена с возможностью скользить в другой паз и вынуждена двигаться по прямой линии, такой как CC ‘.
Теперь, если мы предположим, что корабль движется прямым курсом, точки A, B и C на каждой из диаграмм лежат на средней линии, поскольку рулевые органы управления и руль направления централизованы, а насос находится в режиме холостого хода. или нейтральное состояние.Перемещение точки A в A ‘, которое соответствует требуемому углу руля направления, заставляет плавающий рычаг поворачиваться вокруг точки B, а точка C перемещается в C’, что приводит к включению насоса (-ов) в правильном направлении. По мере того, как руль направления движется к углу, «заказанному» движением A к A ‘, точка B, которая связана с румпелем, перемещается в сторону B’, при этом плавающий рычаг теперь поворачивается вокруг A ‘, удерживаемый там рулевым. , заставляя точку C ‘вернуться в C. Точки B’ и C ‘достигают точек B и C одновременно, переводя насосы в состояние холостого хода и останавливая руль направления точно под заданным углом.Если теперь контрольная точка перемещается назад из A ‘в среднее положение A, плавающий рычаг поворачивается вокруг B’, точка C перемещается в новое положение C «на противоположной стороне средней линии, помещая насос (s ) на ход, чтобы привести рулевое управление обратно в среднее положение. Рычаг снова поворачивается вокруг A, когда шестерня возвращается, точка B ‘перемещается обратно в B, в результате чего C «перемещается обратно в C, таким образом помещая насос (ы) в состояние холостого хода и перевод руля направления в среднее положение. Перемещение точки A в положение A «(не показано) на противоположной стороне от средней линии, а затем обратно в A будет иметь аналогичный эффект, за исключением, конечно, того, что движения руля направления и все движения охоты будут также происходить на сторона, противоположная средней линии показанной.
Механическое устройство системы плавающих рычагов не всегда может быть в одной из трех проиллюстрированных форм, но, если понять принцип и иметь в виду, что его основные функции — инициировать движение рулевого механизма и останавливать движение, когда руль достигает угла, предписанного рулевым, читателю не составит труда распознать любое плавающее рычажное устройство, с которым он может столкнуться.
Подробное описание гидравлической системы с двумя гидроцилиндрами
Со ссылкой на эскиз (рисунок 9.11) дублирующие силовые агрегаты PU1 и PU2, каждый из которых имеет непрерывно работающий электродвигатель, приводящий через гибкую муфту аксиально-цилиндровый насос с регулируемой подачей и вспомогательные насосы A I, A2. Последний забирает отфильтрованное масло из резервуара Т и сливает его через 10-микронный фильтр F10 для подачи масла под постоянным давлением к сервоуправлению SC, к автоматическим переключающим клапанам CO, чтобы поддерживать поток холодного масла через главный насос. кожухов и для компенсации любых потерь масла из магистрали
- Рисунок 9.11 Гидравлическая схема типового двухцилиндрового электрогидравлического рулевого механизма
ПУ, ПУ2, Силовые агрегаты
A1, A2, Вспомогательные насосы
I Водохранилище
Фильтры F10
SC Сервоуправление co
Переключающие клапаны
PC20 Клапаны ограничения давления CV Обратные клапаны P1, P2 Запорные клапаны LV Запорные клапаны
BP Перепускной клапан RV Предохранительный клапан HP Запорные клапаны ручного насоса WP Система обратных клапанов. Когда основные насосы не работают, вспомогательные насосы нагнетают воду в резервуар через клапан ограничения давления PC20, установленный на 20 бар, и в корпуса насоса.Когда главные насосы работают, вспомогательные насосы нагнетают воздух на всасывание основного насоса.
Главный насос можно запустить в любое положение шестерни, в любое время, запустив двигатель. Сервоприводные автоматические переключающие клапаны (рисунок 9.12) удерживаются в состоянии байпаса пружиной, в то время как соответствующий насос находится в состоянии покоя. Когда насос запускается, давление вспомогательного насоса увеличивается, преодолевает пружину, закрывает байпас и подключает основной насос к гидравлической системе.Таким образом, основной насос запускается в ненагруженном состоянии; он не может быть приведен в движение в режиме холостого хода из-за потока поперечного давления, и нагрузка удерживается до тех пор, пока высокий пусковой ток электродвигателя не снизится до рабочего уровня. Когда насос останавливается, пружина возвращает клапан в состояние байпаса. Конец пружины клапана соединен с линией постоянного давления, и, чтобы избежать гидравлической блокировки, камера пружины имеет спускную линию. От автоматических переключающих клапанов CO нагнетание основного насоса проходит к запорным клапанам насоса Pi и P2 и в цилиндры через запорные клапаны LV.Эти клапаны объединены в групповой клапанный блок таким образом, чтобы обеспечивать перекрестные соединения с байпасным клапаном BP, предохранительным клапаном RV и аварийными запорными клапанами ручного насоса HP с соответствующими обратными клапанами NR.
Рисунок 9.12 Сервоприводной автоматический переключающий клапан
Рисунок 9.12 Сервоприводной автоматический переключающий клапан на открытой воде обычно используется один силовой агрегат. Если требуется более быстрая реакция редуктора, два агрегата могут работать одновременно, чтобы удвоить поток масла и увеличить скорость работы.
Обычно передача управляется с моста через электрический телемотор и местный блок управления, но также предусмотрен местный маховик управления, который является средством связи с мостом.
Снаряжение закрытое охотничье
Маховик (рисунок 9.13) для местного управления имеет коническую шестерню, которая входит в зацепление с аналогичным колесом на валу с винтом, когда фиксатор (фиксатор) поднимается и маховик вдвигается внутрь. Вал винта обычно поворачивается в требуемое положение. электродвигателем с расщепленным полем.
Легкая конструкция комбинированного рулевого и охотничьего снаряжения возможна благодаря умеренным усилиям. Автономный блок самосмазывающийся и заключен в маслонепроницаемый корпус. Мощность насоса рулевого механизма и, следовательно, движение руля направления контролируется плавающим рычагом, один конец которого приводится в движение управляющим электродвигателем (или телемотором), а другой конец — движением румпеля, стержня, прикрепленного к его средней точке и к рычагу управления насосом, запускает насос в ответ на движение плавающего рычага управляющим электродвигателем или телемотором.При движении румпеля замыкающая тяга противодействует движению и останавливает шестерню, восстанавливая насос
Рисунок 9.13 Блок управления, версия с электрическим дистанционным вводом и локальным механическим вводом (Brown Bros & Co Ltd)
Рычаг управленияв положение холостого хода. Пружинные звенья, расположенные надлежащим образом, исключают чрезмерную нагрузку на механизм.
Конец плавающего рычага, соединенный с механизмом дистанционного управления, прикреплен к блоку, который перемещается по валу винта, когда последний вращается двигателем управления или маховиком местного управления.Ход ограничен стопорными кольцами.
Подробное описание гидравлической системы с четырьмя гидроцилиндрами
На чертеже шестерни с четырьмя гидроцилиндрами (рис. 9.14) показаны суппорты Rapson, комбинированная конструкция направляющей и распорки, описанная ранее, а также блок управления с его соединительным звеном от баллера руля. Также показана вторая связь от приклада к передатчику указателя угла поворота руля.
Гидравлический контур (рисунок 9.15) включает в себя расположение стопорных и перепускных клапанов в VC груди, которые позволяют приводить в действие все четыре или любые два соседних цилиндра, но не с двумя диагонально расположенными цилиндрами.X, OH «Sic»
- Рисунок 9.14 Четырехцилиндровый электрогидравлический рулевой привод с электрическим управлением (Brown Bros & Co Ltd)
- Рисунок 9.15 Гидравлическая схема четырехцилиндрового электрогидравлического рулевого механизма (Brown Bros & Co Ltd)
B1-B4. Перепускные клапаны C1-C4. Запорные клапаны цилиндра Другие условные обозначения см. На рис. 9.11
полезная комбинация цилиндров. Можно видеть, что крутящий момент, доступный от двух цилиндров, составляет лишь половину крутящего момента от четырех, даже когда работают оба силовых агрегата, хотя скорость работы будет увеличиваться, если используются оба.
Механическое расположение механизма управления и основной гидравлической системы, за исключением их компоновки (рисунок 9.15), идентичны уже описанным двум гидроцилиндрам. Однако блок клапанов должен обслуживать четыре цилиндра во всех полезных комбинациях. Для этого требуются четыре запорных клапана цилиндра, Cl — C4, и четыре перепускных клапана, B1-B4. Устройство ручного аварийного насоса, его гидрораспределитель, предохранительный клапан основной системы и запорные клапаны остаются неизменными, как и устройства дистанционного, местного и аварийного управления.
Обычно насос и четыре запорных клапана цилиндров, Pi, P2, C1-C4, а также запорные клапаны LV руля направления открыты. Перепускные клапаны Bl — B4 и запорные клапаны аварийного ручного насоса HP закрыты. Силовые агрегаты могут быть приведены в действие или остановлены путем запуска или остановки соответствующих двигателей.
Для перехода от работы с четырьмя гидроцилиндрами к работе с двумя гидроцилиндрами необходимо вывести из строя только два цилиндра, закрыв их запорные клапаны C1-C4 и открыв перепускные клапаны между ними.Например, для управления цилиндрами 1 и 3 клапаны C2 и C4 закрыты; B2 и B4 открываются, так что цилиндры 2 и 4 изолированы от основной гидравлической системы, и масло в них может свободно перетекать от одного к другому. Запорные клапаны цилиндра и байпасные клапаны показаны как отдельные элементы на схеме, но каждая пара может быть объединена как двойной седельный клапан, так что, поскольку любой цилиндр изолирован от основной гидравлической системы, он автоматически открывается в байпасный коллектор и в другой неработающий цилиндр.
Четырехцилиндровый привод с сервоуправляемыми осевыми цилиндровыми насосами
Варианты аксиально-цилиндрового насоса с наклонной шайбой с сервоуправлением (рис. 9.16) могут работать при давлении 210 бар. Каждый насос укомплектован собственным моментным двигателем, сервоклапаном, запорным механизмом, запорным клапаном и маслоохладителем. Эти насосы приводятся в действие, как описано ранее, и не допускается включение холостого насоса.
Вращающийся узел насоса, состоящий из цилиндра, девяти поршней, тарелки клапана, тапочек, тарелки тапочек и стопорного кольца, изготовлен из стали EN8, которая окончательно подвергается механической обработке, термообработке и затем закалке для длительного износа.Девять поршней оснащены возвратными пружинами. Корпус и крышки из чугуна с шаровидным графитом. Блок главного клапана изготовлен из стали EN8 и вмещает пять обратных клапанов, предохранительный клапан главного насоса, повышающий и сервоперегрузочный клапаны, повышающий шестеренчатый насос и сервоприводные насосы. Трубопровод от блока клапанов питает сервопоршни через сервоклапан. Главный привод через шлицевой вал к цилиндру
.N0TE>
прил., Длина упоров при сборке для обеспечения требуемого угла перекоса
Рисунок 9.16
Аксиально-цилиндровый насос Hastie (John Hastie and Co Ltd)
N0TE>
прил., Длина упоров при сборке для обеспечения требуемого угла перекоса
Рисунок 9.16
Аксиально-цилиндровый насос Hastie (John Hastie and Co Ltd)
Рисунок 9.17 Система управления насосом Hastie (John Hastie & Co
ООО)
Рисунок 9.17 Система управления насосом Hastie (John Hastie & Co
ООО)
корпус помпы.Качающаяся шайба насоса приводится в действие двумя сервоцилиндрами, которые получают масло под желаемым давлением через направленный сервоклапан. Сервоклапан сначала перемещается моментным двигателем, действующим на запрос входного сигнала, и возвращается в нейтральное положение с помощью тяги, соединенной с наклонной шайбой. Движущееся действие достигается за счет применения простой рычажной системы, соединяющей входной и смещающий сервоклапан, а также за счет дрейфующего действия под углом наклонной шайбы насоса.Это позволяет очень быстро реагировать.
Система управления представлена на Рисунке 9.17. Как будет видно, моментный двигатель, получив соответствующий сигнал от моста через блок усилителя, приводит в действие плавающий рычаг, в ответ включающий насосы. Движение плавающего рычага больше не требуется, поскольку обычное управление рулевым механизмом с мостика осуществляется с помощью электрического сигнала. Сигнал направляется на моментный двигатель, который управляет сервоклапаном, который, в свою очередь, управляет насосом.Когда рулевой механизм достигает необходимого угла поворота руля, блок обратной связи, подключенный непосредственно к баллеру руля, отменяет входной сигнал на усилитель управления, и рулевой механизм удерживается под этим углом до тех пор, пока не потребуется еще одно движение руля направления.
Эта форма управления устраняет необходимость в механической навеске и охотничьем снаряжении на рулевом механизме.
Более поздние модификации
Катастрофа Amoco Cadiz привлекла внимание к тому факту, что отказ общей системы гидравлических трубопроводов четырехцилиндрового рулевого механизма с дублированными силовыми агрегатами может привести к быстрому сливу масла из контура и потере способности рулевого управления.Разработаны четырехплунжерные или двухлопастные редукторы с дублированием гидравлических контуров, а также дублирование насосов. Однако такое устройство не может работать с обоими работающими насосами и изолированными друг от друга дублированными гидравлическими контурами. Для работы с обоими насосами системы должны быть подключены совместно. Любой из насосов может обеспечивать гидравлическую мощность для комбинированного контура или для изолированной половины, при этом байпас открыт с другой стороны.
На рис. 9.18 показано четырехдневное орудие, соответствующее правилам Международной конвенции по охране человеческой жизни на море (СОЛАС) (1974 г., с поправками от 1981 г.), касающимся танкеров, танкеров-химовозов или газовозов водоизмещением от 10000 бт и более (см., В частности, главу 11 -1 Правило 29, Параграф 16}.
Два основных силовых агрегата и серво-силовые агрегаты питаются из двухкамерного бака, оборудованного переключателями уровня масла, расположенными на трех уровнях. Уровень i дает начальный сигнал тревоги после потери масла из любой системы. В нормальном режиме один или
Matn power un il A ‘
Matn power un il A ‘
Блок предохранительных клапанов ручной перепускной 2off
Запорный клапан насоса * выключен с ручным управлением
I S * r vo powif
Рисунок 9.18 Сплит-система Hastie-Brown, показанная здесь в раздельном режиме, устроена так, чтобы автоматически приводить в действие два гидроцилиндра в случае потери жидкости из одной системы
Блок предохранительных клапанов ручной перепускной 2off
Запорный клапан насоса * выкл. С ручным управлением
I S * r vo powif
Рисунок 9.18 Сплит-система Hastie-Brown, показанная здесь в раздельном режиме, устроена так, чтобы автоматически приводить в действие два гидроцилиндра в случае потери жидкости из одной системы, оба силовых агрегата обеспечивают гидравлическую мощность для всех четырех гидроцилиндров. Продолжающаяся потеря масла приводит к срабатыванию одного или обоих переключателей уровня 2. Они приводят в действие соответствующие сервоклапаны с электромагнитным управлением, заставляя работать комбинированные изолирующие и байпасные клапаны, разделяя систему таким образом, что каждый блок питания питает только два гидроцилиндра. При этом при остановке одного энергоблока он автоматически запускается.
Дальнейшая потеря масла и система, в которой она происходит, будут управлять одним из переключателей уровня 3. Это отключит блоки питания на неисправной стороне. Затем рулевое управление продолжается без перебоев, но с половиной расчетного максимального крутящего момента аудиосистемы. Неисправная система вышла из строя и изолирована.
Зубчатая передача
Их можно рассматривать как эквивалент двухцилиндрового редуктора с крутящим моментом в зависимости от размера. Узел из двух поворотных лопастных шестерен, расположенных одна над другой, обеспечивает надежность четырехпакетной шестерни.Рисунок 9.19 иллюстрирует принцип.
Ротор C прикреплен к коническому балку руля и закреплен на нем шпонкой, статор B прикреплен к конструкции корабля. Неподвижные лопатки, закрепленные на равном расстоянии в отверстии статора, и вращающиеся лопатки, закрепленные на равном расстоянии в роторе, образуют два набора камер давления в кольцевом пространстве между ротором и статором. Они соединены между собой коллектором. Жидкость, подаваемая под давлением в один комплект этих камер, будет вращаться по часовой стрелке, и руль направления повернется влево или вправо, если альтернативный комплект находится под давлением.
Три неподвижных и три движущихся лопатки являются обычными и допускают общий угол руля направления 70 °, т. Е. 35 дюймов в каждом направлении. Перемещение, достигаемое с помощью шестерни с двумя неподвижными и двумя движущимися лопатками, может составлять 130 °. Рисунок 9.19 (b) показывает детали типичного устройства.
Неподвижные и вращающиеся лопатки могут быть из чугуна с шаровидным графитом. Они надежно прикреплены к ротору и статору из литой стали с помощью установочных штифтов из высокопрочной стали и болтов с головкой под ключ. Шпонки также установлены по длине поворотных лопаток для обеспечения механической прочности.Сборка зубчатой передачи была бы невозможна, если бы неподвижные лопатки были со шпонкой; они полагаются на дюбели для обеспечения эквивалентной прочности. Считается, что фиксация лопаток имеет достаточную прочность, чтобы сделать их пригодными для использования в качестве упоров руля направления. Стальные уплотнительные ленты с подкладкой из синтетического каучука вставляются в канавки вдоль рабочих поверхностей неподвижных и поворотных лопаток, обеспечивая тем самым высокий объемный КПД 96-98% даже при давлении предохранительного клапана 100 бар и более. Вращение B предотвращается с помощью двух анкерных кронштейнов и двух анкерных штифтов.Якорные кронштейны надежно прикреплены к судну болтами. Между внутренней стороной фланцев статора и верхней и нижней частями анкерных кронштейнов имеется вертикальный зазор, обеспечивающий вертикальное перемещение руля направления. Этот зазор варьируется в зависимости от размера поворотно-лопаточного блока, но в целом составляет примерно 38 мм, и необходимо, чтобы держатель руля был способен ограничивать вертикальные движения руля направления до меньшего, чем это значение.
Метод управления этими шестернями, а также гидравлической системой подачи, такой же, как и для электрогидравлических шестерен.
- Рисунок 9.19 (a) Работа поворотной лопасти
A. Руль
Б. Статор
C. Ротор E. Неподвижные лопатки
F. G. Камеры давления H. Коллекторы
C. Ротор E. Неподвижные лопатки
Рисунок 9.19 (b) Роторно-лопаточный блок
A. Запорная арматура
Б. Статор
C. Ротор
D. Поворотные лопатки E Фиксированные лопатки
г. Коллекторы верхний (правый) и нижний (левый)
H.Стальные уплотнительные ленты J. Gland
K. Сальниковая набивка
L. Анкерный кронштейн M. Винтовая втулка N. Анкерный болт R. Отливка запорного клапана S. Шпиндель запорного клапана
- Рисунок 9.20 Электрогидравлический рулевой привод (гидравлическое управление). Общее устройство рулевых механизмов приводного типа (Brown Bros & Co Ltd)
- обозначения букв, см. Текст
Рулевой механизм с насосом постоянной производительности
Рулевой механизм, как и любая гидравлическая система, может приводиться в действие насосом постоянной подачи в качестве альтернативы традиционному типу переменной подачи.Выход из насоса, который работает непрерывно, циркулирует через байпас до тех пор, пока не потребуется для движения рулевого механизма.
Малогабаритные ручные и силовые шестерни
Более простой вариант электрогидравлического привода, для малых судов, требующих крутящего момента на руле, скажем, ниже 150 кНм, показан на рисунке 9.20. Гидравлический контур схематически показан на рисунке 9.21.
Гидравлические цилиндры (U) рулевых цилиндров двустороннего действия G, которые могут свободно колебаться на клиньях цапфы, соединены непосредственно с румпелем.F — цилиндр управления двойного действия, соединенный с плавающим рычагом V штангой O. J — гидрораспределитель, связанный со средней точкой плавающего рычага пружинным звеном Z. W — отсекающее звено от румпеля к плавающий рычаг. H — запорный клапан, I — байпасный клапан.
Клапаны C, D и S управляются соленоидом. Когда не запитан, C открыт, а D закрыт для сквозного потока, но действует как байпас между концами управляющего цилиндра F, когда соленоид S закрыт. Когда соленоиды находятся под напряжением, C замкнут, D и S разомкнуты.J работает только при рулевом управлении с усилителем.
При ручном управлении C, D и S не находятся под напряжением. Насос B в опоре рулевого управления, соединенный с колесом, подает жидкость под давлением прямо в цилиндры G рулевого управления, таким образом перемещая румпель в направлении и в той степени, которая соответствует движению колеса. Нет никаких охотничьих действий.
Для перехода на гидроусилитель рулевого управления запускается силовой насос, и на C, D и S подается питание, т. Е. C закрывается, D перестает быть байпасом, и он соединяет насос опоры рулевого управления с цилиндром управления F.S, теперь открытый, позволяет жидкости проходить от силового насоса к J, который теперь попадает под действие плавающего рычага. Движение рулевого колеса теперь перемещает поршень в F, плавающий рычаг поворачивается на его креплении к W, и J открывается, чтобы позволить силовому насосу разгрузиться к соответствующим концам рулевых цилиндров G. По мере движения румпеля происходит резкое движение. , отрезное звено W воздействует на плавающий рычаг, который, поворачиваясь на его креплении к О, замыкает J и переводит шасси в положение покоя с рулем направления под требуемым углом.
Указатели угла поворота руля, с механическим или электрическим приводом, устанавливаются по мере необходимости. Для местного управления концы управляющего цилиндра объединяются путем открытия перепускного клапана, а управляющий поршень перемещается ручным рычагом (показан пунктиром) или, например, колесом, рейкой и шестерней. Видно, что в ненагруженном состоянии нагнетание насоса циркулирует через J.
.Аварийное рулевое управление осуществляется с помощью разгрузочных приспособлений, устанавливаемых, когда руль направления заблокирован закрытием клапанов H.
Sf требуется только ручное рулевое управление, редуктор сокращен до румпеля, цилиндров и гидроцилиндров, запорных и перепускных клапанов, индикатора руля направления и рулевой колонки с насосом. Простая форма этой передачи для крутящего момента менее 11 кНм показана на рисунке 9.22.
- Рисунок 9.22 Гидравлический рулевой привод
Неисправности рулевого механизма и меры безопасности
Жизненно важное значение рулевого механизма отражено в постановлениях государственного департамента, отвечающего за судоходство (обычно Министерства транспорта или береговой охраны), в требованиях классификационных обществ (Регистр Ллойда, Американское бюро судоходства, Bureau Veritas и др.) И рекомендации Международной морской организации (ИМО).
Некоторые общие требования к рулевым механизмам, основанные на различных правилах и СОЛАС 1974, приведены ниже:
(1) Суда должны иметь главный и вспомогательный рулевые механизмы, устроенные таким образом, чтобы отказ одного не приводил к неработоспособности другого. Вспомогательный рулевой механизм не требуется, однако, если главный рулевой механизм имеет два или более идентичных силовых агрегата и устроен таким образом, что после единичного отказа в его системе трубопроводов или одном из его силовых агрегатов способность рулевого управления может сохраняться.Чтобы соответствовать этому последнему варианту, рулевой механизм должен соответствовать условиям эксплуатации параграфа 2 — в случае пассажирских судов, когда какой-либо из силовых агрегатов не работает. В случае крупных танкеров, танкеров-химовозов и газовозов установка двух или более идентичных силовых агрегатов для главного рулевого механизма является обязательной.
(2) Главный рулевой механизм должен иметь возможность управлять судном с максимальной передней рабочей скоростью и иметь возможность на этой скорости и при максимальной рабочей осадке судна переводить руль с 35 ° с одной стороны на 30 ° с другой стороны. не более 28 см.(Явная аномалия в степени перемещения состоит в том, чтобы затруднить определение момента достижения конечного положения из-за обратной связи от охотничьего снаряжения, которая сокращает ход насоса с регулируемой подачей.) Если балер руля, не считая припуска на ледовое усиление, требуется Чтобы иметь диаметр 120 мм у румпеля, рулевой механизм должен приводиться в действие с усилителем.
(3) Вспомогательный рулевой механизм должен иметь возможность быстро приводиться в действие и иметь возможность переворачивать руль от 15 ° с одной стороны до 15 ° с другой стороны не более чем за 60 метров, когда судно находится в самом глубоком положении. осадка и движение вперед со скоростью, превышающей половину максимальной эксплуатационной скорости или 7 узлов.Если баллер руля (без учета поправки на ледовое усиление) превышает диаметр румпеля более 230 мм, то редуктор должен приводиться в действие от источника энергии.
(4) Должна быть предусмотрена возможность ввода в действие основных и вспомогательных силовых агрегатов рулевого механизма с ходового мостика. Отказ питания любого из силовых агрегатов рулевого механизма или его системы управления должен приводить к звуковой и визуальной тревоге на ходовом мостике, и силовые агрегаты должны быть настроены на автоматический перезапуск при восстановлении электропитания.
(5) Управление рулевым механизмом должно быть предусмотрено как на мосту, так и в помещении рулевого механизма для главного рулевого механизма, и, если главный рулевой механизм состоит из двух или более идентичных силовых агрегатов, должны быть две независимые системы управления, обе управляемые с мост (это не значит, что требуются два штурвала). Когда для системы управления используется гидравлический телемотор, установка второй независимой системы не требуется, за исключением танкера, химовоза или газовоза грузоподъемностью 10 000 тонн и более.Управление вспомогательным рулевым механизмом должно быть расположено в помещении рулевого механизма, а там, где вспомогательный механизм приводится в действие от источника энергии, управление также должно осуществляться с мостика и быть независимым от системы управления основным рулевым механизмом. Должна быть возможность из помещения рулевого механизма отсоединить любую систему управления, работающую с моста, от рулевого механизма, который он обслуживает. Должна быть обеспечена возможность запуска системы с моста.
(6) Гидравлические силовые системы должны быть оборудованы приспособлениями для поддержания чистоты гидравлической жидкости.Сигнализация низкого уровня должна быть установлена на каждом резервуаре с гидравлической жидкостью, чтобы дать раннюю звуковую и визуальную индикацию на мосту и в машинном отделении о любой утечке гидравлической жидкости. Рулевые механизмы с гидроусилителем требуют резервуара для хранения, расположенного так, чтобы гидравлические системы можно было легко перезарядить с места в отсеке рулевого механизма. Емкость бака должна быть достаточной для перезарядки хотя бы одной силовой исполнительной системы.
(7) Если требуется, чтобы баллер руля был более 230 мм в диаметре у румпеля (за исключением ледового усиления), в пределах 45 секунд.Он должен обеспечивать питание силового агрегата, его системы управления и индикатора угла поворота руля и может обеспечиваться от аварийного источника питания судна или от независимого источника энергии, расположенного в рулевом отделении и предназначенного для этой цели. Его пропускная способность должна составлять не менее 30 минут для судов массой 100000 тонн и более и 10 минут для других судов.
Проверка рулевого механизма
За исключением судов, регулярно совершающих короткие рейсы, рулевой механизм следует тщательно проверять и испытывать в течение 12 часов до отправления.Эти испытания должны включать в себя проверку аварийных сигналов отказа энергоблока и системы управления, аварийного источника питания (при необходимости) и устройств автоматической развязки.
Каждые три месяца должны проводиться учения по аварийному рулевому управлению, которые должны включать прямой контроль из рулевого отделения, во время которого следует практиковать использование процедуры связи с ходовым мостиком.
Читать здесь: Носовые подруливающие устройства
Была ли эта статья полезной?
Схема системы механического рулевого управления| Купить автозапчасти
Система рулевого управления перемещает колеса автомобиля в ответ на движение рулевого колеса.На схеме выше изображены основные компоненты механической системы рулевого управления. Он включает рычаг Pitman, рычаг натяжного ролика, рулевые тяги и центральную тягу / тягу.
Рычаг Pitman: Рычаг Pitman соединяет рулевой механизм, прикрепленный к нижней части рулевого вала, и центральную тягу / тягу. Рычаг Pitman преобразует радиальное движение рулевой колонки или вала в линейное движение, которое поворачивает колеса автомобиля. Когда рулевое колесо поворачивается, червячная передача внизу рулевого вала вращает набор зубьев.Это побуждает шестерню приводить в действие рычаг Питмана, который, в свою очередь, заставляет рулевую тягу поворачивать колеса.
Натяжной рычаг: Натяжной рычаг удерживает рулевой механизм напротив рычага Питмана. Центральная тяга / тяга и рулевые тяги соединены с натяжным рычагом. Когда рулевое колесо поворачивается, активируется рычаг Pitman, который, в свою очередь, перемещает рычаг холостого хода в параллельном вращательном движении. Эта серия действий в конечном итоге поворачивает колеса автомобиля.
Тяги и наконечники рулевых тяг: Тяги удерживают колесо прямо при минимальном повороте, а также выдерживают растягивающие нагрузки, возникающие при рулевом управлении.Конец внутренней рулевой тяги расположен близко к центральной линии автомобиля. Он передает движение рулевой рейки на внешний конец рулевой тяги. Концы внутренней и внешней рулевой тяги в основном представляют собой рядные и прямоугольные шаровые шарниры соответственно.
Тяга / центральная тяга: Один конец тяги соединен с рычагом Pitman, а другой конец — с рычагом натяжного ролика. Он передает движение рычага Pitman на рычаг холостого хода. Длина тяги влияет на передаточное отношение рулевого управления.
Приобретите оригинальные автомобильные запчасти по бесконкурентным ценам здесь!
Buy Auto Parts предлагает широкий ассортимент запасных и неоригинальных запчастей для всех марок и моделей. Чтобы найти запчасть для вашего автомобиля, просто сообщите нам год выпуска, марку и модель вашего автомобиля. Ваш заказ будет отправлен со склада, ближайшего к вам. Мы предлагаем бесплатную доставку для покупок на сумму более 99 долларов США в континентальной части США. Наши продукты были тщательно протестированы на соответствие отраслевым стандартам или превосходящие их.Вы можете связаться с нами по нашей линии поддержки по телефону 1-888-907-7225 или оставить нам электронное письмо по адресу [адрес электронной почты защищен], если вам нужна помощь в выборе детали. Пожалуйста, оставьте нам онлайн-обзор. Мы ценим ваши отзывы!
СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ: ТЕЛЕМОТОР, Механизм охотничьего снаряжения, Электрогидравлическая система рулевого управления с 4 RAM, Электрогидравлическая система рулевого управления с 2 RAM, РЕГУЛИРОВКА РУЛЕВОГО ПРИВОДА, БЕЗОПАСНОСТЬ РУЛЕВОГО ПРИВОДА: Marine Engineering
. штурвал любого корабля, похожего на автомобиль, где все управление «Управляемость» автомобиля зависит от рулевого колеса водителя.В «Управляющая сила» для поворота осуществляется от колеса на штурвале, которое достигает система рулевого управления гидравлическими средствами. Система рулевого механизма генерирует скручивающая сила определенного масштаба, которая затем, в свою очередь, передается на балер, поворачивающий руль.
· передача на баллер.
В аппаратура управления транспортирует сигнал о желаемом угле поворота руля с мостика и активирует силовой агрегат и систему трансмиссии, пока не будет достигнут желаемый угол.
Мощность блок обеспечивает силой, когда это необходимо и с немедленным вступлением в силу, переместить руль направления на желаемый угол.
В система трансмиссии , рулевой механизм, это средство, с помощью которого движение руля направления удавшийся.
А гидравлический устройство, с помощью которого движение колеса на мостике корабля управляет рулевой механизм на корме.
· На изображении показан типичный блок гидравлического передатчика. Шестерня, приводящая в движение поршни, поворачивается колесо моста.
· Кожух обычно металлический, с бронзовые плашки и медные трубы вводятся в отливку с помощью гофрированных выводов
· Шестерня соединена с мостом. колесо.
· Когда колесо повернуто на STBD, шестерня толкает правую дорожку вниз.
· Подъемник, прикрепленный к стойке, толкается вниз, который вытесняет масло в правой камере.
· Масло перекачано в ресивер, а из ресивера масло заливает левую камеру и толкает левый плунжер вверх.
Перепускной клапан:
• Байпас клапан необходим в системе, чтобы разрешить изменение объема масла что может произойти из-за изменения температуры.
• Это помогает поддерживать равновесие в системе
• Помогает при дозаправке системы при течи
• Акты как предохранительный клапан при повышении давления.
Система зарядки:
Это полная система состоит из масляного резервуара, ручного насоса и специального трубопровода в для заправки масла в систему в случае потери масла из-за утечки.На трубопроводе будет рычаг для выбора необходимого резервуара. Управляя этим рычаг, можно выбрать правый или левый резервуар. Масло можно перекачивать через руку насос. Масло потечет в выбранный бак и заполнится. Смотровое стекло есть предоставлен для проверки уровня.
Снасти охотничьи Механизм:
Это механизм в системе рулевого механизма — это система обратной связи, которая передает положение руля направления к рычагу управления накачкой через плавающий рычаг.
Один конец плавающий рычаг соединен с охотничьим рычагом.Другой конец подключен к телемоторный приемник. Середина плавающего рычага, подключенного к блоку управления насосом рычаг.
При накачке рычаг управления находится в положении «B», насос не нагнетает.
Когда движение дается на мосту, приемник телемотора перемещает плавающий рычаг от A к A1. (СТБД)
Когда это происходит, рычаг управления насосом перемещается из B в B1.
Как он движется из точки B в любую другую точку, насосы начнут перекачивать гидравлическую жидкость под давлением. масло для гидроцилиндров.Это заставит руль направления двигаться в левом направлении. то есть из С к С1.
Когда-то положение порта достигнуто, рычаг управления насосом переместится в положение B который останавливает насос и подача масла прекращается. Таким образом, руль останавливается на эта позиция. Наоборот, в другом направлении.
Электрогидравлический Система рулевого управления с 4-мя RAM:
Есть четыре гидроцилиндра, прикрепленные к двум рычагам приводного диска, на обоих стороны.
Эти цилиндры напрямую соединены с гидравлические насосы с электрическим приводом, которые создают гидравлическое давление за счет трубы.
Это поле гидравлического давления присутствует в насосы передают движение гидроцилиндрам, что, в свою очередь, соответствует привод для воздействия на баллер руля
• Система состоит из 2 комплектов насосно-моторного агрегата и специального масла резервуар. Он содержит гидрораспределителей , которые изменяют направление.
• Запорный клапан изолирует систему в в экстренных случаях.
• Перепускной клапан перепускает поток масла к дефектный блок.
• В течение нормальное состояние, когда нет движения, насос будет работать и масло будет рециркулировать обратно в масляный бак.
• Когда движение порта подается (например: ПОРТ 10 ) сигнал от блока управления, идет к регулирующим клапанам .
• Он движется так, чтобы масло поступало в цилиндр 1 и 4.Cyl. 1 перемещается в RHS и Cyl. 4 перемещается в LHS.
• Этот заставляет руль направления двигаться в направлении ПОРТ.
• Масло из цилиндров 3 и 2 возвращается обратно в масляный резервуар.
• Когда достигнуто желаемое положение ПОРТ , (ПОРТ 10) сигнал от блока управления коробка подходит к гидрораспределителям
• Клапан возвращается в нормальное положение. Подача масла в цилиндры 1 и 4 прекращена.
• Руль будет занимать прежнюю позицию (ПОРТ 10)
• Когда дается движение по правому борту, та же процедура продолжается, но теперь масло течет в Cyl.2 и 3.
• Возвращение масло от Cyl. 1 и 4 стекает обратно в масляный резервуар.
Электрогидравлический 2 RAM рулевой механизм:
Эта система состоят из 2 гидроцилиндров, насосов и двигателя, как показано на рис. Насос вариабельный тип вытеснения, однонаправленный, непрерывный. Может быть обратимым и переменная скорость потока.
Если масло перекачивается на левую сторону гидроцилиндра и вытягивается с правой стороны, тогда гидроцилиндр будет скользить слева направо. Культиватор движется к БОРТУ. Руль в сторону ПОРТА. Как насос останавливается, движение рычага румпеля прекращается и руль направления гидравлически заблокирован в том же положении, так как масло не может двигаться.
НАСОС ХОД РЫЧАГ предусмотрен в насосе. При нажатии вызывает поток в левый цилиндр и сбросить давление в правом цилиндре. Наоборот, если затянулось. Если он посередине положение, то ход поршня не будет, и масло не будет задерживаться в левом и правом цилиндрах.
Рабочий Пример: Когда порт 5 подается на штурвал, телемотор на рулевой рубке получает сигнал к движению порт 5.
· Рычаг L1 с точкой опоры переместится на L1 ’
· Рычаг L2 переместится на L2 ’
· В связи при этом РЫЧАГ ХОДА НАСОСА (PSL) вдавливается в насос. Поставляет масло в LHS. цилиндр и вытягивается из правого цилиндра.
· Баранов будет скользить слева направо, а руль направления движется к левому борту.
· Когда руль достигает PORT 5 в соответствии с заданной подачей, рычаг L3 потянет рычаг L2 из L2 ’ К L2 ”
· Этот переводит PSL в положение «0», как показано на рисунке.Итак, нет хода на помпу и руль направления замки в ПОРТУ 5.
· Один раз чтобы вернуть штурвал на мидель, положение рычага L1 изменится с L1 ’на L1
· PSL отводится, что вызывает поток масла с правой стороны на левую (обратный поток). Этот заставляет руль вернуться на мидель.
РУЛЕВОЕ ШЕСТЕРНЯ REG N ULATIONS:
Должен быть основным и вспомогательным рулевым механизмом , каждый независимым от Другие.Причина этого в том, что если одно выйдет из строя, то можно будет пустить в работу другого.
А где предусмотрены два идентичных силовых агрегата, вспомогательный агрегат не нужен.
Мощность и крутящий момент должны быть такими что руль направления может быть повернут от 35 ° на одну сторону до 35 ° на другая сторона с кораблем на максимальной скорости.
Время до поворот от 35 ° в одну сторону до 30 ° в другую сторону должен не более 28 секунд.
Рулевое управление редуктор должен работать от источника энергии, если диаметр баллера руля превышает 120 мм.В основном мы используем гидравлический привод для управления рулевой стойкой.
мощность вспомогательное рулевое управление должно быть таким, чтобы руль направления мог поворачиваться на 15 ° в одну сторону. до 15 ° в другую при максимальной осадке и скорости 7 узлов за 60 секунд.
Рулевое управление передача должна быть защищена от ударных нагрузок, короткого замыкания и перегрузки. и звуковые и визуальные индикаторы должны быть доступны на мосту, двигателе. диспетчерская и рулевое управление для работы двигателя, аварийных сигналов и отключений.
Низкий уровень Сигнализация должна быть там для бака гидравлического масла.
Танкер который перевозит нефть тоннажем 10000 брутто-тонн и более, должен иметь два самоуправляемые системы рулевого управления, отказ одного из которых приводит к автоматическому переключение на другое в течение 45 секунд, вместе с сигнализацией для индикации.
РУЛЕВОЕ СРЕДСТВА БЕЗОПАСНОСТИ
ДВИГАТЕЛЬ СТОРОНА:
• Электрический и механический стопор руля направления
• Высокий сигнализация температуры
• Перегрузка сигнализация
• 200% изоляция к двигателю
• Самозапускающийся после сбоя питания
• Фаза аварийная сигнализация
• Один Электродвигатель рулевого управления питается от щита аварийного выключателя
ГИДРАВЛИЧЕСКИЙ СТОРОНА :
• Облегчение Клапан
• Низкий сигнализация уровня и низкого-низкого уровня масла
• Руководство по эксплуатации Перепускной клапан
• Высокий отключение температуры смазочного масла
Рулевой механизм — Knowledge Of Sea
Назначение рулевого механизма
Рулевой механизм обеспечивает перемещение руля в ответ на сигнал с мостика для управления судном.
Несчастные случаи из-за отказа рулевого механизма — обычное дело в морской отрасли. Подобные инциденты уже приводили к ряду серьезных аварий в прошлом, в результате чего был нанесен серьезный ущерб судну, его экипажу и окружающей среде.
Обзор рулевого механизма
Направление движения корабля в воде регулируется изменением угла наклона руля, расположенного в корме корабля.
По мере того, как валовая вместимость судна увеличивается, требуется все больше и больше силы для перемещения руля направления на требуемый угол.
На большом корабле мощность, необходимая для установки руля направления, обеспечивается электрогидравлическим рулевым приводом, состоящим из силовых агрегатов, гидроцилиндров и цилиндров.
Электрогидравлический рулевой привод реагирует на команды руля, передаваемые электрически от руля в мостике судна на рулевой механизм, расположенный непосредственно над рулем в корме.
Рулевое управление (передатчик телемотора) на ходовом мостике посылает электрические сигналы на приемник телемотора, расположенный в рулевой рубке корабля.
В помещении рулевого механизма приемник телемотора посылает электрический сигнал на электромагнитные клапаны управления направлением движения.
Эти электромагнитные клапаны регулируют поток масла между:
⦁ Гидравлическим насосом
⦁ Гидравлическими цилиндрами
Есть 2 основных гидравлических насоса, которые приводят в действие гидроцилиндры. Обычно в море один насос используется, а другой находится в режиме ожидания. Их также можно запускать вместе, когда требуется более быстрое реагирование, при лоцманской проводке и в прибрежных водах.
Гидравлические цилиндры соединены с румпелем, который, в свою очередь, соединен с баллером руля.
Румпель преобразует возвратно-поступательное движение гидроцилиндров во вращательное движение баллера руля, который, в свою очередь, перемещает руль направления.
Правило СОЛАС для рулевого механизма
1. Главный и вспомогательный рулевой механизм (гидравлический)
⦁ Каждое судно должно быть оснащено эффективным главным рулевым устройством и, в соответствии с подправилом (7), эффективным вспомогательным рулевым устройством. Главный рулевой привод и вспомогательный рулевой привод должны быть расположены таким образом, чтобы отказ одного из них не приводил к выходу из строя другого.
Балка и компоненты руля
2.
(a) Компоненты рулевого механизма и баллер руля должны иметь прочную и надежную конструкцию. В частности, отдельные важные компоненты, такие как культиваторы и охотничье снаряжение, должны быть спроектированы и изготовлены таким образом, чтобы выдерживать с достаточным запасом прочности максимальные рабочие нагрузки, которым они могут подвергаться. Любые подшипники для таких основных компонентов должны быть подходящего типа, которые должны постоянно смазываться или снабжаться смазочными фитингами.
b) Расчетное давление для компонентов рулевого механизма и трубопроводов, подверженных внутреннему гидравлическому давлению, должно быть не менее 1,25-кратного максимального рабочего давления, ожидаемого при работе рулевого механизма, с учетом пульсирующего давления из-за динамических нагрузок. конструкция трубопроводов и компонентов, если сертифицирующий орган сочтет это целесообразным.
c) Предохранительные клапаны должны быть установлены на любой части гидравлической системы, которая может быть изолирована и в которой давление может создаваться силовой установкой или внешними силами.Давление, при котором срабатывают предохранительные клапаны, не должно превышать расчетное давление. Клапаны должны быть подходящего размера, чтобы избежать чрезмерного повышения давления выше расчетного.
Рулевые механизмы, кроме гидравлических
3. Рулевые механизмы, кроме гидравлических, должны соответствовать стандартам, эквивалентным тем, которые требуются настоящим правилом.
Возможность главного рулевого механизма и рулевого управления
4. Главный рулевой привод и баллер руля —
a) иметь достаточную прочность и достаточную для управления судном на максимальной рабочей скорости вперед,
b) быть способным переворачивать руль с 35 градусов с одной стороны до 35 градусов с другой стороны, когда судно движется вперед с максимальной скоростью и, при тех же условиях, от 35 градусов с каждой стороны до 30 градусов с другой стороны не более 28 секунд.
c) приводиться в действие от источника энергии, если это необходимо для выполнения требований пункта (b), и в любом случае, когда требуется, чтобы диаметр баллера руля в направлении румпеля был больше 120 миллиметров, исключая дополнительное усиление для плавания во льдах, и
d) быть сконструированы таким образом, чтобы не повредить их при максимальной скорости кормы.
Возможность вспомогательного рулевого механизма
5. Вспомогательный рулевой механизм должен:
a) иметь достаточную прочность и быть способным быстро приводиться в действие в аварийной ситуации,
b) быть способным переворачивать руль направления с 15 градусов с одной стороны до 15 градусов с другой. борта в течение не более 60 секунд, когда судно находится на самой большой морской осадке и движется вперед со скоростью, равной половине максимальной эксплуатационной скорости вперед или 07 узлов, в зависимости от того, какое из значений больше, и параграфа (b), и в любом случае, когда требуется, чтобы диаметр баллера руля по направлению к румпелю был больше 230 мм, исключая дополнительное усиление для плавания во льдах.
6. Рулевой привод силовой
a) Силовые агрегаты главного и вспомогательного рулевых приводов должны:
⦁ быть приспособлены для автоматического повторного запуска при восстановлении питания после сбоя питания.
(b) иметь возможность приводиться в действие с позиции на ходовом мостике, и
(c) иметь звуковую и визуальную сигнализацию на ходовом мостике, которая срабатывает в случае отключения питания любого блока рулевого механизма.
7. Дополнительный рулевой механизм не требуется, если
a) Вспомогательный рулевой привод не требуется, если:
b) Установлены два или более идентичных силовых агрегата рулевого механизма, которые при одновременной работе способны управлять рулем в соответствии с требованиями подпункта (4) (B) и
c) Главный рулевой механизм устроен таким образом, что после единичного отказа в его узлах трубопроводов дефект может быть локализован, чтобы можно было поддерживать или быстро восстанавливать работоспособность рулевого механизма.Рулевое устройство с подтвержденной историей надежности, которое не соответствует данному параграфу, может быть разрешено сертифицирующим органом на судах, чья стоянка была заложена до 1 сентября 1986 года.
Управление рулевым механизмом на ходовом мостике
8.
а) Управление главным рулевым приводом должно быть предусмотрено на ходовом мостике и в рулевом отсеке. Две независимые системы управления, управляемые с ходового мостика, должны быть предусмотрены для рулевого механизма, расположенного в соответствии с подпунктом (7)
Система управления с одним гидравлическим телемотором может быть разрешена сертифицирующим органом на любом судне, кроме танкера, танкера-химовоза или газовоза водоизмещением 10000 тонн и более.Рулевое колесо или рулевое колесо или рулевой рычаг дублировать не нужно.
b) Управление вспомогательным рулевым приводом должно быть предусмотрено в отсеке рулевого механизма и, если вспомогательный рулевой механизм приводится в действие от источника энергии, с ходового мостика. Любая система управления вспомогательным рулевым приводом, предусмотренная на ходовом мостике, должна быть независимой от системы управления главным рулевым приводом.
Требования к электрооборудованию
9. Каждая система управления главным и вспомогательным рулевым приводом должна:
a) Если электрическая, она должна обслуживаться собственной отдельной цепью, питаемой от силовой цепи рулевого механизма из точки в отсеке рулевого механизма или непосредственно от сборных шин распределительного щита, питающих этот рулевой механизм. цепь питания в точке на распределительном щите рядом с источником питания цепи питания рулевого механизма.
b) иметь в отсеке рулевого механизма средства для отключения системы управления от рулевого механизма, который она обслуживает,
c) иметь возможность вводить в действие с позиции на ходовом мостике,
d) иметь звуковой и визуальная сигнализация на ходовом мостике, которая сработает в случае сбоя подачи электроэнергии в систему управления и
e) Обеспечивается только защитой от короткого замыкания для цепей электроснабжения.
Цепи электроснабжения
10.
Электрические силовые цепи и система управления рулевым приводом с соответствующими компонентами, кабелями и трубами, требуемыми настоящим правилом и правилом 26, должны быть разделены, насколько это практически возможно, по всей их длине.
Средства связи
11.
Должны быть предусмотрены средства связи между ходовым мостиком и рулевым отсеком.
Угловое положение руля
12. Угловое положение руля направления должно указываться в отсеке рулевого механизма и, если главный рулевой механизм приводится в действие с электроприводом, на посту рулевого управления на ходовом мостике.Система указателя угла поворота руля должна быть независимой от какой-либо системы управления рулевым приводом.
Гидравлическая система
13. Рулевой привод с гидроусилителем должен быть оборудован: —
a) Устройства для поддержания чистоты гидравлической жидкости с учетом типа и конструкции гидравлической системы.
b) Сигнализация низкого уровня для каждого резервуара гидравлической жидкости, предназначенная для подачи звуковой и визуальной сигнализации на ходовом мостике и в машинном отделении в случае утечки гидравлической жидкости, и
c) Стационарный резервуар для хранения, имеющий достаточную емкость для перезарядите по крайней мере одну систему силового привода, включая резервуар, где требуется, чтобы главный рулевой механизм приводился в действие от источника энергии.Резервуар для хранения должен быть снабжен манометром и должен быть постоянно подключен к трубопроводам таким образом, чтобы можно было легко перезарядить гидравлические системы с места в отсеке рулевого механизма.
Доступ к отсеку рулевого механизма
14.
Отсек рулевого механизма должен быть легко доступен и, насколько это практически возможно, отделен от машинных помещений. Поручни и решетки или другие нескользящие поверхности должны быть предусмотрены для обеспечения подходящих условий работы рулевого механизма и органов управления в случае утечки гидравлической жидкости.
Инструкции по эксплуатации и блок-схема
15.
Простая инструкция по эксплуатации с блок-схемой, показывающей процедуру переключения систем дистанционного управления рулевым приводом и силовых агрегатов рулевого привода, должна, где это применимо, постоянно отображаться на ходовом мостике и в отсеке рулевого привода.
Источник аварийного питания
16.
Альтернативный источник питания должен быть обеспечен на каждом судне, где требуется диаметр баллера руля 230 мм или более, без учета каких-либо усилений для плавания во льдах.Альтернативный источник питания должен обеспечиваться автоматически в течение 45 секунд либо от аварийного источника электроэнергии, либо от независимого источника питания, расположенного в отсеке рулевого механизма. Независимый источник питания должен использоваться только для этой цели.
Альтернативный источник питания должен быть по крайней мере достаточным для обеспечения питания рулевого механизма в соответствии с требованиями к рабочим характеристикам подрегулирования (5) (b) и для связанной с ним системы управления и индикатора угла поворота руля.Альтернативный источник питания должен иметь мощность, достаточную как минимум для 30 минут непрерывной работы на каждом судне водоизмещением 10000 тонн или более 10 минут непрерывной работы на любом другом судне.
Требование для больших судов
17.
a) На каждом танкере водоизмещением 10000 тонн и более и на каждом другом судне водоизмещением 70000 тонн или более главный рулевой механизм должен иметь два или более идентичных силовых агрегата, отвечающих требованиям подпункта (7) (a)
Единичный отказ Требования
- Главный рулевой механизм каждого танкера водоизмещением 10000 тонн и более должен, в соответствии с требованиями правил (19) и (20), быть устроен таким образом, чтобы в случае потери управляемости из-за единичного отказа в любой части одной из систем силового привода, кроме заклинивания привода руля направления, способность рулевого управления должна быть восстановлена не более чем через 45 секунд после потери одной системы силового привода.Главный рулевой привод должен включать в себя: — (a) 2 независимых и отдельных системы силового привода, каждая из которых способна удовлетворять требованиям подпункта (4) (b) или (b) как минимум 2 отдельные системы силового привода, которые должны быть способны соответствие требованиям субрегулирования (4) (b) при одновременной работе в нормальном режиме. Должна быть обеспечена взаимосвязь систем гидравлического привода, если это необходимо для соблюдения этого требования. Утечка гидравлической жидкости из одной системы должна быть обнаружена, а неисправная система автоматически изолирована, чтобы другая исполнительная система или системы оставались полностью работоспособными.
Ослабление критериев единичного отказа
19. В любом танкере водоизмещением 10000 тонн и более, но дедвейтом менее 100000 тонн главный рулевой механизм может быть сконструирован таким образом, что критерий единичного отказа, требуемый подправилом (18), не применяется к исполнительному механизму руля направления или исполнительным механизмам. при условии, что:
(a) Способность рулевого управления должна быть восстановлена в течение 45 секунд после единичного отказа любой части системы трубопроводов или одного из силовых агрегатов и
(b) проектирование, конструкция и испытания привода руля направления находятся в в соответствии с требованиями приложения 2, если предусмотрен только один привод.
Режимы работы
Маневрирование
При прибытии или отъезде от причала, а также при плавании в условиях заторов оба гидроагрегата рулевого механизма работают.
Нормальная работа
Когда судно идет, один энергоблок работает, а другой находится в режиме ожидания.
Переключение силовых агрегатов происходит через каждые 24 часа работы.
Единичный отказ
Два основных силовых агрегата и сервоприводы питаются из двухсекционного бака, оборудованного переключателями уровня масла, расположенными на трех уровнях.
L1 выдает первоначальный сигнал тревоги после потери масла из любой системы.
В нормальном режиме работы один или оба силовых агрегата обеспечивают гидравлическое питание всех четырех гидроцилиндров.
Продолжается потеря масла, инициирует один или оба переключателя L2.
Они приводят в действие соответствующие сервоклапаны с электромагнитным управлением, заставляя работать комбинированные изолирующие и байпасные клапаны, разделяя систему таким образом, что каждый блок питания питает только два гидроцилиндра.
В то же время при остановке одного энергоблока он автоматически запускается, если он находится в режиме ожидания.
Дальнейшая потеря масла и система, в которой она происходит, будут управлять одним из переключателей L3.
Это отключит блоки питания на неисправной стороне. Затем рулевое управление продолжается без перебоев, но с половиной расчетного максимального крутящего момента аудиосистемы.
Неисправная система вышла из строя и изолирована.
RH Sheppard | Сервисные бюллетени и руководства Sheppard
Руководство оператора (ссылки в формате PDF)
Руководство оператора — Система активного рулевого управления Sheppard ™ от Bendix CVS BW8123
Руководство по обслуживанию (PDF-ссылки)
M Series Руководство
Руководство серии D
Руководство по обслуживанию серии 92
Активная система рулевого управления
Сервисный бюллетень (ссылки в формате PDF)
Контрольный список для поиска и устранения неисправностей
Список утвержденных жидкостей
Список комплектов уплотнений(июль 2020 г.)
Форма заказа деталей
Инструкции по профилактическому обслуживанию
Инструкции по установке комплекта уплотнений
Процедура проверки внутренней герметичности гидроусилителя рулевого управления
Инструкция по установке рулевого механизма
Процедура удаления воздуха из Kenworth для средних условий эксплуатации
Контрольный список для поиска и устранения неисправностей
Перед началом любых работ поставьте под автомобиль колодки.Соблюдайте все правила техники безопасности, изложенные в руководствах по обслуживанию рулевого механизма или от производителя вашего автомобиля. Перед проведением следующих испытаний проверьте все механические и внешние условия перед гидравлическими испытаниями. Не снимайте рулевой механизм или насос, пока не будут завершены гидравлические испытания и не будет получен авторизованный номер от Sheppard.
- Номер разрешения на возврат товаров Sheppard
- Дата
ММ слэш ДД слэш ГГГГ
- Название и местонахождение дилера
- Контактное лицо дилера
- Номер контактного телефона
- Название сервисной службы
- Адрес электронной почты
- Описание жалобы на рулевое управление
- Модель автомобиля
- Пробег
- VIN
- Модель двигателя
- Рулевой механизм Модель
- Серийный номер
- Модель ведомой шестерни (при наличии)
- Серийный номер
- Производитель насоса
- Номер по каталогу насоса
- Номинальная масса передней оси
- Производитель передней оси
ГИДРАВЛИЧЕСКИЕ ИСПЫТАНИЯ:
См. Информацию об обслуживании RH Sheppard, доступную в Интернете и в руководствах по обслуживанию рулевого механизма Sheppard®. Не снимайте рулевой механизм! Установите измеритель давления и расхода в напорную линию от насоса к шестерне, как описано в разделе «Диагностика и устранение неисправностей».Запишите следующую информацию:
- Обороты холостого хода двигателя
- Макс.обороты двигателя
- Температура масла
градусов F (Тесты следует проводить при температуре около 180F)
- Противодавление в системе на холостом ходу
PSI
- Противодавление при максимальных оборотах
- Максимальное давление в системе (настройка сброса насоса) на холостом ходу
фунтов / кв. Дюйм
- при макс. Оборотах
фунтов / кв. Холостой ход с приложенной нагрузкой 1500 фунтов на квадратный дюйм
галлонов в минуту
- Расход при максимальных оборотах при приложенной нагрузке 1500 фунтов на квадратный дюйм
галлона в минуту
- Остаётся ли рулевое колесо под давлением, когда рулевое колесо отпущено?
- ДА
- НЕТ
- Статическое давление поворота руля ПРАВО Поворот
PSI
- Левый поворот
PSI
- Давление срабатывания предохранительного плунжера ПРАВЫЙ поворот
фунт / кв.дюйм
- Падение давления до
фунтов / кв. Дюйм
- Внутренняя утечка в рулевом механизме ПРАВЫЙ поворот
фунтов / кв. Усилие ВПРАВО Поверните
In.Фунты
- ЛЕВЫЙ Поверните
дюйма Фунты